基于凌阳单片机的跳舞机器人设计
基于凌阳MCU的机器人平衡控制系统设计
基于凌阳MCU的机器人平衡控制系统设计目录摘要 (3)第一章绪论 (4)第1.1节选题背景 (4)第1.2节本设计在理论和实际应用方面的价值 (4)第1.3节本文主要研究内容 (5)第二章凌阳单片机SPCE061A (6)第2.1节 SPCE061A单片机 (6)第2.2节 SPCE061A单片机的性能 (6)第2.3节 SPCE061A单片机的外观及结构 (7)第2.4节 SPCE061A单片机的输入/输出接口 (8)第2.4.1节 SPCE061A 的 I/O 端口结构 (8)第2.4.2节 SPCE061A并行I/O端口控制向量组合 (10)第2.5节 SPCE061A 的最小系统 (11)第三章传感器 (13)第3.1节传感器的原理 (13)第3.2节红外传感器 (13)第3.3节倾角传感器 (14)第四章系统的硬件设计 (17)第4.1节智能小车 (17)第4.2节智能小车硬件组成 (18)第4.3节智能小车各模块的选择 (18)第4.3.1节控制模块 (18)第4.3.2节电机及驱动模块 (19)第4.3.3节引导检测模块 (21)第4.3.4节平衡模块 (22)第4.3.5节电源及显示模块 (23)第五章系统的软件设计 (24)第5.1节小车控制算法 (24)第六章实验结果与分析 (30)第6.1节实验基础条件 (30)第6.2节实验数据及分析 (30)第6.3节智能小车运动性能的分析 (32)结论 (33)致谢 (34)参考文献 (35)附录 (36)摘要在现代社会的各个领域,机器人得到了十分广泛的应用,尤其是机器人小车,本设计是利用凌阳单片机SPCE061A、红外传感器电路TCRT5000、倾角传感器电路SCA60C、LCD 显示电路构成的电动小车跷跷板系统。
其中单片机最小系统SPCE061A作为检测和控制核心,通过红外发射和接收传感器TCRT5000完成对智能小车行进路线的控制,用红外传感器检测到开关信号送到单片机进行识别,进而发出相应控制指令控制小车寻线行驶;通过倾角传感器电路SCA60C完成跷跷板平衡控制,各部分都能实时显示,从而实现小车在跷跷板上寻找平衡点的智能化。
基于凌阳61板智慧机器人设计文档
物联网大赛参赛作品:智慧机器人参赛成员:学院:数学与计算机学院专业:计算机科学与技术指导教师:智慧机器人摘录:智能机器人是基于凌阳的SPCE061A芯片完成基本功能。
通过语音控制实现机器人的前进、后退、左转、右转、转头、跳舞和发射飞盘的功能。
软件设计方面,利用C语言在凌阳的IDE环境下实现函数调用。
从而方便的实现机器人的语音播放、控制运动等功能。
关键词:机器人,SPCE061A,单片机。
目录1.设计目标 (4)1.1 硬件设计 (4)1.2 软件设计 (5)1.3 创新设计 (7)2.硬件设计过程展开 (9)2.1 系统设计 (5)2.2 SPCE061A 最小系统 (5)2.3 硬件驱动电路 (7)3.训练与测试 (16)3.1 原装机器人测试 (18)3.2 机器人的拆卸 (9)3.3 确认电机连线 (11)3.4 机器人电线的连接 (13)3.5 驱动电路板与61板连线 (13)3.6 再次组装机器人 (143)4.下载最终程序并训练 (35)5.结果评价及改进意见 (36)6.参考文献 (37)7.收获体会 (38)8.附录 (39)1.设计目标1.1 硬件设计1.1.1 SPCE061A单片机本系统采用凌阳16位SPCE061A单片机作为控制中心,对输入的语音指令进行识别和处理,从而驱动机器人不同部位的直流电机,做出前进、后退、左传、右转等不同动作。
1.1.2 SPCE061A简介SPCE061A是凌阳科技研发生产的性价比很高的一款16位单片机,使用它可以非常方便灵活的实现语音的录放系统,该芯片拥有八路10位精度的ADC,其中一路为音频转换通道,并且内置有自动增益电路,用于录音。
两路10精度DAC,只需外接功放(SPY0030A)即可完成放音。
凌阳16位单片机所拥的一套指令系统和集成开发环境具有易学易用、效率高等特点。
在集成开发环境中,支持标准C语言编程,并可以实现C语言与凌阳汇编语言的相互调用,语音的录放只需调用相应的库函数就可实现。
基于凌阳单片机的跳舞机器人设计
2009年6月第2期的关键是用好、用足地下水负压时段。
碾压强度过大,可能出现土基剪切破坏;碾压强度过低,达不到扰动效果。
碾压间隔小,成本高;碾压间隔过大,空气已填入负压区,继续碾压已无意义。
碾压间隔、压路机的适宜吨位、每次碾压的遍数和方法有待于摸索和进一步研究确定。
6结论与展望桥头跳车源于工后差异沉降,在施工阶段加强土基沉降,降低桥头路堤工后沉降,可减少桥头路堤在全寿命期内的维修养护次数及其他相应损失。
可改善桥头跳车的方法很多,能否推广应用取决于相应工艺的投资水平,探寻投资少、沉降效果显著的施工方法具有实际意义。
堆载预压和真空预压是公路建设中常用的手段,通常堆载预压要求超载预压或较长的预压期。
真空预压是人工制造真空度,通过真空作用在土体中产生有效应力,使软基产生压缩沉降。
本文的方法利用周期性自然产生的真空度增加施工期的沉降,不需要超载、预压期短、不需要人工制造真空度,所产生的效果显著,是可用的施工方法。
如果工期紧,可采用井点将水等方法人工降低特定位置地下水位,配合碾压加速路基沉降。
参考文献:[1]鲍明伟.桥头跳车防治技术研究报告[R].2002,2.[2]长春科技大学环境与建设学院.长余高速公路桥头跳车研究项目专题报告[R].1999.[3]公路软土地基路堤设计与施工技术规范[M].北京:人民交通出版社,1996.[4]洪毓康.土质学与土力学(第二版)[M].北京:人民交通出版社,1979.收稿日期:2009-03-21作者简介:赵洪利(1977.5-),男,山东泰安人,山东水利职业学院教师,主要从事道路桥梁教学与研究工作。
基于凌阳单片机的跳舞机器人设计鲁冠华刘星张水利(山东水利职业学院,山东日照276826)摘要:随着科技和经济的飞速发展,16位单片机已广泛应用在高档智能型玩具的设计和开发中。
本文结合实际,提出了一种基于凌阳16位单片机语音控制的跳舞机器人设计方案,以供探讨。
关键词:机器人;凌阳单片机;驱动模块;编码;语音识别和处理随着经济的高速发展和经济全球化的加快,机器人开始应用于高档智能型玩具的设计和开发中,跳舞机器人便是这个大家庭的重要一员。
基于单片机的舞蹈机器人的设计

基于单片机的舞蹈机器人的设计1. 引言舞蹈机器人是一种结合了机械工程、电子工程和计算机科学的新兴技术,它能够模拟人类的舞蹈动作,成为了现代娱乐产业中的一种新宠。
本文将探讨基于单片机的舞蹈机器人的设计,通过对其结构、控制系统和动作生成算法等方面进行研究,为舞蹈机器人技术的发展提供一些有益的参考。
2. 背景介绍随着科技的不断发展,人们对于娱乐形式也有了更高的要求。
传统的舞台表演已经不能满足观众们对于创新和惊喜感的需求。
而舞蹈机器人作为一种创新娱乐形式,能够通过模拟人类动作来展现出独特而精彩的表演。
基于单片机是设计和控制舞蹈机器人不可或缺的技术之一。
3. 舞蹈机器人结构设计3.1 传感器系统为了使舞蹈机器人能够感知周围环境并与之互动,传感器系统是必不可少的。
常用的传感器包括光电传感器、距离传感器和姿态传感器等。
光电传感器用于检测舞台上的灯光变化,距离传感器用于测量机器人与障碍物之间的距离,姿态传感器用于检测机器人的身体姿态。
3.2 机械结构舞蹈机器人的机械结构需要具备良好的稳定性和灵活性,以便能够完成各种舞蹈动作。
常见的机械结构包括关节、连杆和齿轮等。
关节负责连接各个部件,连杆负责转动关节,齿轮则能够提供更大的转动力矩。
3.3 动力系统为了使舞蹈机器人能够完成复杂而精确的动作,需要一个高效可靠的动力系统。
常见的动力系统包括电机和伺服驱动等。
电机负责提供转动力矩,而伺服驱动则能够精确控制电机转速和位置。
4. 舞蹈机器人控制系统设计4.1 单片机选择在设计舞蹈机器人控制系统时,单片机的选择是非常重要的。
单片机需要具备足够的计算能力和IO口以满足舞蹈机器人的需求。
常用的单片机包括Arduino和Raspberry Pi等。
4.2 控制算法舞蹈机器人的控制算法需要能够准确控制机器人的运动,使其能够按照预定动作完成舞蹈表演。
常见的控制算法包括PID控制和遗传算法等。
PID控制是一种经典而有效的控制方法,而遗传算法则能够通过优化搜索来找到最优解。
毕业设计-基于单片机的舞蹈机器人控制系统设计
河南科技学院2014届本科毕业论文(设计)基于单片机的舞蹈机器人控制系统设计学生姓名:所在院系:机电学院所学专业:电气工程及其自动化导师姓名:完成时间:2014年5月24 日基于单片机的舞蹈机器人控制系统设计摘要机器人是典型的机电一体化装臵,它综合运用了机械与精密机械、微电子与计算机、自动控制与驱动、传感器与信息处理以及人工智能等多学科的最新研究成果,随着经济的发展和各行各业对自动化程度要求的提高,机器人技术得到了迅速发展,出现了各种各样的机器人产品,本文介绍的就是其中的舞蹈机器人。
舞蹈机器人的设计,首先通过对人类动作的深入了解,分析人类的动作特性,确定机器人的基本构成并选择合适的机械构造,本设计舞蹈机器人采用钢材结构,用舵机充当机器人关节,可实现类人结构。
并且与控制对象跳舞机器人的工作原理、动作过程进行比较,从而选择出组装机器人的造型,文中并分析机器人动作的局限性与优势。
同时本毕业设计介绍了基于AT89C51单片机的舞蹈机器人控制系统的设计,包括硬件部分和软件部分。
硬件部分介绍了舞蹈机器人控制系统的各模块,包括电源模块、单片机及外围接口电路模块、存储模块、串行通信模块、电机驱动控制模块及防碰撞模块六大部分;软件部分包括设定机器人的舞蹈动作程序。
详细阐述了系统的硬件实现方案和软件设计思想。
根据要求舞蹈机器人控制系统采用分时复用的方法,利用PWM信号对驱动电机进行控制,用以完成作品设计。
关键词:单片机,PWM信号,舞蹈机器人,舵机,直流电机MICROCONTROLLER-BASED ROBOT CONTROLSYSTEM DESIGN DANCEAbstractRobot is a typical mechatronic device, which combines the use of the latest research machinery and precision machinery, microelectronics and computer, automatic control and drive, sensors and information processing, and artificial intelligence, multi-disciplinary, with the economic development and the lines each industry to raise the required degree of automation, robotics technology has been developing rapidly, there has been a wide range of robotic products described in this article is one of the dancing robot.Design dancing robot, first through in-depth understanding of human action, human operating characteristics analysis to determine the basic structure of the robot and select the appropriate mechanical construction, the design of steel structures using robot dance, act as a robot with a steering joint, enabling the class human structure.And dancing robot control object works, the course of action are compared to select the shape of the assembly robot, the paper analyzed the limitations and advantages of robot action.Meanwhile, the graduation project presentation based on AT89C51 dance robot control system design, including hardware and software components.Hardware section describes the various modules dancing robot control system, including the power supply module, microcontroller and peripheral interface circuit module, memory module, serial communication module, motor drive control module and anti-collision module six parts; Software includes setting the robot dance program.Elaborated hardware implementations and software design. Dancing robot control system according to the requirements using time division multiplexing method using PWM control signal to the drive motor, designed to complete the work.Keywords: microcontroller, PWM signal, dancing robot, steering, DC目录1 绪论 (1)2方案论证取优及控制系统设计 (1)2.1 设计功能要求 (1)2.2方案论证取优 (2)2.3 自由度的分配 (2)2.4 电机的选择 (4)2.5 舞蹈机器人的机械部件 (5)2.6 系统设计方案分析 (5)3 系统硬件选型 (6)3.1 单片机可编程控制器部分 (6)3.1.1 单片机概述 (6)3.1.2 单片机选型 (6)3.2 电源模块 (7)3.3 串行通信模块 (7)3.4 存储模块 (8)3.5 电机驱动控制模块 (8)3.5.1 舵机的驱动控制模块 (8)3.6 防碰撞模块 (12)4 控制系统软件设计 (12)4.1 主程序 (13)4.2 定时器中断服务子程序 (13)4.3 串行中断服务子程序 (14)4.4 外部中断服务子程序 (14)5 结论 (15)参考文献 (16)附录 (16)致谢 (23)1 绪论40年前,比尔〃盖茨放弃学业,创立了微软,成为个人电脑普及革命的领军人物;10年前,他曾预言,机器人即将重复个人电脑崛起的道路。
舞蹈机器人设计
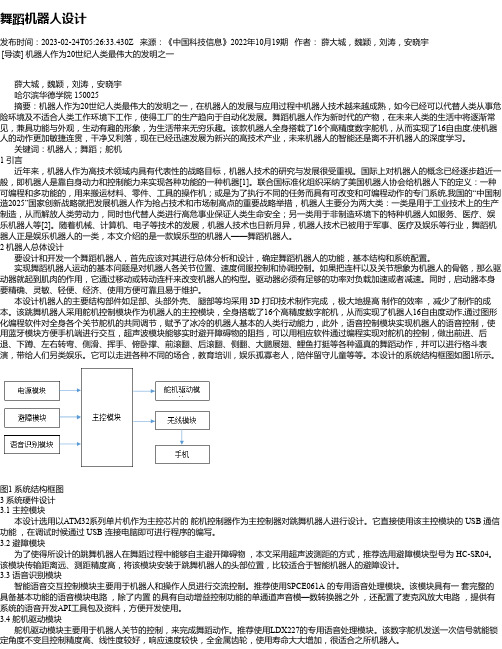
舞蹈机器人设计发布时间:2023-02-24T05:26:33.430Z 来源:《中国科技信息》2022年10月19期作者:薛大城,魏颖,刘涛,安晓宇[导读] 机器人作为20世纪人类最伟大的发明之一薛大城,魏颖,刘涛,安晓宇哈尔滨华德学院 150025摘要:机器人作为20世纪人类最伟大的发明之一,在机器人的发展与应用过程中机器人技术越来越成熟,如今已经可以代替人类从事危险环境及不适合人类工作环境下工作,使得工厂的生产趋向于自动化发展。
舞蹈机器人作为新时代的产物,在未来人类的生活中将逐渐常见,兼具功能与外观,生动有趣的形象,为生活带来无穷乐趣。
该款机器人全身搭载了16个高精度数字舵机,从而实现了16自由度,使机器人的动作更加敏捷连贯,干净又利落,现在已经迅速发展为新兴的高技术产业,未来机器人的智能还是离不开机器人的深度学习。
关键词:机器人;舞蹈;舵机1 引言近年来,机器人作为高技术领域内具有代表性的战略目标,机器人技术的研究与发展很受重视。
国际上对机器人的概念已经逐步趋近一般,即机器人是靠自身动力和控制能力来实现各种功能的一种机器[1]。
联合国标准化组织采纳了美国机器人协会给机器人下的定义:一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统,我国的“中国制造2025”国家创新战略就把发展机器人作为抢占技术和市场制高点的重要战略举措,机器人主要分为两大类:一类是用于工业技术上的生产制造,从而解放人类劳动力,同时也代替人类进行高危事业保证人类生命安全;另一类用于非制造环境下的特种机器人如服务、医疗、娱乐机器人等[2]。
随着机械、计算机、电子等技术的发展,机器人技术也日新月异,机器人技术已被用于军事、医疗及娱乐等行业,舞蹈机器人正是娱乐机器人的一类,本文介绍的是一款娱乐型的机器人——舞蹈机器人。
2 机器人总体设计要设计和开发一个舞蹈机器人,首先应该对其进行总体分析和设计,确定舞蹈机器人的功能,基本结构和系统配置。
舞蹈机器人控制系统研究与设计
关键词:智能服务机器人;舞蹈机器人;控制与调试;动作;舵机;单片机;系统
一II—
东北大学硕士学位论文
Research and Design of Dancing Robot Control
System
Abstract
Seen from the development trend Ot robot,intelligent service robot,which has close relation to human life,is playing a more and more significant role in various fields.
本文基于单片机自主开发了一个双足15自由度舞蹈机器人,包括腿、踝、胯、腰、 肩、肘和颈等关节。其控制系统分为硬件系统和软件系统两部分。设计一个舞蹈动作须 15个电机协调动作,动作调试是一个非常繁琐的过程,为此,开发了基于Pc计算机(上 位机)的动态调试软件。通过动态调试软件编排舞蹈动作,并把相关的动作数据传送给 下位机,最大限度地缩减了舞蹈动作的设计和调试过程。
Finally,the dancing robot is evaluated.The success and failure is pointed out and .1lI—
东北大学硕士学位论文 beRerment measures are put forward Key words:intelligent service robot;dancing robot;control;debugging;movement;steering gear;single—chip;system
舞蹈机器人步进电机驱动电路和程序设计
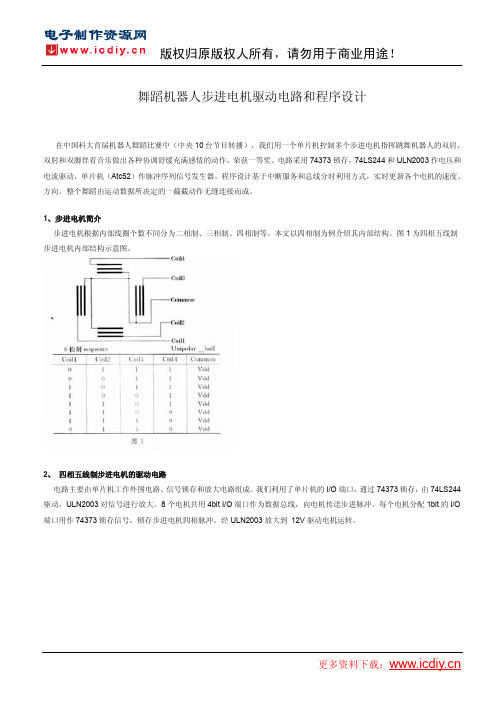
舞蹈机器人步进电机驱动电路和程序设计在中国科大首届机器人舞蹈比赛中(中央10台节目转播),我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。
电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。
程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。
整个舞蹈由运动数据所决定的一截截动作无缝连接而成。
1、步进电机简介步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。
本文以四相制为例介绍其内部结构。
图1为四相五线制步进电机内部结构示意图。
2、四相五线制步进电机的驱动电路电路主要由单片机工作外围电路、信号锁存和放大电路组成。
我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。
8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。
每个电机分配1bit的I/O 端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。
电路原理图(部分)如图2所示。
(1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。
该系列单片机上集成8K的ROM,128字节RAM可供使用。
(2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。
ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。
关于这些芯片的详细介绍可参见它们各自的数据手册。
(3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。
我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。
这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。
舞蹈机器人设计方案代码
_nop_() ;
}
}
}
/********************************************************/
/* 开关电机 */
/* 0--关电机 //关某位用 1 或,其他位为0 */
/* 1--正转 //开某位用 0 与,其他位为1 */
/* 2--反转 */
void scan0(unsigned int n0);
void scan1(unsigned int n1);
void scan2(unsigned int n2);
void scan3(unsigned int n3);
void scan4(unsigned int n4);
void scan5(unsigned int n5);
{switch(s1)
{case 0: {temp_1=temp; temp_1|=0x000c; temp=temp_1;} break ;//关电机
case 1: {temp_1=temp; temp_1&=0xfffb; temp=temp_1;} break ;//正转
case 2:{temp_1=temp; temp_1&=0xfff7; temp=temp_1;} break ;//反转
unsigned char P17_temp;
unsigned char P17_flag;
unsigned int num_0=0xffff;
unsigned int num_1=0xffff;
unsigned int num_2=0xffff;
unsigned int num_3=0xffff;
单片机机器人:4.跳舞
SoccerBot
EasyBot
就好比是一只宠物一样
超萌的该机器人是为了
让孩子们喜欢,并产生
共鸣而发明 的。 用柔
软的橡胶材料制成的小
巧可爱的Keepon,同时
还为治疗患有精神疾患
的 儿童所使用,预计会
成为患有自闭症儿童的
最好的朋友。 请各位也
制作一个超级可爱超萌
的像Keepoon一样,带来
SoccerBot
SoccerBot
EasyBot
9
7 将4步骤剩余部分组装到主体上
SoccerBot
10
8 组装CPU主板
SoccerBot
11
9 组装红外线传感器和遥控接收板
SoccerBot
12
10 制作身体 1 (左侧角色 character)
SoccerBot
13
11 制作身体 2 (左侧角色 character)
SoccerBot
SoccerBot
EasyBot
• 2.按无线遥控器3号键,两侧跳 舞机器人 的身体向左侧移动, 按4号键则向右侧 移动。
SoccerBot
EasyBot
• 3.请尝试让两侧的跳舞机器人检 测到红 外线传感器时,左右摇 摆跳舞。
SoccerBot
EasyBot
• 4.试试组合所有的程序进行游戏 吧。
14
12 制作胳膊(左侧角色 character)
SoccerBot
15
13 连接胳膊和身体Leabharlann 1 (左侧角色 character)
SoccerBot
16
14 连接胳膊和身体 2 (左侧角色 character)
舞蹈机器人控制系统研究与设计
舞蹈机器人控制系统研究与设计随着科技的不断发展,机器人已经逐渐融入我们的日常生活。
近年来,舞蹈机器人作为一种具有艺术性和智能性的机器人,越来越受到人们的。
本文旨在研究与设计一种舞蹈机器人控制系统,以提高舞蹈机器人的表现力和控制精度。
在当前的研究中,舞蹈机器人控制系统的研究仍存在许多问题需要解决,因此本文的研究具有一定的现实意义和价值。
本文研究的主要方法是构建一个舞蹈机器人控制系统,包括以下几个步骤:确定机器人结构:根据舞蹈动作的要求,设计机器人的机械结构,包括肢体关节、连杆和驱动器等。
控制系统设计:采用先进的控制算法和硬件设备,设计机器人的控制系统。
具体包括控制器、传感器、致动器等。
跳舞动作编排:根据舞蹈动作的要求,利用计算机编程语言,编写机器人的舞蹈动作程序。
系统调试与优化:通过实验和仿真测试,对系统进行调试和优化,提高机器人的控制精度和表现力。
通过实验和仿真测试,本文得到了以下研究结果:跳舞动作识别:利用机器学习算法,成功实现了对舞蹈动作的识别和分类。
机器人在接收到相应的舞蹈动作指令后,可以快速准确地识别并执行相应的舞蹈动作。
控制系统稳定性分析:通过对比不同控制算法的性能,发现采用先进的模糊控制算法可以使控制系统更加稳定,提高机器人的表现力。
数据采集与分析:通过传感器采集机器人在执行舞蹈动作过程中的各项数据,并对其进行分析和处理。
这些数据包括关节角度、角速度、加速度等。
通过数据分析,可以更好地理解机器人的运动特性,为优化控制系统提供依据。
通过本研究,我们成功地构建了一种舞蹈机器人控制系统,实现了对舞蹈动作的识别、控制系统的稳定性和数据采集与分析。
然而,本研究仍存在一些不足之处,例如对舞蹈机器人的动作多样性、复杂性和人机交互等方面的研究尚不充分。
未来,我们将进一步深入研究舞蹈机器人的控制系统,以提高机器人的动作多样性和灵活性。
同时,我们还将研究如何实现机器人与人类的更高效交互,使舞蹈机器人在艺术表演和娱乐领域发挥更大的作用。
舞蹈机器人方案

舞蹈机器人方案随着技术的不断进步,机器人已经不再只是被用于工业、医疗等领域,还可以应用到娱乐、艺术等方面。
舞蹈机器人便是其中之一。
本文将介绍一款舞蹈机器人的设计方案。
一、机器人构造舞蹈机器人主要由以下部分组成:机身、关节、电机、传感器等。
1. 机身机身是机器人的主要构造,它需要具有良好的稳定性和坚固性。
我们选择采用铝合金材料作为机身材料,不但强度高,而且重量轻,有利于舞蹈机器人的稳定性控制。
2. 关节关节是机器人活动的部分,在舞蹈机器人中,有手臂和腿部关节。
我们选择采用航模舵机来控制关节的活动,这种舵机可以实现高速度和高精度的调节,能够满足机器人的舞蹈动作需求。
3. 电机电机是机器人的驱动部分,对于舞蹈机器人来说,我们选择使用内置电机的驱动方案。
这种方案除了可以大大减小机器人的体积外,还可以避免在运动过程中出现电线纠缠的问题。
4. 传感器传感器是舞蹈机器人中至关重要的部分,它能够实现对机器人状态的检测和控制。
我们选择使用三轴加速度计、陀螺仪来实时监测舞蹈机器人的姿态,并根据其变化控制机器人的方向和速度。
二、控制系统舞蹈机器人的运动需要一个稳定、可靠的控制系统。
我们采用单片机作为控制系统核心,并使用PWM信号控制舵机和电机的转动。
同时,为了避免机器人出现倾斜、跌倒等问题,我们还添加了一个PID控制器来调节机器人的姿态。
三、用户界面为了方便用户控制舞蹈机器人,我们设计了一款简单易用的用户界面。
用户界面可以通过蓝牙连接到机器人,实现对机器人的遥控。
四、附加功能除了基本的舞蹈功能外,我们还为舞蹈机器人设计了一些附加功能,包括:1. 摄像头:机器人上配备了摄像头,可以拍摄舞蹈视频。
2. 音响:机器人内置音响,可以播放各种音乐,让舞蹈更加生动。
3. RGB灯:机器人上还配备了可自由调节色彩的RGB灯,可以根据不同的舞蹈场合进行调整。
总结我们的舞蹈机器人使用了铝合金机身,内置电机驱动,使用舵机控制关节运动,通过三轴加速度计和陀螺仪实时监测机器人状态,使用PID控制器调节姿态,采用单片机和PWM信号控制运动,建立了简单易用的用户界面,并添加了摄像头、音响和RGB 灯等附加功能。
基于增强型51单片机的舞蹈机器人控制系统设计
《智能机器人》August , 2019INTELLGENT ROBOT1 引言远工业革命发展至今,机器人已经逐渐进入了人们的生活,其中舞蹈机器人是典型的高科技机电一体化产品,现在已成为现在不少人研究的对象,而且也成为人们娱乐休闲的新方式。
本文设计了一种舞蹈机器人控制系统,通过增强型51单片机用来实现6个舵机对机器人关节的控制,从而实现舞蹈机器人的运动,当然不仅仅是简单的前进、后退、旋转等简单的动作,还有一些空翻、劈叉等高难度动作。
2 总体方案设计舞蹈机器人舵机自由度分配如图1所示,1、2号作为机器人的髋关节,3、4号作为机器人的膝关节,5、6号作为机器人的踝关节。
舞蹈机器人控制系统总体方案设计主要分为两个部分,硬件设计和软件设计。
在设计硬件电路时,基本设计原则是改善系统集成,减小控制系统的大小,尽可能地降低成本。
而在软件设计方面,选用较为先进的ZIDE 人机控制界面软件。
在这个友好人机界面可以设置各基于增强型51单片机的舞蹈机器人控制系统设计盐城市计量测试所 吉春雷 谈格 许杰盐城工学院电气工程学院 倪松杰摘 要本文主要介绍了基于增强型51单片机的舞蹈机器人控制系统设计,介绍了舞蹈机器人的机械结构、功能和技术要求等,硬件设计以及软件设计。
硬件设计方面选用增强型51单片机作为控制核心,选择数字舵机作为机器人关节的连接,通过软件编写PWM 波控制程序实现机器人的前进、后退、旋转等一系列动作。
关键词舞蹈机器人;单片机;舵机控制;PWM 波种参数和数据,也可以设置舞蹈机器人的各种运动方式。
最重要的是这个软件比较容易调整误差,也方便后期的程序维护。
3 系统硬件设计与实现硬件设计可以说是整个舞蹈机器人控制系统设计的最基本的部分,它设计的好与坏将影响到舞蹈机器人的性能。
本次设计的舞蹈机器人控制系统主要包括五个模块:CPU 控制模块、舵机控制模块、电源模块、显示模块、按键模块。
3.1 CPU 控制模块CPU 是整个机器人控制系统的核心部分。
基于单片机的舞蹈机器人的设计
基于单片机的舞蹈机器人的设计Abstract: This academic paper proposes the design of a dance robot based on a single-chip microcontroller. The paper combines the principles of mechanical engineering, electronic engineering and computer science to design a dance robot that can perform various dance forms. The robot is developed using Arduino board, servo motors, sensors and various other components. The paper also discusses the challenges faced during the design process and the solutions adopted to overcome those challenges. The performance of the robot is evaluated through various experiments and tests. The results demonstrate that the robot can perform various dance routines in a smooth and efficient manner, making it a promising platform for developing dance robots in the future.Key words: dance robot, single-chip microcontroller, Arduino board, servo motors, sensors.Introduction:Dance robots have been gaining attention in recent years due to their potential applications in entertainment, education, and even in the medical field. The development of these robots requires expertise in mechanical engineering, electronic engineering and computer science. This academic paper proposes the design of a dance robot based on a single-chip microcontroller. The robot is designed using Arduino board, servo motors, sensors and various other components.Design:The design of the dance robot involves several components such as the mechanical structure, electronic circuit,software program, and sensor system. The mechanical structure is designed to simulate the movements of a human dancer. The structure is made of lightweight and durable materials to ensure stability and flexibility during the dance routines. The electronic circuit consists of the Arduino board, servo motors, and other electronic components. The Arduino board is the brain of the robot and it controls the Servo motors to perform the required movements.The software program is written in C++ programming language and is uploaded to the Arduino board. The program defines the dance routines and controls the sequence of movements of the Servo motors. The sensor system consists of various sensors such as a Gyroscope, Accelerometer, and Infrared Sensor. The sensor system helps the robot maintain balance and enables it to sense the environment around it.Challenges and Solutions:The design of the dance robot involves several challenges such as choosing the appropriate components, programming the microcontroller, and ensuring stability during the dance routine. The selection of the correct components is crucial to the performance of the robot. For instance, choosing the correct servo motor with enough torque can make a significant difference in the robot's performance.Programming the microcontroller requires expertise in programming languages such as C++. Developing a smooth and efficient dance routine requires understanding basic concepts such as timing, control systems, and algorithms. Ensuring stability during the dance routine requires a strong mechanical structure, precise control of the servo motors and efficient use of sensors.Performance evaluation:The performance of the dance robot is evaluated through several experiments and tests. The robot performs various dance routines such as salsa, hip-hop, and classical dance. The robot's movements are smooth and efficient, demonstrating the effectiveness of the design.Conclusion:In conclusion, this academic paper proposes the design of a dance robot based on a single-chip microcontroller. The design involves several components such as the mechanical structure, electronic circuit, software program, and sensor system. The robot is developed using Arduino board, servo motors, sensors and various other components. The robot's performance is evaluated through various experiments and tests, demonstrating its effectiveness in performing various dance routines. The design provides a promising platform for developing dance robots in the future.。
基于AVR单片机的舞蹈机器狗设计与实现
基于AVR单片机的舞蹈机器狗设计与实现随着科技的不断发展,机器人已经成为了人类生活中重要的一部分。
机器人不仅能够作为人类的助手完成一些生产制造活动,更可以在娱乐领域中发挥出色的作用,其中舞蹈机器人更是受到众多人的喜爱。
本文将介绍一款基于AVR单片机的舞蹈机器狗的设计与实现。
首先,需要明确设计的整体结构和功能。
该舞蹈机器狗是一种基于AVR单片机的机器人狗,其身体由高强度塑料板和3D打印出来的骨架组成,搭载了麦克风、音效芯片、RGB LED和各种传感器。
机器狗可以通过内置程序实现一系列特定的动作,根据音乐节奏舞动身体,还可以根据环境变化发出相应的声音和颜色,给人们带来视觉和听觉上的冲击。
接着,需要明确控制系统的设计与实现。
该舞蹈机器狗的控制系统采用AVR单片机,通过各种传感器采集环境信号,并通过预设程序进行计算,生成相应的控制命令,驱动机器狗完成相应的动作。
同时,控制系统还需要实现机器狗的交互功能,接收外部信号并进行相应的响应。
最后,需要完成机器狗的机械部件的设计与制造。
机器狗的身体由高强度塑料板和3D打印出来的骨架组成,其关节和运动部件均采用高精度数字控制加工技术,保证了机器狗的稳定性和精准度。
机器狗内置麦克风、音效芯片、RGB LED和各种传感器,保证了具有良好的音乐感应和环境感应功能。
综上所述,基于AVR单片机的舞蹈机器狗是一款具有良好舞蹈效果和互动功能的机器人,其设计与实现涉及到机械设计、控制系统设计、计算机软件等多个方面,需要有多个领域的专业技术支持。
在未来,我们可以将其应用到更多的娱乐、舞蹈演出和展示等领域,为人们带来更多的乐趣和惊喜。
一种基于单片机的舞蹈机器人的开发和设计
一种基于单片机的舞蹈机器人的开发和设计董丽【摘要】随着经济的发展和科学技术自动化程度要求的提高,机器人技术得到了迅速发展,机器人已经出现在娱乐领域.本文的机器人设计是基于高质量的单片机80C51的硬件设备.技术PWM调制结合三个子程序和主程序中,舞蹈机器人可以完成所有提前安排的行动,让机器人的动作随指令变化而完成规定的不同动作.【期刊名称】《西部皮革》【年(卷),期】2017(039)008【总页数】1页(P66)【关键词】跳舞机器人;PWM技术;单片机80C51【作者】董丽【作者单位】西华师范大学,四川南充637000【正文语种】中文【中图分类】TP2机器人技术已经应用在工业,农业,和我们日常生活的方方面面,甚至出现在了娱乐场所。
舞蹈机器人是系统工程设计的结果,本文引入了一种新的带轮子小型舞蹈机器人和其所用的CPU是单片机80C51是一种通用的控制型单片机。
1.1 电力驱动机。
舞蹈机器人可以做各种各样的舞蹈动作流利,因为开车电机固定在每一个关节。
驱动能力的能源消耗和机器人的电机是整个设计的关键问题。
整体电动液压式动力转向系统能源具有体积小,重量轻,位置准确,没有任何额外的驱动电路,它可以很好的控制每一个机器人的关节。
1.2 机身结构。
模仿人类的结构被引用的舞蹈机器人的整体结构和自由程度是每个关节配置所遵循的原理:颈部关节所需的两个电机,因为它有两个免费的度和能够做点头等动作,震动。
舞蹈机器人的控制系统包括两个部分,一个是硬件和其他软件。
后者包括机器人的动态调试软件的计算机的软件系统在机器人的一部分。
首先用户可以编辑和调试舞蹈机器人的运动提供的好的I / O接口的动态调试软件上计算机,使动作列表。
2.1 控制系统的硬件设计(1)电力系统。
有很多组件机器人的控制系统硬件电路的而且电机和逻辑电路通常需要不同电压的电压调节器必须使用在随后的系统有三个要求[5]:a)提供集成电路组件的输出电压恒定,转向能源和直流电机;b)保持电压不变,负载改变;c)逻辑电路的电压必须是常数即使电机启动或突然改变方向,导致电池供应更多的电机瞬变电流。
用单片机实现语音控制机器人

用单片机实现语音控制机器人制作人:潘磊pb02023035卢恒pb02006088题目:用凌阳单片机实现语音识别功能并传递给PIC单片机信号,由PIC单片机控制机器人实现动作关键字:PIC单片机,凌阳单片机,语音控制单片机在现今生活中占有越来越重要的地位,用语音控制单片机实现控制更具有广泛的应用价值。
用语音控制舞蹈机器人做一些动作是我们这次实现的功能,虽然这在语音控制方面仍处于起步阶段,但他体现了语音控制的原理和基本实现,也为更高级的运用打下了基础。
原理:1.语音识别原理语音识别电路基本结构如上图所示:语音识别分为特定发音人识别(Speaker Dependent)和非特定发音人识别(Speaker Independent)两种方式。
特定发音人识别是指语音样板由单个人训练,对训练人的语音命令识别准确率较高,而其他人的语音命令识别准确率较低或不识别。
非特定发音人识别:是指语音样板由不同年龄、不同性别、不同口音的人进行训练,可以识别一群人的命令。
语音样板的提取非常重要。
我们将标准模式的存储空间称之为“词库”,而把标准模式称之为“词条”或“样板”。
所谓建立词库,就是将待识别的命令进行频谱分析,提取特征参数作为识别的标准模式。
识别过程首先要滤除输入语音信号的噪音和进行预加重处理,提升高频分量,然后用线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,接着与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征相一致时,便被机器识别,产生识别结果输出。
如果输入的语音与标准模式的特征完全一致固然好,但是语音含有不确定因素,完全一致的条件往往不存在,事实上没有人能以绝对相同的语调把一个词说两遍,因此,预先制定好计算输入语音的特征模式与各特征模式的类似程度,或距离度的算法规则固化在ROM中,把该距离最小,即最类似的模式作为识别相应语音的手段。
当然,影响识别率的因素还有一些,如连续发音(如英语)与断续发音(如汉语)的不同(二者区别在于单词间隔有200ms 以上的空隙时间)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如何用凌阳单片机设计和制作跳舞机器人。
1 系统整体设计
在本方案中,我们设计了机械本体、控制系统、 语音模块、电源模块、驱动系统等五部分,组合构成 简易的跳舞机器人。 机器人在启动后,自动完成跳 舞动作。
各个系统具体功能如下: (1) 机 械 本 体 : 整 体 形 象 设 计 为 人 形 , 为 比 赛 动
图 2 语音识别功能图
2.4 驱动系统 经过对比,驱动电机采用直流电机。 控制电路
采用 H 型桥电路,实现电机的正反转,其驱动电路 如图 3 所示。
图 1 硬件控制原理图
图 3 驱动电路图
第2期 2009 年 6 月
鲁冠华等:基于凌阳单片机的跳舞机器人设计
·13·
2.5 电源模块 由于跳舞机器人是独立行走的系统,所以电源
随着经济的高速发展和经济全球化的加快,机 器人开始应用于高档智能型玩具的设计和开发中, 跳舞机器人便是这个大家庭的重要一员。 本方案采 用高性能的控制内核, 可较容易地实现产品升级。 通过不同的程序, 可以使机器人做出不同的动作, 克服了传统玩具功能单调、重复的缺点,能与孩子 实现互动,拓展儿童智力。 同时可激发儿童兴趣,对 他们以后的健康成长产生积极的作用。 本文将探讨
图 4 程序流程图
参考文献: [1] 李晶皎.嵌入式语音技术及凌阳 16 位单片机应用[M].北京 航 空 航 天 大 学 出 版 社 ,2003,11. [2] 彭 传 正.凌 阳 单 片 机 原 理 与 实 践[M].北 京 航 空 航 天 大 学 出 版 社 ,2006,11.
收 稿 日 期 :2009-03-28 作者简介:鲁冠华( 1980-),男,山东嘉祥人,山 东 水 利 职 业 学 院讲师,主要从事电气控制类方面的教学与研究工作。
降,不需要超载、预压期短、不需要人工制造真空 度,所产生的效果显著,是可用的施工方法。 如果工 期紧,可采用井点将水等方法人工降低特定位置地 下水位,配合碾压加速路基沉降。
参考文献: [1] 鲍明伟.桥头跳车防治技术研究报告[R] .2002,2. [2] 长春科技大学环境与建设学院.长余高速公路桥头跳车研 究 项 目 专 题 报 告 [R].1999. [3] 公路软土地基路堤设计与施工技术规范[M].北京:人 民 交 通 出 版 社 ,1996. [4] 洪毓康.土质学与土力学(第二版)[M].北京:人民交通出版 社 ,1979.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
的关键是用好、用足地下水负压时段。 碾压强度过 大,可能出现土基剪切破坏;碾压强度过低,达不到 扰动效果。 碾压间隔小,成本高;碾压间隔过大,空 气已填入负压区,继续碾压已无意义。 碾压间隔、压 路机的适宜吨位、每次碾压的遍数和方法有待于摸 索和进一步研究确定。
第2期 2009 年 6 月
鲁冠华等:基于凌阳单片机的跳舞机器人设计
Байду номын сангаас
·11·
基于凌阳单片机的跳舞机器人设计
鲁冠华 刘 星 张水利 (山东水利职业学院,山东 日照 276826)
摘 要:随着科技和经济的飞速发展,16 位单片机已广泛应用在高档智能型玩具的设计和开发中。 本文结合实际,提出了 一种基于凌阳 16 位单片机语音控制的跳舞机器人设计方案,以供探讨。 关键词:机器人;凌阳单片机;驱动模块;编码;语音识别和处理
语音压缩编码中的数据量表达式为: 数据量=[(采样频率 * 量化位数)/8]* 声道数 压缩编码的目的是通过对数据的压缩,达到高 效率的存储可转换数据,即在保证一定音质的条件 下以最小数据量来表达可传递声音信息。 常用的音频形式和压缩算法有: 波形编码、参 量编码和混合编码三种。 语音识别功能如图 2 所示。
收 稿 日 期 :2009-03-21 作者简介:赵洪利(1977.5-),男 ,山 东 泰 安 人 ,山 东 水 利 职 业 学院教师,主要从事道路桥梁教学与研究工作。
·12·
山东水利职业学院院刊
第2期 2009 年 6 月
作提供具体的客观外在载体; (2) 控 制 系 统 : 完 成 在 跳 舞 过 程 中 的 各 种 动 作 ,
内的诸多因素。 由于机器人的腿是灵活摆动的,所 以要把大部分控制元件安装在机器人的腰部以上, 这就会给机器人的平衡带来问题。 特别是机器人快 速运动时,其内部电动机高速旋转还需要带动外壳 移动势必会产生一定的振动, 所以在设计的时候, 要尽量加大脚和地面的接触面积,尽量减少上体重 量。 可将双臂的电动机去掉,在腿部和两臂之间加 上传动机构,使两臂和腿部一起协调动作。 这样不 仅减少了上体的重量,还减少了单片机对两臂的控 制过程,简化了程序设计。 如果让机器人像人一样 迈步前进,动作很容易做出,但是单腿着地时的平 衡是很难做到的,所以设计时在机器人脚下加装轮 子,让轮子实现机器人真正意义上的行走。 考虑以 上因素,具体设计如下:两脚独立安装轮子,通过电 动机来实现机器人的前进、后退、左转、右转;头部 装有一个驱动电机,实现头部的左右转动。 2.2 控制系统
使机器人灵活平稳地跳舞; (3)语音模 块 :识 别 、处 理 语 音 信 号 ,在 跳 舞 过
程中伴音; (4)驱动系统:将单片机信号进行功放,驱动电机; (5)电 源 模 块 :主 要 为 机 器 人 系 统 提 供 动 力 来
源。
2 组成部分设计
2.1 机械本体单元 把机器人设计成人形要考虑包括平衡问题在
6 结论与展望
桥头跳车源于工后差异沉降,在施工阶段加强 土基沉降,降低桥头路堤工后沉降,可减少桥头路 堤在全寿命期内的维修养护次数及其他相应损失。 可改善桥头跳车的方法很多,能否推广应用取决于 相应工艺的投资水平,探寻投资少、沉降效果显著 的施工方法具有实际意义。
堆载预压和真空预压是公路建设中常用的手 段, 通常堆载预压要求超载预压或较长的预压期。 真空预压是人工制造真空度,通过真空作用在土体 中产生有效应力,使软基产生压缩沉降。 本文的方 法利用周期性自然产生的真空度增加施工期的沉
跳 舞 机 器 人 主 控 制 器 选 用 凌 阳 公 司 的 16 位 SPCE061A 单片机, 用于实现跳舞机器人的相关运 动和声音控制。 硬件控制原理如图 1 所示。
2.3 语音模块 为简化结构,语音模块直接装在单片机电路板
上。 凌阳 SPCE061A 单片机在语音识别和处理方面 有其独到之处,而且开发环境简单。 外界的模拟信 号必须经过数字化处理才能转换成机器所能识别 的信号,即语音的压缩编码技术。
相关电动机实现动作; (3)转弯时,单片机只向一个电动机发出 脉冲实
现转弯,转到所需角度后,发出停止信号; (4)当 头 部 需 转 动 时 , 单 片 机 向 头 部 电 机 发 出 正
转或反转信号,动作执行完毕由单片机控制结束; (5)在 需 要 播 放 声 音 的 时 候 , 单 片 机 调 用 声 音 处
模块必须随身携带, 我们这里用四节 1.5V 干电池 提供。 系统所需电压为 5V 和 3V,其中 CPU 所需电 压为 3.3V,I/O 端口高电平为 3.3~5V。
3 算法和软件设计
3.1 算法 (1)接 收 到 控 制 信 号 时 , 首 先 由 单 片 机 对 信 号 作
出判断; (2)前 进 时 或 停 止 时 , 均 由 单 片 机 发 出 指 令 驱 动
理程序,查找相应译码队列并播放。 3.2 程序流程图
将所有的动作和声音信息全部保存在控制系 统中,并通过单片机统一控制,从而实现机器人自 动控制。 程序流程如图 4 所示。
4 功能测试
为测试机器人的稳定性,在实验室光滑地板上 进行了一系列试验。 试验结果如下:
(1)机器人在直线行走时,速度在不大于 0.3m/s 可稳定行走;
(2)头部最 大 转 角 170 度 ,转 速 可 调 ,但 不 能 太 高,否则会引起震动,影响平衡;
(3)各 动 作 和 音 乐 均 可 按 程 序 流 畅 播 放 。
5 结论
基于凌阳单片机的控制电路,构建了跳舞机器 人控制系统, 跳舞机器人各个驱动电机可独立运 动,互不干扰;采用手脚连动结构,便于机器人保持 平衡;实现了机器人的自动控制。 试验证明,跳舞可 以协调稳定地完成程序要求的动作, 达到预期目 的。