在32位MCU平台间移植
STM32F10x系列移植到GD32E103系列1.0
2. 引脚兼容性
STM32F10x 与 GD32E103 在相同封装下是 Pin To Pin 兼容的。但由于外设功能上的细微差别,两 者引脚定义有少许不同,如表 1 所示。注意:STM32F10x 外设编号从 1 开始,GD32E103 外设编 号从 0 开始,且命名有差异。
Alternate:TIM8_CH3,SDIO_D0 Remap: TIM3_CH3 Default: PC
Alternate:TIM8_CH4,SDIO_D1 Remap: TIM3_CH4
Default: PA8 Alternate:USART1_CK,TIM1_CH1,
GD32E103 和 STM32F10x 系列相比,考虑软硬件兼容性,从 Flash 和 SRAM 容量,包括外设 模块的增强性能上来看,GD32E103 最接近 STM32F10x 互联性。
开始前您需要安装 GD32E103 关于 KEIL 或 IAR 的插件,在工程选项的器件条目中选择 GD32E103 对应型号,添加 GD32E103 的 Flash 下载算法。
CAN1_RX Default: PB13 Alternate:SPI1_SCK,I2S1_CK, USART2_CTS,TIMER0_CH0_ON, CAN1_TX,I2C1_TXFRAME Default: PB14 Alternate:SPI1_MISO,USART2_RTS, TIMER0_CH1_ON,TIMER11_CH0 Default: PB15 Alternate:SPI1_MOSI,I2S1_SD, TIMER0_CH2_ON,TIMER11_CH11 Default: PD15 Alternate:EXMC_D1 Remap: TIMER3_CH3,CTC_SYNC
STM8S 和 STM32 MCU 一致的 8-32 位产品线实现轻松移植

3.1 复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
● 寄存器大小:8 位与 16 或 32 位
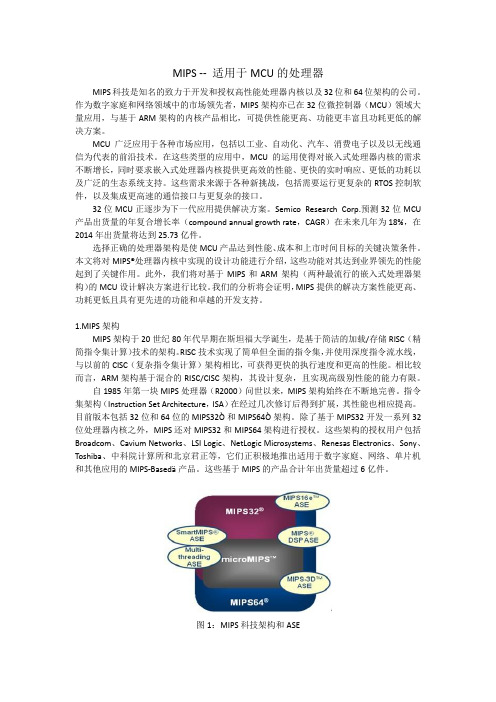
图 1 给出了数字外设的简化表示。
图 1.
数字外设的内部结构
ഄഔ᭄ᘏ㒓 $0%$670
ᘏ㒓ষ ᆘᄬ఼
,3ݙḌ
,2
DL
外设可分成两个主要部分。首先,内核包含状态机、计数器以及任意种类的组合逻辑或顺序 逻辑,它们是执行不需要处理器的任务(如低级通信层、模拟后端管理或时序驱动的功能) 时所必需的。如有必要,可通过 MCU 端口将内核与外界连接。外部连接可能包含一些 I/O 或复杂总线。其次,应用程序通过与内部总线连接的寄存器来初始化和控制外设,该内部总 线与其它 MCU 资源共用。在 8 位微控制器中,处理器直接写入和读取寄存器,而在 32 位 产品中,寄存器读写操作通常通过总线桥来完成。然而,两个系列的主要区别在于外设必须 遵循的内部总线规范。这解释了 STM8S 和 STM32 器件能够共用外设的原因:它们基于相 同的内核,而且仅针对两种不同的总线接口定制。ARM 处理器和外设符合 AMBA 总线规 范,采用 32 位数据总线,而 STM8S 器件使用更为简单但有效的 8 位总线标准。从功能角 度看,它们仅在以下方面存在差异:
2
NXPS32K11632位ARMMCU通用汽车应用解决方案
nxp公司的S32K116是满足AEC-Q100规范的基于ARM® Cortex®-M4F和ARM® Cortex®-M0+核32位MCU,集成了128KB闪存,CAN/CAN-FD控制器,遵从SHE指标的安全模块,工作电压2.7 V 到 5.5 V, RUN模式工作温度-40℃到105℃,RUN模式工作温度-40℃到125℃,主要用在汽车电子如车身和底盘控制,信息娱乐系统连接模块,车内空调控制(HVAC),车窗/车门/天窗,动力总成配套芯片以及PMSM/BLDC电机控制,停车辅助系统,发动机防盗锁止系统,触摸感应,安防性应用,摩托车CDI/EFI,电池管理,安全气囊,尾气后处理以及网关以及高可靠性工业应用.本文介绍了S32K116主要特性,S32K14x和S32K11x系列高级架构框图,评估板S32K116EVB主要特性和电路图.S32K is a scalable family of AEC-Q100 qualified 32-bit Arm® Cortex®-M4F and Cortex-M0+ based MCUs targeted for general purposeautomotive and high-reliability industrial applications.The S32K1xx product series further extends the highly scalable portfolio of Arm®Cortex®-M0+/M4F MCUs in the automotive industry. It builds on the legacy of the KEA series, while introducing higher memory optionsalongside a richer peripheral set extending capability into a variety ofautomotive applications. With a 2.70–5.5 V supply and focus onautomotive environment robustness, the S32K product series devices are well suited to a wide range of applications in electrically harshenvironments, and are optimized for cost-sensitive applications offeringlow pin-count options.The S32K product series offers a broad range of memory, peripherals, and package options. It sharescommon peripherals and pin counts,allowing developers to migrate easily within anMCU family or among the MCU families to take advantage of more memory or feature integration. This scalability allows developers to use the S32K product series as the standard for their end product platforms, maximizing hardware andsoftware reuse and reducing time to market.sS32K116主要特性:• Operating characteristics– Voltage range: 2.7 V to 5.5 V– Ambient temperature range: -40℃ to 105℃ forHSRUN mode, -40℃ to 125℃ for RUN mode• Arm™ Cortex-M4F/M0+ core, 32-bit CPU– Supports up to 112 MHz frequency (HSRUN mode)with 1.25 Dhrystone MIPS per MHz– Arm Core based on the Armv7 Architecture andThumb?-2 ISA– Integrated Digital Signal Processor (DSP)– Configurable Nested Vectored Interrupt Controller(NVIC)– Single Precision Floating Point Unit (FPU)• Clock interfacesNXP S32K11632位ARM MCU通用汽车应用解决方案– 4 - 40 MHz fast external oscillator (SOSC) with upto 50 MHz DC external square input clock inexternal clock mode– 48 MHz Fast Internal RC oscillator (FIRC)– 8 MHz Slow Internal RC oscillator (SIRC)– 128 kHz Low Power Oscillator (LPO)– Up to 112 MHz (HSRUN) System Phased LockLoop (SPLL)– Up to 20 MHz TCLK and 25 MHz SWD_CLK– 32 kHz Real Time Counter external clock(RTC_CLKIN)• Power management– Low-power Arm Cortex-M4F/M0+ core withexcellent energy efficiency– Power Management Controller (PMC) with multiplepower modes: HSRUN, RUN, STOP, VLPR, andVLPS. Note: CSEc (Security) or EEPROM writes/erase will trigger error flags in HSRUN mode (112MHz) because this use case is not allowed toexecute simultaneously.The device will need toswitch to RUN mode (80 Mhz) to execute CSEc(Security) or EEPROM writes/erase.– Clock gating and low power operation supported onspecific peripherals.• Memory and memory interfaces– Up to 2 MB program flash memory with ECC– 64 KB FlexNVM for data flash memory with ECCand EEPROM emulation. – Up to 256 KB SRAM with ECC– Up to 4 KB of FlexRAM for use as SRAM orEEPROM emulation Note: CSEc (Security) orEEPROM writes/erase will trigger error flagsinHSRUN mode (112 MHz) because this use case isnot allowed to execute simultaneously. The devicewill need to switch to RUN mode (80 MHz)toexecute CSEc (Security) or EEPROM writes/erase.– Up to 4 KB Code cache to minimize performanceimpact of memory access latencies– QuadSPI with HyperBus™ support• Mixed-signal analog– Up to two 12-bit Analog-to-Digital Converter(ADC) with up to 32 channel analog inputs permodule– One Analog Comparator (CMP) with internal 8-bitDigital to AnalogConverter (DAC)• Debug functionality– Serial Wire JTAG Debug Port (SWJ-DP) combines– Debug Watchpoint and Trace (DWT)– Instrumentation Trace Macrocell (ITM)– Test Port Interface Unit (TPIU)– Flash Patch and Breakpoint (FPB) Unit• Human-machine interface (HMI)– Up to 156 GPIO pins with interrupt functionality– Non-Maskable Interrupt (NMI)• Communications interfaces– Up to three Low Power Universal Asynchronous Receiver/Transmitter(LPUART/LIN) modules with DMA supportand low power availability– Up to three Low Power Serial Peripheral Interface (LPSPI) modules with DMA support and low power availability– Up to two Low Power Inter-Integrated Circuit (LPI2C) modules with DMA support and low power availability– Up to three FlexCAN modules (with optional CAN-FD support)– FlexIO module for emulation of communication protocols and peripherals (UART, I2C, SPI, I2S, LIN, PWM, etc).– Up to one 10/100Mbps Ethernet with IEEE1588 support and twoSynchronous Audio Interface (SAI) modules.• Safety and Security– Cryptographic Services Engine (CSEc) implements a comprehensive set of cryptographic functions as described in theSHE (Secure HardwareExtension) Functional Specification. Note: CSEc (Security) or EEPROMwrites/erase willtrigger error flags in HSRUN mode (112 MHz) because this use case is not allowed to execute simultaneously.Thedevice will need to switch to RUN mode (80 MHz) to execute CSEc(Security) or EEPROM writes/erase.– 128-bit Unique Identification (ID) number– Error-Correcting Code (ECC) on flash and SRAM memories– System Memory Protection Unit (System MPU)– Cyclic Redundancy Check (CRC) module– Internal watchdog (WDOG)– External Watchdog monitor (EWM) module• Timing and control– Up to eight independent 16-bit FlexTimers (FTM) modules, offering up to 64 standard channels (IC/OC/PWM)– One 16-bit Low Power Timer (LPTMR) with flexible wake up control– Two Programmable Delay Blocks (PDB) with flexible trigger system– One 32-bit Low Power Interrupt Timer (LPIT) with 4 channels– 32-bit Real Time Counter (RTC)• Package– 32-pin QFN, 48-pin LQFP, 64-pin LQFP, 100-pin LQFP, 100-pin MAPBGA, 144-pin LQFP, 176-pin LQFP packageoptions• 16 channel DMA with up to 63 request sources usingDMAMUXapplications, which include but not limited to:• Exterior and interior lighting• HVAC• Door/Window/Wiper/Seat controller• BLDC/PMSM motor control• Park assistant• E-shifter• TPMS• Real time control in infotainment system• Battery management system• Human machine interface such as touch sense control • Secured vehicle data transfer• Safety controller• Over the air update图1:S32K14x系列高级架构框图图2:S32K11x系列高级架构框图。
RISC-V MCU的FreeRTOS移植与应用开发

4M i c r o c o n t r o l l e r s &E m b e d d e d S ys t e m s 2021年第1期w w w .m e s n e t .c o m .c nR I S C V M C U 的F r e e R T O S 移植与应用开发付元斌,张爱华,何小庆(北京麦克泰软件技术有限公司,北京100085)摘要:具有相同的R I S C V 指令集的处理器实现并不相同㊂本文将针对基于R I S C V 开源指令集的处理器芯片G D 32V F 103M C U ,介绍F r e e R T O S 在I A R E WR I S C V 编译和开发环境下的移植过程㊂采用R T O S 后,嵌入式系统很难监控系统的运行时行为㊁发现应用存在的问题,本文基于T r a c e a l y z e r 分析工具直观地跟踪系统行为,分析系统中可能的错误,提高代码的鲁棒性㊂关键词:B u m b l e b e e 内核;T r a c e a l yz e r ;F r e e R T O S 移植;R I S C V 处理器中图分类号:T P 316.2 文献标识码:AP o r t i n g a n d A p p l i c a t i o n D e v e l o pm e n t o f F r e e R T O S B a s e d o n R I S C V M C U F u Y u a n b i n ,Z h a n g A i h u a ,H e X i a o q i n g(B e i j i n g M i c r o t e c R e s e a r c h S o f t w a r e T e c h n o l o g y C o .L t d .,B e i j i n g 100085,C h i n a )A b s t r a c t :P r o c e s s o r i m p l e m e n t a t i o n s w i t h t h e s a m e R I S C V i n s t r u c t i o n s e t a r e n o t t h e s a m e .T h i s p a p e r w i l l i n t r o d u c e t h e m i gr a t i o n p r o c e s s o f F r e e R T O S u n d e r I A R E WR I S C V e n v i r o n m e n t f o r t h e p r o c e s s o r c h i p G D 32V F 103b a s e d o n R I S C V o p e n s o u r c e i n s t r u c -t i o n s e t .W i t h t h e R T O S ,i t i s d i f f i c u l t t o m o n i t o r t h e r u n t i m e b e h a v i o r o f t h e s y s t e m a n d f i n d p r o b l e m s i n t h e a p pl i c a t i o n .T h i s a r t i c l e w i l l u s e t h e T r a c e a l y z e r a n a l y s i s t o o l t o v i s u a l l y s y s t e m b e h a v i o r ,a n a l y z e p o s s i b l e e r r o r s i n t h e s y s t e m ,a n d i m pr o v e t h e r o b u s t n e s s o f t h e c o d e .K e yw o r d s :B u m b l e b e e K e r n e l ;T r a c e a l y z e r ;F r e e R T O S p o r t i n g ;R I S C V M C U 0 引 言R I S C V 是基于精简指令集(R I S C )原则的开源指令集架构(I S A ),具有良好的应用前景㊂目前R I S C V 架构的处理器陆续发布,其生态环境及应用也在不断丰富,但相对于A R M 架构,R I S C V 的应用还处于起步阶段,复杂的应用需要R T O S 支撑㊂目前许多R T O S ,如μC /O SI I I ㊁F r e e R T O S ㊁R T T h r e a d ㊁Z e p h y r O S ㊁e m b O S 等,都提供了对R I S C V 处理器的支持㊂采用了R T O S 后,传统的调试手段很难监控系统的实时行为,在R T O S 上进行开发时需要额外的工具和方法验证你的软件行为,提高代码的可靠性㊂本文使用兆易创新的G D 32V F 103V E V A L 开发板,基于I A R E W R I S C V 编译和开发环境,介绍如何将F r e e R T O S移植到G D 32V F 103上,并使用P e r c e p i o 的T r a c e a l y z e r 工具分析基于F r e e R T O S 的应用程序运行时行为㊂1 G D 32V F 103R I S C V M C UG D 32V F 103R I S C V M C U 基于N u c l e i B u m b l e b e e内核,芯片提供了108MH z 的主频,以及16~128K B 的片上闪存和6~32K B 的S R AM ,具有多个通用定时器和多通道D MA 控制器㊂G D 32V F 103M C U 的中断控制器(E C L I C )提供了多达68个外部中断并可嵌套16个可编图1 G D 32V F 103V E V A L 评估板程优先级,G D 32V F 103M C U 支持多种外设如U A R T ㊁S P I ㊁I 2C ㊁G P I O 等㊂GD 32V F 103VE V A L 评估板(见图1)使用G D 32VF 103V B T 6作为主控制器,板载J T A G接口以及丰富的外设资源㊂R T O S 在G D 32V F 103上的移植仅使用了内核相关的资源㊂N u c l e i B u m b l e b e e 内核支持R V 32I MA C 指令集架构;特权模式支持机器模式和用户模式,可以实现R T O S 与应用的隔离,提升软件安全;寄存器组包含32个通用寄存器㊁R I S CV 标准的状态寄存器以及内核自定义敬请登录网站在线投稿(t o u g a o.m e s n e t.c o m.c n)2021年第1期5的C S R寄存器㊂内核提供了计时器单元(T i m e r U n i t, T I M E R),产生的计时器中断和软件中断可以用于R T O S 时钟节拍处理和任务切换㊂B u m b l e b e e内核支持在R I SC V标准C L I C基础上优化而来的改进型内核中断控制器(E n h a n c e d C o r e L o c a l I n t e r r u p t C o n t r o l l e r,E C L I C),用于管理所有的中断源㊂E C L C的每个中断源可以配置为向量或非向量处理模式㊂向量模式中断被处理器内核响应后,处理器直接跳入该中断的向量入口存储的目标地址;非向量模式中断被处理器响应后,处理器直接跳入所有中断共享的入口地址㊂但中断响应时,处理器硬件不会保存上下文,需要软件实现㊂2F r e e R T O S和T r a c e a l y z e r介绍F r e e R T O S是英国人R i c h a r d B a r r y2003年发布的开源实时内核㊂F r e e R T O S支持超过35种C P U架构,是世界最受开发者欢迎的R T O S,在2017年每3分钟就有一次下载㊂F r e e R T O S有一个系列软件,包括F r e e R T O S(开源版本)㊁O p e n R T O S(授权版本)㊁S A F E R T O S(安全版本)和A m a z o n F r e e R T O S(开源物联网操作系统),开源的F r e e R T O S遵循M I T l i c e n s e模式㊂在多线程软件系统中,R T O S带来的复杂度让源代码和运行时行为的关联变得不那么明显,传统的调试器不足以理解系统的行为,特别是运行时行为㊂P e r c e p i o的T r a c e a l y z e r工具运行在W i n d o w s或L i n u x P C上,可用于目标系统运行L i n u x㊁F r e e R T O S㊁O p e n R T O S㊁S A F E R T O S㊁W i n d R i v e r V x W o r k s㊁μC/O SI I I和e m b O S的R T O S应用行为分析㊂2.1F r e e R T O S的功能F r e e R T O S支持抢占和时间片轮询两种任务调度方式,支持无限数量的应用任务;提供队列㊁信号量㊁互斥信号量㊁事件标志等内核机制,满足任务间同步及通信需求;此外,针对低功耗应用提供了t i c k l e s s模式㊂最新版本F r e e R T O S提供了针对I A R及G C C工具链的标准R I S C V处理器内核移植示例,支持32位及64位架构内核(R V32I和R V64I)㊂它包含了预配置的O p e n I S A V E G-A b o a r d㊁S i F i v eH i F i v e开发板㊁Q E MU模拟器以及用于M i c r o c h i p M2G L025开发板的A n t m i c r o R e n o d e模拟器示例,可以扩展支持任何RI S C V处理器,但因为每种R I S C V处理器在微架构实现上的不同,需要有移植的工作㊂2.2T r a c e a l y z e r分析工具T r a c e a l y z e r软件工具能够快速㊁轻松地收集多任务软件有用和有意义的行为,可以快速集成到现有的开发环境,通过快照模式或流模式采集系统运行时数据㊂T r a c e-a l y z e r提供超过30种视图可视化R T O S运行时行为,视图间以直观的方式相互关联,洞察运行时行为(包括任务运行时间信息㊁各任务之间的通信流㊁C P U的使用率等),帮助开发人员解决问题,提高软件的可靠性,改善软件的性能㊂3F r e e R T O S移植到G D32V F103M C UF r e e R T O S内核绝大部分都采用C语言编写,只有与处理器相关的上下文切换采用汇编语言实现,目的是保证上下文切换的效率㊂将F r e e R T O S移植到G D32V F103 M C U上的关键要点是实现以下4个步骤:开启和关闭中断的方式;进入和退出临界区的方式;产生周期性的中断作为系统的时钟节拍;任务的上下文切换㊂3.1中断管理和临界区实现代码的临界区也称为代码的临界段,这部分代码在执行时不允许被打断㊂F r e e R T O S的临界区通过关中断来实现,在进入临界段之前须关中断,而临界段代码执行完毕后要立即开中断㊂G D32V F103M C U的E C L I C中断控制器有一个中断目标阈值级别寄存器(m t h),可以实现部分中断屏蔽,优先级别低于该阈值的中断将不会被响应㊂在移植F r e e R T O S时,通过设置m t h来实现开关中断,对于优先级别比阈值高的中断则不受F r e e R T O S管理,中断不存在额外的延迟㊂3.2系统时钟节拍支持操作系统需要一个时钟节拍,以实现系统的延时㊁超时等与时间相关的处理㊂时钟节拍是特定的周期性中断,中断的周期就是节拍的时间㊂节拍的时间长短根据实际应用决定,时钟节拍的频率越高,系统的开销就越大㊂R I S C V架构定义了一个64位宽度的m t i m e计数器,当m t i m e计数值增加到与m t i m e c m p寄存器预设的值相等时,可以产生中断㊂选择m t i m e计数器来产生系统时钟节拍,根据m t i m e的时钟频率和系统节拍频率算出m t i m e c m p的值,当中断发生后,通过改写m t i m e c m p或者m t i m e的值来清除中断㊂3.3实现上下文切换上下文是某一时间点C P U的寄存器内容,F r e e R T O S 能够正确完成任务调度的关键是上下文切换㊂上下文切换的过程包括:把即将退出运行态的任务的运行现场保存到其任务堆栈;从下一个要运行的任务的堆栈中恢复它的运行现场㊂上下文切换的时间应尽可能短,一般由汇编代码编写,作为操作系统移植的一部分㊂上下文切换分为任务级别及中断级别的切换㊂上下文切换的代码通常放在异常处理程序中,该异常的优先级别应设置为最低㊂在R I S C V架构的处理器上,能够用来作为任务切6M i c r o c o n t r o l l e r s &E m b e d d e d S ys t e m s 2021年第1期w w w .m e s n e t .c o m .c n换的异常有两种:e c a l l 异常和软件中断㊂e c a l l 异常通过调用e c a l l 指令来触发;软件中断通过往m s i p 寄存器写 1 触发,写 0 清除㊂G D 32V F 103的软件中断连接到E C L I C 单元进行统一管理㊂我们实现的F r e e R T O S 移植选用软件中断作为上下文切换的实现机制㊂3.4 移植文件修改F r e e R T O S 与处理器相关的移植代码存储在p o r t -m a c r o .h ㊁po r t A S M.s 和p o r t .c 三个文件当中㊂p o r t m a c -r o .h 头文件定义了F r e e R T O S 使用的数据类型㊁进入和退出临界区的宏㊁实现开关中断的宏,以及触发和清除软件中断的宏㊂po r t A S M.s 中用汇编语言实现v P o r t S t a r t F i r s t T a s k ()函数,用于启动第一个任务,它的核心操作是从p x C u r r e n t -T C B 中取出当前就绪任务中优先级最高任务的堆栈指针S P ,通过S P 恢复寄存器现场㊂此外,实现软件中断的服务函数e c l i c _m s i p _h a n d l e r ()将当前的寄存器现场(通用寄存器x 1㊁x 5~x 31,机器模式状态寄存器m s t a t u s 以及机器模式异常P C 寄存器m e p c )保存到当前在运行任务的堆栈当中,然后从p x C u r r e n t T C B 取出下一个就绪中优先级最高任务的堆栈指针S P 恢复寄存器现场,完成任务的上下文切换㊂po r t .c 文件中重点实现堆栈初始化函数p x P o r t I n i t i a -l i s e S t a c k ()㊁启动F r e e R T O S 调度器特定的处理函数x P o r t S t a r t S c h e d u l e r ()㊁系统时钟节拍定时器初始化函数v P o r t S e t u p T i m e r I n t e r r u pt (),以及系统时钟节拍中断服务函数x P o r t S y s T i c k H a n d l e r ()㊂这几个函数分别需要根据R I S C V 架构和G D 32V F 103M C U 硬件特性来实现其功能㊂3.5 移植测试和验证验证移植采用调试和借助相应的辅助工具来进行,使用I A R E WR I S C V 建立项目,在代码中创建两个用户任务进行调试,代码调试时需要验证:①通过在系统时钟节拍I S R 和软件中断I S R 中添加断点,结合R I S C V 的m t i m e 和m c y c l e 寄存器验证系统时钟节拍正确产生,且软件中断能够正常触发㊂②启动第一个任务时,通过添加断点查看从任务堆栈中恢复的寄存器内容是否与堆栈初始化时写入的内容一致,从而测试p x P o r t I n i t i a l i s e S t a c k ()和v P o r t S t a r t F i r s t -T a s k()函数的工作正确性㊂③在执行任务上下文切换时,在软件中断服务程序中添加断点,单步执行,同时通过E WR I S C V 的m e m o r y 观察窗口查看压栈到当前任务堆栈中的内容是否与对应的寄存器内容相同;在恢复下文时,检查从下一个执行任务堆栈中恢复的寄存器内容是否与堆栈中的一致㊂验证e c l i c _m s i p_h a n d l e r ()软件中断服务函数的上下文切换正确性㊂④启动第一个任务和任务上下文切换的代码验证能正常工作,移植的F r e e R T O S 已可以实现基本的任务调度,接着再继续测试开关中断操作和临界区是否正常㊂测试开关中断需要增加另外一个外设中断,将其优先级别分别设置大于或小于m t h 阈值进行测试,代码中手动调用开关中断操作A P I ,检测中断触发是否与设计的模式一致,验证F r e e R T O S 对中断的控制㊂采用同样的方法测试进入和退出临界区㊂⑤通过F r e e R T O S 系统服务调用测试,测试系统的各项服务(如信号量㊁消息队列㊁事件标志等)是否正常,并测试在受F r e e R T O S 管理的I S R 中发信号㊁消息等操作是否正确㊂基础调试测试都通过之后,已经基本可以验证移植是否成功㊂在此基础上还可以借助额外的工具继续验证,例如通过E WR I S C V 自带的F r e e R T O S 调试插件显示的信息进行确认(如图2所示)㊂图2 E W R I S C V R T O S 调试插件T a s k 窗口4 T r a c e a l yz e r 分析工具的应用4.1 移植跟踪记录器库T r a c e a l yz e r 的跟踪记录器库是运行在嵌入式目标端的一个软件库,与F r e e R T O S 项目集成在一起,负责记录R T O S 在运行时产生的事件㊂记录的事件如果是存储在R AM 中,这种工作方式称为快照模式(S n a p s h o t );如果是通过通信端口实时发送到P C 端软件,则工作在流模式(S t r e a m i n g)㊂跟踪记录器库不依赖于处理器硬件,只需要使用一个高精度的定时器产生时间戳,为记录的事件添加时间信息㊂R I S C V 架构的处理器可以利用内核的m c y c l e 计数器来产生时间戳,m c y c l e 是一个64位的计数器,对C P U 的周期进行计数,所以频率与C P U 时钟相同,精度非常高㊂m c y c l e 由两个32位的寄存器组成,T r a c e a l y z e r 只需要使用低32位寄存器㊂在t r c H a r d w a r e P o r t .h 中定义G D 32V F 103的时间戳实现接口:#d e f i n e T R C _HW T C _T Y P E T R C _F R E E _R U N N I N G _32B I T _I N -C R#d e f i n e T R C _HWT C _C O U N T r e a d _c s r (m c yc l e )#def i n e T R C _HWT C _P E R I O D 0敬请登录网站在线投稿(t o u ga o .m e s n e t .c o m.c n )2021年第1期7#d e f i n e T R C _HWT C _D I V I S O R 4#d e f i n e T R C _HWT C _F R E Q _H Z T R A C E _C P U _C L O C K _H Z #d e f i n e T R C _I R Q _P R I O R I T Y _O R D E R 1T r a c e a l y z e r 也需要实现临界区,防止在记录事件时发生任务切换,导致产生错误㊂实现是通过关中断,可以直接使用F r e e R T O S 的关中断机制在t r c K e r n e l P o r t .h 中实现临界区的宏接口:#d e f i n e T R A C E _A L L O C _C R I T I C A L _S E C T I O N ()i n t __i r q _s t a t u s;#d e f i n e T R A C E _E N T E R _C R I T I C A L _S E C T I O N ()__i r q _st a -t u s =p o r t S E T _I N T E R R U P T _MA S K _F R OM _I S R ();#d e f i n e T R A C E _E X I T _C R I T I C A L _S E C T I O N ()po r t C L E A R _I N T E R R U P T _MA S K _F R OM _I S R (__i r q_s t a t u s );以上是将T r a c e a l yz e r 跟踪记录器库移植到一款处理器上需要做的工作㊂4.2 跟踪并分析F r e e R T O S 应用将T r a c e a l yz e r 跟踪记录器库添加到E WR I S C V 的F r e e R T O S 项目中,并进行必要的配置,工作在快照模式㊂在应用代码中创建4个任务,分别为L e d 1T a s k~L e d 3T a s k ㊁B u t t o n T a s k ,任务优先级依次递增,程序运行一段时间,将快照数据通过E WR I S C V 保存成H e x 文件并加载到P C 端的T r a c e a l yz e r 中进行分析㊂如图3所示,通过水平时间轴视图查看各个任务的执行情况:每个任务或中断占一行,从左向右为时间轴的方向,行中有色矩形为该任务或中断的一次执行实例㊂由时间轴窗口可以快速地预览整个运行过程中系统的执行情况,放大窗口的时间分辨率之后可以仔细了解任务执行时相关的内核事件和时间信息㊂图3 T r a c e a l yz e r 水平时间轴视图4.3 任务的时间量分析R T O S 的任务或者中断称为参与者(A c t o r),参与者的一次执行称为实例㊂分析任务的执行通常需要了解如下几种时间:起始和结束时间,参与者实例的开始和结束时间;执行时间,参与者实例使用的C P U 时间量,不包括抢占;响应时间,从参与者实例开始到结束的时间(更确切地说,任务的响应时间是从任务开始准备就绪时计算的,即内核将任务的调度状态设置为就绪的时间);等待时间,图4所示实例中参与者实际没有执行的时间,计算方式为[(结束时间开始时间)(执行时间)];启动时间,从任务就绪到开始执行之间的这段时间㊂图4 F r e e R T O S 分析基础实例的时间关系(场景2发生了抢占)以L e d 3T a s k 的第38个实例(如图5所示)为例,等待时间为从任务就绪到任务代码开始执行的这段时间,时长为7μs ,因为该实例未发生被抢占的情况,所以这7μs 的时间是完成任务上下文切换所需的时间㊂图5 L e d 3T a s k 任务实例38的时间量通过跟踪到的事件和记录的时间戳信息,T r a c e a l yz e r 能够生成多种视图来观测系统运行时存在的问题,例如设计缺陷导致的线程饥饿㊁死锁等,以及发现系统中不必要的延迟,帮助开发者解决系统的问题,提高嵌入式系统的实时性㊂这些问题使用传统调试手段难以发现,而且效率不高㊂5 结 语本文介绍了基于R I S C V 指令集的微控制器G D 32V F 103在I A R E W R I S C V 工具链上移植F r e e R T O S的过程,以及对移植的系统进行验证的方法㊂在此基础上移植T r a c e a l y z e r 跟踪记录器库,并通过跟踪F r e e R T O S 系统运行进一步观测系统的运行,并对任务的执行进行了分析㊂嵌入式与物联网是R I S CV 最活跃的应用市场,R I S C V 给嵌入式系统开发带来许多优势,越来越多的开发者开始尝试R I S C V ㊂以上工作对于基于R T O S 技术的R I S C V 嵌入式开发与应用会有所帮助㊂参考文献[1]芯来科技.B u m b l e b e e 内核指令架构手册[E B /O L ].[202009].h t t p s ://w w w.r i s c v m c u .c o m /qu i c k s t a r t q u i c k s t a r t i n d e x u p d f i d 8.h t m l .2626M i c r o c o n t r o l l e r s &E m b e d d e d S ys t e m s 2021年第1期w w w .m e s n e t .c o m .c n在D C A S E 2019测试集和U r b a n S o u n d 8K 测试集上,模型的识别精度如表1和表2所列,并且与一些最新的方法进行了对比㊂表1 精度比较(D C A S E 2019)模 型测试精度(D C A S E )A u d i o R e s n e t80.2%R e s N e t l i k e m o d e l [14]76.6%B a s e l i n e s ys t e m [15]62.5%表2 与其他方法的精度比较模 型测试精度(U r b a n S o u n d 8K )A u d i o R e s n e t76.4%U n s u p e r v i s e d f e a t u r e l e a r n i n g[16]73.6%B a s e l i n e s ys t e m [17]68%从表中可以看到,与其他先进的分类方法相比,本文提出的A u d i o R e s ne t 模型在分类精度上有较大提高㊂4 结 语本文针对声源目标分类中小样本训练时分类模型性能不佳的问题,使用深度学习方法对不同声源发出的声音数据进行分类,使用l o g me l 声谱图特征作为特征预提取方法,采用基于R e s n e t 网络结构的分类模型对预提取特征数据进行分类处理,建立了识别效果良好的深度学习声信号分类模型A u d i o R e s n e t ㊂该模型性能在D C A S E 2019和U r b a n S o u n d 8K 数据集上得到了验证,实现了良好的效果,在声源探测领域具有一定的工程应用价值㊂参考文献[1]I S N A R D V ,C HA S T R E S V ,V I A U DD E L MO N I ,e t a l .T h e t i m e c o u r s e o f a u d i t o r y r e c o g n i t i o n m e a s u r e d w i t h r a pi d s e q u e n c e s o f s h o r t n a t u r a l s o u n d s [J ].S c i e n t i f i c R e po r t s ,2019,9(1):8005.[2]樊新海,石文雷,张传清.基于V M D 多尺度熵和A B C S V M 的装甲车辆识别[J ].装甲兵工程学院学报,2018,32(6):6873.[3]孙国强,樊新海,石文雷.基于M F C C 和支持向量机的装甲车辆识别研究[J ].国外电子测量技术,2017,36(10):3135.[4]R U B E N G O N Z A L E ZH E R N A N D E Z F ,P A S T O RS A N C H E Z F E R N A N D E Z L ,S U A R E Z G U E R R A S ,e ta l .M a r i n e m a mm a l s o u n d c l a s s i f i c a t i o nb a s e d o n a p a r a l l e lr e c o g n i t i o n m o d e l a n d o c t a v e a n a l y s i s [J ].A p pl i e d A c o u s t i c s ,2017(119):1728.[5]S A N C H E Z F E R N A N D E Z L P ,S A N C H E Z P E R E Z L A ,C A R B A J A L H E R N A NDE Z J J ,e t a l .A i r c r a f t C l a s s i f i c a t i o na n d A c o u s t i c I m pa c t E s t i m a t i o n B a s e d o n R e a l T i m e T a k e o f f N o i s e M e a s u r e m e n t s [J ].N e u r a l P r o c e s s i n g Le t t e r s ,2013,38(2):239259.[6]陈心昭.噪声源识别技术的进展[J ].合肥工业大学学报(自然科学版),2009,32(5):609614.[7]竺乐庆,张真.基于M F C C 和GMM 的昆虫声音自动识别[J ].昆虫学报,2012,55(4):466471.[8]石文雷,樊新海,张传清.基于频谱动态特征和C S S VM 的装甲车辆识别[J ].计算机应用,2018,38(S 1):4447,72.[9]董语诗,时浏艺,丁一坤.基于HMM 的声场景分类[J ].信息化研究,2018,44(3):3947,52.[10]中兴通讯采用英特尔F P G A 在深度学习上取得性能突破[J ].单片机与嵌入式系统应用,2017,17(3):88.[11]庞悦,赵威,张雅楠,等.基于深度学习的L S T M 的交通流量预测[J ].单片机与嵌入式系统应用,2019,19(3):7275.[12]王枫,陈小平.C N N 深度学习的验证码识别及A n d r o i d 平台移植[J ].单片机与嵌入式系统应用,2019,19(7):2022,73.[13]P I R O T T A E ,M E R C HA N T N D ,T HOM P S O N P M ,e t a l .Q u a n t i f y i n g th e e f f e c t o f b o a t d i s t u r b a n c e o n b o t t l e n o s e d o l -p h i n f o r a g i n g a c t i v i t y[J ].B i o l C o n s e r v ,2015(181):8289.[14]N g u y e n T ,P e r n k o pf F .A c o u s t i c S c e n e C l a s s i f i c a t i o n w i t h M i s m a t c h e d R e c o r d i ng D e v i c e s U s i n g M i x t u r e o f E x pe r t s L a ye r [C ]//2019I E E E I n t e r n a t i o n a l C o nf e r e n c e o n M u l t i -m e d i a a n d E x po (I C M E ),2019.[15]M e s a r o s A ,H e i t t o l a T ,V i r t a n e n T.A m u l t i d e v i c e d a t a s e tf o r u r b a n a c o u s t i c s c e n e c l a s s i f i c a t i o n [J ].2018,a r X i v :1807.09840.[16]S a l a m o n J ,J a c o b y C ,B e l l o J P .A D a t a s e t a n d T a x o n o m yf o r U r b a n S o u n d R e s e a r c h [C ]//a c m I n t e r n a t i o n a l C o n f e r e n c eo n M u l t i m e d i a ,2014.[17]S A L AMO N J ,J A C O B Y C ,B E L L O J P .A D a t a s e t a n d T a x -o n o m y f o r U r b a n S o u n d R e se a r c h [C ]//p r o c e e d i n gs o f t h e a c m I n t e r n a t i o n a l C o n f e r e n c e o n M u l t i m e d i a ,2014.王鹏程(硕士研究生),主要研究方向为信息探测与处理㊂(责任编辑:薛士然 收稿日期:2020-07-20) [2]胡振波.R I S C V 架构与嵌入式开发快速入门[M ].北京:人民邮电出版社,2019.[3]何小庆.3种物联网操作系统分析与比较[J ].微纳电子与智能制造,2020(3).[4]D A V I D P A T T E R S O N ,A N D R E W W A T E R M A N.R I S CV手册:一本开源指令集的指南,2018.[5]U s i n g Fr e e R T O S o n R I S C V M i c r o c o n t r o l l e r s [E B /O L ].[202009].h t t p s ://w w w.f r e e r t o s .o r g /U s i n g Fr e e R T O S o n R I S C V.h t m l .[6]J i m C o o l i n g .R e a l t i m e O p e r a t i n g S ys t e m s B o o k 2T h e P r a c t i c e [M ].M a r k f i e l d :L i n d e n t r e e A s s o c i a t e s ,2017.(责任编辑:芦潇静 收稿日期:2020-09-10)。
航顺高性能32位MCU系列产品特点及其产品应用介绍

1前言传统的低功耗MCU设计都是以8位MCU为主,因为8位内核阈门相对较少,运行或泄露电流低,售价也相对低廉。
但是,随着物联网、5G、云计算、大数据以及智慧城市、智慧家庭、智慧园区的应用,8位内处理效率已经不能满足市场需求。
近年来,鉴于以下缘由,32位低功耗MCU得以兴起。
①手持式消费性电子产品与无线功能的需求越来越高、设计越来越复杂,要提高性能的同时又要兼顾低功耗,需要有一高性能低功耗的主控MCU来作为平台。
②工业上的智能化也在展开,如远程监控、数字化、网络化等。
简单说来,就是人物之连结(云端应用)、物物之连结(物联网)需求越来越多,导致产品功能越来越复杂,运算量越来越高,③制程微缩技术的进步,嵌入式闪存制程普及化及降价,主要成本来自内存大小及模拟外围和I/O管脚数量,CPU内核的成本差异已大幅缩短,更促进了高性价比32位低功耗MCU的快速发展。
应该看到,随着集成电路制造技术的不断进步,单个芯片上集成的晶体管越来越多。
这使得大规模集成电路(VLSI)的功耗成为芯片设计的关键问题,尤其是,当工艺发展到深亚微米时,功耗对电路的影响使它成为集成电路设计中必须考虑的因素。
低功耗设计对提高电路可靠性和降低成本有着非常积极的作用。
就数字CMOS电路功耗主要由动态开关功耗、漏电功耗和短路功耗三部分组成,其中动态开关功耗占据了总功耗的绝大部分,因此降低功耗主要通过降低动态开关功耗实现,而降低动态开关功耗又可以通过减小翻转率、减小负载电容和降低芯片供电电压等手段实现。
今天,不管是通用MCU,还是低功耗MCU对于国产MCU产业面临的现实困境,想要在通用MCU 领域和国外企业直面竞争,是非常不现实的。
我们更倾向于在细分领域形成差异化优势,根据客户实际的需求对产品的功能、外围电路、模拟特性等进行定制化设计,以此打开市场。
与此同时,航顺芯片也在加快32位MCU产品系列的扩充,其量产的通用8位MCU(HK32S003XX 家族),32位MCU-M3家族(HK32F103)和M0家族(HK32F030/031)已有近百个单品型号,功耗更低,稳定性可以通过车规级测试标准。
STM32 系列MCU 不同型号的移植步骤解析
STM32系列MCU不同型号的移植!
第一步
更换启动件:
第二步
修改宏定义:
图1
或者修改stm32f10x.h
具体修改如下:
图2
第三步
修改系统主频率:
文件:system_stm32f10x.c
具体修改如下:
图3
第四步
修改外部晶振源:
文件:stm32f10x.h
其中,Project.bin和Project.axf要和Output选项卡中的Nameof
Executable的名字相同
三、如何使用IAP
1、设置超级终端波特率选择为115200
2、需要下载时将Tamper键按住再按下复位键超级终端打印出帮助信息
3、选择下发文件,协议选择Y_modem,选择下发。
延时修改
使用J-Link调试设置
图7
J-Link不能正常连接目标板
可以尝试一下方法(恢复出厂设置)
具体修改如下:
图4
第五步
定时器需要根据以上修改的系统主频率进行对应的修改。
其他:
修改Flash地址
文件:misc.h
具体修改如下:
图5
与以下配置一致:
IAP设置步骤
一、IAP工程设置
1、修改main中的按键触发键
2、修改下载串口
二、下载工程设置
1、修改程序入口地址
查找NVIC_VectTab_FLASH将其修改为:0x08002000
2、修改options
1)打开Target选项卡在IROM1中将Start和Size分别修改为
0x08002000和0x3E00
2)打开User选项卡在RunUserProgramsBeforeBuild/Rebuild中,勾选
基于STM32单片机的uCOS-II操作系统移植

第6期2020年12月机电元件ELECTROMECHANICALCOMPONENTSVol 40No 6Dec 2020收稿日期:2020-10-20基于STM32单片机的uC/OS-II操作系统移植张中前(贵州航天电器股份有限公司,贵州贵阳,550009) 摘要:网络技术和信息技术的发展,嵌入式系统应用越来越普及,嵌入式设备的应用也越来越多。
uC/OS-II广泛应用于路由器、飞行器及工业控制等。
uC/OS-II操作系统执行效率高,占用存储空间少,具有实时性及可扩展性等优点,在小型嵌入式设备中具有广泛应用。
本文介绍了基于ARMCORTEXM3系列单片机上的uC/OS-II移植,对电子控制组件的设计具有参考作用。
关键词:实时操作系统;uC/OS-II;内存管理;任务管理;STM32;移植Doi:10.3969/j.issn.1000-6133.2020.06.015中图分类号:TN784 文献标识码:A 文章编号:1000-6133(2020)06-0057-051 引言操作系统是裸机的第一层软件,操作系统直接运行在硬件上,上层软件通过提供应用程序接口(API函数),实现对底层硬件的访问,同时,通过操作系统实现对多个上层应用软件(任务)管理,实现对硬件CPU管理、存储管理、I/O接口管理及文件管理,如图1所示。
图1 操作系统功能组成示意图 STM32系列单片机以其优良的价格,大容量的FLASH及RAM存储空间,极易用于较为复杂的控制系统;在STM32单片机上进行uC/OS-II实时操作系统的移植,提高了产品的设计灵活性,实现较为复杂的系统功能;通过将开源的uC/OS-II移植在STM32单片机上,以其较为低廉的硬件成本获得较高的使用性能,具有良好的应用前景。
2 uC/OS-II操作系统2.1 uC/OS-II操作系统的基本特征uC/OS-II是一个完整的、可移植、可固化、可剪裁的基于优先级调度的抢占式实时多任务操作系统;它能够在外界事件或数据产生时,能够接收图2 uC/OS-II文件结构示意图并以足够快的速度响应,其处理的结果又能够在规定的时间内输出,并控制所有实时任务协调、一致运行。
嵌入式3级选择题7解读
1.下列产品中不属于嵌入式系统的是:A) 洗衣机B) 空调机C) 个人电脑D) 电子血压计【解析】广义上讲,凡是带有微处理器的专用软硬件系统都可称为嵌入式系统。
狭义上讲,嵌入式系统强调那些使用嵌入式微处理器构成的具有自己的操作系统和特定功能、用于特定场合的独立系统。
嵌入式系统以应用为中心、以计算机技术为基础、软硬件可裁剪、功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
包括洗衣机、空调机等"白色家电",也包括心电计、血压计等医疗电子设备;而个人电脑(PC机)不属于嵌入式系统。
所以本题选C。
2.下面关于嵌入式系统的叙述中,错误的是A) 嵌入式系统所涉及的应用领域非常广泛B) 嵌入式系统在数量上远远超过了各种类型的通用计算机系统C) 嵌入式系统与通用计算机都是由硬件和软件两部分组成的D) 嵌入式系统正在逐步取代通用计算机系统【解析】嵌入式系统与通用计算机一样,也是由硬件和软件两部分组成,所涉及到的领域非常广泛,在应用数量上远远超过了各种类型的通用计算机系统。
尽管如此,嵌入式系统与日常使用的通用计算机系统仍有许多不同之处,它们的组成及功能都各有特点,所以各自的市场不同,谈不上取代。
所以本题选D。
3. 数码相机是一种典型的嵌入式系统,下面有关其软硬件组成的叙述中错误的是:A) 它由硬件和软件两部分组成B) 硬件部分既包括CPU,也包括存储器和输入/输出C) 使用闪存卡(如CF卡、SD卡等)作为内存,用于存储所运行的软件D) 软件部分既包括操作系统,也包括应用软件【解析】数码相机是嵌入式系统的典型应用之一。
它由前端和后端两部分组成,前端负责数字图像获取,后端负责数字图像的处理,后端通常是以嵌入式DSP作为核心的SoC芯片,DSP用于完成数字图像处理;此外,数码相机中还有一个超低功耗的8位MCU,负责进行操作控制;高端数码相机配置有实时操作系统和图像处理软件。
使用的闪存卡主要是用来存储照片而不是系统软件。
EFM32系列32位MCU的GPIO配置,读取-写入,外设功能

EFM32 系列32 位MCU 的GPIO 配置,读取/写入,
外设功能
本文主要针对Silicon Labs(亦称芯科科技)EFM32 系列32 位MCU 的GPIO 配置,读取/写入,外设功能,外部中断功能以及GPIO 引脚作为外设
反射系统(PRS)等功能进行概要描述。
与此相关的功能演示可以在Silicon Labs 推出的EFM32 入门套件主板上实现。
与通用型MCU 应用类似,EFM32 系列每个端口最多容纳16 个引脚,命名规则为Pxn,其中x 表示端口(A,B,C ...),n 表示引脚编号(0,1,...,15),其中每个端口都有独立的寄存器控制单元,用于功能的配置和数据读写等。
GPIO 配置输出端,通过写入DOUT 寄存器中的相应位来驱动引脚,其输出可以配置为线或,开漏或者具有特定驱动属性的推挽式输出。
输入配置,
其输入的引脚状态反映在其对应的DIN 寄存器中,可为每个输入引脚启用可
编程的上拉或下拉功能,另外还有滤波器功能可选,可以抑制长达50 ns 的毛刺。
在实际的应用设计中,为避免意外影响GPIO 的配置,可以按引脚锁
定其GPIO 配置。
另外,针对部分外设线路有上、下拉电阻的配置需求,这
就需要与MCU GPIO 上、下拉功能的协调使用。
EFM32 系列的三个典型寄存器配置:GPIO_Px_MODEL(端口引脚0-7)或GPIO_Px_MODEH(端口引脚8-15),GPIO_Px_DOUT 和。
NXP LPC55S16 32位ARM MCU嵌入应用开发方案

NXP公司的LPC55S1x/LPC551x是基于32位ARM Cortex-M33内核的微处理器(MCU),包括CASPER加密引擎,多达256KB片上闪存,多达96KB片上SRAM,用于实时闪存加密/解密的PRINCE模块,代码看门狗,高速/全速USB主和设备接口,CANFD,五个通用计时器,一个SCTimer/PWM,一个RTC/告警计时器,一个24位多速率计时器(MRT),看门狗计时器(WWDT),九个灵活串行通信外设(可配置成USART, SPI,高速SPI, I2C或I2S接口),可编逻辑单元(PLU),一个16位2.0 MSPS ADC.ARM Cortex-M33核(r0p4)运行频率高达150MHz,集成了数字信号处理(DSP)指令,以及TrustZone®,浮点单元(FPU)和存储器保护单源(MPU),ARM Cortex M33内置了嵌套向量中断控制器(NVIC).为了支持所需的安全,LPC55S1x/LPC551x还支持安全引导, HASH, AES, RSA, UUID,动态加密和解密,调试认证和TBSA兼容.工作电压1.8V-3.6V,工作温度- 40 C 到 +105 C.主要用在工业,消费类电子和汽车市场等低功耗强功能的嵌入解决方案.本文介绍了LPC55S1x/LPC551x主要优势和特性,框图,以及开发板LPC55S16-EVK主要特性,电路图和材料清单.The LPC55S1x/LPC551xis an ARM Cortex-M33 based microcontroller for embedded applications. These devices include CASPER Crypto engine, up to 256 KB on-chip flash,up to 96 KB of on-chip SRAM, PRINCE module for on-the-fly flash encryption/decryption,Code Watchdog, high-speed/full-speed USB host and device interface with crystal-less operation for full-speed, CAN FD, five general-purpose timers, one SCTimer/PWM,one (WWDT), nine flexible serial communication peripherals (which can be configured as a USART, SPI, high speed SPI, I2C, or I2S interface)Programmable Logic Unit (PLU), one 16-bit 2.0 Msamples/sec ADCcapable of simultaneous conversions, comparator, and temperaturesensor .The ARM Cortex-M33 provides a security foundation, offering isolation to protect valuable IP and data with TrustZone® technology. It simplifies the design and software development of digital signal control systems with the integrated digital signal processing (DSP) instructions. To supportsecurity requirements, the LPC55S1x/LPC551x also offers support forsecure boot, HASH, AES, RSA, UUID, dynamic encrypt and decrypt, debug authentication, and TBSA compliance.LPC55S1x/LPC551x主要优势和特性:n ARM Cortex-M33 core (r0p4):u Running at a frequency of up to 150 MHz.u Integrated digital signal processing (DSP) instructions.u TrustZone®, Floating Point Unit (FPU) and Memory Protection Unit(MPU).u Non-maskable Interrupt (NMI) input with a selection of sources.u Serial Wire Debug with eight breakpoints and four watch points. Includes SerialWire Output for enhanced debug capabilities.u System tick timer.n CASPER Crypto co-processor is provided to enable hardware acceleration for various functions required for certain asymmetric cryptographicNXP LPC55S16 32位ARM MCU嵌入应用开发方案algorithms, such as, EllipticCurve Cryptography (ECC).n On-chip memory:u Up to 256 KB on-chip flash program memory with flash accelerator and 512 bytepage erase and write.u Up to 96 KB total SRAM consisting of 16 KB SRAM on Code Bus, 64 KBSRAM on System Bus (64 KB is contiguous), and additional 16 KB USBSRAM on SystemBus which can be used by the USB interface or for general purpose use.n PRINCE module for real-time encryption of data being written to on-chip flash and decryption of encrypted flash data during read to allow assetprotection, such assecuring application code, and enabling secure flashupdate.n On-chip ROM bootloader supports:u Booting of images from on-chip flashu Supports CRC32 image integrity checking.u Supports flash programming through In System Programming (ISP)commandsover following interfaces: USB0/1 interfaces using HID Classdevice, UARTinterface (Flexcomm 0) with auto baud, SPI slave interfaces(Flexcomm 3 or 8)using mode 3 (CPOL = 1 and CPHA = 1), and I2C slave interface (Flexcomm 1)u ROM API functions: Flash programming API, Power control API, andSecurefirmware update API using NXP Secure Boot file format, version 2.0 (SB2 files).u Supports booting of images from PRINCE encrypted flash regions.u Support NXP Debug Authentication Protocol version 1.0 (RSA-2048) and 1.1(RSA-4096).u Supports setting a sealed part to Fault Analysis mode throughDebugauthentication.n Secure Boot support:u Uses RSASSA-PKCS1-v1_5 signature of SHA256 digest ascryptographicsignature verification.u Supports RSA-2048 bit public keys (2048 bit modulus, 32-bit exponent). u Supports RSA-4096 bit public keys (4096 bit modulus, 32-bit exponent). u Uses x509 certificate format to validate image public keys.u Supports up to four revocable Root of Trust (RoT) or Certificate Authority keys,Root of Trust establishment by storing the SHA-256 hash digest of the hashes offour RoT public keys in protected flash region (PFR).u Supports anti-rollback feature using image key revocation and supports up to 16Image key certificates revocations using Serial Number field inx509 certificate.n Serial interfaces:u Flexcomm Interface contains up to nine serial peripherals (FlexcommInterface 0-7 andFlexcomm Interface 8). Each Flexcomm Interface (except flexcomm 8, whichis dedicated for high-speed SPI) can be selected bysoftware to be a USART, SPI,I2C, and I2S interface.Each Flexcomm Interface includes a FIFO that supportsUSART, SPI, and I2S.A variety of clocking options are available to each FlexcommInterface,including a shared fractional baud-rate generator, and time-outfeature.Flexcomm interfaces 0 to 5 each provide one channel pair of I2S andFlexcomm interfaces 6 to 7 each provide four channel pairs of I2S.u I2C-bus interfaces support Fast-mode and Fast-mode Plus with data rates of up to 1Mbit/s and with multiple address recognition and monitor mode. Two sets of trueI2C pads also support high-speed Mode (3.4 Mbit/s) as a slave.u USB 2.0 full speed host/device controller with on-chip PHY and dedicated DMA controller supporting crystal-less operation in device mode usingsoftware library example in technical note (TN00065).u USB 2.0 high-speed host/device controller with on-chip high-speed PHY. n Digital peripherals:u DMA0 controller with 23 channels and up to 22 programmable triggers, able toaccess all memories and DMA-capable peripherals.u DMA1 controller with 10 channels and up to 15 programmable triggers, able toaccess all memories and DMA-capable peripherals.u CAN FD module with dedicated DMA controlleru CRC engine block can calculate a CRC on supplied data using one ofthreestandard polynomials with DMA support.u Up to 64 General-Purpose Input/Output (GPIO) pins.u GPIO registers are located on the AHB for fast access. The DMA supports GPIOports.u Up to eight GPIOs can be selected as pin interrupts (PINT), triggered by rising,falling or both input edges.u Two GPIO grouped interrupts (GINT) enable an interrupt based on alogical(AND/OR) combination of input states.u I/O pin configuration with support for up to 16 function options.u Programmable Logic Unit (PLU) to create small combinatorial and/orsequentiallogic networks including state machines.n Security Features:u ARM TrustZone® enabled.u AES-256 encryption/decryption engine with keys fed directly from PUF or asoftware supplied keyu Secure Hash Algorithm (SHA2) module supports secure boot withdedicated DMA controller.u Physical Unclonable Function (PUF) using dedicated SRAM for siliconfingerprint. PUF can generate, store, and reconstruct key sizes from 64 to 4096 bits. Includeshardware for key extraction.u True Random Number Generator (TRNG).u 128 bit unique device serial number for identification (UUID).u Secure GPIO.u Code Watchdog for detecting code flow integrity.n Timers:u Five 32-bit standard general purpose asynchronous timers/counters,which support up to four capture inputs and four compare outputs, PWM mode, and externalcount input. Specific timer events can be selected to generate DMA requests.u One SCTimer/PWM with 8 input and 10 output functions (including 16 capture andmatch registers). Inputs and outputs can be routed to or from external pins andinternally to or from selected peripherals. Internally, the SCTimer/PWM supports 16captures/matches, 16 events, and 32 states.u 32-bit Real-time clock (RTC) with 1 s resolution running in the always-on powerdomain.Another timer in the RTC can be used for wake-up from all low powermodes including deep power-down, with 1 ms resolution. The RTC is clocked bythe 32 kHz FRO or 32.768 kHz external crystal.u Multiple-channel multi-rate 24-bit timer (MRT) for repetitive interrupt generation atup to four programmable, fixed rates.u Windowed Watchdog Timer (WWDT) with FRO 1 MHz as clock source. u Code Watchdog for detecting code flow integrity.u The Micro-Tick Timer running from the watchdog oscillator can be used to wake-up the device from sleep and deep-sleep modes. Includes 4capture registers with pininputs.u 42-bit free running OS Timer as continuous time-base for the system,available in any reduced power modes.It runs on 32 kHz clock source, allowing a count periodof more than 4 years. n Analog peripherals:u 16-bit ADC with five differential channel pair (or 10 single-endedchannels), andwith multiple internal and external trigger inputs and sample rates of up to 2.0MSamples/sec. The ADC support simultaneousconversions, on 2 ADC inputchannels belonging to a differential pair.u Integrated temperature sensor connected to the ADC.u Comparator with five input pins and external or internal referencevoltage.n Clock generation:u Internal Free Running Oscillator (FRO). This oscillator provides aselectable 96MHz output, and a 12 MHz output (divided down from theselected higherfrequency) that can be used as a system clock. The FRO is trimmed to +/- 2%accuracy over the entire voltage and temperature range. u 32 kHz Internal Free Running Oscillator FRO. The FRO is trimmed to +/- 2%accuracy over the entire voltage and temperature range.u Internal low power oscillator (FRO 1 MHz) trimmed to +/- 15% accuracy over theentire voltage and temperature range.u Crystal oscillator with an operating frequency of 12 MHz to 32 MHz.Option forexternal clock input (bypass mode) for clock frequencies of up to 25 MHz.u Crystal oscillator with 32.768 kHz operating frequency.u PLL0 and PLL1 allows CPU operation up to the maximum CPU rate without theneed for a high-frequency external clock. PLL0 and PLL1 can run from the internalFRO 12 MHz output, the external oscillator, internal FRO 1 MHz output, or the32.768 kHz RTC oscillator.u Clock output function with divider to monitor internal clocks.u Frequency measurement unit for measuring the frequency of any on-chip oroff-chip clock signal.u Each crystal oscillator has one embedded capacitor bank, where each canbe usedas an integrated load capacitor for the crystal oscillators. Using APIs, the capacitorbanks on each crystal pin can tune the frequency for crystals with a CapacitiveLoad (CL) leading to conserving board space and reducing costs.n Power-saving modes and wake-up:u Integrated PMU (Power Management Unit) to minimize power consumption.u Reduced power modes: Sleep, deep-sleep with RAM retention, power-down with RAM retention and CPU retention, and deep power-down with RAM retention.u Configurable wake-up options from peripherals interrupts.u The Micro-Tick Timer running from the watchdog oscillator, and the Real-TimeClock (RTC) running from the 32.768 kHz clock, can be used to wake-up thedevice from sleep and deep-sleep modes.u Power-On Reset (POR) (around 0.8 V).u Brown-Out Detectors (BOD) for VBAT_DCDC with separate thresholds for forcedreset.n Operating from internal DC-DC converter.n Single power supply 1.8 V to 3.6 V.n JTAG boundary scan supported.n Operating temperature range - 40 C to +105 C.n Available in HLQFP100, VFBGA98, and HTQFP64 packages。
芯海科技 32位MCU系列 产品手册

芯海科技产品手册CHIPSEA PRODUCT MANUAL芯海科技成立于2003年9月,是一家集感知、计算、控制、连接于一体的全信号链集成电路设计企业。
专注于高精度ADC、高可靠性MCU、测量算法以及AIoT 一站式解决方案的研发设计。
产品和方案广泛应用于工业测量与工业控制、通信与计算机、锂电管理、消费电子、汽车电子、智慧家居、智能仪表、智慧健康等领域。
公司总部位于深圳,在合肥、西安、上海、成都设立子公司,是国家级高新技术企业,被广东省科技厅认定为“广东省物联网芯片开发与应用工程技术研究中心”,获得国家级专精特新“小巨人”称号。
建有可靠性检测中心、健康测量实验室、感知实验室、MCU实验室。
公司年均研发投入超过20%,研发人员占比近70%,核心成员均有10年以上工作经验。
截止到2022年上半年,芯海科技累计拥有全球专利申请近800件,累计拥有已授权专利近350件(含美国专利),拥有专利数量在科创板芯片设计上市公司中名列前茅。
企业简介ABOUT CHIPSEA1523健康测量信号调理数据转换器模拟前端32位MCU 8位MCU010406091113信号链无线产品低功耗蓝牙开发生态开发生态鸿蒙智联解决方案OKOK智能物联解决方案健身行业SaaS 解决方案2021221719电源管理AIoT产品快 充电池管理MCUC H I P S E A32位MCU系列产品概述芯海科技的CS32系列32位MCU基于Arm®Cortex®-M处理器,内嵌Flash存储器,集成高精度ADC和丰富的模拟外设。
该产品系列品类齐全,同时保持了集成度高和易于开发的特点,提供了丰富的软件和开发工具支持,广泛应用于工业控制、汽车电子、智能家居、消费类电子等领域。
产品特色典型应用高可靠低功耗高精度32KB64KB 128KB 256KB 512KB 1024KB ��TWS电子烟电表电动自行车扫地机器人无人机C H I P S E A 产品选型C H I P S E AC H I P S E A8位MCU系列产品概述芯海科技的8位MCU采用芯海科技自主知识产权的8位RISC内核,并集成12位ADC、内部基准电压、OTP或Flash存储器、PWM等资源,支持C语言开发,具有低功耗、易开发等特点。
Maxim MAX32625 32位MCU可穿戴应用开发方案

图3 MAX32625评估板框图 --------------- >下转(10)页
5 / 29
解决方案
新品
封面
目录
打印
订阅
< --------------- 上接(5)页 表 MAX32625评估板材料清单
详情: /downloads/en/DeviceDoc/00002242A.pdf /downloads/en/DeviceDoc/50002543A.pdf /downloads/en/DeviceDoc/EVB-USB5806-sch.PDF
MAX32625/MAX32626主要特性
• 可穿戴设备的高效率微控制器 • 内部振荡器工作频率高达96MHz • 低功耗4MHz振荡器系统时钟选项,用于始终监视应用 • 512KB闪存(256KB“L”版本) • 160KB SRAM(128KB“L”版本) • 8KB指令缓存 • 1.2V内核电源电压 • 1.8V~3.3V I/O • 可选3.3V±5%USB电源电压 • 宽工作温度:-30℃~+85℃ • 电源管理最大化电池应用的正常运行时间 • 从缓存执行的106μA/MHz有效电流 • 从闪光灯执行的49μA/MHz有源电流
MAX32625评估板包括
• 带MAX32625或MAX32626微控制器的评估板 • 具有JTAG带状电缆(用于从调试器连接到评估板插座J1)和USB标准A到B电缆(用于从PC到
调试器的连接)的Olimex ARM-USB-TINY-H JTAG调试器 • 标准A至Micro-B USB电缆(用于从PC或独立USB电源连接到评估板USB Micro-B连接
MAX32625评估板(EV kit)为评估MAX32625/MAX32626微控制器的功能提供了方便的 平台。评估板还提供了一个完整的功能系统,非常适合开发和调试应用。
ARM欲借统一架构称霸32位通用MCU市场

“ 认 为 Co t x M3 引 这 些 件 和开 发丁具 上 实现 复用 。 我 re — 吸
比 , 目前 已成 为 MCU厂 商 重 点 关 注 厂 商 的原 因来 自两 方 面 ,”ARM中
“ e — 将 取 Co t x M0 r 代 8 1 ANM7 05 及 。 成 为 市 场 上 主 流 的 低 端 MCU及 ASSP 的 内核 。 ”
这 一 观 点 也 得 到 用 户 的认 可 。
转 向性 能 更 强 的 1 位 或 3 位 MCU产 6 2
进 步 ,相 对 1 位 产 品 ,3 位 MCU可 系统 支 持 6 2
品 。 由于 半 导 体 技 术 与 T 艺 的 飞 速 成 功 的 两 大 法 宝 :性 能 与 产 业 生 态 町以 推 出 不 同 配置 的MCU,覆 盖 从 以实 现 更 高 的性 能 、集 成 度 和 性 价 的对 象 ,业 界 普 遍 认 为 ,随 着 3 位 2
ARM公 司
恩 智 浦 半 导 休 做 控 制 器 产 品 高 级 应
用 经理 土朋 朋 表, ,除 。 J j TARM产 品
取 代 1位 产 品市 场 ,甚 至 蚕食 部 分 8 6
位 MC U领地 。 在 风 风 火 火 的 3 位 M CU市 场 2
背后 ,有 一 个 公 司 不 得 不 提 ,这 就 是 AR 。尽 管 这 家 公 司 自己并 没 有 M
N w E TEc H No L G Y o
用 2 MCU 场 市
说起8 处理器人们首先 就会想 ̄ 8 5 ,采用 MC 一 1 位 J0 1 S 5 架构的产 品一直 占据市场主导 ;而到T3 位时 2 代 ,这 一 地 位 或 将 由ARM取 代 ,该 公 司 的 3 位 CotxM内核 目前 已将 其他 架构 远 远 抛 在 后 面 。 2 r — e
STM32F407 Cortex-M4 32位MCU开发方案

STM32F407 Cortex-M4 32浣峂CU寮€鍙戞柟妗?ST鍏徃鐨凷TM32 F4绯诲垪鏄珮鎬ц兘鐨勫熀浜嶢RM Cortex-M4鐨?2浣嶅井鎺у埗鍣?宸ヤ綔棰戠巼楂樿揪168MHz. Cortex M4鍏锋湁娴偣鍗曞厓(FPU)浣嗙簿搴?鏀寔鎵€鏈夌殑ARM鍗曠簿搴︽暟鎹鐞嗘寚浠ゅ拰鏁版嵁绫诲瀷,鍏锋湁DSP鎸囦护鍜岃嚜閫傚簲鐨勫疄鏃跺姞閫熷櫒(ART),鍏佽浠庨棯瀛樹腑闆剁瓑寰呯姸鎬佸疄鐜?瀛樺偍鍣ㄤ繚鎶ゅ崟鍏冨拰210 DMIPS/1.25 DMIPS/MHz (Dhrystone 2.1).涓昏鐢ㄥ湪椹揪椹卞姩鍜屽簲鐢ㄦ帶鍒?鍖荤枟璁惧,宸ヤ笟搴旂敤濡侾LC,閫嗗彉鍣?鐢佃矾鏂矾鍣?鎵撳嵃鏈哄拰鎵弿浠?鍛婅绯荤粺,HVAC鍜屽搴煶棰戣澶?鏈枃浠嬬粛浜哠TM32F407xx绯诲垪涓昏鐗规€?鏂规鍥句互鍙奡TM3240G-EVAL璇勪及鏉夸富瑕佺壒鎬? 璇勪及鏉跨‖浠跺竷灞€鍜岄厤缃浘, 鍏冧欢甯冨眬鍥惧拰璇︾粏鐢佃矾鍥?The STM32F405xx and STM32F407xx family is based on the high-performance ARM® Cortex™-M4 32-bit RISC core operating at a frequency of up to 168 MHz. The Cortex-M4 core features a Floating point unit (FPU) single precision which supports all ARM single precision data-processing instructions and data types. It also implements a full set of DSP instructions and a memory protection unit (MPU) which enhances application security.The Cortex-M4 core with FPU will be referred to as Cortex-M4F throughout this document.The STM32F405xx and STM32F407xx family incorporates high-speed embedded memories (Flash memory up to 1 Mbyte, up to 192 Kbytes of SRAM), up to 4 Kbytes of backup SRAM, and an extensive range of enhanced I/Os and peripherals connected to two APB buses, two AHB buses and a 32-bit multi-AHB bus matrix.All devices offer three 12-bit ADCs, two DACs, a low-power RTC, twelve general-purpose16-bit timers including two PWM timers for motor control, two general-purpose 32-bit timers.a true random number generator (RNG). They also feature standard and advanced communication interfaces.鈼?Up to three I2Cs鈼?Three SPIs, two I2Ss full duplex. To achieve audio class accuracy, the I2S peripherals can be clocked via a dedicated internal audio PLL or via an external clock to allow synchronization.鈼?Four USARTs plus two UARTs鈼?An USB OTG full-speed and a USB OTG high-speed with full-speed capability (with the ULPI),鈼?Two CANs鈼?An SDIO/MMC interface鈼?Ethernet and the camera interface available on STM32F407xx devices only.The STM32F405xx and STM32F407xx family operates in the –40 to +105 鈩?temperature range from a 1.8 to 3.6 V power supply. The supply voltage can drop to 1.7 V when the device operates in the 0 to 70 鈩?temperature range and PDR is disabled. A comprehensive set of power-saving mode allows the design of low-power applications.The STM32F405xx and STM32F407xx family offers devices in four packages ranging from 64 pins to 176 pins. The set of included peripherals changes with the device chosen.STM32F407xx绯诲垪涓昏鐗规€?鈻?Core: ARM 32-bit Cortex™-M4 CPU with FPU, Adaptive real-time accelerator (ART Accelerator™) allowing 0-wait state execution from Flash memory, frequency up to 168 MHz, memory protection unit, 210 DMIPS/1.25 DMIPS/MHz (Dhrystone 2.1), and DSP Instructions鈻?Memories– Up to 1 Mbyte of Flash memory– Up to 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM– Flexible static memory controller supporting Compact Flash, SRAM,PSRAM, NOR and NAND memories鈻?LCD parallel interface, 8080/6800 modes鈻?Clock, reset and supply management– 1.8 V to 3.6 V application supply and I/Os–POR, PDR, PVD and BOR– 4-to-26 MHz crystal oscillator– Internal 16 MHz factory-trimmed RC (1% accuracy)– 32 kHz oscillator for RTC with calibration– Internal 32 kHz RC with calibration鈼?Low power– Sleep, Stop and Standby modes– VBAT supply for RTC, 20×32 bit backup registers + optional 4 KB backup SRAM鈻?3×12-bit, 2.4 MSPS A/D converters: up to 24 channels and 7.2 MSPS in triple interleaved mode鈻?2×12-bit D/A converters 鈻?General-purpose DMA: 16-stream DMA controller with FIFOs and burst support鈻?Up to 17 timers: up to twelve 16-bit and two 32- bit timers up to 168 MHz, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input鈻?Debug mode– Serial wire debug (SWD) & JTAG interfaces– Cortex-M4 Embedded Trace Macrocell™鈻?Up to 140 I/O ports with interrupt capability– Up to 136 fast I/Os up to 84 MHz– Up to 138 5 V-tolerant I/Os鈻?Up to 15 communication interfaces– Up to 3 × I2C interfaces (SMBus/PMBus)– Up to 4 USARTs/2 UARTs (10.5 Mbit/s, ISO 7816 interface, LIN, IrDA, modem control)– Up to 3 SPIs (37.5 Mbits/s), 2 with muxed full-duplex I2S to achieve audio class accuracy via internal audio PLL or external clock 2 × CAN interfaces (2.0B Active)– SDIO interface鈻?Advanced connectivity– USB 2.0 full-speed device/host/OTG controller with on-chip PHY USB 2.0 high-speed/full-speed device/host/OTG controller with dedicated DMA, on-chip full-speed PHY and ULPI– 10/100 Ethernet MAC with dedicated DMA: supports IEEE 1588v2 hardware, MII/RMII 鈻?8- to 14-bit parallel camera interface up to 54 Mbytes/s鈻?True random number generator鈻?CRC calculation unit鈻?96-bit unique ID鈻?RTC: subsecond accuracy, hardware calendarSTM32F407xx涓昏搴旂敤:These features make the STM32F405xx and STM32F407xx microcontroller family suitable for a wide range of applications:鈼?Motor drive and application control鈼?Medical equipment鈼?Industrial applications: PLC, inverters, circuit breakers鈼?Printers, and scanners鈼?Alarm systems, video intercom, and HVAC鈼?Home audio appliances鍥?.STM32F40x绯诲垪鏂规鍥維TM3240G-EVAL璇勪及鏉縏he STM3240G-EVAL evaluation board is a complete demonstration and developmentplatform for the STM32F4 series and includes an embedded STM32F407IGH6 highperformance ARM®Cortex™-M4F 32-bit microcontroller.The full range of hardware features on the board is provided to help you evaluate all peripherals (USB OTG HS, USB OTG FS, ethernet, motor control, CAN, MicroSD Card™,smartcard, USART, Audio DAC, RS-232, IrDA, SRAM, MEMS, EEPROM… etc.) and develop your own applications. Extension headers make it possible to easily connect a daughter board or wrapping board for your specific application.The in-circuit ST-LINK/V2 tool can be easily used for JTAG and SWD interface debugging and programming.鍥?. STM3240G-EVAL璇勪及鏉垮褰㈠浘STM3240G-EVAL璇勪及鏉夸富瑕佺壒鎬?鈻?STM32F407IGH6 microcontroller.鈻?16 Mbit SRAM鈻?1 Gbyte or more MicroSD Card鈻?Boot from user Flash, system memory or SRAM鈻?Both ISO/IEC 14443 type A and B smartcard support鈻?I2C compatible serial interface 8 Kbytes EEPROM, MEMS and I/O expander鈻?IEEE 802.3-2002 compliant ethernet connector鈻?Two CAN 2.0 A/B channels on the same DB connector鈻?RS-232 communication鈻?IrDA transceiver鈻?USB OTG (HS and FS) with Micro-AB connector鈻?Inductor motor control connector鈻?I2S Audio DAC, stereo audio jack for headset鈻?3.2" 240x320 TFT color LCD with touchscreen鈻?4 color LEDs鈻?Camera module and extension connector for ST camera plug-in 鈻?Joystick with 4-direction control and selector鈻?Reset, wakeup, tamper and user button鈻?RTC with backup battery鈻?Extension connector for daughterboard or wrapping board鈻?JTAG, SWD and trace debug support鈻?Embedded ST-LINK/V2鈻?Five 5 V power supply options: Power jack, USB FS connector, USB HS connector,ST-LINK/V2 or daughterboard鍥?. STM3240G-EVAL璇勪及鏉跨‖浠跺竷灞€鍜岄厤缃浘鍥?. STM3240G-EVAL璇勪及鏉垮厓浠跺竷灞€鍥惧浘5. STM3240G-EVAL璇勪及鏉跨數璺浘(1)鍥?. STM3240G-EVAL璇勪及鏉跨數璺浘(2)鍥?. STM3240G-EVAL璇勪及鏉跨數璺浘(3)鍥?. STM3240G-EVAL璇勪及鏉跨數璺浘(4)鍥?. STM3240G-EVAL璇勪及鏉跨數璺浘(5)鍥?0. STM3240G-EVAL璇勪及鏉跨數璺浘(6)鍥?1. STM3240G-EVAL璇勪及鏉跨數璺浘(7)鍥?2. STM3240G-EVAL璇勪及鏉跨數璺浘(8)鍥?3. STM3240G-EVAL璇勪及鏉跨數璺浘(9)鍥?4. STM3240G-EVAL璇勪及鏉跨數璺浘(10)鍥?5. STM3240G-EVAL璇勪及鏉跨數璺浘(11)鍥?6. STM3240G-EVAL璇勪及鏉跨數璺浘(12)鍥?7. STM3240G-EVAL璇勪及鏉跨數璺浘(13)鍥?8. STM3240G-EVAL璇勪及鏉跨數璺浘(14)鍥?9. STM3240G-EVAL璇勪及鏉跨數璺浘(15)鍥?0. STM3240G-EVAL璇勪及鏉跨數璺浘(16)鍥?1. STM3240G-EVAL璇勪及鏉跨數璺浘(17)鍥?2. STM3240G-EVAL璇勪及鏉跨數璺浘(18)鍥?3. STM3240G-EVAL璇勪及鏉跨數璺浘(19)鍥?4. STM3240G-EVAL璇勪及鏉跨數璺浘(20)鍥?5. STM3240G-EVAL璇勪及鏉跨數璺浘(21)璇︽儏璇疯:/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/DM00037051.p df鍜?internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/USER_MANUAL/DM00036746. pdf。
MIPS -- 适用于MCU的处理器
MIPS -- 适用于MCU的处理器MIPS科技是知名的致力于开发和授权高性能处理器内核以及32位和64位架构的公司。
作为数字家庭和网络领域中的市场领先者,MIPS架构亦已在32位微控制器(MCU)领域大量应用,与基于ARM架构的内核产品相比,可提供性能更高、功能更丰富且功耗更低的解决方案。
MCU广泛应用于各种市场应用,包括以工业、自动化、汽车、消费电子以及以无线通信为代表的前沿技术。
在这些类型的应用中,MCU的运用使得对嵌入式处理器内核的需求不断增长,同时要求嵌入式处理器内核提供更高效的性能、更快的实时响应、更低的功耗以及广泛的生态系统支持。
这些需求来源于各种新挑战,包括需要运行更复杂的RTOS控制软件,以及集成更高速的通信接口与更复杂的接口。
32位MCU正逐步为下一代应用提供解决方案。
Semico Research Corp.预测32位MCU 产品出货量的年复合增长率(compound annual growth rate,CAGR)在未来几年为18%,在2014年出货量将达到25.73亿件。
选择正确的处理器架构是使MCU产品达到性能、成本和上市时间目标的关键决策条件。
本文将对MIPS®处理器内核中实现的设计功能进行介绍,这些功能对其达到业界领先的性能起到了关键作用。
此外,我们将对基于MIPS和ARM架构(两种最流行的嵌入式处理器架构)的MCU设计解决方案进行比较。
我们的分析将会证明,MIPS提供的解决方案性能更高、功耗更低且具有更先进的功能和卓越的开发支持。
1.MIPS架构MIPS架构于20世纪80年代早期在斯坦福大学诞生,是基于简洁的加载/存储RISC(精简指令集计算)技术的架构。
RISC技术实现了简单但全面的指令集,并使用深度指令流水线,与以前的CISC(复杂指令集计算)架构相比,可获得更快的执行速度和更高的性能。
相比较而言,ARM架构基于混合的RISC/CISC架构,其设计复杂,且实现高级别性能的能力有限。
32位USB MCU

SiM3U1xx 350nA 休眠模式,RTC启动 <100nA 休眠模式,RTC停止
优点
延长电池寿命 减少系统功耗 易于满足能源环保要求
14
开发人员的挑战8 –上市时间
完善的开发工具集降低开发难度
软件
信息界面
硬件
软 件库
免费下载基于 Eclipse的开发 工具套件 大量插件 支持Keil 编译器 支持IAR 编译器
我们的核心特征 混合信号创新
保证高性能的同时,单芯片上集成复杂的混合信号 减少外部元件,降低系统成本和设计复杂度 标准的CMOS制造工艺
良好记录
基于8051的8位单片机产品之市场领导者 超过20,000种终端产品采用Silicon Labs MCU产品,器件出货量超过10亿件
优点
优化布局,简化PCB布线 减少PCB层数(降低成本) 容易处理最终设计变动
Crossbar1
SSG RTC I2S I2C1 CMP0S SPI2 I2C0 PB CMP1S USART1 UART1 SPI1 UART0 LPTimer
50 49 48 47 46 45 44 43 42 41
电压 调节器
USB上拉、
昂贵的
8MHz晶体
终端电路
电容触摸 电路
优点
减少系统成本和增加系统可靠性
EMI
12
稳定性
降低EMI(无外部晶体架构减少时钟相关的噪声辐射 源)
开发人员的挑战6 –简化设计
独有的高驱动I/O增加设计灵活性
特性
高达6个高驱动能力(5-300mA)I/O 完全可编程
32位产品是MCU市场中规模最大、增长最 快的产品 2012年预计达到55亿美元
2021年传感网应用开发(中级) 公开训练题第10套 理论部分及答案
传感网应用开发-中级一、单项选择题(20题,每题1分,共20分)1.关于GB5-A1E光敏传感器,下拉说法有误的是()。
A、环境光强度转变与输出电流成正比B、对不同波长的入射光具有相同的灵敏度C、在有效区域光电流才与光强呈线性关系D、工作温度范围广2、以下叙述中正确的是()。
A.break语句的作用是: 使程序的执行流程跳出包含它的全部循环B.continue语句的作用是:使程序的执行流程跳出包含它的本层循环C.break 语句只能用在循环体内和switch语句体内D.在循环体内用法break语句和continue语句的作用相同3、STM32L151C8T6是基于()内核的32位MCU。
A.ARM Cortex-M0 B.ARM Cortex-M3C.ARM Cortex-M4 D.ARM Cortex-M4F4. 关于STM32 中断优先级,说法有误的是()。
A、抢占优先级高的中断可以打断抢占优先级低的中断B、两个抢占优先级相同的中断,不会形成中断嵌套C、抢占优先级相同的两个中断同时发生,子优先级高的中断先执行D、抢占优先级和子优先级相同的两个中断同时发生,随机选择一个响应5.关于STM32F1系列定时器,下列说法有误的是( )。
A、系统定时器SysTick是一个24bit向下递减的计数器,属于CM3内核的外设B、基本定时器TIM6和TIM7为16位只能向上计数的定时器,只能定时,没有外部IOC、通用定时器TIM2/3/4/5是16位可以向上/向下计数的定时器,可以定时D、通用定时器TIM2/3/4/5各有4个外部IO,可对某一IO口同时进行输入捕获和输出比较6.STM32串口的数据发送引脚Tx通常设置为( )的I/O口工作模式,并在管脚上进行( )操作。
A、复用推挽模式; Pull-upB、复用开漏模式; Pull-upC、复用推挽模式; Pull-downD、复用开漏模式; Pull-down7、关于Modbus 功能码,下列说法有误的是( )。
8位MCU如何升级至32位MCU

8位MCU如何升级至32位MCU目前的MCU市场分为三个部分,8位、16位和32位内核(4位内核MCU现在已相当少用,故在本次比较中将其忽略)。
对于这三个部分中的每一个,其规模大体相同。
传统上8位内核占最大的市场份额。
根据一些分析人士报告,可能32位内核市场占有率已经超过了8位内核。
即使目前尚未超过,时间也不会太长。
32位内核市场份额是迄今为止增长最快的。
8位内核和16位内核仍在增长,但在速度方面远不如32位内核(8位内核的增长速度仍快于16位内核)在很长的一段时间内,很多人相信16位MCU可能会被8位MCU和32位MCU取代。
目前的32位MCU器件采用最新技术制造(与8位内核和16为内核相比)。
MCU制造商能够使用这些最新的技术,使得32位MCU体积变得越来越小,因而变得越来越廉价。
由于32位MCU所具有的价格和性能,很多分析人士相信,设计工程师将跳出16位领域,直接转向具有高性能的产品,保证其设计的未来。
8位MCU无论是在性能还是存储处理能力方面均达到了其极限。
这也是目前存在16位和32位MCU的原因之所在。
随着行业按照摩尔法则的轨迹发展,32位MCU变得越来越小和越来越廉价,以至于在传统的8位和16位领域方面也具有了竞争力。
与8位和16位MCU相比,这些新的32位MCU具有更高的处理能力。
典型的8位MC U的速度在10~30MIPS之间。
16位MCU介于20和40 MIPS之间。
而新的32位MCU通常具有80~ 100 MIPS的处理能力!这是处理能力和速度方面的重大改进。
与8位和16位MCU相比,很多32位MCU具有更小的体积,通常具有更低的功耗。
较小的体积通常意味着更好的功耗、更低的电流消耗和更低的有效输入电压。
一些新产品的休眠电流几乎无法测量,提供的输入电压低至0.5V。
这就为32位MCU提供了巨大优势。
在当今市场上,功率为王。
即使某一应用不是以电池为供电,目前的设计人仍不得不考虑功耗。
新能源汽车三大核心技术

新能源汽车三⼤核⼼技术在新能源汽车的整个平台架构中,VCU(Vehicle Control Unit整车控制器)、MCU (Moter Control Unit电机控制器)和BMS(BATTERY MANAGEMENT SYSTEM电池管理系统)是最重要的核⼼技术,对整车的动⼒性、经济性、可靠性和安全性等有着重要影响。
⽬录:VCUMCUBMSVCU:VCU是实现整车控制决策的核⼼电⼦控制单元,⼀般仅新能源汽车配备、传统燃油车⽆需该装置。
VCU通过采集油门踏板、挡位、刹车踏板等信号来判断驾驶员的驾驶意图;通过监测车辆状态(车速、温度等)信息,由VCU判断处理后,向动⼒系统、动⼒电池系统发送车辆的运⾏状态控制指令,控制车载附件电⼒系统的⼯作模式;VCU具有整车系统故障诊断保护与存储功能下图为VCU的结构组成,共包括外壳、硬件电路、底层软件和应⽤层软件,硬件电路、底层软件和应⽤层软件是VCU的关键核⼼技术VCU硬件采⽤标准化核⼼模块电路(32位主处理器、电源、存储器、CAN)和VCU专⽤电路(传感器采集等)设计其中标准化核⼼模块电路可移植应⽤在MCU和BMS,平台化硬件将具有⾮常好的可移植性和扩展性随着汽车级处理器技术的发展,VCU从基于16位向32位处理器芯⽚逐步过渡,32位已成为业界的主流产品底层软件以AUTOSAR汽车软件开放式系统架构为标准,达到电⼦控制单元(ECU)开发共平台的发展⽬标,⽀持新能源汽车不同的控制系统;模块化软件组件以软件复⽤为⽬标,以有效提⾼软件质量、缩短软件开发周期驾驶员转矩解析、换挡规律、模式切换、转矩分配和故障诊断策略等是应⽤层的关键技术,对车辆动⼒性、经济性和可靠性有着重要影响下表为世界主流VCU供应商的技术参数,代表着VCU的发展动态BMS:电池包是新能源汽车核⼼能量源,为整车提供驱动电能它主要通过⾦属材质的壳体包络构成电池包主体,模块化的结构设计实现了电芯的集成过热管理设计与仿真优化电池包热管理性能电器部件及线束实现了控制系统对电池的安全保护及连接路径通过BMS实现对电芯的管理,以及与整车的通讯及信息交换电池包组成如下图所⽰,包括电芯、模块、电⽓系统、热管理系统、箱体和BMS。