choosing multiple parameters for support vector machines
GAUSSION计算常见错误及解决方案

【原创】GAUSSION计算常见错误及解决方案★★★★★★★★★★fegg7502(金币+3,VIP+0):thank you very much! 9-22 23:49zeoliters(金币+2,VIP+0):谢谢分享!9-22 21:56dongdong3881(金币+3,VIP+0):感谢10-28 14:04luoqiquan(金币+2,VIP+0):很好很强大12-23 22:35初学Gaussian03常见出错分析最初级错误1. 自旋多重度错误2. 变量赋值为整数3. 变量没有赋值4. 键角小于等于0度,大于等于180度5. 分子描述后面没有空行6. 二面角判断错误,造成两个原子距离过近7. 分子描述一行内两次参考同一原子,或参考原子共线运行出错1. 自洽场不收敛 SCFa. 修改坐标,使之合理b. 改变初始猜 Guessc. 增加叠代次数SCFCYC=Nd. iop(5/13=1)2. 分子对称性改变a. 修改坐标,强制高对称性或放松对称性b. 给出精确的、对称性确定的角度和二面角c. 放松对称性判据 Symm=loosed. 不做对称性检查iop(2/16=1)3. 无法写大的Scratch文件RWFa. 劈裂RWF文件%rwf=loc1,size1,loc2,size2,……..,locN,-1b. 改变计算方法MP2=Direct可以少占硬盘空间c. 限制最大硬盘maxdisk=N GB4. FOPT出错原因是变量数与分子自由度数不相等。
可用POPT 或直接用OPT5. 优化过渡态只能做一个STEP 原因是负本征数目不对添加iop(1/11)=16. 组态相互作用计算中相关能叠代次数不够,增加叠代次数QCISD(Maxcyc=N)Default.Rou设置•在Scratch文件夹中的Default.Rou文件中设置G03程序运行的省缺参数:• -M- 200MW•-P- 4•-#- MaxDisk=10GB•-#- SCF=Conventional or Direct•-#- MP2=NoDirect or Direct•-#- OPTCYC=200•-#- SCFCYC=200•-#- IOPs 设置如iop(2/16=1)Default.Rou设置中的冲突•Default route: MaxDisk=2GB SCF=Direct MP2=Direct OPTCYC=200 SCFcyc=100 iop(2/16=1) iop(5/13=1)• ------------------• # ccsd/6-31G** opt• ------------------• L903/L905 and L906 can only do MP2.问题在于,MP2=Direct!去掉这个设置,CCSD的作业就能进行了。
关于Maxwell参数化扫描时添加calculations报错的说明

关于Maxwell参数化扫描时添加calculations报错的说明当需要考查某一物理量改变时,对其他量的影响,这时需要用到参数化扫描的功能。
以同步发电机为例,常常需要考察不同励磁电流下,空载电压的大小,以便绘制空载特性曲线。
这时,可以将励磁电流作为变量,然后扫描之,具体操作为:右键Optimetrics,选择add parametric,通过add定义励磁电流变化范围。
在calculations里面,点击左下角setup calculations,report type选择transient,parameter选择moving1,category选择winding,quantity 选择A相induced voltage,function选择none。
这时,点击add calculation,done,就会发现出现红叉叉,系统提示“calculation must be a dimension reducing ranged function,when using solution'setup1:transient'”。
之所以出现这个错误,原因就在于定义的A相induced voltage是一个函数,是随时间变化的量,而软件要求A相induced voltage也就是calculation expression必须是“single, real number”,因此在上述操作的基础上,还需点击右上角的Range function,category选择math,function选择rms,点击ok。
这时,再add calculation,done,就正确了。
以上操作的目的是,通过扫描励磁电流和A相电压有效值的关系,实现了绘制同步发电机空载特性曲线的功能。
现在,该知道错在哪里,以及如何避免出错了吧?其实,setup calculations功能完全多此一举,即使这个地方不设置,求解完成后,后处理一样可以得到表达式与扫描量的关系,不会的同学可自己试着发掘一下Maxwellhelp文件为Maxwell2D/3D的瞬态求解设置铁芯损耗一、铁损定义(coreloss definition)铁损的计算属性定义(CalculatingPropertiesforCoreLoss(BPCurve)要提取损耗特征的外特性(BP曲线),先在View/EditMaterial对话框中设置损耗类型(CoreLoss Type)是硅钢片(ElectricalSteel)还是铁氧体(PowerFerrite)。
Fluent经典问题答疑

Fluent经典问题及答疑1 对于刚接触到FLUENT新手来说,面对铺天盖地的学习资料和令人难读的FLUENT help,如何学习才能在最短的时间内入门并掌握基本学习方法呢?(#61)2 CFD计算中涉及到的流体及流动的基本概念和术语:理想流体和粘性流体;牛顿流体和非牛顿流体;可压缩流体和不可压缩流体;层流和湍流;定常流动和非定常流动;亚音速与超音速流动;热传导和扩散等。
(13楼)3 在数值模拟过程中,离散化的目的是什么?如何对计算区域进行离散化?离散化时通常使用哪些网格?如何对控制方程进行离散?离散化常用的方法有哪些?它们有什么不同?(#80)4 常见离散格式的性能的对比(稳定性、精度和经济性)(#62)5 在利用有限体积法建立离散方程时,必须遵守哪几个基本原则?(#81)6 流场数值计算的目的是什么?主要方法有哪些?其基本思路是什么?各自的适用范围是什么?(#130)7 可压缩流动和不可压缩流动,在数值解法上各有何特点?为何不可压缩流动在求解时反而比可压缩流动有更多的困难?(#55)8 什么叫边界条件?有何物理意义?它与初始条件有什么关系?(#56)9 在一个物理问题的多个边界上,如何协调各边界上的不同边界条件?在边界条件的组合问题上,有什么原则?10 在数值计算中,偏微分方程的双曲型方程、椭圆型方程、抛物型方程有什么区别?(#143)11 在网格生成技术中,什么叫贴体坐标系?什么叫网格独立解?(#35)12 在GAMBIT的foreground和background中,真实体和虚实体、实操作和虚操作四个之间是什么关系?13 在GAMBIT中显示的“check”主要通过哪几种来判断其网格的质量?及其在做网格时大致注意到哪些细节?(#38)14 画网格时,网格类型和网格方法如何配合使用?各种方法有什么样的应用范围及做网格时需注意的问题?(#169)15 对于自己的模型,大多数人有这样的想法:我的模型如何来画网格?用什么样的方法最简单?这样做网格到底对不对?(#154)16 在两个面的交界线上如果出现网格间距不同的情况时,即两块网格不连续时,怎么样克服这种情况呢?(#40)17 依据实体在GAMBIT建模之前简化时,必须遵循哪几个原则?(#170)18 在设置GAMBIT边界层类型时需要注意的几个问题:a、没有定义的边界线如何处理?b、计算域内的内部边界如何处理(2D)?(#128)19 为何在划分网格后,还要指定边界类型和区域类型?常用的边界类型和区域类型有哪些?(#127)20 何为流体区域(fluid zone)和固体区域(solid zone)?为什么要使用区域的概念?FLUENT是怎样使用区域的?(#41)21 如何监视FLUENT的计算结果?如何判断计算是否收敛?在FLUENT中收敛准则是如何定义的?分析计算收敛性的各控制参数,并说明如何选择和设置这些参数?解决不收敛问题通常的几个解决方法是什么?(9楼)22 什么叫松弛因子?松弛因子对计算结果有什么样的影响?它对计算的收敛情况又有什么样的影响?(7楼)23 在FLUENT运行过程中,经常会出现“turbulence viscous rate”超过了极限值,此时如何解决?而这里的极限值指的是什么值?修正后它对计算结果有何影响?(#28)24 在FLUENT运行计算时,为什么有时候总是出现“reversed flow”?其具体意义是什么?有没有办法避免?如果一直这样显示,它对最终的计算结果有什么样的影响?(#29)25 燃烧过程中经常遇到一个“头疼”问题是计算后温度场没什么变化?即点火问题,解决计算过程中点火的方法有哪些?什么原因引起点火困难的问题? (#183)26 什么叫问题的初始化?在FLUENT中初始化的方法对计算结果有什么样的影响?初始化中的“patch”怎么理解?(12楼)27 什么叫PDF方法?FLUENT中模拟煤粉燃烧的方法有哪些?(#197)28 在利用prePDF计算时出现不稳定性如何解决?即平衡计算失败。
ATC880英文说明书

ATC880 SeriesProcess Controller1/4 DIN Self-Tuning ControllerDOC974145TABLE OF CONTENTSQUICK START INSTRUCTIONS (5)1.0 INTRODUCTION (8)2.0 SPECIFICATIONS (9)2.1 Mechanical Specifications (9)2.2 Main Power Supply & Environmental Specification (9)2.3 Display Specification (10)2.4 Primary Input Specification (11)2.5 Secondary Input (12)2.6 Pressure & Remote Set Point Inputs Common (13)2.7 Digital Input (14)2.8 Alarms (14)2.9 Optional Serial Communication Interface Specification (15)2.10 Control Output Specification (15)2.11 Retransmission Output Specification (16)2.12 Control and Retransmission Outputs Common Specification (16)2.13 Control Algorithm Specification (16)2.14 Opto-isolated Digital Input Specification (18)3.0 UNPACKING & DIMENSIONAL INFORMATION (19)3.1 Unpacking (19)3.2 Dimensional Information (19)3.3 Block Diagram (19)4.0 MOUNTING AND WIRING (21)4.1 Terminal Assignments and ratings (24)4.2 Terminal Cross Reference With Former Dynisco Model ATC770 (26)5.0 START-UP PROCEDURE (28)5.1 Configuration (28)5.2 Parameters (28)5.2.1 Getting Ready: (28)5.2.2 Keyboard Description: (28)5.2.3 Operating Mode Description: (30)5.3 Setting the Instrument‘s Basic Configuration (30)5.3.1 Setting the Shunt Calibration: (31)5.3.3 Setting the Logic Input Status (optional) (31)5.3.4 Setting the Status of Auto/Manual Selection (optional) (31)5.3.6 Setting the Line Frequency (32)5.3.7 Setting the Display Filter (32)5.4 Setting the Remote Set Point Input/Seconday Input (Optional) (33)5.4.1 Setting the Remote Set Point/Secondary Input Voltage or Current (33)5.4.2 Setting the Remote Set Point (RSP) Input Failsafe Mode (33)5.4.3 Setting the Remote Set Point Limits (33)5.4.4 Setting the Local Remote Set Point Selection (34)6.0 CONFIGURATION (35)6.1 Primary Input Setup (35)6.1.1 Setting the Primary Input Type for a Strain Gage Transducer (35)6.1.2 Setting the Shunt Calibration for Strain Gage Transducers and Amplified Transmitters (35)6.1.3 Setting the Primary Input Type for an Amplified Transmitter (35)6.1.4 Setting the Primary Input Full-Scale Value (36)6.1.5 Setting the Primary Input Low-Scale Value (36)6.1.6 Setting the Primary Input Decimal Place (37)6.1.7 Setting the Primary Input Failsafe Mode (37)6.2 Setting the Alarms: (37)6.2.1 Setting What the Alarm will Monitor (Alarm Input Channel Link): (38)6.2.2 Setting Alarm Type: (38)6.2.3 Setting the Filtering for Alarms: (38)6.2.4 Setting the Hysteresis for Alarms: (39)6.2.5 Setting the Reset Mode for Alarms: (39)6.2.6 Setting the Failsafe Mode for Alarms: (39)6.2.7 Setting the Alarms Threshold Values: (40)6.2.8 Setting the Alarms Mask Reset Type: (40)6.3 Retransmission Output Setup (40)6.3.1 Selection of the Retransmission Output (40)6.3.2 Setting the Retransmission Output Range (40)6.3.3 Setting the Retransmission Output Range High (41)6.3.4 Setting the Retransmission Output Filter (41)6.4 Setting the Control Output: (41)6.4.1 Setting the Control Output Voltage or Current: (41)6.4.2 Making the Control Output Direct/Reverse Selection: (41)6.4.3 Setting the Control Output Limit: (42)6.4.4 Setting the Control Output Manual Mode Indication: (42)6.4.5 Setting the Control Output Display: (42)6.5 Setting the Security Codes: (43)6.5.1 Setting the Security Code for Level A (43)6.5.2 Setting the Security Code for Level B (43)6.5.3 Setting the Security Code for Level C (43)6.6 Configure by Remote PC (Configuration Port Interface or CPI) (44)6.7 Configure Differential Control (45)7.0 OPERATION (51)7.1 Primary Input Calibration (51)7.1.1 Calibration of Pressure Transducers with Internal Shunt Resistor (51)7.1.2 Calibration of Amplified Pressure Transmitters with Internal Shunt Resistor (51)7.1.3 Calibration of Pressure Transducers equipped with External Shunt Resistors (51)7.1.4 Calibration of Analog Inputs Using a Pressure Calibration Source (52)7.1.5 Calibration of the ATC880 to Calibrated Linear Analog Input (52)7.2 Start-Up and Engaging SMART (53)7.2.1 Setting the Process Set Point (53)7.2.2 Engaging SMART (53)7.2.3 Engaging Automatic Control (53)7.3 The Tuning Mode (53)7.3.1 Selecting the Type of Control (54)7.3.2 Engaging the Tuning Algorithm (ATC880 in Manual Mode) (54)7.3.3 Viewing the Tuning Algorithm Parameters (54)7.3.4 Engaging the Adaptive Tuning Algorithm (ATC880 in Automatic Mode) (56)7.3.5 Automatic Stand-By in the event of a Process Upset (56)7.3.6 Automatic or Manual Start-Up (57)7.3.7 Manual/Automatic Transfer (57)7.3.8 Tuned Parameters, After SMART ―tuning‖ (58)8.0 INSTRUMENT CALIBRATION (60)8.1 General Calibration Procedure (60)8.2 RS-485 (Optional) (62)8.2.1 Serial Communication Interface Address (62)8.2.2 Protocol Type (62)8.2.3 Communication Type (62)8.2.4 Communication Baud Rate (62)8.2.5 Setting the Status of Auto/Manual Selection (optional) (63)9.0 ERROR CODES (64)9.1 Error Codes and Troubleshooting (64)9.2 ―OPEN‖ Error Code and Troubleshooting (66)9.3 Instrument Maintenance (66)10.0 NORMATIVE REFERENCES (67)11.0 PARAMETER GROUP MENUS (69)11.1 Group 1 Parameters (71)11.2 Group 2 Parameters (73)11.3 Group 3 Parameters (78)11.4 Group 4 Parameters (82)11.5 Group 5 Parameters (87)11.6 Group 6 Parameters (89)11.7 Group 9 Parameters (90)12.0 PID CONTROLLER DEFINITIONS (92)13.0 WARRANTY AND SERVICE (94)QUICK START INSTRUCTIONSMountingPrepare panel cutout to dimensions shown below (1A).If more instruments are mounted in the same panel near together, maintainthe distances between one instrumento to another like as in the figure.Slide the rubber gasket (1) over the case.Slide the instrument case into the cutout (2,1A).Attach the panel mounting hardware tightening the threaded rod (3) for asecure fit and with a screwdriver, turn the screws with a torque between 0.3and 0.4 Nm.WiringRefer to Section 4 for wiring/connections and terminal diagramConnect the wires from transducer cable as shown in the terminal diagram,turn the screws with a torque between 1.0 and 1.2 Nm..Connect final control device.Connect alarm(s) if applicable. Note that alarm defaults are High, ReverseActing for alarms 2 & 3 –alarm 1 is low inhibited.Connect power to the appropriate terminals as shown.1AScalingApply power to the instrument; Upper display will give a reading near zero.Lower display will read the manual output %.Press key until the Upper display reads NONE and lower display readsGROUP.If your transducer is not a 10,000-psi model, select GROUP3 using the Uparrow, enter with function key.Lower display reads PI.FSV (Full Scale Value), and the upper display reads10,000. Note: If your transducer is a 10,000-psi model skip next two steps.Scroll to GROUP and select 2.Using the Down arrow key set the appropriate Full Scale Value for yourtransducer.Enter using the key to scroll until GROUP legend appears again.Using Up arrow key, select GROUP2. Enter with key.Follow instructions for Calibration and Operation in Step 4 of Quick Start Calibration and OperationLower display reads ZERO.C and upper display reads OFF. Be suretransducer is at operation temperature and that no pressure is applied.Change upper display to ON by using the Up arrow key. Enter with the key. After a few seconds, the lower display will show SPAN.C and upper display will show OFF.Change upper display to ON using Up arrow key. Enter with thekey. In a few seconds lower display shows SMART and upper display showsOFF. Calibration is complete.Using the key, scroll to the GROUP display. Enter 1 with the Uparrow, and enter with the key. Instrument shows 0 on upper displayand SP on lower display.Set Process Set point. Press twice.Set Alarm 1, 2, 3 thresholds (if applicable) by pressing . Changethreshold with the up and down keys.Press twice. Lower display will read GROUP, and upper display willread none.Press key. Upper display will read 0 +/- 10 process pressure, lowerdisplay will read 0. This is control output %.Be sure process is at operating temperature.Utilizing up and down keys, manipulate the output % until the upperdisplay is reading at approximately the set point.Press key until lower display reads GROUP. Select group 2.Press key three times. Lower display reads SMART and upper displayreads OFF.Using up arrow key, turn SMART function to on. Enter with key.SMART LED will flash and a countdown will begin as the controller arrives atinitial P&I (D) parameters.Return to GROUP none and observe that the value in the upper display is theactual set point you wish to control.When the SMART LED has stopped flashing, press and hold the A/M key forat least 5 seconds. The manual LED will extinguish, and you will be inautomatic control mode.Again, return to GROUP2 and select SMART. Turn the function on with theup arrow, and enter with the . This will activate the Adaptive Tune algorithm, and will maintain the correct P&I (D) parameters for the process. Itwill remain on until manually turned off. It will also come on anytime theATC880 is the automatic control mode.Return to GROUP,None, and observe the process. The set point may beadjusted in GROUP1 while the controller is in automatic mode.Operator may alternately display Output %, Set Point, Deviation, Peak Value,or RPM by pressing the up arrow key.The preceding Quick Start instructions are the basic settings required to install, wire, and get the controller operating. Please refer to the complete installation and operation manual for additional functions. Questions on your transducer will be addressed in the manual included with your transducer.References to Profibus features and instructions should be ignored. Profibus is being considered for a future line expansion and has been accommodated in the current design.1.0 INTRODUCTIONThe ATC880 Pressure/Process Controller is a microprocessor-based instrument with the capability of controlling an extruder or other process using an advanced proprietary SMART self-tuning algor ithm. The input is user configurable to be 350Ω Strain Gage, high-level voltage or high level current. The voltage or current inputs are compatible with many process transmitter combinations. Three fully programmable alarms and an analog retransmission output are also included as part of the standard ATC880 package.Five groups of configuration parameters are available from the keyboard, and are protected by three levels of user definable software locks. (A sixth group of read-only parameters can also be viewed) In the programming mode the lower display will show the parameter being displayed, and the upper display will show its value. In the operating mode, the upper display will show the process variable, and the lower display offers the choice of displaying set point, deviation from set point, output %, RPM or peak. In addition, a red LED bar graph presents an analog representation of the main input (process variable), as well as indication of the alarm set points. The alarms are shown relative to the span of process and are indicated as missing or present bars relative to the process input.References to Profibus features and instructions should be ignored. Profibus is being considered for a future line expansion and has been accommodated in the current design.WARNING NOTE: The user should be aware that if this equipment is used in a manner not consistent with the specifications and instructions in this manual, the protection provided by the equipment might be impaired.Product Codes (ordering options)Note: UL pending only for Power Code Voltage equal to 5 (24Vac/dc, switching)2.0 SPECIFICATIONS2.1 Mechanical SpecificationsCase: Polycarbonate Black color Self-extinguishing degree V0 according to UL 94Front Panel: Designed and verified for IP65 and NEMA 4X for indoor location Installation: Panel mountingRear Terminal Block: 46 screw terminals with rear safety cover2.2 Main Power Supply & Environmental SpecificationMain Power Supply: From 100 to 240Vac (-15% to 10%), 50/60Hz switching. Option: 24Vac/dcPower supply variation: From -15% to 10% (for 100 to 240Vac). From 14 to 32 Vac/dc (for optional 24Vac/dc).Power Consumption: Max 22VA at 50Hz or Max 27VA at 60Hz for Main Power Supply from 100 to 240 VacInsulation Resistance: 100MΩ @500VdcDielectric Strength: 1500V rms for 1 min, 1800V for 1 sec.Ambient Temperature: From 0 to 50°C. Ensure the enclosure provides adequate ventilationStorage Temperature: From -20 to 70°CHumidity: Max 85% RH non-condensingAltitude: This product is not suitable for use above 2000m (6562ft) or in explosive or corrosive atmospheresWatchdog: Hw/Sw is provided for automatic restartAgency Approvals: UL File # 193253Self-Certification: CEElectromagnetic Compatibility:The instrument is compliant with the European Directive 2004/108/CE according to Product Standard EN 61326-1.Emission limit:class A – group 1 ISM for equipment suitable for use in allestablishments other then domestic and those directly connected to a lowvoltage power supply network which supplies buildings used for domesticpurposes.Immunity:Electrostatic discharge (according to EN 61000-4-2):contact discharge = 4kV; air discharge = 8kVRadio-frequency electrical magnetic (according to EN 61000-4-3):EM field (amplit. mod.) = 10 V/m (80MHz to 1 GHz);3V/m (1,4 GHz to 2 GHz);1 V/m (2 GHz to 2,7 GHz)Electrical fast transient/burst (according to EN 61000-4-4):AC Power = 2kV;I/O Signal/Control = 2kV (5/50 ns, 5 kHz);I/O Signal/Control connected directly to mains supply = 2kV (5/50 ns, 5kHz)Surge (according to EN 61000-4-5):AC power = 1kV (Line to Line) / 2kV (Line to GND);I/O Signal/Control = 1kV (Line to Line) / 2kV (Line to GND)Radio frequency common mode (according to EN 61000-4-6):AC Power = 3 V (150kHz to 80 MHz);I/O Signal/Control = 3 V (150kHz to 80 MHz)Voltage dips/short interruptions (according to EN 61000-4-11):0% during 1 cycle; 40% during 12 cycles; 70% during 30 cyclesThis equipment is intendent for use in an industrial location. There may be potential difficulties ensuring electromagnetic compatibility in other environmental due to conducted as well as radiated disturbances.Safety Requirements:The instrument is compliant with the European Directive 2006/95/CE according to Reference Standard EN 61010-1 for installation category I and pollution degree 2 Installation category CAT I: Voltage transients on any power connected tothe instrument must not exceed 1.5kV. Pollution degree 2: Conductive pollution must be excluded from thecabinet in which the instrument is mounted.2.3 Display SpecificationDisplay: LED technology, custom type.Upper Digits: Red color, 5 numeric digits, 7 segments with decimal point 13.2mm high. Lower Digits: Green color, 5 alphanumeric digits (British flag), 14 segments with decimal points, 11.3 mm high.Bar Graph: Red color, 35 segment with 3% resolution. Displays continuous bar graph to indicate the measured variable of the main input (0-100% full scale). Alarm set point values displayed. Last segment blinks for pressure greater than full scale value. Indicators (Beacons):Red LED‘s annunciations:A1: Lit when alarm 1 is in alarm stateA2: Lit when alarm 2 is in alarm stateA3: Lit when alarm 3 is in alarm stateREM: Lit when device is controlled by serial link0-25-50-75-100-%: These six LEDs are always on to improve the bar graphindication.SMRT: Flashing when the first step of SMART algorithm is activated. Lit whenthe second step of SMART algorithm is activatedMAN: Lit when device is in manual modeRSP: Lit when Remote Set Point is selectedKg/cm2, PSI, Bar, MPa: Engineering unit for the pressure input. These fourbeacons are located within the display window, between the numeric digits andthe alarm beacons.Green LED‘s ann unciations:SP: Lit when lower display shows the Set PointPEAK: Lit when lower display shows the peak valueDEV: Lit when lower display shows the deviation (Measured Variable minus SetPoint)OUT%: Lit when lower display shows the Output Value (absolute value with 0.1% resolution)RPM: Lit when lower display shows the Output Value scaled to RPM2.4 Primary Input SpecificationMain Input: Selectable between strain gage and linear by software configuration.Strain Gage Input: From 340 to 5000Ω, 1-4 mV/V. Excitation 10V +/- 7%. 5 wires connection.Linear Input: Selectable between 0-5Vdc, 0-10Vdc, 0-20mA, 4-20mA.Input Signal: -25/125% of full scale (approximately –10 / 50mV).Shunt Calibration: With or without shunt resistor (value programmable from 40.0 to100.0%).Zero Balance: ±25% of full scale (approximately ± 10 mV).Auxiliary Power Supply: 24Vdc / 1.5W power supply for two or four wire transmitter. Input Impedance: <10Ω for linear current input;>165KΩ for linear voltage inputInput Protection: Open circuit detection for strain gage (on signal and excitation wires) and 4-20mA inputs; it is not available for 0-5Vdc, 0-10Vdc and 0-20mA. Up or down scale keyboard programmable.Sampling time: 50mS typical.Display Update Time: Selectable: 50, 100, 250 or 400mS.Engineering Units: Dedicated beacons within the display window.Calibration Mode: Field calibrations (zero and span) are applicable for both strain gage and linear input. Moreover it is possible to delete the field calibration done by the end user and to restore original factory calibration values.Input resolution: 4000 counts.Full scale value Resolution10/4000 1 count4002/8000 2 counts8005/20000 5 counts20010/40000 10 counts40020/80000 20 counts80050/99950 50 countsDecimal Point: Settable in any position of the display or none at all.2.5 Secondary InputSecondary input: Selectable among 0-5Vdc, 0-10Vdc, 0-20mA, 4-20mA or strain gage (optional).Function: Second sensor for the measurement of a differential pressure (in case of strain gage or linear input); remote set point (only linear inpu).Input Protection: Open circuit detection for strain gage (on signal and excitation wires) and 4-20mA inputs; not available for 0-10Vdc, 0-5Vdc and 0-20mA inputs. Up or down scale keyboard.Input Impedance:< 10Ω for linear current input> 165KΩSampling Time: Remote set point input is selectable among 100, 200, 500 or 1000mSe; differential pressure is 50 mS, typical.Display update: At each sample.Input Resolution with Linear Input: 4000 counts.Low/High Scale Values: Secondary input of a differential pressure: freely settable, but with the same resolution and decimal point position of the primary pressure input. Remote set point: settable from 0 to pressure input full scale value with the same resolution and decimal point position of pressure input.NOTE: This input is not isolated from main input. A double or reinforced insulation between instrument output and power supply must be guaranteed by the external device.2.6 Pressure & Remote Set Point Inputs CommonCommon Mode Rejection Ratio: >120dB @50/60HzNormal Mode Rejection Ratio: >60dB @ 50/60HzStrain gage input: From 340 to 5000Ω, 1-4 mV/V. Excitation 10V +/- 7%. 5 wires connection.Input signal: -25/125% of full scale (approximately -10/50mV).Shunt calibration: With or without shunt resistor (value programmable from 40.0 to 100.0%), the same setting will be used for both inputs (main and secondary) when the differential pressure measurement is selected.Zero balance: +/- 25% of full scale (approximately +/- 10mV).Reference accuracy: +/- 0.1% FSV +/-1 digit @ 25 +/- 1°C and nominal power supply voltage.Operative accuracy: temperature drift: < 300 ppm/K of full span for current, voltage and strain gage input.Zero and span calibration: If differential input used, there is no relation between the calibration of the two single sensors; each input is provided with its own zero and span calibration parameters.2.7 Digital InputDigital input: One input from contact closure (voltage free). It is marked as ―Reset‖ on rear panel, contacts 23 and 24. It may be keyboard programmable for the following functions:• alarm reset• peak reset• alarm and peak reset• zero calibration of the primary input• zero calibration of the primary input, alarm and peak resetNOTE: This input is not isolated from main input. A double or reinforced insulation between instrument output and power supply must be guaranteed by the external device.Opto-isolated Digital Input: Four optional digital inputs are provided for control purposes. The interface circuit is opto-isolated with respect to the CPU and analog inputs.DIG1: This contact acts as an automatic / manual switch, if it is enabled by the proper parameter (closed means manual mode, open means automatic mode).DIG2: Control output value increaseDIG3: Control output value decreaseThese two contacts are used to increase / decrease the output value with a linear, not exponential, rate of change (about 20 seconds for a full scale variation from 0 to 100%). DIG4: This contact is used to switch the controller from automatic to manual mode setting to zero the control output. When this logic input is closed the transfer from manual to automatic mode by the front panel is inhibited while the user may modify the control output. To return to automatic mode the logic input should be de-activated.2.8 AlarmsAlarm Outputs: 3 standard alarms (AL1, AL2 and AL3).AL1 and AL2 Contacts: 1 SPDT 2A max @ 240Vac resistive load.AL3 Contacts: 1 SPST 2A max @ 240Vac resistive load.Contact Protection: Varistor for spike protection.Alarm Type: Each alarm is keyboard programmable for:• Process / Deviation / Band• High / Low / Low inhibited on start up• Auto / Manual resetAlarm Mask: The alarm mask may be restored using the keyboard parameter (AL.MSK). Moreover the alarm mask of deviation and band alarms is restored at set point change and during set point ramp.Excitation Type: Keyboard configurable for each alarm: relay coil energized in no alarm condition (failsafe) or relay coil energized in alarm condition (non-failsafe). The default condition is failsafe.Threshold: From 0 to 110% Full Scale (the threshold may be limited due to the selected full scale value).Hysteresis: Keyboard programmable for each alarm; from 0.1% to 10.0% of span or 1 Least Significant Digit (whichever is greater) for each alarm.Alarm Filter: Selectable from the following values: OFF, 0.4S, 1S, 2S, 3S, 4S, 5S.Alarm Update Time: At every input conversion.2.9 Optional Serial Communication Interface SpecificationSerial Interface: RS-485 type. Opto-isolated.Protocol Type: Modbus/Jbus (RTU mode).Type of Parameters: Run-time and configuration are available by serial link.Device Address: From 1 to 255NOTE: The physical interface can only support up to 31 devices for each segment.Use multiple segments for more than 31 devices.Baud Rate: 600 up to 19200 baud.Format: 1 start bit, 8 bits with or without parity, 1 stop bitParity: Even/Odd.2.10 Control Output SpecificationControl Output: Opto-isolated from CPU input and output circuits.Type of Analog Output: Keyboard selectable between:•+ 0/10Vdc min load 5KΩ•– 10/+10 VDC min load 5KΩ•+ 0/5Vdc min load 5KΩ•+ 0/20mA max load 500KΩ•– 4/20mA max load 500ΩResolution: 0.1% in manual mode, 0.03% in automatic mode.Scaling: The output control value may be displayed in two modes:• from 0.0 to 100.0% (0.1% resolution)• from a low to a high limit selection from -10000 to 100002.11 Retransmission Output SpecificationRetransmission Output: Opto-isolated from CPU input and output circuits.Type of Analog Output: Keyboard selectable between:•+ 0/10Vdc min load 5KΩ, with under/overrange capability from -2.5 to 12.5V.•± 10Vdc min load 5KΩ, with under/overrange capability from -12.25 to 12.5V.•+ 0/5Vdc min load 5KΩ, with under/overrange capability from -1.25 to 6.25V.•+ 0/20mA max load 500Ω, with un der/overrange capability from 0 to 24mA (max. load 400Ω over 20 mA).• + 4/20mA max load 500Ω, with under/overrange capability from 0 to 24mA (max. load 400Ω over 20mA).Resolution: 0.1% of output modeScaling: The retransmission low and high limits are selectable from 0 to full scale input value. The two scaling values may be freely selectable within the above range. This allows for a direct or reverse output type.Output Filter: Selectable from the following values: OFF, 0.4S, 1S, 2S, 3S, 4S, 5S2.12 Control and Retransmission Outputs Common SpecificationReference Accuracy: ±0.1% of output span @ 25 ± 10°C and nominal line voltage. Linearity Error: <0.1% of output span.Output Noise: <0.1% of output span.2.13 Control Algorithm SpecificationControl Type: PID plus Integral Preload plus Anti-Reset WindupOutput Value Indication: Selectable between the following Modes:• Range 0/100.0%• Selectable with two calibrated values for RPM indication• In automatic mode either mode is available• In manual mode, a parameter is provided to select the first or second method of indication.SMART Algorithm: The SMART procedure is activated by setting the SMART Parameter to ON. In manual mode the controller will start the TUNE algorithm (SMRT led flashes), while in automatic mode it will enable the ADAPTIVE function (SMRT led lights steady).The SMART can select two types of procedures:1. The TUNE algorithm2. The Adaptive algorithmTUNE ALGORITHMTo implement the TUNE algorithm, set the instrument in manual mode and the select SMART ON. SMART will switch to OFF after the PID parameters (PB, TI, TD) are calculated (during this procedure the LED will be flashing). The basic concepts of the auto-tuning system are based on the open loop step response, for this reason the TUNE function may be activated only in the manual mode.The equivalent mathematical model of the process is characterized by three parameters: the gain, the time constant and the equivalent time delay. The power output of the controller is changed by a small step value. Then, the controller stores the process variable response. From the transient response, the controller estimates the three basic process parameters by means of the area‘s method. It applies these parameters, and re-runs the step process. When this is done, it calculates the final PID parameters.The step response is a convenient way to characterize this type of process dynamics because its model is based on the alteration of the behavior of the process and very accurately determining the response. It is capable of estimating the process parameters with high precision.ADAPTIVE ALGORITHMIn order to implement the adaptive algorithm, the instrument should be in automatic mode. Then change SMART to ON. In this case the ON will be remembered by the instrument even if the instrument was switched off.In order to deactivate the adaptive processes, return the SMART parameter to OFF. The ADAPTIVE is an on-line algorithm that ―observes‖ the measured value and l ooks for oscillation due to a variation of the load or the set point. When a significant pattern is―recognized,‖ the decision procedure starts to recalculate the PID parameters of the controller. While the ADAPTIVE procedure is enabled the PID parameters can only be monitored.AUTOMATIC STAND-BY: This function avoids overshoot due to temporary process。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
XPSPEAK 说明书
Using XPSPEAK Version 4.1 November 2000Contents Page Number XPS Peak Fitting Program for WIN95/98 XPSPEAK Version 4.1 (1)Program Installation (1)Introduction (1)First Version (1)Version 2.0 (1)Version 3.0 (1)Version 3.1 (2)Version 4.0 (2)Version 4.1 (2)Future Versions (2)General Information (from R. Kwok) (3)Using XPS Peak (3)Overview of Processing (3)Appearance (4)Opening Files (4)Opening a Kratos (*.des) text file (4)Opening Multiple Kratos (*.des) text files (5)Saving Files (6)Region Parameters (6)Loading Region Parameters (6)Saving Parameters (6)Available Backgrounds (6)Averaging (7)Shirley + Linear Background (7)Tougaard (8)Adding/Adjusting the Background (8)Adding/Adjusting Peaks (9)Peak Types: p, d and f (10)Peak Constraints (11)Peak Parameters (11)Peak Function (12)Region Shift (13)Optimisation (14)Print/Export (15)Export (15)Program Options (15)Compatibility (16)File I/O (16)Limitations (17)Cautions for Peak Fitting (17)Sample Files: (17)gaas.xps (17)Cu2p_bg.xps (18)Kratos.des (18)ASCII.prn (18)Other Files (18)XPS Peak Fitting Program for WIN95/98 XPSPEAKVersion 4.1Program InstallationXPS Peak is freeware. Please ask RCSMS lab staff for a copy of the zipped 3.3MB file, if you would like your own copyUnzip the XPSPEA4.ZIP file and run Setup.exe in Win 95 or Win 98.Note: I haven’t successfully installed XPSPEAK on Win 95 machines unless they have been running Windows 95c – CMH.IntroductionRaymond Kwok, the author of XPSPEAK had spent >1000 hours on XPS peak fitting when he was a graduate student. During that time, he dreamed of many features in the XPS peak fitting software that could help obtain more information from the XPS peaks and reduce processing time.Most of the information in this users guide has come directly from the readme.doc file, automatically installed with XPSPEAK4.1First VersionIn 1994, Dr Kwok wrote a program that converted the Kratos XPS spectral files to ASCII data. Once this program was finished, he found that the program could be easily converted to a peak fitting program. Then he added the dreamed features into the program, e.g.∙ A better way to locate a point at a noise baseline for the Shirley background calculations∙Combine the two peaks of 2p3/2 and 2p1/2∙Fit different XPS regions at the same timeVersion 2.0After the first version and Version 2.0, many people emailed Dr Kwok and gave additional suggestions. He also found other features that could be put into the program.Version 3.0The major change in Version 3.0 is the addition of Newton’s Method for optimisation∙Newton’s method can greatly reduce the optimisation time for multiple region peak fitting.Version 3.11. Removed all the run-time errors that were reported2. A Shirley + Linear background was added3. The Export to Clipboard function was added as requested by a user∙Some other minor graphical features were addedVersion 4.0Added:1. The asymmetrical peak function. See note below2. Three additional file formats for importing data∙ A few minor adjustmentsThe addition of the Asymmetrical Peak Function required the peak function to be changed from the Gaussian-Lorentzian product function to the Gaussian-Lorentzian sum function. Calculation of the asymmetrical function using the Gaussian-Lorentzian product function was too difficult to implement. The software of some instruments uses the sum function, while others use the product function, so both functions are available in XPSPEAK.See Peak Function, (Page 12) for details of how to set this up.Note:If the selection is the sum function, when the user opens a *.xps file that was optimised using the Gaussian-Lorentzian product function, you have to re-optimise the spectra using the Gaussian-Lorentzian sum function with a different %Gaussian-Lorentzian value.Version 4.1Version 4.1 has only two changes.1. In version 4.0, the printed characters were inverted, a problem that wasdue to Visual Basic. After about half year, a patch was received from Microsoft, and the problem was solved by simply recompiling the program2. The import of multiple region VAMAS file format was addedFuture VersionsThe author believes the program has some weakness in the background subtraction routines. Extensive literature examination will be required in order to revise them. Dr Kwok intends to do that for the next version.General Information (from R. Kwok)This version of the program was written in Visual Basic 6.0 and uses 32 bit processes. This is freeware. You may ask for the source program if you really want to. I hope this program will be useful for people without modern XPS software. I also hope that the new features in this program can be adopted by the XPS manufacturers in the later versions of their software.If you have any questions/suggestions, please send an email to me.Raymund W.M. KwokDepartment of ChemistryThe Chinese University of Hong KongShatin, Hong KongTel: (852)-2609-6261Fax:(852)-2603-5057email: rmkwok@.hkI would like to thank the comments and suggestions from many people. For the completion of Version 4.0, I would like to think Dr. Bernard J. Flinn for the routine of reading Leybold ascii format, Prof. Igor Bello and Kelvin Dickinson for providing me the VAMAS files VG systems, and my graduate students for testing the program. I hope I will add other features into the program in the near future.R Kwok.Using XPS PeakOverview of Processing1. Open Required Files∙See Opening Files (Page 4)2. Make sure background is there/suitable∙See Adding/Adjusting the Background, (Page 8)3. Add/adjust peaks as necessary∙See Adding/Adjusting Peaks, (Page 9), and Peak Parameters, (Page 11)4. Save file∙See Saving Files, (Page 6)5. Export if necessary∙See Print/Export, (Page 15)AppearanceXPSPEAK opens with two windows, one above the other, which look like this:∙The top window opens and displays the active scan, adds or adjusts a background, adds peaks, and loads and saves parameters.∙The lower window allows peak processing and re-opening and saving dataOpening FilesOpening a Kratos (*.des) text file1. Make sure your data files have been converted to text files. See the backof the Vision Software manual for details of how to do this. Remember, from the original experiment files, each region of each file will now be a separate file.2. From the Data menu of the upper window, choose Import (Kratos)∙Choose directory∙Double click on the file of interest∙The spectra open with all previous processing INCLUDEDOpening Multiple Kratos (*.des) text files∙You can open up a maximum of 10 files together.1. Open the first file as above∙Opens in the first region (1)2. In the XPS Peak Processing (lower) window, left click on 2(secondregion), which makes this region active3. Open the second file as in Step2, Opening a Kratos (*.des) text file,(Page 4)∙Opens in the second region (2)∙You can only have one description for all the files that are open. Edit with a click in the Description box4. Open further files by clicking on the next available region number thenfollowing the above step.∙You can only have one description for all the files that are open. Edit with a click in the Description boxDescriptionBox 2∙To open a file that has already been processed and saved using XPSPEAK, click on the Open XPS button in the lower window. Choose directory and file as normal∙The program can store all the peak information into a *.XPS file for later use. See below.Saving Files1. To save a file click on the Save XPS button in the lower window2. Choose Directory3. Type in a suitable file name4. Click OK∙Everything that is open will be saved in this file∙The program can also store/read the peak parameter files (*.RPA)so that you do not need to re-type all the parameters again for a similar spectrum.Region ParametersRegion Parameters are the boundaries or limits you have used to set up the background and peaks for your files. These values can be saved as a file of the type *.rpa.Note that these Region Parameters are completely different from the mathematical parameters described in Peak Parameters, (Page 11) Loading Region Parameters1. From the Parameters menu in the upper window, click on Load RegionParameters2. Choose directory and file name3. Click on Open buttonSaving Parameters1. From the Parameters menu in the XPS Peak Fit (Upper) window, clickon Save Region Parameters2. Choose directory and file name3. Click on the Save buttonAvailable BackgroundsThis program provides the background choices of∙Shirley∙Linear∙TougaardAveraging∙ Averaging at the end points of the background can reduce the time tofind a point at the middle of a noisy baseline∙ The program includes the choices of None (1 point), 3, 5, 7, and 9point average∙ This will average the intensities around the binding energy youselect.Shirley + Linear Background1. The Shirley + Linear background has been added for slopingbackgrounds∙ The "Shirley + Linear" background is the Shirley background plus astraight line with starting point at the low BE end-point and with a slope value∙ If the slope value is zero , the original Shirley calculation is used∙ If the slope value is positive , the straight line has higher values atthe high BE side, which can be used for spectra with higher background intensities at the high BE side∙ Similarly, a negative slope value can be used for a spectrum withlower background intensities at the high BE side2. The Optimization button may be used when the Shirley background is higher at some point than the signal intensities∙ The program will increase the slope value until the Shirleybackground is below the signal intensities∙ Please see the example below - Cu2p_bg.xps - which showsbackground subtraction using the Shirley method (This spectrum was sent to Dr Kwok by Dr. Roland Schlesinger).∙ A shows the problematic background when the Shirley backgroundis higher than the signal intensities. In the Shirley calculation routine, some negative values were generated and resulted in a non-monotonic increase background∙ B shows a "Shirley + Linear" background. The slope value was inputby trial-and-error until the background was lower than the signal intensities∙ C was obtained using the optimisation routineA slope = 0B slope = 11C slope = 15.17Note: The background subtraction calculation cannot completely remove the background signals. For quantitative studies, the best procedure is "consistency". See Future Versions, (Page 2).TougaardFor a Tougaard background, the program can optimise the B1 parameter by minimising the "square of the difference" of the intensities of ten data points in the high binding energy side of the range with the intensities of the calculated background.Adding/Adjusting the BackgroundNote: The Background MUST be correct before Peaks can be added. As with all backgrounds, the range needs to include as much of your peak as possible and as little of anything else as possible.1. Make sure the file of interest is open and the appropriate region is active2. Click on Background in the upper window∙The Region 0 box comes up, which contains the information about the background3. Adjust the following as necessary. See Note.∙High BE (This value needs to be within the range of your data) ∙Low BE (This value needs to be within the range of your data) NOTE: High and Low BE are not automatically within the range of your data. CHECK CAREFULLY THAT BOTH ENDS OF THE BACKGROUND ARE INSIDE THE EDGE OF YOUR DATA. Nothing will happen otherwise.∙No. of Ave. Pts at end-points. See Averaging, (Page 7)∙Background Type∙Note for Shirley + Linear:To perform the Shirley + Linear Optimisation routine:a) Have the file of interest openb) From the upper window, click on Backgroundc) In the resulting box, change or optimise the Shirley + LinearSlope as desired∙Using Optimize in the Shirley + Linear window can cause problems. Adjust manually if necessary3. Click on Accept when satisfiedAdding/Adjusting PeaksNote: The Background MUST be correct before peaks can be added. Nothing will happen otherwise. See previous section.∙To add a peak, from the Region Window, click on Add Peak ∙The peak window appears∙This may be adjusted as below using the Peak Window which will have opened automaticallyIn the XPS Peak Processing (lower) window, there will be a list of Regions, which are all the open files, and beside each of these will be numbers representing the synthetic peaks included in that region.Regions(files)SyntheticPeaks1. Click on a region number to activate that region∙The active region will be displayed in the upper window2. Click on a peak number to start adjusting the parameters for that peak.∙The Processing window for that peak will open3. Click off Fix to adjust the following using the maximum/minimum arrowkeys provided:∙Peak Type. (i.e. orbital – s, p, d, f)∙S.O.S (Δ eV between the two halves of the peak)∙Position∙FWHM∙Area∙%Lorenzian-Gaussian∙See the notes for explanations of how Asymmetry works.4. Click on Accept when satisfiedPeak Types: p, d and f.1. Each of these peaks combines the two splitting peaks2. The FWHM is the same for both the splitting peaks, e.g. a p-type peakwith FWHM=0.7eV is the combination of a p3/2 with FWHM at 0.7eV anda p1/2 with FWHM at 0.7eV, and with an area ratio of 2 to 13. If the theoretical area ratio is not true for the split peaks, the old way ofsetting two s-type peaks and adding the constraints should be used.∙The S.O.S. stands for spin orbital splitting.Note: The FWHM of the p, d or f peaks are the FWHM of the p3/2,d5/2 or f7/2, respectively. The FWHM of the combined peaks (e.g. combination of p3/2and p1/2) is shown in the actual FWHM in the Peak Parameter Window.Peak Constraints1. Each parameter can be referenced to the same type of parameter inother peaks. For example, for four peaks (Peak #0, 1, 2 and 3) with known relative peak positions (0.5eV between adjacent peaks), the following can be used∙Position: Peak 1 = Peak 0 + 0.5eV∙Position: Peak 2 = Peak 1 + 0.5eV∙Position: Peak 3 = Peak 2 + 0.5eV2. You may reference to any peak except with looped references.3. The optimisation of the %GL value is allowed in this program.∙ A suggestion to use this feature is to find a nice peak for a certain setting of your instrument and optimise the %GL for this peak.∙Fix the %GL in the later peak fitting process when the same instrument settings were used.4. This version also includes the setting of the upper and lower bounds foreach parameter.Peak ParametersThis program uses the following asymmetric Gaussian-Lorentzian sumThe program also uses the following symmetrical Gaussian-Lorentzian product functionPeak FunctionNote:If the selection is the sum function, when the user opens a *.xps file that was optimised using the Gaussian-Lorentzian product function, you have to re-optimise the spectra using the Gaussian-Lorentzian sum function with a different %Gaussian-Lorentzian value.∙You can choose the function type you want1. From the lower window, click on the Options button∙The peak parameters box comes up∙Select GL sum for the Gaussian-Lorentzian sum function∙Select GL product for the Gaussian-Lorentzian product function. 2. For the Gaussian-Lorentzian sum function, each peak can have sixparameters∙Peak Position∙Area∙FWHM∙%Gaussian-Lorentzian∙TS∙TLIf anyone knows what TS or TL might be, please let me know. Thanks, CMH3. Each peak in the Gaussian-Lorentzian product function can have fourparameters∙Peak Position∙Area∙FWHM∙%Gaussian-LorentzianSince peak area relates to the atomic concentration directly, we use it as a peak parameter and the peak height will not be shown to the user.Note:For asymmetric peaks, the FWHM only refers to the half of the peak that is symmetrical. The actual FWHM of the peak is calculated numerically and is shown after the actual FWHM in the Peak Parameter Window. If the asymmetric peak is a doublet (p, d or f type peak), the actual FWHM is the FWHM of the doublet.Region ShiftA Region Shift parameter was added under the Parameters menu∙Use this parameter to compensate for the charging effect, the fermi level shift or any change in the system work function∙This value will be added to all the peak positions in the region for fitting purposes.An example:∙ A polymer surface is positively charged and all the peaks are shifted to the high binding energy by +0.5eV, e.g. aliphatic carbon at 285.0eV shifts to 285.5eV∙When the Region Shift parameter is set to +0.5eV, 0.5eV will be added to all the peak positions in the region during peak fitting, but the listed peak positions are not changed, e.g. 285.0eV for aliphatic carbon. Note: I have tried this without any actual shift taking place. If someone finds out how to perform this operation, please let me know. Thanks, CMH.In the meantime, I suggest you do the shift before converting your files from the Vision Software format.OptimisationYou can optimise:1. A single peak parameter∙Use the Optimize button beside the parameter in the Peak Fitting window2. The peak (the peak position, area, FWHM, and the %GL if the "fix" box isnot ticked)∙Use the Optimize Peak button at the base of the Peak Fitting window3. A single region (all the parameters of all the peaks in that region if the"fix" box is not ticked)∙Use the Optimize Region menu (button) in the upper window4. All the regions∙Use the Optimize All button in the lower window∙During any type of optimisation, you can press the "Stop Fitting" button and the program will stop the process in the next cycle.Print/ExportIn the XPS Peak Fit or Region window, From the Data menu, choose Export or Print options as desiredExport∙The program can export the ASCII file of spectrum (*.DAT) for making high quality figures using other software (e.g. SigmaPlot)∙It can export the parameters (*.PAR) for further calculations (e.g. use Excel for atomic ratio calculations)∙It can also copy the spectral image to the system clipboard so that the spectral image can be pasted into a document (e.g. MS WORD). Program Options1. The %tolerance allows the optimisation routine to stop if the change inthe difference after one loop is less that the %tolerance2. The default setting of the optimisation is Newton's method∙This method requires a delta value for the optimisation calculations ∙You may need to change the value in some cases, but the existing setting is enough for most data.3. For the binary search method, it searches the best fit for each parameterin up to four levels of value ranges∙For example, for a peak position, in first level, it calculates the chi^2 when the peak position is changed by +2eV, +1.5eV, +1eV, +0.5eV,-0.5eV, -1eV, -1.5eV, and -2eV (range 2eV, step 0.5eV) ∙Then, it selects the position value that gives the lowest chi^2∙In the second level, it searches the best values in the range +0.4eV, +0.3eV, +0.2eV, +0.1eV, -0.1eV, -0.2eV, -0.3eV, and -0.4eV (range0.4eV, step 0.1eV)∙In the third level, it selects the best value in +0.09eV, +0.08eV, ...+0.01eV, -0.01eV, ...-0.09eV∙This will give the best value with two digits after decimal∙Level 4 is not used in the default setting∙The range setting and the number of levels in the option window can be changed if needed.4. The Newton's Method or Binary Search Method can be selected byclicking the "use" selection box of that method.5. The selection of the peak function is also in the Options window.6. The user can save/read the option parameters with the file extension*.opa∙The program reads the default.opa file at start up. Therefore, the user can customize the program options by saving the selectionsinto the default.opa file.CompatibilityThe program can read:∙Kratos text (*.des) files together with the peak fitting parameters in the file∙The ASCII files exported from Phi's Multiplex software∙The ASCII files of Leybold's software∙The VAMAS file format∙For the Phi, Leybold and VAMAS formats, multiple regions can be read∙For the Phi format, if the description contains a comma ",", the program will give an error. (If you get the error, you may use any texteditor to remove the comma)The program can also import ASCII files in the following format:Binding Energy Value 1 Intensity Value 1Binding Energy Value 2 Intensity Value 2etc etc∙The B.E. list must be in ascending or descending order, and the separation of adjacent B.E.s must be the same∙The file cannot have other lines before and after the data∙Sometimes, TAB may cause a reading error.File I/OThe file format of XPSPEAK 4.1 is different from XPSPEAK 3.1, 3.0 and 2.0 ∙XPSPEAK 4.1 can read the file format of XPSPEAK 3.1, 3.0 and 2.0, but not the reverse∙File format of 4.1 is the same as that of 4.0.LimitationsThis program limits the:∙Maximum number of points for each spectrum to 5000∙Maximum of peaks for all the regions to 51∙For each region, the maximum number of peaks is 10. Cautions for Peak FittingSome graduate students believe that the fitting parameters for the best fitted spectrum is the "final answer". This is definitely not true. Adding enough peaks can always fit a spectrum∙Peak fitting only assists the verification of a model∙The user must have a model in mind before adding peaks to the spectrum!Sample Files:gaas.xpsThis file contains 10 spectra1. Use Open XPS to retrieve the file. It includes ten regions∙1-4 for Ga 3d∙5-8 for Ga 3d∙9-10 for S 2p2. For the Ga 3d and As 3d, the peaks are d-type with s.o.s. = 0.3 and 0.9respectively3. Regions 4 and 8 are the sample just after S-treatment4. Other regions are after annealing5. Peak width of Ga 3d and As 3d are constrained to those in regions 1 and56. The fermi level shift of each region was determined using the As 3d5/2peak and the value was put into the "Region Shift" of each region7. Since the region shift takes into account the Fermi level shift, the peakpositions can be easily referenced for the same chemical components in different regions, i.e.∙Peak#1, 3, 5 of Ga 3d are set equal to Peak#0∙Peak#8, 9, 10 of As 3d are set equal to Peak#78. Note that the %GL value of the peaks is 27% using the GL sum functionin Version 4.0, while it is 80% using the GL product function in previous versions.18 Cu2p_bg.xpsThis spectrum was sent to me by Dr. Roland Schlesinger. It shows a background subtraction using the Shirley + Linear method∙See Shirley + Linear Background, (Page 7)Kratos.des∙This file shows a Kratos *.des file∙This is the format your files should be in if they have come from the Kratos instrument∙Use import Kratos to retrieve the file. See Opening Files, (Page 4)∙Note that the four peaks are all s-type∙You may delete peak 2, 4 and change the peak 1,3 to d-type with s.o.s. = 0.7. You may also read in the parameter file: as3d.rpa. ASCII.prn∙This shows an ASCII file∙Use import ASCII to retrieve the file∙It is a As 3d spectrum of GaAs∙In order to fit the spectrum, you need to first add the background and then add two d-type peaks with s.o.s.=0.7∙You may also read in the parameter file: as3d.rpa.Other Files(We don’t have an instrument that produces these files at Auckland University., but you may wish to look at them anyway. See the readme.doc file for more info.)1. Phi.asc2. Leybold.asc3. VAMAS.txt4. VAMASmult.txtHave Fun! July 1, 1999.。
Kinetis MCUs I2C Timing Configuration说明书

1IntroductionThe I 2C module is popular in most applications. Kinetis MCUs provide strong features on the I 2C module, which is compatible with the I 2C-bus specification and easy to interface with other devices. However, incorrect configuration may cause potential timing issues. This document shows how to configure the I 2C timing of a slave device to meet application needs which apply to Kinetis parts that contain I2C IP instead of LPI2C.2OverviewThe I 2C specification defines detailed timing specifications to enable the I 2C device to follow the same standard and make different devices working together. Figure 1. on page 1 shows the timing definition for tSU:DAT.Figure 1.Definition of I2C timingThe Kinetis IP provides register I2Cx_F to tune the timing. The reference manual provides the reference table on how to impact the I 2C baud rate and data hold time. For the slave mode, this register also heavily impacts the timing and incorrect settings mayContents1 Introduction..........................................12 Overview...............................................13 Timing issues caused byincorrect settings..............................24 Tuning the timing using registerI2Cx_F................................................35 Conclusion. (5)6 References...........................................57 Revision history.. (5)AN12377Tuning I2C Timing In Slave ModeRev. 1 — April 2019Application Notecause timing issues. There might not be a clear explanation in the reference manual, but it must be consulted to get a correct configuration.3Timing issues caused by incorrect settingsWhen configuring the I 2C for a master device, most users know how to configure the I2Cx_F register to get the expected baud rate. However, when enabling it in the slave mode, users are not aware of the I2Cx_F function during the timing tuning and do nothing with the I2Cx_F register. In most customer applications, this possibly causes a timing issue. For example, when it works in the slave mode after events (interrupt of receiving new data or transmitting complete) occur, the slave device drives the SCL low by clock stretching and waits to handle I 2C events. It releases the SCL together with the SDA after writing/reading the I 2C data register when the I2Cx_F is set to 0. This causes the master to detect a wrong signal and fail to meet the SDA setup time requirement.Figure 2.on page 2 shows the captured waveform.Figure 2.I2C signals with clock stretching Figure 3. on page 3 shows the clock stretching timing.Timing issues caused by incorrect settingsFigure 3.Clock stretching timingFigure 3. on page 3 shows the SDA and SCL release at almost the same time. For the I2C timing definition to match the values in Figure 4. on page 3, the tSU:DA T minimum value must be around 100 ns in the fast mode and 250 ns in the standard mode. Therefore, the above timing violates the specification.The tSU:DA T timing and the I2C specification give the characteristic parameters shown in Figure 4. on page 3.Figure 4.Characteristics of tSU:DAT4Tuning the timing using register I2Cx_FConfigure the I2Cx_F register to fix the timing issue and get the tSU:DA T using this formula:SDA setup time = I2C module clock period (s) x mul x SDA setup valueNote to keep the SBRC bit field to be 0 in the I2Cx_C2 register when using this solution. Get the SDA setup value from T able 1. I2C setup value on page 4.Table 1.I2C setup valueICR (hex)SDA SetupValueICR(hex)SDA SetupValueICR(hex)SDA SetupValueICR(hex)SDA SetupValue021016206430256 131120218031320 231220228032320 341324239633384 441424249634384 5515282511235448 6616322612836512 7917442717637704 8618322812838512 98194029160396400A101A402A1603A6400B121B482B1923B7680C121C482C1923C7680D141D562D2243D8960E161E642E2563E10240F221F882F3523F1408ICR : register value of bit field ICR of I2C_FSDA Setup Value : number of I2C function clockTable 1. I2C setup value on page 4 is just for reference. Set the I2Cx_F to have a sufficient margin to meet the I Ctiming.For example, when the I2CxF is set to 0x02 and the I2C module clock frequency is 48 MHz, the setup time is calculated as: Setup time = 1/48 MHz * 1 * 3 = 62.5 nsWhen the I2Cx_F value and the setup time value are bigger, they can get a longer margin by setting the big value to I2Cx_F. However, this causes the I2C bus to drop due to clock stretching. Clock stretching happens in the below condition. At the start of a single-bit communication, the master sends the first SCL clock on the bus and the slave samples this pulse and compares it with its own I2Cx_F configuration. If the slave’s baud rate is lower than the master’s baud rate, I2C IP begins to stretch the bus. For example, if the master’s baud rate is 400 kHz and the slave’s baud rate is configured to be 100 kHz by the I2Cx_F register, the final I2C SCL bus period is composed by the slave’s 100-kHz SCL low period time and master’s 400-kHz SCL high period time. The bus period is 0.5 * (1 / 100 K + 1 / 400 K) seconds, so the SCL bus is about 160 kHz.It is recommended to set the slave's baud rate higher than the master baud rate and give a sufficient margin to meet the I2C timing.Conclusion 5ConclusionThis document introduces a way to tune the I2C timing and meet the specifications by setting I2CxF correctly, which helps customers to solve I2C timing issues.6References•I²C-bus Specification, Version 6.0, 4th of April 2014•KL16 Sub-Family Reference Manual with Addendum (document KL16P80M48SF4RM)•Kinetis KL03 reference manual (document KL03P24M48SF0RM)7Revision historyT able 2. Revision history on page 5 summarizes the changes done to this document since the initial release.Table 2.Revision historyHow To Reach Us Home Page: Web Support: /support Information in this document is provided solely to enable system and software implementers to use NXP products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits based on the information in this document. NXP reserves the right to make changes without further notice to any products herein.NXP makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does NXP assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters that may be provided in NXP data sheets and/or specifications can and do vary in different applications, and actual performance may vary over time. All operating parameters, including “typicals,” must be validated for each customer application by customer's technical experts. NXP does not convey any license under its patent rights nor the rights of others. NXP sells products pursuant to standard terms and conditions of sale, which can be found at the following address: / SalesTermsandConditions.While NXP has implemented advanced security features, all products may be subject to unidentified vulnerabilities. Customers are responsible for the design and operation of their applications and products to reduce the effect of these vulnerabilities on customer’s applications and products, and NXP accepts no liability for any vulnerability that is discovered. Customers should implement appropriate design and operating safeguards to minimize the risks associated with their applications and products.NXP, the NXP logo, NXP SECURE CONNECTIONS FOR A SMARTER WORLD, COOLFLUX, EMBRACE, GREENCHIP, HIT AG, I2C BUS, ICODE, JCOP, LIFE VIBES, MIFARE, MIFARE CLASSIC, MIFARE DESFire, MIFARE PLUS, MIFARE FLEX, MANTIS, MIFARE ULTRALIGHT, MIFARE4MOBILE, MIGLO, NTAG, ROADLINK, SMARTLX, SMARTMX, ST ARPLUG, TOPFET, TRENCHMOS, UCODE, Freescale, the Freescale logo, AltiVec, C‑5, CodeTEST, CodeWarrior, ColdFire, ColdFire+, C‑Ware, the Energy Efficient Solutions logo, Kinetis, Layerscape, MagniV, mobileGT, PEG, PowerQUICC, Processor Expert, QorIQ, QorIQ Qonverge, Ready Play, SafeAssure, the SafeAssure logo, StarCore, Symphony, VortiQa, Vybrid, Airfast, BeeKit, BeeStack, CoreNet, Flexis, MXC, Platform in a Package, QUICC Engine, SMARTMOS, Tower, TurboLink, and UMEMS are trademarks of NXP B.V. All other product or service names are the property of their respective owners. AMBA, Arm, Arm7, Arm7TDMI, Arm9, Arm11, Artisan, big.LITTLE, Cordio, CoreLink, CoreSight, Cortex, DesignStart, DynamIQ, Jazelle, Keil, Mali, Mbed, Mbed Enabled, NEON, POP, RealView, SecurCore, Socrates, Thumb, TrustZone, ULINK, ULINK2, ULINK-ME, ULINK-PLUS, ULINKpro, µVision, Versatile are trademarks or registered trademarks of Arm Limited (or its subsidiaries) in the US and/or elsewhere. The related technology may be protected by any or all of patents, copyrights, designs and trade secrets. All rights reserved. Oracle and Java are registered trademarks of Oracle and/or its affiliates. The Power Architecture and word marks and the Power and logos and related marks are trademarks and service marks licensed by .© NXP B.V. 2019.All rights reserved.For more information, please visit: Forsalesofficeaddresses,pleasesendanemailto:**********************Date of release: April 2019Document identifier: AN12377。
Error Reporting 错误报告

Error Reporting 错误报告A:Violations Associated with Buses 有关总线电气错误的各类型(共12项)◆bus indices out of range 总线分支索引超出范围◆Bus range syntax errors 总线范围的语法错误◆Illegal bus range values 非法的总线范围值◆Illegal bus definitions 定义的总线非法◆Mismatched bus label ordering 总线分支网络标号错误排序◆Mismatched bus/wire object on wire/bus 总线/导线错误的连接导线/总线◆Mismatched bus widths 总线宽度错误◆Mismatched bus section index ordering 总线范围值表达错误◆Mismatched electrical types on bus 总线上错误的电气类型◆Mismatched generics on bus (first index) 总线范围值的首位错误◆Mismatched generics on bus (second index) 总线范围值末位错误◆Mixed generics and numeric bus labeling 总线命名规则错误B:Violations Associated Components 有关元件符号电气错误(共20项)◆Component Implementations with duplicate pins usage 元件管脚在原理图中重复被使用◆Component Implementations with invalid pin mappings 元件管脚在应用中和PCB封装中的焊盘不符◆Component Implementations with missing pins in sequence 元件管脚的序号出现序号丢失◆Component contaning duplicate sub-parts 元件中出现了重复的子部分◆Component with duplicate Implementations 元件被重复使用◆Component with duplicate pins 元件中有重复的管脚◆Duplicate component models 一个元件被定义多种重复模型◆Duplicate part designators 元件中出现标示号重复的部分◆Errors in component model parameters 元件模型中出现错误的的参数◆Extra pin found in component display mode 多余的管脚在元件上显示◆Mismatched hidden pin component 元件隐藏管脚的连接不匹配◆Mismatched pin visibility 管脚的可视性不匹配◆Missing component model parameters 元件模型参数丢失◆Missing component models 元件模型丢失◆Missing component models in model files 元件模型不能在模型文件中找到◆Missing pin found in component display mode 不见的管脚在元件上显示◆Models found in different model locations 元件模型在未知的路径中找到◆Sheet symbol with duplicate entries 方框电路图中出现重复的端口◆Un-designated parts requiring annotation 未标记的部分需要自动标号◆Unused sub-part in component 元件中某个部分未使用C:violations associated with document 相关的文档电气错误(共10项)1、conflicting constraints 约束不一致的2、duplicate sheet symbol name 层次原理图中使用了重复的方框电路图3、duplicate sheet numbers 重复的原理图图纸序号4、missing child sheet for sheet symbol 方框图没有对应的子电路图5、missing configuration target 缺少配置对象6、missing sub-project sheet for component 元件丢失子项目7、multiple configuration targets 无效的配置对象8、multiple top-level document 无效的顶层文件9、port not linked to parent sheet symbol 子原理图中的端口没有对应到总原理图上的端口10、sheet enter not linked to child sheet 方框电路图上的端口在对应子原理图中没有对应端口D:violations associated with nets 有关网络电气错误(共19项)1、adding hidden net to sheet 原理图中出现隐藏网络2、adding items from hidden net to net 在隐藏网络中添加对象到已有网络中3、auto-assigned ports to device pins 自动分配端口到设备引脚4、duplicate nets 原理图中出现重名的网络5、floating net labels 原理图中有悬空的网络标签6、global power-objects scope changes 全局的电源符号错误7、net parameters with no name 网络属性中缺少名称8、net parameters with no value 网络属性中缺少赋值9、nets containing floating input pins 网络包括悬空的输入引脚10、nets with multiple names 同一个网络被附加多个网络名11、nets with no driving source 网络中没有驱动12、nets with only one pin 网络只连接一个引脚13、nets with possible connection problems 网络可能有连接上的错误14、signals with multiple drivers 重复的驱动信号15、sheets containing duplicate ports 原理图中包含重复的端口16、signals with load 信号无负载17、signals with drivers 信号无驱动18、unconnected objects in net 网络中的元件出现未连接对象19、unconnected wires 原理图中有没连接的导线E:Violations associated with others有关原理图的各种类型的错误(3项)1、No Error 无错误2、Object not completely within sheet boundaries 原理图中的对象超出了图纸边框3、Off-grid object原理图中的对象不在格点位置F:Violations associated with parameters 有关参数错误的各种类型1、same parameter containing different types 相同的参数出现在不同的模型中2、same parameter containing different values 相同的参数出现了不同的取值Ⅱ、Comparator 规则比较A:Differences associated with components 原理图和PCB上有关的不同(共16项)◆Changed channel class name 通道类名称变化◆Changed component class name 元件类名称变化◆Changed net class name 网络类名称变化◆Changed room definitions 区域定义的变化◆Changed Rule 设计规则的变化◆Channel classes with extra members 通道类出现了多余的成员◆Component classes with extra members 元件类出现了多余的成员◆Difference component 元件出现不同的描述◆Different designators 元件标示的改变◆Different library references 出现不同的元件参考库◆Different types 出现不同的标准◆Different footprints 元件封装的改变◆Extra channel classes 多余的通道类◆Extra component classes 多余的元件类◆Extra component 多余的元件◆Extra room definitions 多余的区域定义B:Differences associated with nets 原理图和PCB上有关网络不同(共6项)◆Changed net name 网络名称出现改变◆Extra net classes 出现多余的网络类◆Extra nets 出现多余的网络◆Extra pins in nets 网络中出现多余的管脚◆Extra rules 网络中出现多余的设计规则◆Net class with Extra members 网络中出现多余的成员C:Differences associated with parameters 原理图和PCB上有关的参数不同(共3项)◆Changed parameter types 改变参数类型◆Changed parameter value 改变参数的取值◆Object with extra parameter 对象出现多余的参数【Violations Associated with Buses】栏——总线电气错误类型(1)【Bus indices out of range】:总线分支索引超出范围。
Spartan-6 FPGA 数据手册:直流及开关特性

Spartan-6 FPGA DC Characteristics
Table 1: Absolute Maximum Ratings (1)
Symbol
VCCINT VCCAUX VCCO VBATT VFS VREF Internal supply voltage relative to GND Auxiliary supply voltage relative to GND Output drivers supply voltage relative to GND Key memory battery backup supply (XC6SLX75, XC6SLX75T, XC6SLX100, XC6SLX100T, XC6SLX150, and XC6SLX150T only) External voltage supply for eFUSE programming (XC6SLX75, XC6SLX75T, XC6SLX100, XC6SLX100T, XC6SLX150, and XC6SLX150T only)(2) Input reference voltage DC Commercial 20% overshoot duration All user and dedicated I/Os Industrial VIN and VTS(3) I/O input voltage or voltage applied to 3-state output, relative to GND(4) Restricted to maximum of 100 user I/Os Industrial 8% overshoot DC 20% overshoot duration 4% overshoot duration(5) 20% overshoot duration Commercial 15% overshoot duration(5) 10% overshoot duration 20% overshoot duration 10% overshoot duration 8% overshoot duration(5) duration(5)
multipleselect 参数-概述说明以及解释

multipleselect 参数-概述说明以及解释1.引言1.1 概述在软件开发中,我们经常需要处理多选参数的情况。
多选参数是指用户可以从一组给定选项中选择一个或多个选项的参数。
这种参数类型在各种应用场景中都非常常见,例如调查问卷、表单提交、用户设置等。
为了实现处理多选参数的功能,我们可以使用多种技术和方法。
其中,一种常见的做法是使用多选框(Checkbox)或多选列表(Multi-select List)来表示可选项,并通过用户的选择来获取参数的值。
多选参数的处理对于开发人员来说是非常重要的,因为它涉及到如何正确地解析和处理用户的选择。
在处理多选参数时,我们需要考虑以下几个方面:1. 可选项的定义:在设计多选参数时,我们首先需要明确可选项的定义。
这包括确定可选项的数据类型、范围和命名规则等。
在确定可选项时,我们应该充分考虑应用的实际需求,确保可选项的合理性和完整性。
2. 参数的传递方式:多选参数可以通过不同的方式进行传递,例如通过URL查询参数、表单提交、API请求等。
根据具体的应用场景和需求,我们可以选择合适的传递方式来传递多选参数,并确保参数的正确性和安全性。
3. 参数的解析和验证:接收到多选参数后,我们需要对参数进行解析和验证。
解析多选参数意味着将用户的选择转化为可操作的数据结构,例如数组或集合。
同时,我们还需要对参数进行合法性验证,以确保用户选择的可选项符合预期的要求。
4. 参数的处理和存储:解析和验证多选参数后,我们可以根据具体的业务逻辑和需求来处理和存储参数。
例如,我们可以将用户的选择保存到数据库中,或者将其用于生成报表、统计数据等。
总之,多选参数的处理是软件开发中不可忽视的一部分。
只有正确地处理多选参数,我们才能满足用户的需求,并保证系统的正常运行。
因此,了解和掌握多选参数的处理方法是每个开发人员都应该具备的技能。
1.2文章结构文章结构文章的结构是指在撰写长文时,所采用的组织和安排方式。
关于MyEclipse8.0安装...
关于MyEclipse8.0安装...关于MyEclipse8.0安装axis2插件问题续之处理报错ng.reflect.InvocationTargetException文章分类:Java编程这个资料是网上一位仁兄写的,很有用,保存起来。
在使用Axis2_Codegen_Wizard时出现问题,最后一步点击finish时,报错ng.reflect.InvocationTargetException等等。
查了网上资料,此问题出现很多,原因各不相同。
相对于Axis2的这个代码生成插件,在国外的一论坛上发现解决方案,尝试有效:1、在axis2-1.4.1-war\axis2\WEB-INF\lib目录下,复制backport-util-concurrent-3.1.jargeronimo-stax-api_1.0_spec-1.0.1.jar这两个文件至MyEclipse 6.5\eclipse\plugins\Axis2_Codegen_Wizard_1.3.0\lib下,同时要编辑MyEclipse 6.5\eclipse\plugins\Axis2_Codegen_Wizard_1.3.0下的plugin.xml,将这两个文件添加进去(复制粘贴两项,修改jar文件名为新拷入的文件名即可),再使用codegen插件即可正常生成代码。
2、若问题仍存在, 尝试改变Eclipse 使用的 JRE,使用 JRE 1.6 ,重新启动 Eclipse。
3、若仍有问题,将$workspace位置\.metadata\.plugins下目录Axis2_Codegen_Wizard 删除,在命令行下切换至$ECLIPSE_HOME目录,然后执行:eclipse -clear4、重新启动 Eclipse ,应可解决问题。
我最后在使用过程中又出现了这样一个异常:Exception in thread "main" org.apache.axis2.wsdl.codegen.CodeGenerationException : Error parsing WSDL,出现了这个错误,我马上上网查资料,中文网站好像还有人解决这个问题,我也查了很多国外网站上面网友提出的相同问题,都没人真正解决这个问题。
cubase erro invoking method -回复
cubase erro invoking method -回复"Cubase Error: Invoking Method" - A Comprehensive Troubleshooting Guide for Cubase UsersIntroduction:Cubase is a popular digital audio workstation (DAW) software used by musicians, composers, and audio engineers around the world. However, like any complex software, users may encounter errors and issues while working with Cubase. One of the common errors that Cubase users face is "Invoking Method." In this comprehensive troubleshooting guide, we will walk you through step-by-step instructions to address this error and get back to your creative process.Section 1: Understanding "Invoking Method" Error1.1 Definition and CausesThe "Invoking Method" error in Cubase occurs when a particular function or action fails to execute properly, resulting in an unexpected interruption. There can be various reasons behind this error, including conflicts with external hardware or software, improper installation, outdated drivers, or corrupt program files.Section 2: Basic Troubleshooting Steps2.1 Restart Cubase and ComputerSometimes, a simple restart can resolve the "Invoking Method" error. Close Cubase, save your work, and restart both the software and your computer. This step often helps to clear temporary files and restart essential services.2.2 Update CubaseEnsure that you are using the latest version of Cubase. Steinberg, the manufacturer of Cubase, regularly releases updates to fix bugs and improve software stability. Visit the official Steinberg website and check for any available updates. If an update is available, install it and check if the error persists.2.3 Disable Third-Party PluginsIncompatibilities with third-party plugins can trigger the "Invoking Method" error. Disable all third-party plugins and test Cubase again. If the error disappears, enable one plugin at a time to identify the problematic one. Contact the plugin manufacturer for an updated version or consider using an alternative plugin.Section 3: Advanced Troubleshooting Steps3.1 Reset Cubase PreferencesCorrupted or incompatible preference files can lead to various errors, including "Invoking Method." To reset Cubase preferences, follow these steps:a. Close Cubase.b. Locate the Cubase Preferences folder. The location varies depending on the operating system. Common locations include: - Windows:C:\Users\[Username]\AppData\Roaming\Steinberg\Cubase - macOS: /Users/[Username]/Library/Preferences/Cubasec. Rename the Cubase Preferences folder to "Cubase Preferences Backup."d. Restart Cubase. The software will create a new set of default preferences.3.2 Update Audio Interface DriversOutdated or incompatible audio interface drivers can cause communication issues between Cubase and the hardware. Visit the manufacturer's website for your audio interface and download the latest drivers compatible with your operating system. Install the drivers and restart your computer before launching Cubase.3.3 Reinstall CubaseIf the above steps fail to resolve the "Invoking Method" error, consider reinstalling Cubase. Uninstall the current version, ensuring all associated files and folders are removed. Download the latest version of Cubase from the official Steinberg website and follow the installation instructions carefully.Conclusion:The "Invoking Method" error in Cubase can disrupt your workflow and creativity. By following the troubleshooting steps outlined in this comprehensive guide, you can address this error and get back to making music with confidence. Remember to keep your software, drivers, and plugins up-to-date to avoid compatibility issues in the future. If the error persists, it is advisable to contact Steinberg support or consult the Cubase community for further assistance.。
langchain的temparature参数

langchain的temparature参数Temperature is an essential parameter that plays a significant role in the functioning of blockchain networks. In the context of Langchain,this parameter is used to adjust the level of decentralization and trust in the network.Temperature can be defined as the number of blocks that can be validated by a single node before the next block is added to the blockchain.In Langchain,the Temperature parameter is used to control the level of decentralization in the network.A low temperature value will result in a more decentralized network,while a higher temperature value will result in a more centralized network.The default value of the Temperature parameter is set to2000,which is relatively low.The Temperature parameter can be adjusted by the network nodes through a process called"minting"and"unminting" transactions.In this process,the network nodes will propose an increase or decrease in the Temperature value, and the other nodes will vote on whether to approve or reject the change.If the Temperature value is increased, it will require more nodes to validate transactions,while a decrease in the Temperature value will reduce the number of nodes that need to validate transactions.The Temperature parameter can also be used to control the level of trust in the network.A low Temperature value will result in a more trustless network,while a higher Temperature value will result in a more trustful network. The default value of the Temperature parameter is set to 2000,which is relatively low.In Langchain,the Temperature parameter is used to control the level of decentralization and trust in the network.Thelower the Temperature,the more centralized the network will be,and the higher the Temperature,the more decentralized the network will be.The network nodes can adjust the Temperature parameter through a process called "minting"and"unminting"transactions to propose changes to the Temperature value.。
解决Hessian调用重载方法报错问题(HessianProtocolException)

解决Hessian调用重载方法报错问题(HessianProtocolException)使用Hessian调用重载方法报异常问题,例如:[java] view plain copy1.String SayHello();2.3.String SayHello(String name);客户端调用上面的方法:[java] view plain copy1.IHello hello = (IHello) hessianProxyFactory.create(IHello.cl ass, url);2.String result = hello.SayHello();("ClientTest1 返回结果:"+result);4.5.result = hello.SayHello("tom");("返回结果:"+result);调用第一个方法是ok,调用第二个方法后会报异常:[java] view plain copy.springframework.web.util.NestedServletException: He ssian skeleton invocation failed; nested exception is com.caucho .hessian.io.HessianProtocolException:2........3.Caused by: com.caucho.hessian.io.HessianProtocolExcepti on: SayHello: expected end of call ('z') at 0x53 (S).4.......caucho.hessian.client.HessianRuntimeException: com .caucho.hessian.io.HessianProtocolException:6........解决方法:方法I、在调用方法前加上下面的设置//设置是否允许重载方法(true:是,会以方法名和参数类型来唯一确定要远程调用的方法,默认为false 以方法名来确定远程调用的方法,以第一个方法名为准)hessianProxyFactory.setOverloadEnabled(true);方法II、在客户端的配置文件中加入:<!-- 解决hessian 方法重载问题 --><property name="overloadEnabled" value="true"></property>。
dc材料
Using the Synopsys® Design Constraints Format Application NoteVersion C-2009.06, June 2009Copyright Notice and Proprietary InformationCopyright © 2009 Synopsys, Inc. All rights reserved. This documentation is furnished under an open-source license agreement and may be used or copied only in accordance with the terms of the license agreement. Anyone receiving and/or using this documentation is bound by the license agreement. Please consult the license agreement for a complete statement of your rights and obligations.Destination Control StatementAll technical data contained in this publication is subject to the export control laws of the United States of America. Disclosure to nationals of other countries contrary to United States law is prohibited. It is the reader’s responsibility to determine the applicable regulations and to comply with them.DisclaimerSYNOPSYS, INC., AND ITS LICENSORS MAKE NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH REGARD TO THIS MA TERIAL, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A P ARTICULAR PURPOSE.Registered Trademarks (®)Synopsys, AMPS, Astro, Behavior Extracting Synthesis T echnology, Cadabra, CA TS, Certify, CHIPit, Design Compiler, DesignWare, Formality, HDL Analyst, HSIM, HSPICE, Identify, iN-Phase, Leda, MAST , ModelTools, NanoSim, OpenVera, PathMill, Physical Compiler, PrimeTime, SCOPE, Simply Better Results, SiVL, SNUG, SolvNet, Syndicated, Synplicity, Synplify, Synplify Pro, Synthesis Constraints Optimization Environment, TetraMAX, the Synplicity logo, UMRBus, VCS, Vera, and YIELDirector are registered trademarks of Synopsys, Inc.Trademarks (™)AFGen, Apollo, Astro-Rail, Astro-Xtalk, Aurora, AvanWaves, BEST, Columbia, Columbia-CE, Confirma, Cosmos, CosmosLE, CosmosScope, CRITIC, CustomSim, DC Expert, DC Professional, DC Ultra, Design Analyzer, Design Vision, DesignerHDL, DesignPower, DFTMAX, Direct Silicon Access, Discovery, Eclypse, Encore, EPIC, Galaxy, Galaxy Custom Designer, HANEX, HAPS, HapsTrak, HDL Compiler, Hercules, Hierarchical Optimization T echnology, High-performance ASIC Prototyping System, HSIM plus , i-Virtual Stepper, IICE, in-Sync, iN-Tandem, Jupiter, Jupiter-DP , JupiterXT , JupiterXT-ASIC, Liberty, Libra-Passport, Library Compiler, Magellan, Mars, Mars-Rail, Mars-Xtalk, Milkyway, ModelSource, Module Compiler, MultiPoint, Physical Analyst, Planet, Planet-PL, Polaris, Power Compiler, Raphael, Saturn, Scirocco, Scirocco-i, Star-RCXT, Star-SimXT , System Compiler, System Designer, T aurus, TotalRecall, TSUPREM-4, VCS Express, VCSi, VHDL Compiler, VirSim, and VMC are trademarks of Synopsys, Inc.Service Marks (SM )MAP-in, SVP Café, and T AP-in are service marks of Synopsys, Inc.SystemC is a trademark of the Open SystemC Initiative and is used under license.ARM and AMBA are registered trademarks of ARM Limited.Saber is a registered trademark of SabreMark Limited Partnership and is used under license.All other product or company names may be trademarks of their respective owners.ContentsWhat’s New in This Release. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viAbout This Application Note. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viCustomer Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix ing the Synopsys Design Constraints FormatAbout the SDC Format. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3 Specifying the SDC Version. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3 Specifying the Units. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4 Specifying the Design Constraints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4 Specifying Design Objects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6 Using Comments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8Generating SDC Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-9 Generating SDC Files From a Synopsys Tool. . . . . . . . . . . . . . . . . . . . . . . . . . 1-9 About the Generated SDC File. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-10 Using Synopsys Tools to Validate SDC Files. . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12Reading SDC Files Into a Synopsys Tool. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13 Determining the SDC Version . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13 Determining the Hierarchy Separator Character . . . . . . . . . . . . . . . . . . . . . . . . 1-13Managing Large SDC Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-14 Appendix A.SDC SyntaxUsing the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06PrefaceThis preface includes the following sections:•What’s New in This Release•About This Application Note•Customer SupportUsing the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06What’s New in This ReleaseThis section describes the enhancements included in Synopsys Design Constraints (SDC) version 1.8.EnhancementsSDC version 1.8 includes the following enhancements:•Support for the following options for the set_timing_derate command:•[-rise] Specify rise derate factor•[-fall] Specify fall derate factor•Support for the following options for the set_voltage command:•max_case_voltage Max-delay (slowest) operating voltage•[-min min_case_value] Min-delay (fastest) operating voltage•[-object_list list_of_power_nets] List of power nets that have the voltages as specified in this commandKnown Limitations and Resolved STARsInformation about known problems and limitations, as well as about resolved Synopsys Technical Action Requests (ST ARs), is available in the product release notes in SolvNet.To see the product release notes,1.Go to https:///ReleaseNotes. (If prompted, enter your user nameand password. If you do not have a Synopsys user name and password, follow theinstructions to register with SolvNet.)2.Click the product name, then click the release you want in the list that appears at thebottom.About This Application NoteThis application note describes the methodology and commands used to transfer constraint information between Synopsys tools and third-party tools using version 1.8 of the SDC format.PrefaceUsing the Synopsys Design Constraints Format Application Note Version C-2009.06 SDC version 1.8 was introduced in the C-2009.06 releases of PrimeTime, Design Compiler, and IC Compiler. It is the recommended SDC version to use with version C-2009.06 and later of these tools.SDC version 1.7 was introduced in the Z-2007.03 release of Design Compiler, IC Compiler, Astro, and Jupiter XT. It is the recommended SDC version to use with version Z-2007.03 and later of these tools.SDC version 1.6 is the recommended SDC version to use with version Y-2006.06 and later of PrimeTime.AudienceThis application note is for engineers who use the SDC format to transfer constraintinformation between Design Compiler, IC Compiler, or PrimeTime and third-party tools.Related PublicationsFor additional information about SDC, see•Documentation on the Web, which is available through SolvNet at http:///DocsOnWeb•The Synopsys MediaDocs Shop, from which you can order printed copies of some Synopsys documents, atY ou might also want to refer to the documentation for the following related Synopsysproducts:•Design Compiler•IC Compiler•PrimeTimePrefaceChapter 1: PrefaceUsing the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06ConventionsThe following conventions are used in Synopsys documentation.Convention DescriptionCourier Indicates command syntax.Courier italic Indicates a user-defined value in Synopsys syntax,such as object_name. (A user-defined value that isnot Synopsys syntax, such as a user-defined valuein a Verilog or VHDL statement, is indicated byregular text font italic.)Courier bold Indicates user input—text you type verbatim—inSynopsys syntax and examples. (User input that isnot Synopsys syntax, such as a user name orpassword you enter in a GUI, is indicated by regulartext font bold.)[ ]Denotes optional parameters, such aspin1 [pin2 ... pinN]|Indicates a choice among alternatives, such aslow | medium | high(This example indicates that you can enter one ofthree possible values for an option:low, medium, or high.)_Connects terms that are read as a single term bythe system, such asset_annotated_delayControl-c Indicates a keyboard combination, such as holdingdown the Control key and pressing c.\Indicates a continuation of a command line./Indicates levels of directory structure.Edit > Copy Indicates a path to a menu command, such asopening the Edit menu and choosing Copy.PrefaceUsing the Synopsys Design Constraints Format Application Note Version C-2009.06Customer SupportCustomer support is available through SolvNet online customer support and throughcontacting the Synopsys Technical Support Center.Note:SolvNet online customer support and the Synopsys Technical Support Center areavailable to Synopsys customers only. TAP-in partners might not have access to theseresources.Accessing SolvNetSolvNet includes an electronic knowledge base of technical articles and answers tofrequently asked questions about Synopsys tools. SolvNet also gives you access to a wide range of Synopsys online services including software downloads, documentation on the Web, and “Enter a Call With the Support Center.”To access SolvNet,1.Go to the SolvNet Web page at https://.2.If prompted, enter your user name and password. (If you do not have a Synopsys username and password, follow the instructions to register with SolvNet.)If you need help using SolvNet, click HELP in the top-right menu bar or in the footer.Contacting the Synopsys Technical Support CenterIf you have problems, questions, or suggestions, you can contact the Synopsys T echnical Support Center in the following ways:•Open a call to your local support center from the Web by going to https:// (Synopsys user name and password required), then clicking“Enter a Call With the Support Center.”•Send an e-mail message to your local support center.•E-mail support_center@ from within North America.•Find other local support center e-mail addresses at/Support/GlobalSupportCenters/Pages.•Telephone your local support center.•Call (800) 245-8005 from within the continental United States.PrefaceChapter 1: PrefaceUsing the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06•Call (650) 584-4200 from Canada.•Find other local support center telephone numbers at/Support/GlobalSupportCenters/Pages.Preface1Using the Synopsys Design Constraints FormatSynopsys Design Constraints (SDC) is a format used to specify the design intent, including the timing, power, and area constraints for a design. SDC is based on the tool command language (Tcl). The Synopsys Design Compiler, IC Compiler, and PrimeTime tools use the SDC description to synthesize and analyze a design. In addition, these tools can generate SDC descriptions for and read SDC descriptions from third-party tools. This application note describes how to share constraint information between third-party EDA tools and these Synopsys tools using SDC files. Figure1-1 shows this SDC-based interface.Use the SDC-based flow described in this document to share constraint informationbetween Synopsys and third-party EDA tools.Using the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06Figure 1-1SDC-Based Constraint InterfaceNote:There are slight differences between the SDC files generated by the Synopsys tools. For more information, see “About the Generated SDC File” on page 1-10.This application note describes the SDC-based interface in the following sections:•About the SDC Format•Generating SDC Files•Reading SDC Files Into a Synopsys Tool•Managing Large SDC Files SDC fileThird-party write_sdcread_sdcSDC fileEDA toolSynopsys toolSynopsystoolUsing the Synopsys Design Constraints Format Application Note Version C-2009.06About the SDC FormatSDC is a Tcl-based format. All commands in an SDC file conform to the Tcl syntax rules.Y ou use an SDC file to communicate the design intent, including timing and arearequirements between EDA tools. An SDC file contains the following information:•The SDC version (optional)•The SDC units (optional)•The design constraints•Comments (optional)Note:An SDC file does not contain commands to load or link the design. Y ou must performthese tasks before reading an SDC file.Specifying the SDC VersionThe sdc_version variable specifies the SDC version for the file. To specify the SDCversion, set this variable in the first command in the SDC file:set sdc_version valueIf the SDC file does not specify a version, Design Compiler, IC Compiler, and PrimeTime assume that the file uses SDC version 1.8 syntax. The SDC syntax is specified in Appendix A, “SDC Syntax.”If the SDC file does not specify a version, the assumed version depends on the tool reading the file. Set this variable in your SDC file to ensure compatability.SDC version 1.8 was introduced in the C-2009.06 release of PrimeTime, Design Compiler, and IC Compiler. It is the recommended SDC version to use with version C-2009.06 and later of these tools.If the third-party EDA tool you are using supports an earlier version of the SDC format, set this variable to ensure compatibility with the Synopsys tools.Using the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06Specifying the UnitsThe set_units command specifies the units used in the SDC file. Y ou can specify the units for capacitance, resistance, time, voltage, current, and power.The syntax of the set_units command isset_units -capacitance cap_unit -resistance res_unit-time time_unit -voltage voltage_unit-current current_unit -power power_unitSpecifying the Design ConstraintsY ou specify design constraints using Synopsys constraint commands. Y ou can break up a long command line into multiple lines by using the backslash character (\) to indicatecommand continuation. The SDC format consists of the Synopsys constraint commands listed in Table1-1.Note:The SDC format supports a subset of the command arguments, as compared to thearguments supported by the individual tools. For a listing of the supported arguments,see Appendix A, “SDC Syntax.” For information about individual tool support, seeSolvNet article 015193. For information about validating your SDC file, see “UsingSynopsys Tools to Validate SDC Files” on page1-12.Table 1-1SDC CommandsType of information CommandsOperating conditions set_operating_conditionsWire load models set_wire_load_min_block_sizeset_wire_load_modeset_wire_load_modelset_wire_load_selection_groupSystem interface set_driveset_driving_cellset_fanout_loadset_input_transitionset_loadset_port_fanout_numberUsing the Synopsys Design Constraints Format Application Note Version C-2009.06Table 1-1SDC Commands (Continued)Type of information CommandsDesign rule constraints set_max_capacitanceset_max_fanoutset_max_transitionset_min_capacitanceTiming constraints create_clockcreate_generated_clockgroup_pathset_clock_gating_checkset_clock_groupsset_clock_latencyset_clock_senseset_clock_transitionset_clock_uncertaintyset_data_checkset_disable_timingset_ideal_latencyset_ideal_networkset_ideal_transitionset_input_delayset_max_time_borrowset_output_delayset_propagated_clockset_resistanceset_timing_derateTiming exceptions set_false_pathset_max_delayset_min_delayset_multicycle_pathArea constraints set_max_areaUsing the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06Specifying Design ObjectsMost of the constraint commands require a design object as a command argument. SDC supports both implicit and explicit object specification.If you specify a simple name for an object, the Synopsys tools determine the object type by searching for the object using a prioritized object list. The priority order varies by command and is documented in each command’s man page. This is called implicit object specification.To avoid ambiguity, explicitly specify the object type by using a nested object accesscommand. For example, if you have a cell in the current instance named U1, the implicit specification is U1, while the explicit specification is [get_cells U1].Table 1-2 shows the design objects supported by the SDC format and the accesscommands used for explicit object specification.Note:The SDC format supports a subset of the access command syntax, as compared to the syntax supported by the individual tools. For a listing of the supported syntax, seeAppendix A, “SDC Syntax.” For information about individual tool support, see SolvNetarticle 015193.Multivoltage and power optimization constraintscreate_voltage_areaset_level_shifter_strategyset_level_shifter_thresholdset_max_dynamic_powerset_max_leakage_power Logic assignments set_case_analysisset_logic_dcset_logic_oneset_logic_zeroTable 1-1SDC Commands (Continued)Type of information CommandsUsing the Synopsys Design Constraints Format Application Note Version C-2009.06Specifying Multiple ObjectsBoth the constraint commands and the object access commands follow the Tcl syntax rules. Use a Tcl list or wildcard characters to specify multiple objects. SDC supports the following wildcard characters:Note:In SDC version 1.5 and later, if you do not specify an object argument for an objectaccess command, SDC interprets the command as if you specified the * wildcardcharacter.Table 1-2SDC Design Objects Design object Access commandDescription design current_design A container for cells.A block.clock 1get_clocksall_clocksA clock in a design.All clocks in a design.port get_portsall_inputsall_outputs An entry point to or exit point from a design.All entry points to a design.All exit points from a design.cell get_cells An instance of a design or library cell.pin get_pins An instance of a design port or library cell pin.net get_nets A connection between cell pins and design ports.library get_libs A container for library cells.lib_cell get_lib_cells A primitive logic element.lib_pin get_lib_pins An entry point to or exit point from a lib_cell.registerall_registers A sequential logic cell.1.The clock design object includes both standard clocks and generated clocks.Matches exactly one character.*Matches zero or more characters.Using the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06Specifying Hierarchical ObjectsThe reference point for all object specifications is the current instance. By default, thetop-level design is the current instance. Y ou can change the current instance by using the current_instance command.Design Compiler and IC Compiler always use a slash (/) as the hierarchy separator.PrimeTime supports a user-defined hierarchy separator (as specified by thehierarchy_separator variable), with a slash (/) being the default value.In some cases, the character used to indicate hierarchy levels (the hierarchy separator character) is also used within design object names. This can lead to an ambiguous hierarchy definition within the SDC file.Note:The hierarchy definition is never ambiguous within the Synopsys tool, because thesearch engines within these tools can correctly decode the object names.The SDC format supports the following characters as hierarchy separator characters: slash (/), at sign (@), caret (^), pound sign (#), period (.), and vertical bar (|), with the slash (/) being the default.To create an unambiguous hierarchy definition, the SDC file uses another character as the hierarchy separator character whenever a design uses a slash (/) within object names.Within the SDC file, a nondefault hierarchy separator character is specified either globally, using the set_hierarchy_separator statement, or locally, by using the -hsc option on the object access commands.Specifying BusesSpecify buses using the Verilog-style naming convention name[index] and enclose the name in curly braces. For example,create_clock -period 10 [get_clocks {CLK[0]}]Using CommentsY ou can add comments to an SDC file either as complete lines or as fragments after acommand.To identify a line as a comment, start the line with a pound sign (#).# This is an SDC comment line.To add a comment after a command, end the command using a semicolon, then precede the comment with a pound sign (#).create_clock -period 10 [get_ports CLK]; # comment fragmentUsing the Synopsys Design Constraints Format Application Note Version C-2009.06Generating SDC FilesY ou can generate an SDC file in the following ways:•Using the Synopsys Design Compiler, IC Compiler, or PrimeTime tools•Using a third-party EDA tool that supports the SDC format•Writing the file manuallyThe SDC files generated by Synopsys tools always meet the SDC format requirements. If you generate an SDC file using a third-party tool or by writing the file manually, you should validate the file syntax. For information about validating the file syntax, see “Using Synopsys Tools to Validate SDC Files” on page1-12.Generating SDC Files From a Synopsys ToolTo generate an SDC file from Design Compiler, IC Compiler, or PrimeTime, use thewrite_sdc command.write_sdc file_nameThe write_sdc command writes the constraints for the current design and its hierarchy to the specified file. By default, the write_sdc command generates the file with the latest syntax. To generate the file with an earlier SDC version, use the -version option when you invoke the write_sdc command.When you generate an SDC file using syntax version 1.8, the write_sdc command writes the design units, as specified in the main library file, to the SDC file.The constraints can either be set from a script file or derived through characterization or budgeting. The order of commands in the SDC file does not indicate constraint precedence.The write_sdc command writes the design constraints to the SDC file in expanded format.This means that the generated SDC files contain a command for each constraint attribute that exists on each design object. Each design object is represented by its full hierarchical name and is selected by using the appropriate object access function (see Table1-2 on page1-7 for a listing of object access functions). Each command line contains all command options; those that are not specified on the design are assigned default values. For details about the expanded format, see “About the Generated SDC File” on page1-10.Buses that have constraints set on them get expanded during write_sdc. For example, if you use the set_input_delay command on a bus, then during write_sdc, DesignCompiler, IC Compiler, and PrimeTime expand the bus name to all bits of the bus.Using the Synopsys Design Constraints Format Application Note C-2009.06 Using the Synopsys Design Constraints Format Application Note Version C-2009.06Because the constraints are written in expanded format, the size of the SDC file increases proportionately with the number of constraints. In particular, the use of timing exceptions increases the size of the generated SDC file. See “Managing Large SDC Files” onpage1-14 for tips on how to use these large files.Note:The commands generated by the write_sdc command might differ between Synopsys tools. However, the generated commands meet the SDC requirements and capture the same intent.About the Generated SDC FileAlthough the SDC file generated by the write_sdc command captures the same intent as the constraints you specified, the format of the constraints will not be identical to the input format you used. In addition, there are slight differences between the SDC file generated by the different Synopsys tools.For example, assume you enter the following constraint:create_clock -period 100 clkThe SDC file generated by Design Compiler represents this constraint ascreate_clock -period 100 -waveform {0 50} [get_ports {clk}]The SDC file generated by PrimeTime represents this constraint ascreate_clock -name clk -period 100.000000 \-waveform { 0.000000 50.000000 } [get_ports {clk}]The SDC file generated by the write_sdc command might differ from the input constraints in the following ways:•Specification of design objects•Explicit specificationThe SDC file specifies all design objects using object access commands (seeTable1-2 on page1-7 for the listing of object access commands for each designobject). Because the argument to the object access commands is a Tcl list, the SDCfile expresses the design objects as a Tcl list (either as a list of strings within curlybraces ({}) or by using the Tcl list command).For example, if you specified clock CLK using the following command,create_clock -period 10 CLKthe corresponding SDC command is (the added text is shown in bold):create_clock -period 10 [get_clocks {CLK}]Using the Synopsys Design Constraints Format Application Note Version C-2009.06•Direct specificationDirect specification of a design object uses the object name as the argument to theobject access command. Y ou can indirectly specify design objects through use of the-of_objects option of an object access command. The SDC file specifies all objectsdirectly.For example, if you specified port IN1 using the following command,set_input_delay 5 -clock [get_clocks CLK] \[get_ports -of_objects [get_nets n_in1]]the corresponding SDC command is (changed text is shown in bold):set_input_delay 5 -clock [get_clocks {CLK}] \[get_ports {IN1}]•Wildcard expansionThe generated SDC file does not include wildcard characters. In some cases, the SDCfile includes a separate command for each design object represented by a wildcardspecification. In other cases, the SDC file includes a single command with a list ofdesign objects as its argument.For example, if you specified ports IN1, IN2, and IN3 using the following command,set_input_delay 5 -clock [get_clocks CLK] \[get_ports IN*]the corresponding SDC commands are (changed text is shown in bold):set_input_delay 5 -clock [get_clocks {CLK}] \[get_ports {IN1}]set_input_delay 5 -clock [get_clocks {CLK}] \[get_ports {IN2}]set_input_delay 5 -clock [get_clocks {CLK}] \[get_ports {IN3}]If you specified ports IN1, IN2, and IN3 using the following command,set_false_path -from [get_ports IN*]the corresponding SDC command is (changed text is shown in bold):set_false_path -from [get_ports {IN1 IN2 IN3}]•Hierarchy separator characterIf the hierarchy separator character is used in an object name, the tool uses a differenthierarchy separator character in the SDC file to make the hierarchy definitionunambiguous.。
ABPSwagger支持方法重载

ABPSwagger⽀持⽅法重载报错ERROR 2020-10-16 11:31:20,598 [10 ] Microsoft.AspNetCore.Server.Kestrel - Connection id "0HM3HGFH7B4U2", Request id "0HM3HGFH7B4U2:00000003": An unhandled exception was thrown by the application.System.NotSupportedException: HTTP method "POST" & path "api/services/app/ExcelImport/ExcelToDataSet" overloaded by actions - BIMMP.DataImporting.ExcelImport.ExcelToDataSet (BIMMP.Application),BIMMP.DataImporting.ExcelImpo at Swashbuckle.AspNetCore.SwaggerGen.SwaggerGenerator.CreatePathItem(IEnumerable`1 apiDescriptions, ISchemaRegistry schemaRegistry)at System.Linq.Enumerable.ToDictionary[TSource,TKey,TElement](IEnumerable`1 source, Func`2 keySelector, Func`2 elementSelector, IEqualityComparer`1 comparer)at Swashbuckle.AspNetCore.SwaggerGen.SwaggerGenerator.CreatePathItems(IEnumerable`1 apiDescriptions, ISchemaRegistry schemaRegistry)at Swashbuckle.AspNetCore.SwaggerGen.SwaggerGenerator.GetSwagger(String documentName, String host, String basePath, String[] schemes)at Swashbuckle.AspNetCore.Swagger.SwaggerMiddleware.Invoke(HttpContext httpContext, ISwaggerProvider swaggerProvider)at Microsoft.AspNetCore.Routing.EndpointMiddleware.Invoke(HttpContext httpContext)at Microsoft.AspNetCore.Routing.EndpointRoutingMiddleware.Invoke(HttpContext httpContext)at Microsoft.AspNetCore.Builder.RouterMiddleware.Invoke(HttpContext httpContext)at Microsoft.AspNetCore.Localization.RequestLocalizationMiddleware.Invoke(HttpContext context)at Microsoft.AspNetCore.Authentication.AuthenticationMiddleware.Invoke(HttpContext context)at Microsoft.AspNetCore.StaticFiles.StaticFileMiddleware.Invoke(HttpContext context)at Abp.AspNetCore.Security.AbpSecurityHeadersMiddleware.Invoke(HttpContext httpContext) in D:\Github\aspnetboilerplate\src\Abp.AspNetCore\AspNetCore\Security\AbpSecurityHeadersMiddleware.cs:line 26at Microsoft.AspNetCore.Server.IISIntegration.IISMiddleware.Invoke(HttpContext httpContext)at Microsoft.AspNetCore.Server.Kestrel.Core.Internal.Http.HttpProtocol.ProcessRequests[TContext](IHttpApplication`1 application)解决services.AddSwaggerGen(c =>{c.ResolveConflictingActions(apiDescriptions => apiDescriptions.First());});。
yapi自动化安装遇到的问题

yapi⾃动化安装遇到的问题yapi版本: 1.10.2yapi server 启动之后填写好配置,点击开始部署,发现控制台打印如下⽇志(node:19879) Warning: Accessing non-existent property 'cat' of module exports inside circular dependency (Use node --trace-warnings ... to show where the warning was created)(node:19879) Warning: Accessing non-existent property 'cd' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'chmod' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'cp' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'dirs' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'pushd' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'popd' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'echo' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'tempdir' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'pwd' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'exec' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'ls' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'find' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'grep' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'head' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'ln' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'mkdir' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'rm' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'mv' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'sed' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'set' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'sort' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'tail' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'test' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'to' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'toEnd' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'touch' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'uniq' of module exports inside circular dependency (node:19879) Warning: Accessing non-existent property 'which' of module exports inside circular dependency。
.NetCore3.0迁移遇到的各种问题
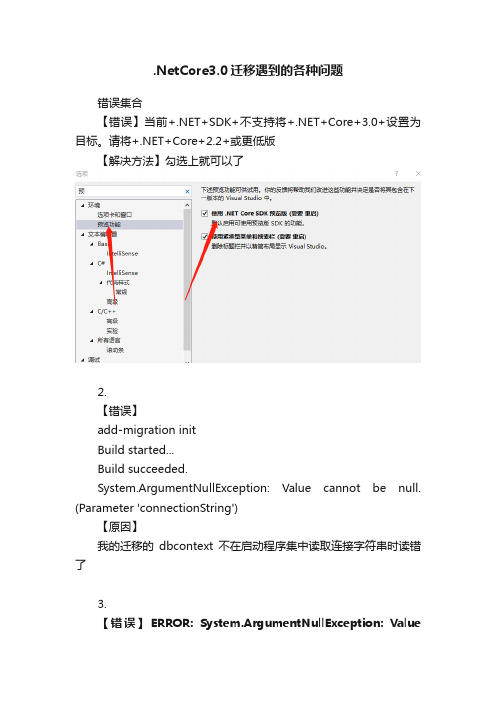
.NetCore3.0迁移遇到的各种问题
错误集合
【错误】当前+.NET+SDK+不支持将+.NET+Core+3.0+设置为目标。
请将+.NET+Core+2.2+或更低版
【解决方法】勾选上就可以了
2.
【错误】
add-migration init
Build started...
Build succeeded.
System.ArgumentNullException: Value cannot be null. (Parameter 'connectionString')
【原因】
我的迁移的dbcontext不在启动程序集中读取连接字符串时读错了
3.
【错误】ERROR: System.ArgumentNullException: Value
cannot be null. Parameter name: type at System.Activator.CreateInstance(Type type, Boolean nonPublic)
【原因】
在程序集属性里改改过名字所以dll与路径不匹配
【解决方法】可以先移除再改过名字再添加项目
4.
【错误】build fail
【原因】我的是忘记设置启动项了
【解决方法】
1.设置启动项
2.有错误提示未解决编译失败。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
132
O. CHAPELLE ET AL.
that the naive strategy which is exhaustive search in the parameter space becomes intractable since it would correspond to running the algorithm on every possible value of the parameter vector (up to some discretization). We propose here a methodology for automatically tuning multiple parameters for the Support Vector Machines (SVMs) which takes advantage of the specific properties of this algorithm. The SVM algorithm. Support vector machines (SVMs) realize the following idea: map a n -dimensional input vector x ∈ Rn 1 into a high dimensional (possibly infinite dimensional) feature space H by and construct an optimal separating hyperplane in this space. Different mappings construct different SVMs. When the training data is separable, the optimal hyperplane is the one with the maximal distance (in H space) between the hyperplane and the closest image (xi ) of the vector xi from the training data. For non-separable training data a generalization of this concept is used. Suppose that the maximal distance is equal to γ and that the images (x1 ), . . . , (x ) of the training vectors x1 , . . . , x are within a sphere of radius R . Then the following theorem holds true (Vapnik & Chapelle, 2000). Theorem 1. Given a training set Z = {(x1 , y1 ), . . . , (x , y )} of size , a feature space H and a hyperplane (w,b), the margin γ (w, b, Z ) and the radius R ( Z ) are defined by γ (w, b, Z ) = min R ( Z ) = min
OLIVIER CHAPELLE LIP6, Paris, France VLADIMIR VAPNIK AT&T Research Labs, 200 Laurel Ave, Middletown, NJ 07748, USA OLIVIER BOUSQUET ´ Ecole Polytechnique, France SAYAN MUKHERJEE MIT, Cambridge, MA 02139, USA Editor: Nello Cristianini olivier.chapelle@lip6.fr
a,xi
yi (w · (xi ) + a
(xi , yi )∈ Z
(xi ) + b) w
The maximum margin algorithm L : (X × Y ) → H × R takes as input a training set of size and returns a hyperplane in feature space such that the margin γ (w, b, Z ) is maximized. Note that assuming the training set separable means that γ > 0. Under this assumption, for all probability measures P underlying the data Z , the expectation of the misclassification probability perr (w, b) = P (sign(w · has the bound E { perr ( L
CHOOSING MULTIPLE PARAMETERS FOR SUPPORT VECTOR MACHINES
133
Note however that according to the theorem the average performance depends on the ratio E { R 2/γ 2 } and not simply on the large margin γ . Why multiple parameters? The SVM algorithm usually depends on several parameters. One of them, denoted C , controls the tradeoff between margin maximization and error minimization. Other parameters appear in the non-linear mapping into feature space. They are called kernel parameters. For simplicity, we will use a classical trick that allows us to consider C as a kernel parameter, so that all parameters can be treated in a unified framework. It is widely acknowledged that a key factor in an SVM’s performance is the choice of the kernel. However, in practice, very few different types of kernels have been used due to the difficulty of appropriately tuning the parameters. We present here a technique that allows to deal with a large number of parameters and thus allows to use more complex kernels. Another potential advantage of being able to tune a large number of parameters is the possibility of rescaling the attributes. Indeed, when no a priori knowledge is available about the meaning of each of the attributes, the only choice is to use spherical kernels (i.e. give the same weight to each attribute). But one may expect that there is a better choice for the shape of the kernel since many real-world database contain attributes of very different natures. There may thus exist more appropriate scaling factors that give the right weight to the right feature. For example, we will see how to use radial basis function kernels (RBF) with as many different scaling factors as input dimensions: K (x, z) = exp −
Machine Learning, 46, 131–159, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands.
Choosing Multiple Parameters for Support Vector Machines
−1 ( Z ))}
(X) + b) = Y )
≤
1
E
R2( Z ) γ 2 ( L ( Z ), Z)
.
The expectation is taken over the random draw of a training set Z of size − 1 for the left hand side and size for the right hand side. This theorem justifies the idea of constructing a hyperplane that separates the data with a large margin: the larger the margin the better the performance of the constructed hyperplane.