《结构力学习题集》4-静定位移
《结构力学习题》含答案解析
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.C.=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a、b两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ。
8、图示桁架各杆E A相同,结点A和结点B的竖向位移均为零。
a a9、图示桁架各杆EA =常数,由于荷载P是反对称性质的,故结点B的竖向位移等于零。
二、计算题:10、求图示结构铰A两侧截面的相对转角ϕA,EI = 常数。
ql l l/211、求图示静定梁D端的竖向位移∆DV。
EI=常数,a= 2m 。
a a a10kN/m12、求图示结构E点的竖向位移。
EI=常数。
ll l l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D 点的竖向位移。
EI = 常数 。
l/217、求图示刚架横梁中D点的竖向位移。
EI = 常数。
18、求图示刚架中D点的竖向位移。
EI =常数。
qll l/2219、求图示结构A、B两截面的相对转角,EI=常数。
l/23l/320、求图示结构A、B两点的相对水平位移,E I= 常数。
ll21、求图示结构B点的竖向位移,EI =常数。
l lﻩ22、图示结构充满水后,求A、B两点的相对水平位移。
《结构力学》第四章 静定结构的位移计算 (3)
B EI
2
R 1
cos
( FP R
sin
)
Rd
0
EI
d
FPR3
2EI
FPk 1
A
B Bx 2 By 2
B kP
B
A M k M P ds B EI
2
(1)
(FPR sin
)
Rd
0
EI
R
O
FP R2 (
)
EI
(1)梁与刚架
三、结构的外力虚功
作用在结构上的外力可能是单个的集中力、力 偶、均布力,也可能是一个复杂的力系,为了 书写方便,通常将外力系的总虚功记为:
W = Fk × km
其中,Fk为作功的力或力系,称为广义力; km为广义力作功的位移,称为广义位移。 下面讨论几种常见广义力的虚功。
1) 集中力的虚功
Pk
k
M
4EIk
GAl 2
kP
若截面为矩形,则:A bh, I bh3 /12,k 6 l 1, 2
h / l 1 , 10
h/l 1 , 15
则:
Q kP
( h)2
Q
M kP
l
kP 25% kMP
对于粗短杆来说,剪 切变形产生的位移不可忽
Q
kP 1%
1
m
ds
第i根杆件静力状态上的力在位移状态的位移上所 作的虚功:
Vi
s FNk
mds
s FQk mds
s Mk
1
m
ds
整个杆件结构各个截面上的内力在位移状态的位 移上的所作的总虚功:
N
N
N
结构力学-第四章-结构位移计算-2
位移状态 (实际状态)
MP A ql 2
(2)写出各杆单位力作用下的弯矩方程式,画出弯矩图 横梁BC 竖柱CA
M ( x) a (0 x a )
ΔBV
o a
a B C
力状态 (虚设状态)
MMP dx EI 5 qa 4 1 1 4 1 3 x a x () 4 2 2 8 EI o
F N FNP Δ dx EA
桁架各杆均为等截面直杆则
F N FNP l Δ EA
§4-4 静定结构在荷载作用下的位移计算
(3)组合结构
F N FNP l MMP Δ ds EI EA
(4) 跨度较大的薄拱,其轴力和弯矩的影响相当,剪力 的影响不计,位移计算公式为
ql / 4
§4-5 图乘法
例9.图示结构 EI 为常数,求AB两点(1)相对竖向位 移,(2)相对水平位移,(3)相对转角 。 Pl P yc P ABY 对称结构的对称弯矩图与 EI A B 其反对称弯矩图图乘 ,结果 l 1 1 2 MP ( 为零 l Pl . l 4 l Pl l 2) EI 2 3 反对称弯矩图 l l 10 Pl3 1 1 () l 3 EI yc y c Mi 0 AB 0 ABX EI EI
C
§4-5 图乘法
ql2 / 2
MP
q ql2 / 8
A
B
A y c C l/2 l/2 c EI l/2 1 1 2 l ql 2 1 l 1 l ql 2 2 l ( M C EI 3 2 32 2 2 2 2 2 3 2 q 2 2 2 1 l ql 1 l ql / 2 ql / 8 ) 2 2 8 3 2 4 2 17 ql ql / 32 () 2 ql / 2 384 EI ql2 / 8
结构力学——静定结构位移计算 ppt课件

要求: 领会变形体虚功原理和互等定理。 掌握实功、虚功、广义力、广义位移的概念。 熟练荷载产生的结构位移计算。 熟练掌握图乘法求位移。
第一节 位移计算概述
1、结构的位移
杆系结构在外界因素作用下会产生变形和位移。
• 变形 是指结构原有形状和尺寸的改变; • 位移 是指结构上各点位置产生的变化
线位移(位置移动) 角位移(截面转动)。
5
G0.4E
则:
ΔAV85qE4lI171501150
第三节 位移计算公式
各类结构的位移计算公式
荷载引起的位
1、梁和刚架:
ΔiP
MMPds EI
移与杆件的绝 对刚度值有关
2、桁
架: ΔiP
FNFNdPs FNFNlP
EA
EA
3、组合结构:
Δ kP
M M Pds EI
F N F Nd Ps EA
任何一个处于平衡状态的变形体,当发生任意一个虚位移 时,变形体所受外力在虚位移上所作的总虚功 We恒等于 变形体各微段外力在微段变形上作的虚功之和 Wi。
也即恒有如下虚功方程成立:
We = Wi
第二节 变形体虚功原理 变形体虚功原理的必要性证明:
力状态
位移状态
(满足平衡条件)
(满足约束条件)
刚体位移
4、拱结构:
《结构力学习题》(含答案解析)
《结构力学习题》(含答案解析)-CAL-FENGHAI.-(YICAI)-Company One120 第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;; B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p 21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
Aa a21 9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
q l l l /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a 10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
l l l l /3 2 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m 3m 3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI =常数。
l ll/217、求图示刚架横梁中D点的竖向位移。
EI=常数。
18、求图示刚架中D点的竖向位移。
E I = 常数。
qll l/219、求图示结构A、B两截面的相对转角,EI=常数。
结构力学——静定结构的位移计算 免费
t10C, t2 0C —内、外侧温度的改变
1 kt Mdt Ndut
du t , dt —实变形,温度不引起剪切变形
ⅰ)对称截面
u 2
u1
第三节 温度位移
轴向伸长(内、外表面纤维)
u1 t1ds 杆轴处伸长: u2 t2ds
杆轴处的平均温度
ⅱ) 不对称截面
t轴
MP
dP
MP dS EI
QP
dP
QP dS GA
第一节 一般荷载作用下的位移计算公式
外力虚功: Pk kP (虚外力在实位移上作的虚功) 内力虚功:
MdP NduP QdP
(虚内力在实变形上作的虚功)
1 kP
MMPdS EI
NNPdS EA
k
QQPdS GA
则
MMPdS EI
NNPdS EA
第三节 温度位移
公式符号判断规则
• t轴,t可用绝对值代入
•若为正t,引反起之的为杆负件弯曲变形方向和由 M 引起的弯曲方向一致
•若 t轴 引起的杆件轴向伸缩和由 N 引起的杆件轴向伸缩一致
为正,反之为负
例1-2:求图示刚架因温度产生的竖向位移ct ,设内测温升100 C,
AB杆外侧升高 200C,BC杆外侧无变化,各杆截面 h 16cm,
L 4m, 105
B t1 200C C
BL
1
1B
1
C
C
t2 100C
M
N
A
A
A
第三节 温度位移
AB段: t轴
10 20 2
150 C, t
t1 t2
100 C
BC段:
结构力学 静定结构的位移

FR i ci
N
无支座移动
M d F
d FQ d
虚功原理求位移的关键:
虚设相应的力系
1. C点竖向线位移
2. D点水平线位移
3.铰C左右截面的相对角位移
D
C
l
A b
l 2 l 2
B
a
B
P
C
l
A D
1.求D点的水平、竖向 位移
C
0
A
0 l
D
0
A
0 l
D 1/l
0
l
-1/l
l
CD
P EA
本章重点: 图乘法求梁和 刚架的位移
D
l
A C B
l
l
已知:每根杆的抗拉刚度均为EA, 1.求D点的水平、竖向位移 0.207 P 2.求BD杆的角位移 EA
梁和刚架在荷载下的位移计算
M MP ds EI
E
Pl
l
求:1. B点的水平位移和角位移
2. D点的水平位移
ql ql
2
q
B
C
EI=常数
D
l
A
l l
求:1.
2.
ql2
C、D两点的相对水平位移
A、D两点的相对角位移
B
C
EI
q
l
A
l
D
q ql
2
已知:EI=常数.求: 1.C点的竖向位移和
l
D
C
E
铰C左右截面的相对角位移
2.D点的水平位移和角位移
已知:
C 梁式杆的EI=常数,
《结构力学》课后习题答案__重庆大学出版社

第1章 绪论(无习题)第2章 平面体系的几何组成分析习题解答习题2.1 是非判断题(1) 若平面体系的实际自由度为零,则该体系一定为几何不变体系。
( )(2) 若平面体系的计算自由度W =0,则该体系一定为无多余约束的几何不变体系。
( ) (3) 若平面体系的计算自由度W <0,则该体系为有多余约束的几何不变体系。
( ) (4) 由三个铰两两相连的三刚片组成几何不变体系且无多余约束。
( )(5) 习题2.1(5) 图所示体系去掉二元体CEF 后,剩余部分为简支刚架,所以原体系为无多余约束的几何不变体系。
( )B DACEF习题 2.1(5)图(6) 习题2.1(6)(a)图所示体系去掉二元体ABC 后,成为习题2.1(6) (b)图,故原体系是几何可变体系。
( )(7) 习题2.1(6)(a)图所示体系去掉二元体EDF 后,成为习题2.1(6) (c)图,故原体系是几何可变体系。
()(a)(b)(c)AEBFCD习题 2.1(6)图【解】(1)正确。
(2)错误。
0W 是使体系成为几何不变的必要条件而非充分条件。
(3)错误。
(4)错误。
只有当三个铰不共线时,该题的结论才是正确的。
(5)错误。
CEF 不是二元体。
(6)错误。
ABC 不是二元体。
(7)错误。
EDF 不是二元体。
习题2.2 填空(1) 习题2.2(1)图所示体系为_________体系。
习题2.2(1)图(2) 习题2.2(2)图所示体系为__________体系。
习题2-2(2)图(3) 习题 2.2(3)图所示4个体系的多余约束数目分别为_______、________、__________、__________。
习题2.2(3)图(4) 习题2.2(4)图所示体系的多余约束个数为___________。
习题2.2(4)图(5) 习题2.2(5)图所示体系的多余约束个数为___________。
习题2.2(5)图(6) 习题2.2(6)图所示体系为_________体系,有_________个多余约束。
《结构力学习题集》(含答案)
第三章 静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.M C.=1=1=15、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M kM p21y 1y 2**ωω( a )M =17、图a 、b 两种状态中,粱的转角ϕ与竖向位移δ间的关系为:δ=ϕ 。
8、图示桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
aa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰A 两侧截面的相对转角ϕA ,EI = 常数。
qlll /211、求图示静定梁D 端的竖向位移 ∆DV 。
EI = 常数 ,a = 2m 。
a a a10kN/m12、求图示结构E 点的竖向位移。
EI = 常数 。
ll l l /32 /3/3q13、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m14、求图示刚架B 端的竖向位移。
q15、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q16、求图示刚架中D点的竖向位移。
EI = 常数 。
l/217、求图示刚架横梁中D点的竖向位移。
EI = 常数 。
18、求图示刚架中D 点的竖向位移。
E I = 常数 。
qll/219、求图示结构A、B两截面的相对转角,EI = 常数 。
l/23l/320、求图示结构A 、B 两点的相对水平位移,E I = 常数。
ll21、求图示结构B 点的竖向位移,EI = 常数。
结构力学 第4章 静定结构的位计算

例如,图1(a)所示两个梯形应用图乘法,可不必求 梯形的形心位置,而将其中一个梯形(设为MP图)分成 两个三角形,分别图乘后再叠加。
图1
对于图2所示由于均布荷载q所引起的MP图,可以 把它看作是两端弯矩竖标所连成的梯形ABDC与相应简
支梁在均布荷载作用下的弯矩图叠加而成。
四、几种常见图形的面积和形心的位置
零。
P
2Δ
PP2P30
22
2
YA P/2
YB P/2
2.变形体系的虚功原理 We Wi
体系在任意平衡力系作用下,给体系以几何可能的
位移和变形,体系上所有外力所作的虚功总和恒等于体
系各截面所有内力在微段变形位移上作的虚功总和。
说明: (1)虚功原理里存在两个状态:力状态必须满足平衡条件;位移状态
PR3 PRk PR
4EI 4EA 4GA
M N Q
P θ
P=1
钢筋混凝土结构G≈0.4E 矩形截面,k=1.2,I/A=h2/12
Q M
kGEAI2R14Rh2
N M
I AR2
1 h2 12R
如 h 1 , 则Q 1 , N 1
1
EA 2(1 2)Pa()
1 2
1
EA
2
1
例3.求图示1/4圆弧曲杆顶点的竖向位移Δ。
解:1)虚拟单位荷载
2)实际荷载
虚拟荷载
ds
M P PR sin
M R sin
QP P cos
Q cos
dθ
N P P sin
N sin
d d ds d
d dd sd sN Pds
结构力学静定结构位移计算

R iCi
Ri的正向与Ci的正向一致
它是 Maxwell, 1864和Mohr, 1874提出, 故也称为Maxwell-Mohr Method
截面转角
相对线位移
相对转角
Δ
P=1
1/2
1/2
(三)计算步骤:
➢ 根据拟求位移作单位力状态 ➢ 求单位力作用下的支反力 ➢ 利用公式求位移
R iCi
2)作虚功的力系为一个集中力偶
M
T M
4)作虚功的力系为两个等值 反向的集中力偶
M
M
A
B
T M A M B M ( A B ) M AB
(二)实功(Real Work)和虚功 (Virtual Work)
图(a)中P1所作的功为:T11
1 2
P111
实功
△11
图(b)中P2所作的功为:T22
变形体系在外力作用下处于平衡状态的充要条件是: 对于任意给定的虚位移,外力虚功等于内力虚功
即 T12=W12
说明:
(1)受力状态和变形状态是相互独立的,二者彼此无关。 (2)第一状态要求平衡(内力并不一定是真实的)
第二状态要求虚位移条件 (3)变形体虚功原理是变形体力学的普遍原理。 (4)刚体虚功原理是特殊情况,即内力虚功为零的情况。
1 2
P2 22
图(c)中先作用P1,此时P1所作的功为: 第一个下标表示位移的地点和方向
1 T11 2 P111 再作用P2,此时P2所作的功为:T22
1 2
第二个下标表示产生位移的原因
△22
P2 22
P1 在加P2过程中也做功,此时P1继续作功为:
P2
T12 P112
虚功
结构力学课后练习题+答案

2cm
A CB 2cm 2cm
42、求图示结构 A 点竖向位移(向上为正) AV 。
M EI
EI A
a
EI
EI = ∞ 1
3 EI
K = a3
a
a
43、求图示结构 C 点水平位移 CH ,EI = 常数。
M B
2l
C 6 EI k=
l3
A l
44、求图示结构 D 点水平位移 DH 。EI= 常数。
a/ 2 D
a
A
c1
A'
a
B B'
aห้องสมุดไป่ตู้
c2
35、图示结构 B 支座沉陷 = 0.01m ,求 C 点的水平位移。
C l
A
B
l/2 l/2
—— 25 ——
《结构力学》习题集
36、结构的支座 A 发生了转角 和竖向位移 如图所示,计算 D 点的竖向位移。
A
D
l
l l/ 2
37、图示刚架 A 支座下沉 0.01l ,又顺时针转动 0.015 rad ,求 D 截面的角位移。
P
P
l
l
l
l
18、用力法计算图示结构并作弯矩图。
—— 31 ——
100 kN C EI
《结构力学》习题集
100 kN D
2 EI A
2 EI
4m
B
1m
6m
1m
19、已知 EI = 常数,用力法计算并作图示对称结构的 M 图。
q
q
EA=
l
l
l
20、用力法计算并作图示结构的 M 图。EI =常数。
a
P q
结构力学课后练习题+答案
第三章 静定结构的位移计算
一、判断题:
1、虚位移原理等价于变形谐调条件,可用于求体系的位移。 2、按虚力原理所建立的虚功方程等价于几何方程。 3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内 力,但会有位移且位移只与杆件相对刚度有关。 4、求图示梁铰 C 左侧截面的转角时,其虚拟状态应取:
P 2I
I
I
6m
2I
I
I
6m
8m
25、用力法计算图示结构并作 M 图。EI =常数。
20 kN
4m
3m
4m
3m
26、用力法计算图示结构并作 M 图。EI =常数。
P
P
l
l /2 l /2
l
l /2 l /2
27、利用对称性简化图示结构,建立力法基本结构(画上基本未知量)。E =常数。
—— 33 ——
B A
l
2l
23、求图示刚架 C 点的水平位移 CH ,各杆 EI = 常数 。
2kN/m C
3m
4m
4m
24、求图示刚架 B 的水平位移 BH ,各杆 EI = 常数 。
7kN/m
B
q
4m
3m 4m
25、求图示结构 C 截面转角。已知 :q=10kN/m , P=10kN , EI = 常数 。
8、用力法作图示结构的 M 图。
28 kN 3
C
4kN/m
EI 3m
A
EI
B
3m
9、用力法作图示排架的 M 图。已知 A = 0.2 m2 ,I = 0.05 m4 ,弹性模量为 E0 。
—— 29 ——
结构力学4静定结构的位移计算习题解答

第4章 静定结构的位移计算习题解答习题 是非判定题(1) 变形体虚功原理仅适用于弹性体系,不适用于非弹性体系。
( ) (2) 虚功原理中的力状态和位移状态都是虚设的。
( )(3) 功的互等定理仅适用于线弹性体系,不适用于非线弹性体系。
( ) (4) 反力互等定理仅适用于超静定结构,不适用于静定结构。
( ) (5) 关于静定结构,有变形就必然有内力。
( ) (6) 关于静定结构,有位移就必然有变形。
( )(7) 习题(7)图所示体系中各杆EA 相同,那么两图中C 点的水平位移相等。
( ) (8) M P 图,M 图如习题(8)图所示,EI =常数。
以下图乘结果是正确的:4)832(12ll ql EI ⨯⨯⨯ ( )(9) M P 图、M 图如习题(9)图所示,以下图乘结果是正确的:033202201111)(1y A EI y A y A EI ++ ( )(10) 习题(10)图所示结构的两个平稳状态中,有一个为温度转变,现在功的互等定理不成立。
( )(a)(b)习题 (7)图图(b)M图(a)M P 81qM 图(b)P M 图(a)习题 (8)图 习题 (9)图(a)P习题 (10)图【解】(1)错误。
变形体虚功原理适用于弹性和非弹性的所有体系。
(2)错误。
只有一个状态是虚设的。
(3)正确。
(4)错误。
反力互等定理适用于线弹性的静定和超静定结构。
(5)错误。
譬如静定结构在温度转变作用下,有变形但没有内力。
(6)错误。
譬如静定结构在支座移动作用下,有位移但没有变形。
(7)正确。
由桁架的位移计算公式可知。
(8)错误。
由于取0y 的M 图为折线图,应分段图乘。
(9)正确。
(10)正确。
习题 填空题(1) 习题(1)图所示刚架,由于支座B 下沉∆所引发D 点的水平位移∆D H =______。
(2) 虚功原理有两种不同的应用形式,即_______原理和_______原理。
其中,用于求位移的是_______原理。
静定结构位移计算典型例题(附详细解题过程)
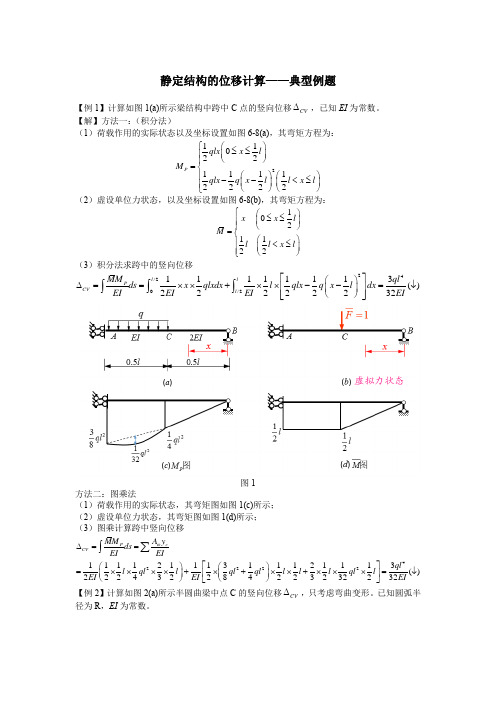
静定结构的位移计算——典型例题【例1】计算如图1(a)所示梁结构中跨中C 点的竖向位移,已知EI 为常数。
【解】方法一:(积分法)(1)荷载作用的实际状态以及坐标设置如图6-8(a),其弯矩方程为:(2)虚设单位力状态,以及坐标设置如图6-8(b),其弯矩方程为:(3)积分法求跨中的竖向位移图1方法二:图乘法(1)荷载作用的实际状态,其弯矩图如图1(c)所示; (2)虚设单位力状态,其弯矩图如图1(d)所示; (3)图乘计算跨中竖向位移【例2】计算如图2(a)所示半圆曲梁中点C 的竖向位移,只考虑弯曲变形。
已知圆弧半径为R ,EI 为常数。
CV ∆21102211112222P qlx x l M qlx q x l l x l ⎧⎛⎫≤≤ ⎪⎪⎝⎭⎪=⎨⎛⎫⎛⎫⎪--<≤ ⎪ ⎪⎪⎝⎭⎝⎭⎩1021122x x l M l l x l ⎧⎛⎫≤≤ ⎪⎪⎪⎝⎭=⎨⎛⎫⎪<≤ ⎪⎪⎝⎭⎩24/20/211111113()22222232l l P CVl MM ql ds x qlxdx l qlx q x l dx EI EI EI EI ⎡⎤⎛⎫∆==⨯⨯+⨯⨯--=↓⎢⎥ ⎪⎝⎭⎢⎥⎣⎦⎰⎰⎰4222211112111311121113()222432284223232232cPCV A y MM ds EI EI ql l ql l ql ql l l l ql l EI EI EI ω∆==⎡⎤⎛⎫⎛⎫=⨯⨯⨯⨯+⨯+⨯⨯+⨯⨯⨯=↓ ⎪ ⎪⎢⎥⎝⎭⎝⎭⎣⎦∑⎰CV ∆图2【解】(1)实际荷载作用下,以任意半径与x 轴的顺时针夹角θ为自变量(图2a ),弯矩方程为(截面内侧受拉为正):(2)虚设单位荷载状态如图2(b)所示,其弯矩方程为:(3)积分法求跨中的竖向位移【例3】如图3(a)所示梁的EI 为常数,在荷载F 作用下测得结点E 的竖向位移为9mm (向下),求截面B 处的角位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章 静定结构位移计算一、是非题1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、用图乘法可求得各种结构在荷载作用下的位移。
5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
M k M p21y 1y 2**ωω7、图示桁架各杆EA 相同,结点A 和结点B 的竖向位移均为零。
A8、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
aa9、图示简支梁,当P 11=,P 20=时,1点的挠度为0.01653l EI /,2点挠度为0.0773l EI /。
当P 10=,P 21=时,则1点的挠度为0.0213l EI /。
( )l10、图示为刚架的虚设力系,按此力系及位移计算公式即可求出杆AC 的转角。
C1P11、图示梁AB 在所示荷载作用下的M图面积为ql 33。
lAl /212、图示桁架结点C水平位移不等于零。
13、图示桁架中,结点C 与结点D 的竖向位移相等。
二、选择题1、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.M C.=1=1=12、图示结构A 截面转角(设顺时针为正)为:A.22Pa EI / ;B.-Pa EI 2/ ;C.542Pa EI /() ;D.-542Pa EI /() 。
aa3、图示刚架l a >>0 , B 点的水平位移是:A .不定,方向取决于a 的大小;B .向左;C .等于零;D .向右。
4、图示静定多跨粱,当EI 2增大时,D 点挠度:A .不定,取决于EI EI 12;B .减小;C .不变;D .增大。
5、图示刚架中杆长l ,EI 相同,A 点的水平位移为:A.()2302M l EI /→;B.()M l EI 023/→;C.()2302M l EI /←;D.()023M l EI /←。
M A6、图示为结构在荷载作用下的M P 图,各杆EI =常 数,支座B 截面处的转角为: A. 16/(EI ) ( 顺 时 针 ); B. 0;C. 8/(EI ) ( 顺 时 针 );D. 18/(EI ) ( 顺 时 针 )。
12kN.m7、图示桁架各杆EA =常数,则结点K 的水平位移(→)等于: A .2( 1+2 )Pa / (EA ) ; B .( 4Pa ) / (EA ) ;C .( 2+2 )Pa / ( EA ) ;D . ( 3Pa ) / (EA ) 。
a8、图示结构的受弯杆件的抗弯刚度为EI ,链杆的抗拉(压)刚度为EA ,且A=I /( 30m 2 ), 则D 端的转角(顺时针方向)为:A. 223 /( 3EI ) ;B. 137 / ( 3EI ) ;C. 4673 / ( 3EI ) ;D. 1500 / ( EI ) 。
3m 2m9、图示桁架,由于制造误差,AE 杆过长了1cm ,BE 杆过短1cm ,结点E 的竖向位移为:A. 0;B. 0.05cm (↓);C. 0.707cm (↓);D. 1.0cm (↓) 。
A CB E2cm2cm2cm10理r r 1221=,r 12和r 21的量纲为: A.力 ; B.无量纲 ;C.力/长度 ;状 态 (1)∆1=1状 态(2)r ∆2=1三、填充题1、图示刚架材料膨胀线系数为α,各杆为矩形截面,h l =/,20在图示温度变化情况下,B 、C 两点的竖向相对位移为________________。
lBA +-2t t 3t-3t -3t -2、欲使A 点的竖向位移与正确位置相比误差不超过0.6 cm ,杆BC 长度的最大误差λmax =_______________ , 设其它各杆保持精确长度。
1.5m 1.5mABDC四、计算题1、求图示结构铰A两侧截面的相对转角ϕA ,EI = 常数。
qlll /22、求图示静定梁D 端的竖向位移∆DV 。
EI = 常数 ,a = 2m 。
aaa10kN/m3、求图示结构E 点的竖向位移。
EI = 常数 。
ll l /32 /3/3q4、图示结构,EI=常数 ,M =⋅90kN m , P = 30kN 。
求D 点的竖向位移。
P 3m3m3m5、求图示刚架B 端的竖向位移。
q6、求图示刚架结点C 的转角和水平位移,EI = 常数 。
q7、求图示刚架中D点的竖向位移。
EI = 常数 。
lll/28、求图示刚架横梁中D点的竖向位移。
EI = 常数 。
9、求图示刚架中D 点的竖向位移。
E I = 常数 。
qlll/l/2210、求图示结构A、B两截面的相对转角,EI = 常数 。
l/23l/311、求图示结构A 、B 两点的相对水平位移,E I = 常数。
ll12、求图示结构B 点的竖向位移,EI = 常数 。
ll13、图示结构充满水后,求A 、B 两点的相对水平位移。
E I = 常数 ,垂直纸面取1 m 宽,水比重近似值取10 kN / m 3。
14、求图示刚架C 点的水平位移 ∆CH ,各杆EI = 常数 。
4m4m3m 2kN/m15、求图示刚架B 的水平位移 ∆BH ,各杆 EI = 常数 。
3m 4m4mq7kN/m16、求图示结构C 截面转角。
已知 :q=10kN/m , P =10kN , EI = 常数 。
P17、求图示刚架中铰C 两侧截面的相对转角。
18、求图示桁架中D 点的水平位移,各杆EA 相同 。
a19、求图示桁架A 、B 两点间相对线位移 ∆AB ,EA=常数。
a一a一a一20、已知b abau u u u ]2/)([sin d cos sin 2⎰=,求圆弧曲梁B 点的水平位移,EI =常数。
A B R21、求图示结构D点的竖向位移,杆AD 的截面抗弯刚度为EI,杆BC的截面抗拉(压)刚度为EA。
a322、求图示结构D点的竖向位移,杆ACD 的截面抗弯刚度为EI,杆BC抗拉刚度为EA 。
23、求图示结构S杆的转角ϕS。
( EI = 常数,EA EI a=/2)。
aaa a24、刚架支座移动与转动如图,求D点的竖向位移。
a a/a//4002225、刚架支座移动如图,c1= a / 2 0 0 ,c2= a /3 0 0 ,求D点的竖向位移。
c2a a26、图示结构B支座沉陷∆= 0.01m ,求C点的水平位移。
27、结构的支座A发生了转角θ和竖向位移∆如图所示,计算D点的竖向位移。
θA Dl/l l228、图示刚架A支座下沉0.01l,又顺时针转动0.015 rad ,求D截面的角位移。
D0.015radAh0.01lll29、图示桁架各杆温度均匀升高t oC ,材料线膨胀系数为α,求C 点的竖向位移。
aaa30、图示刚架杆件截面为矩形,截面厚度为h , h/l = 1/ 20 ,材料线膨胀系数为 α,求C 点的竖向位移。
CA-3-3+t+t t tl31、求图示结构B 点的水平位移。
已知温变化t 110=℃,t 220=℃ ,矩形截面高h =0.5m ,线膨胀系数a = 1 / 105。
t 1t 2t 4mB132、图示桁架由于制造误差,AE 长了1cm ,BE 短了1 cm ,求点E 的竖向位移。
A CB E2cm2cm 2cm33、求图示结构A 点竖向位移∆AV 。
aaA34、求图示结构C 点水平位移∆CH ,EI = 常数。
2EIl 3=635、求图示结构D 点水平位移 ∆DH 。
EI= 常数。
l EI l =33lk36、BC 弹簧抗压刚度为 k ,其它各杆EA = 常数,求A 点的竖向位移。