openservo3
第三章 伺服系统

In general ,the Closed-loop system includes Position Loop、 Speed Loop 、 Electric Current Loop. 一般闭环系统为三环结构:位置环、速度环、电流环
• 数控机床伺服系统又称为位置随动系统、驱动系统、伺服机构或伺 服单元。
Servo system is a main subsystem of the numerical control system . If the CNC device is the numerical control system ‘s“brains”, then the servo system is a
计算方法。学习中,应特别注意各种伺服驱动元件的调速
方法和调速原理,了解各种驱动元件之间的性能比较及其 应用场合
• 3.1 Overview 概述
3.1.1 the function of the system 系统功能
The automatic control system which uses position and velocity as control
G
Position Loop、 Speed Loop and Electric Current Loop are made of Regulation control, testing and feedback modules. 位置、速度和电流环均由:调节控制模 块、检测和反馈部分组成。电力电子驱动装置由驱动信号产生电路和功率放大 器组成。 Position control includes position, speed and current control ;Speed control includes the speed and current control.位置控制包括位置、速度和电流控制;速度控制包 括速度和电流控制。
研控科技MS-Mini3E总线型混合伺服驱动器用户手册说明书

目录前言 (4)1概述 (5)1.1产品介绍 (5)1.2特性 (5)1.3应用领域 (5)1.4产品命名规则 (5)2性能指标 (6)2.1 EtherCAT特性 (6)2.2电气特性 (6)2.3使用环境 (6)3安装 (7)3.1安装尺寸 (7)3.2安装方法 (7)4 驱动器端口与接线 (8)4.1接线示意图 (8)4.2端口定义 (8)4.2.1状态指示界面 (8)4.2.2旋钮拨码 (9)4.2.3状态指示灯 (9)4.2.4 EtherCAT通讯端口 (9)4.2.5控制信号输入/输出端口 (10)4.2.6编码器输入端口 (10)4.2.7电机输出端口 (10)4.2.8电源输入端口 (10)4.3输入/输出端口操作 (11)5适配电机 (14)5.1电机尺寸 (14)5.2电机规格 (17)5.3技术参数 (17)5.4电机线规格(仅适用闭环电机) (18)5.5编码器线规格(仅适用闭环电机) (18)5.6电机接线图 (19)6 EtherCAT总线 (22)6.1 EtherCAT技术原理 (22)6.2 EtherCAT数据结构 (22)6.3 EtherCAT报文寻址 (23)6.3.1 设备寻址 (24)6.3.2 逻辑寻址 (25)6.4 EtherCAT分布时钟 (25)6.5 EtherCAT通信模式 (25)6.5.1 Free Run模式 (25)6.5.2 SM2/3模式 (26)6.5.3 DC模式 (26)6.6 EtherCAT状态机 (27)6.7 应用层协议COE (27)6.7.1 COE对象字典 (28)6.7.2 服务数据对象(SDO) (28)6.7.3 过程数据对象(PDO) (28)7驱动器控制协议CiA 402 (29)7.1 CIA402状态机 (29)7.2 工作模式 (30)7.3循环同步位置模式(CSP) (31)7.4 循环同步速度模式(CSV)........................................................ 错误!未定义书签。
ocs-3标准
ocs-3标准OCS-3(Open Core System 3)标准是一种开放式核心系统标准,旨在为物联网(IoT)设备提供统一的硬件和软件架构。
该标准由Open Connectivity Foundation(OCF)组织制定,旨在促进物联网设备的互操作性和互通性。
OCS-3标准的核心思想是将物联网设备的硬件和软件分离,以实现设备的模块化和可扩展性。
该标准定义了一套通用的硬件和软件接口规范,使得不同的厂商可以根据这些规范来开发兼容的物联网设备。
这有助于降低设备之间的互通难度,提高物联网应用的开发效率。
OCS-3标准主要包含以下几个部分:1.硬件抽象层(HAL):定义了物联网设备硬件的通用接口规范,包括电源管理、时钟管理、中断管理、外设接口等。
2.操作系统抽象层(OSAL):定义了物联网设备操作系统的通用接口规范,包括任务管理、消息队列、信号量、互斥量等。
3.应用框架:提供了一套可扩展的应用程序接口(API),使得开发者可以基于OCS-3标准开发各种物联网应用。
4.云服务接口:定义了物联网设备与云服务平台之间的通信协议,包括数据传输、远程控制、设备管理等。
OCS-3标准的优势在于其开放性和可扩展性,使得不同厂商的物联网设备可以方便地实现互操作和互通。
这有助于降低物联网应用的开发成本,加速物联网技术的推广和应用。
同时,OCS-3标准还在不断完善中,以适应物联网技术的不断发展。
OCS-3标准的特点主要包括以下几个方面:1.开放性和标准化:OCS-3标准是由Open Connectivity Foundation(OCF)组织制定的,是一个开放和标准化的规范,旨在促进物联网设备的互操作性和互通性。
2.硬件和软件分离:OCS-3标准的核心思想是将物联网设备的硬件和软件分离,以实现设备的模块化和可扩展性。
这种分离的设计有助于降低设备之间的互通难度,提高物联网应用的开发效率。
3.可扩展性:OCS-3标准定义了一套可扩展的应用程序接口(API),使得开发者可以基于OCS-3标准开发各种物联网应用。
SERVO-U 手册说明书

SERVO-U– hands-on guideThis document is intended to provide information to an international audience outside of the US.IntroductionThere are different ways to navigate the user interface, adjust settings and get support.TapTap andholdScroll verticallyor horizontallyDrag and dropConfirm the settings by tapping Accept or the green check mark.Exit settings without changing by tapping cancel or the red x.Close by tapping the green x.The objective with this SERVO-U ®hands-on guide is to guide you through some of the most important steps you need to familiarize yourself with when starting to use the SERVO-U ventilator. Please see the User Manual for more information.To go through these exercises you need a SERVO-U 2.1, O 2 and air supply, patientcircuit and a test lung. The exercises can be done individually or in sections. It takes approximately 30 minutes to do the entire SERVO-U hands-on guide. Know-ledge Check questions with answers can be found at the end of the guide. NOTE: Some modes are options and might not be included.9–111 2 32Setting up the SERVO-UFollow step by step (see corresponding images and notes):1.Plug in the power cord.2. Open the hatch on the side and switchthe ventilator to on.NOTE: When switching on the SERVO-U, you need to pull the ON/OFF switch downwards.3. Connect the air and oxygen hoses.4. Lock the wheels. It’s important to lock the wheelswhen the ventilator is in use to avoid accidental movement of the ventilator.5. Start the PRE-USE CHECK .(You need the test tube during the Pre-Use Check). 6. Follow the instructions on the screen.7. Included in the Pre-Use Check is the patient circuittest. Connect the patient circuit.8. Connect a test lung to the patient circuit.NOTE: Pre-Use Check includes pressure and flow transducers calibration. Each test startsautomatically after the previous test is completed. The patient circuit test is included in the Pre-Use Check, but can be selected separately.9. Choose patient category: ADULT . (1) 10. Choose Ventilation type: INVASIVE . (2)(You can also choose NON INVASIVE here).11. Tap on Ventilation mode PRVC . (3)(Depending on start up the configuration a different mode can be shown here.)NOTE: Some modes are options and might not be included. Information is available for each mode.12. Then tap and hold the PRVC tile. (4)13. Close by tapping.12416–1914. Select Mode by tapping PRVC .15. Change the:-Tidal volume to 350ml -Respiratory rate to 18b/min -Peep to 10cm H 2O16. ACCEPT the mode settings. (1)17. Go to ALARM LIMITS in QUICK MENU . (2)18. Change the alarm limits:-Alarm sound: 6-Ppeak: 30cm H 2O-RR (Respiration Rate): High 12b/min -Mve (Minute volume): Low 8.0L/min 19. ACCEPT the alarm settings. (3)20. Tap START VENTILATION .14–15721–23456Alarms21. The alarms are turned off for 30 seconds afterstarting ventilation. (4)NOTE: Alarms can be in one of three colours: red, yellow or blue, depending on priority.22. Tap the activated alarm in message bar (5) and readthe messages.NOTE: The number of alarms that are active are displayed in the status bar at. (6)23. Tap the red tile in the numerical values MVe alarm. (7)NOTE: By tapping the activated alarm in thenumerical values field, you gain access to the alarm setting (shortcut).13226 Note124. Go to alarm limits. Adjust the alarms so none areactive.NOTE: The arrow indicates the current measured value. (1)25. Activate the AUTOSET function by tapping. (2)NOTE: The alarm autoset function can only be used in controlled modes.26. Tap the placed next to Ppeak alarm setting. (3)You can find more information about the alarm setting there.NOTE: The information sign can be found in different positions on the Graphic User Interface.27. ACCEPT the alarm settings.NOTE: When ventilating, you can see that the patient circuit test has been performed by the symbol - The symbol will not appear if a patient test has not been done. (4)28. Decrease the PEEP to 4 cm H 2O (use the direct accesskeys) and increase the scale by tapping the . (5) Then increase the PEEP to 26 cm H 2O. Cancel the settings by tapping the .NOTE: The color changes when the settings arechanged outside the normal range.24–26324275VT/PBW1229. Tap PBW or the VT/PBW to open PATIENT DATA. (1)30. Enter gender FEMALE .31. Enter HEIGHT 160 cm.32. Enter WEIGHT 75kg.NOTE: The predicted body weight is often not the same as the patient’s actual weight (in Neonatal and Pediatric patient categories the actual weight is entered).33. Check the ml/kg setting. (2)34. Go to the direct access bar and change the TIDALVOLUME so you receive 6ml/kg. (3)3354Mode setting35. Tap the mode PRVC and open the mode setting. (4)129–33343924536. Change the TRIGGER value to pressure triggering-1 cm H 20.NOTE: Read the text by the scaling. Less patient effect and more patient effect. (1)37. Change the I:E (or Ti if this is configured.)NOTE: The changes of the dynamic images. 38. CANCEL changes.39. Make a quick change of O 2 to 100%. Change the O 2setting in the direct access bar to 100% by tapping on the 100% directly on the sliding scale. (2)40. CANCEL the changes by tapping the .41. Tap MODES in the QUICK MENU andchoose PS/CPAP.42. Change the END INSPIRATION to 40 % and thento 60%. Look at how the dynamic image changes.43. ACCEPT 60%.44. ACCEPT PS/CPAP mode.45. Compress the test lung to trigger breaths.NOTE: The white indicates the triggering in the waveforms, depending on how the trigger is set (pressure or flow) the colour indication changes - if pressure triggering is set- white indication in pressure waveform. If flow triggering is set- white indication in flow waveform. Also there is a lung on the screen indicating the triggered breath.146. Stop compressing the test lung.NOTE: The colour changes to bold white for PC and the BACKUP settings. The mode and settings that are not active are grey. (1)47. Tap the in the direct access bar (2), you then haveaccess to all the mode settings directly.48. Go to MODES and change back to PRVC .NOTE: It is marked previous. (3)49.Accept previous settings.1246–4750. Go to VIEWS in QUICK MENU . (4)Change to BASIC view.51. Use the to find additional values. (5)52. Go through the different views; DISTANCE, FAMILY,LOOPS and SERVO COMPASS ®view.Views5045481335153–5453. If SERVO COMPASS view is available, tap on theSERVO COMPASS .NOTE: You can choose the target for ml/kg and Driving or total pressure. 54. Compress the testlung.NOTE: The pressure symbol turns red.55. Change back to ADVANCED view.56. Go to SCREEN LAYOUT.NOTE: Here can the SERVO COMPASS be switched on/off (option). (1)57. Change to filled waveforms by tapping thewaveform image. (2)58. Change back to non-filled waveforms.56–581259. Tap the RECORDER once and tap the CAMERA in thestatus bar three times. (1)NOTE: A 30 second recording will be made starting 15 seconds before and lasting until 15 seconds after the recording is initiated.60. Choose (2) to access MEDIA . Navigate between thedifferent screenshots and the recording.NOTE: Screenshots are displayed at the bottom of the window.61. Find the USB port by flipping the screen.NOTE: You can use a USB memory stick to export the data (e.g. screenshots).Media159–6063NAVA & NIV NAVA62. Go to NAVA in QUICK MENU . (3)63. Find the workflow of NAVA/NIV NAVA under the .64. Go to CALCULATION TOOL .65. Chose 16FR EDI CATHETER .66. Chose NASAL insertion.67. Enter NEX 52 cm.68. Edi catheter insertion distance is presented.NOTE: The insertion distance calculation often needs to be titrated using the ECG.69. Go to EDI CATHETER POSITIONING .364–69270. Tap the .NOTE: The yellow curve is the pressure waveform and the grey curve is the pressure estimated for NAVA.71. Close by tapping the.72. Go to NAVA MODE and tap.NOTE: The mode is divided in NAVA and PC(backup mode).7072Grey Curve Yellow Curve73–78273. Go to DISCONNECT/SUCTION in QUICK MENU . (1)74. Change the O 2 CONCENTRATION to 40%. (2)75. Accept DISCONNECT/SUCTION function.76. Disconnect the test lung.77. Reconnect the test lung.78. CANCEL post-oxygenation.NOTE: When disconnection/suction is activated the ventilator system is prevented from cycling without activating alarms.Disconnect/Suction179. Go to MANEUVERS in QUICK MENU . (1)80. Activate MANUAL BREATH by tapping.81. Go to STATIC MEASUREMENT.82. Tap INSPIRATORY HOLD and hold for 4 seconds,and then EXPIRATORY HOLD for 4 seconds. (2)83. Observe the PEEPtot value.NOTE: PEEPtot value is the set PEEP + intrinsic PEEP.84. Go to NEBULIZATION .NOTE: You can choose continuous nebulizationor a nebulization period . The timefor nebulization can be changed. When nebulization is activated there will be the correspondingnebulization symbol on the screen. By tapping the symbol you can stop nebulization.Maneuvers7981–828412Battery85. Unplug the mains cable.86. Click on the battery symbol. (1)NOTE: You can see how much capacity remains for each battery.Lock screen87. LOCK the screen is found in Quick Menu,Lock screen.88. Tap anywhere on the screen and see what happens.89. UNLOCK the screen by tapping on theLocking Symbol.O 2 boost90. Activate O 2 BOOST by tap and hold. (2)NOTE: O 2 boost is active for one minute.91. CANCEL O 2 boost by tapping.92. Go to MANEUVERS and select O 2 BOOST . Unlock the100% O 2 boost by tapping the 100% lock symbol. 93. Observe the new O 2 BOOST level. Change the O2BOOST LEVEL to 40% and accept.8690–938712Trends94. Go to TRENDS in the EXTENDED MENU . (1)95. Change the trend scale to 1 hour. (2)96. Drag the cursor and note that each event/changeshave been trended.97. Tap ORGANIZE to change the order of the trends. (3)Note: Trend values are stored every 60 seconds and retained for a maximum of 72 hours.98. Put the RR sp, RR at the top by dragging and droppingTRENDS .Note: You can see the trend of VT/PBW and driving pressure.99. Close the window by tapping .100. T ap MODES .NOTE: You can go directly to HFT withoutgoing to Standby.132Stop ventilation101. Tap STANDBY in QUICK MENU and then tap and holdSTOP VENTILATION .NOTE: If Edi is connected it is possible to go directlyto Edi Monitoring in standby.9495–96101Knowledge check 1. Why is it important to have the same patient circuitthat will be used for the patient when performing thepatient circuit test?2. Which priority level does the red alarm have? HIGH,MEDIUM or LOW priority?3. Can autoset of alarm settings be used insupported modes?4. Is pressure Triggering of -1 easier or more difficultthan Flow triggering of 1.6 l/min. (for the patient totrigger the breath)?5. Is the end inspiration of 40% expiration longeror shorter than 60%? Look at the dynamic imageand text.6. How can you see on the screen that thepatient is triggering?© M a q u e t C r i t i c a l C a r e A B 2017 · S e r v o -u i s a t r a d e m a r k o f M A Q U E T C r i t i c a l C a r e A B · M X -6022 R e v 07 · E n g l i s hThis document is intended to provide information to an international audience outside of the US. Servo-u may be pending regulatory approvals to be marketed in your country. Contact your Getinge representative for more information.Getinge is a leading global provider of innovative solutions for operating rooms, intensive-care units, hospital wards, sterilization departments and for life science companies and institutions. Based on first-hand experience and closepartnerships, Getinge offers innovative healthcare solutions that improve every-day life for people, today and tomorrow. Manufacturer · Maquet Critical Care AB · Röntgenvägen 2 SE-171 54 Solna · Sweden · +46 (0)10 335 73 00Answers1.I f t h e c o r r e c t c i r c u i t i s n o t t e s t e d , t h e f o l l o w i n gr i s k s m a y a r i s e :• I n v o l u m e -b a s e d m o d e s , t h e v o l u m e d e l i v e r e d t ot h e p a t i e n t w i l l b e i n c o r r e c t .• I n p r e s s u r e -b a s e d m o d e s , t h e v o l u m e m e a s u r e dw i l l b e i n c o r r e c t .2. R e d – H i g h P r i o r i t y a l a r m s . Y e l l o w – M e d i u m p r i o r i t ya l a r m s . B l u e – L o w p r i o r i t y a l a r m s .3. A u t o s e t i s n o t a v a i l ab l e i n s u p p o r t e d o r N I V m o d e s o r i n S T A N D B Y b ec a u s e t h e v e n t i l a t o r s y s t e m r e q u i r e sp a t i e n t v a l u e s i n o r d e r t o p r o p o s e a l a r m l i m i t s .4. F l o w t r i g g e r i n g o f 1.6l /m i n i s e a s i e r t o t r i g g e r t h eb r e a t h t h a n p r e s s u r e t r i g g e r i n g o f -1.5. E n d i n s p i r a t i o n o f 40% g i v e s a l o n g e r i n s p i r a t i o nt h a n 60%.6. T h e r e i s a l u n g o n t h e s c r e e n i n d i c a t i n g t h e t r i g g e r e d b r e a t h . A l s o t h e r e i s a w h i t e i n d i c a t i o n i n t h e w a v e -f o r m s . (i f p r e s s u r e t r i g g e r i n g i s s e t - w h i t e i n d i c a t i o n i n p r e s s u r e w a v e f o r m a n d i f F l o w t r i g g e r i n g i s s e t - w h i t ei n d i c a t i o n i n fl o w c u r v e ).。
Step Servo Quick Tuner 用户手册 中文 pdf

V1.1
©版权所有 上海安浦鸣志自动化设备有限公司
Step-Servo Quick Tuner 软件手册
1 版本历史
版本
作者
1.0
Austin
Байду номын сангаас
1.1
Jay
参与者
Frank, Jimmy
日期
更改内容
2013-7-19 首次发布
2014-12-31 增加 Step-Servo Quick Tuner 3.0 的新特性
qsg格式从驱动器上传从驱动器上传q程序下载到驱动器将当前q程序下载到驱动器清除q程序清除q程序内容设置密码设置q程序密码打印q程序打印q程序连接尝试连接驱动器pingping以太网通讯型的驱动器ip地址表编辑以太网通讯型的驱动器的ip地址表选项设置报警屏蔽反电势通讯及其它参数恢复出厂设置将参数恢复到出厂默认配置报警历史查看报警历史记录工具固件下载升级驱动器的固件运动轨迹计算器根据目标距离加减速等参数模拟运动曲线stepservoquicktuner软件手册10导出canopen将canopen参数导出到磁盘文件中canopentesttool打开canopentesttool软件如果已安装语言english将软件界面切换至英文中文将软件界面切换至中文帮助查看帮助内容411工程stepservoquicktuner软件提供将您当前连接的驱动器中的配置及q程序等作为一个工程文件保存到本地磁盘也可以将原来保存在电脑中的工程文件显示到软件上或者将工程文件直接打印出来等功能
2
2 目录
Step-Servo Quick Tuner 软件手册
1 版本历史 ........................................................................................................................ 2 2 目录................................................................................................................................ 3 3 Step-Servo Quick Tuner 软件介绍 ............................................................................... 6
c3 介绍

全球运动控制领域的领导品牌
2014-9-18
本文档介绍的内容:
• 列出了 Compax3 驱动器系列的电压电流 规格。 • 简单描述了 T10, T11 和T30/T40的区别. • IEC61131-3编程的优点. • ServoManager 软件的作用和特点.
Compax3 – 特点
• 提供 通常的运动/驱动功能块 (包含在库文件里)
• CoDeSys IEC61131-3 程序编辑器 • 对准点输入 (0.6 µ s) • 扭矩控制模式 (可以从位置控制模式切换到扭矩控 制模式)
Compax3 - T30特点
为什么用 IEC61131?
• 模组化 – 程序用系统包含的一些小功能块组 织; 能创建库文件重复利用 •它用定义的那5种语言去统一编程 • 这些语言覆盖了当代所有主要的控制器语言 ,这意味着总能为您的任务找到合适的语言 • 产品就像一个PLC:输入, 代码, 输出 Function Block Diagram (FBD)
数据类型 (BOOL, REAL, INT, DINT, WORD, TIME) 典型 IEC 命令: ABS, MIN, MAX, MOVE, LIMIT, SET, SIN, COS, SQRT
Compax3 - T30 特点
Compax3 "T30"
• 用 IEC61131-3 编程的驱动/控制器 • 五种编程语言 •指令表 Instruction List (IL) •结构图 Structured Text (ST) •功能块图 Function Block (FB) •顺序功能图 Graphical Function Block (CFC) •梯形图 Ladder Diagram (LD)
openvins讲解

OpenVINS(Open Visual-Inertial Navigation System)是一个OpenVINS(Open Visual-Inertial Navigation System)是一个开源的视觉惯性导航系统,它结合了视觉传感器和惯性测量单元(IMU)的数据,以实现更准确的机器人定位和导航。
OpenVINS主要由以下几部分组成:
1. 传感器数据预处理:这部分负责从视觉传感器和IMU中获取原始数据,并将其转换为可用于后续计算的格式。
这包括对图像进行特征提取、相机标定、IMU数据去噪等操作。
2. 优化器:这部分负责根据传感器数据估计系统的位姿和速度。
优化器使用滤波器(如卡尔曼滤波器或粒子滤波器)来处理数据,并通过最小化预测值与实际观测值之间的误差来更新系统的状态。
3. 后端:这部分负责将优化后的位姿和速度信息转换为可用于机器人控制的命令。
这可能包括运动计划、轨迹生成、碰撞检测等功能。
4. 可视化:这部分负责将优化后的位姿和速度信息以图形的形式展示出来,以便用户更好地理解系统的性能。
OpenVINS支持多种类型的视觉传感器和IMU设备,并提供了丰富的功能和接口,使得开发者可以轻松地将其集成到自己的机器人系统中。
此外,OpenVINS还具有很好的扩展性,可以根据需要添加新的功能和算法。
OPEN-3000系统使用手册-平台new
OPEN-3000 系统使用手册——平台
2.5 操作工具.............................................................. 13 2.5.1 文件操作工具...................................................... 13 2.5.2 窗口操作工具...................................................... 15 2.5.3 画面编辑工具...................................................... 15 2.5.4 绘图参数工具...................................................... 18 2.5.5 位置工具.......................................................... 20 2.5.6 图元仓库工具...................................................... 22 2.5.7 图形属性工具...................................................... 23
第二章 图元编辑器............................................................ 8 2.1 概述................................................................... 8 2.2 启动及退出............................................................. 8 2.3 界面总览............................................................... 9 2.3.1 标题区............................................................. 9 2.3.2 菜单/工具栏........................................................ 9 2.3.3 作图区............................................................ 10 2.3.4 属性编辑框........................................................ 10 2.3.5 导航区............................................................ 11 2.3.6 坐标栏............................................................ 11 2.4 图元的分类............................................................ 11 2.4.1 普通图元.......................................................... 11 2.4.2 特殊图元.......................................................... 13
SS步进伺服分体式运动控制器说明书

Compliant■ 智能型,内藏运动控制器 ■ 总线控制,多轴网络通讯 ■ 加强型电机,长寿命设计 ■ 高效率,高精度,高响应 ■ 低振动,低噪音,低发热SSS tep -S ervoNew步进伺服第三代步进伺服闭环步进(20000 counts/rev)全闭环MOONS 创新性地将伺服控制技术融入步进电机之中,创造出具有全新优异性能表现的分体式运动控制终端。
运动指令反馈全闭闭环全闭环速度力矩位置运动模拟量速度ID 1ID 2ID n 多轴网络RS-485Downloading运动编程能量输出80%发热损耗energy能量输出30%发热损耗energyStepper SS产品内置20000 脉冲定位误差仅为1脉冲(0.018圈高分辨率编码器,提供了准确的位置精 基于5000线高精度编码器的空间矢量电流控制算法,在全速度范围内均有优异的性能表现,即使在低速应用时仍可保持平稳、安静的运行。
------解决传统步进电机低速振动噪声问题利用高速响应的伺服控制技术升级强化了步进电机固有的刚性特质。
------在运行和静止时都确保定位的精确简单参数整定高速响应大力矩运动检测关键特性速度距离负载惯量1:10 1:5 1:1使用预定义的整定参数即可获得最优的性能表现及系统稳定性。
根据不同等级的控制要求,提供多种整定参数选择。
对于绝大多数应用场合,默认参数即可满足使用,无需手工整定。
对某些实时性运动有苛刻精确性要求的应用场合,Step-Servo Quick Tuner 提供了一个简单实用的工具用来监测实际运动轨迹。
可用来监测诸如实际速度和位置误差等常用指标,以此评估系统当前实际性 能表现。
交互式监控与整定结合的界面可以最快地获得优化的性能输出。
SS 始终在全伺服模式下运行,电机的力矩可以被100%充分利用,系统设计时无需考虑力矩冗余。
在大多数应用场合,电机可以输出150%的额定力矩,大力矩输出在某些情况下可以简化减速机构的复杂度。
ES变频器调试说明
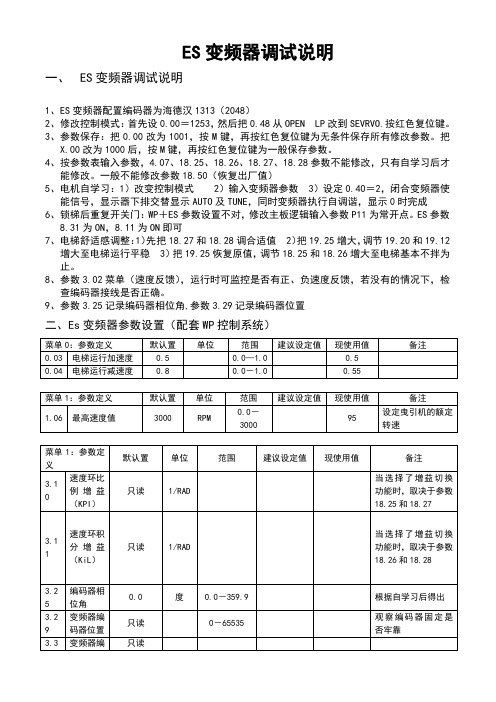
ES变频器调试说明一、ES变频器调试说明1、ES变频器配置编码器为海德汉1313(2048)2、修改控制模式:首先设0.00=1253,然后把0.48从OPEN LP改到SEVRVO.按红色复位键。
3、参数保存:把0.00改为1001,按M键,再按红色复位键为无条件保存所有修改参数。
把X.00改为1000后,按M键,再按红色复位键为一般保存参数。
4、按参数表输入参数,4.07、18.25、18.26、18.27、18.28参数不能修改,只有自学习后才能修改。
一般不能修改参数18.50(恢复出厂值)5、电机自学习:1)改变控制模式 2)输入变频器参数 3)设定0.40=2,闭合变频器使能信号,显示器下排交替显示AUTO及TUNE,同时变频器执行自调谐,显示0时完成6、锁梯后重复开关门:WP+ES参数设置不对,修改主板逻辑输入参数P11为常开点。
ES参数8.31为ON,8.11为ON即可7、电梯舒适感调整:1)先把18.27和18.28调合适值 2)把19.25增大,调节19.20和19.12增大至电梯运行平稳 3)把19.25恢复原值,调节18.25和18.26增大至电梯基本不拌为止。
8、参数3.02菜单(速度反馈),运行时可监控是否有正、负速度反馈,若没有的情况下,检查编码器接线是否正确。
9、参数3.25记录编码器相位角,参数3.29记录编码器位置二、Es变频器参数设置(配套WP控制系统)菜单0:参数定义默认置单位范围建议设定值现使用值备注0.03 电梯运行加速度0.5 0.0—1.0 0.50.04 电梯运行减速度0.8 0.0-1.0 0.55菜单1:参数定义默认置单位范围建议设定值现使用值备注1.06 最高速度值3000 RPM 0.0-300095设定曳引机的额定转速菜单1:参数定义默认置单位范围建议设定值现使用值备注3.1 0 速度环比例增益(KPI)只读1/RAD当选择了增益切换功能时,取决于参数18.25和18.273.1 1 速度环积分增益(KiL)只读1/RAD当选择了增益切换功能时,取决于参数18.26和18.283.2 5 编码器相位角0.0 度0.0-359.9 根据自学习后得出3.2 9 变频器编码器位置只读0-65535观察编码器固定是否牢靠3.3变频器编只读0 码器精确位置3.3 3 变频器编码器转位16 位0-16 0 03.3 4 变频器编码器每转线数4096脉冲/圈2-5000 2048 2048EnDat1311-2048编码器3.3 5 变频器编码器单转通讯分辨率0 位0-32 13 133.3 6 变频器编码器电源5V(0)伏 5.8.15.(伏)5V (0)3.3 7 编码器波特率300 ms 300EnDat1311-2048编码器3.3 8 变频器编码器类型Ab.Servo(3)Ab(0)、Fd(1)、Fr(2)、Ab.Servo(3)Fd.servo(4)、Fr.servo(5)、SC(6)、Sc.HiPer(7)、EndAt(8)、SC.EndAT(9)Ssi(10)SC.EndAT(9)SC.EndAT(9)EnDat1311-2048编码器3.4 0 变频器编码错误检测级别1 位0-2 0 00.断线检测1.错误相位角检测2.SSI编码器电源检测3.4 1 变频器编码器自动配置/SSI二进制格式选择OFF 位OFF/ON ON ON3.4 2 变频器编码器滤波器0 ms0(0)、1(1)、2(2)、4(3)8(4)、16(5)菜单4:参数定义默认置单位范围建议设定值现使用值备注4.07 对称电流极限值175.0 %≥175.0 210自学习后更改(调大)增加起动力矩电梯打滑4.12 电流给0 ms 0.0-25.0 2-6 2 减少马达噪音定值滤波器1增益4.13 电流控制器Kp增益150 0-30000 自学习后得出4.14 电流控制器Ki增益2000 0-30000 自学习后得出4.15 热时间常数20.0 0-400.0 >60 89 热过载保护时间4.23 电流给定滤波器20.0 ms 0.0-25.0 ≥2 20 启动调节菜单5:参数定义默认置单位范围建议设定值现使用值备注5.07 电机额定电流变频器额定电流安培0-电机额定电流电机额定电流(铭牌)5.08 额定负载时额定速度3000.0 rpm 0.0-3000电机额定转速(铭牌)5.11 电机极数 6 Poles 0-120 电机极数(铭牌)5.17 定子电阻0.0 欧姆0-30 自学后得出5.18 最大载波频率6 Khz3.4.6.8.12.16.6-16 6大时干扰大,小时干扰小5.24 瞬态电感0.000 mH 0.0-5000 ≥8 20 自学后得出菜单7参数定义默认置单位范围建议设定值现使用值备注7.10 T5:多段速选择位3输入目的地址18.39 0.0-21.51 18.38 18.38 速度选择位3菜单8:参数定义默认置单位范围建议设定值现使用值备注8.11 T24:端子输出取反OFF ON ON8.21 T24:端子制动输出源地址18.32 0.0-21.51 18.31 18.31抱闸控制输出8.22 T25:端子电机挡触器控制输出源地址18.31 0.0-21.51 18.31 18.31速度阀值输出8.23 T26:多段速选择位2输入目的地址18.37 0.0-21.51 18.37 18.37速度选择位28.24 T27端子上行输入目的地址18.38 0.0-21.51 19.44 19.44 上行8.25 T28端子下行输入目的地址18.44 0.0-21.51 18.44 18.44 下行8.26 T29多段速选择位1输入目的地址18.36 0.0-21.51 18.36 18.36速度选择位18.27 T41、42继电器输出源地址10.1 0.0-21.51 10.1 10.1变频器输出正常8.29 正逻辑输入选择ON 状态OFF/ON ON ON ON:正逻辑OFF:负逻辑菜单18:参数定义默认置单位范围建议设定值现使用值备注18.11停电应急速度设定50 mm/s 0-4000 100 10018.13爬行速度设定800 mm/s 0-4000 50-80 5018.14检修速度设定100 mm/s 0-4000 200-250 20018.16单层速度设定800 mm/s 0-4000 50-80 80018.17额定速度设定100 mm/s 0-4000 电梯额定速度18.21提前开门速度阀值500 mm/s 0-32767 100-200 20018.24制动器闭合延时500 ms 0-2000 500-1500 120018.25运行比例增益100 0-32000 2750 自学习后更改18.26运行积分增益100 0-32000 400-1200 620 自学习后更改18.27启动比例增益200 0-32000 20000 自学习后更改18.28运行积分增益200 0-32000 5000 自学习后更改18.29额定电梯转速3000 rpm 0-10000 电机额定转速18.3额定电梯速度800 mm/s 0-4000 电梯额定速度18.4 5 方向取反OFF Bit ON/OFF OFF ON 操作方向与实际相反时设定18.5出厂设定OFF Bit ON/OFF OFF OFF 恢复出厂值菜单19:参数定义默认置单位范围建议设定值现使用值备注19.1 1 增益转换时间500 ms 0-3200 300-1000 450 与参数19.25相配合19.1停车减速率1000 mm/s2 0-2000 120 可调平层319.14启动加加速度500 mm/s3 0-10000 120-300 15019.16停车加加速度800 mm/s3 0-4000 50-80 7019.17启动优化加加速10 mm/s3 0-10000 1-10 219.1 8 最大距离差值200 mm 0-10000 0 0 取消距离偏差保护19.2 4 最大速度差200 mm 0-10000 0 0 取消速度偏差保护19.2 5 制动器打开延时1000 ms 0-10000 300-1000 350 与参数19.11相配合19.2 6 运行方向输入编程0 0/1 1 1 选择两个端子控制电梯运行方向19.27减速比分母 1 0-3200 1 119.28启动优化时间300 ms 0-10000 100-3000 20019.2 9 绞盘直径480 mm 0-32000 与实际使用的绞盘直径匹配19.3减速比分子31 0-32000 1 1菜单20:参数定义默认置单位范围建议设定值现使用值备注20.1 0 钢丝绳绕法 1 1-4 0 依照实际使用值设定20.1 2 爬行速度选择0 3 3 依照爬行速度的速度段设定菜单16:参数定义默认置单位范围建议设定值现使用值备注16.1 7 故障检测等级 1 0-2 0 0 位0:断线检测位1:相位角错误检测位2:SSI编码器电源监测16.2 4 编码器信号分频输出源参数0.00 0.00--21.513.29 3.2916.2 5 编码器分步输出系数分子0.25 0.2048 0.2048 0.XXXX即为需要设定的编码器的脉冲数16.2 6 编码器分频输出系数分母1.00 1.6384 1.6384 变频器一圈的位置值16.2 8 编码器分频输出模式Ab Ab(0)Fd(1)Ab.L Ab.LSSI.Gray(2) SSI.Bin(3) Ab.L(4) Fd.L(5) H-drv(6) H-int(7)。
AC Servo Motor Driver (网络卡类型) 产品说明书

Doc no. LEC*-OMY0102-BNN32462502PRODUCT NAMEAC Servo Motor Driver (Network card type)MODEL/ SeriesLECSN-T□SeriesLECSN2-T□ Series / Driver1. Safety InstructionsThese safety instructions are intended to prevent hazardous situations and/or equipment damage.These instructions indicate the level of potential hazard with the labels of “Caution,” “Warning” or “Danger.”They are all important notes for safety and must be followed in addition to International Standards (ISO/IEC),*1) and other safety regulations.*1) ISO 4414: Pneumatic fluid power -- General rules relating to systemsISO 4413: Hydraulic fluid power -- General rules relating to systemsIEC 60204-1: Safety of machinery -- Electrical equipment of machines (Part 1: General requirements)ISO 10218: Manipulating industrial robots -- Safety.Caution Caution indicates a hazard with a low level of risk which, if not avoided, could result in minor or moderate injury.Warning Warning indicates a hazard with a medium level of risk which, if not avoided, could result in death or serious injury.Danger Danger indicates a hazard with a high level of risk which, if not avoided, will result in death or serious injury.Warning1. The compatibility of the product is the responsibility of the person who designs the equipment or decides its specifications.Since the product specified here is used under various operating conditions, its compatibility with specific equipment must be decided by the person who designs the equipment or decides its specifications based on necessary analysis and test results.The expected performance and safety assurance of the equipment will be the responsibility of the person who has determined its compatibility with the product.This person should also continuously review all specifications of the product referring to its latest catalog information, with a view to giving due consideration to any possibility of equipment failure when configuring the equipment.2. Only personnel with appropriate training should operate machinery and equipment.The product specified here may become unsafe if handled incorrectly.The assembly, operation and maintenance of machines or equipment including our products must be performed by an operator who is appropriately trained and experienced.3. Do not service or attempt to remove product and machinery/equipment until safety is confirmed.The inspection and maintenance of machinery/equipment should only be performed after measures to prevent falling or runaway of the driven objects have been confirmed.When the product is to be removed, confirm that the safety measures as mentioned above are implemented and the power from any appropriate source is cut, and read and understand the specific product precautionsof all relevant products carefully.Before machinery/equipment is restarted, take measures to prevent unexpected operation and malfunction.4. Contact SMC beforehand and take special consideration of safety measures if the product is to be used in any of the following conditions.1) Conditions and environments outside of the given specifications, or use outdoors or in a place exposed todirect sunlight.2) Installation on equipment in conjunction with atomic energy, railways, air navigation, space, shipping,vehicles, military, medical treatment, combustion and recreation, or equipment in contact with food and beverages, emergency stop circuits, clutch and brake circuits in press applications, safety equipment or other applications unsuitable for the standard specifications described in the product catalog.3) An application which could have negative effects on people, property, or animals requiring special safetyanalysis.4) Use in an interlock circuit, which requires the provision of double interlock for possible failure by using amechanical protective function, and periodical checks to confirm proper operation.Note that the CAUTION level may lead to a serious consequence according to conditions. Please follow the instructions of both levels because they are important to personnel safety.What must not be done and what must be done are indicated by the following diagrammatic symbols.In this Instruction Manual, instructions at a lower level than the above, instructions for other functions, and so on are classified into "POINT".After reading this installation guide, always keep it accessible to the operator.LECSN2-T□ Series / Driver1. Safety InstructionsCautionThe product is provided for use in manufacturing industries.The product herein described is basically provided for peaceful use in manufacturing industries.If considering using the product in other industries, consult SMC beforehand and exchange specifications or a contract if necessary.If anything is unclear, contact your nearest sales branch.Limited warranty and Disclaimer/Compliance RequirementsThe product used is subject to the following “Limited warranty and Disclaimer” and “Compliance Requirements”.Read and accept them before using the product.Limited warranty and DisclaimerThe warranty period of the product is 1 year in service or 1.5 years after the product is delivered, whichever is first.*3)Also, the product may have specified durability, running distance or replacement parts. Please consult your nearest sales branch.For any failure or damage reported within the warranty period which is clearly our responsibility, a replacement product or necessary parts will be provided.This limited warranty applies only to our product independently, and not to any other damage incurred due to the failure of the product.Prior to using SMC products, please read and understand the warranty terms and disclaimers noted in the specified catalog for the particular products.*3) Vacuum pads are excluded from this 1 year warranty.A vacuum pad is a consumable part, so it is warranted for a year after it is delivered.Also, even within the warranty period, the wear of a product due to the use of the vacuum pador failure due to the deterioration of rubber material are not covered by the limited warranty.Compliance RequirementsWhen the product is exported, strictly follow the laws required by the Ministry of Economy, Trade and Industry (Foreign Exchange and Foreign Trade Control Law).1. To prevent electric shock, note the followingWARNINGBefore wiring and inspections, turn off the power and wait for 15 minutes or more until the charge lamp turns off. Then, confirm that the voltage between P+ and N- is safe with a voltage tester and others.Otherwise, an electric shock may occur. In addition, when confirming whether the charge lamp is off or not, always confirm it from the front of the driver.Ground the driver and servo motor securely.Any person who is involved in wiring and inspection should be fully competent to do the work.Do not attempt to wire the driver and servo motor until they have been installed. Otherwise, it may cause an electric shock.Do not operate switches with wet hands. Otherwise, it may cause an electric shock.The cables should not be damaged, stressed, loaded, or pinched. Otherwise, it may cause an electric shock.During power-on or operation, do not open the front cover of the s driver. Otherwise, it may cause an electric shock.Do not operate the driver with the front cover removed. High-voltage terminals and charging area are exposed and you may get an electric shock.Except for wiring and periodic inspection, do not remove the front cover of the driver even if the power is off. The driver is charged and you may get an electric shock.To prevent an electric shock, always connect the protective earth (PE) terminal (marked ) of the driver to the protective earth (PE) of the cabinet.To avoid an electric shock, insulate the connections of the power supply terminals.4. Additional instructionsThe following instructions should also be fully noted. Incorrect handling may cause a fault, injury, electric shock, etc.CAUTIONProvide an external emergency stop circuit to ensure that operation can be stopped and power switched off immediately.Do not disassemble, repair, or modify the equipment.Before resetting an alarm, make sure that the run signal of the driver is off in order to prevent a sudden restart. Otherwise, it may cause an accident.Use a noise filter to reduce the effects of electromagnetic interference. Electromagnetic interference may occur on electronic devices used near the driver.Do not burn or disassemble the driver, as toxic gas may be generated.Please dispose a driver, battery (primary battery) and other options according to your local laws and regulations. Please display or notify the final product as necessary.EEP-ROM lifeThe number of write times to the EEP-ROM, which stores parameter settings, etc., is limited to 100,000. If the total number of the following operations exceeds 100,000, the driver may malfunction when the EEP-ROM reaches the end of its useful life.Write to the EEP-ROM due to parameter setting changesWrite to the EEP-ROM due to device changesOrigin setting in absolute position detection systemSTO function of the driverWhen using the STO function of the driver, refer to chapter 13.Compliance with global standardsFor the compliance with global standards, refer to appendix 4.«About the manuals»You must have this Instruction Manual and the following manuals to use this servo. Ensure to prepare them to use the LECSN2-T□ safely.«Wiring»Wires mentioned in this Instruction Manual are selected based on the ambient temperature of 40 °C. «U.S. customary units»U.S. customary units are not shown in this manual. Convert the values if necessary according to the following table.CONTENTS1.1 Summary ............................................................................................................................................. 1-2 1.2 Function block diagram ....................................................................................................................... 1-3 1.3 Driver standard specifications ............................................................................................................. 1-6 1.4 Combinations of driver and servo motors ........................................................................................... 1-7 1.5 Function list ......................................................................................................................................... 1-8 1.6 Model designation ............................................................................................................................. 1-11 1.7 Structure ............................................................................................................................................ 1-14 1.7.1 Parts identification ........................................................................................................................ 1-14 1.8 Installation and removal of network card .......................................................................................... 1-15 1.9 Configuration including peripheral equipment .................................................................................. 1-182.1 Installation direction and clearances ................................................................................................... 2-3 2.2 Keep out foreign materials .................................................................................................................. 2-5 2.3 Encoder cable stress........................................................................................................................... 2-5 2.4 Inspection items .................................................................................................................................. 2-5 2.5 Parts having service lives ................................................................................................................... 2-6 2.6 Restrictions when using this product at altitude exceeding 1000 m and up to 2000 m above sea level ..2-73.1 Input power supply circuit ................................................................................................................... 3-3 3.2 I/O signal connection example ............................................................................................................ 3-6 3.2.1 For sink I/O interface ...................................................................................................................... 3-6 3.2.2 For source I/O interface ................................................................................................................. 3-7 3.3 Explanation of power supply system ................................................................................................... 3-8 3.3.1 Signal explanations ........................................................................................................................ 3-8 3.3.2 Power-on sequence ....................................................................................................................... 3-9 3.3.3 Wiring CNP1, CNP2, and CNP3 .................................................................................................. 3-10 3.4 Connectors and pin assignment ....................................................................................................... 3-12 3.5 Signal (device) explanations ............................................................................................................. 3-14 3.5.1 Input device .................................................................................................................................. 3-14 3.5.2 Output device ............................................................................................................................... 3-16 3.5.3 Output signal ................................................................................................................................ 3-18 3.5.4 Power supply ................................................................................................................................ 3-18 3.6 Forced stop deceleration function ..................................................................................................... 3-19 3.6.1 Forced stop deceleration function ................................................................................................ 3-19 3.6.2 Base circuit shut-off delay time function ...................................................................................... 3-21 3.6.3 Vertical axis freefall prevention function ...................................................................................... 3-22 3.6.4 Residual risks of the forced stop function (EM2) ......................................................................... 3-22 3.7 Alarm occurrence timing chart .......................................................................................................... 3-23 3.7.1 When you use the forced stop deceleration function ................................................................... 3-23 3.7.2 When you do not use the forced stop deceleration function ........................................................ 3-24 3.8 Interfaces .......................................................................................................................................... 3-25 3.8.1 Internal connection diagram ......................................................................................................... 3-253.8.2 Detailed explanation of interfaces ................................................................................................ 3-26 3.8.3 Source I/O interfaces ................................................................................................................... 3-28 3.9 Servo motor with a lock ..................................................................................................................... 3-29 3.9.1 Safety precautions ....................................................................................................................... 3-29 3.9.2 Timing chart .................................................................................................................................. 3-30 3.9.3 Wiring diagrams (LE-□-□series servo motor) .......................................................................... 3-36 3.10 Grounding ....................................................................................................................................... 3-374.1 Switching power on for the first time ................................................................................................... 4-3 4.1.1 Startup procedure .......................................................................................................................... 4-3 4.1.2 Wiring check ................................................................................................................................... 4-4 4.1.3 Surrounding environment ............................................................................................................... 4-5 4.2 Startup ................................................................................................................................................. 4-5 4.3 Switch setting and display of the driver............................................................................................... 4-7 4.3.1 Switches ......................................................................................................................................... 4-7 4.3.2 Scrolling display ............................................................................................................................. 4-8 4.3.3 Status display of an axis .............................................................................................................. 4-10 4.4 Test operation ................................................................................................................................... 4-12 4.5 Test operation mode ......................................................................................................................... 4-12 4.5.1 Test operation mode in Setup software (MR Configurator2TM) .................................................. 4-13 4.5.2 Motor-less operation in upper side ............................................................................................... 4-175.1 Parameter list ...................................................................................................................................... 5-2 5.1.1 Basic setting parameters ([Pr. PA_ _ ]) .......................................................................................... 5-3 5.1.2 Gain/filter setting parameters ([Pr. PB_ _ ]) ................................................................................... 5-4 5.1.3 Extension setting parameters ([Pr. PC_ _ ]) .................................................................................. 5-6 5.1.4 I/O setting parameters ([Pr. PD_ _ ]).............................................................................................. 5-8 5.1.5 I/O Extension setting 2 parameters ([Pr. PE_ _ ]) .......................................................................... 5-9 5.1.6 Extension setting 3 parameters ([Pr. PF_ _ ]) .............................................................................. 5-11 5.1.7 Positioning control parameters ([Pr. PT_ _ ]) ............................................................................... 5-13 5.1.8 Network setting parameters ([Pr. PN_ _ ]) ................................................................................... 5-16 5.2 Detailed list of parameters ................................................................................................................ 5-17 5.2.1 Basic setting parameters ([Pr. PA_ _ ]) ........................................................................................ 5-17 5.2.2 Gain/filter setting parameters ([Pr. PB_ _ ]) ................................................................................. 5-31 5.2.3 Extension setting parameters ([Pr. PC_ _ ]) ................................................................................ 5-44 5.2.4 I/O setting parameters ([Pr. PD_ _ ])............................................................................................ 5-64 5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ]) .............................................................................. 5-68 5.2.6 Extension setting 3 parameters ([Pr. PF_ _ ]) .............................................................................. 5-72 5.2.7 Positioning control parameters ([Pr. PT_ _ ]) ............................................................................... 5-74 5.2.8 Network setting parameters ([Pr. PN_ _ ]) ................................................................................... 5-99 5.3 Software limit ..................................................................................................................................... 5-99 5.4 How to set the electronic gear ........................................................................................................ 5-100 5.4.1 Electronic gear setting in the cyclic synchronous mode, profile mode and point table method 5-100 5.4.2 Electronic gear setting in the indexer method ............................................................................ 5-1026.1 Different adjustment methods ............................................................................................................. 6-2 6.1.1 Adjustment on a single driver ......................................................................................................... 6-2 6.1.2 Adjustment using setup software (MR Configurator2TM) .............................................................. 6-3 6.2 One-touch tuning ................................................................................................................................. 6-4 6.2.1 One-touch tuning flowchart ............................................................................................................ 6-5 6.2.2 Display transition and operation procedure of one-touch tuning ................................................... 6-6 6.2.3 Caution for one-touch tuning ........................................................................................................ 6-11 6.3 Auto tuning ........................................................................................................................................ 6-12 6.3.1 Auto tuning mode ......................................................................................................................... 6-12 6.3.2 Auto tuning mode basis ................................................................................................................ 6-13 6.3.3 Adjustment procedure by auto tuning .......................................................................................... 6-14 6.3.4 Response level setting in auto tuning mode ................................................................................ 6-15 6.4 Manual mode .................................................................................................................................... 6-16 6.5 2gain adjustment mode ..................................................................................................................... 6-207.1 Filter setting ......................................................................................................................................... 7-2 7.1.1 Machine resonance suppression filter ........................................................................................... 7-2 7.1.2 Adaptive filter II............................................................................................................................... 7-5 7.1.3 Shaft resonance suppression filter ................................................................................................. 7-7 7.1.4 Low-pass filter ................................................................................................................................ 7-8 7.1.5 Advanced vibration suppression control II ..................................................................................... 7-8 7.1.6 Command notch filter ................................................................................................................... 7-13 7.2 Gain switching function ..................................................................................................................... 7-14 7.2.1 Applications .................................................................................................................................. 7-14 7.2.2 Function block diagram ................................................................................................................ 7-15 7.2.3 Parameter ..................................................................................................................................... 7-16 7.2.4 Gain switching procedure ............................................................................................................. 7-19 7.3 Tough drive function.......................................................................................................................... 7-23 7.3.1 Vibration tough drive function ....................................................................................................... 7-23 7.3.2 Instantaneous power failure tough drive function ........................................................................ 7-25 7.4 Compliance with SEMI-F47 standard ............................................................................................... 7-29 7.5 Model adaptive control disabled ....................................................................................................... 7-31 7.6 Lost motion compensation function .................................................................................................. 7-32 7.7 Super trace control ............................................................................................................................ 7-358.1 Explanations of the lists ...................................................................................................................... 8-2 8.2 Alarm list ............................................................................................................................................. 8-3 8.3 Warning list ....................................................................................................................................... 8-11 8.4 Remedies for alarms ......................................................................................................................... 8-14 8.5 Remedies for warnings ..................................................................................................................... 8-54 8.6 Troubleshooting at power on ............................................................................................................ 8-65 8.7 Trouble which does not trigger an alarm/warning ............................................................................. 8-669.1 Driver ................................................................................................................................................... 9-2。
ocs-3标准 -回复

ocs-3标准-回复什么是OCS3标准?OCS3标准是指"Open Collaboration Services 3"(开放协作服务3)标准,它是一种协议和规范的集合,用于实现不同的Web应用程序之间的集成和协作。
该标准的目的是促进开放、互操作和可扩展的协作环境,使不同的应用程序能够共享数据和功能,提供统一的用户体验。
OCS3标准的架构:OCS3标准的架构由三个主要组件组成:客户端、服务端和协作服务器。
客户端是指用户使用的各种Web应用程序,如电子邮件客户端、办公套件、社交媒体平台等。
客户端提供用户界面,允许用户访问和操作数据、执行功能。
服务端是指提供Web应用程序后台功能的服务器。
服务端负责处理用户请求、验证用户身份、管理数据和提供服务。
协作服务器是OCS3标准的核心组件,它提供了协作和集成的关键功能。
协作服务器充当中间层,使得不同的客户端和服务端能够相互通信和共享数据。
协作服务器自带了OCS3标准的协议和API,用于实现各种协作功能,如数据同步、权限管理、通知和消息传递等。
OCS3标准的主要特性:OCS3标准具有以下主要特性,用于实现开放、互操作和可扩展的协作环境:1. 开放性(Openness):OCS3标准是基于开放协议和API的,任何开发者都可以使用标准来构建和扩展自己的应用程序。
这使得不同的应用程序能够共享数据和功能,实现集成和协作。
2. 互操作性(Interoperability):OCS3标准定义了一套共同的协议和格式,用于实现不同应用程序之间的通信和数据交换。
这使得用户可以在不同的应用程序之间无缝地切换和共享数据。
3. 可扩展性(Scalability):OCS3标准允许开发者根据自己的需求进行定制和扩展。
开发者可以根据自己的业务逻辑和数据模型来扩展协作服务器,以满足自己的特定需求。
4. 安全性(Security):OCS3标准包含了一套安全机制,用于保护用户数据的机密性和完整性。
OPEN-3000系统基本功能及应用介绍
➢ 【案例 2】 XX 公司调控中心因监控员交接班检查 及班中巡视未到位,导致未及时发现变电站公用测 控数据不刷新异常情况。
➢ 案例描述:
基本应用
监控日志 应包含:当班操作记录、电气缺陷和通信自 动化异常记录、开关跳闸记录、置牌记录、 巡视记录、无功优化系统记录、视频缺陷记 录、上级来文、重要联系事项等记录 。
交接班
1. 交班值应负责检查监控日志记录(含设备状态), 操作指令票,停役申请书许可终结, 缺陷情况,设 备变更,继电保护整定书记录等正确。
➢ 暴露问题:
1、值班监控员安全意识薄弱,在接到现场异常情况 汇报后,未引起重视,未做登记记录,是此次事故发 生的重要原因;
2、值班监控员遥控操作结束后没采取防范措施,交 接班也不向接班人员交待,是这次事故发生的直接原 因。
➢ 防止对策:
1、加强《调度操作规程》学习,严格执行监控联系 与交接班制度,做到不漏记、不漏交。
危险点分析 3. 严禁随意解锁遥
控操作
控制功能
研究态的应用
全景PDR 极值潮流回顾
研究态的应用:全景PDR
OPEN-3000系统具备全部采集数据(模拟量、开 关量等)的追忆能力,可以全方位地记录、保存 电网的事故状态,并且能够真实、完整地反演电 网的事故过程,即使电网模型已经发生了很大的 变化也能够真实地反映当时的情况 。
OPEN-3000
OPEN3000系统基本功能及 应用介绍
二0一五年十月十四日
主要内容
一、 OPEN3000界面介绍 二、 OPEN3000基本功能介绍 三、 OPEN3000基本应用介绍
M & SM指令的应用

m0hot_melt 1 ready (HMI)SM1m1hot_melt 2 ready (HMI)SM53 m2hot_melt 3 ready (HMI)SM60 m3hot_melt 4 ready (HMI)SM61 m4Lotion pump run(HMI)SM400 m5Machine Running SM401 m650msec pulse1SM402 m750msec pulse2SM403 m825msec pulse SM404 m9SM405 m10Machine Pulse SM406 m11B/S Mi. gule enable flag auto SM407 m12B/S Mi. gule enable flag(manual)SM408 m13SM409 m14Dry run flag SM410 m15>1ppm running flag SM411 m16reject 1 manual Select Pulse SM412 m17manual reject 1 Select SM413 m18reject 2 manual Select Pulse SM414 m19reject 2 manual Select SM415 m20SM416 m21Total product count clear SM417 m22Good product count clear SM418 m23information change SM419 m24auto reset SM420 m25Reject 1Allow Bypass at Low Spdm26Phase Return in Progressto HMI SM1031 m27m28m29m30Bypass Splice Sensorm31Area 4 Disabledm32PF Startup Delay (HMI)m33SFA/PFA Single Control (option)m34Offline ETA Sys Installedm35m36MRP Diameter Count Delay Flagm37m38OPT Diameter Count Delay Flagm39HCH Temp Bitm40m41m42m43m44m45m46m47m48m49blower manual startm50warning buzzer enable flagm51aux.motors auto flagm52aux.motors manual flagm54Brush Motors Manual Startm55Brush Motors Manual Stopm56m57m58m59m60aux. motors startup autom61Mill Auto Starup Flagm62vacuum suction fan starup flag m63suction fan auto starup flagm64MRP vacuum pump auto starup flag m65vacuum pump 2 auto starup flag m66trim moving fan 1 starup flagm67dust moving fan starup flagm68trim moving fan 2 starup flagm69blower enablem70brush motor enablem71RST Vacuum Pump Enablem72belt 1 amplifier readym73belt 2 amplifier readym74top sheet traction amp. readym75fluff pulp transport amp. ready m76Vacuum Suction Fan Man Startm77Vacuum Suction Fan Man Stopm78Mill Start Manualm79Mill Stop Manualm80Suction Fan Man Startm81Suction Fan Man Stopm82MRP PumpManual Startm83MRP PumpManual Stopm84Trim Fan1 ManualStartm85Trim Fan1 ManualStopm86Dust Removing Fan Man Startm87Dust Removing Fan Man Stopm88Trim Removing Fan 2 Man Start m89Trim Removing Fan 2 Man Stop m90Advance Button PLS Setting HMI m91Retard Button PLS Setting HMIm92Crimper PLS Button HMIm93PFA PLS Button HMIm94Pouch Crimper PLS Button HMIm95Crimper PLS Selected HMIm96PFA PLS Selected HMIm97Pouch Crimper PLS Selected HMI m98m99m100m101mill trippedm102vacuum suction fan trippedm103suction fan trippedm104MRP vacuum pump trippedm105Auxiliary motor stop alarmm106trim removing fan 1 trippedm108trim removing fan 2 trippedm109blower trippedm110brush motor trippedm111backside disconect offm112DryLap safety cover openm113Normal stop 6m114E-stop 6m115fluff pulp trans. SVamp alarmm116normal stop 1m117E-stop 1m118backside normal stop 1m119backsideE-stop 1m120channel curve enwindm121B/S braek detectm122B/S-L SVamp alarmm123B/S-R SVamp alarmm124normal stop 2m125E-stop 2m126upper pressing heating alarmm127lower pressing heating alarmm128upper channel curve heating alar m129lower channel curve heating alar m130B/S reject missing alarmm131T/S reject missing alarmm132P/F reject missing alarmm133MRP reject missing alarmm134OPT reject missing alarmm135RST reject missing alarmm136Transfer tank high alarmm137crimping enwind detectm138upper crimping heating alarmm139lower crimping heating alarmm140upper P77 heating alarmm141lower P77 heating alarmm142hot melt 1 alarmm143T/S break alarmm144T/S-L SVamp alarmm145T/S-R SVamp alarmm146MOS N-stopm147MRP around motor trippedm148OPT around motor trippedm149Printer fault alarmm150Printer Chamber unload alarmm151Printer turn manual alarmm152Anilox disconSW OFF alarmm153hot melt 2 alarmm154hot melt 3 alarmm155hot melt 4 alarmm156P/F break alarmm157P/F-L SVamp alarmm158P/F-R SVamp alarmm159normal stop 3m160E-stop 3m162Spare Faultm163Spare Faultm164Ink tank high alarmm165Spare Faultm166MRP break alarmm167normal stop 4m168E-stop 4m169backside normal stop 2m170backsideE-stop 2m171upper ind.sealing heating alarm m172lower ind.sealing heating alarm m173ind. sealing enwind alarmm174Viscosity alarmm175pump-B overload alarmm176pump-B disconnect off alarmm177SFA(DS) pressure high alarmm178SFA(DS) pressure high alarmm179OPT break alarmm180PLC self alarmm181E-stop MOSm182tri-fold jam detectm183trim removing break detectm184dust removing fan disconnect off m185air pressure low alarmm186safety door 1 openm187safety door 2 openm188safety door 3 openm189safety door 4 openm190safety door 5 openm191safety door 6 openm192safety door 7 openm193safety door 8 openm194safety door 9 openm195safety door 10 openm196safety door 11 openm197safety door 12 openm198safety door 13 openm199safety door 14 openm200safety door 15 openm201safety door 16 openm202safety door 17 openm203safety door 18 openm204brush motor disconnect offm205station 1 disconnect offm206station 2 disconnect offm207station 3 disconnect offm208station 4 disconnect offm209wing folding jamm210mill motor disconnect offm211trim motor 1 disconnect offm212Ross valve fault detectm213trim motor 2 disconnect offm214normal stop 5m216VSA(O/S) pressure high alarmm217WLA(D/S) pressure high alarmm218WLA(O/S) pressure high alarmm219CBA pressure high alarmm220HA pressure high alarmm221VSA(center) pressure high alarm m222PFA pressure high alarmm223SFA pressure high alarmm224core missing alarmm225MRP vacuum pump disconnect off m226spare alarmm227vacuum suction fan disconect off m228blower disconnect offm229suction fan disconnect offm230left brush protect relay offm231right brush protect relay off m232HM4 pump 1 pressure input alarm m233HM4 pump 2 pressure input alarm m234Axis 1 servo errorm235Axis 2 servo errorm236Axis 3 servo errorm237Axis 4 servo errorm238Axis 5 servo errorm239Axis 6 servo errorm240Axis 7 servo errorm241Axis 8 servo errorm242Axis 9 servo errorm243Axis 10 servo errorm244Axis 11 servo errorm245Axis 12 servo errorm246Axis 13 servo errorm247Axis 14 servo errorm248Axis 15 servo errorm249Axis 16 servo errorm250Axis 17 servo errorm251Axis 18 servo errorm252Axis 19 servo errorm253Axis 20 servo errorm254Axis 21 servo errorm255Axis 22 servo errorm256Axis 23 servo errorm257Axis 24 servo errorm258Axis 25 servo errorm259Axis 26 servo errorm260Axis 27 servo errorm261Axis 28 servo errorm262Axis 29 servo errorm263Axis 30 servo errorm264Axis 31 servo errorm265Axis 32 servo errorm266All servo on errorm267MRP servo amplifier alarmm268OPT servo amplifier alarmm270RST break alarmm271spare alarmm272RST vacuum pump trippedm273RST vacuum pump discon. Offm274Fire alarm detectm275Fire system troublem276unit roller up positionm277Servo System Faultm278Perfume gun faultm279Perfume pump faultm280Scent pressure errorm281Lotion tank alarmm282Lotion pressure errorm28324P2 voltage downm284Spare alarmm285Air flow detect1m286Air flow detect2m287Air flow detect3m288reservedm2891301A1 Safety door openm290Osprey Main FanOffm291Stacker Not Ready toRunm292Flow Wrapper NotReadyto Run m293Axis 33 servo errorm294Axis 34 servo errorm295reservedm296reservedm297reservedm298reservedm299reservedm300reservedm301B/S-L calculation faultm302B/S-R calculation faultm303T/S-L calculation faultm304T/S-R calculation faultm305P/F-L calculation faultm306P/F-R calculation faultm307MRP calculation faultm308OPT calculation faultm309Spare alarmm310Spare alarmm311Spare alarmm312Spare alarmm313Spare alarmm314Spare alarmm315Spare alarmm316Spare alarmm317Spare alarmm318Spare alarmm319Spare alarmm320Spare alarmm321Spare alarmm322Spare alarmm324Spare alarmm325Fluff Unwind Reset HMIm326B/S UNWIND RESET HMIm327T/S MRP UNWIND RESET HMIm328P/F UNWIND RESET HMIm329OPT UNWIND RESET HMIm340auto speed up flagm350Product Missing+Reject 1 Enable m377RST Clutch Turn Off Flagm400B/S-L diameter enter(HMI)m401B/S-R diameter enter(HMI)m402T/S-L diameter enter(HMI)m403T/S-R diameter enter(HMI)m404P/F-L diameter enter(HMI)m405P/F-R diameter enter(HMI)m406MRP-L diameter enter(HMI)m407MRP-R diameter enter(HMI)m408OPT-L diameter enter(HMI)m409OPT-R diameter enter(HMI)m415From HMI Of Main Screenm416m417m418m419m420B/S-L diameterm421B/S-R diameterm422T/S-L diameterm423T/S-R diameterm424P/F-L diameterm425P/F-R diameterm440B/S dancer roll balance position m441m442T/S dancer roll balance position m443m444P/F dancer roll balance position m445m446m447m448m449m450B/S Reject Clear From HMIm451T/S Reject Clear From HMIm452MRP Reject Clear From HMIm453OPT Reject Clear From HMIm454P/F connect Rej. Clear From HMI m455RST Connect Clear From HMIm456Core Missing Clear From HMIm457MRP Missing Clear From HMIm458OPT Missing Clear From HMIm459Product Missing Clear From HMI m460PadPhase Error Clear From HMIm461RST Missing Clear From HMIm462Spear Clear from HMIm464Spear Clear from HMIm465Spear Clear from HMIm466P/F Mistrack Clear From HMI m467Spear Clear from HMIm468Spear Clear from HMIm469Spear Clear from HMIm470Spear Clear from HMIm471Spear Clear from HMIm500alarm flagm501Alarm ON triggerm502buzzer alarm flagm503P-stop flagm504material finish warningm505Material Reject Information m506buzzer on flagm507m508m509m510B/S L finish flagm511B/S R finish flagm512T/S L finish flagm513T/S R finish flagm514P/F L finish flagm515P/F R finish flagm516MRP Finish Flagm517OPT finish flagm518Christo reject flagm519RST R Finish Flagm520fluff pulp L finish flagm521fluff pulp R finish flagm530B/S L finish flagm531B/S R finish flagm532T/S L finish flagm533T/S R finish flagm534P/F L finish flagm535P/F R finish flagm536MRP Finish Flagm537OPT finish flagm538m539m540fluff pulp L finish flagm541fluff pulp R finish flagm542Solvent finish flagm543ink finish flagm560B/S reject on flag(HMI)m561T/S reject on flag(HMI)m562MRP connecter reject(HMI) m563OPT connecter reject(HMI) m564P/F connecter reject(HMI) m565RST connecter reject(HMI) m566core missing reject(HMI)m567MRP missing reject(HMI)m568OPT missing reject(HMI)m570Pad phase error reject(HMI)m571RST missing reject(HMI)m572spare flag(HMI)m573spare flag(HMI)m574DryLap splice reject flag(HMI) m575spare flag(HMI)m576PF Misstreck reject(HMI)m577Manual Reject 2(HMI)m578Startup Rejects (HMI)m579sparem580B/S L P-stopm581B/S R P-stopm582T/S L P-stopm583T/S R P-stopm584P/F L P-stopm585P/F R P-stopm586MRP P-stopm587OPT P-stopm588MRP P-stop2m589OPT P-stop2m600B/S L ready pulsem601B/S L selectm602B/S R ready pulsem603B/S R selectm604B/S L-R flagm605B/S R-L flagm606B/S Splice Flagm620T/S L ready pulsem621T/S L selectm622T/S R ready pulsem623T/S R selectm624T/S L-R flagm625T/S R-L flagm626T-S Splice Flagm640P/F L ready pulsem641P/F L selectm642P/F R ready pulsem643P/F R selectm644P/F L-R flagm645P/F R-L flagm646P/F Splice Flagm660MRP Ready Pulsem661MRP Selectm662m663m664MRP Splice Flagm680OPT ready pulsem681OPT selectm682m683m684OPT Splice Flagm685m686m688m689MRP Motor Stop Delay Selectm690MRP Motor Enable Flagm691OPT Motor Stop Delay Selectm692OPT Splice Finish Flagm693m694RST L to R flagm695RST R to L flagm696RST L Runing Flagm697RST R Runing Flagm724MRP L-R Flagm725MRP R-L Flagm726MRP Splice Flagm744OPT L-R Flagm745OPT R-L Flagm746OPT Splice Flagm747m748m749m750eRST L Ready Pulsem751RST L Ready Selectm752RST R Ready Pulsem753RST R Select Flagm791MRP Ready Flagm800B/S splice detectm801T/S splice detectm802P/F splice detectm803MRP splice detectm804OPT splice detectm805RST splice detectm814B/S break detect HMIm815T/S break detect HMIm816P/F break detect HMIm817MRP break detect HMIm818OPT break detect HMIm819B/S L min. diamter detect HMI m820B/S R min. diamter detect HMI m821T/S L min. diamter detect HMI m822T/S R min. diamter detect HMI m823P/F L min. diamter detect HMI m824P/F R min. diamter detect HMI m825MRP finish detect HMIm826OPT finish detect HMIm827pressing unit position HMIm828channel curve position HMIm829crimping up roller position HMI m830P77 position HMIm831final knife position HMIm832m833good product count HMIm834trim DS break detect HMIm835trim OS break detect HMIm850Product Missing Signalm852m853m854m855P/F misstrack signalm856Core Missing PE errorm857MRP Missing Signalm858OPT missing Flagm859Product Missing Flagm887Pump Speed errorm888Pump OKm889pressure errorm890m891m892m893m894m895m896m897m898m899m900Wing slot glue mask flagm901m902m903product missing delay flagm904m905product missing flagm906m907m908m909m910Reject 1 Stop Wing Gluem911shift aream912shift aream913Reject 1 delay flagm914shift aream915shift aream916shift aream917shift aream918shift aream950pouching film splice HA select m951pouching film splice HA offm1000B/S reject on flagm1001T/S reject on flagm1002MRP connecter detectm1003OPT connecter detectm1004P/F connecter detectm1005RST Connect reject flagm1006core missing reject flagm1007MRP missing reject flagm1008OPT missing Flagm1009Product Missing /total count m1010Pad phase Rejectm1012Spare Reject Signalm1013Spare Reject Signalm1014DryLap splice reject signal m1015Spare Reject Signalm1016P/F Mistrack Reject Signalm1017Manual Reject 2m1018Startup Rejectsm1019Spare Reject Signalm1020Area 4 Disabledm1021Spare Reject Signalm1022Spare Reject Signalm1023Spare Reject Signalm1024Spare Reject Signalm1025Spare Reject Signalm1026Spare Reject Signalm1027Spare Reject Signalm1028Spare Reject Signalm1029Spare Reject Signalm1030Spare Reject Signalm1031Spare Reject Signalm1032Spare Reject Signalm1033Spare Reject Signalm1034Spare Reject Signalm1035Spare Reject Signalm1036Spare Reject Signalm1037Spare Reject Signalm1038Spare Reject Signalm1051OPT mnissing detect Flagm1052Reject 2 Manual Select Signalm1070Reject Signalm1071m1072m1073m1074m1075Reject Pad withPLSm1076m1077m1078m1079m1080B/S(wing) slot glue(auto) select m1210Drum Forward from MOSm1211Drum Backwardfrom MOSm1212MRP Cut Forward from MOSm1213MRP Cut Backwardfrom MOSm1214FK Forward from MOSm1215FK Backwardfrom MOSm1216CompressForward from MOSm1217CompressBackwardfrom MOSm1218Ch CurveForward from MOSm1219Ch CurveBackwardfrom MOSm1220Crimper Forward from MOSm1221Crimper Backwardfrom MOSm1222P77 Forward from MOSm1224OPT Cut Forward from MOS m1225OPT Cut Backwardfrom MOS m1226Trifld AForward from MOS m1227Trifld ABackwardfrom MOS m1228Trifld BForward from MOS m1229Trifld BBackwardfrom MOS m1230Ind SealForward from MOS m1231Ind SealBackwardfrom MOS m1232Ind Cut Forward from MOS m1233Ind Cut Backwardfrom MOS m1234RST Cut Forward from MOS m1235RST Cut Backwardfrom MOS m1236Printer Forward from MOS m1237Printer Backwardfrom MOS m1405Machine Stop Delay Flag m1500Machine Runing Delay Flag m1501Machine Delay Runing Flag m1502Phase Return Complete m1503Under MAXspeed flagm1504MAXspeed flagm1505Machine Runing Flagm1506machine stop flagm1507machine startup pulsem1508machine start pulsem1509m1510Drum Forward (to SFC) m1511Drum Backward(to SFC) m1512MRP Cut Forward (to SFC) m1513MRP Cut Backward(to SFC) m1514FK Forward (to SFC) m1515FK Backward(to SFC) m1516CompressForward (to SFC) m1517CompressBackward(to SFC) m1518Ch CurveForward (to SFC) m1519Ch CurveBackward(to SFC) m1520Crimper Forward (to SFC) m1521Crimper Backward(to SFC) m1522P77 Forward (to SFC) m1523P77 Backward(to SFC) m1524OPT Cut Forward (to SFC) m1525OPT Cut Backward(to SFC) m1526Trifld ABackward(to SFC) m1527Trifld AForward(to SFC) m1528Trifld BForward (to SFC) m1529Trifld BBackward(to SFC) m1530Ind SealForward (to SFC) m1531Ind SealBackward(to SFC) m1532Ind Cut Forward (to SFC) m1533Ind Cut Backward(to SFC) m1534RST Cut Forward (to SFC) m1535RST Cut Backward(to SFC) m1536Printer Forward (to SFC) m1537Printer Backward(to SFC)m1539m1540Normal Stop 5 Flagm1541Phase Return Command to SFC m1542to sfcm1543home return flag(sfc)m1544Phased Units Readym1545m1546m1547m1548m1549m1550machine runing command to SFCm1551machine stop command to SFCm1552m1553Motion Bus Up (simulated)m1554m1555m1556m1557m1558m1559m1560Copy Offsets From SFCComplete m1561m1562m1563m1564m1565m1566m1567m1568m1569m1570Drum Forward (to SFC)m1571Drum Backward(to SFC)m1572MRP Cut Forward (to SFC)m1573MRP Cut Backward(to SFC)m1574FK Forward (to SFC)m1575FK Backward(to SFC)m1576CompressForward (to SFC)m1577CompressBackward(to SFC)m1578Ch CurveForward (to SFC)m1579Ch CurveBackward(to SFC)m1580Crimper Forward (to SFC)m1581Crimper Backward(to SFC)m1582P77 Forward (to SFC)m1583P77 Backward(to SFC)m1584OPT Cut Forward (to SFC)m1585OPT Cut Backward(to SFC)m1586Trifld AForward (to SFC)m1587Trifld ABackward(to SFC)m1588Trifld BForward (to SFC)m1589Trifld BBackward(to SFC)m1590Ind SealForward (to SFC)m1591Ind SealBackward(to SFC)m1593Ind Cut Backward(to SFC) m1594RST Cut Forward (to SFC) m1595RST Cut Backward(to SFC) m1596Printer Forward (to SFC) m1597Printer Backward(to SFC) m1598m1599m1600m1601SFC Axis 1 Clutch Enable m1602SFC Axis 2 Clutch Enable m1603SFC Axis 3 Clutch Enable m1604SFC Axis 4 Clutch Enable m1605SFC Axis 5 Clutch Enable m1606SFC Axis 6 Clutch Enable m1607SFC Axis 7 Clutch Enable m1608SFC Axis 8 Clutch Enable m1609SFC Axis 9 Clutch Enable m1610SFC Axis 10 Clutch Enable m1611SFC Axis 11 Clutch Enable m1612SFC Axis 12 Clutch Enable m1613SFC Axis 13 Clutch Enable m1614SFC Axis 14 Clutch Enable m1615SFC Axis 15 Clutch Enable m1616SFC Axis 16 Clutch Enable m1617SFC Axis 17 Clutch Enable m1618SFC Axis 18 Clutch Enable m1619SFC Axis 19 Clutch Enable m1620SFC Axis 20 Clutch Enable m1621SFC Axis 21 Clutch Enable m1622SFC Axis 22 Clutch Enable m1623SFC Axis 23 Clutch Enable m1624SFC Axis 24 Clutch Enable m1625SFC Axis 25 Clutch Enable m1626SFC Axis 26 Clutch Enable m1627SFC Axis 27 Clutch Enable m1628SFC Axis 28 Clutch Enable m1629SFC Axis 29 Clutch Enable m1630SFC Axis 30 Clutch Enable m1631SFC Axis 31 Clutch Enable m1632SFC Axis 32 Clutch Enable m1633SFC Axis 33 Clutch Enable m1634SFC Axis 34 Clutch Enable m1635SFC Axis 35 Clutch Enable m1636SFC Axis 36 Clutch Enable m1637SFC Axis 37 Clutch Enable m1638SFC Axis 38 Clutch Enable m1639SFC Axis 39 Clutch Enable m1640SFC Axis 40 Clutch Enable m1704Home Axis 4 (to SFC) m1705m1706m1707m1708Home Axis 8 (to SFC)m1710m1711m1712Home Axis 12 (to SFC)m1713Home Axis 13 (to SFC)m1714Home Axis 14 (to SFC)m1715Home Axis 15 (to SFC)m1716Home Axis 16 (to SFC)m1717m1718m1719Home Axis 19 (to SFC)m1720Home Axis 20 (to SFC)m1721Home Axis 21 (to SFC)m1722Home Axis 22 (to SFC)m1723m1724m1725m1726m1727Home Axis 27 (to SFC)m1728m1729m1730Home Axis 30 (to SFC)m1808SFC Error Resetm1985Phase Return Finishedfrom SFC m3101Buzzer Off Signalm3102Buzzer Off Signalm3103Buzzer Off Signalm3104Buzzer Off Signalm3105Buzzer Off Signalm3106Buzzer Off Signalm3107Buzzer Off Signalm3108Buzzer Off Signalm3109Buzzer Off Signalm3110Buzzer Off Signalm3111Buzzer Off Signalm3112Buzzer Off Signalm3113Buzzer Off Signalm3114Buzzer Off Signalm3115Buzzer Off Signalm3116Buzzer Off Signalm3117Buzzer Off Signalm3118Buzzer Off Signalm3119Buzzer Off Signalm3120Buzzer Off Signalm3121Buzzer Off Signalm3122Buzzer Off Signalm3123Buzzer Off Signalm3124Buzzer Off Signalm3125Buzzer Off Signalm3126Buzzer Off Signalm3127Buzzer Off Signalm3128Buzzer Off Signalm3129Buzzer Off Signalm3130Buzzer Off Signalm3135Buzzer Off Signal m3136Buzzer Off Signal m3137Buzzer Off Signal m3138Buzzer Off Signal m3139Buzzer Off Signal m3140Buzzer Off Signal m3141Buzzer Off Signal m3142Buzzer Off Signal m3143Buzzer Off Signal m3144Buzzer Off Signal m3145Buzzer Off Signal m3146Buzzer Off Signal m3147Buzzer Off Signal m3148Buzzer Off Signal m3149Buzzer Off Signal m3150Buzzer Off Signal m3151Buzzer Off Signal m3152Buzzer Off Signal m3153Buzzer Off Signal m3154Buzzer Off Signal m3155Buzzer Off Signal m3156Buzzer Off Signal m3157Buzzer Off Signal m3158Buzzer Off Signal m3159Buzzer Off Signal m3160Buzzer Off Signal m3161Buzzer Off Signal m3162Buzzer Off Signal m3163Buzzer Off Signal m3164Buzzer Off Signal m3165Buzzer Off Signal m3166Buzzer Off Signal m3167Buzzer Off Signal m3168Buzzer Off Signal m3169Buzzer Off Signal m3170Buzzer Off Signal m3171Buzzer Off Signal m3172Buzzer Off Signal m3173Buzzer Off Signal m3174Buzzer Off Signal m3175Buzzer Off Signal m3176Buzzer Off Signal m3177Buzzer Off Signal m3178Buzzer Off Signal m3179Buzzer Off Signal m3180Buzzer Off Signal m3181Buzzer Off Signal m3182Buzzer Off Signal m3183Buzzer Off Signal m3184Buzzer Off Signalm3189Buzzer Off Signal m3190Buzzer Off Signal m3191Buzzer Off Signal m3192Buzzer Off Signal m3193Buzzer Off Signal m3194Buzzer Off Signal m3195Buzzer Off Signal m3196Buzzer Off Signal m3197Buzzer Off Signal m3198Buzzer Off Signal m3199Buzzer Off Signal m3200Buzzer Off Signal m3201Buzzer Off Signal m3202Buzzer Off Signal m3203Buzzer Off Signal m3204Buzzer Off Signal m3205Buzzer Off Signal m3206Buzzer Off Signal m3207Buzzer Off Signal m3208Buzzer Off Signal m3209Buzzer Off Signal m3210Buzzer Off Signal m3211Buzzer Off Signal m3212Buzzer Off Signal m3213Buzzer Off Signal m3214Buzzer Off Signal m3215Buzzer Off Signal m3216Buzzer Off Signal m3217Buzzer Off Signal m3218Buzzer Off Signal m3219Buzzer Off Signal m3220Buzzer Off Signal m3221Buzzer Off Signal m3222Buzzer Off Signal m3223Buzzer Off Signal m3224Buzzer Off Signal m3225Buzzer Off Signal m3226Buzzer Off Signal m3227Buzzer Off Signal m3228Buzzer Off Signal m3229Buzzer Off Signal m3230Buzzer Off Signal m3231Buzzer Off Signal m3232Buzzer Off Signal m3233Buzzer Off Signal m3234Buzzer Off Signal m3235Buzzer Off Signal m3236Buzzer Off Signal m3237Buzzer Off Signal m3238Buzzer Off Signalm3243Buzzer Off Signal m3244Buzzer Off Signal m3245Buzzer Off Signal m3246Buzzer Off Signal m3247Buzzer Off Signal m3248Buzzer Off Signal m3249Buzzer Off Signal m3250Buzzer Off Signal m3251Buzzer Off Signal m3252Buzzer Off Signal m3253Buzzer Off Signal m3254Buzzer Off Signal m3255Buzzer Off Signal m3256Buzzer Off Signal m3257Buzzer Off Signal m3258Buzzer Off Signal m3259Buzzer Off Signal m3260Buzzer Off Signal m3261Buzzer Off Signal m3262Buzzer Off Signal m3263Buzzer Off Signal m3264Buzzer Off Signal m3265Buzzer Off Signal m3266Buzzer Off Signal m3267Buzzer Off Signal m3268Buzzer Off Signal m3269Buzzer Off Signal m3270Buzzer Off Signal m3271Buzzer Off Signal m3272Buzzer Off Signal m3273Buzzer Off Signal m3274Buzzer Off Signal m3275Buzzer Off Signal m3276Buzzer Off Signal m3277Buzzer Off Signal m3278Buzzer Off Signal m3279Buzzer Off Signal m3280Buzzer Off Signal m3281Buzzer Off Signal m3282Buzzer Off Signal m3283Buzzer Off Signal m3284Buzzer Off Signal m3285Buzzer Off Signal m3286Buzzer Off Signal m3287Buzzer Off Signal m3288Buzzer Off Signal m3289Buzzer Off Signal m3290Buzzer Off Signal m3291Buzzer Off Signal m3292Buzzer Off Signalm3297Buzzer Off Signalm3298Buzzer Off Signalm3299Buzzer Off Signalm3300Buzzer Off Signalm3301Buzzer Off Signalm3302Buzzer Off Signalm3303Buzzer Off Signalm3304Buzzer Off Signalm3305Buzzer Off Signalm3306Buzzer Off Signalm3307Buzzer Off Signalm3308Buzzer Off Signalm3309Buzzer Off Signalm3310Buzzer Off Signalm3311Buzzer Off Signalm3312Buzzer Off Signalm3313Buzzer Off Signalm3314Buzzer Off Signalm3315Buzzer Off Signalm3316Buzzer Off Signalm3317Buzzer Off Signalm3318Buzzer Off Signalm3319Buzzer Off Signalm3320Buzzer Off Signalm3321Buzzer Off Signalm3322Buzzer Off Signalm3323Buzzer Off Signalm3324Buzzer Off Signalm3404Home Axis 4 from MOSm3405m3406m3407m3408Home Axis 8 from MOSm3409Home Axis 9 from MOSm3410m3411m3412Home Axis 12 from MOSm3413Home Axis 13 from MOSm3414Home Axis 14 from MOSm3415Home Axis 15 from MOSm3416Home Axis 16 from MOSm3417m3418m3419Home Axis 19 from MOSm3420Home Axis 20 from MOSm3421Home Axis 21 from MOSm3422Home Axis 22 from MOSm3423m3424m3425Homing Mode Enabled (HMI)m3427Home Axis 27 from MOS m3428m3429m3430Home Axis 30 from MOS m3500Buzzer On Flagm3501Buzzer On Flagm3502Buzzer On Flagm3503Buzzer On Flagm3504Buzzer On Flagm3505Buzzer On Flagm3506Buzzer On Flagm3507Buzzer On Flagm3508Buzzer On Flagm3509Buzzer On Flagm3510Buzzer On Flagm3511Buzzer On Flagm3512Buzzer On Flagm3513Buzzer On Flagm3514Buzzer On Flagm3515Buzzer On Flagm3516Buzzer On Flagm3517Buzzer On Flagm3518Buzzer On Flagm3519Buzzer On Flagm3520Buzzer On Flagm3521Buzzer On Flagm3522Buzzer On Flagm3523Buzzer On Flagm3524Buzzer On Flagm3525Buzzer On Flagm3526Buzzer On Flagm3527Buzzer On Flagm3528Buzzer On Flagm3529Buzzer On Flagm3530Buzzer On Flagm3531Buzzer On Flagm3532Buzzer On Flagm3533Buzzer On Flagm3534Buzzer On Flagm3535Buzzer On Flagm3536Buzzer On Flagm3537Buzzer On Flagm3538Buzzer On Flagm3539Buzzer On Flagm3540Buzzer On Flagm3541Buzzer On Flagm3542Buzzer On Flagm3543Buzzer On Flagm3544Buzzer On Flagm3545Buzzer On Flagm3546Buzzer On Flagm3547Buzzer On Flagm3548Buzzer On Flagm3553Buzzer On Flag m3554Buzzer On Flag m3555Buzzer On Flag m3556Buzzer On Flag m3557Buzzer On Flag m3558Buzzer On Flag m3559Buzzer On Flag m3560Buzzer On Flag m3561Buzzer On Flag m3562Buzzer On Flag m3563Buzzer On Flag m3564Buzzer On Flag m3565Buzzer On Flag m3566Buzzer On Flag m3567Buzzer On Flag m3568Buzzer On Flag m3569Buzzer On Flag m3570Buzzer On Flag m3571Buzzer On Flag m3572Buzzer On Flag m3573Buzzer On Flag m3574Buzzer On Flag m3575Buzzer On Flag m3576Buzzer On Flag m3577Buzzer On Flag m3578Buzzer On Flag m3579Buzzer On Flag m3580Buzzer On Flag m3581Buzzer On Flag m3582Buzzer On Flag m3583Buzzer On Flag m3584Buzzer On Flag m3585Buzzer On Flag m3586Buzzer On Flag m3587Buzzer On Flag m3588Buzzer On Flag m3589Buzzer On Flag m3590Buzzer On Flag m3591Buzzer On Flag m3592Buzzer On Flag m3593Buzzer On Flag m3594Buzzer On Flag m3595Buzzer On Flag m3596Buzzer On Flag m3597Buzzer On Flag m3598Buzzer On Flag m3599Buzzer On Flag m3600Buzzer On Flag m3601Buzzer On Flag m3602Buzzer On Flag。
F-35 Lightning Flight Controller User Manual

F-35 LIGHTNINGFLIGHT CONTROLLERUSER MANUAL VERSION 1.5ContentsManual user log (3)Introduction (4)Features (4)Pinouts (5)Dimensions (5)Connections (6)Connection with ESCs and Servos: (6)1.Flying Wing: (6)2.Airplane: (6)Connection With Receivers: (9)I.TBS Receiver (9)1. TBS Crossfire Micro Rx V2 (Plug and play with Micro Rx Cable) (9)2. TBS Crossfire Micro Rx V2 (Plug and Play with Micro Rx and TBS-Ext Cable forWireless Connection) (9)3. TBS Crossfire Diversity Rx Only Use CRSF Protocol (10)4. TBS Crossfire Diversity Rx Use PPM + Serial TX-RX (11)II.FrSky Receiver (12)1.XSR (Plug and Play with F-RX Cable) (12)2.R-XSR (12)3.R9 (13)4.R9 Slim (13)5.L9R (14)6.SPD15 (14)7.XM+ (15)III.Futaba Receiver (15)IV.DJI Ocussync Air Unit (16)V.Spektrum Receiver (16)VI.Dragon Link Micro UHF Receiver (17)Connection with VTX: (19)1. Using with Stealth Long Range VTX (Plug and Play with VTX Cable) (19)ing with Tramp HV (20)ing with TBS Unify Pro 5G8 HV: (20)ing with TBS Unify 2G4: (21)Connection with Furious AirSpeed Sensor (21)Connection with Furious FPV GPS Module (Plug and Play with GPS Cable) (22)Connection with RadioLink M8N GPS (23)Connection with Camera (Plug and Play with CAM Cable) (24)1. RunCam Eagle 2 (24)2. RunCam Swift 2 (24)3. RunCam Split 2 (25)4. Foxeer Arrow Mini (25)How To Set Up Wing With INAV Configurator (26)How To Calibrate Sensor (27)How To Connect INAV Wireless To F-35 Via TBS Crossfire TX (29)How To Connect Smartphone To F-35 Lightning FC Via FuriousFPV Bluetooth Module (31)How To Setup Failsafe (33)How To Use NAV LAUNCH (Auto Take Off) Function (34)INAV MODE (35)How to assembly silicone for airspeed sensor (36)Video Guide (36)Frequently Asked Questions (37)Manual user logV1.5:Update configure with DJI OcuSync Air Unit*Please note: In this manual, BLUE Texts have hyperlinks to check out guideline.IntroductionFurious FPV F-35 Lightning FC - Elevate Your Horizons.Step into the all new F-35 Lightning FC - Furious FPV's 1st dedicated wing flight controller, ready and waiting to open all new worlds to winged FPV.Encompassed by a robust aluminum case for maximum levels of protection and strength, the F-35 FC offers the ultimate levels of FPV capability that is dedicated & purpose built for the demands and capabilities of FPV winged flight.Ultra easy to install with a massively powerful MCU STM F4 micro controller, the F-35 Lightning FC supports a full (6) UART's for GPS, VTX Control, S.PORT Telemetry, Crossfire RX, RX, Bluetooth functionality. With these systems in play, the F-35 offers worlds of capability & performance for maximum levels of FPV flight.Integrating a built in 5V@3A BEC, buzzer port, anti-vibration silicone dampeners and battery monitor with current sensor, the F-35 Lightning FC packs a massive punch in an ultra-compact form. Pair this with a built in Barometer & OSD system, the F-35 FC is the game changing flight controller that is ready for anything and everything a pilot could possibly desire.Take your winged FPV flight to new worlds and beyond with the Furious FPV F-35 Lightning FC - the ultimate winged FPV flight control system.Features∙Flight Controller 6DOF + 3DOF MAG∙MCU STM F4 high performance∙Built-in OSD∙Support up to 6 UARTs (GPS, VTX Control, S.PORT Telemetry,Crossfire RX, RX, Bluetooth)∙Built-in Driver Inverter for SBUS and S.PORT connections∙Built-in Battery Voltage and Current monitor∙Camera and VTX port built-in Peripheral pass∙Built-in 5V@3A BEC for small Digital servos, can be easily changed to External BEC for bigger Servos∙Built-in Buzzer port∙High quality silicone wires with optimized lengths are included∙Support INAV firmware∙Vertical USB and ports => easy to install∙Pro version has GPS module, AirSpeed Sensor, Buzzer and Bluetooth Module∙Weight: 34g∙Voltage Range: 2S-6S LiPoPinoutsDimensionsConnectionsConnection with ESCs and Servos: 1.Flying Wing:-Location ESC: 1, 2-Location Servos: 3, 4Ex: Reptile S800 Sky Shadow Flying Wing2.Airplane:-Location ESC: 1, 2-Location Servos: 3, 4, 5, 6Ex1: Volantex RangerEx2: Twin DreamOpen INAV Configurator Go to CLI tab and paste this strings as the picture above. Then, hit Enter:# mixermixer CUSTOMAIRPLANEmmix resetmmix 0 1.000 0.000 0.000 0.300 #Left motormmix 1 1.000 0.000 0.000 -0.300 #Right motor# servo mixsmix resetsmix 0 3 0 100 0 #servo 3 takes Stabilised ROLL (PWM 4)smix 1 4 0 100 0 #servo 4 takes Stabilised ROLL (PWM 5)smix 2 5 2 100 0 #servo 5 takes Stabilised YAW (PWM 6)smix 3 2 1 100 0 #servo 2 takes Stabilised PITCH (PWM 3)saveEx 3: V-TailOpen INAV Configurator Go to CLI tab and paste this strings. Then, hit Ente r: # mixermixer CUSTOMAIRPLANEmmix resetmmix 0 1.0 0.0 0.0 0.0 # motorsmix resetsmix 0 2 0 -100 0 # servo 2 takes Stabilised ROLLsmix 1 3 0 -100 0 # servo 3 takes Stabilised ROLLsmix 2 4 1 100 0 # servo 4 takes Stabilised PITCHsmix 3 5 1 -100 0 # servo 5 takes Stabilised -PITCHsmix 4 4 2 -100 0 # servo 4 takes Stabilised YAWsmix 5 5 2 -100 0 # servo 5 takes Stabilised YAWsmix 6 6 8 -100 0 # servo 6 takes RC AUX 1 (camera yaw)smix 7 7 9 -100 0 # servo 7 takes RC AUX 2 (drop bomb)saveConnection With Receivers:*Warning: Only support power is 5V for receiverI.TBS Receiver1.TBS Crossfire Micro Rx V2 (Plug and play with Micro Rx Cable)2.TBS Crossfire Micro Rx V2 (Plug and Play with Micro Rx and TBS-Ext Cablefor Wireless Connection)Video: Wireless connection to INAV via TBS Crossfire Tx + TBS Micro Rx V23.TBS Crossfire Diversity Rx Only Use CRSF Protocol4.TBS Crossfire Diversity Rx Use PPM + Serial TX-RX*Note:To using PPM, you need to open INAV Configurator Go to Configuration tab and drag to Receiver Mode. Then, select PPM RX input as the picture belowII.FrSky Receiver1.XSR (Plug and Play with F-RX Cable)2.R-XSR4.R9 Slim6.SPD15III.Futaba ReceiverIV.DJI Ocussync Air UnitV.Spektrum ReceiverVI.Dragon Link Micro UHF ReceiverOpen INAV Configurator Go to Configuration tab and drag to Receiver Mode. Then, select like as the picture below*Note:With Dragon Link V2 Rx, please use the Dragon Link GUI software to configure CH7 port from PPM (default) to SBUSDownload software:DragonLink GUIConnection with VTX:ing with Stealth Long Range VTX (Plug and Play with VTX Cable)ing with Tramp HV*Note: If using our VTX Cable, please swap wires the same as pin outs of this VTX ing with TBS Unify Pro 5G8 HV:ing with TBS Unify 2G4:Connection with Furious AirSpeed Sensor Check out How to assembly silicone tube for Airspeed sensorConnection with Furious FPV GPS Module (Plug and Play with GPS Cable)*Warning:For the first time set up and whenever you change your location. You need to leave the Wing or Airplane on the field for approximately 5 minutes so that the GPS is updatedOpen INAV Configurator →Click Configuration tab → Drag to GPS and configure as the picture below:Connection with RadioLink M8N GPSOpen INAV Configurator →Click Configuration tab → Drag to GPS and configure as the picture below:Connection with Camera (Plug and Play with CAM Cable)1.RunCam Eagle 22.RunCam Swift 23.RunCam Split 24.Foxeer Arrow MiniHow To Set Up Wing With INAV ConfiguratorStep1:Calibrate Sensor(Click double to go to How to calibrate Sensor page)INAV requires you to follow the accelerometer calibration steps. These steps are different to Cleanflight & Betaflight. So don't skip reading this section, it's vitally important. But we have wireless so you should do this in the final step.Step2:Set up “Ports” tabIf use TBS Crossfire Micro receiver, you don’t need to change anything. Because we have ready configuredIf use XSR receiver, Please turn on Serial Rx of UART3 to use Receiver Mode Step3:Set up “Configuratios” tabIf use TBS Crossfire Micro receiver,you don’t need to change anything. Because we have ready configuredIf use XSR receiver, drag to Receiver Mode and select SBUS in the Serial Receiver ProviderChange model: There are two models that you can choose: Airplane and Flying WingStep4:Configure “Receiver” tabCheck range and value: Your transmitter should use NO mixing at all (so separate channels for Thr, Ail, Rud, Ele).Check that when moving the sticks, the rightchannels moves in the receiver window. Also, everything should be centered at 1500us, and full stick movement should be 1000-2000us. Use sub trim and travel range on your TX to set this up.Check Channel Map: Please set correctly channel map with the channel on your transmitterStep5:Set up “Servos” tab-If reverse Servo, change "Direction and rate" from +100 to -100-If Servo exceed maximum wanted deflection reduce min/max-If control surfaces are not perfectly centered adjust servo midpoint. (This is after setting them up as close as possible mechanically)*Note:In the Servos tab servos are counted from 0-7 while in the Motors tab they run from 1-8.Step6: Set up Mode(click MODE to check mode’s description table)1.Select Mode tab2.Drag to mode that you want to use. Then, click Add Range and select CHchannel for switch that you want to use this modeStep7:Set FailsafeHow To Calibrate SensorAfter building new an Airplane, you must calibrate Magnetometer and Accelerometer sensor. With F-35 Lightning FC, we don't need to plug USB cable that can use wireless connection with FuriousFPV Bluetooth Module or TBS Crossfire TX. Step 1: Connect F-35 Lightning FC with INAV configuratorStep 2: At Setup tab1.Calibrate Accelerometer: Please click Calibrate Accelerometer to calibrate 6points Accelerometer sensor like the below pictures:pass Calibrate:Please click Calibrate Magnetometer then You have 30seconds to hold the copter in the air and rotate it so that each side (front, back, left, right, top and bottom) points down towards the earth.3.Board Orientation: If you have your board rotated in any way, change boardalignment to match- please check the below pictures:(1) (2)(3) (4)How To Connect INAV Wireless To F-35 Via TBS Crossfire TXThe Device:-TBS Micro RX V2 + TBS Crossfire TX-Micro RX cable for F-35 + TBS-External Cable for F-35 (Include in the package)-App: INAV Configurator on PC, EZ-Gui on Android.-Video: Wireless connection to INAV via TBS Crossfire Tx + TBS Micro Rx V2Step 1: Using TBS-Ext cable plug to Micro RX cable like bellow picture:Step 2: Mapping Output channels for TBS Micro RX.-Output 1: CRSF TX-Output 2: CRSF RX-Output 3: Serial RX-Output 4: Serial TXStep 3: Configure your TBS Crossfire Module.Please select Bluetooth protocol of TBS TX module is BRIDGE.*Note: Verify that you turn on Telemetry on ReceiverStep 4: Connect your device to use Configurator app.Option1: Connect with PC:e Bluetooth on PC search and add your TBS Module Bluetooth. NormallyTBS have name is Crossfire#### (# is number).2.Open INAV Configurator on PC, then check new number using toconnect TBS Crossfire TX and select it. (You can check it in Device Manager).And select Baud rate is 57600.3.Turn on WIRELESS mode of INAV at the Right-Top interface of app. Then, clickConnect button to connect.Now you can do anything with a wireless connection same when you connect with USB cable.Option2: Connect with EZ-Gui on Android app:1.Download and install app at here: DOWNLOAD2.Turn On Bluetooth on your mobile3.Open EZ Gui:Click icon 3 Vertical dots the Top-Right screen and click Settings to go to page setting and configure for Connections. At here, we will selectconnection is Bluetooth then click SELECT BT DEVICE to search you TBSCrossfire module and select it when detected your module.-Click next icon and select Firmware is Cleanflight/Betaflight/INAV.-Click next and select option same as units or another options. After app will come back home screen.4.At Home Screen, please click CONNECTS to connect your app to FC.How To Connect Smartphone To F-35 Lightning FC Via FuriousFPV Bluetooth ModuleThe Device:-FuriousFPV Bluetooth Module-App: INAV Configurator on PC, EZ-Gui on Android.-Video: Calibrate sensor with wireless connection Via Bluetooth moduleStep 1: Plug FuriousFPV module into F-35 Lightning FC. Then, go into Ports tab on the INAV Configurator and configure as the pictures below:Step 2: Connect with EZ-Gui on Android app1.Download and install app at here: DOWNLOAD2.Turn On Bluetooth on your mobile3.Open EZ Gui:Click icon 3 Vertical dots the Top-Right screen and click Settings to go to page setting and configure for Connections. At here, we will selectconnection is Bluetooth then click SELECT BT DEVICE to search you TBS Crossfire module and select it when detected your module.-Click next icon and select Firmware is Cleanflight/Betaflight/INAV.-Click next and select option same as units or another options. After app will come back home screen.4.At Home Screen, please click CONNECT to connect your app to FC. How To Setup FailsafeSetting up Return Home for Failsafe to purpose: when Wing lost signal with Transmitter, Wing will auto return home afterwardStep 1: Configure ReceiverThere are two options to configure:Option 1: Cut off the channelOption 2: Set Position1.Go into Modes tab and select a switch for Failsafe2.Set Switches and Sticks on your transmitter to the following below-Throttle: 0% (No throttle)-Aileron: 50% (No input, Stick center)-Rudder: 50% (No input, Stick center)-Elevator: 50% (No input, Stick center)-Failsafe mode: activated-Arm switch: Disarmed (If you use stick arming you can skip this)Step 2: Configure INAV Configurator1.Open INAV Configurator and go into Failsafe tab2.Enable RTH on the setting stageHow To Use NAV LAUNCH (Auto Take Off) Function Video: How to use NAV LAUNCH (Auto Take off) with F-35 Lightning FCStep1: Open “INAV Configurator”→Select “Mode” tab → drag to NAV LAUNCH function, click Add Range and select CH channel for switch that you want to use this modeStep2: Set switch to NAV LAUNCH mode prior to arming (note that it won't actually enable until arming)Step3: ARM the plane. Motor should start spinning at min_throttle (if MOTOR_STOP is active, motor won't spin)*Note:-NAV LAUNCH is automatically aborted after 5 seconds or by any pilot touch on PITCH/ROLL stick-Verify that motor don't respond to throttle stick motionStep4: Put throttle stick to desired throttle value to be set after launch is finished. Step5: Throw the airplane.*Note:It must be thrown leveled or thrown by slinging it by wingtipStep6: Launch sequence will finish when pilot switch off the NAV LAUNCH mode or move the sticksHow to assembly silicone for airspeed sensorVideo GuideVideo 1: Wireless connection to INAV via TBS Crossfire Tx + TBS Micro Rx V2 Video 2: Calibrate sensor with wireless connection Via Bluetooth module Video 3: How to use NAV LAUNCH (Auto Take off) with F-35 Lightning FC Video 4: How to flash firmware and calibrate AcceloremeterVideo 5: Calibrations sensor and active Compass Calibrate button on INAV 1.9 Video 6: Setup TBS Nano RX and set RSSI to F-35 LightningFrequently Asked QuestionsQ: Why don’t the Hardware Health work?A: In the (P1) picture, the Hardware Health is not working. The reason is that you don’t plug GPS module or don’t power on the FC. To solve this issue, you need to plug GPS module and verify that plugged battery for FC. Then, this function will work afterward as the (P2) picture.(P1)(P2)Q: Cannot Calibrate Acceloremeter or the Pitch and Roll values are not correctA: Please flash latest firmware and setup as the manualQ: How can I switch from External BEC to Internal BEC?A: Open your plastic case and refer the picture below Array Q: Is there a way to directly connect and configure LED Strips on the F-35 Lightning?A: F-35 Lightning don’t support LED StripsThanks for using our product。
Digilent ServoMini 自动驾驶舵控制板说明书

S e r v o M i n i™R e f e r e n c e M a n u a l®Revision: February 25, 2009Note: This document applies to REV B of the board. 215 E Main Suite D | Pullman, WA 99163 (509) 334 6306 Voice and FaxOverviewThe Digilent ServoMini board is useful for programmable control of up to eight RC servos for both students and hobbyists.The ServoMini’s versatile design and programmable microcontroller allows you to implement your own algorithms to control up to eight RC servos. This allows you to decide what method of control may be best suited for your application.The ServoMini can establish serial communication with other devices using TWI protocol from Atmel, or SPI. This enables you to use the ServoMini as a slave device, freeing up the workload of the master device. Using TWI, many ServoMinis can be linked onto a communication bus, giving it the ability to expand with your needs.The ServoMini can be powered using the screw terminal connector, the SPI port or J12. It supports a number of programming tools including Atmel AVR® Studio 4, and WinAVR. The device can be programmed using one of Digilent’s programming cables.Features include:∙ATmega168 microcontroller∙three LEDs∙ESD protection for all I/O pins∙in-system programming support using the Digilent parallel JTAG cable or theDigilent USB JTAG/SPI cable∙support for up to eight RC servos∙jumper selectable dedicated servopower supply∙TWI bus daisy chain connectors3 LEDsServoMini Circuit Diagram Features of the ATmega168 include:∙16KB program flash∙512 byte EEPROM∙1KB internal SRAM∙master/slave serial peripheral interface (SPI)∙Atmel two wire serial interface (TWI)∙10-bit ADC analysis of the AVR power supply along with the servo powersupply∙two 8-bit timer/counters∙one 16-bit timer/counterFor more information about the ATmega168,refer to the data sheet available at.Functional DescriptionThe ServoMini is designed for embedded control and robotic applications as well as microprocessor experimentation. Embedded firmware, suitable for many applications, can be programmed into the ServoMini’sATmega168 microcontroller.Although the ServoMini can be used as a stand-alone microcontroller board, it is also designed to be part of a larger system using distributed processing architecture. Connectors J9 and J10 allow it to be connected to a serial data bus using Atmel’s TWI protocol. In this case the ServoMini can receive instructions, such as desired positions for any of its eight servos, and then it can interpret that data as the designer sees fit. It can also transmit data, such as battery voltage information, for processing by another microcontroller.The Se rvoMini’s firmware could also be designed to monitor a few servo channels coming from an RC receiver and drive servos based on those pulse-widths. By doing this, the ServoMini could be used as a servo mixer or to control servos based on a custom algorithm. The ServoMini’s servo driving ability is only limited by the user’s imagination.RC servos use a pulse-width modulated signal (PWM) to control the servo position. The 8-bit and 16-bit timers in the AVR microcontroller are able to generate PWM signals using the output-compare registers, but only six PWM signals can be generated this way. It is also possible to use timer interrupts to control the servo timing. This allows a single timer (preferably the 16-bit timer) to control the signal timing for all eight servo connectors. The ServoMini Reference Design available at illustrates using timer interrupts to control signal timing for the PWM signals to control RC servos. Power Supply OptionsWhen a shorting block is installed on JP2, the servos will share the same power supply as the ServoMini’s processor. Power can be applied via the screw terminal connector, via connector J12 or pins 5 and 6 of the SPI connector, J11. The Atmega168 processor is rated for operation from 2.7 to 5.5 volts DC. Using a voltage outside this range could damage the ServoMini.Alternatively, if jumper JP2 is removed, the servos must have their own independent power supply connected to the screw terminals and the S ervoMini’s processor must be powered using either J12 or the SPI port.Device ProgrammingThe ServoMini has one in-system-programming connector, J11. The Digilent programming cable is connected to J11. Either a parallel JTAG or USB JTAB/SPI cable can be used. When connecting the programming cable, ensure that the VCC and GND pin labels from the cable match to the VCC and GND pins on the ServoMini.A power supply must be provided to the ServoMini when programming. The Digilent programming cable does not supply power to the board; the board it is plugged into powers the programming cable. The Digilent PmodREG1 voltage regulator module can be used, or any appropriately regulated power supply can be connected to J12. If the ServoMini is being used in conjunction with another Digilent board, such as the Cerebot or Minicon, these boards have connectors that can be used to supply power to the J12 connector on the ServoMini using a two-wire cable.Programming can be accomplished using the Digilent AVRP application, available by free download from the Digilent web site. It is also possible to configure the AVRDUDE programmer in the WinAVR release for in-system-programming using the Digilent parallelJTAG cable. See the documentation for these applications for more information on board programming.Connector J11 is used for both in-system-programming and for user access to the SPI controller. The jumper block JP1 is used to select between the two functions. The shorting block is placed in the RST position for in-system-programming, and in the SS position for user access to the SPI port.AVR Clock Fuse SettingsAVR microcontrollers use control bits called fuses to set basic operating parameters for the device. The SPI controller uses the clock source set by the fuses for its clock. If the clock source fuses are set to select a clock source that doesn’t exist on the board, the SPI controller won’t work and it will no longer be possible to program the microcontroller via the in-system programming protocol. The Servo Mini can only use the internal RC oscillator as the clock source.If the external oscillator, or one of thecrystal/resonator clock sources is selected, it may be possible to recover the board by applying a suitable clock signal to pin 1 of connectors J9 or J10. There is an applications note on the Digilent web site illustrating this technique for the Cerebot board.In addition, the maximum SPI clock frequency is the selected clock frequency divided by four. If the 128KHz internal oscillator is selected as the clock source, the SPI clock would need to be set to a frequency of 32KHz or less. The Digilent programming cables do not support frequencies that low, so if the 128KHz internal oscillator is selected for the clock source, the board will no longer be programmable using the Digilent programming cable.Two-Wire Serial InterfaceThe Atmel TWI interface is a medium speed (400 Kbps), synchronous, serial, communications bus. The TWI interface supports master or slave operation with up to 128 devices on the bus. Each device is given a unique address, and the protocol has the ability to address packets to a specific device or to broadcast packets to all devices on the bus. For detailed information on configuring and using the two-wire interface, see the ATmega168 data sheet at . The ServoMini connects to a TWI bus through the 2-pin connector, J9 and J10. Attaching these pins to a shared communications bus can create a daisy chain of ServoMinis or other TWI-capable boards.The TWI bus is an open-collector bus. Devices on the bus actively drive the signals low. When no device is driving the lines low, pull-up resistors achieve the high state on the TWI lines. A single device on the TWI bus must provide the pull-up resistors.The ServoMini provides pull-up resistors that are controlled by software. I/O port B, bits 6 and 7 (PB6 and PB7), are connected to the pull-up resistors. To enable the pull-ups, configure these pins as outputs and set the I/O port output bits to “1”. To disable the pull-ups, configure these pins as inputs with the internal pull-ups disabled. Both TWI pull-ups should be enabled or disabled together. Only one device on the TWI bus should have pull-ups enabled.A port bit is configured as an input or an output by setting the corresponding bit in the DDR register. The pin becomes an output by writing a “1” and an input by writing a “0”. When a pin is configured as an input, an internal pull-up resistor is enabled by writing the corresponding output port bit to “1” and disabled by writing it to “0”. See the Atmel ATmega168 data sheet for more information.On-Board User I/OThe ServoMini provides three on-board LEDs for user output. LEDs LD1 through LD3 are connected to PB0, PB1 and PD3 respectively. An LED is turned on by writing the pin to logic 1 and turned off by writing the pin to logic 0.Table 1 I/O Connections。
Servo-n 操作手册说明书
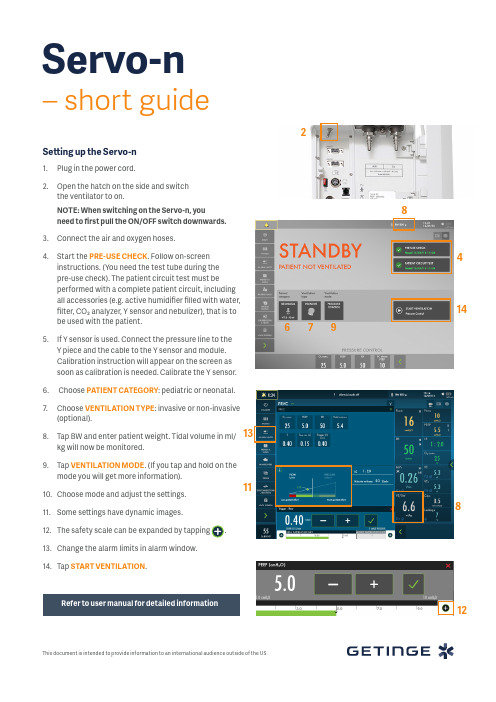
This document is intended to provide information to an international audience outside of the US.67414891112Servo-n– short guideSetting up the Servo-n1.Plug in the power cord.2. Open the hatch on the side and switchthe ventilator to on.NOTE: When switching on the Servo-n, youneed to first pull the ON/OFF switch downwards.3. Connect the air and oxygen hoses.4. Start the PRE-USE CHECK . Follow on-screeninstructions. (You need the test tube during the pre-use check). The patient circuit test must beperformed with a complete patient circuit, including all accessories (e.g. active humidifier filled with water, filter, CO₂ analyzer, Y sensor and nebulizer), that is to be used with the patient.5. If Y sensor is used. Connect the pressure line to theY piece and the cable to the Y sensor and module. Calibration instruction will appear on the screen as soon as calibration is needed. Calibrate the Y sensor.6. Choose PATIENT CATEGORY : pediatric or neonatal. 7. Choose VENTILATION TYPE : invasive or non-invasive(optional). 8. Tap BW and enter patient weight. Tidal volume in ml/kg will now be monitored. 9. Tap VENTILATION MODE . (If you tap and hold on themode you will get more information).10. Choose mode and adjust the settings.11. Some settings have dynamic images.12. The safety scale can be expanded by tapping.13. Change the alarm limits in alarm window.14. Tap START VENTILATION .2138This document is intended to provide information to an international audience outside of the US.Manufacturer · Maquet Critical Care AB · Röntgenvägen 2 SE-171 54 Solna · Sweden · +46 (0)10 335 73 00© M a q u e t C r i t i c a l C a r e A B 2017 · S e r v o -n i s a t r a d e m a r k o f M A Q U E T C r i t i c a l C a r e A B · M X -7427 R e v 01 · E n g l i s hsilence for two minutes by tapping.Current measured valueStop ventilation: tap MANEUVERS: Activate O₂ BOOST is active for one minute. under Maneuvers.Different VIEWS Autoset Alarm limits in controlled modesDirect access barNOTE: Alarms can be in one of three colors depending on priority: High priority Medium priorityLow priority。
开放伺服算法(open servo)

开放伺服算法Turbo PMAC的开放伺服算法特性允许用户使用高级语言编写Turbo PMAC的伺服算法程序,Turbo PMAC将以伺服中断的优先级执行此类程序。
开放伺服算法程序不仅可以用于伺服控制,也可以用于执行某些需要高优先级的任务,例如高频率的IO,特殊的反馈数据预处理,或特殊的伺服指令处理。
Turbo PMAC只能下载和执行一个开放伺服算法程序,该程序可以用于多个电机的伺服控制,下面板块会介绍电机专属的寄存器,如果想给不同的电机指定不同的伺服程序,必须在算法中加入明确的逻辑处理。
开放伺服算法同PLCC程序相似,但却有关键的两点不同:1.开放伺服算法严格的运行在伺服中断(否则会被看门狗咬),而PLCC则运行于实时中断,在繁重的运算任务时,可能会在某几个周期放弃执行PLCC。
2.开放伺服算法有着特定的入口与特殊的伺服功能寄存器。
运算特性Open servo提供了强大的运算特性,可以使用户轻松的编写复杂而灵活的算法。
编译器定义的指针变量为更直接有效的读取Turbo PMAC寄存器,开放伺服算法支持2类指针变量:L变量和F变量。
这两类变量的定义只占用编译时间,而非程序执行时间。
L变量是短(24位)寄存器指针,作为定点数值,这与工作于PLCC程序中的L变量相同,它可以读写X或Y寄存器,全24位或者其中的一部分。
F变量为长(48位)寄存器指针,如果F变量定义为L格式(例如F1->L:$10F0),寄存器会用作48位浮点数寄存器,如果F变量定义为D格式(例如F2->D:$88),寄存器会用作48位定点数,PMAC会在运算时自动完成定点浮点的转换,所以定点数也可用于浮点数计算。
注意:不要将L变量和L格式的F和M变量混淆,前者为短字,后者为长字。
Turbo PMAC并不能直接识别L和F变量,这些变量仅对编译器和上位机有意义。
相比之下,当使用Turbo PMAC的M变量时,每次读取该行时都要进行地址定义,这需要大约600ns的额外计算时间,然而,这种定义方式却允许用户在执行时改变M变量的定义,这是L和F变量所无法实现的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、PID控制#define MIN_POSITION(0)#if ENCODER_ENABLED#define MAX_POSITION(4095)#else#define MAX_POSITION(1023)#endif#define MAX_OUTPUT(255)PWM值的输出范围#define MIN_OUTPUT(-MAX_OUTPUT)static int16_t previous_seek;前一轨迹static int16_t previous_position;前一位置#if FULL_ROTATION_ENABLED看是否允许旋转360度static int16_t normalize_position_difference(int16_t posdiff)计算位置的偏差if (posdiff > ((MAX_POSITION - MIN_POSITION) / 2)){posdiff -= (MAX_POSITION - MIN_POSITION);}if (posdiff < -((MAX_POSITION - MIN_POSITION) / 2)){posdiff += (MAX_POSITION - MIN_POSITION);}return posdiff;#endif设置数字低通滤波器,k值为1#define FILTER_SHIFT 1static int32_t filter_reg = 0;static int16_t filter_update(int16_t input)输入为AD采来的位置电压值#if 0#if FULL_ROTATION_ENABLEDfilter_reg += normalize_position_difference(input - (filter_reg >> FILTER_SHIFT)); #elsefilter_reg = filter_reg - (filter_reg >> FILTER_SHIFT) + input;#endifreturn (int16_t) (filter_reg >> FILTER_SHIFT);#elsereturn input;输入为0 不处理#endifPID初始化void pid_init(void)previous_seek = 0;初始化之前的位置、轨迹值previous_position = 0;PID的部分值放入寄存器void pid_registers_defaults(void)registers_write_byte(REG_PID_DEADBAND, DEFAULT_PID_DEADBAND);pid的死区值设为默认值registers_write_word(REG_PID_PGAIN_HI, REG_PID_PGAIN_LO,DEFAULT_PID_PGAIN);设置默认PID参数值registers_write_word(REG_PID_DGAIN_HI, REG_PID_DGAIN_LO,DEFAULT_PID_DGAIN);registers_write_word(REG_PID_IGAIN_HI, REG_PID_IGAIN_LO,DEFAULT_PID_IGAIN);PID的位置限制值registers_write_word(REG_MIN_SEEK_HI, REG_MIN_SEEK_LO,DEFAULT_MIN_SEEK);registers_write_word(REG_MAX_SEEK_HI, REG_MAX_SEEK_LO,DEFAULT_MAX_SEEK);PID反位置的设置registers_write_byte(REG_REVERSE_SEEK, 0x00);PID值转化成PWM的控制输出,根据seek位置和速度计算出应送出的PWM值int16_t pid_position_to_pwm(int16_t current_position){声明一些状态static int16_t deadband;static int16_t p_component;static int16_t d_component;static int16_t seek_position;static int16_t seek_velocity;static int16_t minimum_position;static int16_t maximum_position;static int16_t current_velocity;static int16_t filtered_position;滤波后的位置static int32_t pwm_output;static uint16_t d_gain;static uint16_t p_gain;filtered_position = filter_update(current_position);让当前的位置经过低通滤波后得到的位置#if FULL_ROTATION_ENABLED由滤波后的位置得到当前速率current_velocity = normalize_position_difference(filtered_position -previous_position);#elsecurrent_velocity = filtered_position - previous_position;#endifprevious_position = filtered_position;当前位置变为上次的位置从寄存器中得到seek位置和速率seek_position = (int16_t) registers_read_word(REG_SEEK_POSITION_HI,REG_SEEK_POSITION_LO);seek_velocity = (int16_t) registers_read_word(REG_SEEK_VELOCITY_HI,REG_SEEK_VELOCITY_LO);从寄存器中得到最小最大位置minimum_position = (int16_t) registers_read_word(REG_MIN_SEEK_HI,REG_MIN_SEEK_LO);maximum_position = (int16_t) registers_read_word(REG_MAX_SEEK_HI,REG_MAX_SEEK_LO);是否对seek翻转if (registers_read_byte(REG_REVERSE_SEEK) != 0){用翻转后的位置和速率存入寄存器registers_write_word(REG_POSITION_HI, REG_POSITION_LO, (uint16_t)(MAX_POSITION - current_position));registers_write_word(REG_VELOCITY_HI, REG_VELOCITY_LO, (uint16_t) -current_velocity);翻转其他值seek_position = MAX_POSITION - seek_position;minimum_position = MAX_POSITION - minimum_position;maximum_position = MAX_POSITION - maximum_position;}else{直接将当前位置和速度存入寄存器registers_write_word(REG_POSITION_HI, REG_POSITION_LO, (uint16_t)current_position);registers_write_word(REG_VELOCITY_HI, REG_VELOCITY_LO, (uint16_t)current_velocity);}deadband = (int16_t) registers_read_byte(REG_PID_DEADBAND);从寄存器中读入死区if (seek_position == previous_seek) current_position = filtered_position;看看seek位置有没有改变,那当前位置就不变previous_seek = seek_position;更新之前的seek限幅if (seek_position < minimum_position) seek_position = minimum_position;if (seek_position > maximum_position) seek_position = maximum_position;设置比例参数的对象,对象为位置差#if FULL_ROTATION_ENABLEDp_component = normalize_position_difference(seek_position - current_position);#elsep_component = seek_position - current_position;#endif随着微分参数的对象,对象为速度差d_component = seek_velocity - current_velocity;从寄存器中读入PID参数p_gain = registers_read_word(REG_PID_PGAIN_HI, REG_PID_PGAIN_LO);d_gain = registers_read_word(REG_PID_DGAIN_HI, REG_PID_DGAIN_LO);pwm_output = 0;开始输出的PWM的值为0if ((p_component > deadband) || (p_component < -deadband))如果比例参数对象超出了死区的限定范围,则进入死区{pwm_output += (int32_t) p_component * (int32_t) p_gain;死区中只用比例参数}pwm_output += (int32_t) d_component * (int32_t) d_gain;否则还只加入微分参数// Shift by 8 to account for the multiply by the 8:8 fixed point gain values.pwm_output >>= 8;8为定点增益值,看是否输出饱和if (pwm_output > MAX_OUTPUT){pwm_output = MAX_OUTPUT;}else if (pwm_output < MIN_OUTPUT){pwm_output = MIN_OUTPUT;}return (int16_t) pwm_output;二、运功轨迹motion,有几个艾米特曲线段组成的连续的曲线#define MOTION_BUFFER_SIZE8缓冲区的大小#define MOTION_BUFFER_MASK(MOTION_BUFFER_SIZE - 1)extern uint8_t motion_head;运动的开始extern uint8_t motion_tail;运动的结尾extern uint32_t motion_counter;计算已走过的轨迹点的时间extern uint32_t motion_duration;运动的持续时间inline static void motion_enable(void)运动轨迹使能uint8_t flags_lo = registers_read_byte(REG_FLAGS_LO);读寄存器标志registers_write_byte(REG_FLAGS_LO, flags_lo |(1<<FLAGS_LO_MOTION_ENABLED));写使能标志位,标志写1inline static void motion_disable(void)运动轨迹不使能uint8_t flags_lo = registers_read_byte(REG_FLAGS_LO);读寄存器标志registers_write_byte(REG_FLAGS_LO, flags_lo &~(1<<FLAGS_LO_MOTION_ENABLED));使能标志清零inline static uint32_t motion_time_left(void)返回存的曲线走还要多长时间return motion_duration - motion_counter;#if CURVE_MOTION_ENABLED曲线轨迹使能typedef struct motion_key轨迹取一个结构体,为单个的轨迹点{uint16_t delta;位置之差float position;当前位置float in_velocity;float out_velocity;} motion_key;static motion_key keys[MOTION_BUFFER_SIZE];8个轨迹点static float int_to_float(int16_t a)无符号整型转换成浮点型return (float) a;static int16_t float_to_int(float a)浮点型转换成有符号整型return (int16_t) (a + 0.5);static float fixed_to_float(int16_t a)有符号定点型换成浮点型return ((float) a) / 1024.0;#if 0static int16_t float_to_fixed(float a)浮点型换成有符号定点型,不用return (int16_t) (a * 1024.0);#endifvoid motion_init(void)初始化曲线轨迹缓存motion_counter = 0;初始化计数motion_duration = 0;初始化曲线的持续时间motion_head = 0;初始化队列motion_tail = 0;keys[0].delta = 0;初始化轨迹点keys[0].position = 512.0;keys[0].in_velocity = 0.0;keys[0].out_velocity = 0.0;curve_init(0, 0, 512.0, 512.0, 0.0, 0.0);走艾米特曲线,进行曲线初始化motion_registers_reset();轨迹寄存器重启void motion_registers_reset(void)重启寄存器中的值registers_write_word(REG_CURVE_POSITION_HI, REG_CURVE_POSITION_LO, 0);轨迹点中的数据都放到寄存器中registers_write_word(REG_CURVE_IN_VELOCITY_HI, REG_CURVE_IN_VELOCITY_LO, 0);registers_write_word(REG_CURVE_OUT_VELOCITY_HI,REG_CURVE_OUT_VELOCITY_LO, 0);registers_write_word(REG_CURVE_DELTA_HI, REG_CURVE_DELTA_LO, 0);registers_write_byte(REG_CURVE_RESERVED, 0);更新曲线的状态registers_write_byte(REG_CURVE_BUFFER, motion_buffer_left());uint8_t motion_append(void)插补新的轨迹点,通过具体的偏差校正之前的曲线点,如果没有空间存储新的补插点或是偏差小于1则返回错误int16_t position;int16_t in_velocity;int16_t out_velocity;uint8_t next;uint16_t delta;next = (motion_head + 1) & MOTION_BUFFER_MASK;得到缓冲器中的下一个序列if (next == motion_tail) return 0;如果轨迹的头指针指向了尾部,则缓冲区已满,返回错误从寄存器中取出轨迹点的参数position = (int16_t) registers_read_word(REG_CURVE_POSITION_HI,REG_CURVE_POSITION_LO);in_velocity = (int16_t) registers_read_word(REG_CURVE_IN_VELOCITY_HI,REG_CURVE_IN_VELOCITY_LO);out_velocity = (int16_t) registers_read_word(REG_CURVE_OUT_VELOCITY_HI,REG_CURVE_OUT_VELOCITY_LO);delta = (uint16_t) registers_read_word(REG_CURVE_DELTA_HI,REG_CURVE_DELTA_LO);if (delta < 1) return 0;偏差小于1则返回错误keys[next].delta = delta;设置下一个轨迹点keys[next].position = int_to_float(position);keys[next].in_velocity = fixed_to_float(in_velocity);keys[next].out_velocity = fixed_to_float(out_velocity);if (motion_tail == motion_head)如果缓冲区是空的curve_init(0, delta, curve_get_p1(), keys[next].position, 0.0, 0.0);初始化一个新的艾米特曲线得到当前位置到新位置的曲线,速度取0,保证走的曲线比较平滑motion_duration += delta;增加轨迹的持续时间motion_head = next;设置轨迹的新序列motion_registers_reset();寄存器重启return 1;void motion_next(uint16_t delta)根据指示的位置偏差增加缓冲区的计数值,从缓存的实现轨迹点中得到位置和速度信息,如果偏差为0,返回当前位置和速度float fposition;float fvelocity;if (!(registers_read_byte(REG_FLAGS_LO) & (1<<FLAGS_LO_MOTION_ENABLED))) return;看看曲线轨迹模式在没在用if (motion_tail == motion_head)处理的是否为空的曲线{若是,计数和持续时间取0motion_counter = 0;motion_duration = 0;}else{若不是,增加计数时间motion_counter += delta;while (motion_counter > curve_get_duration())计数是否超过了曲线的持续时间{减少缓冲区的计数时间motion_counter -= curve_get_duration();motion_duration -= curve_get_duration();减少缓冲区的持续时间motion_tail = (motion_tail + 1) & MOTION_BUFFER_MASK;增加缓冲区的尾部指针处理下一个缓冲曲线if (motion_tail == motion_head)缓冲区空了?{curve_init(0, 0, keys[motion_head].position, keys[motion_head].position,0.0, 0.0);初始化一个新的艾米特曲线得到当前位置到新位置的曲线,速度取0,保证走的曲线比较平滑motion_counter = 0;motion_duration = 0;}else{uint8_t curr_point;uint8_t next_point;curr_point = motion_tail;取得曲线中的当前点和下一点next_point = (curr_point + 1) & MOTION_BUFFER_MASK;初始化一个新的艾米特曲线得到当前位置到新位置的曲线,内外速率设定下来curve_init(0, keys[next_point].delta,keys[curr_point].position, keys[next_point].position,keys[curr_point].out_velocity, keys[next_point].in_velocity);}registers_write_byte(REG_CURVE_BUFFER, motion_buffer_left());更新曲线的缓冲区,看还有多少空间}}curve_solve(motion_counter, &fposition, &fvelocity);从艾米特曲线中得到计数时间、速度、位置// The velocity is in position units a millisecond, but we really need the// velocity to be measured in position units every 10 milliseconds to match// the sample period of the ADC.fvelocity *= 10.0;要满足每10ms采样值符合AD采样周期registers_write_word(REG_SEEK_POSITION_HI, REG_SEEK_POSITION_LO,float_to_int(fposition));更新寄存器registers_write_word(REG_SEEK_VELOCITY_HI, REG_SEEK_VELOCITY_LO,float_to_int(fvelocity));uint8_t motion_buffer_left(void)返回缓冲区剩余的空间,也就是还剩多少轨迹点没走uint8_t space_left;if (motion_head < motion_tail)轨迹点还剩下了多少{space_left = (MOTION_BUFFER_SIZE - 1) - (MOTION_BUFFER_SIZE +motion_head - motion_tail);}else{space_left = (MOTION_BUFFER_SIZE - 1) - (motion_head - motion_tail);}return space_left;三、艾米特曲线CURVE,一段小曲线,AD采样中的一个周期#if CURVE_MOTION_ENABLEDextern uint16_t curve_t0;曲线输出的变量extern uint16_t curve_t1;extern uint16_t curve_duration;static float curve_duration_float;float curve_p0;float curve_p1;艾米特曲线的参数float curve_v0;float curve_v1;static float curve_a;艾米特立方多项式的系数static float curve_b;static float curve_c;static float curve_d;void curve_init(uint16_t t0, uint16_t t1, float p0, float p1, float v0, float v1)曲线的初始化curve_t0 = t0;设置曲线的时间参数curve_t1 = t1;curve_duration = t1 - t0;curve_duration_float = (float) curve_duration;v0 *= curve_duration_float;取曲线切线方向的速度,初始的时间域为0~1,衡量切线方向的准确性通过曲线的初始持续时间v1 *= curve_duration_float;通过此变量保证时间域始终在0~1curve_p0 = p0;设置艾米特曲线的参数curve_p1 = p1;curve_v0 = v0;curve_v1 = v1;// | a ||2-21 1 ||p0|// | b || -33-2-1 ||p1|// | c | = |0010 | . | (t1 - t0) * v0 |// | d ||1000 || (t1 - t0) * v1 |//设置艾米特立方多项式的系数// a = 2p0 - 2p1 + v0 + v1// b = -3p0 + 3p1 -2v0 - v1// c = v0// d = p0curve_a = (2.0 * p0) - (2.0 * p1) + v0 + v1;curve_b = -(3.0 * p0) + (3.0 * p1) - (2.0 * v0) - v1;curve_c = v0;curve_d = p0;void curve_solve(uint16_t t, float *x, float *dx)曲线结果,计算要走这个曲线的位置和速度,送来还要多少时间if (t <= curve_t0)现在运作的时间到没到这个阶段的曲线初始值,如果小于等于{*x = curve_p0;位置设为初始位置*dx = t < curve_t0 ? 0.0 : curve_v0;若刚到曲线初始值,速度为初始值位置,若没到则速度为零}else if (t >= curve_t1){现在运作的时间超过了这阶段的尾端值*x = curve_p1;位置设为尾端位置*dx = t > curve_t1 ? 0.0 : curve_v1;若刚到曲线尾端值,速度为尾端值位置,若超过则速度为零}else{float t1 = ((float) (t - curve_t0)) / curve_duration_float;motion中的当前计数时间减去初始值除去曲线持续时间,得到最终结束这阶段曲线的尾端值float t2 = t1 * t1;float t3 = t2 * t1;// x = at^3 + bt^2 + ct + d*x = (curve_a * t3) + (curve_b * t2) + (curve_c * t1) + curve_d;由公式求位置和速度// dx = 3at^2 + 2bt + c*dx = (3.0 * curve_a * t2) + (2.0 * curve_b * t1) + curve_c;*dx /= curve_duration_float;}。