仿真样图
基于FPGA的电梯控制系统的仿真图(附程序)

系统主体模块的设计与仿真本设计是以9层的电梯控制系统为模型。
主要实现电梯运行开关的控制,楼层的请求,电梯运行遵循的方向优先原则,提前、延时开关门等基本的功能。
以下是对不同的状态进行仿真,以验证本设计的可行性。
电梯进入运行状态控制进程,通过判断上升、下降请求寄存器每一位的值,决定电梯运行状态,并通过状态指示信号输出该状态,本设计都是使用高电平触发。
(1)当电梯处于1楼时,上升请求:图4.1 电梯处于第一层时仿真图(2)提前/延时关门功能没有提前/延时关门时的情况下:图4.2 没有提前/延时关门时的仿真图从图4.2知道,运行或停止输出信号“lamp”为高电平时电梯进入运行状态,低电平时停止。
圈内显示电梯在75.36us后从停止状态转入运行状态。
当设置提前关门“close”为高电平时:图4.3 有提前关门时的仿真图图4.3与图4.2对比可知,由于设置了提前关门进程“close”,电梯提前到75.36us 以前从停止状态转入运行状态。
2当设置了延时关门“delay”为高电平时:图4.4 延时关门时的仿真图图4.4与图4.2对比可知,由于设置了延时关门进程“delay”,电梯延时到80.48us 后才从停止状态转入运行状态。
(3)当电梯处于较高层数时图4.5 电梯处于较高层数时的仿真图(5)电梯轿厢内楼层选择开关功能仿真图4.6 轿厢内楼层选择开关仿真图4(4)电梯的次态功能仿真如图4.7所示,当运行或等待时间“run_wait”计数到0110时,电梯运行状态变量“ladd”给出电梯的下一个状态。
如图 4.7圈内显示,“ladd”从0显示模块的设计与仿真图4.8 显示模块仿真图本设计的显示模块一共有3个显示部分,分别是电梯运行/等待时间显示run_wait、楼层选择指示direct以及所在楼层批示st_out。
这3个显示部分的设计结构都是一样的,所以以其中一个仿真作为例子。
从图4.8圈内看到,当电梯处于楼层2时,ledin收到信号‘0010’,经过系统内部自动转化为‘1011011’并通过ledout输出到共阴极LED数码显示。
单闭环--双闭环-仿真
单闭环--双闭环-仿真运动控制系统仿真专业:电气工程及其自动化班级:041141学号:04114067姓名:何爽1. 转速反馈控制直流调速系统各环节参数如下:直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电动机电动势系数C e=0.192Vmin/r假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后时间常数Ts=0.00167s电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数Tl=0.00167s,电力拖动系统机电时间常数Tm=0.075s转速反馈系数α=0.01Vmin/r对应额定转速时的给点电压U n*=10V1、单闭环无静差转速负反馈调速系统的仿真PI控制器在于被控对象串联时,相当于在系统中增加了一个位于原点的开环极点,同时也增加了一个位于s左半平面的开环零点。
位于原点的极点可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能,而增加得负实部零点则可减小系统的阻尼程度。
单闭环无静差转速负反馈调速系统的仿真模型:改变PI调节器的参数,单闭环无静差转速负反馈调速系统的仿真结果如下:Kp=0.25, 1/τ=3时转速电流Kp=0.56, 1/τ=11.43时转速电流Kp=0.8, 1/τ=15时转速电流分析:若调节器参数是:Kp=0.25, 1/τ=3,系统转速的响应无超调,但调节时间很长;若是:Kp=0.8, 1/τ=15,系统转速的响应的超调较大,但快速性较好。
和比例调节器相比,比例积分调节器能很好的消除静差。
以下改变Kp,而 1/τ保持不变,仿真结果如下:Kp=10, 1/τ=15时转速电流Kp=10, 1/τ=15时转速电流Kp=20, 1/τ=15时转速电流Kp=30, 1/τ=15时转速电流可见在积分系数不变时,改变比例系数时,系统由稳定,到振荡再到不稳定以下改变1/τ,而Kp保持不变,仿真结果如下:Kp=0.25, 1/τ=10时转速电流Kp=0.25, 1/τ=20时转速电流Kp=0.25, 1/τ=40时转速电流Kp=0.25, 1/τ=100时转速电流可见在保持比例系数不变,改变积分系数时系统逐渐由稳定状态过度到振荡状态在控制系统中设置调节器是为了改善系统的系统的静动态性能。
算例:分系统设备GJB151-RE102仿真

CST China
Page 3/8
机箱外接线缆辐射仿真 建模及设置
选择模板 启动 CST 设计环境™后,请选择创建一个新的 CST MS 工作室™项目。
导入模型 您完全可以在 CST MS 工作室™中直接建模机箱设备,本例中我们关注的是机箱外接线缆和内部线缆对外的辐射, 故不详细介绍模型的创建过程,而是利用 CST MS 工作室™强大的模型导入功能直接导入仿真模型。请激活模型导入模 式(File Import CST STUDIO file)。CST MS 工作室™支持 SAT,STL ,STEP,IGES,DXF,NASTRAN 等各种格 式,您可以根据需要灵活选择。导入后的模型视图如下:
CST China Ltd. | info@ | 北京市海淀区彩和坊路 8 号天创科技大厦 707C-D 室 | 邮编:100080 | 电话:010-82483820 | 传真:010-82483822 上海市黄浦区复兴东路 733 号香港名都 1201 室 | 邮编:200010 | 电话:021-50802328 | 传真:021-50802326
CST China
Page 2/8
仿真概述
本文的主要目的是仿真分系统设备 GJB151-RE102 测试的仿真,故我们需要对测试的环境有所了解。 整个测试平台构架如下图所示,符合 GJB 151A 的测试标准,其中桌面采用金属材质,桌高取 90cm,地面是金属地 网,其余五个面均为吸波材料,形成电磁兼容半波暗室。仿真时严格采用上述实测时的设置。
该机箱长约 290mm,宽 195mm,高 94mm,整个外壳材料为铝,外壳厚度为 1.3mm。机箱外壳两侧约 45%的面积覆 盖有通风孔,通风孔的直径为 1.2mm,空占比约 40%。机箱内含有六块主要的 PCB 板,每两个板子放在一个屏蔽盒里, 板子通过穿芯滤波阵列板与外部器件相连。整个机箱内部器件与外部靠两个多芯插座相连,并且通过该插座和线缆与外 接设备连接。
ProtelDXP电路仿真

复位电路
3 VVSIN n i t u o U1ALF353P 2 -15V 1 VEE A VEE VCC 84 23 1 5 1V 2 0.22uFCCap VCC 2 K 5RRes1 1 0.474uFCCap 1 K 5RRes1 n i
电路仿真步骤应用实例
电容充放电电路
v1
10V V1 VSRC
电阻、电容和电感等元器件要给出正确的参数。并注意 填写正确的单位。
仿真分立元件
➢电容
(a)无极性电容(b)有极性电容 (c)半导体电容
定值电容:无极性和有极性电容主要设置参数
✓设置电容值和电容两端的起始电压值
半导体电容
✓半导体电阻:由电容值、长度、宽度和电路初始工作时 半导体电容两端的电压决定
要给出正确的参数,并注意填写正确的单位。
➢.IC即Initial Condition(初始条件)。 ✓作用:为仿真原理图的瞬态分析设置初始条件,仿 真器根据设置的初始条件进行具体的仿真分析。
定义元件属性设置
➢初始条件设置
✓在瞬态分析中,设置了参数“Use Initial Conditions”和IC, 瞬态分析就先不进行直流工作点的分析,因而应在IC中设定 各点的直流电压。 ✓如果瞬态分析中没有设置参数“Use Initial Conditions”,那 么在瞬态分析前计算直流偏置(初始瞬态)解。这时IC设置 中指定的节点电压仅当做求解直流工作点时相应的节点的初 始值。
✓电压脉冲源VPULSE和电流脉冲源IPULSE。
✓分段线性源:通过设置不同时刻的电压或电流,产 生仿真电路需要的任意波形的电压或电流激励源。
✓分段线性电压源VPWL和分段线性电流源IPWL。
➢仿真信号源
Matlab电力电子仿真教程ppt课件
第5章 电力电子电路仿真分析
(a)
(b)
图5-7 晶闸管模块的电路符号和静态伏安特性 (a) 电路符号;(b) 静态伏安特性
第5章 电力电子电路仿真分析 SimPowerSystems库提供的晶闸管模块一共有两种:一 种是详细的模块(Detailed Thyristor),需要设置的参数较多; 另一种是简化的模块(Thyristor),参数设置较简单。晶闸管 模块的图标如图5-8。
解:(1) 按图5-5搭建仿真电路模型,选用的各模块的名 称及提取路径见表5-1。
第5章 电力电子电路仿真分析 图5-5 例5.1的仿真电路图
第5章 电力电子电路仿真分析
表5-1 例5.1仿真电路模块的名称及提取路径
模块名 功率二极管模块 D1、D2、D3、D4 交流电压源 Vs 串联 RLC 支路 R 电压表模块 VR 电流表模块 IR 信号分离模块 Demux 示波器 Scope
7所示为晶闸管模块的电路符号和静态伏安特性。当晶闸管 承受正向电压(Vak>0)且门极有正的触发脉冲(g>0)时,晶闸 管导通。触发脉冲必须足够宽,才能使阳极电流Iak大于设定 的晶闸管擎住电流I1,否则晶闸管仍要转向关断。导通的晶 闸管在阳极电流下降到0(Iak=0)或者承受反向电压时关断, 同样晶闸管承受反向电压的时间应大于设置的关断时间,否 则,尽管门极信号为0,晶闸管也可能导通。这是因为关断 时间是表示晶闸管内载流子复合的时间,是晶闸管阳极电流 降到0到晶闸管能重新施加正向电压而不会误导通的时间。
(9) “测量输出端”(Show measurement port)复选框:选 中该复选框,出现测量输出端口m,可以观测晶闸管的电流 和电压值。
【例5.2】如图5-10所示,构建单相桥式可控整流电路, 观测整流效果。晶闸管模块采用默认参数。
Multisim14电子电路仿真方法和样例
Multisim14 电子电路仿真方法和样例
2019 年 9 月
1
前言
本手册基于 Multisim14 仿真环境,从最基本的仿真电路图的建立开始,结合实际的例 子,对模拟和数字电路中常用的测试方法进行介绍。这些应用示例包括:常用半导体器件特 性曲线的测试、放大电路静态工作点和动态参数的测试、电压传输特性的测试、波形上升时 间的测试、逻辑函数的转换与化简、逻辑分析仪的使用方法等。
选定 sheet properties 即弹出图 2.3 所示界面,选中 Net names 下的 Show all(简述为
Optionsàsheet propertiesà Net namesàShow all,以下均用简述方法表述),即可在电路图中
显示出各个节点号。
4
图 2.2 移动连线
图 2.3 显示电路节点号
3
1. Multisim14 主界面简介
运行 Multisim14,自动进入电路图编辑界面。当前电路图的缺省命名为“Design1”,在 保存文件时可以选择存放路径并重新命名。Multisim14 主界面如图 1.1 所示。
图 1.1 Multisim14 用户界面
2. 仿真电路图的建立
下面以单管放大电路为例,介绍建立电路的步骤。其中三极管选用实际器件
此外,本手册侧重于测试方法的介绍,仅对主要步骤进行说明,如碰到更细节的问题, 可参阅《Multisim 14 教学版使用说明书》或其它帮助文档。
2
目录
异步电动机变频调速系统的MATLAB建模与仿真

基金项目:福建省自然科学基金项目(2008J04016)作者简介:陈四连(1984- ),女,硕士研究生,研究方向为控制系统的控制策略;林瑞全(1971- ),男,副教授,硕士生导师,博士,研究方向为控制系统的控制策略; 丁旭玮(1987- ),男,硕士研究生,研究方向为控制系统的控制策略。
异步电动机变频调速系统的MATLAB建模与仿真摘 要:为了研究异步电动机正弦脉宽调制变频调速系统在不同频率作用下的速度响应曲线,分别利用MATLAB 软件中的SIMULINK、S-function 以及微分方程编辑器(DEE)等功能模块建立两相静止坐标系下的异步电动机仿真模型。
仿真结果表明,以上三种不同的建模方法效果是一样的,均是较为方便高效的异步电动机仿真方法。
关键词:异步电动机;正弦脉宽调制;SIMULINK 建模;S-function 建模;DEE 建模中图分类号:TM921.51 文献标识码:A 文章编号:1007-3175(2009)11-0032-04陈四连,林瑞全,丁旭玮(福州大学 电气工程与自动化学院,福建 福州 350108)CHEN Si-lian LIN Rui-quan, DING Xu-wei(College of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350108, China )Abstract: In order to study speed response curves of asynchronous motor under different frequency actions, SIMULINK in MAT-LAB ,S-function and differential equation editor(DEE) etc functional Modular were used to establish asynchronous motor simula-tion model under two-phase stationary coordinate system. Simulation results show that the effects of the above three methods for modeling are the same and they are highly effective asynchronous motor simulation methods.Key words: asynchronous motor; sinusoidal pulse width modulation; SIMULINK modeling; S-function modeling; differential equation editor modelingMATLAB Modeling and Simulation of Frequency Control System forAsynchronous Motor在变频调速系统中异步电机是一个非线性、强耦合、高阶次的控制对象,如果忽略其非线性、强耦合、高阶次的条件,近似求出线性单变量动态结构,得到的控制系统的动态性能往往不高[1-2]。
运放仿真方法整理
运放仿真方法整理运算放大器的仿真包括直流工作点仿真(OP)、直流扫描仿真(DC)、交流小信号仿真(AC)、瞬态仿真(TRAN)等等。
DC仿真又包括共模输入和输出范围、输入失调电压仿真;AC仿真包括开环增益、带宽、相位裕度、共模抑制比、电源抑制比等等;TRAN仿真包括大、小信号摆率、过冲、建立时间等等。
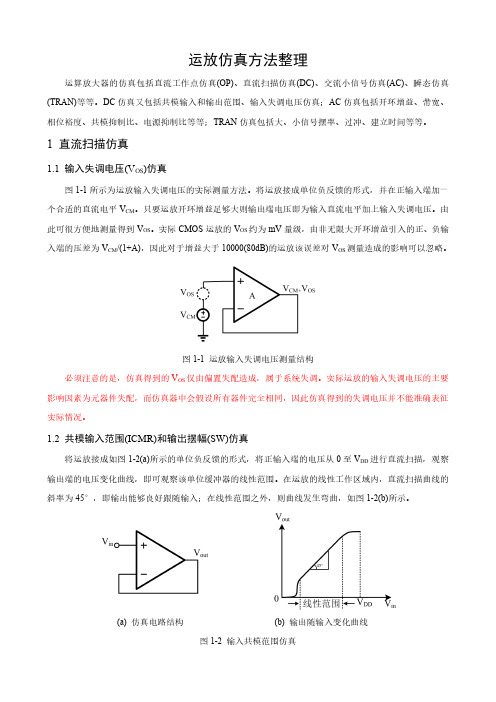
1直流扫描仿真1.1输入失调电压(V OS)仿真图1-1所示为运放输入失调电压的实际测量方法。
将运放接成单位负反馈的形式,并在正输入端加一个合适的直流电平V CM。
只要运放开环增益足够大则输出端电压即为输入直流电平加上输入失调电压。
由此可很方便地测量得到V OS。
实际CMOS运放的V OS约为mV量级,由非无限大开环增益引入的正、负输入端的压差为V CM/(1+A),因此对于增益大于10000(80dB)的运放该误差对V OS测量造成的影响可以忽略。
图1-1运放输入失调电压测量结构必须注意的是,仿真得到的V OS仅由偏置失配造成,属于系统失调。
实际运放的输入失调电压的主要影响因素为元器件失配,而仿真器中会假设所有器件完全相同,因此仿真得到的失调电压并不能准确表征实际情况。
1.2共模输入范围(ICMR)和输出摆幅(SW)仿真将运放接成如图1-2(a)所示的单位负反馈的形式,将正输入端的电压从0至V DD进行直流扫描,观察输出端的电压变化曲线,即可观察该单位缓冲器的线性范围。
在运放的线性工作区域内,直流扫描曲线的斜率为45°,即输出能够良好跟随输入;在线性范围之外,则曲线发生弯曲,如图1-2(b)所示。
(a)仿真电路结构(b)输出随输入变化曲线图1-2输入共模范围仿真用该结构仿真得到的线性范围同时受到输入共模范围和输出摆幅的限制,因此无法用该结构精确测得ICMR。
对于一般的运放,输出摆幅范围通常大于输入共模范围,故该方法能够大致预估输入共模范围。
图1-3(a)所示的反相电压放大器增益为-10。
cadence原理图仿真
cadence原理图仿真
在进行Cadence原理图仿真时,我们需要注意以下几点,以确保仿真结果的准确性和可靠性:
1. 确认所使用的元件符合仿真要求,并正确地添加到原理图中。
这包括在仿真库中选择合适的元件模型,并将其与其他元件正确地连接起来。
2. 确认仿真的电源和接地连接正确无误。
确保电源和地线的连接不会导致任何不良影响,如电压下降或噪声干扰。
3. 设置仿真参数,如仿真时间、仿真步长等。
根据所需的仿真精度和仿真效率,选择适当的仿真参数。
4. 进行信号源的设置。
这包括选择合适的信号源类型(如AC
信号、脉冲信号等)、设置信号源的频率和振幅等参数。
5. 添加测量器件,以便在仿真过程中监测所需的电压或电流。
这些测量器件可以是电压表、电流表或示波器等。
6. 设置仿真分析类型。
根据需要进行直流分析、交流分析或者是时域分析等。
选择适当的仿真分析类型以获得所需的结果。
7. 运行仿真并分析结果。
运行仿真过程,等待仿真完成后,通过分析仿真结果来获取我们所需的电压、电流或其他信号参数。
通过遵循以上步骤,我们可以在Cadence中进行原理图仿真,并获取准确可靠的仿真结果,以验证电路设计的正确性和性能。
saber仿真实例
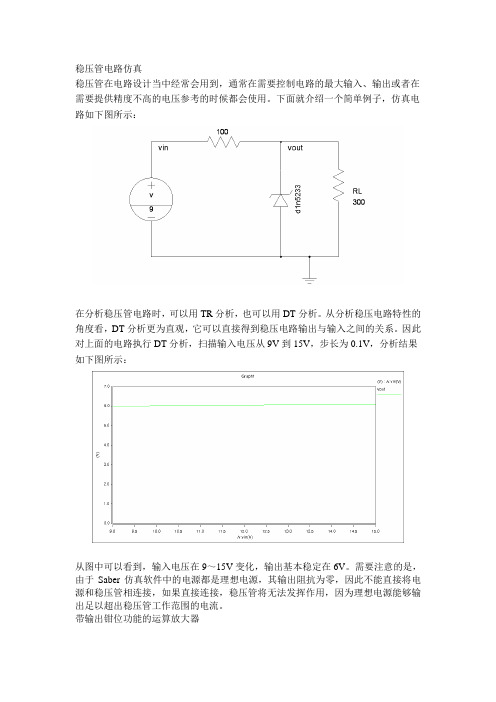
稳压管电路仿真稳压管在电路设计当中经常会用到,通常在需要控制电路的最大输入、输出或者在需要提供精度不高的电压参考的时候都会使用。
下面就介绍一个简单例子,仿真电路如下图所示:在分析稳压管电路时,可以用TR分析,也可以用DT分析。
从分析稳压电路特性的角度看,DT分析更为直观,它可以直接得到稳压电路输出与输入之间的关系。
因此对上面的电路执行DT分析,扫描输入电压从9V到15V,步长为0.1V,分析结果如下图所示:从图中可以看到,输入电压在9~15V变化,输出基本稳定在6V。
需要注意的是,由于Saber仿真软件中的电源都是理想电源,其输出阻抗为零,因此不能直接将电源和稳压管相连接,如果直接连接,稳压管将无法发挥作用,因为理想电源能够输出足以超出稳压管工作范围的电流。
带输出钳位功能的运算放大器运算放大器在电路设计中很常用,在Saber软件中提供了8个运放模板和大量的运放器件模型,因此利用Saber软件可以很方便的完成各种运方电路的仿真验证工作.如下图所示的由lm258构成的反向放大器电路, 其放大倍数是5,稳压二极管1N5233用于钳位输出电压.对该电路执行的DT分析,扫描输入电压从-2V-> 2V , 步长为0.1V, 仿真结果如下图所示:从仿真结果可以看出,当输入电压超出一定范围时, 输出电压被钳位. 输出上限时6.5V, 下限是-6.5V. 电路的放大倍数A=-5.注意:1. lm258n_3 是Saber中模型的名字, _3代表了该模型是基于第三级运算放大器模板建立的.2. Saber软件中二极管器件级模型的名字头上都带字母d, 所以d1n5233a代表1n5233的模型.5V/2A的线性稳压源仿真下图所示的电路利用78L05+TIP33C完成了对78L05集成稳压器的扩展,实现5V/2A 的输出能力。
为了考察电路的负载能力,可以在Saber软件中使用DT分析,扫描变化负载电流,得出输出电压与输出电流的关系,也就可以得到该电路的负载调整率了。
几个简单的simulink仿真模型

一频分复用和超外差接收机仿真目的1熟悉Simulink模型仿真设计方法2掌握频分复用技术在实际通信系统中的使用3理解超外差收音机的接收原理内容设计一个超外差收接收机系统,其中发送方的基带信号分别为1000Hz的正弦波和500Hz的方波,两路信号分别采用1000kHz和1200kHz的载波进行幅度调制,并在同一信道中进行传输。
要求采用超外差方式对这两路信号进行接收,并能够通过调整接收方的本振频率对解调信号进行选择。
原理超外差接收技术广泛用于无线通信系统中,基本的超外差收音机的原理框图如图所示:图1-1超外差收音机基本原理框图从图中可以看出,超外差接收机的工作过程一共分为混频、中频放大和解调三个步骤,现分别叙述如下:混频:由天线接收到的射频信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,并可根据调整控制电压随时调整振荡频率,使得器振荡频率始终比接收信号频率高一个中频频率,这样,接受信号和本机振荡在混频器中进行相乘运算后,其差频信号的频率成分就是中频频率。
其频谱搬移过程如下图所示:图1-2 超外差接收机混频器输入输出频谱中频放大:从混频模块输出的信号中包含了高频和中频两个频率成分,这样一来只要采用中频带通滤波器选出进行中频信号进行放大,得到中频放大信号。
解调:将中频放大后的信号送入包络检波器,进行包络检波,并解调出原始信号。
步骤1、设计两个信号源模块,其模块图如下所示,两个信号源模块的载波分别为1000kHz,和1200kHz,被调基带信号分别为1000Hz的正弦波和500Hz的三角波,并将其封装成两个子系统,如下图所示:图1-2 信源子系统模型图2、为了模拟接收机距离两发射机距离不同引起的传输衰减,分别以Gain1和Gain2模块分别对传输信号进行衰减,衰减参数分别为0.1和0.2。
最后在信道中加入均值为0,方差为0.01的随机白噪声,送入接收机。
3、接收机将收到的信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,其中压控振荡器由输入电压进行控制,设置Slider Gain模块,使输入参数在500至1605可调,从而实现本振的频率可控。
PSIM仿真..

1、点击新建按钮
弹出
3、点击保存按钮
2、新的电路图搭建界面
选择路径,输入文件名,按下保存即可
自动化与信工程学院电气系
--电子线路CAD--
2、分别选择元器件,放置在仿真空白界面中
A、点选元件后在电路
图中连续点左键即可连 续放置相同元件,如要 取消则按Esc; B、在未放下元件前点 选鼠标右键则可以将元 件旋转90度; C、依次放置所需元件
•开关导通时电阻10 μΩ ,
•关断为1MΩ。 •开关不需缓冲电路。
自动化与信工程学院电气系
--电子线路CAD--
PSIM允许使用10 的n 次方的数值,以下的后缀数值表示:
自动化与信工程学院电气系
--电子线路CAD--
主界面
自动化与信工程学院电气系
--电子线路CAD--
Edit菜单
自动化与信工程学院电气系
--电子线路CAD--
•三角波电源
自动化与信工程学院电气系
--电子线路CAD--
•阶跃电源
自动化与信工程学院电气系
--电子线路CAD--
•其他电源
分段线性电源
随机电源
数学功能电源
电压/电流控制源
自动化与信工程学院电气系
--电子线路CAD--
2 无源元件及支路
提供了独立电阻器,电感器,电 容器支流和集成RLC 支流。
相关元器件
自动化与信工程学院电气系
--电子线路CAD--
3、创建完成的仿真电路图,分别修改元件参数
仿真时间和步长设置
弹出
双击,修改元件参数
频率 占空比
自动化与信工程学院电气系
--电子线路CAD--
4、点击仿真按钮,仿真编译
ewb仿真实例
图1.1-3 仿真电路图
该电路中采用了匹配对接的两只二极管作为稳幅电路,其上 并联R0可适当削弱二极管的非线性影响,改善波形失真。
2. 正弦波发生器的分析 根据上述电路原理的描述,欲产生频率为1.6kHz的正弦波
信号,由
R C1 1 11 0 4 s f02 π 160 2 π0
先确定R1=R2=R=10 kΩ,从而得C1=C2=C=0.01μF。电路中 其他各元件的参数如图1.2-2所示。
可见,本电路是通过发射极电流的负反馈作用牵制集电极电 流的变化,从而使静态工作点Q保持稳定的,所以图5.1-1所示 的电路也称为电流负反馈式工作点稳定电路。
显然,Re愈大,同样的IEQ变化量所产生的UEQ变化量也愈大, 则电路的温度稳定性愈好。但是,Re增大以后,UEQ值也随之增 大,此时为了得到同样的输出电压幅度,必须增大Vcc值。
另外,如果仅接入发射极电阻Re,则电压放大倍数将大大降 低。在本电路中,在Re两端并联一个大电容Ce,若Ce足够大,则 Ce两端的交流压降可以忽略,此时,Re和Ce的接入对电压放大倍 数基本没有影响。Ce称为旁路电容。
为了保证UBQ基本稳定,要求流过分压电阻的电流IR比IBQ大 得多,为此希望电阻Rb1、Rb2 小一些。但Rb1、Rb2减小时,电阻 上消耗的功率将增大,而且放大电路的输入电阻将降低。在实际
工作中,通常选用适中的Rb1、Rb2值,一般取IR=(5~10)IBQ。且 UBQ=(5~10)UBEQ。
Saber常见电路仿真实例
Saber常见电路仿真实例一稳压管电路仿真 (2)二带输出钳位功能的运算放大器 (3)三5V/2A的线性稳压源仿真 (4)四方波发生器的仿真 (7)五整流电路的仿真 (10)六数字脉冲发生器电路的仿真 (11)七分频移相电路的仿真 (16)八梯形波发生器电路的仿真 (17)九三角波发生器电路的仿真 (18)十正弦波发生器电路的仿真 (20)十一锁相环电路的仿真 (21)一稳压管电路仿真稳压管在电路设计当中经常会用到,通常在需要控制电路的最大输入、输出或者在需要提供精度不高的电压参考的时候都会使用。
下面就介绍一个简单例子,仿真电路如下图所示:在分析稳压管电路时,可以用TR分析,也可以用DT分析。
从分析稳压电路特性的角度看,DT分析更为直观,它可以直接得到稳压电路输出与输入之间的关系。
因此对上面的电路执行DT分析,扫描输入电压从9V到15V,步长为0.1V,分析结果如下图所示:从图中可以看到,输入电压在9~15V变化,输出基本稳定在6V。
需要注意的是,由于Saber仿真软件中的电源都是理想电源,其输出阻抗为零,因此不能直接将电源和稳压管相连接,如果直接连接,稳压管将无法发挥作用,因为理想电源能够输出足以超出稳压管工作范围的电流。
二带输出钳位功能的运算放大器运算放大器在电路设计中很常用,在Saber软件中提供了8个运放模板和大量的运放器件模型,因此利用Saber软件可以很方便的完成各种运方电路的仿真验证工作.如下图所示的由lm258构成的反向放大器电路,其放大倍数是5,稳压二极管1N5233用于钳位输出电压.对该电路执行的DT分析,扫描输入电压从-2V->2V,步长为0.1V,仿真结果如下图所示:从仿真结果可以看出,当输入电压超出一定范围时,输出电压被钳位.输出上限时6.5V,下限是-6.5V.电路的放大倍数A=-5.注意:1.lm258n_3是Saber中模型的名字,_3代表了该模型是基于第三级运算放大器模板建立的.2.Saber软件中二极管器件级模型的名字头上都带字母d,所以d1n5233a代表1n5233的模型.三5V/2A的线性稳压源仿真下图所示的电路利用78L05+TIP33C完成了对78L05集成稳压器的扩展,实现5V/2A 的输出能力。
机械设计实用机构运动仿真图解

目 录前言第一部分 常用基本机构介绍1.平面连杆机构1)铰链四杆机构2)单移动副四杆机构3)双移动副四杆机构2.凸轮机构1)凸轮机构的组成及特点2)凸轮机构的分类3.齿轮机构1)齿轮机构的组成2)齿轮机构的类型4.轮系1)定轴轮系2)周转轮系3)混合轮系第二部分 运动仿真应用实例例1 雨刷器例2 扇形齿轮做摇杆的停歇送料机构例3 搅拌撒草机构例4 插秧机例5 划桨机构例6 曲柄摇杆与曲柄滑块串接机构例7 齿轮副连接曲柄摇杆与摆动导杆机构例8 利用连杆上一点近似直线轨迹的皮革抛光机构例9 割草机驱动机构例10 双面刀刃割草机驱动机构例11 肘杆夹紧机构1例12 肘杆夹紧机构2例13 双肘杆联动夹紧机构例14 不自锁推拉夹紧机构例15 多轴钻例16 平行四杆机构用于带轮涨紧机构例17 电动机皮带轮涨紧机构例18 平行四杆机构做停歇送料机构例19 六组平行四杆机构例20 梨爪伸缩机构例21 孔销联轴器例22 十字滑块联轴器例23 可逆转坐席机构例24 砂箱翻转机构例25 开关炉门机构例26 前轮转向机构例27 卸料小车挡料板自动开启机构例28 转动导杆与摆动导杆串接机构例29 转动导杆与停歇运转的摆动导杆机构例30 转动导杆切纸机构例31 曲柄摇杆与正弦串接机构例32 曲柄摆动导杆与正弦串接机构例33 曲柄摇块滑块三级机构例34 曲柄摇杆滑块三级机构例35 双曲柄与曲柄滑块串接机构例36 斜直槽双移动副机构例37 摆动导杆与双滑块机构例38 曲柄双滑块机构用于金属丝(片)成型机构例39 偏置曲柄滑块机构(弓锯床运动机构)例40 曲柄滑块与转动导杆串接机构例41 增大滑块行程机构例42 曲柄摇块机构实现近似直线轨迹例43 输出摆杆有停歇的铰链连杆机构例44 双摇杆搬运机构例45 双曲柄与转动导杆串接机构例46 转动导杆机构应用实例例47 机架长度可调的摆动导杆机构例48 摆杆极限位置可调节的铰链六杆机构例49 深拉压力机例50 用转动导杆调节切纸速度的机构例51 输入/输出均为转动的导杆机构例52 输入/输出均为转动的导杆机构应用实例例53 直线运动机构例54 双连杆送料机构例55 可实现单侧停歇的摆动导杆机构例56 从动件在极限位置有较长时间停歇的机构例57 六杆压力机机构例58 双摇杆夹紧机构例59 组合夹紧机构例60 凸轮连杆组合输送薄板机构例61 热合联动机构例62 双凸轮与铰链四杆组合的步进输送机构例63 两个相同的曲柄摇杆组合的步进输送机构例64 输出构件做停歇摆动机构例65 等宽凸轮移动间歇机构例66 蜗轮蜗杆用于挑膜机构例67 齿轮齿条用于拉膜机构例68 风扇摇头机构例69 正反转销驱动摆杆机构例70 翻转机构例71 双偏心轮驱动导杆机构例72 凸轮与转动导杆组合机构例73 切膜(纸)机构例74 气钻行星齿轮机构例75 对开螺母机构例76 齿轮升降机构例77 凸轮调节锥齿轮周转轮系输出轴转速机构例78 凸轮调节输出轴转速机构例79 手动夹爪机构例80 量筒开盖落料机构例81 保持工件姿势不变的运转机构例82 手动搅拌器例83 开门机构例84 摆动式油泵例85 手动双联行星机构例86 双凸轮控制二维移动机构例87 增大凸轮升程角转动导杆机构例88 桨轮机构例89 转动导杆与正弦机构组合的机构例90 电磁夹紧机构例91 夯土机例92 抛光机构例93 四导杆机构例94 增大摆角的摆动导杆机构例95 凸轮齿轮机构例96 螺杆充填机例97 齿轮连杆组合机构例98 两偏心齿轮往复运动机构例99 一组锥齿轮传动机构例100 双发动机速度指示机构例101 后面夹紧机构例102 螺母驱动转动压板夹紧机构例103 翻转压板与楔夹紧机构例104 针孔传动机构例105 齿轮正弦机构例106 送膜机构例107 封膜机构例108 固定槽凸轮与摆动从动杆机构例109 移动夹紧机构例110 凸轮夹紧机构例111 可调行程的凸轮绕线机构例112 开袋热合机构例113 开锁机构例114 切膜机构例115 摆动齿轮行星减速机构例116 单万向联轴器例117 双万向联轴器例118 有缺口的齿轮传动机构例119 直线导轨组合机构例120 装载机例121 从动件在极限位置有较长停歇的机构例122 移动导杆有单侧停歇的机构例123 输出摆杆有双侧停歇的机构例124 连杆上一点直线轨迹平行于机架的四杆机构例125 车制椭圆机构例126 调整刀具车制八边形机构例127 加工卵形零件的车床夹具例128 机床尾座运动机构例129 双摆杆挠性件差动机构(抛磨机)例130 平衡吊直线引导机构例131 热合夹紧机构例132 实现精确直线行星轮系连杆机构例133 实现精确直线移动的双滑块机构例134 无导轨虎钳例135 主从动轴线重合的齿轮连杆机构例136 深拉压力机机构例137 齿轮-连杆组合机构例138 带轮驱动的导杆机构例139 带固定凸轮的凸轮连杆机构例140 移动导杆近似等速移动机构例141 锁扣眼机构例142 摆动式飞剪机构例143 封罐机例144 可变节距扭绞金属线机构例145 连轧机差动减速器例146 导杆行星齿轮组合机构例147 调位-对中机构例148 拉膜辊调节机构例149 齿轮-螺旋差动机构例150 用行星齿轮实现微量进给机构例151 宽三角带式机械无级调速器例152 直线引导机构例153 平行钳口的夹钳例154 简易平口钳例155 滑槽杠杆式抓取机构结构1例156 滑槽杠杆式抓取机构结构2例157 连杆杠杆式抓取机构结构1例158 连杆杠杆式抓取机构结构2例159 连杆杠杆式抓取机构结构3例160 平板式抓取机构例161 平面平行移动连杆式抓取机构例162 手臂伸屈机构例163 圆锥齿轮行星机构机械手1例164 圆锥齿轮行星机构机械手2例165 开袋机构机械设计实用机构运动仿真图解朱金生 凌云 编著電子工業出版社Publishing House of Electronics Industry 北京·BEIJING本书是作者多年实践经验的结晶,通过对精选的典型实用运动机构的三维仿真、图解、分析,让读者轻松、快速掌握其运动原理、特点,开拓设计思路,在工作中举一反三。
multisim电路仿真图
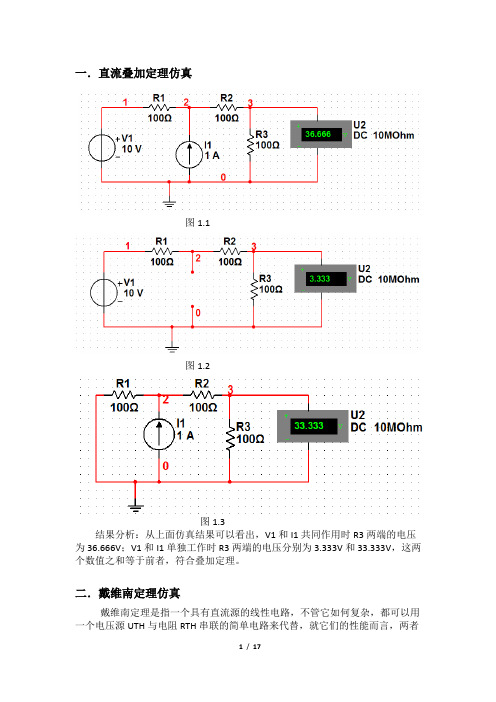
一.直流叠加定理仿真图1.1图1.2图1.3结果分析:从上面仿真结果可以看出,V1和I1共同作用时R3两端的电压为36.666V;V1和I1单独工作时R3两端的电压分别为3.333V和33.333V,这两个数值之和等于前者,符合叠加定理。
二.戴维南定理仿真戴维南定理是指一个具有直流源的线性电路,不管它如何复杂,都可以用一个电压源UTH与电阻RTH串联的简单电路来代替,就它们的性能而言,两者是相同的。
图2.1如上图2.1电路所示,可以看出在XMM1和XMM2的两个万用表的面板上显示出电流和电压值为:IRL=16.667mA,URL=3.333V。
图2.2如上图2.2所示电路中断开负载R4,用电压档测量原来R4两端的电压,记该电压为UTH,从万用表的面板上显示出来的电压为UTH=6V。
图2.3在图2.2所测量的基础之上,将直流电源V1用导线替换掉,测量R4两端的的电阻,将其记为RTH,测量结果为RTH=160Ω。
图2.4在R4和RTH 之间串联一个万用表,在R4上并接一个万用表,这时可以读出XMM1和XMM2上读数分别为:IRL1=16.667mA ,URL1=3.333V 。
结果分析:从图2.1的测试结果和图2.4的测试结果可以看出两组的数据基本一样,从而验证了戴维南定理。
三.动态电路的仿真1、一阶动态电路:V1 1 VR110kΩC110uF12图3.12、二阶动态电路分析:图3.2 2、二阶动态电路:V110 VC11uFR12kΩL11H123图3.3一阶动态电路中V2随时间的变化可以看出,在0~500ms之间随时间的增大而非线性增大,大于500ms后趋于稳定。
图3.4当R1电位器阻值分别为500Ω,2000Ω,4700Ω时,输出瞬态波形的变化如上图所示。
四.交流波形叠加仿真图4.1图4.2结果分析:在信号分析中,一个周期的波形只要满足狄利克雷条件,该波形就可以分解为傅里叶级数。
图4.1为波形叠加仿真电路,将1kHz 15V,3kHz 5V和5kHz 3V的3路正弦信号通过电阻网络予以叠加,从图4.2可以看出示波器D通道的波形正好是示波器A,B,C通道波形的叠加,满足交流波形叠加。
multisim仿真教程 案例模拟
我们将使用第5节中的简单DC电路尝试试验电路板工具。首先,从电路中删除万用
表(在尝试删除万用表之前,请务必通过按“模拟”
按钮打开模拟)。 尽管
您可以将万用表连接到面包板上,但这是不方便且不必要的。 要布线的电路应如
下图所示
图27 上一节中的简单直流电路
1. 单击主工具条(Main toolbar)面包板按钮
III 增加接地
图6 电路组件就位
8. 要添加的最后一个组件是接地。 您无法在没有接地的情况下对电路进行仿 真,因为SPICE(基础仿真引擎)使用节点分析来求解电路。 节点分析的第一 步是选择一个接地节点。 电路在何处接地无关紧要,但是为了保持一致性,让 我们选择电路底部的节点作为接地。
9.
单击电源组件菜单中的接地工具。将地拖到电路的底部,结果显示在下图中
图5 电源系列对话框. 在这里可以修改电池电压.
II 添加电阻和电位器 4. 单击基本组件系列 5. 将跳出基本组件工具条
6. 单击虚拟电阻工具条 然后拖动一个电阻到工作区. 和电池一样, 你可以双击更改电阻大小与特 性.
7. 最后,我们必须添加电位器。在“基本组件”窗口中,单击电位计工具,然后 将电位计拖到工作区上。 您可以通过按键盘上的“ A” /“ Shift + A”来增加/减小 电位计上的电阻。增大和减小是指电位计的中脚和下脚之间的电阻。 您也可以 双击电位计以打开其属性,并更改电位计的总电阻或其增量/减量值。
您的multisim窗口中工具栏的位置可能不同multisim工作区中重要的功能键如果您没有看到上面显示的工具栏请单击view菜单然后转到toolbars工原理图捕获输入简单电路首先让我们构造下图所示的简单电路
MultiSim 教程
射频仿真技术ppt课件
整理版课件
2
射频仿真软件
在技术革命不断深化的今天,不断增加的实际应用对系统设计 提出了更高的要求,具体表现在体积的小型化、模块化和功能的集 成化。这些需求也进而体现在了射频系统的设计上。在现阶段,仅 靠人工计算进行的设计方式无论是在速度上还是计算的准确性上都 已不再适应射频的系统设计。那么选择一款合适的CAD软件来加快 设计进度,提高设计的准确性已成了必然的选择。
m1 f req=250.0MHz dB(load_spectrum)=-28.920
dB(load_spectrum)
-100
-150 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 f req, GHz
Gilbert混频器的仿真及仿真结果t
Envelop仿真
系统级
System_Name
SystemInN0_dBm SystemInNPwr_dBm SystemInP1dB_dBm
SystemInSOI_dBm SystemInTOI_dBm
SystemNF_dB SystemOutN0_dBm SystemOutNPwr_dBm SystemOutP1dB_dBm SystemOutSOI_dBm SystemOutTOI_dBm SystemPGain_SS_dB
整理版课件
22
功放电路的S12仿真及结果
整理版课件
23
Batch 仿真
传统的仿真引擎一次只能处理一组数据,当需要比较同 一个电路拓扑,在不同参数下的响应的区别时,可以利用 Batch仿真!
整理版课件
24
Batch仿真及结果
dB(S(2,1))[2,::] dB(S(2,1))[1,::] dB(S(2,1))[0,::]
用ADAMS进行凸轮机构模拟仿真示例

例: 尖顶直动从动件盘形凸轮机构的凸轮基圆半径mm r 600=,已知:从动件行程mm h 40=,推程运动角为ο1500=δ,远休止角ο60=s δ,回程运动角ο1200='δ,近休止角为ο30='s δ;从动件推程、回程分别采用余弦加速度和正弦加速度运动规律。
对该凸轮机构进行模拟仿真。
解: 1. 从动件推程运动方程推程段采用余弦加速度运动规律,故将已知条件mm h 406/51500===、。
πδ代入余弦加速度运动规律的推程段方程式中,推演得到 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=≤≤=-=δωπδδωδ56cos 8.28)6/50( 56sin 24)56cos 1(202a v s 2. 从动件远休程运动方程在远休程s δ段,即6/76/5πδπ≤≤时, 0,0,===a v h s 。
3. 从动件回程运动方程 因回程段采用正弦加速度运动规律,将已知条件mm h v 403/21200==='、πδο代入正弦加速度运动规律的回程段方程式中,推演得到[]⎪⎪⎪⎩⎪⎪⎪⎨⎧--=≤≤---=⎥⎦⎤⎢⎣⎡-+-⨯=)5.33sin(180)6/116/7( )5.33cos(160)5.33sin(212375.2402πδωππδππδωππδπδπa v s 4. 从动件近休程运动方程在近休程s 'δ段,即πδπ26/11≤≤时, 0,0,0===a v s 。
创建过程1、 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:tuluen ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框2、 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10-1 10-2 10-3 10-4 10-5 15-pswfs(8) 7-pswfs(8) 3-pswfs(8) 1-pswfs
0
2
8 10 12 14 16 18 SNR /dB (a) 抖动最大值为8个点 15-pswfs(8) 7-pswfs(8) 3-pswfs(8) 1-pswfs
4
6
100
Z2
10-1
Z1 Rg Rin
(1)
Rin
(2)
10-2
16-pswfs(2) 8-pswfs(2) 4-pswfs(2) 2-pswfs(2) 1-pswfs 16-pswfs(4) 8-pswfs(4) 4-pswfs(4) 2-pswfs(4) 1-pswfs
误码率
10-3
Za
10-4 0 5 10 15 20 25
10-1 10-2 10-3 10-4 10-5
0
2
4
6
8 10 12 14 16 18 SNR /dB
(b) 抖动最大值为32个点
z P
0 幅度 /dB -20 -40 -60 -80 1 0.5 V 0 -0.5 -1 -1 -0.5 0 U 0.5 1
S R
Rn Q o y
x
说明:仿真图宽度一般控制在6cm以内,图中曲线很多、说明文字很多的图,可以适 当加宽,但最多不超过8cm。线条、字体及字号均按照样图要求。 按照以上样图尺寸制作的插图,均原大尺寸插入文中。
信噪比 /dB
120 100 网络能量消耗 /J 80 BER 60 40 20 0 0 200 400 600 800 1 000 1 200 1 400 轮数 /轮 8 BS(基站)接收的数据量 /kbit 7 6 5 4 3 2 1 0 0 20 40 60 80 100 120 网络能量消耗 /J (b) 基站接ห้องสมุดไป่ตู้数据量随能量消耗变化图 BER x104 (a) 能量消耗对比图 改进算法 SEP算法 LEACH算法 LEACH算法 SEP算法 改进算法