【CN110188008A】作业调度主备切换方法、装置、计算机设备及存储介质【专利】
机器人调度方式切换方法、第一机器人、设备及存储介质的制作方法
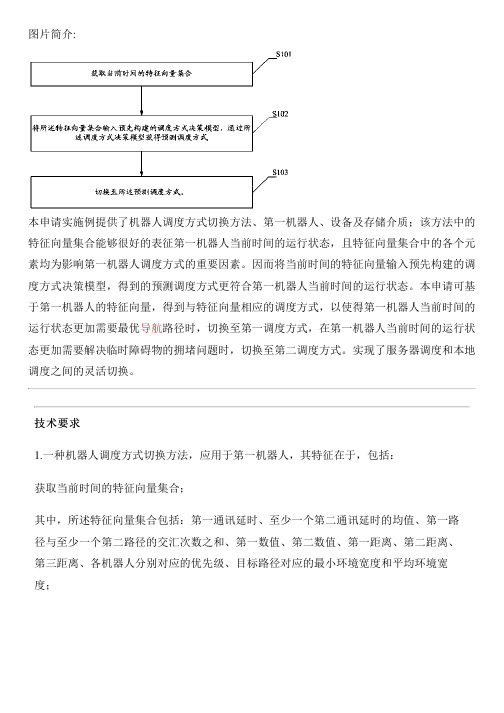
图片简介:本申请实施例提供了机器人调度方式切换方法、第一机器人、设备及存储介质;该方法中的特征向量集合能够很好的表征第一机器人当前时间的运行状态,且特征向量集合中的各个元素均为影响第一机器人调度方式的重要因素。
因而将当前时间的特征向量输入预先构建的调度方式决策模型,得到的预测调度方式更符合第一机器人当前时间的运行状态。
本申请可基于第一机器人的特征向量,得到与特征向量相应的调度方式,以使得第一机器人当前时间的运行状态更加需要最优导航路径时,切换至第一调度方式,在第一机器人当前时间的运行状态更加需要解决临时障碍物的拥堵问题时,切换至第二调度方式。
实现了服务器调度和本地调度之间的灵活切换。
技术要求1.一种机器人调度方式切换方法,应用于第一机器人,其特征在于,包括:获取当前时间的特征向量集合;其中,所述特征向量集合包括:第一通讯延时、至少一个第二通讯延时的均值、第一路径与至少一个第二路径的交汇次数之和、第一数值、第二数值、第一距离、第二距离、第三距离、各机器人分别对应的优先级、目标路径对应的最小环境宽度和平均环境宽度;其中,所述第一通讯延时为所述第一机器人与服务器的通信延时;一个所述第二通讯延时为所述第一机器人与至少一个第二机器人中任意两个机器人之间的通信延时;不同第二通讯延时对应的两个机器人不完全相同;所述第一路径为所述第一机器人在对应的导航路径中所述当前时间未经过的路径;一个所述第二路径为相应的所述第二机器人在对应导航路径中所述当前时间未经过的路径;所述第一数值为基于所述服务器得到的所述第二机器人的数量;所述第二数值为基于局域网得到的所述第二机器人的数量;所述第一距离为所述第一机器人所述当前时间所在第一目标位置分别与所述至少一个第二机器人所述当前时间所在第二目标位置之间的距离的最小值;所述第二距离为所述第一目标位置分别与至少一个所述第二目标位置之间的距离的最大值;所述第三距离为所述第一目标位置与至少一个所述第二目标位置之间的距离的平均值;所述目标路径为在所述第一路径中以所述第一目标位置为起点,以距离所述第一目标位置第四距离的点为终点的路径;将所述特征向量集合输入预先构建的调度方式决策模型,通过所述调度方式决策模型获得预测调度方式,所述预测调度方式包括利用所述服务器调度所述第一机器人的第一调度方式和利用所述第一机器人调度自身的第二调度方式;切换至所述预测调度方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910372318.5
(22)申请日 2019.05.06
(71)申请人 平安科技(深圳)有限公司
地址 518000 广东省深圳市福田区福田街
道福安社区益田路5033号平安金融中
心23楼
(72)发明人 周广洲
(74)专利代理机构 深圳众鼎专利商标代理事务
所(普通合伙) 44325
代理人 黄章辉
(51)Int.Cl.
G06F 11/20(2006.01)
G06Q 10/06(2012.01)
(54)发明名称
作业调度主备切换方法、装置、计算机设备
及存储介质
(57)摘要
本发明公开了一种作业调度主备切换方法、
装置、计算机设备及存储介质,所述方法包括:以
预设时间间隔,获取预设守护进程的属性信息,
并对属性信息进行安全性检查;若安全性检查的
结果为异常,则获取预设备机的设备状态;若预
设备机的设备状态为备用状态,则将预设主备切
换指令发送到预设备机;暂停工作进程,并保存
主机中的调度信息和作业流信息;若接收到预设
备机返回的确认消息,则将调度信息和作业流信
息发送到预设备机,以使预设备机继续执行作业
调度任务;结束工作进程,并将本端的设备状态
设置为备用状态。
本发明的技术方案解决了作业
调度主备系统切换过程中,切换效率低,影响作
业调度任务正常执行的问题。
权利要求书2页 说明书9页 附图4页CN 110188008 A 2019.08.30
C N 110188008
A
权 利 要 求 书1/2页CN 110188008 A
1.一种作业调度主备切换方法,其特征在于,所述作业调度主备切换方法包括:
以预设时间间隔,获取预设守护进程的属性信息,并对所述属性信息进行安全性检查,得到安全性检查结果;
若所述安全性检查结果为异常,则获取预设备机的设备状态;
若所述预设备机的设备状态为备用状态,则将预设主备切换指令发送到所述预设备机;
暂停工作进程,并从所述工作进程中获取调度信息和作业流信息,其中,所述调度信息和所述作业流信息用于执行作业调度任务;
保存所述调度信息和所述作业流信息;
若接收到所述预设备机返回的确认消息,则将所述调度信息和所述作业流信息发送到所述预设备机,以使所述预设备机继续执行所述作业调度任务;
结束所述工作进程,并将本端的所述设备状态设置为所述备用状态。
2.如权利要求1所述的作业调度主备切换方法,其特征在于,所述保存所述调度信息和所述作业流信息,包括:
检测所述调度信息和所述作业流信息占用的空间大小;
若所述调度信息和所述作业流信息占用的空间大小超过预设阈值,则保存所述作业流信息;
并且,所述若接收到所述预设备机返回的确认消息,则将所述调度信息和所述作业流信息发送到所述预设备机,包括:
若接收到所述预设备机返回的确认消息,则将所述作业流信息发送到所述预设备机。
3.如权利要求1所述的作业调度主备切换方法,其特征在于,所述属性信息包括进程数量和进程标识信息,所述对所述属性信息进行安全性检查,得到安全性检查结果,包括:将所述进程数量与预设数量进行一致性比较,并且将所述进程标识信息与预设标识信息进行一致性比较;
若所述进程数量与预设数量相等,并且所述进程标识信息与所述预设标识信息一致,则所述安全性检查结果为正常;
若所述进程数量与预设数量不相等,或者存在至少一个所述进程标识信息与所述预设标识信息不一致,则所述安全性检查结果为异常。
4.如权利要求1所述的作业调度主备切换方法,其特征在于,所述从所述工作进程中获取调度信息和作业流信息,包括:
获取所述工作进程中的作业标识信息;
从预设作业调度任务配置文件中,获取与所述作业标识信息相对应的所述调度信息和所述作业流信息。
5.如权利要求1所述的作业调度主备切换方法,其特征在于,在所述若接收到所述预设备机返回的确认消息,则将所述调度信息和所述作业流信息发送到所述预设备机,以使所述预设备机继续执行所述作业调度任务之后,并且在所述结束所述工作进程,并将本端的所述设备状态设置为所述备用状态之前,所述作业调度主备切换方法,还包括:删除所述调度信息和所述作业流信息。
6.一种作业调度主备切换装置,其特征在于,所述作业调度主备切换装置,包括:
2。