ZAE齿轮电机
意大利Zapei驱动器ACE2行走电机驱动器说明书(48V350A)
MAZAK-车床维修手册

汽车制造业
MAZAK车床广泛应用于 汽车零部件的加工和制 造,如发动机、底盘等。
机械制造业
MAZAK车床适用于各种 机械零件的加工,如轴
承、齿轮等。
航空航天业
由于MAZAK车床的高精 度和高稳定性,也被广 泛应用于航空航天领域
的零件加工。
其他领域
除上述领域外,MAZAK 车床还广泛应用于电子、 医疗器械、能源等领域。
丝杠精度调整
根据需要调整丝杠的精度,以确保加 工零件的位置精度。
传动皮带更换
定期更换传动皮带,确保进给系统的 稳定性。
润滑系统维修
油路清洁
定期清洗油路,确保润滑油流通顺畅。
油泵检查
检查油泵的工作状态,如发现异常应及时 修复或更换。
油位检查与补充
油质检测与更换
定期检查润滑油油位,如需补充应及时添 加。
MAZAK车床维修手册
目录 CONTENT
• MAZAK车床简介 • MAZAK车床维修基础知识 • MAZAK车床机械系统维修 • MAZAK车床电气系统维修 • MAZAK车床维修实例分析 • MAZAK车床维护与保养建议
01
MAZAK车床简介
MAZAK车床的历史与发展
1920年代初,日本开始 研制车床,MAZAK作为 早期的车床制造商之一, 开始涉足车床领域。
预防措施
定期对车床进行电气检查和维护,确保电气元件的稳定性和可靠性。
系统参数调整维修实例
故障现象
车床在加工过程中出现明显的误差,加工精度不达标。
故障原因
系统参数设置不正确或被修改。
维修方法
检查系统参数的设置情况,调整相关参数以恢复精度,确 保参数设置正确无误。
预防措施
zaj一3型电动执行器原理
zaj一3型电动执行器原理
ZAJ-13型电动执行器是一种常用的电动执行器,它采用了电动
机作为驱动力,通过传动装置将电动机的旋转运动转化为线性运动,从而实现对执行器的控制。
该型号的电动执行器主要由电动机、传动装置、限位开关和控
制电路等组成。
电动机是执行器的核心部件,它通过电能转化为机
械能,提供动力。
传动装置通常采用螺杆传动或齿轮传动,将电动
机的旋转运动转换为线性运动,推动执行器的活塞或阀门进行开关
或调节。
在工作过程中,通过控制电路对电动机进行控制,可以实现执
行器的开启、关闭或调节。
同时,限位开关起到了保护作用,当执
行器达到预设的开启或关闭位置时,限位开关会自动触发,停止电
动机的运动,避免过度运行或损坏。
总的来说,ZAJ-13型电动执行器利用电动机和传动装置将电能
转化为机械能,通过控制电路实现对执行器的控制,配合限位开关
进行位置的检测和保护。
这样,它可以广泛应用于各种需要线性运
动控制的场合,如阀门控制、门窗控制等。
manual_伺服电机手册2(中文)
伺服放大器
DOCOM DICOM
DC24V
伺服放大器
DOCOM DICOM
DC24V
控制输出
信号
RA
控制输出
信号
RA
(3) 试运行和调试
注意
在操作之前,请检查参数设置。不正确的设置可能导致部分机器执行不可预知的操作。 不能过度改变参数设置。操作将不稳定。
(4) 使用
注意
提供外部紧急停止电路确保能够立即停止操作并切断电源。 必须由合格的技术工程师进行拆卸作业以及维修工作。 在报警复位前,确保输入到伺服放大器的运行信号为断开以防止事故。如果运行信号接通时报警复位将发生 突然再起动。 不要改装设备。 采用噪声滤波器等使电磁干扰的影响最小化,电磁干扰可能由伺服放大器附近的电子设备引起。 使用带指定伺服电机的伺服放大器。 伺服电机上的电磁制动用于保持伺服电机轴,不能用于一般制动。 对于服务寿命和机械结构(如丝杠和伺服电机通过定时带 连接)等原因, 电磁制动可能不保持伺服电机轴。 为了确保安全,在机器侧安装停止装置。
在紧急(强制)停止期间电 路必须为断开。
伺服电机
RA EMG 24VDC
电磁制动器
出现任何报警时,排除原因,确保安全,在重新起动操作之前不能激活报警。 当瞬时电源中断后恢复电源时远离机器,因为机器可能突然起动(机器设计时考虑如果重新起动时保证安全)。
(6) 维护,检查和部件更换
注意
伺服放大器的电解电容将会老化。为防止由于故障而产生的二次事故,建议在用于一般环境中时,电解电容 每 10 年更换一次。 请咨询我们的销售代表。
2. 防止火灾
注意
不要将伺服放大器、伺服电机以及再生电阻安装在易燃物质上或靠近易燃物质。否则,可能导致火灾。 当伺服放大器发生故障时,切断主伺服放大器侧的电源。持续的大电流可能导致火灾。 当使用再生电阻时,如果出现错误的信号,切断主电源。否则,再生电阻故障或类似故障可能使再生制动电 阻过热,导致火灾。
ZAE
ZAE减速机、ZAE变速箱、ZAE齿轮电机、ZAE齿轮马达、ZAE齿轮变速箱、ZAE角度变速箱、ZAE伺服减速机
上海智川工贸有限公司优势供应德国ZAE减速机、ZAE变速箱、ZAE齿轮电机、ZAE 齿轮马达、ZAE齿轮变速箱、ZAE角度变速箱、ZAE伺服减速机。
德国ZAE-AntriebsSysteme GmbH & Co KG公司产品简介:
1.ZAE特殊设计组件:根据您的严格要求,我们设计制造出能满足您需求的蜗轮传动产品。
2.ZAE蜗轮减速箱:12个标准比率从5:1到83:1, 轴间距为40到315mm, 可承受扭矩高达27,700Nm。
3.ZAE伺服减速机:四种不同的尺寸,ZAE减速机,ZAE减速电机,ZAE伺服减速机,ZAE减速箱,减速比率可由5到40,非常安静的设计,带有紧急脱开系统。
4.ZAE斜齿轮组件:模数m=0.5 ~6,外径达5~320Nm,工件长度最大可达1, 00mm,齿宽可达200mm。
5.ZAE蜗轮蜗杆组件:输出扭矩高达27, 700Nm,轴间距可由30到400mm,且可根据客户需要设计相应的减速比。
德国ZAE减速机,ZAE减速机,ZAE减速机报价,ZAE蜗轮蜗杆,ZAE 蜗轮蜗杆减速机,ZAE齿轮减速机,ZAE减速电机,ZAE伺服减速机,ZAE减速箱,ZAE蜗轮减速箱,ZAE锥齿轮换向器,ZAE斜齿轮组件,ZAE蜗轮蜗杆组件,ZAE特殊设计组件
6.ZAE锥齿轮换向器:6种尺寸,4种标准比率,也可根据您的要求设计制作您所需要的变速比,输出扭矩最高可达2, 400Nm。
7.ZAE减速电机:多种形式的齿轮传动,功率可有0.09kw到75kw,转速为0.2到500rpm,最大输出扭矩则可达27, 000Nm。
西玛NR133XD型潜水电机使用说明书

NR133XD SAFETY PRECAUTIONSFor the best results with submersible motors, read this manualand all of the warning sign attached to the motor carefully beforeinstalling and operating it, or maintaining and testing it, andfollow the instructions exactly.In this manual, the rank of cautions is distinguished as WARNINGand CAUTION.Indicates a potentially hazardous situationmay happen, which, if not avoided, can resultin death or serious injury.Indicates a potentially hazardous situationmay happen, which, if not avoided, can resultin injury or damage of product.users for quick reference.This motor is intended for installation bytechnically qualified personnel.Verify motor is filled with clean water beforeinstalling. The warranty is void if this is not done.This motor and lead assembly are designedonly for use submerged in water.lead wires should be protected during storage, handling,moving and installation of the motor.2) I nspect the motor to determine that it is the correct HP, voltageand size for the job and that there is no shipping damage.3) T he factory-installed water in the motor is supplied withPropylene Glycol capable of temperatures to -30°C(-22°F).Do not install, transport or store below these temperatures. Ifstorage is necessary below these temperatures, drain the waterfrom the motor.4) A fter long periods of idleness and on all new installations, checkthe electrical resistance and megger the motor with lead wiresconnected: see table A. Prior to installation, the motor should havean insulation value of at least 50 megohms. After installation,motor and power cable should have a minimum insulation valueof 1 megohm. If minimum values are not obtained, contact factory.5) C heck the tightness of drain plugs, mounting bolts and cableconnections.6) D o not hammer the shaft, coupling or slinger since this maydamage the thrust bearing. Check the rotation of the shaft byhand to insure that it turns freely.7) D o not drop the bottom end of the motor in the dirt or mudsince this may plug up the diaphragm opening.8) I f motor is to be installed in a horizontal position, make surethat the lead wires are at the 12 o'clock position when facingthe motor shaft (in horizontal position).TROUBLE SHOOTING OF SUBMERSIBLE MOTORS1) Motor does not start.• No power supply.→ Check for loose or corroded connectionsand motor lead terminals.• Defective connections. → Correct connections.2) Fuses or relay blow when motor starts.• Incorrect voltage. → Apply correct voltage (Nameplate).• Incorrect fuses or relay.→ Replace with proper fuses and relay.• Defective capacitors. → Replace with proper capacitors.• Wrong connections. → Correct wrong connections or shortcircuit.• Locked rotor conditions. →Correct pump or well conditions.• Insulation resistance down. →Check the line and correct.3) Motor runs for a while and then blown fuses or relay.• Low voltage or high voltage. → Apply rated voltage.• Defective capacitors. → Replace with proper capacitors.• Different control box for the motor. → Replace with propercontrol box.• Defective starting voltage relay. → Replace with proper relay.• Pump is sand clogged. → Pull pump and clean well.• Overheated protector. → Shield the control box from heatsource.The following conditions are stated to provide the owner with a listof criteria for maximum motor life and to assure motor warranty.PRE-INSTALLATION1) Maximum water temperature:A) 35°C( 95°F): 6" (5 40HP) motors.B) 25°C( 77°F): 6" (50,60HP), 8", 10", 12" and 14" motors.2) PH content of the water between: 6.5 -83) Maximum chlorine content: 500 PPMMaximum Sulfuric acid iron content: 15 PPMMaximum Fluorine content: 0.8 PPMMaximum Electric conductivity: 118 μMHO/INCH4) Maximum sand content: 50 PPM5) Proper approved three-phase overload protection. See TABLE B.6) Proper fusing for motor circuit protection. See TABLE C.7) Proper line voltage variation during running conditions:60Hz: 460V, 230V ±10% , 50Hz: 380V ±10%at motor lead terminal.(voltage drop of cable should be considered by user.)Combination of voltage and frequency variation: ±10%(sum of absolute values of voltage and frequency)Current unbalance between legs should not exceed 5% of theaverage.8) Proper sizing of motor HP. (current, thrust, voltage, etc.)9) Motor must be set with minimum 10 feet clearance from thebottom of the well.H I TACH I SUBMERS I BLE MOTORSF1Date: 03/22/16Supersedes: 09/01/0710) In the case of horizontal installation, the motor is to be rigidlyaligned with the pump and firmly mounted to prevent any load on the shaft and bearings and to avoid any damaging vibrations to the motor.11) The motor must always be immersed in water so that a flowvelocity of cooling water at a rate of 0.5 feet per second flows past any and all parts of the motor. The motor will not operate in mud or sand.12) Hitachi motor leads are sized for operation while submergedin water at the maximum rated ambient water temperature.The factory motor leads must be fully submerged at all times during operation to avoid damage or failure.13) The power cables shall be sized large enough so that at ratedcurrent there will be less than a 5% voltage drop. See TABLEC. Cables must be waterproof submersible type.14) For three-phase motors a balanced and properly sizedtransformer bank shall be provided. Improper electrical supply (for example, phase converter, V-connection transformer, etc.) or connections will void the warranty.15) Single-phase protection is recommended for protection of theinstallation. Any failure due to single phasing of the incoming voltage causing the motor to fail will void the warranty.16) Surge suppressors are recommended in the interest ofprotecting the control panel, as well as the insulation system of the motor. Any motor failure due to lightning or other natural disasters will void the warranty.17) Provide waterproof insulation splices between all lead wiresand well cables.18) In the event that a reduced voltage starter is used to start themotor, the following should be verified:A. Correct quick trip, class 10 or better, ambient compensatedoverloads are incorporated.B. Proper short circuit protection is utilized.C. The torque required by the motor and pump package isattainable by this type starter.D. The lead arrangement of the motor is acceptable with theproposed starter load connections.E. Verify that if any time delay relays are used in switchingcontactors in and out, that the time settings do not exceed 2 seconds; this could damage the motor.F. If a manual auto-transformer starter is used, voltage shouldbe minimum 60% of rated voltage, and switched to "Run"condition within 2 seconds. Double check TABLE B and C for correct protection.19) Single-Phase Motors (5-15HP)Proper connections and correct capacitors and relays are necessary for single-phase motor starting and running.Connection diagram: See Fig. 1.Performance and recommendable capacitors: See TABLE D.20) VFD (Inverter)Please contact Hitachi for VFD(inverter) usage on Hitachi Submersible MotorsMAINTENANCEThere are no bearings that need oil or grease. The motor, being inaccessible, should be monitored through its electrical connections.1) Measure and record operating current and voltage.2) Measure and record the motor insulation resistance. Anyresistance of less than 50 megohm for a new motor should be evaluated or checked further by a qualified service shop.3) Lightning arrestors and/or surge capacitors will help preventdamage to the control box, cables, and motor.4) Single-phase protection will help in preventing motor failuredue to adverse incoming primary power.5) Based on the values obtained in A and B above and the outputflow rates and pressures of the pump, a complete picture of total performance can be obtained. This can be used to determine any pump and motor maintenance and overhauling which might be required.6) If the motor is to be stored, protect the unit from freezing bystoring in an area with a temperature higher that -30°C(-22° F). OPERATION1) After energizing the motor, check the flow and pressure of thepump to make sure that the motor is rotating in the correct direction. To correct a wrong rotation, switch any two of the three cable connections. (Three-phase motor only)2) When starting the pump for the first time, inspect the waterfor sand. If sand appears, then continue to pump till the water clears up; otherwise, sand will accumulate in the pump stages and will bind or freeze the moving parts if water is allowed to flow back down the well.3) During testing or checking rotation (such as "bumping" or "inching")the number of "starts" should be limited to 3, followed by a full15 minutes cooling-off period before any additional "starts" areattempted. Depending on the depth of the well and/or method of checking, these rotational checks or "starts" may actually be full-fledged starts. If this is the case, then a full cooling-off period of 15minutes is required between this type of start.4) For automatic (pilot device) operation, the motor should beallowed to cool for 15 minutes between starts.5) Input voltage, current and insulation resistance values shouldbe recorded throughout the life of the installation and should be used as a from of preventive maintenance.TABLE A. RESISTANCE DATASingle Phase 2 Pole 230V/60HzMOTORSIZE & TYPEHPRESISTANCE ( )R Y B Y R B6”, C5 2.1430.482 2.597”7.5 1.3720.371 1.715”10 1.0220.286 1.280”150.6480.2000.821Three Phase 2 Pole Three Phase 4 PoleMOTORSIZE & TYPEHP VOLTRESISTANCE( )MOTORSIZE & TYPEHP VOLTRESISTANCE( ) 6”, C52300.7768”, W7.52300.564”5460 3.021”7.5460 2.178”7.52300.621”102300.564”7.5460 2.400”10460 2.178”102300.418”152300.399”10460 1.590”15460 1.519”152300.282”202300.399”15460 1.044”20460 1.519”202300.229”252300.242”204600.832”254600.888”252300.180”302300.242”254600.636”304600.888”302300.14710”, W404600.408”304600.530”50”0.408”404600.358”60”0.288”50”0.308”75”0.257”60”0.308”100”0.1718" , C40”0.278”125”0.171”50”0.20212”, W150”0.138”60”0.202”175”0.1198”, W40”0.372”200”0.0826”50”0.33114”, W250”0.0552”60”0.278”300”0.0517”75”0.218Values are for normal temp.68°F (20 ) andwith motor lead wires resistance.LEAD WIRE COLORR: Red , Y: Yellow, B: Black , G: Green (6"C , 8"C)MOTOR TYPEC : CANNED , W : WATER TIGHT”100”0.164”125”0.132”150”0.11510”, W175”0.121”200”0.0929”250”0.077612”, W300”0.0386TABLE B. SELECTION TABLE OF OVERLOAD PROTECTION TABLE C. FUSE AND COPPER CONDUCTIOR CABLEPhaseMOTORSize & TypePoleHP V olts HzAMPSOverloadProtection FUSECopper Cable Size from Control Box to MOTOR (FEET)Conductor Size AWG,MCM COND.TEMP 80 RatedAMPSS.F=1.15AMPSSTARTERSizeHEATER CODE(FurnasP.)STDSizeDual-ElementSize121086420000000000250300350400500600Three Phase6”, C2Pole52306015171K58453024038061097015002380460607.58.50K43251596015202420380509 0K493017.56701060167026907.52306022261K6470401602604106501010161024304606011131K5435206601050167026603805013 1K554025450710113018002790102306029331-3/4K689060200320500780124018804606014.516.51K584530490780125019903805017 1K58603034054085013602110152306042462K74150802103405308401270159020204606021231-3/4K637040340540860137021203805025 1-3/4K64804536058092014302260202306054602-1/2K771751002604006409701220155019404606027302K6790504106501040162025703805032 2K6910060280440710109017402620252306068763K832251253305207809801240156018004606034382K7211060530840130020603805041 2K731258035055086013702060302306082943K862501504306508101030130014901790 4606041472-1/2K74125804306901070170025703805048 2-1/2K7515090300480740117017702220404606053603K76175100520810129019403805062 3K76200125360560890135017002150504606070793K832251256501030156019603805083 3K852501504406901040131016602090604606082943-1/2K862501508501290161020508”, C2Pole404606054613K76175100520810128019303805064 3K77200125360550870132016602100504606067753K782251256701060160020103805078 3K852501504507101070135017102150604606079893-1/2K862501508601310164020803805094 3-1/2K8730017559088011101410177020408”, W2Pole404606056633K76175100520810128019303805065 3K77200125360550870132016602100504606065733K782001256701060160020103805078 3K852501504507101070135017102150604606080903-1/2K862501508601310164020803805095 3-1/2K873001755908801110141017702040 7546060961093-1/2K88300175710108013601720216038050115 4K893502254807309101160146016802010 100460601271454K92400225810102013001630188038050152 4-1/2K265003005506908701100127015101760 125460601611804-1/2K285003008201040131015101800 38050192 4-1/2K2860035070088010201220142016202030 150460601972204-1/2K316003501090125015001750 38050235 5K327004507408501010118013501690203010”, W2Pole175460602052305K317004009501090130015201740 38050261 6K23800500700840970111013901670 200460602352705K338004501130132015101889 38050295 6K24900600870100012501500 250460602953406K27900600121015101810 38050370 6K2812006509901190 12”, W2Pole300460603503966K29120065012701520 38050420 6K31130075010508”, W4Pole7.52306026291-3/4K6880502704206701050166025104606013141K564025670106016902700102306032361-3/4K7010060200310500770123018504606016181K60503049078012501990152306046522-1/2K75150903405208301250157019904606023261-3/4K64704533053084013402080202306058662-1/2K771751102503906109301160148018604606029332K699060390620100015402450252306076863K852501503205107709701230154017804606038432K7312570520830128020403023060881003K873001754206408001010127014701760 4606044502-1/2K751508043068010601680254010”, W4Pole404606062713K77200110830131019802490504606073833K832251506701060159020006046060911043-1/2K8730017589013501690215075460601061213-1/2K893502001090137017402190100460601451664-1/2K2645030010201300164018802250125460601752004-1/2K296003501030130014901790208012”, W4Pole150460601902184-1/2K2960035011001270151017602020175460602202505K3270040011001310153017502190 200460602552936K248004501150133015301910 14”, W4Pole250460603053506K271000600123015401850 300460603704256K2912006501550Single Phase 6”, C2Pole5230602427.5804519030047073011707.52306036411107019030047075011301023060505817590220340550830104015230607285225150240380570720920Recommended Adjustable Overload RelaysSiemens : Class/Type 3UA5,3UA6,3UA7Furnas : Class/Type US/15 48AG,UA/15 48BGTABLE D. PERFORMANCE DATA OF SINGLE-PHASE SUBMERSIBLE MOTOR2P FOR 6” DEEP WELLOutput(HP)57.51015V oltage-Frequency 230V60Hz230V60Hz230V60Hz230V60HzNo Load Current (A)8.88.312.016.1No Load Loss(W)1184142815442050L o a d C h a r a c t e r i s t i c sLoad(%) 25 50 75 100 125 25 50 75 100 125 25 50 75 100 125 25 50 75 100 125Current (A) 11.5 14.6 18.9 23.8 30.2 13.6 19.5 26.7 35.2 45.6 18.0 25.5 35.5 48.0 59.0 25.5 38.1 52.7 70.8 96.8Ef fi ciency (%) 47.8 66.2 72.2 74.8 72.8 51.1 67.6 72.5 72.9 70.8 54.0 67.8 73.1 73.6 71.5 57.5 70.8 74.7 73.7 69.2Power Factor (%) 73.5 84.0 89.0 91.2 92.3 87.8 92.5 94.5 94.9 94.2 81.8 88.9 91.8 93.2 93.7 82.9 90.2 92.7 93.2 90.8Slip(%) 0.8 1.5 2.2 3.0 4.2 0.8 1.8 2.9 4.2 5.8 0.7 1.7 2.8 4.1 5.6 1.0 2.1 3.3 4.9 7.3Full Load Torque (ft ∙lbs)7.5311.4215.2323Break Down Torque (ft ∙lbs)15.522.027.445Locked Rotor Torque (ft ∙lbs)12.518.321.334Locked Rotor Current (A)124167202275Locked Rotor Code GF E D Rated Input (W)498776751013515180Current of SF 1.15(A)27.5415885Input of SF 1.15(W)573589501183018050Spec. of Running Capacitor 440V AC 440V AC440V AC 440V AC 30μFD 40μFD 50μFD 70μFD Spec. of Starting Capacitor330V AC 330V AC 370V AC 370V AC 200μFD250μFD350μFD450μFDCatalog No. SM-E 186-03R SM-E 186-03R Printed in Japan HF-N(B)。
电机选型手册(通用型最新版)

ϕD
=
2·i
[N·m]
③
FA m
◇金属线 · 皮带驱动、齿条 · 齿轮式驱动
TL
=
F 2π ·
η
·
π
· i
D
=
F 2·
η· D· i[N·m]
④
F = FA + m · g(sin θ + μ · cos θ )[N]
⑤
◇ 根据实测的方法
TL
=
FB · 2
D[N·m]
⑥
FA
m
F
ϕD
FA
m
F
ϕD
弹簧秤
■电动机选用计算公式
说明脉冲信号控制步进电动机及AC伺服电动机时必备的计算式。
●运行模式
作为脉冲速度的运行模式,步进电动机通常是选定左边的加减速运行模
式,运行速度低速、负载转动惯量小时,可以采取右图的自起动运行。
脉冲频率 f2
脉冲频率 f2
A f1
t1
t1
t0
加减速运行
A
t0 自起动运行
f1:起动脉冲频率[Hz] f2:运行脉冲频率[Hz] A:工作脉冲数 t0:定位时间[s] t1:加减速时间[s]
+
B2)[kg·m2]
⑫
Jy =
1 12
m(B2
+
C2)=
1 12
ρ · A · B · C(B2 + C2)[kg·m2]
⑬
◇ 直线运动物体的转动惯量
J=
m(
A 2π
)2[kg·m2]
⑭
A:单位移动量[m/rev]
由减速机介入传导时,电动机轴负载转动惯量的换算公式
FANUC PMC信号地址汇总表

G035#7 G036#0~ G037#3 G037#5 G037#6 G037#7 G038#2 G038#3 G038#6 G038#7 G039#0~#5 G039#6 G039#7 G040#5 G040#6 G040#7 G041#0~#3 G041#4~#7 G042#0~#3 G042#7 G043#0~#2 G043#5 G043#7 G044#0, G045 G044#1 G046#1 G046#3~#6 G046#7 G047#0~#6 G047#0~ G048#0 G048#5 G048#6 G048#7 G019#0~ G050#1
○○
ROV1,ROV2
○○
F1D
-○
HS1A~HS1D
○○
HS2A~HS2D
○○
HS3A~HS3D
○○
MP1,MP2
○○
RT
○○
NOINPS
○○
EPNO~EPN13
○○
EPNS SWS1 SWS2 SWS3 *SSTP1 *SSTP2 *SSTP3 CON GR1,GR2 *SUCPF *SCPF SPSTP PC2SLC GR21 SAR SOR *SSTP SOV0~SOV7
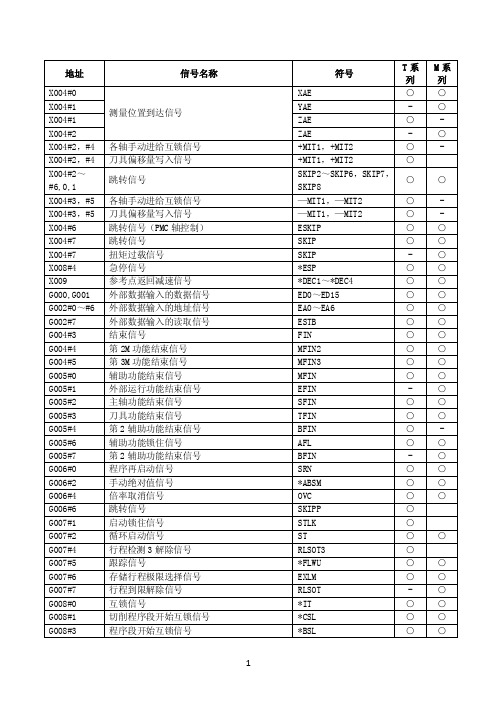
测量位置到达信号
各轴手动进给互锁信号 刀具偏移量写入信号
跳转信号
各轴手动进给互锁信号 刀具偏移量写入信号 跳转信号(PMC 轴控制) 跳转信号 扭矩过载信号 急停信号 参考点返回减速信号 外部数据输入的数据信号 外部数据输入的地址信号 外部数据输入的读取信号 结束信号 第 2M 功能结束信号 第 3M 功能结束信号 辅助功能结束信号 外部运行功能结束信号 主轴功能结束信号 刀具功能结束信号 第 2 辅助功能结束信号 辅助功能锁住信号 第 2 辅助功能结束信号 程序再启动信号 手动绝对值信号 倍率取消信号 跳转信号 启动锁住信号 循环启动信号 行程检测 3 解除信号 跟踪信号 存储行程极限选择信号 行程到限解除信号 互锁信号 切削程序段开始互锁信号
FANUC信号地址表
YAE
-
○
ZAE
○
-
ZAE
-
○
+MIT1,+MIT2
○
-
+MIT1,+MIT2
○
SKIP2~SKIP6,SKIP7, SKIP8
○
○
—MIT1,—MIT2
○
-
—MIT1,—MIT2
○
-
ESKIP
○○
SKIP
○○
SKIP
-
○
*ESP
○○
*DEC1~*DEC4
○○
ED0~ED15
测量位置到达信号
各轴手动进给互锁信号 刀具偏移量写入信号
跳转信号
各轴手动进给互锁信号 刀具偏移量写入信号 跳转信号(PMC 轴控制) 跳转信号 扭矩过载信号 急停信号 参考点返回减速信号 外部数据输入的数据信号 外部数据输入的地址信号 外部数据输入的读取信号 结束信号 第 2M 功能结束信号 第 3M 功能结束信号 辅助功能结束信号 外部运行功能结束信号 主轴功能结束信号 刀具功能结束信号 第 2 辅助功能结束信号 辅助功能锁住信号 第 2 辅助功能结束信号 程序再启动信号 手动绝对值信号 倍率取消信号 跳转信号 启动锁住信号 循环启动信号 行程检测 3 解除信号 跟踪信号 存储行程极限选择信号 行程到限解除信号 互锁信号 切削程序段开始互锁信号 程序段开始互锁信号
主轴电机指令输出极性选择信号
PMC 控制主轴速度输出控制信号
2
符号
T系 M系 列列
*ESP
○○
*SP
○○
RRW
○○
ERS
○○
PN1,PN2,PN4,PN8, ○
关于PLC的自动旋转门的设计
摘要在现代工业生产和经济生活中,随着电子技术的发展、计算机技术和现代控制理论的发展,各种自动化控制系统已广泛应用各个领域,PLC控制是最为常见的一种,也标志了自动控制领域成为了数字化时代的一员。
PLC系统具有实时性、可靠性高、简单灵活、多样的I/O卡件、控制系统采用模块式结构、价格优势、安装简单,维修方便、体积小,能耗低等优点。
它更让人类懂得数字时代的发展将改善人类的生活。
本课题研究的是自动旋转门PLC控制。
自动旋转门系统由PLC、传感器、变频器组成。
自动旋转门主要由PLC负责完成控制,变频器完成对三相异步电动机的驱动。
由于是由电机提供动力系统,所以安全问题被放到重要位置。
采用微波传感器扫描正常位置是否有人经过,及安全传感器感应危险处,以执行正确的命令和安全措施。
关键词:自动旋转门、PLC、传感器、变频器目录1.绪论..............................................................1.1旋转门的课题背景...........................................1.2国内外旋转门发展状况.........................................1.2.1国外旋转门发展状况........................................1.2.2国内旋转门发展状况.........................................2.方案的确定................................................2.1方案一的设计.............................................2.2方案二的设计................................................2.3方案选择.......................................................3.门机构的设计.................................................3.1门结构材料的选用..............................................3.2门结构尺寸的确定.............................................3.3中间轴的设计与轴承的选用.......................................3.4曲臂部分设计...............................................3.5华盖的设计...................................................4.驱动系统设计...................................................4.1轴与轴承设计计算............................................4.1.轴的尺寸设计................................................4.1.2轴承的选择与验算...........................................4.2轴的校核...................................................4.3电机的确定......................................................4.3.1确定各扇门的质量............................................4.3.2各部分转动惯量的计算.......................................4.3.3惯性力矩的计算............................................4.3.4电机的确定................................................4.4齿轮的设计计算..............................................4.4.1选定齿轮类型精定等级材料齿数..................................4.4.2按直面接触强度设计..........................................4.4.3按齿根弯曲强度设计.........................................4.4.4几何尺寸计算.............................................5.控制系统设计.....................................................5.1.1变频器容量选择计算....................................5.1.2传感器与安全系统的设计...................................5.1.3控制系统功能的特点.....................................5.1.4控制系统驱动控制原理.....................................5.1.5plc系统控制分析及地址分配设计..............................5.2软件设计..............................................5.2.1plc控制系统程序设计......................................5.2.2plc梯形图............................................5.2.3指令程序................................................结论......................................................参考文献..............................................附录A指令程序表...............................................致谢..........................................................1 绪论1.1旋转门的课题背景自动旋转门是楼宇设备中的光机电一体化技术产品,它给人以亲切大方的感觉,同时营造出奢华的气氛,其全新的概念,宽敞的开放门面和高格调的设计,堪称建筑物的点睛之笔,立足于建筑时代大潮的最前端。
工业厂牌资料收集

工业厂牌资料收集电机马达:WEG电机| PARKER电机| Denison电机| 德国麦尔电机| mayr | A&G | ElectroCraft电机| T-T Electric电机| LEORY-SOMER电机| Bodine电机| STOEGRA步进电机| ABB电机| LOHER | ELEKTRA电机| LONNE电机| INVICTA振动电机| LEROY-SOMER电机| EMOD电机| Danfoss Bauer电机液压泵阀类: PARKER | BOSCH REXROTH | HYDRO LEDUC | EUGEN SEITZ | EUGEN SEITZ电磁阀| HAWE压力阀| HAWE柱塞泵| BUCHER | ZUWA | VICKERS | KRACHT | KRACHT齿轮泵| BUCHER HYDRAULICS | 力士乐泵| 力士乐| REXROTH | BOSCH | WOERNER | HAWE | OilGear | HYDAC过滤器| ARIS | HYDRO-LEDUC液压马达| KROMBACH | MIDLAND-ACS气控阀| HAWE换向阀| BRINKMANN编码器: KUBLER | TWK编码器| LEINELINDE | IMG | BAUMER HUBNER | HUBNER编码器| HUBNER BERLIN | BEI编码器| AMCI编码器| LEINE&LINDE | 德国TR | HUBNER-BERLIN | BAUMER传感器: WEBER传感器| TWK传感器| TME电子元件| KELLER | Eltrotec | ENRAF | BAUMER传感器| BALLUFF | ALTHEN | MTS | KAMAN | WEKA | GEFRAN | 帝尔传感器液位流量仪表: WEKA液位计| 麦格纳丘液位开关| E+H流量计| NORTEK液位计| MAGNETROL液位计| MAGNETROL流量计| LITRE METER流量计| KROHNE | KELCO流量计| CONTOIL流量计| ENRAF液位计| BAMO流量计| 英国MIDLAND-ACS | MIDLAND-ACS执行器| KRACHT齿轮流量计| ELETTA流量开关| VSE流量计| MAGNETROL | KRACHT流量计| hydrotechnik流量计| ENRAF流量计离合器_减速机: ZF减速机| Spinea减速机| MAYR离合器| A&G减速机| TRAMEC减速机| WARNER离合器| COREMO刹车离合器| COREMO | ZAE 减速机| BREVINI减速机快速接头: MULTI CONTACT连接器| LEGRIS气动接头| Gromelle快速接头| MULTI-CONTACT | STAUBLI | KRAUS&NAIMER开关| TURIAN制动夹紧装置: ZIMM | mayr夹紧装置| LEINKNECHT安全装置| Rietschoten制动器| STROMAG制动器| SITEMA换热冷却设备: OESSE风机| EBM-PAPST风机| ELEKTROR风机| 德国Aerzen风机| 日本OHM ELECTRIC | OHM ELECTRIC冷却器| OHM ELECTRIC | HS COOLER | 海洛斯加热器| COSMOTEC过滤风扇| OILTECH | UNIVERSAL HYDRAULIK | HS-COOLER | FUNKE | COSMOTEC | 西班牙CHAYSOL风机| BOWMAN | ACOVENT | EATA冷却器高低压电气: AUTOMA限位开关| ZIMMER继电器| SADTEM | ROPEX | CELDUC | Alpha Wire | TRAMAG变压器| Eaton变频器| 施耐德电气| SADTEM | NORD变频器| KALEJA继电器| I.R.T.变频器| ISMET变压器| TRAFAG压力开关进口工具: ITH扭矩工具| BOSCH | ATLAS COPCO气动工具| FLEX-现货供应| FLEX工具| FLEX抛光机| FLEX打磨机其他备件: EWS刀座| EWS刀塔| STAHL | MAHLE | UNION SPECIAL | Sheffer | SIEBERT显示器| OLAER蓄能器| KINETROL气缸| INVICTA振动器。
臻兴阿米四头ogs精雕机介绍
客户评价与反馈
评价一
臻兴阿米四头ogs精雕机操作简便,加工精度高,大 大提高了生产效率。
评价二
该设备稳定可靠,故障率低,维护成本低,是企业的 好帮手。
评价三
臻兴阿米四头ogs精雕机的服务团队专业、周到,为 我们提供了全方位的技术支持和售后服务。
实际应用效果展示
加工效率提升
使用臻兴阿米四头ogs精 雕机后,企业的加工效率 得到了显著提升,生产周 期大幅缩短。
产品特点
多轴联动
支持四轴联动,可实现 复杂工件的快速加工。
自动化程度高
配备自动上下料系统, 减轻工人劳动强度,提
高生产效率。
易于操作
人性化的操作界面和菜 单设计,方便用户快速
上手。
产品应用领域
01
02
03
精密模具制造
适用于各种精密模具的加 工,如注塑模、压铸模等。
抗干扰能力
该精雕机具备强大的抗干扰能力,能够有效避免外部因素对加工精度的影响, 保证了加工质量的稳定性。
易于操作和维护
人性化操作界面
臻兴阿米四头ogs精雕机采用直观的人性化操作界面,使得操作变得更加简单方 便,降低了操作难度。
便捷的维护
该精雕机在设计时充分考虑了维护的便捷性,各部件的拆装和更换都非常简单, 降低了维护成本和时间成本。
臻兴阿米四头ogs精雕机 介绍
• 产品概述 • 技术规格 • 优势与性能 • 客户案例与评价 • 结论与展望
01
产品概述
产品简介
臻兴阿米四头ogs精雕机是一款 高效、高精度的数控机床,专为 加工小型、复杂的工件而设计。
该机床采用先进的精雕技术,能 够在保证加工质量的同时,大幅
提高加工效率。
电机参数
4 0.6
2 0.3
0
0
0
0 (0)
驱动器输入电流
fs 500
1000 转速 [r/min]
2
4
(4)
(8)
脉冲频率 [kHz]
1500
2000 6 分割数 1 (12() 分割数 2)
0
0
0
fs
500
1000
1500
2000
2500
转速 [r/min]
0
2
4
6
8 分割数 1
(0)
(4)
(8)
(12)
(16() 分割数 2)
脉冲频率 [kHz]
CMK256AP/CMK256BP
电源电压:DC24V 设定电流:2.0A/相(2 相励磁时) 带制振器 D6CL-6.3F:JL=140×10–7kg·m2 0.8
系统构成
种类
规格·特性
外形图
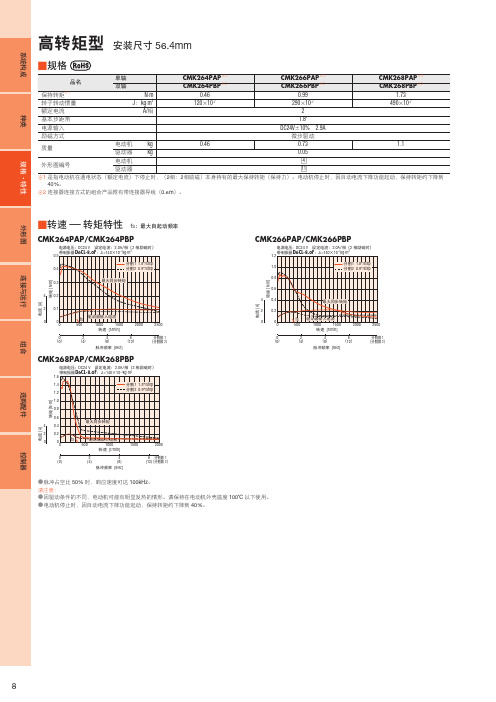
高转矩型 安装尺寸 56.4mm
Ⅵ规格
品名
单轴 双轴
CMK264PAP ˞ 2 CMK264PBP ˞ 2
CMK266PAP ˞ 2 CMK266PBP ˞ 2
CMK268PAP ˞ 2 CMK268PBP ˞ 2
保持转矩˞ 1
N·m
0.46
0.99
1.73
转子转动惯量
J:kg·m2
0.6 最大同步转矩
分割数1 1.8°/step 分割数2 0.9°/step
8 0.4
电流 [A] 转矩 [N·m]
4 0.2
驱动器输入电流
0
0
0
0 (0)
fs
500
1000
台邦无刷直流减速电机

直流电机的一般规格 General speci cations of DC motor
项目 Item
绝缘电阻 Insulation resistance
绝缘电压 Insulation voltage
温度上升 Temperature rise
绝缘等级 Insulation class
使用温度 Using temperature
使用湿度 Using humidity
参数 Parameter
在常温、常湿度下,运转电机后,以 DC500V 电阻表测量线圈、外壳间时,测量值为 20MΩ 以上。 In the circumstance of normal ambient temperature and humidity, the resistance can be up to 20MΩ or more when 500VDC megge is applied between the windings and the frame after rated motor operations.
印尼高压电机等级分类
印尼高压电机等级分类
印尼的高压电机等级分类主要参考了国际电工委员会(IEC)的标准,并结合了印尼国内的相关要求。
根据IEC标准,高压
电机可分为以下几个等级:
1.国际标准电机(IS):这是最常见的电机等级,适用于大
多数工业和商业应用。
它们通常具有标准输出功率和转速范围,并符合IEC60034标准。
2.高效电机(IE):这是一种具有更高能源效率的电机等级。
高效电机通常采用先进的设计和技术,以减少能源消耗和运行
成本。
它们通常符合IEC6003430部分标准,并具有更高的能效指标。
3.超高效电机(IE2和IE3):这是一种更高效的电机等级,通常用于要求更高能源效率的应用。
IE2和IE3分别代表一定
的最低能效指标,IE3是目前最高的能效等级。
这些电机通常包括先进的设计和材料,以提高效率并减少能源浪费。
4.防爆电机(Ex):这是一种用于危险环境的特殊电机等级,通常应用于易燃易爆气体或粉尘环境中。
防爆电机必须符合特
殊的防爆标准,并经过相关认证,以确保其在危险环境中的安
全运行。
此外,在印尼,高压电机的等级还与其额定功率和工作电压
有关。
通常,高压电机的额定功率范围为几十千瓦到数百千瓦,工作电压一般在380V至11kV之间。
总而言之,印尼的高压电机等级分类主要包括国际标准电机、高效电机、超高效电机和防爆电机。
根据应用的要求和能源效
率需求,选择合适的电机等级对于确保电机的正常运行和能源
节约至关重要。
综掘机EBZ部件构成

7、后支撑部
1、采用箱形焊接 结构;整体刚性好。 2、与本体采用特 殊螺纹连接,在强 震动下不松动。 3、二运回转角度 达到45°
8、水系统、润滑系统
水系统由外喷雾和内喷雾两部分组成。内、 外喷雾装置安装在截割部。
水系统的外来水经过滤器和球阀后分两 条路:第一分路经过减压阀(3MPa)进入内喷 雾将水直接喷出;第二分路经过减压阀 (1.5MPa)后又分两路,一路到油冷却器进入 外喷雾;另一路经过切割电机后进入外喷雾, 起到灭尘和冷却截齿的作用。
行走部包括履带架、马达、驱动轮、张紧轮履带板等部 分,是用两台液压马达分别驱动,通过减速机、驱动 链轮及履带实现行走。
1、可选用液压油、脂缸张紧;设有弹簧减震装置。 2、履带架通过键及M24的高强度螺栓固定在本体两侧,
在其侧面有盖板,方便张紧油缸的拆卸。 3、行走减速机与履带架、行走减速机与驱动链轮采用高
用双边链运输。 1、选用18×64煤矿通用圆环
链。 2、低速大扭矩双(单)液压
马达驱动,减少故障点维 修方便;液压马达有两种 一种为国产马达、另一种
4、第一运输机部
5、本体部
本体部位于机体的中部,是以高强厚钢板为主材焊接而成
的箱形结构。本体的右侧装有液压系统的泵站,左侧装有操纵台, 前面上部回转台装有截割部,下面装有铲板部,中间装有第一运 输机,在其左右侧下部装有行走部,后部装有后支承部。回转台
强度特殊螺纹连接,在强震动下不松动。 4、可选用支重轮和摩擦板式行走部。
6、行走部(履带式支重轮结构)
6、行走部(整体履带结构摩擦板式)
7、后支撑部
后支承用来减 少工作时机体的振 动,防止机体横向 滑动,在两边分别 装有升降支承腿油 缸。电控箱、泵站 电机都固定在后支 承上,后部配有与 二运连接的旋转托
FANUCNC内部指令
FANUCNC内部指令X004#0X004#1X004#1X004#2X004#2,#4各轴⼿动进给互锁信号X004#2,#4各轴⼿动进给互锁信号X004#3,#5各轴⼿动进给互锁信号X004#3,#5各轴⼿动进给互锁信号X004#6跳转信号(PMC轴控制)X004#7跳转信号X004#7扭矩过载信号X008#4急停信号X009参考点返回减速信号G000,G001外部数据输⼊的数据信号G002#0…#6外部数据输⼊的地址信号G002#7外部数据输⼊的读取信号G004#3结束信号G004#4第2M功能结束信号G004#5第3M功能结束信号G005#0辅助功能结束信号G005#1外部运⾏功能结束信号G005#2主轴功能结束信号G005#3⼑具功能结束信号G005#4第2辅助功能结束信号G005#5G005#6辅助功能锁住信号G005#7第2辅助功能结束信号G006#0程序再启动信号G006#2⼿动绝对值信号G006#4倍率取消信号G006#6跳转信号G007#1⾏程检测3解除信号G007#5跟踪信号G007#6存储⾏程极限选择信号G007#7⾏程到限解除信号G008#0互锁信号G008#1切削程序段开始互锁信号G008#3程序段开始互锁信号G008#4急停信号G008#5进给暂停信号测量位置到达信号地址信号名称X004#2..#6,#0,#1跳转信号G008#6复位和倒回信号G008#7外部复位信号G009#0 (4)⼯件号检索信号G010,G011⼿动移动速度倍率信号G012进给移动速度倍率信号G014#0,#1快速移动速度倍率信号G016#7F1位进给选择信号G018#0…#3G018#4...#7G019#0…#3G019#4,#5⼿轮进给量选择信号(增量进给信号)G019#7⼿动快速进给选择信号G023#5在位检测⽆效信号G024#0…G025#5扩展⼯件号检索信号G025#7扩展⼯件号检索开始信号G027#0G027#1G027#2G027#3G027#4G027#5G027#7主轴松开完成信号G028#5主轴夹紧完成信号G028#6主轴停⽌完成信号G028#7第2位置编码器选择信号G029#0齿轮档选择信号(输⼊)G029#4主轴速度到达信号G029#5主轴定向信号G029#6主轴停信号G030主轴速度倍率信号G032#0…G033#3主轴电机速度指令信号G033#5G033#6G033#7PMC 控制主轴速度输出控制信号G034#0…G035#3主轴电机速度指令信号G035#5主轴电机指令输出极性选择信号G035#6主轴电机指令输出极性选择信号G035#7PMC 控制主轴速度输出控制信号G036#0…G037#3主轴电机速度指令信号G037#5主轴电机指令输出极性选择信号G037#6主轴电机指令输出极性选择信号主轴选择信号⼿轮进给轴选择信号主轴电机指令输出极性选择信号各主轴提停⽌信号G037#7主轴电机速度选择信号G038#2主轴同步控制信号G038#3主轴相位同步控制信号G038#6B-轴松开完成信号G038#7B-轴夹紧完成信号G039#0…#5⼑具偏移号选择号G039#6⼯件坐标系偏移值写⼊⽅式选择信号G039#7⼑具偏移量写⼊⽅式选择信号G040#5值轴测量选择信号G040#6位置记录信号G040#7⼯件坐标系偏移量写⼊信号G041#0…#3G041#4…#7直接运⾏选择信号G043#0…#2⽅式选择信号G043#5DNC 运⾏选择信号G043#7⼿动返回参考点选择信号G044#0,G045跳过任选程序段信号G044#1所有轴机床锁住信号G046#1单程序段信号G046#3…#6存储器保护信号G046#7空运⾏信号G047#0…#6G047#0…G048#0G048#5⼑具跳过信号G048#6每把⼑具的更换复位信号G048#7⼑具更换复位信号G049#0…G050#1⼑具寿命计数倍率信号G053#0通⽤累计计数器启动信号G053#3⽤户宏程序中断信号G053#6误差检测信号G053#7倒⾓信号G054,G055⽤户宏程序输⼊信号G058#0程序输⼊外部启动信号G058#1外部都开始信号G058#2外部阅读/传出停⽌信号G058#3外部传出启动信号G060#7尾架屏蔽选择信号G061#0刚性攻丝信号G061#4,#5刚性攻丝主轴选择信号G062#1CRT 显⽰⾃动清屏取消信号G062#6刚性攻丝回退启动信号⼑具组号选择信号⼿轮中断轴选择信号G063#5垂直/⾓度轴控制⽆效信号G066#0所有轴VRDY OFF报警忽略信号G066#1外部键输⼊⽅式选择信号G066#4回退信号G067#7硬拷贝请求信号G070#0转矩限制LOW指令信号(串⾏主轴)G070#1转矩限制HIGH指令信号(串⾏主轴)G070#3,#2离合器/齿轮信号(串⾏主轴)G070#4CCW指令信号(串⾏主轴)G070#5CW指令信号(串⾏主轴)G070#6定向指令信号(串⾏主轴)G070#7机床准备就绪信号(串⾏主轴)G071#0报警复位信号(串⾏主轴)G071#1急停信号(串⾏主轴)G071#2主轴选择信号(串⾏主轴)G071#3动⼒线切换结束信号(串⾏主轴)G071#4软启动停⽌取消信号(串⾏主轴)G071#5速度积分控制信号(串⾏主轴)G071#6输出切换请求信号(串⾏主轴)G071#7动⼒线状态检测信号(串⾏主轴)G072#0准备位置变换信号(串⾏主轴)G072#1变换准停位置时旋转⽅向指令信号(串⾏主轴)G072#2变换准停位置时最短距离移动指令信号(串⾏主轴)G072#3微分⽅式指令信号(串⾏主轴)G072#4模拟倍率指令信号(串⾏主轴)G072#5增量指令外部设定型定向信号(串⾏主轴)G072#6变换主轴信号时主主轴MCC状态信号(串⾏主轴)G072#7⽤磁传感器时⾼输出MCC状态信号(串⾏主轴)G073#0⽤磁传感器的主轴定向指令(串⾏主轴)G073#1从动运⾏指令信号(串⾏主轴)G073#2电机动⼒关断信号(串⾏主轴)G073#4断线检测⽆效信号G074#0转矩限制LOW指令信号(串⾏主轴)G074#1转矩限制HIGH指令信号(串⾏主轴)G074#3,#2离合器/齿轮档信号(串⾏主轴)G074#4CCW指令信号(串⾏主轴)G074#5CW指令信号(串⾏主轴)G074#6定向指令信号(串⾏主轴)G074#7机床准备就绪信号(串⾏主轴)主轴选择信号(串⾏主轴)G075#3动⼒线切换完成信号(串⾏主轴)G075#4软启动停⽌取消信号(串⾏主轴)G075#5速度积分控制信号(串⾏主轴)G075#6输出切换请求信号(串⾏主轴)G075#7动⼒线状态检测信号(串⾏主轴)G076#0准停位置变换信号(串⾏主轴)G076#1变换准停位置时旋转⽅向指令信号(串⾏主轴)G076#2变换准停位置时最短距离移动指令信号(串⾏主轴)G076#3微分⽅式指令信号(串⾏主轴)G076#4模拟倍率指令信号(串⾏主轴)G076#5增量指令外部设定型定向信号(串⾏主轴)G076#6变换主轴信号时主主轴MCC 状态信号(串⾏主轴)G076#7⽤磁传感器时HIGH 输出MCC 状态信号(串⾏主轴)G077#0⽤磁传感器的主轴定向指令(串⾏主轴)G077#1从动运⾏指令信号(串⾏主轴)G077#2电机动⼒关断信号(串⾏主轴)G077#4断线检测⽆效信号(串⾏主轴)G078#0…G079#3G080#0…G081#3G091#0…#3组号指定信号G092#0I/O Link 确认信号G092#1I/O Link 指定信号G092#2Power Mate 读/写进⾏中信号G092#3Power Mate 读/写报警信号G092#4Power Mate 后台忙信号G096#0…#61%快速进给倍率信号G096#71%快速进给倍率选择信号G098键代码信号G100进给轴和⽅向选择信号G101#0…#3外部减速信号2G102进给轴和⽅向选择信号G103#0…#3镜像信号G107#0…#3外部减速信号3G108各轴机床锁住信号G109#0…#3外部减速信号3G110G112G114G116坐标⽅向存储⾏程限位开关信号⾏程极限外部设定信号超程信号主轴定向外部停⽌的位置指令信号G118G120G124#0…#3控制轴脱开信号G125异常负载检测忽略信号G126伺服关闭信号G127#0…#3Cs 轮廓控制⽅式精细加/减减速功能⽆效信号G130各轴互锁信号G132#0…#3G134#0…#3G136控制轴选择信号(PMC 轴控制)G138简单同步轴选择信号G140简单同步⼿动进给轴选择信号G142#0辅助功能结束信号(PMC 轴控制)G142#1累积零位检测信号G142#2缓冲禁⽌信号(PMC 轴控制)G142#3程序段停信号(PMC 轴控制)G142#4伺服关断信号(PMC 轴控制)G142#5轴控制指令读取信号(PMC 轴控制)G142#6复位信号(PMC 轴控制)G142#7轴控制指令读取信号(PMC 轴控制)G143#0… #6轴控制指令信号(PMC 轴控制)G143#7程序段停禁⽌信号(PMC 轴控制)G144,G145轴控制进给速度信号(PMC 轴控制)G146…G149倍率取消信号(PMC 轴控制)G150#6⼿动快速进给选择信号(PMC 轴控制)G150#7空运⾏信号(PMC 轴控制)G151进给速度倍率信号(PMC 轴控制)G154#0辅助功能结束信号(PMC 轴控制)G154#1累积零检测信号G154#2缓冲禁⽌信号(PMC 轴控制)G154#3程序段停信号(PMC 轴控制)G154#4伺服关闭信号(PMC 轴控制)G154#5轴控制暂停信号(PMC 轴控制)G154#6复位信号(PMC 轴控制)G154#7轴控制指令读取信号(PMC 轴控制)G155#0…#6轴控制指令信号(PMC 轴控制)G155#7程序段停信号(PMC 轴控制)G156,G157轴控制进给速度信号(PMC 轴控制)G158…G161轴控制数据信号(PMC 轴控制)G166#0辅助功能结束信号(PMC 轴控制)G166#1累积零检测信号各轴和⽅向互锁信号外部减速信号G166#2缓冲禁⽌信号(PMC轴控制)G166#3程序段停信号(PMC轴控制)G166#4伺服关断信号(PMC轴控制)G166#5轴控制暂停信号(PMC轴控制)G166#6复位信号(PMC轴控制)G166#7轴控制指令读取信号(PMC轴控制)G167#0…#6轴控制指令信号(PMC轴控制)G167#7程序段停禁⽌信号(PMC轴控制)G168,G169轴控制进给速度信号(PMC轴控制)G170…G173轴控制数据信号(PMC轴控制) G178#0辅助功能结束信号(PMC轴控制) G178#1累积零检测信号G178#2缓冲禁⽌信号(PMC轴控制)G178#3程序段停信号(PMC轴控制)G178#4伺服关闭信号(PMC轴控制)G178#5轴控制暂停信号(PMC轴控制)G179#0…#6轴控制指令信号(PMC轴控制)G179#7程序段停禁⽌信号(PMC轴控制)G180,G181轴控制进给速度信号(PMC轴控制)G182…G185轴控制数据信号(PMC轴控制) G192各轴VRDY OFF报警忽略信号(PMC轴控制) G198位置显⽰忽略信号G199#0⼿摇脉冲发⽣器选择信号G199#1⼿摇脉冲发⽣器选择信号G200轴控制⾼级指令信号G274#4Cs轴坐标系建⽴请求信号G349#0…#3伺服转速检测有效信号G359#0…#3各轴在位检测⽆效信号符号XAEYAEZAEZAEMIT1,MIT2MIT1,MIT2SKIP2..SKIP6,SKIP7,SKIP8负MIT1,负MIT2负MIT1,负MIT2ESKIPSKIPSKIP*ESP*DEC1…*DEC4ED0…ED15EA0…EA6ESTBFINMFIN2MFIN3MFINEFINSFINAFLBFINSRN*ABSMOVCSKIPPSTLKSTRLSOT3*FLWUEXLMRLSOT*IT*CSL*BSL*ESP*SPEPSPN1,PN2,PN4,PN8,PN16 *JVO…*JV15*FV0…*FV7ROV1,ROV2F1DHS1A…HS1DHS2A…HS2DHS3A…HS3DMP1,MP2RTNOINPSEPN0…EPN13EPNSSWS1SWS2*SSTP3 CONCR1,CR2*SUCPF*SCPF SPSTPPC25LCGR21SARSOR*SSTP SOVO…SOV7 R01I (12) SGN2SSIN2SIND2R01I2…R12I2 SGN2SSIN2SIND2R01I3…R12I3 SGN3SSIN3 SPSYC SPPHS*BECUP*BECLP OFN0…OFN5 WOQSM GOQSMS2TLSPRCMD1,MD2,MD4 DNCIZRNBDT1,BDT2…BDT9 MLKSBKKEY1…KEY4 DRNTL01…TL64TL01…TL256 TLSKPTLRSTITLRST*TLV0…*TLV9 TMR ONUINTSMZCDZUI000…UI015 MINPEXRDEXSTPEXWT*TSBRGTAPRGTSP1*CRTOFRTNTIGNVRYENBKYRTRCTEKSETTLMHA CTHIA,CTH2A SRVASFRAO RCMAMRDYAARSTA*ESPASPSLAMCFNASOCANINTGARSLARCHAINDXAROTAANRROADEFMDAOVRAINCMDAMFNHGARCHHGAM O RCMASLVAMP O FADSCNATLMLBTLMHB CTH1B,CTH2B SRVBSFRBO RCMBMRDYBARSTBINTGBRSLBRCHBINDXBROTABNRROBDEFMDBO VRBINCMDBMFNHGBRCHHGBM O RCMBSLVBMPOFBDSCNB SHA00…SHA11 SHB00…SHB11 SRLNI0…SRLNI3 I0LACKI0LSBGIONBGIALMBGEN*HR0V0…*HR0V6HR O VEKC0…EKC7J1…J4*+ED21…*+ED24_J1…_J4*-ED21…*-ED24EXL1…EXL4 _EXL1…_EXL4MI1…MI4*+ED31…*+ED34 MLK1…MLK4 *-ED31…*-ED34LM1…LM4_LM1…_LM4*+ED1…*+ED4 *-ED1…*-ED4 DTCH1…DTCH4 IUDD1…IUDD4 SVF1…SVF4CDF1…CDF4*IT1…*IT4MIT1…MIT4_MIT1…_MIT4 EAX1…EAX4 SYNC1…SYNC4 SYNCJ1…SYNCJ4 EFINAELCKZAEMBUFAESBKAESOFAESTPAECLRAEBUFAEC0A…EC6AEMSBKA EIF0A…EIF15A EID0A…EID31A ROV1E,ROV2EO VCERTEDRNE*FV0E…*FV7EEFINBELCKZBEMBUFBESBKBESOFBESTPBECLRBEBUFBEC0B…EC6BEMSBKB EIF0B…EIF15B EID0B…EID31BEFINCELCKZCEMBUFCESTPCECLRCEBUFCEC0C…EC6CEMSBKCEIF0C…EIF15C EID0C…EID31CEFINDELCKZDEMBUFDESBKDES O FDESTPDECLRDEBUFDEC0D…EC6DEMSBKDEIF0D…EIF15D EID0D…EID31D IGVRY1…IGVRY4 NP0S1…NP0S4 IOLBH2IOLBH3 EASIP1…EASIP4CSFI1 SVSCK1…SVSCK4 N0INP1…N0INP4。
ZAPI(萨牌)控制器ACE2 重要参数以及调试步骤
ACE2 重要参数翻译8.7 交流控制器作为牵引的设置顺序当钥匙开关打开,如果没有报警或者错误提示,编程器会显示标准的ZAPI开机画面显示。
那控制器没有满足你的配置要求而配置,可以根据9.2章节的细节,,当改变任何控制器的配置以后,记得要反复开关钥匙开关(上电生效)。
可以根据下面的细节内容进行配置。
1、选择需要修改的选项,看8.4.1章节2、选择并设置电池电压,看8.4.1章节。
3、用手持编程器的TESTER 功能,来测试导线保证所有电线连接正确。
4、用手持编程器的加速器信号修正功能(PROGRAM V ACC)。
来采集加速器信号。
操作步骤细节在9.4章节。
5、设置MAXIMUM CURRENT 最大电流值,使用表格在8.5.1章节6、根据车辆设置加速延时,并从两个方向对次参数进行测试。
ACCELER DELAY 加速延迟、DECELER SELAY 减速延迟7、设置FREQUENCY CREEP,从0.3HZ开始设置,加速器微动开关开始闭合,车辆应能刚好启动,据此相应的增加爬行频率的大小HZ。
8、设置速度降低(SPEED REDUCTIONS)。
调整CUTBACK SPEED ,通过加速器踏板完全踩到底,检查性能。
如果是叉车,核对负载和无负载情况下检查加速器的性能。
9、释放制动(RELEASE BRAKING),将车辆开到全速,释放加速器踏板,调整参数到满足制动要求,如果设备是叉车,核对负载和无负载情况下的性能表现。
10、反接制动(INVERSION BRAKING),将车辆设备开到全速的25%,同时接反向开关,设置制动软水平,检查这时制动强度是否符合要求,若符合将车辆开到全速再调。
无负载全速的条件下的测试,应该是非常具有代表性的。
11、踏板制动(DECELERATION BRAKING ),操作设备到全速,再释放加速器到50%,幅度达到,调整参数到你的要求,12、PEDAL BRAKING ,,操作设备到全速,释放加速器,踩下制动踏板,根据性能需求设置刹车参数,13、SPEED LIMIT BRAKING,操作设备到全速,关闭减速开关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ZAE减速机、ZAE变速箱、ZAE齿轮电机、ZAE齿轮马达、ZAE齿轮变速箱、ZAE角度变速箱、ZAE伺服减速机
德国ZAE-AntriebsSysteme GmbH & Co KG公司产品简介:
1.ZAE特殊设计组件:根据您的严格要求,我们设计制造出能满足您需求的蜗轮传动产品。
2.ZAE蜗轮减速箱:12个标准比率从5:1到83:1, 轴间距为40到315mm, 可承受扭矩高达27,700Nm。
3.ZAE伺服减速机:四种不同的尺寸,ZAE减速机,ZAE减速电机,ZAE伺服减速机,ZAE减速箱,减速比率可由5到40,非常安静的设计,带有紧急脱开系统。
4.ZAE斜齿轮组件:模数m=0.5 ~6,外径达5~320Nm,工件长度最大可达1, 00mm,齿宽可达200mm。
5.ZAE蜗轮蜗杆组件:输出扭矩高达27, 700Nm,轴间距可由30到400mm,且可根据客户需要设计相应的减速比。
德国ZAE减速机,ZAE减速机,ZAE减速机报价,ZAE蜗轮蜗杆,ZAE 蜗轮蜗杆减速机,ZAE齿轮减速机,ZAE减速电机,ZAE伺服减速机,ZAE减速箱,ZAE蜗轮减速箱,ZAE锥齿轮换向器,ZAE斜齿轮组件,ZAE蜗轮蜗杆组件,ZAE特殊设计组件
6.ZAE锥齿轮换向器:6种尺寸,4种标准比率,也可根据您的要求设计制作您所需要的变速比,输出扭矩可达2, 400Nm。
7.ZAE减速电机:多种形式的齿轮传动,功率可有0.09kw到75kw,转速为0.2到500rpm,最大输出扭矩则可达27, 000Nm。
上海智川工贸有限公司优势供应德国ZAE减速机、ZAE变速箱、ZAE齿轮电机、ZAE齿轮马达、ZAE齿轮变速箱、ZAE角度变速箱、ZAE伺服减速机。