无隔水管钻井泥浆举升系统设计与控制单元研究
页岩气水平井油基泥浆体系的研究及应用
页岩气水平井油基泥浆体系的研究及应用一、本文概述随着全球能源需求的日益增长,页岩气作为一种清洁、高效的能源,其开发利用受到了广泛关注。
在页岩气勘探开发过程中,水平井技术因其能提高单井产量、降低开发成本等优点而被广泛应用。
水平井钻井过程中,油基泥浆体系的选择和应用对钻井效果具有重要影响。
本文旨在深入研究页岩气水平井油基泥浆体系,探讨其性能特点、优化配方以及在实际应用中的效果,以期为页岩气水平井的高效钻探提供理论支持和实践指导。
本文首先介绍了页岩气水平井钻井技术的特点及其对油基泥浆体系的要求,然后详细分析了油基泥浆体系的组成、性能评价方法及其在页岩气水平井中的应用情况。
在此基础上,通过室内实验和现场应用案例,研究了不同油基泥浆体系的性能差异及其对钻井效果的影响。
本文总结了油基泥浆体系在页岩气水平井中的优化应用策略,并展望了未来的研究方向。
通过本文的研究,旨在提高页岩气水平井钻探效率,降低钻井成本,为页岩气资源的可持续开发利用提供有力支持。
本文的研究成果也可为其他类似地质条件下的油气勘探开发提供参考和借鉴。
二、油基泥浆体系基本原理油基泥浆体系是一种在页岩气水平井钻井过程中广泛应用的钻井液体系。
其基本原理在于利用油类作为连续相,通过添加各种处理剂来调整泥浆的性能,以满足钻井过程中的各种需求。
油基泥浆相较于传统的水基泥浆,具有更好的润滑性、更低的摩擦系数以及更佳的防塌效果,因此在处理复杂地层,特别是页岩地层时表现出显著的优势。
油基泥浆的润滑性主要来源于油类本身的低摩擦系数,这可以有效降低钻头与井壁之间的摩擦,减少钻头磨损,提高钻头的使用寿命。
油基泥浆还具有较好的封堵能力,能够在井壁上形成一层薄而坚韧的泥饼,有效防止地层坍塌和井径扩大。
除了润滑性和封堵能力,油基泥浆还具备优良的携岩能力和热稳定性。
携岩能力是指泥浆能够将钻屑有效地携带到地面,防止钻屑在井底堆积,保持井眼清洁。
热稳定性则是指泥浆在高温环境下能够保持稳定的性能,避免因温度变化导致泥浆性能劣化。
钻井装置的安装、试压检验、使用和管理

钻井装置的安装、试压检验、使用和管理第十五条现场装置的安装是指井口装置(包括套管头、变径或升高法兰、钻井四通、分流器、防喷器组)、防喷器控制系统、管汇(包括节流管汇、压井管汇、防喷管线、放喷管线及回收管线)、液气分离器等。
套管头、钻井四通、防喷器、节流压井管汇及其配件的额定工作压力必须与设计的防喷器额定工作压力相匹配。
第十六条钻井井口装置的安装执行以下规定:(一)钻井井口装置包括防喷器组(分流器)、四通及套管头等。
各次开钻井口装置要严格按照设计安装,防喷器闸板尺寸应与作业钻具或套管的外径相匹配。
(二)防喷器安装、校正和固定应符合SY/T 5964《钻井装置组合配套、安装调试与维护》中的相应规定。
防喷器安装完毕后,应校正井口、转盘、天车中心,其偏差不大于10mm,用Ф16mm钢丝绳在井架底座的对角线上将防喷器绷紧固定。
(三)防喷器主体安装时要遵循上全下半的原则,使液控管线安装在同一面。
海洋平台钻井闸板防喷器应采用液压锁紧机构,人工岛钻井闸板防喷器推荐采用液压锁紧机构。
配备手动锁紧装置时,手动锁紧杆尽可能接出钻机底座外,手轮上要标明开、关方向和到底圈数,靠手轮端应支撑牢固,操作杆与锁紧轴中心线的偏斜角不大于30。
,并安装计数装置。
手动锁紧杆离地面超过1.6米应搭操作台。
(四)防喷器顶部安装防溢管时用螺栓连接,不用的螺孔用丝堵堵住;防溢管与防喷器的连接密封可用金属密封垫环或专用橡胶圈。
防溢管处应装挡泥伞,保证防喷器组及四通各闸阀清洁,井口圆井应安装防护盖。
冬季施工,防喷器装置应采取保温措施,保证开关灵活。
(五)四通、套管头的配置与安装应符合SY/T 5964《钻井装置组合配套、安装调试与维护》中的相应规定。
第十七条分流器系统的配套、安装要求:(一)海洋分流器类型应根据井身结构中隔水管尺寸进行选择,其蓄能器的容量应与所选用的分流器关闭性能相匹配。
两侧管线原则上直径不小于254mm;排出管线出口设在平台尾部季节风的下风口或远离平台的两舷艉后安全地方;至少有一个侧向排出口长期处于开启状态。
石油钻井工程中的相关技术研究
由于钻井工程是石油工程的基础,同时它又是一项系统复杂的工程,因此先进的钻井工程技术的应用就显得尤为重要,随着油气资源不断的被挖掘和开采,剩余可采储量在急剧下降,而面对的开采环境却越来越恶劣,鉴于此,很多先进的钻井工程技术应运而生,其中就包括深水钻井技术和欠平衡钻井技术,下面就分别对两项技术做简要阐述。
1 深水钻井技术深水钻井的主要设备包括深水钻井船、半潜式钻井平台和深水定位系统三部分。
深水钻井船主要是深水钻井的动力系统,同时对钻井方向进行校正和改善,为工作人员提供操作和生活的空间;半潜式钻井平台主要是提供支撑的连接作用,使整个钻井系统即使在风浪较大的环境下,仍然能够保证稳定高效的工作状态;深水定位系统中的DGPS定位和声纳定位能够保持钻井装置的稳定性和平衡性。
1.1 大位移钻井和分支水平井钻井技术大位移井和分支水平井是钻井新技术发展的代表,也是最主要的钻井新技术。
随着新技术的发展,利用钻头传感器可以快速反馈前方井眼的倾斜位置和地质层位,进而可以指导钻头沿着预定的井眼轨迹钻进,将钻井的位移大大拉伸。
利用分支水平井可以满足海上钻井的需求,设计对应平台的数量和大小,先在一个平台打一口主干井,然后根据需要延伸出各个分支井,甚至分支水平井,平面上大大提高了油气的泄油面积,纵向上可以同时开采多个油气层。
1.2 动态压井钻井技术动态压井钻井主要应用于深水表层建井工程中。
它主要通过压井的方式来调节浅层气井的井涌状况,原理类似于自动混浆,通过与实际情况结合,实现对高低密度钻井液的合理配置。
在工作中,钻井液主要通过一台具有自动调节密度的混浆装置,使钻井液保持相对稳定的密度,并且可以持续的向井内泵入合适体积的泥浆。
在施工过程中,利用高科技的监测仪器,可以随时对地层压力进行监测。
一旦出现压力升高的状况,可以通过手动输入工作指令的方式,随时泵入高密度的钻井液压井,满足工作的需要。
实际工作中不必按照高密度钻井液的原则,只是根据施工环境的变化逐渐加大钻井液的密度来进行压井作业。
无隔水管钻井泥浆举升系统管路特性计算与分析

t r . e s ou d a s uly c n i e he i a tofc a e n v l e W h l lo f l o s d r t mp c h ng s i o ume fa to f s i— a e, l w n r c i n o ol ph s fo d be a i r i d x a d c nss e c nd x o he d ilng fui . tpr v de he r tc lb ss f r t e d — h v o n e n o it n y i e ft rli l d I o i s t o e i, a i o h e sg fde pwa e ie l s u its s e in o e t r rs re s m dl y t m. f Ke r : ie l s il y wo ds rs re s drli ng; i e i e t e; owe —a fu d p p lne f a ur p r lw l i
2 2 正 第 01
4 1卷 3页 第 7 期 第 3
石 油 矿 机 械 场
0I L FI ELD
E QUI PMENT
2 1 4 ( ) 3 ~ 3 0 2, 1 7 :3 7
o
o
文 章 编 号 Biblioteka 0 13 8 ( 0 2 0 — 0 30 1 0 —4 2 2 1 ) 70 3 — 5
关于石油钻井技术及水里参数设计
毕业设计(论文)题目深水无隔水管钻井关键技术及水力参数设计方法研究学院石油与天然气工程学院专业班级石油工程2012-02学生姓名王雪威学号2012440329指导教师郭晓乐职称教授评阅教师职称2016年5 月18 日学生毕业设计(论文)原创性声明本人以信誉声明:所呈交的毕业设计(论文)是在导师的指导下进行的设计(研究)工作及取得的成果,设计(论文)中引用他(她)人的文献、数据、图件、资料均已明确标注出,论文中的结论和结果为本人独立完成,不包含他人成果及为获得重庆科技学院或其它教育机构的学位或证书而使用其材料。
与我一同工作的同志对本设计(研究)所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
毕业设计(论文)作者(签字):2016年5 月18 日摘要随着石油资源一步步的被开发,勘探新的石油资源就迫在眉睫。
而随着石油勘探技术不断的发展,世界范围内油气资源开发也逐渐向深水进军。
而深水钻井环境恶劣,其中有会出现不少的问题,易造成严重的钻井事故。
在深水环境中进行钻井作业会有相当多的挑战,为了解除这些困难,国外经过一系列研究,开发出了无隔水管钻井液回收钻井技术(RMR),该技术摒弃了传统的隔水管,利用相对较小的回流管线将钻井液和钻屑从海底泵送回钻井平台。
深水无隔水管钻井技术主要解决海洋钻井中地层破裂压力与坍塌压力之间余量较小的问题,采用海底泵举升系统将钻井液和岩屑通过返回管线泵送回海面钻井船,实时调速来调节流量,以满足保持海底钻井液举升泵入口压力恒定的要求。
由于RMR技术是最新发展的技术,目前尚无合适的水力学计算理论和方法。
因此,有必要结合无隔水管钻井液回收钻井技术特点,建立相应的水力参数计算模型,为深水钻井设计提供指导。
本文探讨研究了无隔水管钻井技术,结合了我国的实际情况进行了分析,以及对其所涉及的一系列参数的计算方法。
关键词无隔水管钻井关键技术水力参数AbstractWith the development of oil resources, exploration of new oil resources is imminent. With the development of petroleum exploration technology, the development of oil and gas resources in the world has gradually entered into the deep water. The deepwater drilling environment is poor, which will have a lot of problems, easy to cause serious drilling accident.In order to solve a series of problems encountered in the process of deepwater drilling, foreign research issued without riser drilling fluid recovery drilling technology (RMR), the technique removed riser, using relative smaller reflux pipelines will be drilling fluids and cuttings from submarine pump back to drilling platform. Deep water without riser drilling technology is mainly to solve the ocean drilling fracturing a smaller margin between pressure and collapse pressure, the subsea pump lifting system through drilling fluids and cuttings to return pipeline pump back to the sea drilling ship, real-time control to regulate the flow, to meet the protection to subsea mudlift pump inlet pressure constant. As RMR technology is the latest development of the technology, there is no suitable theory and method of hydraulic calculation. Therefore, it is necessary to establish the corresponding calculation model of the hydraulic parameters, and provide guidance for the deepwater drilling design.This paper discusses the research on the drilling technology of the non riser,combining the actual situation in ourcountry,and the calculation method of a series of parameters.Key Words:No riser ;Drilling Key Technology;hydraulic parameter目录摘要PAGEREF _Toc19667 IAbstract II1 绪论11.1 研究目的及意义11.2 国内外研究现状11.3 无隔水管钻井技术的优势22 无隔水管钻井液回收技术32.1 RMR技术原理及优点32.2井内压力的计算42.2最小钻井液排量的计算52.3 循环系统压力损耗及泵功率计算52.4 深水无隔水管钻井液多级举升技术62.5 钻井液举升系统参数分析62.6 影响举升泵泵效的因素83 无隔水管钻井浅部地层井筒循环压耗分析10 3.1 模型的建立103.2 压耗模型的求解113.2.1钻柱内循环压耗计算113.2.2环空中循环压耗计算123.2.3钻头压降及环空携岩123.3 分析与结论134 深水无隔水管钻井MRL选型以及参数优化16 4.1 MRL压耗分析164.2 MRL参数优化174.2 MRL选型194.2.1 刚性管线194.1.2 柔性管线195 总结21参考文献22致谢231 绪论1.1 研究目的及意义石油对于现代工业来说,是极其重要的,作为一种不可再生的能源,在国家的经济与工业发展中都起到了举足轻重的作用。
深水双梯度钻井技术研究进展

2007-7-13
深水双梯度钻井技术
16
2.3 SMD JIP的发展
•
• •
第三阶段:进行系统设计、制造和试验
(2000年1月~2001年11月,花费3210万美元) 该阶段有8家参与者,主要工作是完善系统设计,建立所 有关键设备的原型,进行现场试验前的场内试验。并且开展 培训程序,向所涉及的各方培训试验井SMD基本工艺、SMD 钻井作业以及SMD井控。
2007-7-13
深水双梯度钻井技术
26
钻杆阀(DSV)
喷嘴
隔离弹簧
2007-7-13
深水双梯度钻井技术
27
海底旋转分离器(SRD)
•
SRD给环空里的泥浆和隔水管里的海水提供了隔离。 它也可以分离泥浆到MLP的内部。SRD当保持需要的隔水 管/环空密封时仍然允许钻杆旋转以及互换。
最大旋转速度: 最大转换速度 旋转压力(动态) 旋转压力(静态) 200 rpm 2 ft/sec 500 psi 2000 psi
20
海水动力泵
海水处理装置
2007-7-13
LMRP
深水双梯度钻井技术
21
泥浆阀
•
MLP上的泥浆阀的作用与常规三缸泵的内部和外部压力 阀相似。
不同的是常规的阀是由弹簧驱动,而泥浆阀是液压驱动的, 因而能够控制带有碎屑的泥浆的流动、大的碎屑剪切力。
•
2007-7-13
深水双梯度钻井技术
22
泥浆阀
2007-7-13
深水双梯度钻井技术
6
ቤተ መጻሕፍቲ ባይዱ
1.2 当前业界实现双梯度的方式
2007-7-13
深水双梯度钻井技术
7
1.3 无隔水管钻井
深水钻井的难点及关键技术
深水钻井的难点及关键技术随着油气资源的持续开采,陆地未勘探的领域越来越少,油气开发难度越来越大。
占地球面积70%以上的海洋有着丰富的油气资源,油气开发重点正逐步由陆地转向海洋,并走向深海。
目前,国外钻井水深已达3000m以上,而我国海上油气生产一直在水深不足500m的浅海区进行,我国南海拥有丰富的油气资源,但这一海域水深在500~2000m,我国目前还不具备在这样水深海域进行油气勘探和生产的技术。
周边国家每年从南沙海域生产石油达5000X104t以上,相当于我国大庆油田的年产量,这种严峻的形势迫使必须加快我国南海等海域的深水油气勘探开发。
石油工业没有关于“深水”的预先定义。
“深水”的定义随时间、区域和专业在不断变化。
随着科技的进步和石油工业的发展,“深水”的定义也在不断发展。
据2002年在巴西召开的世界石油大会报道,油气勘探开发通常按水深加以区别:水深400m以内为常规水深400m-1500m为深水,超过1500m为超深水。
但深度不是唯一的着眼点,只要越过大陆架,典型的深水问题就会出现。
一、深水钻井的难点与陆地和浅水钻井相比,深水钻井有着更为复杂的海况条件,面临着更多的难题,主要表现在以下几个方面。
1、不稳定的海床由于滑坡形成的快速沉积,浊流沉积,陆坡上松软的、未胶结的沉积物形成了厚、松软、高含水、未胶结的地层。
这种地层由于沉积速度、压实方式以及含水量的不同,所以它们的活性很大,给导管井段的作业带来了很大困难。
河水和海水携带细小的沉积物离海岸越来越远,这些沉积物由于缺乏上部压实作用,所以胶结性差。
在某些地区,常表现为易于膨胀和分散性高,这将会导致过量的固相或细颗粒分散在钻井液中。
2、较低的破裂压力梯度对于相同沉积厚度的地层来说,随着水深的增加,地层的破裂压力梯度在降低,致使破裂压力梯度和地层孔隙压力梯度之间的窗口较窄,容易发生井漏等复杂情况。
在深水钻井作业中,将套管鞋深度尽可能设置得深的努力往往由于孔隙压力梯度与破裂压力梯度之间狭小的作业窗口而放弃。
钻井平台设备详解(1)

钻井设备- Swivel & Top driver前面我们已经知道了,钢丝绳穿过定滑轮组和动滑轮组,动滑轮组因此可以上下自由的运动。
但是问题出来了,上下垂直方面可以很方便的运动,但是我们钻井,还需要旋转的力,也就是钻杆是旋转的,我们的滑轮组不可能跟着一起转,否则之间的钢丝绳估计会绞得像麻花。
这是swivel的其中的一个作用,同时我们也知道,钻井需要钻井液,试着想一想,钻杆在哪里高速的旋转着,我们如何把钻井液-泥浆送到钻杆的中空的空间去呢?这是swivel的另外一个重要作用- 泥浆进入钻杆的最初的通道。
如下图,泥浆经高压软管—鹅颈管goose neck—进入swivel。
要起到以上两个作用,swivel的结构就基本上知道一二了。
如下面的彩图,在swivel的本体中,下部的杆swivel stem通过滑动轴承-锥形和本体形成相对运动,本体同时承受侧向力和向下的拉力。
同时杆的顶部和本体上部形成密封空间,泥浆经鹅颈管进入此密封空间,在经空心的杆进入钻杆。
空心杆下部为API螺纹接头,可以和钻杆拧接。
好了,我们现在可以把swivel改造一下---给它加上能够使swivel stem旋转的动力。
如何改造,很简单,加电机和齿轮。
怎么加?我们可以想象一下,既然要使swivel stem旋转,那么我们在swivel stem上加一个大的齿轮,如同汽车的轮子一样,中间杆是swivel stem,轮子是齿轮。
在齿轮的一侧再加一个由电机带动的齿轮,它们啮合在一起。
这样一来,swivel stem就可以在电机的带动下旋转起来。
同样地,为了平横侧向力,以及增加旋转的扭矩,在齿轮的另一侧也加一个电机带着的齿轮。
下图是齿轮箱:然后加上必要的润滑设施和结构部分,以及导向机构。
它有了一个新的名字Top driver,也叫power swivel。
很显然,Top driver与swivel的区别,swivel是它的一部分。
事实上,Top driver 要比上面写的复杂的多。
深水钻井隔水管设计方法及其应用研究
《深水钻井隔水管设计方法及其应用研究》2023-10-27contents •引言•深水钻井隔水管设计基础•深水钻井隔水管设计方法•深水钻井隔水管应用研究•结论与展望•参考文献目录01引言研究背景与意义深水钻井是海上油气开发的重要技术手段,而隔水管是深水钻井的关键装备之一。
深水钻井隔水管设计不当会导致钻井效率低下、钻井成本增加,甚至引发安全事故。
因此,开展深水钻井隔水管设计方法及其应用研究具有重要的现实意义和理论价值。
研究目的建立深水钻井隔水管设计方法,提高隔水管的设计水平和钻井效率,降低钻井成本和风险。
研究方法通过理论分析、数值模拟和实验研究相结合的方法,对深水钻井隔水管进行设计和优化。
研究目的和方法02深水钻井隔水管设计基础深水钻井隔水管是一种用于深水钻井工程的设备,其主要功能是隔离海水和淡水,以保护钻井设备不受海水腐蚀和盐分影响,提高钻井效率。
深水钻井隔水管的材质通常为高强度钢或其他合金材料,其结构包括管体、连接件、密封件等部分。
深水钻井隔水管概述深水钻井隔水管设计原理深水钻井隔水管的设计原理主要包括力学性能、水力学性能、环境适应性等方面的考虑。
水力学性能方面,隔水管需能够承受海水和淡水的压力和流速,因此需要对其水流阻力、耐磨性、耐腐蚀性等方面进行优化设计。
力学性能方面,深水钻井隔水管需承受各种外力和内部压力,因此需要对其强度、刚度、稳定性等方面进行详细设计。
环境适应性方面,深水钻井隔水管需在深海环境下工作,因此需要对其耐低温、耐高压、耐腐蚀等方面进行特殊设计。
深水钻井隔水管设计标准深水钻井隔水管的设计标准主要包括国际标准、行业标准和企业标准三个层次。
国际标准方面,主要包括ISO、API等国际组织制定的相关标准。
行业标准方面,主要包括中国石油天然气集团公司、中国海洋石油总公司等石油行业组织制定的相关标准。
企业标准方面,主要包括各石油公司的企业标准,如中石油、中石化的企业标准等。
03深水钻井隔水管设计方法利用遗传算法进行优化,以隔水管的结构参数为优化变量,以实现最优的力学性能和使用寿命为目标函数,通过优化得到隔水管的最优设计方案。
无隔水管泥浆回收钻井系统吸入模块密封胶芯非线性摩擦接触分析
No l a ito a nt c ni ne r Frc in lCo a tAnay i fS a b e n S c in l ss o e lRu b r i u to
21 0 0年 1 2月 第3 5卷 第 1 2期
润滑与密封
L RI UB CAT ON I ENGI NEERI NG
De . 2 0 c 01
Vo. 5 No 1 13 . 2
D :1 . 9 9 ji n 0 5 0 5 . 0 0 1. 1 OI 0 3 6 /. s. 2 4— 10 2 1 . 2 0 2 s
易导致胶芯破坏;胶芯与钻具 间的接触面积基本不随摩擦 因数变化而变化 ,摩擦力随摩擦因数 的增大近似成线性增加 ;
胶 芯 与钻杆 接 头接 触 时 ,摩擦 力 较 大且 增 长显 著 ,说 明胶 芯 与接 头 接触 时 更容 易 发生 磨 损 。
关键词:密封胶芯;无隔水管泥浆 回收钻井 ;接触压力 ;库伦摩擦
( . e t r fh r n ier ga dS ft e h ooya hn nvri fP t lu 1 C nr f s oeE gn e n n aeyT c n lg t iaU ies yo er e m, e o Of i C t o D n igS a d n 5 0 1 C ia 2 C OO ee rhIs tt , ej g1 0 2 , hn ) o g n h n o g2 7 6 , hn ;. N C R sac ntue B in 0 0 7 C ia y i i
钻井液自动灌浆控制系统介绍PPT课件

-
12
(7)返浆传感器:0电平有效;
(8)遥控接收器电源:220VAC
(9)遥控发射器电源:3号(AA)酸性电池( 注:禁止 使用充电电池)
(10)工作方式:连续 ;
(11)系统本安防爆,正常运行时:不会产生火花和电弧;
(12)大气压力:86kpa~110kpa;
(13)外形尺寸:高×宽×厚780*545*440
-
3
根据计算的钻杆排代量达到一定数量时,通 过现场控制【手动(摇控)、定时、自动】,由 计算机发出指令,控制灌浆系统启动灌浆;在返 流口处有一溢流触发装置,该装置能够及时准确 的把返流口是否有泥浆返出信号传递给计算机, 该信号控制灌浆系统及时停泵,停止灌浆。
本控制系统大大提高了起钻的工作效率。为 安全、科学、高效、快速的钻井作业提供了强有 力的保障。
-
17
选择定时控制灌浆系统后,点击灌浆开始框, 控制系统会自动根据用户设定好的参数自动灌浆, 待起钻完毕后,点击灌浆停止框后,系统会自动 停止灌浆。
-
18
选择自动灌浆系统,计算机会根据用户设定 好的起出钻杆柱数,自动的完成泥浆的灌注和停 止。
-
19
选择自动灌浆系统,计算机会根据用户设定 好的起出钻杆柱数,自动的完成泥浆的灌注和停 止。
毛重:32.2Kg 净重:20.7Kg
-
13
主要功能
1、DR-Z-1型钻井液自动灌浆控制系统由计算 机根据起钻过程中所给的灌浆指令,通过信号控 制开启灌浆泵向井筒内及时的进行泥浆灌注,当 井筒内钻井液从返流口溢出时触发溢流传感器, 传感器将泥浆返出信号传递给计算机,从而控制 泥浆灌注的停止。
2、控制系统主机安装于主控防爆箱内,溢流 传感器、超声波液位计通过动力控制箱连接至主 控防爆箱内的主机各功能模块,分别控制外部开 关信号和模拟信号,并输出灌浆泵控制信号。
中国南海深水优快钻井技术探索与应用
当代化工研究Modem Chemical Research58技术应用与研究2021•12中国南海深水优快钻井技术探索与应用*刘保波陈彬李彬(中海石油深海开发有限公司广东518000)摘耍:南海深水钻井因面临许多与浅水钻井不同的困难和挑战,导致深水钻井作业周期更长.当前,随着国内加大对南海深水油气田的勘探,优快钻井技术成为了深水油气田大规模勘探开发取得突破的关键技术之一.本文将介绍南海东部在深水优快钻井技术和管理上的探索与突破,实现了从前期常规深■水探井2500m当量平均钻井周期27.59天缩短至11.82天,为加快南海深水油气田的勘探开发提供了技术支撑.关键词:南海深水;优快钻井;技术;钻井周期中国分类•号:T文献标识码:AExploration and Application of Deep-water Excellent and Fast Drilling Technology inSouth China SeaLiu Baobo,Chen Bin,Li Bin(CNOOC Deep-sea Development Co.,Ltd.,Guangdong,518000)Abstractz Deep-water drilling in the South China Sea f aces many difficulties and challenges different f rom shallo^-^ater drilling,resulting in a longer operation cycle.At p resent,with the increasing exploration of d eep-water oil and g as f ields in the South China Sea in China,excellent and fast drilling technology has become one of t he key technologies to achieve breakthroughs in large-scale exploration and development of d eep-water oil and gas f ields.This paper will introduce the exploration and breakthrough in deep-water excellent and f ast drilling technology and management in the eastern part of t he South China Sea.The average drilling cycle of2500-meter-equivalent conventional deep-water exploratory wells has been shortened f rom27.59days to11.82days,and p rovided technical support f or accelerating the exploration and development of d eep-^ater oil and gas fields in the South China Sea.Key words:deep water in South China Sea;excellent andfast drilling;technology^drilling cycle深水优快钻井技术是通过集成先进、适用的技术和装备,优化、创新作业流程,并结合应用新的管理模式而形成的一项系统优化配套技术,旨在大幅提高深水钻井作业效率,降低钻井作业周期和勘探成本。
双梯度钻井和传统隔水管钻井井控程序的比较(精)
双梯度钻井和传统隔水管钻井井控程序的比较摘要为了满足世界能源需求的增长的,石油生产公司必须在更加恶劣的环境中寻找油气。
显示巨大希望的一个区域是美国墨西哥湾的深水区域,这已经被过去几年增加的租借价格和钻探活动。
随着钻井进入深水,为了安全和成功地操作,必须发展新技术。
在1996年左右开始的四个项目开始研究双梯度钻井技术,即DGD,应用与水深超过5000ft。
这四个项目是Shell石油公司项目[1]、海底泥浆举升(SMD)联合项目[2]、Deep Vision项目[3]和Maurer技术的空心玻璃球项目[4]。
许多文章已经讨论了双梯度钻井技术在超深水中[5,6,7]超越传统钻井技术的优点。
尽管大量的资料证明了双梯度项目的优点,但是很少有是四个项目发表的关于主要关注点之一的资料。
也就是双梯度钻井和传统隔水管[6,8,9]钻井相比较,井控具有什么不同。
本文揭示了双梯度钻井技术和传统隔水管技术井控方法的比较,这是基于作者作为SMD项目的一个成员所做的工作。
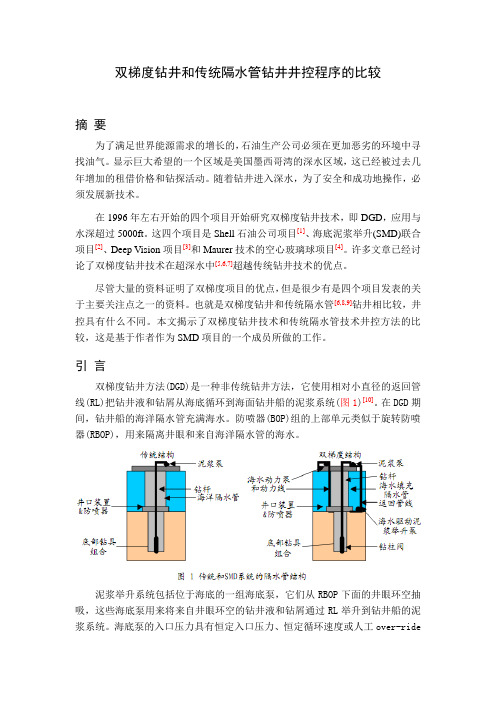
引言双梯度钻井方法(DGD)是一种非传统钻井方法,它使用相对小直径的返回管线(RL)把钻井液和钻屑从海底循环到海面钻井船的泥浆系统(图1)[10]。
在DGD期间,钻井船的海洋隔水管充满海水。
防喷器(BOP)组的上部单元类似于旋转防喷器(RBOP),用来隔离井眼和来自海洋隔水管的海水。
泥浆举升系统包括位于海底的一组海底泵,它们从RBOP下面的井眼环空抽吸,这些海底泵用来将来自井眼环空的钻井液和钻屑通过RL举升到钻井船的泥浆系统。
海底泵的入口压力具有恒定入口压力、恒定循环速度或人工over-ride模式的操作选项,最普遍的操作模式是保持等于海水静水压力的恒定入口压力。
通过保持海底泵的入口压力等于海水的HSP,可以在整个井眼中循环更大密度的钻井液,但仍旧维持和传统隔水管钻井相等的井底压力。
钻柱中的更大密度泥浆,以及维持(泥浆举升泵)MLP的入口压力等于海水井水压力,结果导致海底以下钻柱内的压力和环空中的压力失衡。
海底泥浆举升钻井的事故案例分析

B g p使用 海底泵 系统 和改进 的泥浆 钻于 1 m水深 的Raa t 井 ,岩 屑穿过4 m的气 隙返 回 自 PE y t 9 h ma l 9 升 式钻井平 台。海底泵 意味着 泥浆 可被用 于 闭环 系统 ,克服 薄弱 的导管鞋和 大 的气隙 。使用 改进 的泥
漏 失 区并给 泥浆 漏失 添加 剂提 供附着 。 在 l5 m、 14 m和 1 6 m,出现 严 重的底 部井 眼漏 失 。堵 漏 8l 89 86
工作受益 于提 起钻头 后停止 循环5 钟 。在 低循 环速率 钻进前 ,钻 屑帮助 钻井液 漏 失添 加剂堵 漏 。 分
1 3 埃 及 .
用R 技术 ,可 以保持 封 闭的循环 系统 及用 改进过 的泥浆 钻使 用于 问题 区域 , 发现 以上 问题 的根源 MR 并
不 是地层 的塌 陷 ,而 是大量 的漏 失 ,使环空 流体未 承载 钻屑 而是 回到井 眼底部 。通过 堵漏 和使用ห้องสมุดไป่ตู้低泵
速钻 井 ,安全地 钻进和 下套 管 固井 。
其他 问题包 括 :S 上 的摄 像机灯 光 失效 ,它可 能被 天气恶 劣 引起 的钻 柱震 动所震坏 。天气转 好 MO
后 ,钻进重 新 开始 ,R 提 供泥 浆帽 的 图像 。钻 穿第 一个砂 层后 ,振 动筛被 细沙 堵塞 。钻 至16 英尺 OV 28
振动筛 处 , 显示 返 回泥浆漏 失 , MO视觉监 控 同时确认 。 S 终止 钻进 , 小流速 , 减 减小 泥浆静 重到91p , . g p
海底泥浆举升钻井 的事故案例 分析
张鹏 飞 , 陈国明 , 志明 2 许亮斌 殷
(. 中国石油大学 海洋油气装备 与安全技术研 究 中心 , 东营 2 76 ; 1 501
深水无隔水管钻井液多级举升系统泵参分析

根据钻井作业 中水深 H 回流 管线 与海底泥线的夹角 0 、 可以确定 回流管线 的长度 L 。回流管线 的内径可 以根据下面的公式确定 :
. 3 钻井液在 回流管线中流动 . 其水头损失 由局 部水头损失和沿程阻 力损失两部分组成 。 由于举升系统中回流管线很长 , 管径变化不大 , 接 头、 阀门较少 。 因此局部水头损失相对较小 . 际计算 中可以忽略不 在实 计。 液体流态判断的主要参数是雷诺数 . 流体的雷诺数计算公式 幂率
髓
扁平状为 2I . 岩屑在钻井液中的实际上返速度 为 :
-/。 )
- 一
,
() 3
满足携带岩屑的最小泥浆泵排量 满足下 面的公式 :
Q = — / o ( ) 4 () 4 式 中, Q 为泥浆泵 的最小排量 , 3 ; 为钻头 直径 , d 为钻杆 m/ s m; p 外径 , m。 2 钻井液 回流管线的参数计算 . 2 根据 固液两相流 的理论可知 当液相的流动速度大于 固相颗粒沉 降速度 的 2 倍时 , 流体中固相颗粒随液相 流动。若考虑其他因素的影 响, 为保证管道不被堵塞 , 一般取混合流体 为沉 降速度 的 3 5 。 ~倍
控制压力钻井技术

主要内容:
井底压力恒定MPD (CBHPMPD) 双梯度MPD(Dual-gradientMPD) 加压泥浆帽MPD (Pressured-mud-cap MPD,PMCD) HSEMPD(HSE or返回流量控制 (RFC)
其它演变的钻井方法
22
二、控压钻井(MPD)各种应用模式
10
一、控压钻井(MPD)概述
存在窄密度窗口地层的几种情况 压力敏感地层裂缝、溶洞等连通性好的地层,停泵井涌,
开泵漏失; 长井段同一压力系统当平衡上部地层时,钻开下部地层
会发生漏失,降低密度上部地层流体会有外溢; 上部存在异常高压层钻遇下部正常压力目的层,由于地
层压力降低发生漏失;
11
按其压力控制方式可分为主动型和被动型。 “被动型”MPD (ReactiveMPD):采用常规钻井方法钻 井,但将设备组装成能够迅速应对意料外的压力变化。钻井
程序中至少需要装备有旋转控制装置(旋转防喷器或旋转头)、
节流管汇,或许还有钻柱浮阀等。 “主动型”MPD (ProactiveMPD):充分利用组装设备
——井底压力恒定MPD
(CBHPMPD)
井底压力恒定MPD又称为 当量循环密度( ECD) 控制。 设计时使用低于常规钻井方式 的钻井液密度进行近平衡钻井。 循环时井底压力 = 静液柱压
力+环空压耗
23
二、控压钻井(MPD)各种应用模式
当关井、接钻杆时,循环压耗消失,井底压力处于欠平衡 状态,在井口加回压使井底压力保持一定程度的过平衡,防止
27
二、控压钻井(MPD)各种应用模式
28
二、控压钻井(MPD)各种应用模式
29
二、控压钻井(MPD)各种应用模式
无隔水管钻井泥浆举升系统参数计算
行计 算和研 究, 分析 了岩屑 参数 对举升 系统参数的影响 , 出颗粒 的尺寸 、 得 体积 分数是举升 系统水 力设计 需要考虑的 关键参数。
研 究结 果 为 无 隔水 管 钻 井 泥 浆举 升 设 备 的设 计提 供 了理 论依 据 。
关键词 :无隔水管钻井 ;深水钻井 ;泥浆举升 系统 ; 参数计算
i 00m ae e t r a re t,ndpa a ee n 5 w trd p h we ec ri dou a r m trofc  ̄igsSifu et a a ee sofm u its tr a n l s d u n ’ n nc o p r m tr l dlf ysem w sa a y e . Ke y wor : ie l s rli ds rs re sd l i ng; e de pwa e rli t rd lng; u i yse ; o pu ai n ofp r m e e i m dlf s tm c m l t to a a t r
h s r m es a e y t es b e u s Ac o dn a a t cr q ie e t fmu l t y t m n — h s df w e r , a a o efo t e b d b u s ap mp . c r i g t p r mer e ur m n d i se a d t p a e o t o y p r - h h o i o fs wo l h me r o u ai n o d i y tm s o d c e , n r v d dt e r t a b ss o ed s n o d i q ime t f h s r s ti c mp t t f c o mu l s se wa n u td a dp o i e o ei l a i rt e i f l f c h c f h g mu l e u p n er e l s l f ot i e mu c v r d i i g I e l h f h b v tt d c mp tt n l t o , o u a i na d r s a c f a a tr f dr o ey rl n . n t g t ea o esae o u ai a meh d c mp tt n e e r h o r mee d i y tr e l h i o t o o p o mu l t sem fs
控压钻井技术

o 美国在上世纪60年代后期开始应用控制压力钻井。
o MPD第一次正式出现是在2004年阿姆斯特丹的IADC/SPE钻井 会议上。
o MPD技术的意图是利用欠平衡工具和技术控制进入井眼的地 层流体,其主要目的是避免通过加重钻井液来解决钻井复杂问 题。减少套管层数,提高钻井效益,降低钻井成本。
MPD与UBD、PD的关系
o 控制压力钻井是一种在整个井眼内精确控制环空压力剖面 的自适应钻井过程( Adaptive drilling process) 。 o 其目的在于确定井下压力窗口,从而控制环空液压剖面。 o MPD旨在避免地层流体连续地流入到地面,钻井作业任何 意外的流动将使用适当的方法进行安全的控制。( Jan 2008 ) MPD也有翻译为:压力管理钻井
系统包括: o 自动节流管汇 o 回压泵 o 集成压力控制器 o 流体力学模型
控制回压(AtBalance的动态环空压力控制DAPC) 被Schlumberger收购
控制回压(Halliburton的GeoBalance MPD)
o GeoBalance Self-Managed:旋转控制装置、双液动节流阀的节流管汇。
MPD解决漏涌并存的原理
o 在裂缝性井漏情况下,钻井液密度窗口非常狭窄,往 往不到0.02 g/cm3,环空循环摩阻足以造成漏失。
MPD解决井漏的原理
当量泥浆密度(g/cm3) 0.8 300 地漏试验 800 破裂压力 1300 漏失压力 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6
海底泥浆举升钻井 (SMD)
SMD 是一个联合工业项目, 参与的公司: BP, Conoco, Chevron, Texaco, Schlumberger, Hydril 。
轻型无隔水管作业船在水下井口油井修井中的应用

轻型无隔水管作业船在水下井口油井修井中的应用张志刚【期刊名称】《《安全、健康和环境》》【年(卷),期】2019(019)008【总页数】5页(P11-14,29)【关键词】油井; 水下井口; 修井; 轻型无隔; 水管作业船; 半潜式钻机【作者】张志刚【作者单位】中国石化国际石油勘探开发有限公司北京100029【正文语种】中文国际上从事海洋油气田勘探开发相对较早的一些海域,受半潜式钻机的供应数量及高昂作业日费的限制,对采用水下井口开发的油田修井作业方式进行了尝试与探索,逐渐发展和完善了轻型无隔水管作业船工艺技术,使水下井口油气井能以较低成本快速修井,释放油气井产能。
我国使用水下井口开发的油田修井作业时仍完全依托半潜式钻机进行,未尝试过轻型无隔水管作业船的修井应用。
本文以英国Helix公司研制的轻型无隔水管作业船为例,探讨其替代半潜式钻机实施一定范围的修井作业能力[1]。
轻型无隔水管作业船不配备隔水管及钻井配套设备等,相对于半潜式钻机来说,总重量和体积大大减小,具有机动灵活、作业效率高的特点。
与半潜式钻机相比,使用轻型无隔水管作业船进行相同类型的修井作业施工周期可大大缩短,作业费用大大降低。
轻型无隔水管作业船采用动力定位设计,修井过程中船舶能垂直定位在水下井口之上;作业船的小型井架能充分满足起、下水下井口作业控制系统和采油树的提升力要求,水下井口作业控制系统能保证修井过程中井内流体不逸散到海水中造成污染,其设计很好地满足了安全环保设计理念。
因此,轻型无隔水管作业船成为了国外作业者对水下井口油井修井作业时首选的工作船舶[2],相信轻型无隔水管作业船在国内海域的水下井口油气田开发中同样会有广阔的市场前景。
1 轻型无隔水管作业船的主要配套设备轻型无隔水管作业船通过对船舶各模块进行特殊设计,使各模块(系统)能相应完成半潜式钻机类似的功能,但其体积和重量大大小于半潜式钻机,实现施工的高效、快捷。
轻型无隔水管作业船相对于半潜式钻机系统设计的技术思路见表1。
基于PLC技术的钻井管柱自动输送系统设计

基于PLC技术的钻井管柱自动输送系统设计
吴枝国;薛程;盛益;刘鹏;吴德庆
【期刊名称】《机械制造与自动化》
【年(卷),期】2024(53)3
【摘要】常规钻井管柱自动输送系统由于在模块间缺少逻辑控制,导致钻井管柱输送成功率较低,因此设计基于PLC技术的钻井管柱自动输送系统。
通过分析系统的基本功能需求,将PLC作为自动输送系统的控制核心,通过供电滑触线、管柱朝向检测模块、管柱翻转模块、管柱提升模块和PLC控制模块设计系统硬件部分,对模块间进行逻辑控制;在系统硬件设计基础上设计软件部分,根据自动输送系统的工作特点,对单根管柱与多层多列管柱的输送路径进行规划,结合系统硬件完成自动输送系统的设计。
实验结果表明:所设计的系统在不同输送速度下的总成功率都在98%以上。
【总页数】5页(P172-176)
【作者】吴枝国;薛程;盛益;刘鹏;吴德庆
【作者单位】中石化华东石油工程有限公司物资装备中心
【正文语种】中文
【中图分类】TD41
【相关文献】
1.基于PLC的海上钻井平台阀门自动智能控制系统设计
2.基于PLC的带式输送机输送带自动控制系统设计
3.基于PLC和气动技术的自动输送系统设计
4.钻井管柱自动输送装置的研制与应用
5.基于PLC的远程无线遥控自动钻杆输送系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
iii
目录
摘 要 ................................................................................................................................... i Abstract ................................................................................................................................ ii 第 1 章 绪论 ..........................................................................................................................1 1.1 课题研究背景及意义 .................................................................................1 1.2 双梯度钻井技术原理 .................................................................................2 1.3 国内外研究现状 .........................................................................................3 1.4 课题主要研究内容 .....................................................................................5 第 2 章 无隔水管钻井技术方案 ...........................................................................................7 2.1 浅水无隔水管钻井技术方案 ......................................................................7 2.2 深水无隔水管钻井技术方案 .................................................................... 18 2.3 本章小结................................................................................................... 28 第 3 章 海底泥浆举升系统分析与计算 ............................................................................. 30 3.1 3.2 3.3 3.4 海底泥浆举升系统水力学分析 ................................................................ 30 海底泥浆举升系统电力系统分析 ............................................................ 35 锚定系统受力分析 ................................................................................... 42 本章小结............................................................................................单位代码:10425 学 号:S10040618
无隔水管钻井泥浆举升系统设计与控制单元研究
Study on Riserless Mud-lift Drilling System Design and Control Unit
学科专业: 机械工程 研究方向: 海洋石油装备 作者姓名: 葛瑞一 指导教师: 陈国明 教授 李伟 副教授
Associate Professor
College of Mechanical & Electronic Engineering China University of Petroleum (East China)
独创性声明
本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。 尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其它人已经发表或撰 写过的研究成果, 也不包含为获得中国石油大学或其它教育机构的学位或证书而使用过 的材料。 与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并 表示了谢意。 若有不实之处,本人愿意承担相关法律责任。
ii
star/stop and liquid level automatic control, normal drilling conditions control, well kick and leakage detection. Experimental verified riserless drilling process. Key words: riserless drilling technology, subsea mud-lift system, hydraulics calculation, well control
日期: 日期:
年 年
月 月
日 日
无隔水管钻井泥浆举升系统设计与控制单元研究 摘 要
双梯度钻井技术在理论上可以解决传统海洋钻井技术在深水中遇到的技术难题。但 在诸多双梯度实现方法和系统中,仅有挪威 AGR 公司研究的无隔水管钻井技术得到广 泛的工业应用,获得显著的经济和环境效益。本文主要结合国家科技重大专项——大型 油气田及煤层气开发子课题海底泥浆举升钻井技术研究(2008ZX05026-001-12),开展无 隔水管钻井泥浆举升系统设计与控制单元研究。主要研究进展和成果如下: 1 无隔水管钻井技术方案 在跟踪和研究国外相关技术基础上,结合我国 500-1500m 水深钻井作业环境特点, 研究 500m 浅水无隔水管钻井方案及 1500m 深水无隔水管钻井方案, 包括总体的方案介 绍,主要设备、工艺流程和技术特点等。 2 海底泥浆举升系统分析计算 无隔水管钻井技术与常规钻井技术最大的不同在于拥有海底泥浆举升系统,是该技 术的关键难题。通过水力学计算获得泥浆返回管线的水力参数,并以此为依据设计电力 系统和信号通讯方案,最后进行力学分析,获得返回管线及海底锚块的结构参数。 3 无隔水管钻井井控技术 由于无隔水管钻井技术的特殊性,存在钻井过程中钻井液无法充满钻杆的情况,同 时供液泵在停泵后系统会出现 U 型管效应。 在井筒内水力学计算的基础上获得不同工况 下钻井液的流动情况及井内压力情况,研究 U 型管效应和浅层作业事故的应对方案。 4 浅水无隔水管钻井工艺模拟试验 在 SMD 试验平台的基础上进行改造,搭建 SRMD 工艺模拟试验平台。较系统地研 究无隔水管钻井系统的控制与监测技术,基于 LabVIEW 开发试验平台的软件系统。对 泵启停及液位自动控制、正常钻井工况控制、井涌井漏检测等无隔水管钻井工况进行模 拟试验,实现了无隔水管钻井工艺流程的验证。 关键词:无隔水管钻井技术;海底泥浆举升系统;水力学计算;井控
二〇一三年六月
Study on Riserless Mud-lift Drilling System Design and Control Unit
A Thesis Submitted for the Degree of Maste r
Candidate: Ge Ruiyi Supervisor: Professor Chen Guo-ming Li Wei
学位论文作者签名:
日期:
年
月
日
学位论文使用授权书
本人完全了解中国石油大学有关保留、使用学位论文的规定,即:学校有权保留送 交论文的复印件及电子版,允许论文被查阅和借阅;学校可以公布论文的全部或部分内 容,可以采用影印、缩印或其他复制手段保存论文。 (保密论文在解密后应遵守此规定)。
学位论文作者签名: 指导教师签名:
i
Study on Riserless Mud-lift Drilling System Design and Control Unit Abstract
Dual-gradient drilling technology can solve the problems associated with deepwater drilling in theory. It has been researched and developed at abroad in 1960s. Among all the implementation methods, only riserless drilling technology obtains a wide range of commercial applications at abroad, and access to significant economic and environmental benefits. The paper supported by the project of “Research on Subsea Mud -lift Drilling Technology (2008ZX0526-001-12)” sponsored by National Science and Technology Major Special Project. Undertakes the research of riserless drilling technology design and control unit, which is meaningful to the system. The main work is summarized as follows: 1. Proposals for riserless drilling technology in different water depth Based on studying of related technology abroad, combined with 500-1500m water depth drilling environmental characteristics, put forward new proposals for riserless drilling technology in different water depth. It includes the overall program, major equipment, drilling program, technical characteristics and so on. 2. Design of subsea mud-lift system The biggest difference between riserless drilling technology and conventional riser drilling technology is whether owns subsea mud-lift system on not. The system is the key challenges of the technology. The mud return pipeline Hydraulic parameters were got by Hydraulics calculation. It’s a basis for design of power systems and signal communications solutions. Mechanical analysis was done to obtain structural parameters of mud return pipeline and seabed anchor block. 3. Well control of riserless drilling technology Due to the special nature of riserless drilling technology, it exists the situation that drill pipe can’t be filled with drilling fluid. There is U-tube effect after the pump on deck stopped. We do wellbore hydraulics calculation to obtain the flow of drilling fluid and the well pressure situation under different conditions. We also study the response program of U-tube effect and the shallow-job accident. 4. Process simulation test of SRMD We transform SMD test platform into SRMD process simulation test platform. More systematic study of SRMD control and monitoring technology, we develop testing platform software system based on LabVIEW. Carried riserless mud-lift drilling test, include pump