MEMORY存储芯片PMP5201V,115中文规格书
MEMORY存储芯片THGBMNG5D1LBAIL中文规格书

[492]
FFU features
FFU_FEATURES
1
[491]
Operation codes timeout
OPERATION_CODES_TIMEOUT
1
[490:487] FFU Argument
FFU_ARG
4
[486]
Barrier support
BARRIER_SUPPORT
1
[485:309] Reserved
4
ORRECTLY_PROGRAMMED
[301:270] Vendor proprietary health report
VENDOR_PROPRIETARY 32
_HEALTH_REPORT
[269]
Device life time estimation type B
DEVICE_LIFE_TIME_EST_TYP_B
THGBMNG5D1LBAIL
Width Cell Type
2
R
4
R
2
R
8
R
8
R
8
R
12
R
4
R
1
R
1
R
1
R
1
R
2
R
12
R
3
R
3
R
3
R
3
R
3
R
5
R
5
R
5
R
1
R
2
R
3
R
4
R
1
R
4
R
1
R
1
R/W
1
R/W
1
MEMORY存储芯片MT41J256M16RE-15EIT中文规格书

10.Release frame sync generators from reset.Note that it is necessary to release the internal frame syncgenerators from reset,even if an external frame sync is being used,because the frame sync errordetection logic is built into the frame sync generator.(a)Take the respective frame sync generator(s)out of reset by setting the RFRST bit for the receiver,and/or the XFRST bit for the transmitter in GBLCTL.All other bits in GBLCTL should be left at theprevious state.(b)Read back from GBLCTL to ensure the bit(s)to which you wrote are successfully latched inGBLCTL before you proceed.11.Upon the first frame sync signal,McASP transfers begin.The McASP synchronizes to an edge on theframe sync pin,not the level on the frame sync pin.This makes it easy to release the state machineand frame sync generators from reset.(a)For example,if you configure the McASP for a rising edge transmit frame sync,then you do notneed to wait for a low level on the frame sync pin before releasing the McASP transmitter statemachine and frame sync generators from reset.23.0.21.1.3Separate Transmit and Receive InitializationIn many cases,it is desirable to separately initialize the McASP transmitter and receiver.For example,you may delay the initialization of the transmitter until the type of data coming in on the receiver is recognized.Or a change in the incoming data stream on the receiver may necessitate a reinitialization of thetransmitter.In this case,you may still follow the sequence outlined in Section23.0.21.1.2,but use it for each section (transmit,receive)individually.The GBLCTL register is aliased to RGBLCTL and XGBLCTL to facilitate separate initialization of transmit and receive sections.Also,make sure that the initialization or reinitialization sequence follows the guidelines in Bits WithRestrictions on When They May be Changed.23.0.21.1.4Importance of Reading Back GBLCTLIn Section23.0.21.1.2,steps4b,5b,7c,9b,and10b state that GBLCTL should be read back until the bits that were written are successfully latched.This is important,because the transmitter and receiver state machines run off of the respective bit clocks,which are typically about tens to hundreds of times slower than the DSP's internal bus clock.Therefore,it takes many cycles between when the DSP writes toGBLCTL(or RGBLCTL and XGBLCTL),and when the McASP actually recognizes the write operation.If you skip this step,then the McASP may never see the reset bits in the global control registers getasserted and deasserted;resulting in an uninitialized McASP.Therefore,the logic in McASP has been implemented such that once the DSP writes GBLCTL,RGBLCTL, or XGBLCTL,the resulting write is not visible by reading back GBLCTL until the McASP has recognized the change.This typically requires two bit clocks plus two DSP bus clocks to occur.Also,if the bit clocks can be completely stopped,any software that polls GBLCTL should be implemented with a time-out.If GBLCTL does not have a time-out,and the bit clock stops,the changes written toGBLCTL will not be reflected until the bit clock restarts.Finally,please note that while RGBLCTL and XGBLCTL allow separate changing of the receive andtransmit halves of GBLCTL,they also immediately reflect the updated value(useful for debug purposes).Only GBLCTL can be used for the read back step.23.0.21.1.5Synchronous Transmit and Receive Operation(ASYNC=0)When ASYNC=0in ACLKXCTL,the transmit and receive sections operate synchronously from thetransmit section clock and transmit frame sync signals(Figure23-15).The receive section may have a different(but compatible in terms of slot size)data format.Note that when ASYNC=0,XCLK isautomatically inverted to produce RCLK(note the inversion on the ASYNC multiplexer as shown inFigure23-16).Table23-3.Channel Status and User Data for Each DIT BlockFrame Subframe Preamble Channel Status defined in:User Data defined in: Defined by DITCSRA0,DITCSRB0,DITUDRA0,DITUDRB001(L)B DITCSRA0[0]DITUDRA0[0]02(R)W DITCSRB0[0]DITUDRB0[0]11(L)M DITCSRA0[1]DITUDRA0[1]12(R)W DITCSRB0[1]DITUDRB0[1]21(L)M DITCSRA0[2]DITUDRA0[2]22(R)W DITCSRB0[2]DITUDRB0[2]……………311(L)M DITCSRA0[31]DITUDRA0[31]312(R)W DITCSRB0[31]DITUDRB0[31] Defined by DITCSRA1,DITCSRB1,DITUDRA1,DITUDRB1321(L)M DITCSRA1[0]DITUDRA1[0]322(R)W DITCSRB1[0]DITUDRB1[0]……………631(L)M DITCSRA1[31]DITUDRA1[31]632(R)W DITCSRB1[31]DITUDRB1[31] Defined by DITCSRA2,DITCSRB2,DITUDRA2,DITUDRB2641(L)M DITCSRA2[0]DITUDRA2[0]642(R)W DITCSRB2[0]DITUDRB2[0]……………951(L)M DITCSRA2[31]DITUDRA2[31]952(R)W DITCSRB2[31]DITUDRB2[31] Defined by DITCSRA3,DITCSRB3,DITUDRA3,DITUDRB3961(L)M DITCSRA3[0]DITUDRA3[0]962(R)W DITCSRB3[0]DITUDRB3[0]……………1271(L)M DITCSRA3[31]DITUDRA3[31]1272(R)W DITCSRB3[31]DITUDRB3[31] Defined by DITCSRA4,DITCSRB4,DITUDRA4,DITUDRB41281(L)M DITCSRA4[0]DITUDRA4[0]1282(R)W DITCSRB4[0]DITUDRB4[0]……………1591(L)M DITCSRA4[31]DITUDRA4[31]1592(R)W DITCSRB4[31]DITUDRB4[31] Defined by DITCSRA5,DITCSRB5,DITDRA5,DITUDRB51601(L)M DITCSRA5[0]DITUDRA5[0]1602(R)W DITCSRB5[0]DITUDRB5[0]……………1911(L)M DITCSRA5[31]DITUDRA5[31]1912(R)W DITCSRB5[31]DITUDRB5[31]。
MEMORY存储芯片PTVS16VS1UR,115中文规格书

© Nexperia B.V. 2017. All rights reserved PTVSxS1UR_SER All information provided in this document is subject to legal disclaimers.Product data sheet Rev. 3 — 10 January 2011 10 of 12Nexperia PTVSxS1UR series 400 W Transient Voltage Suppressor13.Legal information13.1 Data sheet status[1]Please consult the most recently issued document before initiating or completing a design. [2]The term ‘short data sheet’ is explained in section “Definitions”. [3]The product status of device(s) described in this document may have changed since this document was published and may differ in case of multiple devices. The latest product status information is available on the Internet at URL .13.2 DefinitionsDraft — The document is a draft version only. The content is still underinternal review and subject to formal approval, which may result inmodifications or additions. Nexperia does not give anyrepresentations or warranties as to the accuracy or completeness ofinformation included herein and shall have no liability for the consequences ofuse of such information.Short data sheet — A short data sheet is an extract from a full data sheetwith the same product type number(s) and title. A short data sheet is intendedfor quick reference only and should not be relied upon to contain detailed andfull information. For detailed and full information see the relevant full datasheet, which is available on request via the local Nexperia salesoffice. In case of any inconsistency or conflict with the short data sheet, thefull data sheet shall prevail.Product specification — The information and data provided in a Productdata sheet shall define the specification of the product as agreed betweenNexperia and its customer, unless Nexperia andcustomer have explicitly agreed otherwise in writing. In no event however,shall an agreement be valid in which the Nexperia product isdeemed to offer functions and qualities beyond those described in theProduct data sheet.13.3 Disclaimers Limited warranty and liability — Information in this document is believed to be accurate and reliable. However, Nexperia does not give any representations or warranties, expressed or implied, as to the accuracy or completeness of such information and shall have no liability for the consequences of use of such information. In no event shall Nexperia be liable for any indirect, incidental, punitive, special or consequential damages (including - without limitation - lost profits, lost savings, business interruption, costs related to the removal or replacement of any products or rework charges) whether or not such damages are based on tort (including negligence), warranty, breach of contract or any other legal theory. Notwithstanding any damages that customer might incur for any reason whatsoever, Nexperia’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms and conditions of commercial sale of Nexperia.Right to make changes — Nexperia reserves the right to make changes to information published in this document, including without limitation specifications and product descriptions, at any time and without notice. This document supersedes and replaces all information supplied prior to the publication hereof.Suitability for use — Nexperia products are not designed, authorized or warranted to be suitable for use in life support, life-critical or safety-critical systems or equipment, nor in applications where failure or malfunction of a Nexperia product can reasonably be expected to result in personal injury, death or severe property or environmental damage. Nexperia accepts no liability for inclusion and/or use of Nexperia products in such equipment or applications and therefore such inclusion and/or use is at the customer’s own risk.Applications — Applications that are described herein for any of these products are for illustrative purposes only. Nexperia makes no representation or warranty that such applications will be suitable for the specified use without further testing or modification. Customers are responsible for the design and operation of their applications and products using Nexperia products, and Nexperia accepts no liability for any assistance with applications or customer product design. It is customer’s sole responsibility to determine whether the Nexperia product is suitable and fit for the customer’s applications and products planned, as well as for the planned application and use of customer’s third party customer(s). Customers should provide appropriate design and operating safeguards to minimize the risks associated with their applications and products. Nexperia does not accept any liability related to any default, damage, costs or problem which is based on any weakness or default in the customer’s applications or products, or the application or use by customer’s third party customer(s). Customer is responsible for doing all necessarytesting for the customer’s applications and products using Nexperiaproducts in order to avoid a default of the applications andthe products or of the application or use by customer’s third partycustomer(s). Nexperia does not accept any liability in this respect.Limiting values — Stress above one or more limiting values (as defined inthe Absolute Maximum Ratings System of IEC 60134) will cause permanentdamage to the device. Limiting values are stress ratings only and (proper)operation of the device at these or any other conditions above those given inthe Recommended operating conditions section (if present) or theCharacteristics sections of this document is not warranted. Constant orrepeated exposure to limiting values will permanently and irreversibly affectthe quality and reliability of the device.Terms and conditions of commercial sale — Nexperiaproducts are sold subject to the general terms and conditions of commercialsale, as published at /profile/terms , unless otherwiseagreed in a valid written individual agreement. In case an individualagreement is concluded only the terms and conditions of the respectiveagreement shall apply. Nexperia hereby expressly objects toapplying the customer’s general terms and conditions with regard to thepurchase of Nexperia products by customer.No offer to sell or license — Nothing in this document may be interpreted orconstrued as an offer to sell products that is open for acceptance or the grant,conveyance or implication of any license under any copyrights, patents orother industrial or intellectual property rights.Export control — This document as well as the item(s) described hereinmay be subject to export control regulations. Export might require a priorauthorization from national authorities.Document status [1][2]Product status [3]Definition Objective [short] data sheetDevelopment This document contains data from the objective specification for product development. Preliminary [short] data sheetQualification This document contains data from the preliminary specification. Product [short] data sheetProduction This document contains the product specification.© Nexperia B.V. 2017. All rights reserved PTVSxS1UR_SER All information provided in this document is subject to legal disclaimers.Product data sheet Rev. 3 — 10 January 2011 4 of 12Nexperia PTVSxS1UR series 400 W Transient Voltage Suppressor6.Thermal characteristics[1]Device mounted on an FR4Printed-Circuit Board (PCB), single-sided copper, tin-plated and standard footprint.[2]Device mounted on an FR4PCB, single-sided copper, tin-plated, mounting pad for cathode 1cm 2.[3]Device mounted on a ceramic PCB, Al 2O 3, standard footprint.[4]Soldering point of cathode tab.7.CharacteristicsTable 8.Thermal characteristics Symbol Parameter Conditions Min Typ Max Unit R th(j-a)thermal resistance fromjunction to ambient in free air [1]--220K/W [2]--130K/W [3]--70K/W R th(j-sp)thermal resistance from junction to solder point [4]--18K/W Table 9.Characteristics per type; PTVS3V3S1UR to PTVS7V0S1URT j =25°C unless otherwise specified.Type number Reverse standoffvoltageV RWM (V)Breakdown voltage V BR (V)Reverse leakage current I RM (μA)Clamping voltage V CL (V)I R =10mAat V RWM (V)MaxMin Typ Max Typ Max Max I PPM (A)PTVS3V3S1UR3.3 5.20 5.60 6.0056008.043.8PTVS5V0S1UR5.06.40 6.707.0054009.243.5PTVS6V0S1UR6.0 6.677.027.37540010.338.8PTVS6V5S1UR6.57.227.607.98525011.235.7PTVS7V0S1UR 7.07.788.208.60310012.033.3Table 10.Characteristics per type; PTVS7V5S1UR to PTVS64VS1URT j =25°C unless otherwise specified.Type number Reverse standoffvoltageV RWM (V)Breakdown voltage V BR (V)Reverse leakage current I RM (μA)Clamping voltage V CL (V)I R =1mAat V RWM (V)MaxMin Typ Max Typ Max Max I PPM (A)PTVS7V5S1UR7.58.338.779.210.25012.931.0PTVS8V0S1UR8.08.899.369.830.032513.629.4PTVS8V5S1UR8.59.449.9210.400.011014.427.8PTVS9V0S1UR9.010.0010.5511.100.005515.426.0PTVS10VS1UR1011.1011.7012.300.005 2.517.023.5PTVS11VS1UR1112.2012.8513.500.005 2.518.222.0PTVS12VS1UR1213.3014.0014.700.005 2.519.920.1PTVS13VS1UR1314.4015.1515.900.0010.121.518.6。
MEMORY存储芯片MT41J512M8RA-15EAIT中文规格书

Notes: 1.Maximum limit not applicable.2.Micron tDLLK values support the legacy JEDEC tDLLK specifications.3.DDR4-1600 AC timing parameters apply if DRAM operates at lower than 1600 MT/s datarate.4.Data rate is greater than or equal to 1066 Mb/s.5.WRITE-to-READ when CRC and DM are both not enabled.6.WRITE-to-READ delay when CRC and DM are both enabled.7.The start of internal write transactions is defined as follows:•For BL8 (fixed by MRS and on-the-fly): rising clock edge four clock cycles after WL•For BC4 (on-the-fly): rising clock edge four clock cycles after WL•For BC4 (fixed by MRS): rising clock edge two clock cycles after WL8.For these parameters, the device supports t n PARAM [n CK] = ROUND{t PARAM [ns]/t CK(AVG) [ns]} according to the rounding algorithms found in the Converting Time-BasedSpecifications to Clock-Based Requirements section, in clock cycles, assuming all inputclock jitter specifications are satisfied.9.When operating in 1t CK WRITE preamble mode.10.When operating in 2t CK WRITE preamble mode.11.When CA parity mode is selected and the DLLoff mode is used, each REF command re-quires an additional "PL" added to t RFC refresh time.12.DRAM devices should be evenly addressed when being accessed. Disproportionate ac-cesses to a particular row address may result in reduction of the product lifetime and/orreduction in data retention ability.13.Applicable from t CK (AVG) MIN to t CK (AVG) MAX as stated in the Speed Bin tables.14.JEDEC specifies a minimum of five clocks.15.The maximum read postamble is bound by t DQSCK (MIN) plus t QSH (MIN) on the leftside and t HZ(DQS) MAX on the right side.16.The reference level of DQ output signal is specified with a midpoint as a widest part ofoutput signal eye, which should be approximately 0.7 × V DDQ as a center level of thestatic single-ended output peak-to-peak swing with a driver impedance of 34 ohms andan effective test load of 50 ohms to V TT = V DDQ.17.JEDEC hasn't agreed upon the definition of the deterministic jitter; the user should fo-cus on meeting the total limit.18.Spread spectrum is not included in the jitter specification values. However, the inputclock can accommodate spread-spectrum at a sweep rate in the range of 20–60 kHz withan additional 1% of t CK (AVG) as a long-term jitter component; however, the spreadspectrum may not use a clock rate below t CK (AVG) MIN.19.The actual t CAL minimum is the larger of 3 clocks or 3.748ns/t CK; the table lists the ap-plicable clocks required at targeted speed bin.20.The maximum READ preamble is bounded by t LZ(DQS) MIN on the left side and t DQSCK(MAX) on the right side. See figure in the Clock to Data Strobe Relationship section.Boundary of DQS Low-Z occurs one cycle earlier in 2t CK toggle mode, as illustrated inthe READ Preamble section.21.DQ falling signal middle-point of transferring from HIGH to LOW to first rising edge ofDQS differential signal cross-point.22.The t PDA_S/t PDA_H parameters may use the t DS/t DH limits, respectively, if the signal isLOW the entire BL8.Converting Time-Based Specifications to Clock-Based RequirementsSoftware algorithms for calculation of timing parameters are subject to potential round-ing errors when converting DRAM timing requirements to system clocks; for example, amemory clock with a nominal frequency of 933.33...3 MHz which yields a clock period of 1.0714********...ns. It is unrealistic to represent all digits after the decimal point ex-actly and some sort of rounding needs to be done.DDR4 SDRAM SPD-based specifications use a minimum granularity for SPD-associated timing parameters of 1ps. Clock periods such as t CK (AVG) MIN are defined to the near-est picosecond. For example, 1.0714********...ns is stated as 1071ps. Parameters such as t AA MIN are specified in units of time (nanoseconds) and require mathematical com-putation to convert to system clocks (n CK). Rules for rounding allow optimization of device performance without violating device parameters. These SPD algorithms rely on results that are within n CK adjustment factors on device testing and specification to avoid losing performance due to rounding errors when using SPD-based parameters. Note that JEDEC also defines an n CK adjustment factor, but mandates the inverse n CK adjustment factor be used in case of conflicting results, so only the inverse n CK adjust-ment factor is discussed here.Guidance converting SPD associated timing parameters to system clock requirements:•Round the application clock period up to the nearest picosecond.•Express the timing specification and application clock period in picoseconds; scaling a nanosecond-based parameter value by 1000 allows programmers to use integer math instead of real math by expressing timing in ps.•Divide the picosecond-based parameter by the picoseconds based application clock period.•Add an inverse n CK adjustment factor of 97.4%.•Truncate down to the next lower integer value.•n CK = Truncate[(parameter in ps)/(application t CK in ps) + (974/1000)].Guidance converting nonSPD associated timing parameters to system clock require-ments:•Divide the time base specification (in ns) and divided by the clock period (in ns).•The resultant is set to the next higher integer number of clocks.•n CK = Ceiling[(parameter in ns/application t CK in ns)].。
MEMORY存储芯片MAX125CEAX+D中文规格书
General DescriptionThe MAX125/MAX126 are high-speed, multichannel,14-bit data-acquisition systems (DAS) with simultaneous track/holds (T/Hs). These devices contain a 14-bit, 3µs,successive-approximation analog-to-digital converter (ADC), a +2.5V reference, a buffered reference input,and a bank of four simultaneous-sampling T/H ampli-fiers that preserve the relative phase information of the sampled inputs. The MAX125/MAX126 have two multi-plexed inputs for each T/H, allowing a total of eight inputs. In addition, the converter is overvoltage tolerant to ±17V; a fault condition on any channel will not harm the I C. Available input ranges are ±5V (MAX125) and ±2.5V (MAX126).An on-board sequencer converts one to four channels per CONVST pulse. In the default mode, one T/H output (CH1A) is converted. An interrupt signal (INT ) is provided after the last conversion is complete. Convert two,three, or four channels by reprogramming the MAX125/MAX126 through the bidirectional parallel interface. Once programmed, the MAX125/MAX126continue to convert the specified number of channels per CONVST pulse until they are reprogrammed. The channels are converted sequentially, beginning with CH1. The INT signal always follows the end of the last conversion in a conversion sequence. The ADC con-verts each assigned channel in 3µs and stores the result in an internal 14x4 RAM. Upon completion of the conversions, data can be accessed by applying suc-cessive pulses to the RD pin. Four successive reads access four data words sequentially.The parallel interface’s data-access and bus-release timing specifications are compatible with most popular digital signal processors and 16-bit/32-bit microproces-sors, so the MAX125/MAX126 conversion results can be accessed without resorting to wait states.ApplicationsMultiphase Motor Control Power-Grid Synchronization Power-Factor Monitoring Digital Signal Processing Vibration and Waveform AnalysisFeatures♦Four Simultaneous-Sampling T/H Amplifiers with Two Multiplexed Inputs (eight single-ended inputs total)♦3µs Conversion Time per Channel ♦Throughput: 250ksps (1 channel)142ksps (2 channels)100ksps (3 channels)76ksps (4 channels)♦Input Range: ±5V (MAX125)±2.5V (MAX126)♦Fault-Protected Input Multiplexer (±17V)♦±5V Supplies♦Internal +2.5V or External Reference Operation ♦Programmable On-Board Sequencer ♦High-Speed Parallel DSP InterfaceMAX125/MAX126________________________________________________________________Ordering InformationTypical Operating Circuit appears at end of data sheet.Pin Configuration appears at end of data sheet.PART TEMP RANGE PIN-PACKAGEINL(LSB) MAX125CCAX 0°C to +70°C 36 SSOP ±4 MAX125CEAX -40°C to +85°C 36 SSOP ±4 MAX126CCAX 0°C to +70°C 36 SSOP ±4 MAX126CEAX-40°C to +85°C36 SSOP±4_______________Detailed DescriptionThe MAX125/MAX126 use a successive-approximation conversion technique and four simultaneous-sampling track/hold (T/H) amplifiers to convert analog signals into 14-bit digital outputs. Each T/H has two multiplexed inputs, allowing a total of eight inputs. Each T/H output is converted and stored in memory to be accessed sequentially by the parallel interface with successive read cycles. The MAX125/MAX126 internal micro-sequencer can be programmed to digitize one, two,three, or four inputs sampled simultaneously from either of the two banks of four inputs (see Figure 2).The conversion timing and control sequences are derived from a 16MH z external clock, the CONVSTM A X 125/M A X 1262x4-Channel, Simultaneous-Sampling 14-Bit DAS______________________________________________________________Pin DescriptionMAX125/MAX12614-Bit DAS_______________________________________________________________________________________Figure 2.Functional Diagram1ppm/°C (max) temperature drift. Connect an external reference at REFIN as shown in Figure 7. The minimum impedance is 7kΩfor DC currents in both normal oper-ation and shutdown. Bypass REFOUT with a 4.7µF low-ESR capacitor.Power-On Reset When power is first applied, the internal power-on-reset circuitry activates the MAX125/MAX126 with INT= high, ready to convert. The default conversion mode is Input Mux A/Single-Channel Conversion. See the Programming Modes section if other configurations are desired.After the power supplies have been stabilized, the reset time is 5µs; no conversions should be performed during this phase. At power-up, data in memory is undefined.Software Power-Down Software power-down is activated by setting bit A3 of the control word high (Table 1). It is asserted after the WR or CS rising edge, at which point the ADC immedi-ately powers down to a low quiescent-current state. AV DD drops to less than 1.5mA, and AV SS is reduced to less than 1mA. The ADC blocks and reference buffer are turned off, but the digital interface and the refer-ence remain active for fast power-up recovery. Wake up the MAX125/MAX126 by writing a control word (A0–A3, Table 1). The bidirectional interface interprets a logic zero at A3 as the start signal and powers up in the mode selected by A0, A1, and A2. The referencebuffer’s settling time and the bypass capacitor’s value dominate the power-up delay. With the recommended 4.7µF at REFOUT, the power-up delay is typically 5µs.Transfer Function The MAX125/MAX126 have bipolar input ranges. Fig-ure 8 shows the bipolar/output transfer function. Code transitions occur at successive-integer least significant bit (LSB) values. Output coding is twos-complement binary with 1LSB = 610µV for the MAX125 and 1LSB = 305µV for the MAX126.Output Demultiplexer An output demultiplexer circuit is useful for isolating data from one channel in a four-channel conversion sequence. Figure 9’s circuit uses the external 16MH z clock and the INT signal to generate four RD pulses and a latch clock to save data from the desired chan-nel. CS must be low during the four RD pulses. The channel is selected with the binary coding of two switches. A 16-bit 16373 latch simplifies layout.Motor-Control Applications Vector motor control requires monitoring of the individ-ual phase currents. In their most basic application, the MAX125/MAX126 simultaneously sample two currents (CH1A and CH2A, Figure 10) and preserve the neces-sary relative phase information. Only two of the three phase currents have to be digitized, because the third component can be mathematically derived with a coor-dinate transformation.MAX125/MAX12614-Bit DAS______________________________________________________________________________________ Figure 7.External Reference Figure 8. Bipolar Transfer FunctionMAX125/MAX1262x4-Channel, Simultaneous-Sampling14-Bit DASRevision History。
MEMORY存储芯片MT41K512M8RH-125IT E中文规格书
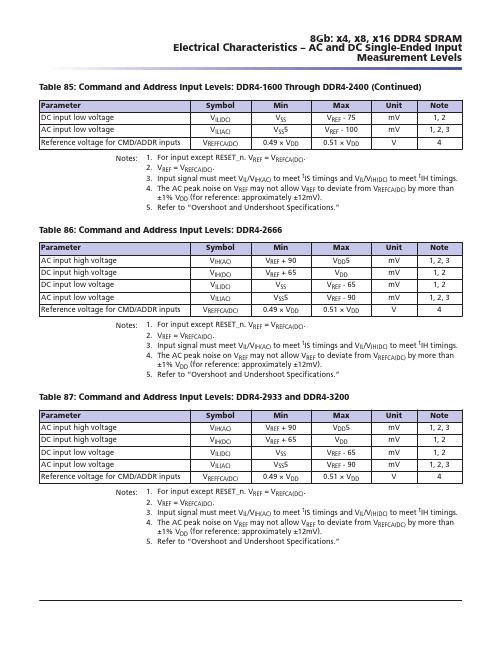
Table 85: Command and Address Input Levels: DDR4-1600 Through DDR4-2400 (Continued)Notes: 1.For input except RESET_n. V REF = V REFCA(DC).2.V REF = V REFCA(DC).3.Input signal must meet V IL /V IH(AC) to meet t IS timings and V IL /V IH(DC) to meet t IH timings.4.The AC peak noise on V REF may not allow V REF to deviate from V REFCA(DC) by more than±1% V DD (for reference: approximately ±12mV).5.Refer to “Overshoot and Undershoot Specifications.”Table 86: Command and Address Input Levels: DDR4-2666Notes: 1.For input except RESET_n. V REF = V REFCA(DC).2.V REF = V REFCA(DC).3.Input signal must meet V IL /V IH(AC) to meet t IS timings and V IL /V IH(DC) to meet t IH timings.4.The AC peak noise on V REF may not allow V REF to deviate from V REFCA(DC) by more than±1% V DD (for reference: approximately ±12mV).5.Refer to “Overshoot and Undershoot Specifications.”Table 87: Command and Address Input Levels: DDR4-2933 and DDR4-3200Notes: 1.For input except RESET_n. V REF = V REFCA(DC).2.V REF = V REFCA(DC).3.Input signal must meet V IL /V IH(AC) to meet t IS timings and V IL /V IH(DC) to meet t IH timings.4.The AC peak noise on V REF may not allow V REF to deviate from V REFCA(DC) by more than±1% V DD (for reference: approximately ±12mV).5.Refer to “Overshoot and Undershoot Specifications.”8Gb: x4, x8, x16 DDR4 SDRAM Electrical Characteristics – AC and DC Single-Ended Input Measurement LevelsFigure 223: Differential Input Slew Rate Definition for CK_t, CK_cV IH,diff,min V IL,diff,max0C K D i f f e r e n t i a l I n p u t V o l t a g e TR CK Differential Input Cross Point VoltageTo guarantee tight setup and hold times as well as output skew parameters with respectto clock and strobe, each cross point voltage of differential input signal CK_t, CK_c mustmeet the requirements shown below. The differential input cross point voltage V IX(CK) ismeasured from the actual cross point of true and complement signals to the midlevelbetween V DD and V SS .Figure 224: V IX(CK)DefinitionCK_tV SSV DD /2CK_cV DD8Gb: x4, x8, x16 DDR4 SDRAM Electrical Characteristics – AC and DC Differential Input Meas-urement LevelsData, Strobe, and Mask Overshoot and Undershoot SpecificationsTable 113: Data, Strobe, and Mask Overshoot and Undershoot/ SpecificationsFigure 231: Data, Strobe, and Mask Overshoot and Undershoot DefinitionDDQ absolute MAX SSQ absolute MIN DDQ absolute MAXSSQ MIN and V o l t s (V )V DDQ V SSQ Electrical Characteristics – AC and DC Output Measurement Levels Single-Ended OutputsTable 114: Single-Ended Output Levels8Gb: x4, x8, x16 DDR4 SDRAM Electrical Characteristics – AC and DC Output Measurement Levels。
MEMORY存储芯片MAX202ECPE中文规格书
Integrated | 2Absolute Maximum RatingsV CC ..........................................................................-0.3V to +6VV+................................................................(V CC - 0.3V) to +14VV-............................................................................-14V to +0.3VInput VoltagesT_IN............................................................-0.3V to (V+ + 0.3V)R_IN...................................................................................±30VOutput VoltagesT_OUT.................................................(V- - 0.3V) to (V+ + 0.3V)R_OUT......................................................-0.3V to (V CC + 0.3V)Short-Circuit Duration, T_OUT....................................ContinuousContinuous Power Dissipation (T A = +70°C)16-Pin Plastic DIP (derate 10.53mW/°C above +70°C)....842mW16-Pin Narrow SO (derate 8.70mW/°C above +70°C).....696mW16-Pin Wide SO (derate 9.52mW/°C above +70°C)......762mW16-Pin TSSOP (derate 9.4mW/°C above +70°C)...........755mW 20-Pin Plastic DIP (derate 11.11mW/°C above +70°C)...889mW 20-Pin SO (derate 10.00mW/°C above +70°C).............800mW 24-Pin Narrow Plastic DIP (derate 13.33mW/°C above +70°C) ...............................1.07W 24-Pin Wide Plastic DIP (derate 14.29mW/°C above +70°C)................................1.14W 24-Pin SO (derate 11.76mW/°C above +70°C).............941mW 24-Pin SSOP (derate 8.00mW/°C above +70°C)..........640mW 28-Pin SO (derate 12.50mW/°C above +70°C)....................1W 28-Pin SSOP (derate 9.52mW/°C above +70°C)..........762mW Operating Temperature Ranges MAX2_ _EC_ _.....................................................0°C to +70°C MAX2_ _EE_ _...................................................-40°C to +85°C Storage Temperature Range.............................-65°C to +165°C Lead Temperature (soldering, 10s).................................+300°C Electrical Characteristics(V CC = +5V ±10% for MAX202E/206E/208E/211E/213E/232E/241E; V CC = +5V ±5% for MAX203E/205E/207E; C1–C4 = 0.1µF for MAX202E/206E/207E/208E/211E/213E; C1–C4 = 1µF for MAX232E/241E; T A = T MIN to T MAX ; unless otherwise noted. Typical values are at T A = +25°C.)Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.找MEMORY 、二三极管上美光存储Integrated | 12MAX202E–MAX213E,MAX232E/MAX241E±15kV ESD-Protected, 5V RS-232 Transceivers Model. F igure 7b shows the current waveform for the 8kV IEC1000-4-2 level-four ESD contact-discharge test.The air-gap test involves approaching the device with a charged probe. The contact-discharge method con-nects the probe to the device before the probe is ener-gized.Machine Model The Machine Model for ESD tests all pins using a 200pF storage capacitor and zero discharge resis-tance. Its objective is to emulate the stress caused by contact that occurs with handling and assembly during manufacturing. Of course, all pins require this protec-tion during manufacturing, not just RS-232 inputs andFigure 7a. IEC1000-4-2 ESD Test Modelest, which is then discharged into the test device through a 1.5k Ω resistor.IEC1000-4-2The IEC1000-4-2 standard covers ESD testing and per-formance of finished equipment; it does not specifically refer to integrated circuits. The MAX202E/MAX203E–MAX213E, MAX232E/MAX241E help you design equipment that meets level 4 (the high-est level) of IEC1000-4-2, without the need for addition-al ESD-protection components.The major difference between tests done using the Human Body Model and IEC1000-4-2 is higher peak current in IEC1000-4-2, because series resistance is lower in the IEC1000-4-2 model. Hence, the ESD with-stand voltage measured to IEC1000-4-2 is generallylower than that measured using the Human BodyFigure 7b. IEC1000-4-2 ESD Generator Current Waveform Figure 6a. Human Body ESD Test ModelFigure 6b. Human Body Model Current Waveform。
MEMORY存储芯片MT41J256M16RE-15E中文规格书
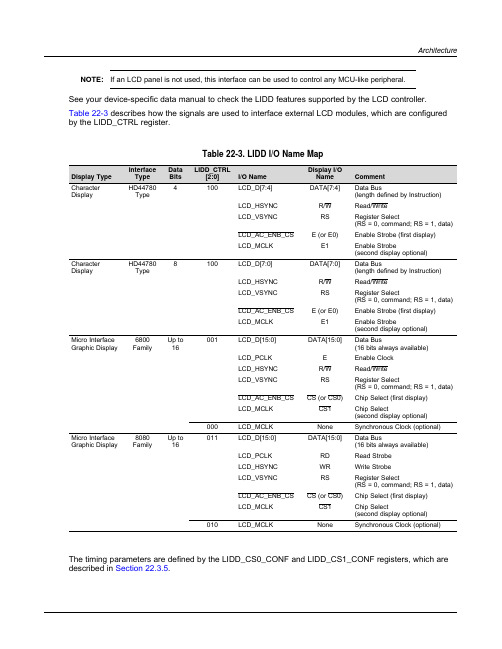
Architecture NOTE:If an LCD panel is not used,this interface can be used to control any MCU-like peripheral.See your device-specific data manual to check the LIDD features supported by the LCD controller.Table22-3describes how the signals are used to interface external LCD modules,which are configured by the LIDD_CTRL register.Table22-3.LIDD I/O Name MapDisplay Type InterfaceTypeDataBitsLIDD_CTRL[2:0]I/O NameDisplay I/OName CommentCharacter Display HD44780Type4100LCD_D[7:4]DATA[7:4]Data Bus(length defined by Instruction)LCD_HSYNC R/W Read/WriteLCD_VSYNC RS Register Select(RS=0,command;RS=1,data)LCD_AC_ENB_CS E(or E0)Enable Strobe(first display)LCD_MCLK E1Enable Strobe(second display optional)Character Display HD44780Type8100LCD_D[7:0]DATA[7:0]Data Bus(length defined by Instruction)LCD_HSYNC R/W Read/WriteLCD_VSYNC RS Register Select(RS=0,command;RS=1,data)LCD_AC_ENB_CS E(or E0)Enable Strobe(first display)LCD_MCLK E1Enable Strobe(second display optional)Micro Interface Graphic Display6800FamilyUp to16001LCD_D[15:0]DATA[15:0]Data Bus(16bits always available)LCD_PCLK E Enable ClockLCD_HSYNC R/W Read/WriteLCD_VSYNC RS Register Select(RS=0,command;RS=1,data)LCD_AC_ENB_CS CS(or CS0)Chip Select(first display)LCD_MCLK CS1Chip Select(second display optional)000LCD_MCLK None Synchronous Clock(optional)Micro Interface Graphic Display8080FamilyUp to16011LCD_D[15:0]DATA[15:0]Data Bus(16bits always available)LCD_PCLK RD Read StrobeLCD_HSYNC WR Write StrobeLCD_VSYNC RS Register Select(RS=0,command;RS=1,data)LCD_AC_ENB_CS CS(or CS0)Chip Select(first display)LCD_MCLK CS1Chip Select(second display optional)010LCD_MCLK None Synchronous Clock(optional)The timing parameters are defined by the LIDD_CS0_CONF and LIDD_CS1_CONF registers,which are described in Section22.3.5.Architecture Table22-7.Color/Grayscale Intensities and Modulation RatesDither Value(4-Bit Value from Palette)Intensity(0%is White)Modulation Rate(Ratio of ON to ON+OFF Pixels)00000.0%0000111.1%1/9001020.0%1/5001126.7%4/15010033.3%3/9010140.0%2/5011044.4%4/9011150.0%1/2100055.6%5/9100160.0%3/5101066.6%6/9101173.3%11/15110080.0%4/5110188.9%8/91110100.0%11111100.0%122.2.5.4.3Summary of Color DepthTable22-8.Number of Colors/Shades of Gray Available on ScreenNumber ofBPPPassive Mode(TFT_STN=0)Active Mode(TFT_STN=1) Monochrome(MONO_COLOR=1)Color(MONO_COLOR=0)Color Only(MONO_COLOR=0)12palette entries to select within 15grayscales 2palette entries to select within3375possible colors2palette entries to select within4096possible colors24palette entries to select within 15grayscales 4palette entries to select within3375possible colors4palette entries to select within4096possible colors416palette entries to select within 15grayscales 16palette entries to select within3375possible colors16palette entries to select within4096possible colors8Not relevant since it would consist in 256palette entries to select within15grayscales,but exists anyway 256palette entries to select3375possible colors256palette entries to select within4096possible colors12x3375possible colors4096possible colors16x3375possible colors(STN_565=1)Up to65536possible colors。
MEMORY存储芯片MT41K512M16TNA-15EM E中文规格书

Figure 163: Rx Compliance MaskV CENTDQ,midpoint is defined as the midpoint between the largest V REFDQ voltage level andthe smallest V REFDQ voltage level across all DQ pins for a given DRAM. Each DQ pin'sV REFDQ is defined by the center (widest opening) of the cumulative data input eye as de-picted in the following figure. This means a DRAM's level variation is accounted forwithin the DRAM Rx mask. The DRAM V REFDQ level will be set by the system to accountfor R ON and ODT settings.Figure 164: V CENT_DQ V REFDQ Voltage VariationV CENTDQ,midpointThe following figure shows the Rx mask requirements both from a midpoint-to-mid-point reference (left side) and from an edge-to-edge reference. The intent is not to addany new requirement or specification between the two but rather how to convert therelationship between the two methodologies. The minimum data-eye shown in thecomposite view is not actually obtainable due to the minimum pulse width require-ment.8Gb: x8, x16 Automotive DDR4 SDRAM WRITE OperationFigure 199: Synchronous ODT Timing with BL8diff_CKCommandODTDRAM_R TT TransitioningNotes: 1.Example for CWL = 9, AL = 0, PL = 0; DODTLon = AL + PL + CWL - 2 = 7; DODTLoff = AL +PL + CWL - 2 = 7.2.ODT must be held HIGH for at least ODTH8 after assertion (T1).Figure 200: Synchronous ODT with BC4diff_CKCommandODTDRAM_R TT T1T0T2T3T4T5T18T19T20T21T22T23T36T37T38T39T40T4142TransitioningNotes: 1.Example for CWL = 9, AL = 10, PL = 0; DODTLon/off = AL + PL+ CWL - 2 = 17; ODTcnw =AL + PL+ CWL - 2 = 17.2.ODT must be held HIGH for at least ODTH4 after assertion (T1).8Gb: x8, x16 Automotive DDR4 SDRAM Synchronous ODT Mode。
MEMORY存储芯片PESD5V0V1BDSF中文规格书

1.Product profile1.1General descriptionVery low capacitance bidirectional ElectroStatic Discharge (ESD) protection diode in aDSN0603-2 (SOD962) leadless ultra small Surface-Mounted Device (SMD) package designed to protect one signal line from the damage caused by ESD and other transients.1.2Features and benefits⏹Bidirectional ESD protection of one line ⏹Very low diode capacitance C d =5.3pF⏹ESD protection up to ±25kV according to IEC 61000-4-2⏹Ultra small SMD package⏹Optimized diode structure for ultra high ESD robustness1.3Applications⏹Cellular handsets and accessories ⏹Portable electronics⏹Communication systems ⏹Computers and peripherals1.4Quick reference data2.Pinning informationPESD5V0V1BDSFVery low capacitance bidirectional ESD protection diodeRev. 1 — 17 April 2012Product data sheetTable 1.Quick reference dataT amb =25︒C unless otherwise specified.Symbol ParameterConditionsMin Typ Max Unit V RWM reverse standoff voltage --5V C ddiode capacitancef =1MHz; V R =0V 45.36pFTable 2.Pinning3.Ordering information4.Marking5.Limiting values[1]Non-repetitive current pulse 8/20μs exponentially decaying waveform according to IEC 61000-4-5.Table 3.Ordering informationType number Package NameDescriptionVersion PESD5V0V1BDSFDSN0603-2leadless ultra small package; 2terminals;body 0.6⨯0.3⨯0.3mmSOD962Table 4.Marking codesType number Marking code PESD5V0V1BDSFDTable 5.Limiting valuesIn accordance with the Absolute Maximum Rating System (IEC 60134).Symbol Parameter Conditions Min Max Unit P PP peak pulse power t p =8/20μs [1]-20W I PP peak pulse current t p =8/20μs[1]-2A T j junction temperature -150︒C T amb ambient temperature -55+150︒C T stgstorage temperature-65+150︒C[1]Device stressed with ten non-repetitive ESD pulses.Table 6.ESD maximum ratings Symbol Parameter ConditionsMin Max Unit V ESDelectrostaticdischarge voltageIEC 61000-4-2 (contact discharge)[1]-25kV IEC 61000-4-2 (air discharge)-25kV MIL-STD-883 (human body model)-10kVTable 7.ESD standards complianceStandardConditionsIEC 61000-4-2, level 4(ESD)>15kV (air); >8kV (contact)MIL-STD-883; class 3B (human body model)>8kV6.Characteristics[1]Non-repetitive current pulse 8/20μs exponential decay waveform according to IEC 61000-4-5.[2]Non-repetitive current pulse, Transmission Line Pulse (TLP)t p =100ns; square pulse;ANS/IESD STM5.1-2008.Table 8.CharacteristicsT amb =25︒C unless otherwise specified.Symbol Parameter Conditions Min Typ Max Unit V RWM reverse standoff voltage--5V I RM reverse leakage currentV RWM =5V -1100nA V CL clamping voltage I PP =0.5A [1]--11.5V I PP =1A [1]--12.8V V BR breakdown voltage I R =1mA6-10V C d diode capacitance f =1MHz; V R =0V4 5.36pF r dyndynamic resistance[2]-2.0-Ω。
MEMORY存储芯片W25Q128JVSIQ中文规格书

8.2.31Read Security Registers (48h)The Read Security Register instruction is similar to the Fast Read instruction and allows one or more data bytes to be sequentially read from one of the four security registers. The instruction is initiated by driving the /CS pin low and t hen shifting the instruction code “48h” followed by a 24-bit address (A23-A0) and eight “dummy” clocks into the DI pin. The code and address bits are latched on the rising edge of the CLK pin. After the address is received, the data byte of the addressed memory location will be shifted out on the DO pin at the falling edge of CLK with most significant bit (MSB) first. The byte address is automatically incremented to the next byte address after each byte of data is shifted out. Once the byte address reaches the last byte of the register (byte address FFh), it will reset to address 00h, the first byte of the register, and continue to increment. The instruction is completed by driving /CS high. The Read Security Register instruction sequence is shown in Figure 47. If a Read Security Register instruction is issued while an Erase, Program or Write cycle is in process (BUSY=1) the instruction is ignored and will not have any effects on the current cycle. The Read Security Register instruction allows clock rates fromD.C. to a maximum of F R (see AC Electrical Characteristics).Figure 47. Read Security Registers Instruction8.2.35Global Block/Sector Lock (7Eh)All Block/Sector Lock bits can be set to 1 by the Global Block/Sector Lock instruction. The command must be issued by driving /CS low, shifting the instruction code “7Eh” into the Data Input (DI) p in on the rising edge of CLK, and then driving /CS high. A Write Enable instruction must be executed before the device will accept the Global Block/Sector Lock Instruction (Status Register bit WEL= 1).Figure 56. Global Block Lock Instruction for SPI Mode8.2.36Global Block/Sector Unlock (98h)All Block/Sector Lock bits can be set to 0 by the Global Block/Sector Unlock instruction. The command must be issued by driving /CS low, shifting the instruction code “98h” into the Data Input (DI) pin on the rising edge of CLK, and then driving /CS high. A Write Enable instruction must be executed before the device will accept the Global Block/Sector Unlock Instruction (Status Register bit WEL= 1).Figure 57. Global Block Unlock Instruction for SPI Mode9.ELECTRICAL CHARACTERISTICS9.1Absolute Maximum Ratings(1)Notes:1.This device has been designed and tested for the specified operation ranges. Proper operation outside of these levels is not guaranteed. Exposure to absolute maximum ratings may affect device reliability. Exposure beyond absolute maximum ratings may cause permanent damage.pliant with JEDEC Standard J-STD-20C for small body Sn-Pb or Pb-free (Green) assembly and the European directive on restrictions on hazardous substances (RoHS) 2002/95/EU.3.JEDEC Std JESD22-A114A (C1=100pF, R1=1500 ohms, R2=500 ohms).9.2Operating RangesNote:1.VCC voltage during Read can operate across the min and max range but should not exceed ±10% ofthe programming (erase/write) voltage.9.3Power-Up Power-Down Timing and RequirementsNote:1.These parameters are characterized only.Figure 58a. Power-up Timing and Voltage LevelsFigure 58b. Power-up, Power-Down Requirement9.4DC Electrical Characteristics-。
MEMORY存储芯片ICM-20600中文规格书

MEMORY存储芯片ICM-20600中文规格书GENERAL DESCRIPTIONThe ICM-20600 is a 6-axis MotionTracking device that combines a 3-axis gyroscope, 3-axis accelerometer, in a small 2.5 mm x 3 mm x 0.91 mm (14-pin LGA) package.High performance specso Gyroscope sensitivity error: ±1%o Gyroscope noise: ±4 mdps/√Hzo Accelerometer noise: 100 μg/√HzIncludes 1 KB FIFO to reduce traffic on the serial bus interface, and reduce power consumption by allowingthe system processor to burst read sensor data and then go into a low-power modeEIS FSYNC supportICM-20600 includes on-chip 16-bit ADCs, programmable digital filters, an embedded temperature sensor, and programmable interrupts. The device features an operating voltage range down to 1.71V. Communication ports include I2C and high speed SPI at 10 MHz.ORDERING INFORMATIONBLOCK DIAGRAMAPPLICATIONSSmartphones and TabletsWearable SensorsIoT ApplicationsMotion-based game controllers3D remote controls for Internet connected DTVs and set top boxes, 3D miceFEATURES3-Axis Gyroscope with Programmable FSR of ±250 dps, ±500 dps, ±1000 dps, and ±2000 dps ?3-Axis Accelerometer with Programmable FSR of ±2g,±4g, ±8g, and ±16gUser-programmable interruptsWake-on-motion interrupt for low power operation of applications processor1 KB FIFO buffer enables the applications processor to read the data in burstsOn-Chip 16-bit ADCs and Programmable FiltersHost interface: 10 MHz SPI or 400 kHz Fast Mode I2C ?Digital-output temperature sensorVDD operating range of 1.71 to 3.45VMEMS structure hermetically sealed and bonded at wafer levelRoHS and Green compliantTYPICAL OPERATING CIRCUIT3.45VDC SDOFm F3ELECTRICAL CHARACTERISTICS3.1GYROSCOPE SPECIFICATIONSTypical Operating Circuit of section 4.2, VDD = 1.8V, VDDIO = 1.8V, T A=25°C, unless otherwise noted.Table 1. Gyroscope SpecificationsNotes:1.Target spec. Subject to update.2.Tested in production.3.Guaranteed by design.4.Noise specifications shown are for low-noise mode.4.2 TYPICAL OPERATING CIRCUIT3.45VDCAD0Fm FFigure 4. ICM-20600 LGA Application Schematic (I 2C Operation)Note: I2C lines are open drain and pullup resistors (e.g. 10kΩ) are required.3.45VDCSDOFm FFigure 5. ICM-20600 LGA Application Schematic (SPI Operation)4.3 Table 10. Bill of Materials4.4BLOCK DIAGRAMFigure 6. ICM-20600 Block Diagram4.5OVERVIEWThe ICM-20600 is comprised of the following key blocks and functions:Three-axis MEMS rate gyroscope sensor with 16-bit ADCs and signal conditioningThree-axis MEMS accelerometer sensor with 16-bit ADCs and signal conditioningPrimary I2C and SPI serial communications interfacesSelf-TestClockingSensor Data RegistersFIFOInterruptsDigital-Output Temperature SensorBias and LDOsCharge PumpStandard Power Modes4.6THREE-AXIS MEMS GYROSCOPE WITH 16-BIT ADCS AND SIGNAL CONDITIONINGThe ICM-20600 consists of three independent vibratory MEMS rate gyroscopes, which detect rotation about the X-, Y-, and Z- Axes. When the gyros are rotated about any of the sense axes, the Coriolis Effect causes a vibration that is detected by a capacitive pickoff. The resulting signal is amplified, demodulated, and filtered to produce a voltage that is proportional to the angular rate. This voltage is digitized using individual on-chip 16-bit Analog-to-Digital Converters (ADCs) to sample each axis. The full-scale range of the gyro sensors may be digitally programmed to ±250, ±500, ±1000, or ±2000 degrees per second (dps). The ADC sample rate is programmable from 8,000 samples per second, down to 3.9 samples per second, and user-selectable low-pass filters enable a wide range of cut-off frequencies.4.7THREE-AXIS MEMS ACCELEROMETER WITH 16-BIT ADCS AND SIGNAL CONDITIONINGThe ICM-20600’s 3-Axis accelerometer uses separate proof masses for each axis. Acceleration along a particular axis induces displacement on the corresponding proof mass, and capacitive sensors detect the displacement differentially. The ICM-20600’s architecture reduces the accelerom eters’ susceptibility to fabrication variations as well as to thermal drift. When the device is placed on a flat surface, it will measure 0g on the X- and Y-axes and +1g on the Z-axis. The accelerometers’ sc ale factor is calibrated at the factory and is nominally independent of supply voltage. Each sensor has a dedicated sigma-delta ADC forproviding digital outputs. The full scale range of the digital output can be adjusted to ±2g, ±4g, ±8g, or ±16g.4.8I2C AND SPI SERIAL COMMUNICATIONS INTERFACESThe ICM-20600 communicates to a system processor using either a SPI or an I2C serial interface. The ICM-20600 always acts as a slave when communicating to the system processor. The LSB of the I2C slave address is set by pin 1 (AD0).ICM-20600 Solution Using I2C InterfaceIn Figure 7, the system processor is an I2C master to the ICM-20600.。
MEMORY存储芯片MT41K512M8THV-15E H中文规格书

x x x x 1 0 0 1 Reserved
x x x x : : : : Reserved
x x x x 1 1 1 1 Reserved
Note: 1. MAC encoding in MPR Page 3 MPR3.
8Gb: x4, x8, x16 DDR4 SDRAM Electrical Characteristics – AC and DC Output Driver Charac-
xxxx1000
Unlimited
There is no restriction to the number of ACTIVATE commands to a given row in a refresh period provided DRAM timing specifications are not violated.
Micron's DDR4 devices automatically perform a type of TRR mode in the background and provide an MPR Page 3 MPR3[3:0] of 1000, indicating there is no restriction to the number of ACTIVATE commands to a given row in a refresh period provided DRAM timing specifications are not violated. However, specific attempts to by-pass TRR may result in data disturb.
teristics
Figure 236: Connectivity Test Mode Output Slew Rate Definition
MEMORY存储芯片MK22FN1M0AVMC12中文规格书

4Ratings4.1Thermal handling ratings1.Determined according to JEDEC Standard JESD22-A103, High Temperature Storage Life.2.Determined according to IPC/JEDEC Standard J-STD-020, Moisture/Reflow Sensitivity Classification for NonhermeticSolid State Surface Mount Devices.4.2Moisture handling ratings1.Determined according to IPC/JEDEC Standard J-STD-020, Moisture/Reflow Sensitivity Classification for NonhermeticSolid State Surface Mount Devices.4.3ESD handling ratings1.Determined according to JEDEC Standard JESD22-A114, Electrostatic Discharge (ESD) Sensitivity Testing Human BodyModel (HBM).2.Determined according to JEDEC Standard JESD22-C101, Field-Induced Charged-Device Model Test Method forElectrostatic-Discharge-Withstand Thresholds of Microelectronic Components.3.Determined according to JEDEC Standard JESD78, IC Latch-Up Test.4.4Voltage and current operating ratingsK20 Sub-Family Data Sheet, Rev. 3, 6/2013.Freescale Semiconductor, Inc.111.Analog pins are defined as pins that do not have an associated general purpose I/O port function.5General5.1AC electrical characteristicsUnless otherwise specified, propagation delays are measured from the 50% to the 50%point, and rise and fall times are measured at the 20% and 80% points, as shown in the following figure.Figure 1. Input signal measurement referenceAll digital I/O switching characteristics assume:1.output pins•have C L =30pF loads,•are configured for fast slew rate (PORTx_PCRn[SRE]=0), and•are configured for high drive strength (PORTx_PCRn[DSE]=1)2.input pins•have their passive filter disabled (PORTx_PCRn[PFE]=0)K20 Sub-Family Data Sheet, Rev. 3, 6/2013.12Freescale Semiconductor, Inc.。
MEMORY存储芯片MT41K512M16TSR-125 E中文规格书

0.24 0.24 0.30 0.30 0.0083 0.0071
0.24 0.30 0.0062
0.24 0.24 0.24 0.24 0.30 0.30 0.30 0.30 0.0055 0.0055 0.0055 0.0055
Area B maximum overshoot area per 1tCK
8Gb: x8, x16 Automotive DDR4 SDRAM Electrical Characteristics – Overshoot and Undershoot Specifi-
cations
Electrical Characteristics – Overshoot and Undershoot Specifications
Address, Command, and Control Overshoot and Undershoot Specifications
Table 109: ADDR, CMD, CNTL Overshoot and Undershoot/Specifications
Description
DDR4- DDR4- DDR4- DDR4- DDR4- DDR4- DDR41600 1866 2133 2400 2666 2933 3200
Write leveling (WL) – Write leveling mode 0 = Disabled (normal operation) 1 = Enabled (enter WL mode)
Rx CTLE Control 000 = Vendor Default 001 = Vendor Defined 010 = Vendor Defined 011 = Vendor Defined 100 = Vendor Defined 101 = Vendor Defined 110 = Vendor Defined 111 = Vendor Defined
MEMORY存储芯片PC28F512G18FF中文规格书
ArchitectureSPRUH79C–April2013–Revised September2016 Submit Documentation Feedback EMAC/MDIO Module17.2.9.1.3Receive Flow ControlWhen enabled and triggered,receive flow control is initiated to limit the EMAC from further framereception.Two forms of receive buffer flow control are available:•Collision-based flow control for half-duplex mode•IEEE802.3x pause frames flow control for full-duplex modeIn either case,receive flow control prevents frame reception by issuing the flow control appropriate for the current mode of operation.Receive flow control prevents reception of frames on the EMAC until all of the triggering conditions clear,at which time frames may again be received by the EMAC.Receive flow control is enabled by the RXBUFFERFLOWEN bit in the MAC control register(MACCONTROL).The EMAC is configured for collision or IEEE802.3X flow control using theFULLDUPLEX bit in MACCONTROL.Receive flow control is triggered when the number of free buffers in any enabled receive channel free buffer count register(RX n FREEBUFFER)is less than or equal to the receive channel flow control threshold register(RX n FLOWTHRESH)value.Receive flow control isindependent of receive QOS,except that both use the free buffer values.17.2.9.1.3.1Collision-Based Receive Buffer Flow ControlCollision-based receive buffer flow control provides a means of preventing frame reception when theEMAC is operating in half-duplex mode(the FULLDUPLEX bit is cleared in MACCONTROL).Whenreceive flow control is enabled and triggered,the EMAC generates collisions for received frames.The jam sequence transmitted is the12-byte sequence C3.C3.C3.C3.C3.C3.C3.C3.C3.C3.C3.C3h.The jamsequence begins no later than approximately as the source address starts to be received.Note that these forced collisions are not limited to a maximum of16consecutive collisions,and are independent of the normal back-off algorithm.Receive flow control does not depend on the value of the incoming frame destination address.A collision is generated for any incoming packet,regardless of the destination address,if any EMAC enabledchannel’s free buffer register value is less than or equal to the channel’s flow threshold value.17.2.9.1.3.2IEEE802.3x-Based Receive Buffer Flow ControlIEEE802.3x-based receive buffer flow control provides a means of preventing frame reception when the EMAC is operating in full-duplex mode(the FULLDUPLEX bit is set in MACCONTROL).When receive flow control is enabled and triggered,the EMAC transmits a pause frame to request that the sendingstation stop transmitting for the period indicated within the transmitted pause frame.The EMAC transmits a pause frame to the reserved multicast address at the first available opportunity (immediately if currently idle or following the completion of the frame currently being transmitted).Thepause frame contains the maximum possible value for the pause time(FFFFh).The EMAC counts the receive pause frame time(decrements FF00h to0)and retransmits an outgoing pause frame,if the count reaches0.When the flow control request is removed,the EMAC transmits a pause frame with a zeropause time to cancel the pause request.Note that transmitted pause frames are only a request to the other end station to stop transmitting.Frames that are received during the pause interval are received normally(provided the receive FIFO is not full).Pause frames are transmitted if enabled and triggered,regardless of whether or not the EMAC isobserving the pause time period from an incoming pause frame.The EMAC transmits pause frames as described below:•The48-bit reserved multicast destination address01.80.C2.00.00.01h.•The48-bit source address(set using the MACSRCADDRLO and MACSRCADDRHI registers).•The16-bit length/type field containing the value88.08h.•The16-bit pause opcode equal to00.01h.•The16-bit pause time value of FF.FFh.A pause-quantum is512bit-times.Pause frames sent to cancel a pause request have a pause time value of00.00h.•Zero padding to64-byte data length(EMAC transmits only64-byte pause frames).RegistersSPRUH79C–April 2013–Revised September 2016Submit Documentation Feedback EMAC/MDIO Module 17.3.2.2MDIO Control Register (CONTROL)The MDIO control register (CONTROL)is shown in Figure 17-26and described in Table 17-24.Figure 17-26.MDIO Control Register (CONTROL)313029282423212019181716IDLEENABLE Rsvd HIGHEST_USER_CHANNEL Reserved PREAMBLE FAULT FAULTENB ReservedR-1R/W-0R-0R-1R-0R/W-0R/W1C-0R/W-0R-0150CLKDIVR/W-FFhLEGEND:R/W =Read/Write;R =Read only;W1C =Write 1to clear (writing a 0has no effect);-n =value after reset Table 17-24.MDIO Control Register (CONTROL)Field DescriptionsBitField Value Description 31IDLEState machine IDLE status bit.0State machine is not in idle state.1State machine is in idle state.30ENABLEState machine enable control bit.If the MDIO state machine is active at the time it is disabled,it will complete the current operation before halting and setting the idle bit.0Disables the MDIO state machine.1Enable the MDIO state machine.29Reserved 0Reserved 28-24HIGHEST_USER_CHANNEL 0-1FhHighest user channel that is available in the module.It is currently set to 1.This implies that MDIOUserAccess1is the highest available user access channel.23-21Reserved 0Reserved 20PREAMBLE Preamble disable 0Standard MDIO preamble is used.1Disables this device from sending MDIO frame preambles.19FAULT Fault indicator.This bit is set to 1if the MDIO pins fail to read back what the deviceis driving onto them.This indicates a physical layer fault and the module statemachine is reset.Writing a 1to this bit clears this bit,writing a 0has no effect.No failure 1Physical layer fault;the MDIO state machine is reset.18FAULTENBFault detect enable.This bit has to be set to 1to enable the physical layer fault detection.0Disables the physical layer fault detection.1Enables the physical layer fault detection.17-16Reserved0Reserved 15-0CLKDIV 0-FFFFh Clock Divider bits.This field specifies the division ratio between the peripheral clockand the frequency of MDIO_CLK.MDIO_CLK is disabled when CLKDIV is cleared to0.MDIO_CLK frequency =peripheral clock frequency/(CLKDIV +1).。
MEMORY存储芯片PC28F512G18AE中文规格书

CPU writes 0to HINT bit No interrupt/Host writes 0 or 1to HINT bitCPU writes 0 or 1to HINT bit Host writes 0to HINT bitArchitectureSPRUH79C–April 2013–Revised September 2016Submit Documentation Feedback Host Port Interface (HPI)20.2.9.2HINT Bit:CPU-to-Host InterruptsThe HINT bit in HPIC allows the CPU to send an interrupt request to the host.The use of the HINT bit is summarized in Figure 20-16.Figure 20-16.CPU-to-Host Interrupt State DiagramIf the CPU writes 1to the HINT bit of HPIC,the HPI drives the UHPI_HINT signal low,indicating an interrupt condition to the host.Before the CPU can use the HINT bit generate a subsequent interrupt to host,the host must acknowledge the current interrupt by writing 1to the HINT bit.When the host does this,the HPI clears the HINT bit (HINT =0),and this drives the UHPI_HINT signal high.The CPU should read HPIC and make sure HINT =0before generating subsequent interrupts.Writes of 0have no effect.A hardware reset immediately clears the HINT bit and thus clears an active CPU-to-host interrupt.20.2.10EDMA Event SupportThe HPI does not provide synchronization events to the EDMA system.Memory accesses from the HPI are handled automatically,independent of the EDMA controller.The HPI controller has its own dedicated DMA and its operation and configuration are transparent.20.2.11Power ManagementThe HPI peripheral can be placed in reduced-power modes to conserve power during periods of low activity.The power management of the HPI peripheral is controlled by the processor Power and Sleep Controller (PSC).The PSC acts as a master controller for power management for all of the peripherals on the device.For detailed information on power management procedures using the PSC,see the Power and Sleep Controller (PSC)chapter.RegistersSPRUH79C–April 2013–Revised September 2016Submit Documentation FeedbackInter-Integrated Circuit (I2C)Module 21.3.6I2C Data Receive Register (ICDRR)The I2C data receive register (ICDRR)is used to read the receive data.The ICDRR can receive a data value of up to 8bits;data values with fewer than 8bits are right-aligned in the D bits and the remaining D bits are undefined.The number of data bits is selected by the bit count bits (BC)of ICMDR.The I2C receive shift register (ICRSR)shifts in the received data from the I2Cx_SDA pin.Once data is complete,the I2C copies the contents of ICRSR into ICDRR.The CPU and the EDMA controller cannot access ICRSR.ICDRR is shown in Figure 21-19and described in Table 21-11.Figure 21-19.I2C Data Receive Register (ICDRR)3116ReservedR-015870ReservedD R-0R-0LEGEND:R =Read only;-n =value after reset Table 21-11.I2C Data Receive Register (ICDRR)Field DescriptionsBitField Value Description 31-8Reserved 0These reserved bit locations are always read as zeros.A value written to this field has no effect.7-0D 0-FFh Receive data.。