630吨压铸机自动浇注机械手设计
自动浇铸机械手(最终版)

毕业设计开题报告设计题目: 自动浇铸机械手设计院系名称: 机电工程学院专业班级: 机械10-班学生姓名:导师姓名:开题时间: 2014年3月22 日指导委员会审查意见:签字:年月日1课题研究的目的和意义1962年美国制造出第一台实用的示教型工业机器人以来,国际上对工业机器人的开发、研究和应用已有50余年的历程。
工业机械手延伸和扩大了人的手足和大脑等功能,它可以代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作,代替人完成繁重、单调重复劳动,提高劳动生产率,保证产品质量。
目前,工业机械手主要应用于制造业中,特别是电器制造、汽车制造、塑料加工、通用机械制造及金属加工等工业。
以日、美、德、法、韩等为代表,许多国家的机器人产业日趋成熟和完善,所生产的工业机器人已成为一种标准设备在全球得到广泛应用。
由于制造企业技术的不断进步,对工业机器人的需求越来越大,因而工业机器人技术在制造业应用范围也越来越大,其标准化、模块化、网络化和智能化的程度越来越高,功能也越来越强,正在向着成套技术和装备的方向发展。
在发达国家中,工业机器人自动化生产线成套装备已成为自动化装备的主流及未来的发展方向。
而机械手作为工业机器人的基础部分,更有研究价值。
机械手是模仿人手的部分动作,按给定的程序轨迹和要求实现自动抓取、搬运或工作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,铸、锻、焊接、热处理、电镀、喷漆、装置以及轻工业、交通运输等方面得到越来越广泛的应用。
因此研究机械手是十分必要的。
本文就对自动浇铸机械手进行研究。
2文献综述(课题研究现状及分析)2.1机械手的发展水平机械手首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机械手。
基于PLC的压铸取件机械手控制系统设计
2017第5期总第246期现代制造技术与装备引言随着工业技术中自动化水平的不断提高,机械手在工业生产中得到了广泛应用。
压力铸造是一种较为特殊的铸造方式,主要是把熔融的合金溶液在高压条件下高速充满型腔,且同样在高压条件下冷却成型,是一种较为精密的铸造。
铸造生产过程中,取件过程是一个较为重要的工作环节,若能用机械手代替人工操作来取件,将会有效提高压铸机加工效率,减少高压高速环境下对人体的危害和环境的污染。
本文利用PLC、传感器、气缸、行程开关等重要的元器件,设计了压铸取件机械手的控制系统。
可以通过光机电一体化的方式完全实现取件自动化,大大减轻了工人的劳动强度,且有效避免了意外事故的发生。
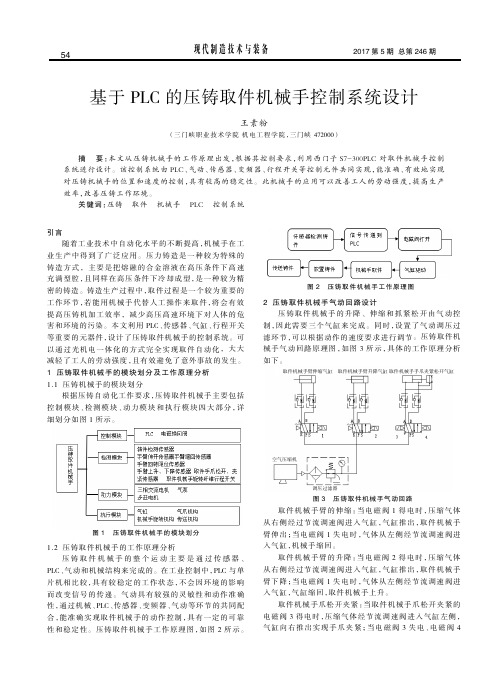
1压铸取件机械手的模块划分及工作原理分析1.1压铸机械手的模块划分根据压铸自动化工作要求,压铸取件机械手主要包括控制模块、检测模块、动力模块和执行模块四大部分,详细划分如图1所示。
1.2压铸取件机械手的工作原理分析压铸取件机械手的整个运动主要是通过传感器、PLC、气动和机械结构来完成的。
在工业控制中,PLC与单片机相比较,具有较稳定的工作状态,不会因环境的影响而改变信号的传递。
气动具有较强的灵敏性和动作准确性,通过机械、PLC、传感器、变频器、气动等环节的共同配合,能准确实现取件机械手的动作控制,具有一定的可靠性和稳定性。
压铸取件机械手工作原理图,如图2所示。
2压铸取件机械手气动回路设计压铸取件机械手的升降、伸缩和抓紧松开由气动控制,因此需要三个气缸来完成。
同时,设置了气动调压过滤环节,可以根据动作的速度要求进行调节。
压铸取件机械手气动回路原理图,如图3所示,具体的工作原理分析如下。
取件机械手臂的伸缩:当电磁阀1得电时,压缩气体从右侧经过节流调速阀进入气缸,气缸推出,取件机械手臂伸出;当电磁阀1失电时,气体从左侧经节流调速阀进入气缸,机械手缩回。
取件机械手臂的升降:当电磁阀2得电时,压缩气体从右侧经过节流调速阀进入气缸,气缸推出,取件机械手臂下降;当电磁阀1失电时,气体从左侧经节流调速阀进入气缸,气缸缩回,取件机械手上升。
铸造机机械手自动浇注控制系统_田奎

信息技术与信息化铸造机机械手自动浇注控制系统自动控制田* 孙涛孙风玲张岳TIAN Kui SUN Tao SUN Feng -ling ZHANG Yue摘要本文介绍了一种以西门子SIMOTION C240 运动控制系统为核心的活塞铸造机自动化控制。
关键词铸造机械手活塞铸造生产线伺服控制运动控制系统多轴同步doi:10.3969 / j.issn.1672 -9528.2012.05.271 引言全保护功能完善,故障诊断报警详细,并能适应高温及粉尘大的环境。
随着汽车、船舶、农机市场的发展,对发动机活塞的需求越来越旺盛。
许多活塞生产企业在扩大产能的时候,更重视对生产线进行自动化升级改造,以改变恶劣的作业环境和高强度的体力劳动同时增加产品的稳定性。
活塞铸造属于批量大、节拍快、比较精密的铸造加工,对控制设备的要求很高,既要实现铸造机机械手的准确路径设定,又要完成整机的开关量复杂的逻辑控制和模拟信号检测,同时,还要根据产品型号和工艺要求通过操作面板快速切换到新的铸造程序,并应具备高温、粉尘、电磁干扰等现场恶劣环境下的高可靠性能。
根据市场需要,我公司定制开发了一套满足自动化浇注需要的铸造机及其配套浇注机械手一体化控制系统。
系统选用了西门子公司的SIMOTION C240 运动控制系统,一套装置既实现了机械手动作控制又完成了铸造机逻辑控制,实现了活塞浇注,凝固,出模,淬火,卸料等主要工序自动化。
基于对铸造机现场环境和使用的特点我们认为其控制系统需要满足以下要求:(1)系统功能完善.既要有满足浇注机械手六轴定位及倾转浇铸跟随运动又要求随时检测铸造机的状态和控制铸造机执行元件;(2)软硬件满足一定的安全要求,保证设备和人身安全;(3)市场接受程度高,零备件供应及时;(4)用户的技术人员对相应产品有一定了解,厂内同类设备较多;(5)对将来厂级通讯联网和制造信息化管理有一定的扩展能力。
通过分析比较我们采用了西门子SIMOTIONC240 运动控制器为控制单元加S7 -300 系列输入输出模块,传动部分使用了六套西门子S120 伺服控制器和六台西门子1FK7063 伺服电机,显示和人机对话采用西门子MP377 键控屏,通过PROFIBUS 形成现场总线通讯。
压铸机自动浇铸机械手
摘要本文简要介绍了工业机器人的概念,浇注机械手硬件和软件的组成,机械手各个部件的整体尺寸设计。
本文着重对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转液压缸的驱动力矩。
设计了机械手的手臂结构。
设计出了机械手的液压系统,绘制了机械手液压系统工作原理图,大大提高了绘图效率和图纸质量。
关键词:工业机器人机械手浇注机械手AbstractAt first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. What’s more, the paper accounts for the background and the primary mission of the topic.The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm.KEY WORDS:industrial robot manipulator pump air pressure drive第1章绪言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
自动浇铸机械手说明书

摘要本文简要介绍了工业机械人的概念,浇铸机械手的组成,机械手的各个部件的整体尺寸设计。
本文着重对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的手部结构,设计了机械手的手腕结构,计算了手腕转动时所需的驱动力矩和回转液压缸的驱动力矩。
设计了机械手的手臂结构。
设计出了机械手的液压系统,绘制了机械手液压系统工作原理图,大大提高了绘图效率和图纸质量。
关键词:工业机械人机械手浇铸机械手AbstractAt first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development brief. What is more, the paper accounts for the background and the primary mission of the topic. The paper introduces the function composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator. The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump. The paper designs the structure of the arm.KeyWords:industrial robot manipulator pump air pressure drive目录摘要 (I)Abstract (II)1绪论 (1)1.1机械手的分类 (2)1.2机械手的组成 (4)1.3应用机械手的意义 (6)1.4用机械手的历史 (7)2 总体技术方案及系统组成 (8)2.1原始数据 (8)2.2 工作需要 (9)2.3 工作结构 (10)2.4 动作分析 (10)2.5总体技术方案 (11)3 手部机构设计 .......................................................................... 错误!未定义书签。
压铸机自动浇铸机械手设计答辩稿

压铸机自动浇铸机械手设计
答辩人:
指导老师:
1设计背景2设计要求34设计成果设计过程
设计背景
浇铸是高温、高危的,人类无法直接接触高温钢铁溶液,只能通过机械来代替人类的活动。
这样就必须开始设计一种机器能够在高温环境下仍能正常工作,还有就是浇铸本身出在一个污染严重的、躁声大的环境当中,一般的机器可能在此环境下不能正常工作或寿命难以保证,因此要设计的机械要耐高温,寿命和安全系数要高。
设计要求
本次设计的机械手要求用于汽车附件生产的630吨的压力铸造机浇铸铝合金熔液,实现将三个不同容量的浇包(4、6、8公斤)从保温炉内将铝合金溶液运送到压铸机压射缸口并实现倾倒的过程,配合压铸机的工作。
要求浇包的最大提升高度为1600mm,回转范围110度,俯仰角为54度,浇包倾角为70度完成浇铸。
设计过程
本次的机械手设计包括机械结构的设计及其驱动方式(液压系统)的设计。
首先,根据所需要求先后设计确定的机械手手部结构及手臂的结构及尺寸参数;
然后根据所设计的结构尺寸计算各个部件的质量进而求出三个油缸(倾倒油缸、提升油缸和回转油缸)负载。
最后设计液压系统,求出液压系统的参数。
设计结果
点击添加标题
谢谢聆听答辩结束请老师提问。
铸造生产线自动脱分箱机械手的设计

1前言机械手是模仿着人手的部分动作, 按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中, 它代替人进行正常的工作, 意义更为重大。
因此, 在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用。
机械手的结构形式开始比较简单, 专用性较强, 仅为某台机床的上下料装置, 是附属于该机床的专用机械手。
随着工业技术的发展, 制成了能够独立的按程序控制实现重复操作, 适用范围比较广的“程序控制通用机械手”, 简称通用机械手。
由于通用机械手能很快的改变工作程序, 适应性较强, 所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
造型机主要解决了造型过程中型砂紧实和起模工序的机械化和自动化的问题。
而要浇注一个铸型除了紧实和起模工序外, 对于有箱造型来说, 还有许多辅助工序, 如翻箱、合箱、压铁、浇注、落砂以及砂箱的运输等。
这些辅助工序如果不实现自动化, 将会大大增加工人的劳动强度和降低生产的效率。
在我国社会主义建设中, 随着机械工业的高速发展, 对铸件的需要量也越来越大, 为了进一步提高生产率, 减轻劳动强度, 改善劳动条件, 提高铸件质量, 组成机械化、自动化生产工具线, 是发展的必然趋势。
近年来, 我国出现了一大批各种形式的机械化、自动化生产线。
国外各种高效率的造型生产线发展迅速, 而且电子计算机技术已经开始应用于自动化造型生产线的控制上。
所谓造型生产线, 就是根据生产铸件的工艺要求, 将主机(造型机)、辅机(翻箱机、合箱机、落箱机、压铁机、脱分箱机等)按照一定的工艺流程, 用运输设备(铸型输送机、辊道等)联系起来, 并采用一定控制方法来组成的机械化、自动化生产线。
造型生产线的种类很多, 它们的结构、布置形式、控制方法都视根据生产工具的实际情况不同而设计的, 但一般都由主机、辅机和运输设备组成。
自动压铸机机械手设计

自动压铸机机械手设计自动压铸机机械手是压铸自动化生产线上的重要组成部分,主要用于自动化地完成压铸产品的取出、清理、送料、调位、喷涂等环节。
因此,机械手的设计将直接影响着自动化生产线的稳定性、效率以及产品质量。
本文将从机械手的设计需求、机械手的种类、机械手的结构特点、机械手的关键技术以及机械手的应用等方面进行阐述。
一、机械手设计需求1. 高安全性:机械手在工作过程中必须保障操作员的人身安全,防止发生意外伤害。
2. 高稳定性:机械手的操作必须精准可靠,避免运动轨迹产生误差,导致产品质量不合格。
3. 高精度性:机械手的操作精度必须达到0.1mm以下,以确保产品尺寸精度和外观。
4. 高自动化程度:机械手应该具备自主控制系统,实现自动化操作过程。
5. 高适应性:机械手应该有良好的适应性,能够适应不同的生产场景,能够完成不同步骤的操作工作。
6. 高效率:机械手应该能够完成高效的操作,提高生产效率,减少生产成本。
二、机械手的种类根据机械手的功能和结构,机械手可以分为以下几类:1. 径向机械手:适用于泥、水、气两用机,主要用于沙铸和石墨模压铸。
2. 立式机械手:适用于冷室压铸机和橡胶压铸机,主要用于对重物处理。
3. 加固机械手:适用于铸造铁和铝制品操作,加固铸造零部件,提高产品质量和机械手的使用寿命。
4. 差速机械手:适用于自动化生产线压铸过程中速度不稳定时的操作。
三、机械手的结构特点1. 机械手的骨架结构:骨架结构是机械手的主要载体,承受机械手中各部件的重量和力,因此骨架结构必须牢固、坚定、能够承受各种机械压力。
2. 机械手的驱动系统:驱动系统是机械手的中心部件,主要由驱动器件、调速器、控制电路及传感器等组成,可以实现机械手的运动控制。
3. 机械手的终端控制系统:终端控制系统是机械手的最后控制部分,是机械手与生产线的关键接口。
它的主要功能是控制机械手的轨迹、力、速度等信息来实现高精度的运动控制。
4. 机械手的操作系统:操作系统是机械手的核心部分,最主要的功能是接收并处理生产指令,根据指令要求完成各项操作工作。
压铸机自动浇铸机械手
摘要本文简要介绍了工业机器人的概念,浇注机械手硬件和软件的组成,机械手各个部件的整体尺寸设计。
本文着重对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转液压缸的驱动力矩。
设计了机械手的手臂结构。
设计出了机械手的液压系统,绘制了机械手液压系统工作原理图,大大提高了绘图效率和图纸质量。
关键词:工业机器人机械手浇注机械手AbstractAt first, the paper introduces the conception of the industrial robot and the Eller. Dairy information of the development briefly. What’s more, the paper accounts for the background and the primary mission of the topic.The paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator,The paper designs the structure of the hand and the equipment of the drive of the manipulator. This paper designs the structure of the wrist, computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.The paper designs the structure of the arm.KEY WORDS:industrial robot manipulator pump air pressure drive第1章绪言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
630吨压铸机自动浇铸机械手,主要由手臂、回转支架、倾倒机构、浇包 (即勺式手部)、倾倒油缸、回转油缸、底座及升降油缸等组成。
手臂为一平行四边形机构,它具有俯仰和回转运动。
手臂俯仰运动是通过铰链支承的升降油缸来达到,使得平行四边形机构的连杆 (它带动浇包)作平面平行运动,即浇包有升降和横移运动。
手臂的回转运动是由回转油缸来实现的。
手臂上安装有弹簧,通过绳索和滑轮与倾倒机构连接,用来使倾倒机构复位,同时也起缓冲作用。
630吨压铸机浇铸机械手备有4、6、8公斤三种容量的浇包,它们的结构相同,只是尺寸有异。
该浇包的特点是底部进料,并有隔板以挡住氧化皮,其容积是定量的。
关键词:机械手、浇铸、压铸。
AbstractManipulator arm to mimic the staff and some motor function, to crawl at a fixed procedure, handling objects or tools of the automatic operation devices. It can replace the heavy labor in order to achieve the production mechanization and automation can be harmful to the environment in the operation to protect the personal safety and therefore widely used in machine building, metallurgy, electronics, light industry and atomic energy sectors.630 tons die casting machine automatically casting manipulator, mainly by the arm, rotating frame, the dumping of bodies, pouring package (that is, spoon-hand), the dumping of the fuel tank, the fuel tank of Rotary, the base and movements composed of the fuel tank.Arm as a parallelogram, it is pitching and turning motion. Pitching arm movement through the hinge supporting the movements to achieve the fuel tank, making the parallelogram linkage (which led poured packet), a parallel campaign plane, a package pouring movements and shifting movement. Arm of the Rotary movement is achieved by rotating the fuel tank.Spring is installed on the arm by a rope and pulley connection with the dumping of bodies, used to dump bodies reduction, but also a buffer role. 630 tons die casting machine casting manipulator with a capacity of three kilograms of 4,6,8 pouring package, the same as their structure, but there are different sizes. The package is characterized by pouring at the bottom of the feed, and a partition wall to block the oxidation skin, its volume is quantitative.KeyWords:Manipulator,Cast, Srike.目录目录 (3)摘要 (1)Abstract (2)第一章绪论 (3)1.1机械手概述 (5)1.1.1执行机构 (6)1.1.2驱动系统 (7)1.1.3控制系统 (8)1.1.4位置检测装置 (8)1.2国内外发展状况 (9)1.3课题的提出及主要任务 (10)1.3.1课题的提出 (10)1.3.2课题的主要任务 (12)第二章机械总体设计 (13)2.1 对630吨压铸机自动浇铸机械手的分析 (13)2.2 机械手的组成与结构 (15)2.2.1腕部 (15)(一)腕部设计的基本要求 (15)(二)倾倒运动驱动力的计算 (16)倾倒液压缸工作压力和结构的确定: (16)2.2.2 臂部和机身 (17)(一)臂部设计的基本要求 (17)(二)臂部运动速度要高,惯性要小 (18)(三)手臂动作应灵活 (19)(四)位置赖度更高 (19)(五)升降运动驱动力的计算 (20)(六)机身回转机构的设计计算 (21)(1)回转缸驱动力矩的计算 (21)2.2.3 轴设计与计算 (24)1.概括: (24)2.轴的常用材料 (25)3.轴的结构设计原则 (25)4.提高轴疲劳强度的结构措施 (25)5.轴的加工和装配工艺性 (26)6.轴的计算 (26)2.2.4轴承设计 (28)1.轴承类型的选择: (28)2.根据当量动载荷计算: (29)2.2.5 键的选择计算 (30)1.键的选择类型、特点: (30)2.键联结的强度计算: (30)第三章液压系统设计 (32)3.1 液压系统的组成和型式 (32)3.2 液压传动与控制的优缺点 (32)3.3 液压系统设计 (32)3.3.1 明确设计要求 (32)3.3.2 总体规划、确定液压执行元件 (33)3.3.3 明确液压执行元件的载荷、速度及其变化规律 (33)3.3.4 确定系统工作压力 (33)3.3.5 草拟液压系统原理图 (33)3.3.6 液压缸的主要性能参数 (34)3.3.7 液压缸主要零件设计 (35)结论 (39)致谢 (40)参考文献 (41)第一章绪论1.1机械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用. 机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
机械手的组成:机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
各系统相互之间的关系如方框图1-1所示。
图1-1机械手的组成1.1.1执行机构包括手部、手腕、手臂和行走机构等运动部件组成。
1、手部即直接与物件接触的部件。
由于抓取物体的形状不同,可分为夹持式和吸附式手部。
夹持式手部由手指和传力机构所构成。
手指是与物件直接接触的构件,常用的手指运动形式有回转型和平移型。
回转型手指结构简单,制造容易,故应用较广泛。
平移型应用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。
手指结构取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及尺寸。
常用的指形有平面的、V形面的和曲面的:手指有外夹式和内撑式;指数有双指式、多指式和双手双指式等。
而传力机构则通过手指产生夹紧力来完成夹放物件的任务。
传力机构型式较多,常用的有:滑槽杠杆式、连杆杠杆式、斜楔杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式等。
吸附式手部是靠吸附力吸附物件,相应的吸附式手部有负压吸盘和电磁盘两类。
对于轻小片状零件、光滑薄板材料等,通常用负压吸盘吸料。
造成负压的方式有气流负压式和真空泵式。
对于导磁性的环类和带孔的盘类零件,以及有网孔状的板料等,通常用电磁吸盘吸料。
电磁吸盘的吸力由直流电磁铁和交流电磁铁产生。
用负压吸盘和电磁吸盘吸料,其吸盘的形状、数量、吸附力大小,根据被吸附的物件形状、尺寸和重量大小而定。
此外,根据特殊需要,手部还有勺式(如浇铸机械手的浇包部分)、托式(如冷挤齿轮机床上下料机械手的手部)等型式。
2、手腕是连接手部和手臂的部件,并可用来调整被抓取物件的方位(即姿势)。
3、手臂手臂是支承被抓物件、手部、手腕的重要部件。