F28335各个程序代码简单描述
基于f28335呼吸灯c语言代码

基于f28335呼吸灯c语言代码呼吸灯的原理和应用呼吸灯的原理呼吸灯是一种通过改变灯光亮度的效果来呈现灯光闪烁的效果。
它是通过改变灯光亮度的幅值和频率来实现的。
基本原理是在一定的时间内,逐渐增加灯光亮度,然后逐渐减小灯光亮度,以达到灯光像呼吸一样变化的效果。
呼吸灯的应用呼吸灯通常被用于装饰、照明等领域。
例如,它可以用于室内装饰灯、舞台灯光设计等。
同时,呼吸灯也经常被使用在一些电子产品中,如路由器、手机等,用来表示设备工作状态。
TI TMS320F28335简介TI TMS320F28335是一款基于C28x内核的高性能数字信号处理器(DSP)。
它具有高速运算能力和丰富的外设接口,广泛应用于工业控制、电力电子、通信等领域。
该芯片支持大部分C语言编程,并配有专业的开发工具链,如Code Composer Studio,方便开发人员进行软件开发和调试。
基于TI TMS320F28335的呼吸灯实现硬件设计在开始编写呼吸灯的C语言代码之前,我们首先需要设计硬件电路。
以下是所需的硬件组成:•TI TMS320F28335开发板•LED灯•电阻和电容器具体的电路设计如下:1.将LED灯的一个引脚连接到TMS320F28335的GPIO引脚,作为控制信号输出。
2.将LED灯的另一个引脚连接到电源正极。
3.使用电阻和电容器构建一个RC电路,将电阻连接到LED灯的另一端,电容器连接到电源负极。
软件实现在完成硬件设计后,我们可以开始编写C语言代码来实现呼吸灯效果。
以下是所需的步骤:1.配置TMS320F28335的GPIO引脚为输出模式。
2.在无限循环中,逐渐增加LED灯的亮度,在经过一定时间后,逐渐减小LED灯的亮度。
这一过程可以通过改变控制引脚的电平来实现。
3.使用定时器来创建呼吸灯的频率效果。
通过定时器中断,我们可以准确地控制灯光的变化频率。
下面是基于TI TMS320F28335的呼吸灯C语言代码的主要实现部分:#include "DSP2833x_Device.h"// 定义LED灯控制引脚#define LED_GPIO_PIN GPIO0// 初始化GPIO引脚void GPIO_init(){// 将GPIO引脚配置为输出模式EALLOW;GpioCtrlRegs.GPAMUX1.bit.GPIO0 = 0;GpioCtrlRegs.GPADIR.bit.GPIO0 = 1;EDIS;}// 初始化定时器void Timer_init(){// 配置定时器参数CpuTimer0Regs.TCR.bit.TSS = 0; // 启动定时器CpuTimer0Regs.TCR.bit.TRB = 1; // 重载定时器CpuTimer0Regs.PRD.all = 0x1234; // 设置定时周期}// 延时函数void delay(unsigned long count){unsigned long i;for(i = 0; i < count; i++);}// 主函数int main(void){// 系统初始化// 初始化GPIO引脚GPIO_init();// 初始化定时器Timer_init();// 主循环while(1){// 呼吸灯效果for(int i = 0; i < 100; i++){// 增加LED亮度for(int j = 0; j < 100; j++){// 设置引脚为高电平GpioDataRegs.GPASET.bit.LED_GPIO_PIN = 1; delay(100000);}// 减小LED亮度for(int j = 0; j < 100; j++){// 设置引脚为低电平GpioDataRegs.GPACLEAR.bit.LED_GPIO_PIN = 1; delay(100000);}}}}总结本文介绍了基于TI TMS320F28335的呼吸灯的实现过程。
F28335BOOTROM引导模式和程序

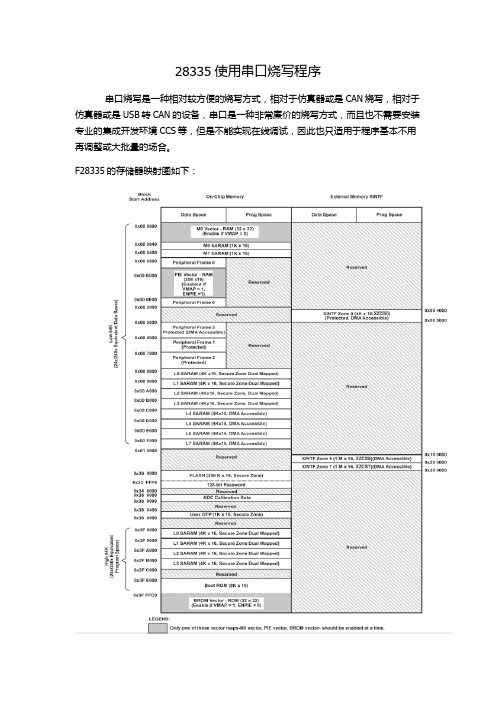
28335使用串口烧写程序串口烧写是一种相对较方便的烧写方式,相对于仿真器或是CAN烧写,相对于仿真器或是USB转CAN的设备,串口是一种非常廉价的烧写方式,而且也不需要安装专业的集成开发环境CCS等,但是不能实现在线调试,因此也只适用于程序基本不用再调整或大批量的场合。
F28335的存储器映射图如下:BOOTROM 是一块8K X 16的只读存储器,位于地址空间0x3FE000~0x3FFFFF,片内BOOTROM在出厂时固化了引导加载程序以的存储映射如下图所示:及定点和浮点数据表,片上BOOTROM1.内BOOT ROM数学表:在BOOT ROM中保留了4K X 16位空间,用以存放浮点和IQ数据公式表,这些数据公式表有助于改善性能和节省SARAM空间。
向量表:CPU向量表位于ROM存储器0x3FE000~0x3FFFFF段内,如下图所示。
复位后,当VMAP=1,ENPIE=0(PIE向量表禁止)时,该向量表激活。
在内部BOOT ROM引导区中能够调用的唯一向量就是位于0x3FFFC0的复位向量。
复位向量在出厂时被烧录为直接指向存储在BOOT ROM 空间中的InitBoot函数,该函数用于开启引导过程。
然后通过通用I/O引脚上的检验判断,决定具体引导模式。
引导模式与控制引脚之间的关系如下图所示:Bootloader特性:Bootloader是位于片上引导ROM中的在复位后执行的程序,用于在上电复位后,将程序代码从外部源转移到内部存储器。
这允许代码暂时存储在掉电不丢失数据的外部存储器内,然后被转移到高速存储器中执行。
引导ROM中的复位向量将程序执行重定向至InitBoot函数。
执行器件初始化之后,bootloader将检查GPIO引脚的状态以确定您需要执行哪种引导模式。
这些选项包括:跳转至闪存、跳转至SARAM、跳转至OTP或调用其中一个片上引导加载例程。
完成选择进程后,如果已完成所需的引导加载,处理器将在所选引导模式确定的应用起点继续执行。
F28335BOOTROM引导模式和程序
在此模式下,引导ROM软件将针对28x操作配置器件,然后直接分支至闪存的0x33FFF6位置。此位置刚好是128位代码安全模块(CSM)密码位置之前。您需要预先在0x33FFF6位置处编写分支指令,以将代码执行重定向至定制的boot-loader或应用代码。
在仅有RAM的器件上,“引导至闪存”将跳转到保留存储器,因此不应当使用此选项。
对CSM密码读取完成后,初始化例程调用模式选择功能函数(SelectBoot),该函数根据GPIO的状态确定处理器引导的方式。一旦完成SelectMode将会把入口地址返回给初始化引导。然后初始化引导函数调用回复CPU寄存器的退出例程(ExitBoot)并退出到由引导模式确定的程序入口地址。
因此我们在使用SCI升级程序时可以分两个步骤,第一个步骤是我们需要一个Bootloader程序,第二个就是我们要升级的程序,BootLoader程序就是我们在选择引导SCI模式之后,SelectBoot之后通过串口加载的第一个程序,待ExitBoot之后会跳转到我们这个bootloader指定的地址开始执行(即将控制权交给我们的这个BootLoader程序),因此我们的BootLoader程序就肩负着串口接收我们的应用程序并将应用程序烧写到FLASH的任务。第二个就是我们的应用程序,这个跟平常的应用程序一样,没有任何区别。
{
//表示的是extended地址高位和低位
data[0] = fgetc(myFile);
data[1] = fgetc(myFile);
CharToByte(data,&addresslinearhigh);
data[0] = fgetc(myFile);
data[1] = fgetc(myFile);
TMSF28335程序设计实例解析

TMSF28335程序设计实例实现功能:AD采样+PI调节+一阶惯性/*****************head file********************/#include DSP2833x_Device.h#include DSP2833x_Examples.h/****************macro*****************/#define S1 AdcRegs.ADCST.bit.INT_SEQ1/***************global variable************/float this_zl;float upon_zl;int PIn=0; //symbol parameterint SCn=0; // symbol parameterfloat adclo=0; //AD referenced voltagefloat adcres=65536;float Ta; //一阶系统时间常数float temp=0.950213;int sc_D;float mf_scz;float mf_sc; //outputunsigned int * Sda;float power_set;float power_get; // actual output voltagefloat KP_wr; //PI proportion coefficientfloat KI_wr; //PI integral coefficientfloat error_sg; //PI correlative parameterfloat error_1;float error_2;/****************function*******************/interrupt void cpu_timer0_isr(void;interrupt void ad_isr(void;void Init_Timer0(void;void Init_Xintf(void;void Init_Gpio(void; //GPIO initialization program void Initadc(void; //AD initialize float PI_T(float power_sd,float pow_in; //PI control functionvoid delay_ys(void; //delay subprogram/***************main function**********************/void main(void{unsigned int * Sda =(unsigned int * 0x200000; //define DA address,XINTF Zone7 InitSysCtrl(; // initialize system subprogramInit_Timer0(;DINT;InitPieCtrl(;IER=0x0000;IFR=0x0000;InitPieVectTable(;Init_Gpio(;Initadc(;Init_Xintf(;CpuTimer0Regs.TCR.bit.TIE=1;EALLOW; // 解除寄存器保护PieVectTable.TINT0=&cpu_timer0_isr; //用CUP_Timer0中断函数入口更新//PIE向量表PieVectTable.ADCINT=&ad_isr; //用AD中断函数更新PIE向量表EDIS; //使能寄存器保护ConfigCpuTimer(&CpuTimer0,150,500; //timing 500usStartCpuTimer0(;PieCtrlRegs.PIEIER1.all=0x60; //使能PIE内的CUP_Timer0和AD//中断IER |=0x0001; // 使能CPU INT 1EINT;}*****************CPU timerinitialization***********************************void Init_Timer0(void{CpuTimer0Regs.PRD.all=75000; //set timer period timing:500usCpuTimer0Regs.TPR.all=0;CpuTimer0Regs.TPRH.all=0;//CpuTimer0Regs.TCR.bit.TSS=1; //stop timer}********************A/Dinitialization**********************************void Initadc(void{long i; //AD initializeAdcRegs.ADCTRL1.bit.RESET=1;for(i=0;i<100;i++ {};AdcRegs.ADCTRL1.bit.RESET=0;AdcRegs.ADCTRL1.bit.SUSMOD=0;AdcRegs.ADCTRL1.bit.ACQ_PS=0; //setting sample windowAdcRegs.ADCTRL1.bit.CPS=0;AdcRegs.ADCTRL1.bit.CONT_RUN=0; //启动-停止模式AdcRegs.ADCTRL1.bit.SEQ_CASC=0; //AdcRegs.ADCTRL3.bit.ADCBGRFDN=3; //给ADC模块的内部基准电路上电for(i=0;i<400000;i++ {}; //delay more than 7msAdcRegs.ADCTRL3.bit.ADCPWDN=1; //给ADC模块的其余模拟电路上电for(i=0;i<10000;i++ {}; //delay more than 20usAdcRegs.ADCTRL3.bit.ADCCLKPS=10;AdcRegs.ADCTRL3.bit.SMODE_SEL=0; //choose sample styleAdcRegs.ADCMAXCONV.all=0x0000;AdcRegs.ADCCHSELSEQ1.bit.CONV00=0x0000;AdcRegs.ADCST.bit.INT_SEQ1_CLR=1;AdcRegs.ADCTRL2.bit.RST_SEQ1=1; //复位排序器1AdcRegs.ADCTRL2.bit.INT_ENA_SEQ1=1; //SEQ1 interruptAdcRegs.ADCTRL2.bit.INT_MOD_SEQ1=0; //choose interrupt style}*********************external peripheralsinitialization****************************** void Init_Xintf(void{EALLOW;XintfRegs.XINTCNF2.bit.XTIMCLK=1;XintfRegs.XTIMING6.bit.XWRLEAD=3;XintfRegs.XTIMING6.bit.XWRACTIVE=7;XintfRegs.XTIMING6.bit.XWRTRAIL=3;XintfRegs.XTIMING6.bit.XRDLEAD=3;XintfRegs.XTIMING6.bit.XRDACTIVE=7;XintfRegs.XTIMING6.bit.XRDTRAIL=3;XintfRegs.XTIMING6.bit.X2TIMING=0;EREADY=0;XintfRegs.XTIMING6.bit.XSIZE=3;EDIS;}********************************I/Oinitialization******************************* void Init_Gpio(void{EALLOW; //GPIO initializeGpioCtrlRegs.GPBMUX1.all=0xFFFFFC00; //设置B口为地址线以及DAC片选信号GpioCtrlRegs.GPCMUX1.all=0xFFFFFFFF; //set C Port as date address GpioCtrlRegs.GPAMUX1.all=0x0000;GpioCtrlRegs.GPADIR.all= 0x0003;GpioDataRegs.GPADA T.all= 0x0003;GpioDataRegs.GPACLEAR.all= 0x0003; //choose GPIO1,2 as DA signal address EDIS;}****************************PIfunction****************************************** portalparameter:power_sdand pow_inexport parameter:this_zlfloat PI_T(float power_sd,float power_in{error_1 = error_sg;error_sg = power_sd - power_in;error_2 = error_sg - error_1;if(PIn == 0{error_2 = 4.0; //avoid error_2 too largePIn++;}this_zl = KP_wr*error_sg + KI_wr*error_2;error_sg = error_1;return this_zl;}*******************************Delayfunction*********************************** void delay_ys(void{long i;for(i=0;i<100000;i++ {};}*************************timer 0 interrupt dealfunction***********************interrupt void cpu_timer0_isr(void{DINT;StopCpuTimer0(;CpuTimer0Regs.TCR.bit.TIF=1; //清CPU定时器0的中断标志PieCtrlRegs.PIEACK.all |=0x0001; //使能第一组中断以使AD产生的中断能// 被CPU响应AdcRegs.ADCTRL2.bit.SOC_SEQ1=1; //使能排序器,启动AD转换EINT;while(S1==0 {}; //等待AD转换的完成delay_ys(;}************************AD interruptfunction*********************************interrupt void ad_isr(void{DINT;AdcRegs.ADCTRL2.bit.RST_SEQ1=1;power_get=((floatAdcRegs.ADCRESULT0*3.0/adcres + adclo; //对采样数据进行转换if(SCn == 0{mf_scz = 2.5;SCn++;}mf_sc=mf_scz;upon_zl=PI_T( power_get, mf_sc; //调用PI环节的函数mf_sc=1/Ta * upon_zl * temp; //通过一阶惯性环节的处理delay_ys(;mf_scz=mf_sc;sc_D=(int(mf_sc * 4096/5;* (Sda = sc_D; //写数据到DA的数据线AdcRegs.ADCST.bit.INT_SEQ1_CLR=1;PieCtrlRegs.PIEACK.all |=0x0001; //使能第一组中断EINT;StartCpuTimer0(; //启动定时器0,开始下一次采样}。
TMS320F28335中文资料(难得的资料)
EALLOW; // This is needed to write to EALLOW protected registers
PieVectTable.XINT2 = &ISRExint; //告诉中断入口地址
EDIS; // This is needed to disable write to EALLOW protected registers
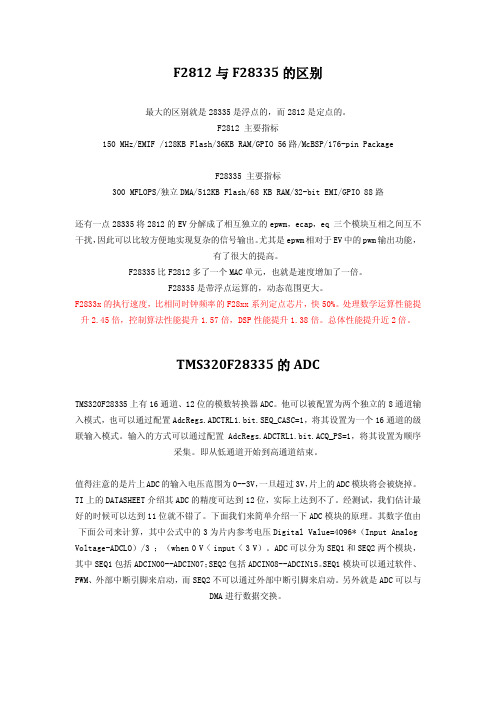
F28335 是带浮点运算的,动态范围更大。 F2833x 的执行速度,比相同时钟频率的 F28xx 系列定点芯片,快 50%。处理数学运算性能提
升 2.45 倍,控制算法性能提升 1.57 倍,DSP 性能提升 1.38 倍。总体性能提升近 2 倍。
TMS320F28335 的 ADC
TMS320F28335 上有 16 通道、12 位的模数转换器 ADC。他可以被配置为两个独立的 8 通道输 入模式,也可以通过配置 AdcRegs.ADCTRL1.bit.SEQ_CASC=1,将其设置为一个 16 通道的级 联输入模式。输入的方式可以通过配置 AdcRegs.ADCTRL1.bit.ACQ_PS=1,将其设置为顺序
{
EALLOW; // Before setting PLLCR turn off missing clock detect logic
SysCtrlRegs.PLLSTS.bit.MCLKOFF = 1; SysCtrlRegs.PLLCR.bit.DIV = val; EDIS;
// Optional: Wait for PLL to lock. // During this time the CPU will switch to OSCCLK/2 until // the PLL is staPU will
[原]TMS320F28335项目开发记录6_28335之cmd文件详解
![[原]TMS320F28335项目开发记录6_28335之cmd文件详解](https://img.taocdn.com/s3/m/911b8f5bcf84b9d528ea7a16.png)
[原]TMS320F28335项目开发记录6_28335之cmd文件详解2014-11-3阅读970 评论01.CMD文件的作用CMD文件的作用就像仓库的货物摆放记录一样,为程序代码和数据分配指定的空间。
2.C语言生成的段C语言生成的段大致分为两大类:初始化和未初始化,已初始化的段含有真正的指令和数据,未初始化段只是保留变量的地址空间。
已初始化段通常放在程序空间,未初始化段通常放在数据空间。
已初始化段:.text——C语言编译生成的汇编指令代码存放于此.cinit——存放初始化的全局和静态变量.const——字符串常量和const定义的全局和静态变量.econst——字符串常量和far const定义的全局和静态变量.print——全局构造器(C++)程序列表.switch——存放switch语句产生的常数表格以.const段为例:const int a = 10; //注意必须是全局的如果声明为局部const初始化变量,不会放在.const段,局部变量都是运行时放在.bss段中char * p = "ABC";数组和结构体的初始值——是局部变量时,产生的是.const,如果是全局变量,产生的是.cinit未初始化段:.bss——为全局变量和局部变量保留的空间,程序上电时,.cinit空间中的数据复制出来并存放在.bss空间中.ebss——为使用大寄存器模式时预留的全局和局部变量空间,程序上电时,.cinit空间中的数据复制出来并存放在.bss空间中.stack——堆栈空间,主要用于函数传递变量或为局部变量分配空间.system——为动态存储分配保留的空间(malloc),如果有宏函数,此空间被占用.esystem——为动态存储分配保留的空间(far malloc),如果有far函数,此空间会被占用3.自定义段上面的都是官方预先定义好的,我们可以定义自己的段么?可以,使用如下语句:#pragma CODE_SECTION(symbol, "section name");#pragma DATA_SECTION(symbol, "section name");symbol——符号,可以是函数名/变量名section name——自定义的段名CODE_SECTION用来定义代码段DATA_SECTION用来定义数据段注意:不能再函数体内声明#pragma;必须在符号被定义和使用之前声明#pragma例子:#pragma DATA_SECTION(data, "data_name");char data[100];4.CMD文件在DSP28335工程文件里(不用BIOS产生CMD文件),手写CMD文件一般有两个,RAM里调试时用的两个CMD文件分别为DSP2833x_Headers_nonBIOS.cmd 和28335_RAM_lnk.cmd,烧写到flash里时用的两个CMD文件分别为DSP2833x_Headers_nonBIOS.cmd和F28335.cmd,其中DSP2833x_Headers_nonBIOS.cmd文件可以在所有工程文件中通用,主要作用是把外设寄存器产生的数据段映射到对应的存储空间,可以跟DSP2833x_GlobalVariableDefs.c文件对照一下看看。
DSP第5章-F28335-概述
3个32位CPU定时器:定时器0、1、2。T0、T1为一般定时器 ,T0连接至PIE,T1连接至中断INT13,T2用作DSP/BIOS的
5.1 F28335的性能
串行端口外设:2个eCAN2.0B; 3个SCI(UART);2个 McBSP;1个SPI; 1个I2C总线接口。
16通道12位模数转换模块:转换时间80ns,2X8通道复用输入 接口;2个采样保持电路;单/连续通道转换;内部或外部参考电 压
5.5 总结
外设帧的寄存器映射如下图所示。
5.5 总结
外设帧的寄存器映射如下图所示。
5.6 F28335与F2812的比 较
5.6 F28335与F2812的比 较
5.3.5 Flash的流水线模式
可提高Flash中线性代码的执行效率 对FOPT寄存器中的ENPIPE置位来使能流水线模式 独立于CPU的流水线模式
5.3.6 Flash 和OTP的寄存器
F28335BOOTROM引导模式和程序
28335使用串口烧写程序串口烧写是一种相对较方便的烧写方式,相对于仿真器或是CAN烧写,相对于仿真器或是USB转CAN的设备,串口是一种非常廉价的烧写方式,而且也不需要安装专业的集成开发环境CCS等,但是不能实现在线调试,因此也只适用于程序基本不用再调整或大批量的场合。
F28335的存储器映射图如下:BOOTROM 是一块8K X 16的只读存储器,位于地址空间0x3FE000~0x3FFFFF,片内BOOTROM在出厂时固化了引导加载程序以及定点和浮点数据表,片上BOOTROM的存储映射如下图所示:1.内BOOT ROM数学表:在BOOT ROM中保留了4K X 16位空间,用以存放浮点和IQ数据公式表,这些数据公式表有助于改善性能和节省SARAM空间。
向量表:CPU向量表位于ROM存储器0x3FE000~0x3FFFFF段内,如下图所示。
复位后,当VMAP=1,ENPIE=0(PIE向量表禁止)时,该向量表激活。
在内部BOOT ROM引导区中能够调用的唯一向量就是位于0x3FFFC0的复位向量。
复位向量在出厂时被烧录为直接指向存储在BOOT ROM 空间中的InitBoot函数,该函数用于开启引导过程。
然后通过通用I/O引脚上的检验判断,决定具体引导模式。
引导模式与控制引脚之间的关系如下图所示:Bootloader特性:Bootloader是位于片上引导ROM中的在复位后执行的程序,用于在上电复位后,将程序代码从外部源转移到内部存储器。
这允许代码暂时存储在掉电不丢失数据的外部存储器内,然后被转移到高速存储器中执行。
引导ROM中的复位向量将程序执行重定向至InitBoot函数。
执行器件初始化之后,bootloader将检查GPIO引脚的状态以确定您需要执行哪种引导模式。
这些选项包括:跳转至闪存、跳转至SARAM、跳转至OTP或调用其中一个片上引导加载例程。
完成选择进程后,如果已完成所需的引导加载,处理器将在所选引导模式确定的应用起点继续执行。
F28335头文件说明

TMS320F2833X/2823X头文件函数(一)TI提供的SPR530(C2833x/C2823x C/C++ 头文件和外设示例)使我们非常方便的使用2833X和2823X 的外设。
下面就它定义的函数加一个说明。
// $TI Release: DSP2833x Header Files V1.10 $// $Release Date: February 15, 2008 $//**************在DSP2833x_Adc.c中定义的,共1个函数**************************//void InitAdc(void);//在DSP2833x_Adc.c中定义,初始化ADC,使能ADCCLK,调入ADC的出厂刻度数据,上电。
//**************在DSP2833x_DMA.c中定义的,共37个函数**************************//void DMAInitialize(void);//执行DMA硬件复位,设置DMA不受仿真器的影响。
// DMA Channel 1void DMACH1AddrConfig(volatile Uint16 *DMA_Dest,volatile Uint16 *DMA_Source);//设置DMA的源和目标void DMACH1BurstConfig(Uint16 bsize, int16 srcbstep, int16 desbstep);//设置每次Burst的字节数、源地址增量、目标地址增量。
注意对于28335,BYTE和WORD是一样的,都是16BIT。
void DMACH1TransferConfig(Uint16 tsize, int16 srctstep, int16 deststep);//设置每次传送包含多少个Burst、传送完毕发中断,源地址增量、目标地址增量void DMACH1WrapConfig(Uint16 srcwsize, int16 srcwstep, Uint16 deswsize, int16 deswstep);//设置传送完毕的源地址和目标地址void DMACH1ModeConfig(Uint16 persel, Uint16 perinte, Uint16 oneshot, Uint16 cont, Uint16 synce, Uint16 syncsel, Uint16 ovrinte, Uint16 datasize, Uint16 chintmode, Uint16 chinte);//设置DMA工作模式,包括触发源、是否使能触发源、是否使能oneshot模式、是否使能Continuous模式、是否使能外围设备同步、选择同步模式、溢出中断等。
tms320f28335编程实例

tms320f28335编程实例【原创实用版】目录1.TMS320F28335 简介2.TMS320F28335 编程实例的基本步骤3.TMS320F28335 编程实例的具体实现4.总结正文【1.TMS320F28335 简介】TMS320F28335 是一款 32 位定点数字信号处理器(DSP),广泛应用于各种实时控制系统中,如通信、音频处理、图像处理等领域。
TMS320F28335 具有高速、高效的运算能力,可实现大规模数据的快速处理。
同时,它还具有丰富的外设接口,方便与其他硬件设备相连。
【2.TMS320F28335 编程实例的基本步骤】编写 TMS320F28335 编程实例的基本步骤如下:(1)了解 TMS320F28335 的硬件结构和功能,确定处理器的工作模式。
(2)编写程序,实现所需功能。
编写程序时,需要使用 TMS320F28335 的编程语言,如 C 语言或汇编语言。
(3)将编写好的程序下载到 TMS320F28335 处理器中,进行运行测试。
(4)根据实际运行情况,对程序进行调试和优化,以满足实际应用需求。
【3.TMS320F28335 编程实例的具体实现】以一个简单的音频处理为例,具体实现如下:(1)首先,了解 TMS320F28335 的硬件结构,确定工作模式。
在本例中,我们使用 TMS320F28335 作为音频信号处理器,需要启用相应的外设接口,如串行通信接口、音频输入输出接口等。
(2)编写程序。
本例中,我们需要编写一个音频信号处理算法,如音频放大。
首先,我们需要配置 TMS320F28335 的音频输入输出接口,使其与外部音频设备相连。
然后,编写音频信号放大的算法,实现音频信号的实时处理。
(3)将编写好的程序下载到 TMS320F28335 处理器中,进行运行测试。
在测试过程中,我们需要对音频输入输出接口进行配置,以满足实际应用需求。
同时,通过观察音频信号处理结果,评估算法的性能。
dspf28335启动过程

dspf28335启动过程1.DSP reset后运行的起始地址是多少?0x3FFFC02.仿真器烧写程序的步骤是?根据cmd文件把程序烧到指定位置,然后执行。
3.DSP的Flash启动过程是什么?首先硬件配置GPIO84~87上拉为1,即处于Flash启动过程。
当DSP复位后,会从复位向量0x3FFFC0处取得复位向量,并跳转到InitBoot处开始执行,InitBoot会读GPIO84~87的值发现全为1判断为Flash启动方式。
然后会跳到0x33FFF6处执行。
在CCS5.2工程的cmd文件中有如下代码:MEMORY{PAGE 0 :BEGIN : origin = 0x33FFF6, length = 0x000002 /* Boot to M0 will go here */...}SECTIONS{...codestart : > BEGIN PAGE = 0...}即表示把codestart段放到0x33FFF6位置处,文件“DSP2833x_CodeStartBranch.asm”中有codestart段的定义,实际上codestart段只是包含了一个跳转指令,是程序跳转到_c_int00处,_c_int00在boot.asm in RTS library中有定义,_c_int00的代码最终会调用c的main 函数,之后就是main函数的执行。
总的就是:Reset(0x3fffc0)—>initBoot()—>判断启动方式—>codestart(0x33fff6)—>_c_int00—>main函数4.F28335如何烧写代码到flash中并运行?首先使用添加C:\ti\controlSUITE\device_support\f2833x\v133\DSP2833x_com mon\cmd\F28335.cmd。
此文件即为配置代码到flash中的TI官方配置文件。
F28335EPWM各模块简介
F28335EPWM各模块简介F28335 EPWM各模块简介以DSP为基础的数字信号控制器(DSC)执行电动马达相位控制时,其核心组件为事件管理器(Event Manager)。
由于以DSP为基础的控制器应用范围正逐渐扩大到高效能电子产品的触发与控制等各种相关领域,因此这类事件管理器也需要一套全新架构。
以德州仪器(TI)基于DSP的24x和F28x数字信号控制器来看,事件管理器是由DSP 的可程式逻辑电路构成,以便产生脉冲宽度调变(PWM)信号。
这些事件管理器虽然是为了三相系统所设计,却拥有极大弹性,可以高效率应用在多相位或其它特殊需求应用(或许再加上一些软件)。
事件管理器的功能已通过数个世代的处理器考验与测试,只需要进行一些细部调整即可。
针对新的应用需求,TI开发出一套称为加强型事件管理器(eEVM)的架构,将应用于F28x衍生系列的新元件,包括TMS320F2801、TMS320F2806和TMS320F2808控制器(TMS320F2801已实作部份功能)。
加强型事件管理器的PWM产生方式与过去有很大差异。
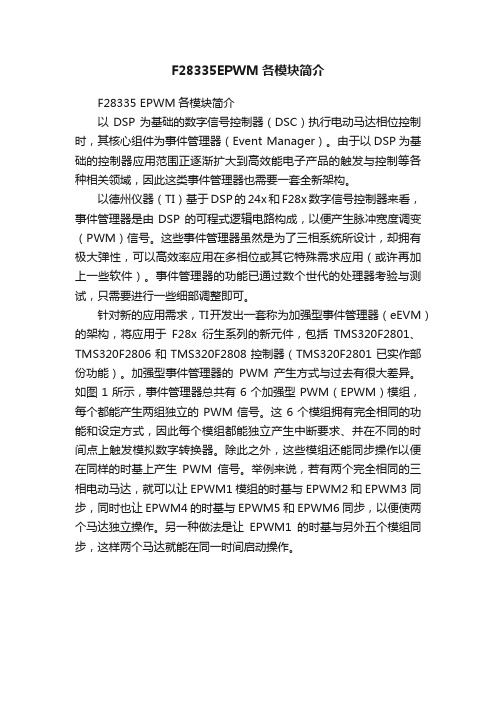
如图1所示,事件管理器总共有6个加强型PWM(EPWM)模组,每个都能产生两组独立的PWM信号。
这6个模组拥有完全相同的功能和设定方式,因此每个模组都能独立产生中断要求、并在不同的时间点上触发模拟数字转换器。
除此之外,这些模组还能同步操作以便在同样的时基上产生PWM信号。
举例来说,若有两个完全相同的三相电动马达,就可以让EPWM1模组的时基与EPWM2和EPWM3同步,同时也让EPWM4的时基与EPWM5和EPWM6同步,以便使两个马达独立操作。
另一种做法是让EPWM1的时基与另外五个模组同步,这样两个马达就能在同一时间启动操作。
图1:F2808控制器的加强型事件管理器共有6个EPWM模组EPWM模组的架构如图2所示,每个模组都包含数个次模组。
如果要产生PWM信号,至少需要连接一个计时器和相关逻辑电路,以便在可程式设定的不同时间产生事件。
DSP28335很好的资料

TMS320F28335 TechV_28335目录1DSP的PWM信号 (1)1.1简介 (1)1.2端口对应关系 (2)1.3初始化程序注释 (2)2DSP的CAN通信 (4)2.1CAN2.0B协议简述 (4)2.2CAN总线电平 (5)2.3CAN总线上的120欧电阻 (6)2.4DSP的CAN时钟模块 (6)2.5邮箱初始化例程注解 (7)2.6消息发送和接收 (8)2.7CAN的适配器存在的一些问题 (9)3DSP的32位浮点运算测试 (10)4DSP定时器中断 (11)4.1DSP28335的定时器 (11)4.2定时器分频 (11)4.3计数器计数 (12)4.4定时器时钟周期 (12)5DSP看门狗复位 (12)5.1看门狗时钟 (12)5.2看门狗系统控制和状态寄存器(SCSR) (13)5.3看门狗计数寄存器(WDCNTR) (13)5.4看门狗重启管理器(WDKEY) (14)5.5看门狗控制寄存器(WDCR) (14)6软件报错与处理 (15)6.1CCS Setup中仿真器的配置 (15)6.2Connect报错——1145——换仿真器解决 (17)6.3CAN口测试A发B收,数据发不出去 (19)6.4编译Pwm测试文件出错 (19)6.5could not open source file "DSP2833x_Device.h (20)7备注与注意事项 (22)8附录C源程序 (22)8.1PWM初始化及脉冲产生函数 (22)8.2邮箱初始化函数 (33)8.3浮点运算测试函数 (36)8.4定时器中断初始化函数 (38)8.5采用定时器的延时函数 (39)8.6看门狗初始化函数 (40)1DSP的PWM信号1.1简介DSP28335共12路16位的ePWM,能进行频率和占空比控制。
ePWM的时钟TBCLK=SYSCLKOUT/(HSPCLKDIV×CLKDIV):PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。
TMS320F28335 DSP—CMD解读

摘要
这个应用报告和相关的代码提供了一种把编译后的程序段从 TMS320F28xxx 的 flash 复制到 ram 的功能,这样可以提高代码的运行速度。这个解决方案在直接启动 之后,进入 c_int00 ——C 语言代码运行之前实现此功能。
本应用报告中所讨论的项目内容和源代码可以从以下网址下载:http://www-s.ti. com/sc/techlit/spraau8.zip
现在提供的解决方案,使得设计者能够在运行时把被编译器初始化的代码段从 flash 复制到 ram 里,获得最大的运行速度。这使代码执行从多达 15 个等待状态的提升到 0 等待状态。另一种解决方案是只将某些函数从 Flash 复制到 RAM。详见:《Runn ing an Application from Internal Flash Memory on the TMS320F28xx DSP》 (SPRA958)。这种方法应该使用在大多数使用 C2000™ DSC 的应用上,其他要求严 格的时序和连续的零等待状态的应用程序应采用这里提出的解决方案。
CPU_TIMER0 存储空间通过 MEMORY 伪指令指示了其起始地址和长度,也就等于间接确 定了结构体 CpuTimer0Regs 的具体位置,所以通过以上几层映射关系,当向 CpuTimer0Regs. TIM.all 写数据时就可以准确的写入 DSP 内部寄存器所在的存储器的位置。由此看见,CMD 的作用就是为程序代码和数据分配存储空间。本节先针对 DSP2833x_Headers_nonBIOS.cmd 文件做一下解读,后续再分别解读一下 CMD 用于调试和烧写时需要注意哪些问题。
PAGE 1 : RAMM
: origin = 0x000400, length = 0x000400
关于28335各个模块的理解解析

PWM的使用// Configure ePWM1// Setup TBCLKEPwm1Regs.TBPRD = EPWM_TIMER_TBPRD;// Set timer period 1500/2 TBCLKsEPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0EPwm1Regs.TBCTR = 0x0000; // Clear counter// Set Compare valuesEPwm1Regs.CMPA.half.CMPA = EPWM_CMPAB; // Set compare A value// EPwm1Regs.CMPB = EPWM_CMPAB; // Set Compare B value// Setup counter modeEPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up downEPwm1Regs.TBCTL.bit.PHSEN = TB_ENABLE; // enable phase loading use for sync EPwm1Regs.TBCTL.bit.PHSDIR=TB_UP;EPwm1Regs.TBCTL.bit.SYNCOSEL=TB_SYNC_IN;EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2+TB_DIV4+TB_DIV4; // TBClock ratio = SYSCLKOUT/(2*HSPCLKDIV*EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1; // 2^CLKDIV)// Setup shadowingEPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;// EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero// EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;// Set actionsEPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM1A on event A, up count EPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR; // Clear PWM1A on event A, down count// EPwm1Regs.AQCTLB.bit.CAU = AQ_CLEAR; //Clear PWM1B on event A, up count // EPwm1Regs.AQCTLB.bit.CAD = AQ_SET; // Set PWM1B on event A, down count// Set DeadBandEPwm1Regs.DBCTL.bit.IN_MODE=DBA_ALL;EPwm1Regs.DBCTL.bit.POLSEL=DB_ACTV_HIC;EPwm1Regs.DBCTL.bit.OUT_MODE=DB_FULL_ENABLE;EPwm1Regs.DBRED=Dbred; // Dead-band rising edge delayEPwm1Regs.DBFED=Dbfed; // Dead-band falling edge delay// Set Trip ZoneEPwm1Regs.TZSEL.bit.OSHT1=TZ_ENABLE;EPwm1Regs.TZCTL.bit.TZA=TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB=TZ_FORCE_LO;// Interrupt where we will change the Compare ValuesEPwm1Regs.ETSEL.bit.SOCBSEL= ET_CTR_ZERO;// Select start ADC (EPWMxSOCB) on Zero eventEPwm1Regs.ETSEL.bit.SOCBEN= Enable; // EnableEPwm1Regs.ETPS.bit.SOCBPRD=ET_1ST;主要注意的就是EPWM的死区子模块。
基于f28335的simulink代码生成
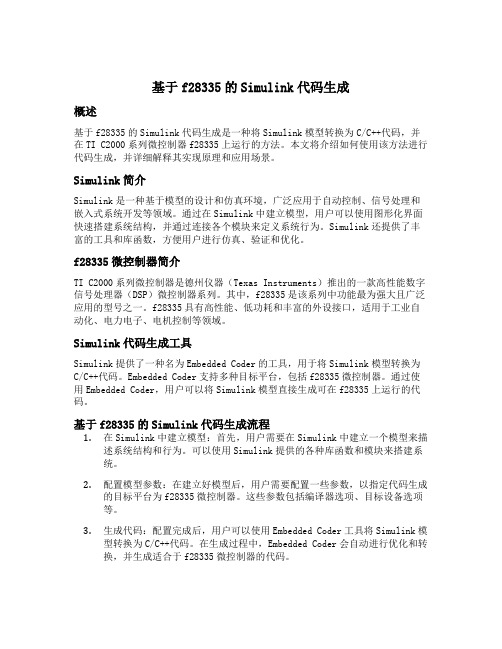
基于f28335的Simulink代码生成概述基于f28335的Simulink代码生成是一种将Simulink模型转换为C/C++代码,并在TI C2000系列微控制器f28335上运行的方法。
本文将介绍如何使用该方法进行代码生成,并详细解释其实现原理和应用场景。
Simulink简介Simulink是一种基于模型的设计和仿真环境,广泛应用于自动控制、信号处理和嵌入式系统开发等领域。
通过在Simulink中建立模型,用户可以使用图形化界面快速搭建系统结构,并通过连接各个模块来定义系统行为。
Simulink还提供了丰富的工具和库函数,方便用户进行仿真、验证和优化。
f28335微控制器简介TI C2000系列微控制器是德州仪器(Texas Instruments)推出的一款高性能数字信号处理器(DSP)微控制器系列。
其中,f28335是该系列中功能最为强大且广泛应用的型号之一。
f28335具有高性能、低功耗和丰富的外设接口,适用于工业自动化、电力电子、电机控制等领域。
Simulink代码生成工具Simulink提供了一种名为Embedded Coder的工具,用于将Simulink模型转换为C/C++代码。
Embedded Coder支持多种目标平台,包括f28335微控制器。
通过使用Embedded Coder,用户可以将Simulink模型直接生成可在f28335上运行的代码。
基于f28335的Simulink代码生成流程1.在Simulink中建立模型:首先,用户需要在Simulink中建立一个模型来描述系统结构和行为。
可以使用Simulink提供的各种库函数和模块来搭建系统。
2.配置模型参数:在建立好模型后,用户需要配置一些参数,以指定代码生成的目标平台为f28335微控制器。
这些参数包括编译器选项、目标设备选项等。
3.生成代码:配置完成后,用户可以使用Embedded Coder工具将Simulink模型转换为C/C++代码。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
mcbsp_loopback_interrupts
McBSP通信实验(通过中断方法自发自收)
mcbsp_spi_loopback
McBSP作为SPI通信实验
sci_autobaud
SCI通信实验1(自动波特率)
sci_echoback
SCI通信实验2
scia_loopback
CAN通信实验(自发自收)
ecap_apwm
CAP实验(APWM)
ecap_capture_pwm
CAP实验
epwm_deadband
PWM实验(带死区)
epwm_dma
PWM实验(通过DMA传输数据)
epwm_timer_interrupts
PWM实验(定时中断)
epwm_trip_zone
PWM跳闸保护实验
epwm_up_aq
PWM向上计数实验
epwm_updown_aq
PWM中心对称计数实验
eqep_freqcal
QEP脉冲频率测量实验
eqep_pos_speed
QEP位置速度脉冲测量实验
external_interrupt
外部中断实验
external_interrupt_hanyuan
外部中断实验
上海汉远科技F28335各个程序代码的保存路径在
Code of TMS320F28335 CCS4\v120\DSP2833x_examples文件夹下面
文件名
描述
adc_dma
ADC模块采样通过DMA传输数据实验
adc_seq_ovd_test
ADC模块在排序器覆盖模式下采样实验
adc_seqmode_test
ADC模块在排序器模式下采样实验
adc_soc
ADC模块触发SOC实验
cpu_timer
CPU定时器中断实验
dma_ram_to_ram
DMA从RAM传输数据到另一个RAM
dma_xitf_to_ram
DMA从外扩RAM传输数据到内部RAM
ecan_a_to_b_xmit
CAN通信实验
ecan_back2back
SCI通信实验3(自发自收)
scia_loopback_interrupts
SCI通信实验4(通过中断方式自发自收)
spi_loopback
SPI通信实验(自发自收)
spi_loopback_interrupts
SPI通信实验(通过中断自发自收)
sw_prioritized_interrupts
软件中断实验
watchdog
看门狗实验
xintf_flash_sst
外扩FLASH芯片SST39VF800读写实验
xintf_run_from
外扩RAM芯片IS61LV256读写实验
i2c_eeprom
I2C通信实验
lpm_haltwake
低功耗模式haltwake实验
lpm_idlewake
低功耗模式idlewake实验
lpm_standbywake
低功耗模式standbywake实验
mcbsp_loopback
McBSP通信实验(自发自收)
mcbsp_loopback_dma
flash
DSP片内FLASH烧写实验
fpu
浮点运算实验(带小数点)
gpio_setup
GPIO寄存器配置实验
gpio_toggle
GPIO输出电平翻转实验
hrpwm
高分辨率PWM实验1
hrpwm_sfo
高分辨率PWM实验2hrp来自m_sfo_v5高分辨率PWM实验3
hrpwm_slider
高分辨率PWM实验4