武汉科技大学_机械原理2007考研真题
武汉科技大学机械原理2007答案考研专业课真题

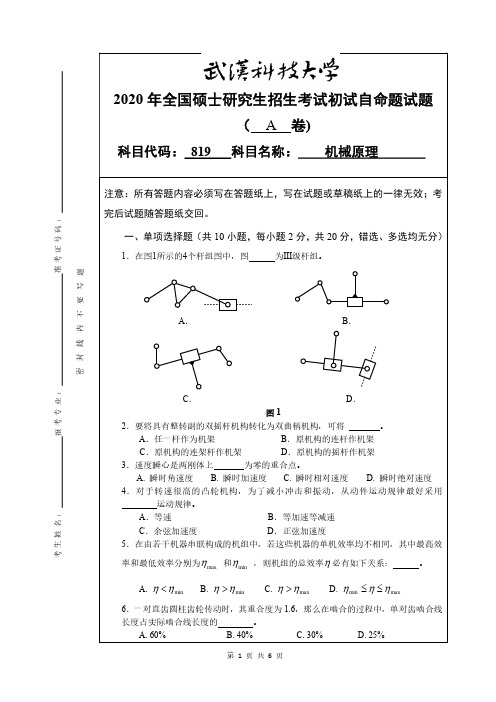
2)在图1所示机构中存在 A.复合铰链 C.虚约束
B.局部自由度 D.前三者均无
3)如果作用在径向轴颈上的外力加大,那么轴颈上摩 擦圆 C A.变大 C.不变 。 B.变小 D.变大或不变 不受中心距变化的影响。 图1
4)渐开线直齿圆柱齿轮传动的可分性是指 B A.节圆半径 B.传动比
C.啮合角
5)蜗杆传动中,若知轴交角 90 ,蜗轮螺旋角 2 7 右旋,那么蜗杆的升 角是 C A. 83 右旋 B. 83 左旋 C. 7 右旋 D. 7 左旋
17 15 17 21 = 0.1176, 2 min = =-0.2353 17 17
I B
K LБайду номын сангаасJ 2
A
图2 复合铰链
∵ x1 > 1 min , x2 > 2 min ∴ 两轮不根切。 2、 求出这一对齿轮作无侧隙啮合传动时的中心距 a ; [解]: a =
m( Z 1 Z 2 ) cos = 90.614mm。 2 cos
6)外凸轮为了保证有正常的实际轮廓曲线,其滚子半径应 理论轮廓的最小曲率半径。 A.小于 B.大于 C.等于 D.大于等于
A
7)加工负变位齿轮时,刀具应如何移位? C 。 A.刀具中线与分度圆相切 C.刀具中线与分度圆相割 8)对于周期性速度波动应如何调节?B A.用调速器 B.用飞轮 C.用解调器 B.刀具中线与分度圆相离
6、在凸轮机构的几种基本的从动件规律中, 等速 运动规律使凸轮产生刚性冲击, 等加速等减速 运动规律产生柔性冲击, 7、渐开线上各处的压力角 不相 正玄运动规律则没有冲击。 等。 ,渐开线上各点的曲率半径是
8、渐开线上任一点的法线与基圆 相切 的不等的。
武汉科技大学机械原理2007--2019年考研真题(2007--2009,2011--2019有答案)

第 1 页 共 163 页 姓名:报考专业: 准考证号码: 密封线内不要写题 2019年全国硕士研究生招生考试初试自命题试题 科目名称:机械原理(□A 卷 ■B 卷)科目代码:819 考试时间: 3小时 满分150分 可使用的常用工具:□无 √计算器 √直尺 √圆规(请在使用工具前打√) 注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。
一、单项选择题(本大题10小题,每题2分,共20分,错选、多选均无分) 1. 以下关于机构的说法错误的是 。
A .一个机构中有且仅有一个机架 B .平面机构中,移动副引入了2个约束,齿轮副引入了1个约束 C .任何机构都可以看成是由若干个基本杆组依次联接于原动件和机架上而构成的 D .机构具有确定运动时所必须给定的运动参数的数目,称为机构的自由度 2.以下关于速度瞬心的说法错误的是: 。
A .一个平面机构有6个构件,则共有12个瞬心 B .机构中某个构件和机架构成的瞬心一定是绝对瞬心 C .两个互相啮合传动的齿轮的瞬心在过接触点的齿廓公法线上 D .一个平面四杆机构中,绝对瞬心和相对瞬心的数目是一样的 3.铰链四杆机构的最小传动角出现在 的两个位置之一。
A .曲柄和机架共线 B .曲柄和连杆共线 C .曲柄和摇杆共线 D .曲柄与机架垂直 4. 对心曲柄滑块机构有曲柄的条件是 。
A .曲柄大于连杆长度 B .曲柄小于连杆长度 C .曲柄等于连杆长度 D .曲柄等于连杆长度的二分之一 5.在凸轮机构中,当从动件采用等加速等减速运动规律时, 。
A . 存在速度突变点而不存在加速度突变点 B . 存在加速度突变点而不存在速度突变点 C . 不存在速度突变点也不存在加速度突变点 D . 不会产生柔性冲击也不会产生刚性冲击 6.一对互相啮合的齿轮由于装配误差,使得实际中心距相比标准中心距略有增大,则此时该对齿轮的 。
A .传动比不变,啮合角变大 B .传动比不变,啮合角不变 C .传动比增大,啮合角变大 D .传动比增大,啮合角不变 7.与标准齿轮相比,正变位齿轮的齿顶高 标准值。
机械原理试卷(手动组卷).1
武汉科技大学《机械原理》题目部分,(卷面共有97题,468.0分,各大题标有题量和总分)一、填空题(23小题,共64.0分)1.(2分)速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
2.(2分)在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
3.(4分)在移动副摩擦中,总反力是和的合力。
4.(5分)机构中的复合铰链是指;局部自由度是指;虚约束是指。
5.(3分)具有、、等三个特征的构件组合体称为机器。
6.(2分)机器是由、、所组成的。
7.(2分)机器和机构的主要区别在于。
8.(2分)从机构结构观点来看,任何机构是由三部分组成。
9.(2分)运动副元素是指。
10.(2分)构件的自由度是指;机构的自由度是指。
11.(2分)两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留了个自由度。
12.(2分)机构中的运动副是指。
13.(2分)机构具有确定的相对运动条件是原动件数机构的自由度。
14.(2分)在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。
15.(2分)平面运动副的最大约束数为,最小约束数为。
16.(2分)当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。
17.(5分)计算机机构自由度的目的是_______________________________________________________________________________ _____________________________________________________________________。
18.(2分)在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
19.(5分)计算平面机构自由度的公式为F ,应用此公式时应注意判断:A、铰链,B、自由度,C、约束。
武汉科技大学机械原理习题参考答案1
机械原理课后习题参考答案机械原理课程组编武汉科技大学机械自动化学院习题参考答案第二章 机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头443512解答:原机构自由度F=3⨯3- 2⨯4-1 = 0,不合理 , 改为以下几种结构均可:2-3 图2-3936为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b )解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:① 当未刹车时,F=3⨯6-2 ⨯8=2②在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG 和车轮接触成为一体,位置保持不变,可看作为机架。
③ 完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG 、HIJ 和车轮接触成为一体,位置保持不变,可看作为机架。
2-9 先计算图2-45~图2-50所示平面机构的自由度。
机械原理考试试题(doc 10页)(正式版)
所有答案均写在答题纸上,在此答题无效。
机械原理部分(75分)一.选择题(共20分)1. 机械平衡研究的内容是(A) 驱动力与阻力间的平衡(B) 各构件作用力间的平衡(C) 惯性力系的平衡(D) 输入功率与输出功率间的平衡2. 槽数z 4的外啮合槽轮机构,主动销数最多可取。
(A)1 (B)2 (C)3 (D)43.为保证一对渐开线齿轮连续传动,应使实际啮合线长度基圆齿距。
(A)大于等于;(B) 小于等于;(C)小于。
4. 一对外啮合斜齿圆柱齿轮的正确啮合条件是 。
(A)m n1= m n2; (B) αn1=αn2;(C)m n1= m n2,αn1=αn2,β1=-β2;(D)m n1= m n2,αn1=αn2,β1=β2。
5. 增加斜齿轮传动的螺旋角,将引起 。
(A)重合度减小,轴向力增加; (B)重合度减小,轴向力减小; (C )重合度增加,轴向力减小; (D)重合度增加,轴向力增加。
6. 一对渐开线齿轮啮合传动时,两齿廓间 。
(A )保持纯滚动; (B)各处均有相对滑动; (C)除节点外各处均有相对滑动。
7. 凸轮机构中从动件作等加速等减速运动时将产生 冲击。
(A)刚性; (B)柔性; (C)无刚性也无柔性.8. 在曲柄摇杆机构中,当摇杆为主动件,且 处于共线位置时,机构处于死点位置。
(A)曲柄与机架; (B)曲柄与连杆; (C)连杆与摇杆。
9. 在由若干机器串联构成的机组中,若这些机器的单机效率均不相同,其中最高效率和最低效率分别为ηmax 和ηmin ,则机组的总效率η 必有如下关系: 。
(A) ηη<min ; (B)ηη>;max (C) ηηηmin max ≤≤;10. 连杆机构行程速比系数是指从动杆反、正行程 。
(A)瞬时速度的比值(B)最大速度的比值(C)平均速度的比值二.计算图示机构的自由度,并分析组成此机构的基本杆组。
由又如在该机构中改选 EG 为原动件,试问组成此机构的基本杆组是否与前有所不同,为什么?(10分)机架4力驱动滑块3 向上运动。
武汉科技大学(已有09试题)

武汉科技大学机械自动化学院材料力学2004——2009(2005——2006有答案)理论力学2005——2009(2005——2009有答案)测试技术2005——2009(2005——2009有答案)管理学原理(管理学院)2008——2009(2008——2009有答案)管理学原理(Ⅰ)(管理学院)2004——2007(2004——2007有答案)管理学原理(Ⅱ)(机械自动化学院)2005——2007(2005——2007有答案)机械原理2007——2009(2007——2009有答案)液压传动2005,2007——2009(2005,2007——2009有答案)液压传动系统2004,2006(2004,2006有答案)控制原理2004——2009(2004——2009有答案)汽车理论2007——2009(2007——2009有答案)流体力学(流体机械及工程专业)2007(2007有答案)流体力学(市政工程专业)2007(2007有答案)机械工程测试技术基础2004(2004有答案)运筹学2009(2009有答案)运筹学原理2008材料与冶金学院材料科学基础2009(2009有答案)材料学基础2006——2008(2006——2008有答案)硅酸盐物理化学2005——2007(2005——2007有答案)物理化学2004——2007,2009(2004——2007,2009有答案)固体物理2008——2009(2008——2009有答案)固体物理学2007(2007有答案)固体物体2004——2006(2004——2006有答案)材料力学2004——2009(2005——2006有答案)金属学2004——2009(2004——2009有答案)金属学原理2004——2005(2005有答案)软件基础(1)(含数据结构和计算机组成原理)2004,2007(2004有答案)软件基础Ⅱ(含数据结构和离散数学)2007(2007有答案)数据结构2005——2006,2008——2009(2005——2006有答案)冶金物理化学2004——2009(2005——2009有答案)化学工程与技术学院物理化学2004——2007,2009(2004——2007,2009有答案)化工原理2004——2009(2004——2009有答案)有机化学2004——2009(2004——2008有答案)生物化学(临床医学、预防医学、护理学等专业)2009(2009有答案)生物化学(临床医学、预防、高护、药学等专业)2004——2005,2007——2008(2005,2007——2008有答案)生物化学(化学工艺专业,生物工程方向)2005——2008(2005——2008有答案)无机化学2004,2007(2007有答案)无机材料物理化学2008信息科学与工程学院电路1999——2009(2004——2009有答案)(注:2004——2005年称“电路理论”)(另有1996——2003年电路理论期末考试试卷,每份5元)电子技术2004——2009(2004——2009有答案)信号与系统2004——2009(2004——2009有答案)计算机科学与技术学院软件基础(1)(含数据结构和计算机组成原理)2004,2007(2004有答案)软件基础Ⅱ(含数据结构和离散数学)2007(2007有答案)数据结构2005——2006,2008(2005——2006有答案)离散数学2008(2008有答案)管理学院管理学原理(管理学院)2008——2009(2008——2009有答案)管理学原理(Ⅰ)(管理学院)2004——2007(2004——2007有答案)管理学原理(Ⅱ)(机械自动化学院)2005——2007(2005——2007有答案)概率论与数理统计2004——2009(2005——2009有答案)微观经济学2004——2009(2004——2009有答案)文法与经济学院马克思主义哲学原理2004——2009(2004——2009有答案)马克思主义基本原理2007——2009(2007——2009有答案)法理学2007——2009(2007——2009有答案)社会主义市场经济学2007——2009(2007——2009有答案)思想政治教育学原理2007——2009(2007——2009有答案)自然辩证法2004——2009(2004——2008有答案)公共管理学2007——2009(2007——2009有答案)公共行政学2007——2009政治学理论与实务2007——2009(2007——2009有答案)政治学与公共管理2006(2006有答案)政治学原理2004——2005(2004——2005有答案)社会保障学2004——2009(2004——2008有答案)经济学综合(政治经济学占40%,宏微观经济学占60%)2007——2009(2007——2009有答案)理学院高等代数2004——2009(2005——2006有答案)数学分析2004——2008(2006——2007有答案)应用数学专业综合考试(复试)2003材料力学2004——2009(2005——2006有答案)工程力学2004——2009(2006,2008——2009有答案)医学院生物化学(临床医学、预防医学、护理学等专业)2009(2009有答案)生物化学(临床医学、预防、高护、药学等专业)2004——2005,2007——2008(2005,2007——2008有答案)生物化学(化学工艺专业,生物工程方向)2005——2008(2005——2008有答案)卫生综合2004,2007,2009(2007——2009有答案)城市建设学院流体力学(流体机械及工程专业)2007(2007有答案)流体力学(市政工程专业)2007(2007有答案)结构力学2004——2009(2005——2009有答案)外国语学院二外德语2004——2009(2004——2009有答案)二外法语2007——2009(2007——2009有答案)二外日语2005——2009(2005——2007,2009有答案)写作与翻译2004——2009(2004——2006有答案)专业综合(基础英语占三分之二,语言学占三分之一)2005——2009(2005——2009有答案)资源与环境工程学院物理化学2004——2007,2009(2004——2007,2009有答案)化工原理2004——2009(2004——2009有答案)岩石力学2005(2005有答案)岩体力学2004安全系统工程2009(2009有答案)环境工程微生物学2009(2009有答案)环境工程微生物2007——2008(2007——2008有答案)环境化学2004——2006(2004——2006有答案)工程力学2004——2009(2006,2008——2009有答案)地理信息系统2004,2006(2006有答案)土力学2004——2009(2004——2006,2008——2009有答案)水力学2004——2006,2009(2005——2006有答案)工程流体力学2004——2009(2006——2009有答案)界面分选原理2005——2009(2005——2009有答案)矿业运筹学2004——2009(2004——2009有答案)资源与环境经济学2009(2009有答案)资源环境经济学2004——2008(2004——2008有答案)房屋建筑学2009(2009有答案)。
武汉科技大学_436-管理学原理Ⅱ 2007考研真题
武汉科技大学
2007年硕士研究生入学考试试题
考试科目及代码:管理学原理II 436 共 5 页说明:1.适用招生专业:机械制造及其自动化
2.答题内容写在答题纸上,写在试卷或草稿纸上一律无效。
3.考试时间3小时,总分值150分。
一.名词解释(24分,每小题3分。
)
1.目标管理
2.例行问题
3.马斯洛的需要层次理论
4.专一化战略
5.权变管理理论
6.组织变革
7.控制
8.流动比率
二.单项选择题(30分,每小题2分。
)
1.要想避免多头领导和多头指挥,就必须做好组织中的哪项工作()。
A. 计划
B. 组织
C. 领导
D. 控制2.参谋职权是指()。
A.上级指挥下级工作的权力
B. 表现为上下级之间的命令权力关系
C. 协助和建议的职权
D. 对于达到组织目标具有直接贡献、负有直接的责任。
3.目标管理最早的提出者是()。
A.泰勒
B.德鲁克
C.卡曼
D.斯隆
第 1 页共 6 页。
机械原理 试题答案全
齐齐哈尔大学试卷考试科目:机械原理 试卷编号A适用对象:机械原理085-087本 使用学期:2009—2010—2 第 二 学期 课程编码:11202013 共 9 道大题 总分100分 共5 页考生须知:1) 姓名必须写在装订线左侧,其它位置一律作废。
2) 请先检查是否缺页,如缺页应向监考教师声明,否则后果由考生负责。
3) 答案一律写在答题纸上,可不抄题,但要标清题号。
4) 用兰色或黑色的钢笔、圆珠笔答题。
监考须知:请将两份题签放在上层随答题纸一起装订。
一、以下为填空题(每空1分,共16空16分)1、划分机构的杆组时应先按 低 的杆组级别考虑,机构的级别按杆组中的_最高_级别确定。
2、计滚子从动件盘形凸轮机构时,滚子中心的轨迹称为凸轮的 理论 廓线;与滚子相包络的凸轮廓线称为 实际 廓线。
3、曲柄摇杆机构中,最小传动角发生的位置在曲柄与机架重叠和拉直时两者传动角小者的位置。
4、决定渐开线标准直齿圆柱齿轮尺寸的参数有z 、m 、a 、h a*、c*;写出用参数表示的齿轮尺寸公式:r =zm2;r b =r cos α;r a =r h m+a *;r f =r h c m-+()a **。
5、用范成法加工渐开线直齿圆柱齿轮,发生根切的原因是刀具的齿顶线或齿顶圆超过了啮合线与轮坯基圆的切点。
6、齿条刀具与普通齿条的区别是具有刀刃的齿条且刀具齿顶高为()**h c m a +。
7、对于绕固定轴回转的构件,可以采用重新调整构件上各量的大小和分布的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存 在作往复运动或平面复合运动的构件应采用重新调整或分配整个机构的质量分布方法,方能使作用于机架上的总惯性力得到平衡。
8、设机器中的实际驱动力为P,在同样的工作阻力和不考虑摩擦时的理想驱动力为0P ,则机器效率的计算式是η=η=P P 0/。
9、齿式棘轮机构制动爪的作用是防止棘轮逆转。
二、判断题( 10题、每题1分、共10分 )1、两个渐开线直齿圆柱齿轮的齿数不同,但基圆直径相同,则它们一定可以用同一把齿轮铣刀加工。
机械原理试卷.1
武汉科技大学《机械原理》题目部分,(卷面共有97题,分,各大题标有题量和总分)一、填空题(23小题,共分)1.(2分)速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
2.(2分)在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
3.(4分)在移动副摩擦中,总反力是和的合力。
4.(5分)机构中的复合铰链是指;局部自由度是指;虚约束是指。
5.(3分)具有、、等三个特征的构件组合体称为机器。
6.(2分)机器是由、、所组成的。
7.(2分)机器和机构的主要区别在于。
8.(2分)从机构结构观点来看,任何机构是由三部分组成。
9.(2分)运动副元素是指。
10.(2分)构件的自由度是指;机构的自由度是指。
11.(2分)两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留了个自由度。
12.(2分)机构中的运动副是指。
13.(2分)机构具有确定的相对运动条件是原动件数机构的自由度。
14.(2分)在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。
15.(2分)平面运动副的最大约束数为,最小约束数为。
16.(2分)当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。
17.(5分)计算机机构自由度的目的是_______________________________________________________________________________ _____________________________________________________________________。
18.(2分)在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。
19.(5分)计算平面机构自由度的公式为F ,应用此公式时应注意判断:A、铰链,B、自由度,C、约束。
武汉科技大学常微分方程考研真题试题2007、2008年

武汉科技学院
2008年招收硕士学位研究生试卷科目代码827 科目名称常微分方程(B卷)考试时间2008年1月20日下午报考专业计算机应用技术
1、试题内容不得超过画线范围,试题必须打印,图表清晰,标注准确。
2、试题之间不留空格。
3、答案请写在答题纸上,在此试卷上答题无效。
题号一二三四五六七八九十十一得分得分
本试卷总分150分,考试时间3小时。
共 2 页第 1 页
共页第页
共 2 页第 2 页
武汉科技学院
2008年招收硕士学位研究生试卷科目代码827 科目名称常微分方程(A卷)考试时间2008年1月20日下午报考专业计算机应用技术
1、试题内容不得超过画线范围,试题必须打印,图表清晰,标注准确。
2、试题之间不留空格。
3、答案请写在答题纸上,在此试卷上答题无效。
题号一二三四五六七八九十十一得分得分
本试卷总分150分,考试时间3小时。
共 2 页第 1 页
共页第页
共 2 页第 2 页
武汉科技学院
2007年招收硕士学位研究生试卷科目代码427 科目名称常微分方程(A卷)
考试时间2007年1月21日下午报考专业计算机应用技术
1、试题内容不得超过画线范围,试题必须打印,图表清晰,标注准确。
2、试题之间不留空格。
3、答案请写在答题纸上,在此试卷上答题无效。
题号一二三四五六七八九十十一得分得分
本试卷总分150分,考试时间3小时。
共 2 页第 1 页
共页第页
共 2 页第 2 页。
武汉科技大学机械原理习题及参考答案大学学位论文
机械原理课后习题参考答案机械原理课程组编武汉科技大学机械自动化学院习题参考答案第二章 机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头443512解答:原机构自由度F=3⨯3- 2⨯4-1 = 0,不合理 , 改为以下几种结构均可:2-3 图2-3936为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b )解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:① 当未刹车时,F=3⨯6-2 ⨯8=2②在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG 和车轮接触成为一体,位置保持不变,可看作为机架。
③ 完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG 、HIJ 和车轮接触成为一体,位置保持不变,可看作为机架。
2-9 先计算图2-45~图2-50所示平面机构的自由度。
武科大机原试卷07级(A)
(10 分)
注:无侧隙啮合方程式: inv
2 tan ( x1 x2 ) inv z1 z 2
Z2=36
a′=71mm
Z1=33
Z3=36
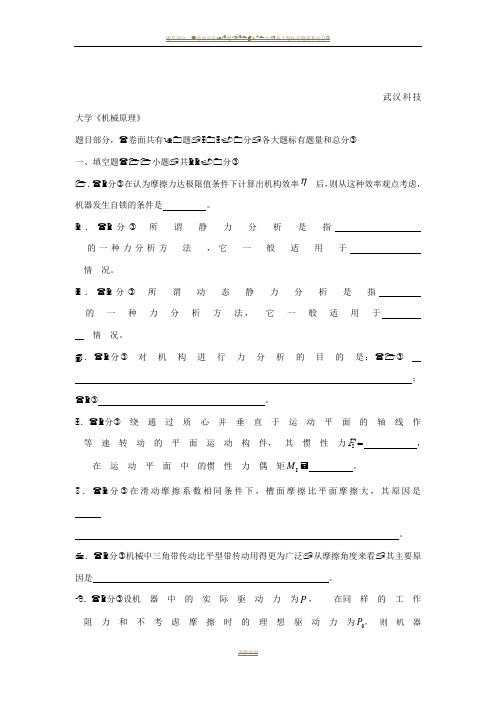
图 6 滑移齿轮变速机构
5. 如图 7 示轮系中,已知各轮齿数为: z1 20 , z 2 34 , z3 18 , z 4 36 , z5 78 , (10 分) z6 z7 26 ,求轮系传动比 i1H 。
1. 以下说法正确 的是: .. A.两个构件直接接触所构成的联接称为运动副。 B.自由度为零的运动链称为基本杆组。 C.球销副的自由度为 2,意味着它引入了 4 个约束。 D.某一构件组由 4 个构件组成,其中有 5 个低副,1 个高副,则它可以组成一个基本的 Ⅲ级杆组。 2. 渐开线上某点的压力角是指该点所受的正压力的方向与该点 方向间所夹的锐角, 渐开线上离基圆越远的点,其压力角也越 。 A.法线 ;大 B.切线 ;小 C.相对速度;小 D.绝对速度 ;大 3. 图 1 所示为摆动导杆机构,以 1 为主动件,则机构的传动角 = 。 A.∠ A B.∠ B C.0° D.90°
三、作图题 (每小题 5 分,共 10 分) (注意:以下作图题均要求在答题册上画图)
1. 如图 2 所示曲柄滑块机构,曲柄 AB 等速整周回转,设曲柄为主动件,作图画出极位夹角
,最小传动角 min 出现的位置。 (5 分)
B
A
e
C
图 2 曲柄滑块机构
注:1、教师命题时题目之间不留空白; 2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考 生须在试题图上作解答,请另附该试题图。3、请在试卷类型、考试方式后打勾注明。 (第 2 页)
武汉科技大学819机械原理2018——2020年考研真题都有答案试卷试题
D.不变;减小
8. 若忽略摩擦,一对渐开线齿廓从进入啮合到退出啮合,齿廓间作用力方向
。
A. 沿啮合线方向
B. 沿两分度圆内公切线方向
C. 沿两轮连心线方向
D. 沿两节圆内公切线方向
9. 以下参数
不是标准值。
A.斜齿轮法面模数 B. 蜗杆直径 C. 蜗轮直径 D. 锥齿轮大端模数
10.飞轮调速是因为它能
三、填空题(共 9 小题,每空 1 分,共 15 分)
1.对心曲柄滑块机构,若以曲柄为机架,则该机构演化为
机构。
பைடு நூலகம்
2.建立机械的等效动力学模型时,等效力、等效力矩是根据
的原理求解;
等效质量、等效转动惯量是根据
的原理求解。
3. 在同样条件下,三角形螺纹的摩擦力
矩形螺纹的摩擦力,因此它多用
于
。
4.现需加工一渐开线标准直齿圆柱齿轮,齿数 z = 30,用仿形法加工该齿轮时,选
和 上形成的。
9. 考虑摩擦后,要完全确定移动副反力需要求两个未知量:即力的 和
。
四、分析与作图题(共 3 小题,每小题 10 分,共 30 分)
1.(本小题
10
分)已知运动链代号:
N
1 3
—001,
N32
—001,
N
3 3
—012,
N
4 3
—012。
试: (1)画出运动链的结构图; (5 分) (2)取三元连杆为机架,试变换出一原动件含高副、执行构件为滑块的机构。(5 分)
2020 年全国硕士研究生招生考试初试自命题试题 ( A 卷)
科目代码: 819 科目名称: 机械原理
注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考 完后试题随答题纸交回。
武汉科技大学819机械原理2007—2018年(07-09.11-18年含答案)考研真题试卷
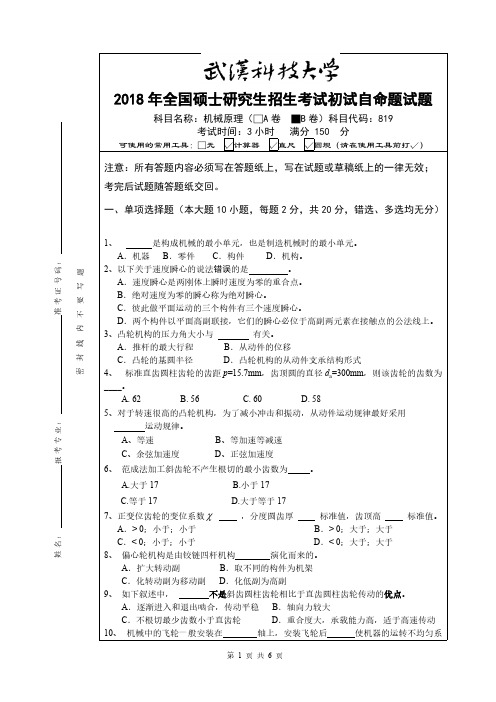
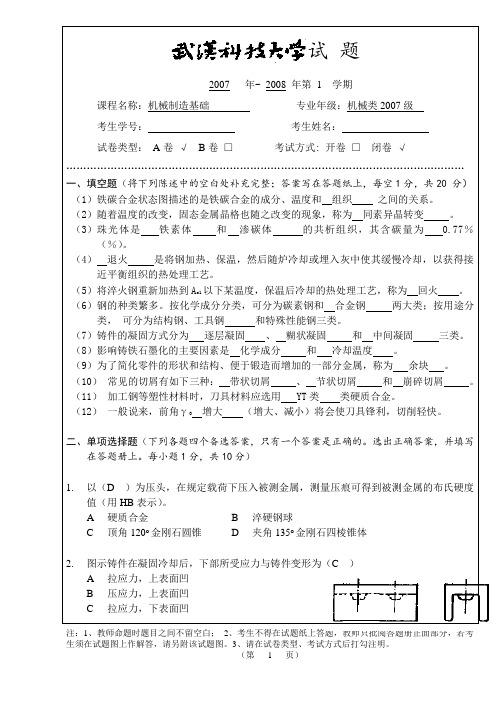
图5 4、(本小题 10 分)图 6 所示的平面四杆机构中,各杆长度为 a = 30mm,b = 60mm,c
= 75mm,d = 80mm,试求:(1)机构的最大传动角、最大压力角。(5 分)(2)若 机构的极位夹角为 22°,求行程速比系数。(5 分)
C
b
B
a
A
d
c
D 图6
5、(本小题 15 分)某机器上有一对标准安装的外啮合渐开线标准直齿圆柱齿轮机构,
(2)在图上标出机构的压力角。(2 分) (3)对图中机构进行高副低代,画出机构的低副运动等效机构。(4 分)
第2页共6页
图2
3、(本小题 10 分)运动链代号:N31—022, N32—002,N41—0222,要求:
(1)画出运动链的结构图。(5 分) (2)取四元连杆为机架,试变换出一个原动件为齿轮,执行构件为滑块的机构。(5 分)
9、 如下叙述中,
不是斜齿圆柱齿轮相比于直齿圆柱齿轮传动的优点。
A.逐渐进入和退出啮合,传动平稳 B.轴向力较大
C.不根切最少齿数小于直齿轮
D.重合度大,承载能力高,适于高速传动
10、 机械中的飞轮一般安装在
轴上,安装飞轮后
使机器的运转不均匀系
第1页共6页
数为零。 A. 高速, 不能 C. 高速, 可以
4、(本小题 10 分)要求输入运动为匀速回转运动(电动机带动),输出运动为直线移
动,试设计四种不同的机构实现这一要求。要求机构为单自由度机构,且总的构件数 不超过 4 个,画出机构的运动简图即可。
四、计算与综合题(本大题70分) 1、(本小题 15 分)计算如图 3 所示的机构的自由度(5 分),将机构高副低代(5 分),
郑文纬《机械原理》配套题库【名校考研真题】(平面机构的力分析)【圣才出品】

(2)在图上标出当滑块 4 从最高位置到达图示位置时凸轮转过的角度 (要求写出作
图步骤,作图线条要画全、画清楚)。[东南大学 2004 研]
3 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 9-1 解:(1)各运动副中总反力的作用线如图 9-2 所示。
受力分析如图 9-10 所示,并对 4 杆分析并由各杆长度关系即可得到 Q 与 F 的关系。
4.图 9-8 所示为肘杆式夹钳,设所有转动副的摩擦圆半径均为 ,F 为驱动力,Q 为
钳口剪力。调整螺丝为右旋螺纹。 (1)画出机构在图示位置各个运动副反力的方向。 (2)如何确定力 F 和力 Q 大小之间的关系。 (3)在力 F 和 Q 作用点、方向均不变的条件下,为了提供大小相同的力 Q 而减小力 F,
【答案】对
4.平面摩擦的总反力方向恒与运动方向成一钝角。( )[武汉科技大学 2007 研] 【答案】对
四、简答题 何谓当量摩擦系数?它的作用是什么?[西北工业大学 2001 研]
2 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
解:(1)当量摩擦系数是原始摩擦系数与不同接触形状而引入的摩擦力增大系数之乘 积。
4 / 14
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 9-2 (2)滑块 4 最高位置即当杆 2 右部分与杆 3 重合(图示竖直位置)时。将凸轮依其转
动中心转至图示位置即可知凸轮转过的角度 如图。 2.图 9-3 所示曲柄滑块机构运动简图。又知各转动副轴颈半径 r 20mm ,当量摩擦
( 0 )
2.螺旋副的自锁条件是_________,转动副的自锁条件是_________。[湖南大学 2005 研]
机械原理试卷(手动组卷)3
武汉科技大学《机械原理》题目部分,☎卷面共有 题 分 各大题标有题量和总分✆一、填空题☎小题 共 分✆.☎分✆在认为摩擦力达极限值条件下计算出机构效率η 后,则从这种效率观点考虑,机器发生自锁的条件是。
.☎分✆ 所 谓 静 力 分 析 是 指 的一种力分析方 法 ,它 一 般 适 用 于 情 况。
.☎分✆ 所 谓 动 态 静 力 分 析 是 指 的 一 种 力 分 析 方 法, 它 一 般 适 用 于 情 况。
.☎分✆ 对 机 构 进 行 力 分 析 的 目 的 是:☎✆ ;☎✆。
.☎分✆ 绕 通 过 质 心 并 垂 直 于 运 动 平 面 的 轴 线 作 等 速 转 动 的 平 面 运 动 构 件, 其 惯 性 力P I=,M 。
在 运 动 平 面 中 的惯 性 力 偶 矩I.☎分✆在滑动摩擦系数相同条件下,槽面摩擦比平面摩擦大,其原因是。
.☎分✆机械中三角带传动比平型带传动用得更为广泛 从摩擦角度来看 其主要原因是 。
.☎分✆设机 器 中 的 实 际 驱 动 力 为P, 在同 样 的 工 作P, 则 机 器 阻 力 和 不 考 虑 摩 擦 时 的 理 想 驱 动 力 为效 率 的 计 算 式 是η 。
.☎分✆ 设 机 器 中 的 实 际 生 产 阻 力 为Q ,在 同 样 的驱 动 力 作 用 下 不 考 虑 摩 擦 时 能 克 服 的 理 想 生 产阻 力 为 0Q 则 机 器 效 率 的 计 算 式是 η= 。
.☎分✆ 在 认 为 摩 擦 力 达 极 限 值 条 件 下 计 算出 机 构 效 率η 后, 则 从 这 种 效 率 观 点 考 虑, 机 器 发 生 自 锁 的 条 件 是 。
.☎分✆ 设 螺 纹 的 升 角为λ, 接 触 面 的 当 量 摩 擦 系数 为v f ,则 螺 旋 副 自 锁 的 条 件 是 。
二、选择题☎小题 共 分✆.☎分✆ 右图所示平面接触移动副,rQ 为法向作用力,滑块在r P 力作用下沿v方向运动,则固定件给滑块的总反力应是图中 所示的作用线和方向。
武汉科技大学2007级机制基础A试卷
注:1、教师命题时题目之间不留空白;2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考
A B C D
45钢的锻造温度范围是(B )
A 1200-800℃
B 900-700℃
C 1500-900℃
D 1300℃以上
对球墨铸铁进行正火处理的目的是(
A 为了获得珠光体基体
B 细化分布于基体的石墨球
C 为了获得铁素体基体
D 细化晶粒,均匀组织
在切削用量三要素中,对刀具耐用度影响最大的因素是
注:1、教师命题时题目之间不留空白;2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考
注:1、教师命题时题目之间不留空白;2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考
(2)已知车刀的各主要角度如下:γ=5°,α=5°,Kr=90°,Kr’=15°,λs=0°。
注:1、教师命题时题目之间不留空白;2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考
注:1、教师命题时题目之间不留空白;2、考生不得在试题纸上答题,教师只批阅答题册正面部分,若考。
机械原理801考研真题_填空,选择,简答题

填空题1.由M个构件组成的复合铰链应包括_____个运动副。
【武汉科技大学】2.在平面中,不受约束的构件自由度数等于_____,两构件组成移动副后的相对自由度等于_____。
【武汉理工大学】3.在机构中按给定的已知运动规律运动的构件称为_____;使机构的位置得以确定必须给定的独立广义坐标的数目称为是_____;为了使机构具有确定的运动,应使_____。
【西北工业大学】4.高副低代必须满足的条件是_____。
【青岛大学2010】5.运动链与机构的区别是_____。
【华东理工大学2005】6.根据机构的组成原理,任何机构都可以看成是由_____、_____以及_____所组成。
【重庆大学2004】7.铰链五杆机构是_____级机构【湖南大学2005】8.相对瞬心与绝对瞬心的相同点是_____,不同点是_____;在由N个构件组成的机构中,有_____个相对瞬心,有_____个绝对瞬心。
【西北工业大学】9.速度瞬心是两构件上的瞬时相对速度为_____,瞬时绝对速度_____的重合点。
【山东大学2005】10.下图所示两种情况下,载荷Q及摩擦系数f均相同,则转动件1时所需力矩为M1_____M2。
(填<、=或>)。
【清华大学】11.移动副的自锁条件是_____;转动副的自锁条件是_____;从效率的观点出发,机械的自锁条件是_____。
【哈尔滨工业大学2004】12.下两图所示转子中,S为总质心,图1中的转子具有_____不平衡,图2中的转子具有_____不平衡。
【哈尔滨工业大学2004】13.质径积是指转子的_____与_____的乘积;残余不平衡质径积相同,但质量不同的转子,质量_____的转子的平衡精度高。
【湖南大学2005】14.某机器主轴平均角速度ωm=100rad/s,机器运转的速度不均匀系数δ=0.05,则该机器的最大角度ωmax等于_____rad/s,最小角速度ωmin等于_____rad/s。
武汉科技大学机械原理习题集参考答案解析
第二章 机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运43512解答:原机构自由度F=3⨯3- 2 ⨯4-1 = 0,不合理2-3 图2-3913为滑块;4为滑杆;5为齿轮及凸轮;6为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b) 解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:①当未刹车时,F=3⨯6-2 ⨯8=2②在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG和车轮接触成为一体,位置保持不变,可看作为机架。
③完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG、HIJ和车轮接触成为一体,位置保持不变,可看作为机架。
2-9 先计算图2-45~图2-50所示平面机构的自由度。
再将其中的高副化为低副,确定机构所含杆组的数目和级别,以及机构的级别。