毕业设计-- Y802-4 0.75 kW三相鼠笼式异步电动机设计
y802-40.75kw三相鼠笼式异步电动机设计()

三相鼠笼式异步电动机设计一、选题的依据及意义现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,作为动力设备的电机是不可缺少的一部分。
电机在国家经济建设,节约能源、环保和人民生中起着十分重要的作用。
发电机主要用于移动电源、风力发电、小型发电设备中;电动机在生产和交通运输中得到广泛使用,电动机主要用于驱动水泵、风机、机床、压缩机、冶金、石化、纺织、食品、造纸、建筑、矿山等机械产品上。
随着科学技术的不断创新和工农业的迅猛发展,电气化与自动化水平不断提高,国民经济各部门对异步电动机的需求量日益增加,对其性能,质量,技术经济指标也相应地提出了越来越高的要求。
因此,对异步电动机品种,必须适时实地做出更新与发展,以适应各个新兴工业领域不同的特殊要求,特别是对需求量最大的中小型异步电动机,在保证其质量运行,寿命长和能满足使用要求的同时,进一步节约铜、铁等材料,提高效率和功率因数,以提高其经济技术指标与降低耗电量,是具有十分重要的意义。
由于丫系列异步电动机具有体积小,重量轻,运行可靠,结构坚固耐用,外形美观等特点,具有较高的效率,有良好的节能效果,而且噪音低,寿命长,经久耐用。
作为普遍用于拖动各种机械的动力设备,其用电量在总的电网的总的负荷中占有重要的一席。
丫系列共有两个基本系列、十六个派生系列、九百多个规格,能满足国民经济各部门的不同需要。
所以设计研究三相异步电动机意义重大。
国内外研究现状及发展趋势(含文献综述)1、现状国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。
国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级,而且也考虑电机制造成本的降低等国内虽有部分产品已达90年代初的国际水平,但相当部分的产品可靠性差, 重量重,体积大和噪声大,综合水平只相当于80年代初期国际水平,其主要原因是制造工艺落后,关键材料的质量和品种不能满足要求,科研和设计工作没有跟上,科研投入少,新产品开发资金匮乏,企业技术创新能力较弱2、电机行业发展趋势1)企业在改造中求发展企业要自己选准位置,立足生求,真抓实干,稳步发展。
三相鼠笼式异步电动机实验报告
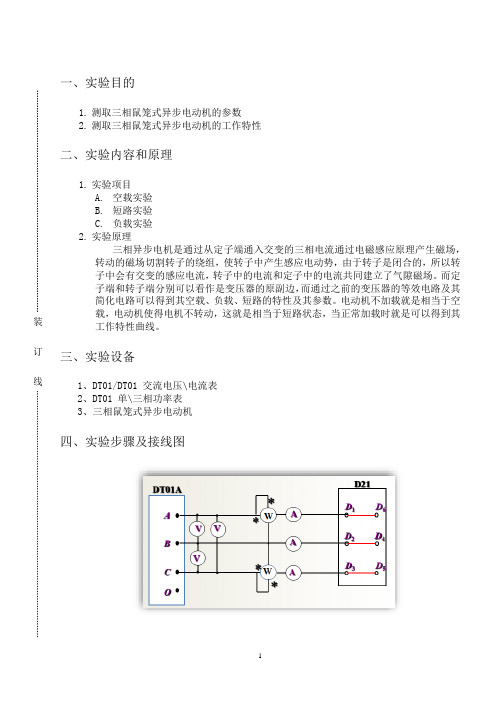
一、实验目的1.测取三相鼠笼式异步电动机的参数2.测取三相鼠笼式异步电动机的工作特性二、实验内容和原理1.实验项目A.空载实验B.短路实验C.负载实验2.实验原理三相异步电机是通过从定子端通入交变的三相电流通过电磁感应原理产生磁场,转动的磁场切割转子的绕组,使转子中产生感应电动势,由于转子是闭合的,所以转子中会有交变的感应电流,转子中的电流和定子中的电流共同建立了气隙磁场。
而定子端和转子端分别可以看作是变压器的原副边,而通过之前的变压器的等效电路及其简化电路可以得到其空载、负载、短路的特性及其参数。
电动机不加载就是相当于空载,电动机使得电机不转动,这就是相当于短路状态,当正常加载时就是可以得到其工作特性曲线。
三、实验设备1、DT01/DT01 交流电压\电流表2、DT01 单\三相功率表3、三相鼠笼式异步电动机四、实验步骤及接线图装订线1.空载实验将三相交流电压调到输出为“0”伏,并选择交流电表量程。
缓慢起动电机并观察电动机的旋转方向是否符合要求,否则应切断电源,调整三相电源相序。
测取三相鼠笼式异步电动机空载特性。
U=1.2UN ——> U=0.3UN。
测取电动机的空载电压、空载电流、空载功率,共测取7~8 组数据。
注意:其中额定电压U=UN 点必测。
2.短路实验将电机与测功机同轴联接,旋紧低脚固定螺钉,并用销钉(黄铜棒)把测功机的定子和电机转子销住。
此时电机的旋转方向应正确。
选择交流电表量程。
测取三相鼠笼式异步电动机短路特性。
I=1.2IN ——> I=0.3IN。
测取电动机的短路电压、短路电流、短路功率共4~5 组数据。
注意:其中短路电流等于额定电流I=IN 的点为必测点。
注意:短路实验动作要迅速,以免定子绕组可能过热。
3.负载实验拆除安装在测功机上的销钉。
选择交流电表量程。
测取三相鼠笼式异步电动机工作特性。
接通电源,起动电机,注意电机的旋转方向;调测功机加载,从I=1.5IN 至空载,测取异步电动机的定子电流、输入功率、转速、输出转矩共5~6 组数据。
毕业设计(论文)-三相异步电动机星三角启动

江西农业工程职业学院毕业论文(设计)三相异步电动机星三角启动学生指导教师专业机电一体化层次大学专科班级 09大专机电2班学号日期 2012.4.12江西农业工程职业学院科研处制三相异步电动机工作特性摘要异步电动机具有结构简单、制造容易,运用可靠、效率较高,价格低廉,坚固耐用等优点。
它在工农业和日常生活中获得最为广泛的应用。
在电网的总负荷中,异步电动机用电量约占60%以上。
本文是对三相异步电动机做出深入的剖析与设计。
三相异步电动机是一种具有高效率、低磨损、低噪声的电机机种.本设计在介绍三相异步电动机设计中,关于相数、极数、槽数及绕组连接方式的选择方法和应遵从的规律.而且针对电动机结构特点和工作性能,在电枢反应理论基础上设计出功率为7.5KW的交流电动机。
【关键词】设计三相异步电动机一.异步电动机存在的缺点1-1.笼型感应电动机存在的主要缺点。
(1)起动转矩不大,难以满足带负载起动的需要。
当前社会上解决该问题的多数办法是提高电动机的功率容量(即增容)来提高其起动转矩,这就造成严重的“大马拉小车”,既增加购买设备的投资,又在长期的应用中因处于低负荷运行而浪费大量电量,很不经济。
第二种办法是增购液力偶合器,先让电动机空载起动,在由液力偶合器驱动负载。
这种办法同样要增加添购设备的投资,并因液力偶合器的效率低于97%,因此至少浪费3%的电能,因而整个驱动装置的效率很低,同样浪费电量,更何况添加液力偶合器之后,机组的运行可靠性大大下降,显著增加维护困难,因此不是一个好办法。
(2)大转矩不大,用于驱动经常出现短时过负荷的负载,如矿山所用破碎机等时,往往停转而烧坏电动机。
以致只能在轻载状况下运行,既降低了产量又浪费电能。
(3)起动电流很大,增加了所需供电变压器的容量,从而增加大量投资。
另一办法是采用降压起动来降低起动电流,同样要增加添购降压装置的投资,并且使本来就不好的起动特性进一步恶化。
1-2.绕线型感应电动机绕线性感应电动机正常运行时,三相绕组通过集电环短路。
三相异步电动机毕业设计

三相异步电动机毕业设计三相异步电动机毕业设计在电机领域,三相异步电动机是一种常见且重要的设备。
它广泛应用于工业、农业、交通等领域,是现代社会不可或缺的动力源。
本文将探讨三相异步电动机的毕业设计,包括设计背景、设计目标、设计方法和设计结果等方面。
一、设计背景三相异步电动机是一种通过电磁感应原理工作的电动机。
它的工作原理是利用电流在绕组中产生的磁场与定子磁场相互作用,产生转矩从而驱动机械设备。
在工业生产中,三相异步电动机通常用于驱动各种负载,如泵、风机、压缩机等。
因此,设计一台性能稳定、效率高的三相异步电动机对于提高生产效率和降低能源消耗具有重要意义。
二、设计目标本次毕业设计的目标是设计一台额定功率为5千瓦的三相异步电动机。
通过合理的设计和优化,实现以下目标:1. 提高电机的效率:通过选用合适的磁材料和绕组结构,减小电机的铜耗和铁耗,提高电机的效率。
2. 提高电机的起动性能:通过设计合理的起动装置,减小电机的起动电流,提高电机的起动性能。
3. 提高电机的负载能力:通过优化电机的结构和材料,提高电机的承载能力,使其能够适应更大的负载。
三、设计方法为实现上述目标,本设计采用了以下方法:1. 磁路设计:根据电机的额定功率和转速要求,选择合适的磁材料和磁路结构,以减小磁场损耗和铁耗。
2. 绕组设计:通过合理的绕组设计,减小电机的铜耗和电阻,提高电机的效率。
3. 起动装置设计:采用软起动器等起动装置,减小电机的起动电流,提高电机的起动性能。
4. 结构优化:通过优化电机的结构和材料,提高电机的负载能力,使其能够适应更大的负载。
四、设计结果经过设计和优化,本次毕业设计成功地设计出了一台额定功率为5千瓦的三相异步电动机。
该电机具有高效率、良好的起动性能和较大的负载能力。
实验结果表明,该电机的效率达到了90%以上,起动电流小于额定电流的1.5倍,能够承载额定负载的1.2倍。
五、总结通过本次毕业设计,我深入学习了三相异步电动机的原理和设计方法。
三相异步牵引电动机毕业设计

摘要随着电机控制技术的不断发展,在实际中应用越来越多的交流调速系统已经取代了直流调速系统。
由于异步电机是一种复杂的多变量的、强耦合的非线性系统,所以利用计算机仿真的办法构造一个实验系统进行异步电机的分析是一种很好的研究手段。
本文主要首先介绍三相异步牵引电动机结构和构造建立电机数学、物理模型,对比直流电机电磁转矩和异步电动机电磁转矩,结合矢量控制的基本思想和基本概念,完成了对三相交流异步牵引电动机在三相静止坐标和两相静止坐标系上的数学模型,经过坐标转换得到交流牵引电机的模型。
然后通过Matlab/Simulink的模块简化搭建功能完成三相异步牵引电动机最终的仿真模型,并在Mutlab系统环境下实现对电动机的仿真,观察异步电机空载转矩和负载转矩过程中的电流、转速、转矩的变化,对结果与理论结果进行比对分析,证实了该方法的简便直观、高效快捷和真实准确性。
关键词:异步电机;建模;仿真;坐标变换;AbstractWith the development of motor control technology, AC drive system is used more and more in practice has replaced the DC speed regulating system. The asynchronous motor is a strongly coupled nonlinear system is a complex multivariable, using the way of constructing, analysis and computer simulation of an experimental system of asynchronous motor is a very good research tools.This paper first introduces the structure and the structure of three phase a synchronous traction motor mathematical, physical model of motor, compared with DC motor electromagnetic torque and asynchronous motor electro magnetic torque, combined with the basic theory of vector control and the basic concept,the mathematical model in the three-phase static coordinate and two-phase static coordinate system on the three phase asynchronous traction motor, the AC traction the motor model to get the coordinate conversion. Then through the Matlab/Simulink module to simplify the building function to finish the simulation model of the three-phase asynchronous traction motor end, and realize the simulation of the motor in the environment of Mutlab system, variable current,speed, torque of asynchronous motor load torque and load torque in the process, the results were compared with the theoretical results and analysis,confirmed this method simple and intuitive, fast and accurate.KeyWords: Induction motor, Modeling, Simulation, Coordinate transformation目录摘要 (I)Abstract .............................................................................................................................. I I 目录.. (III)1 绪论 (1)1.1研究背景及意义 (1)1.2 国内外研究现状 (1)1.3本论文研究的主要内容 (1)2三相异步电机的构造和工作原理 (2)2.1 三相异步电机的结构和原理 (2)2.1.1三相异步电机的结构 (2)2.1.2三相异步牵引电机工作原理 (2)2.2 三相异步电机的数学模型 (2)2.2.1 三相异步电机在两相静止坐标系上的数学模型 (2)2.2.2 三相异步电机在三相静止坐标系上的数学模型 (3)3 三相牵引电机的建模和仿真 (5)3.1 三相异步牵引电动机模型 (5)3.1.1模型坐标变换 (5)3.1.2建立模型 (5)3.1.3建立s函数以及电机模型 (7)4 仿真结果及其分析 (11)4.1三相输入电流在不同坐标上的波形图 (11)4.2 三相输入电压子在同一坐标下的波形图 (11)4.3 电动机理论输出波形 (12)4.5结果分析 (13)4.6总结 (13)致谢 (14)参考文献 (15)1 绪论1.1 研究背景及意义由于直流调速的局限性和交流调速的优越性,交流异步电动机在实际的需求下得到了很大的发展。
三相鼠笼式异步电动机电磁计算及其优化
毕业设计(论文)( 2015届)题目三相鼠笼式异步电动机电磁计算及其优化学号 1101230122姓名杜杰辉所属系电气与电子信息学院专业电气工程及其自动化班级 11电气本(一)班指导教师裴建良摘要本论文介绍了三相鼠笼异步电机的设计,并对其工作原理和与其他类型的电机比较来展现了它的特点和用途。
之后对其结构进行了简单的介绍。
从而由各个方面分析三相鼠笼异步电机,为下一步关于电动机的设计做了铺垫。
关于电机的设计,其中的因素需要从多个方面考虑,并且电动机的外部结构和内部数据分析比较复杂,所以在分析的时候比较繁琐。
本论文將从多个角度分析这些问题。
充分的调节电动机的耗量与其他指标之间的关系。
通过对典型电动机铭牌数据,并通过对典型电动机铭牌数据的分析计算。
从而达到下一步的优化。
本文从经济与效率两个角度,全面的剖析了电动机的优化,最后做出一个优化方案。
最后,本文还通过一些工具以及相关图表,对电动机进行了深入的分析。
关键词:异步电动机;设计;优化;AbstractKeywords: induction motor; design;optimize;第一章前言电动机一般由两种电机形式组成,分别是直流电机和交流电机。
生活中结构不同,主要是在转子上,鼠笼式的转子是铸铝的,用铜线绕制的绕线式,外接电阻接在转子上的三个铜环上。
它的作用是用来调整转速。
起动转矩越大,起动电流越小。
鼠笼式电机则与绕线式相反。
绕线式的转子和定子绕组在结构上基本相同,一模一样的道理三相绕组是Y 星连接方式,它的三根端线在转轴上的铜环上,与外电路接通的方式是通过电刷的。
鼠笼式电机得到广泛的应用,是因为他的结构简单,价格也比较实惠,而且容易控制。
相反绕线式的应用就少一点,因为它的结构复杂,价格也比较贵,而且电机运行的时候不容易控制。
所以用的比较少。
但是有些地方也会使到绕线式,一般在重负荷的情况下,因为绕线式他的运行力矩比较大。
鼠笼式这种电动机的优点是简单,成本低,使用时间长。
毕业设计(论文)-农作物清洗机的设计

农作物清洗机是关于清洗收割后的农作物的机械,是农业自动化加工的重要器械之一。
为了实现高效率、全自动地清洗农作物,设计一种链板式的传送带气泡清洗机, 以便于后续的加工与流水线作业。
本设计基于农业自动化机械的研讨现状和发展状况, 再按照农作物清洗机的清洗需求及任务特点,与相关文献及手册相结合,选择电动机, 设计链轮、轴,完善清洗机设计。
气泡清洗机适合清洗叶类、豆荚类、根茎类、瓜果类等农作物。
主要的结构有电动机,减速器,链式输送带为主,其中输送带使用冲孔不锈钢链板结构。
设计的重点在于整体机械的结构设计,难点在于轴的设计计算与校核。
需要计算出转速、功率、转矩等。
设计完成之后需要用计算机三维辅助设计来制作清洗机的三维建模,建模用的软件是CATIA。
最后CAD软件参考三维建模的投影,绘制二维的装配图与零件图。
关键字:气泡清洗机;计算机三维辅助设计;冲孔不锈钢板AbstractThe crop cleaning machine is about cleaning the harvested crops, is one of the important equipment of agricultural automation processing. In order to achieve high efficiency and automatic cleaning of crops, a chain plate conveyor belt bubble cleaning machine is designed to facilitate subsequent processing and assembly line operation. This design is based on the current situation and development of agricultural automation引言 --------------------------------------------------------------------- 1第一章绪论---------------------------------------------------------------- 2 1.1 农作物清洗机的现状 -------------------------------------------------- 2 1.2 农作物清洗机设计要求------------------------------------------------ 41. 3农作物清洗机类型的选择 ---------------------------------------------- 42. 4气泡清洗机的工作原理和机理 ------------------------------------------ 4第二章主要结构设计-------------------------------------------------------- 63. 1电动机功率的初步计算------------------------------------------------ 62.1.1计算传送带驱动滚筒轴的功率 --------------------------------------- 62. 1.2计算电动机的功率------------------------------------------------- 6 2.2 电动机的选择 ------------------------------------------------------- 7 2.3 减速器的选择 ------------------------------------------------------- 7 2.4 传动方案的选择 ----------------------------------------------------- 8 2.5 链传动的设计计算 --------------------------------------------------- 82. 5. 1确定传动比和链轮的转速 ------------------------------------------ 82. 5. 2确定链传动的计算功率 -------------------------------------------- 82. 5. 3确定链条的型号和节距 -------------------------------------------- 92. 5.4计算链速--------------------------------------------------------- 92. 5.5计算链节数和中心距----------------------------------------------- 92. 5.6确定润滑方式----------------------------------------------------- 92. 5. 7计算链传动作用在轴上的压轴力 ------------------------------------ 92. 5. 8确定链轮的材料及热处理方式 ------------------------------------- 102. 5. 9计算链轮的几何尺寸 --------------------------------------------- 102. 5. 10链传动的失效形式 ---------------------------------------------- 10 2. 6轴的设计计算 ------------------------------------------------------- 112. 6.1初步计算轴径---------------------------------------------------- 112. 6. 2轴的结构设计 --------------------------------------------------- 112. 6. 3轴的强度校核计算 ----------------------------------------------- 12 2. 7键的选择与校核----------------------------------------------------- 162. 7.1减速器输出轴与主动链轮的键的选择与校核-------------------------- 162. 7. 2主轴与从动链轮之间的键的选择与校核 ----------------------------- 172. 7. 3主轴与主动带轮之间的键的选择与校核 ----------------------------- 17 2. 8滚动轴承的选择与校核计算------------------------------------------- 172. 8.1滚动轴承类型的选择方式------------------------------------------ 172. 8. 2轴承型号的选择 ------------------------------------------------- 172. 8. 3轴承寿命的校核计算--------------------------------------------- 18第三章其他结构的选择和设计----------------------------------------------- 202.1 传送带的选择和设计------------------------------------------------- 203. 1. 1网带的选择----------------------------------------------------- 203.1.2 网带带轮的设计计算--------------------------------------------- 203.1.3 网带的设计计算------------------------------------------------- 21 3. 2气泡发生装置的选择------------------------------------------------- 22 3.3整体水槽的设计------------------------------------------------------ 23第四章计算机三维模型设计------------------------------------------------- 24 5. 1三维软件概述------------------------------------------------------- 24 5. 2三维模型零件的设计与组装------------------------------------------- 24第五章机电传动控制部分--------------------------------------------------- 25结论 -------------------------------------------------------------------- 27参考文献 ---------------------------------------------------------------- 28谢辞 -------------------------------------------------------------------- 29随着农业自动化的发展,在这生产量庞大的条件下,用人类的劳动力来清洗农作物显然是不可能的,机械设备在我们生活的地位越来越高,农业机械极大地提高了农业劳动生产率。
75kW三相鼠笼异步电机设计

本科毕业设计7.5kW三相鼠笼异步电机设计学生姓名:学生学号:院(系):年级专业:指导教师:二〇〇七年六月摘要电机在各行各业的广泛应用,推动了中小型电机行业的发展不断壮大,因此研究中小型电机存在重大意义。
本课题主要是在熟悉三相异步电动机的原理的基础上,根据设计要求设计一台小型三相鼠笼式异步电动机。
首先确定电机的电磁负荷和电机的主要尺寸,然后分别对电机绕组、电机铁心进行设计,并且对设计电机的参数、工作性能进行核算,反复调整,直到设计的参数符合设计任务的要求。
在初选方案的基础上改变气隙大小、改变定子匝数、和改变铁心长度进行了几个方案设计,最后对所有设计方案进行比较,优化设计。
关键词电机、电磁设计、改变参数ABSTRACTThe electrical machinery in all the various trades' and occupations'widespread application, impelled the middle and small scale electricalmachinery profession development unceasingly to expand, thereforestudied the middle and small scale electrical machinery existencegreat significance. This topic mainly is in the familiar three-phaseasynchronous motor principle foundation, according to designs therequest to design a small three-phase mouse cage type asynchronousmotor. First determined the electrical machinery the electromagnetismload and the electrical machinery main dimension, then separately tothe electrical machinery winding, the electrical machinery iron corecarries on the design, and to designs the electrical machinery theparameter, the operating performance carries on the calculation,repeatedly adjusts, conforms to the design duty requirement until thedesign parameter. Changed the air gap size, the change stator numberof windings in the primary election plan foundation, and the changecore length has carried on several plans designs, finally carried onthe comparison to all design proposal, the optimized design.Key word Electrical machinery, electromagnetism design, changeparameter目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 课题设计背景 (1)2 国内外鼠笼型异步电动机的发展状况 (2)2.1电机在国外的发展状况及趋势 (2)2.2我国电机的发展状况及趋势 (3)2.3中小型的发展状况及趋势 (4)3 电磁设计 (5)3.1额定数据和主要尺寸 (5)3.1.1额定数据 (5)3.1.2主要尺寸 (6)3.2磁路设计 (13)3.2.1面积计算 (13)3.2.2磁密计算 (14)3.3参数计算 (18)3.3.1定子线圈次寸 (18)3.3.2漏抗计算 (19)3.3.3空载特性计算 (25)3.4工作性能计算 (26)3.4.1电流计算 (26)3.4.2损耗计算 (27)3.5起动性能计算 (29)4 改变参数 (33)4.1改变气隙大小的设计方案 (33)4.2改变定子匝数的设计方案 (39)4.3改变铁心长度设计方案 (44)5 电子计算机在电机设计计算中的应用 (49)5.1概述 (49)5.2设计分析程序 (52)5.2.1算程序改编成计算程序 (52)5.2.2图的作用与编制原则 (52)5.2.3下面以起动性能计算为例进行编程设计 (54)结论 (54)参考文献 (55)致谢 (56)1 绪论1.1 课题设计背景(1)设计要求是:额定功率为7.5kW,额定电压为380V,相数3相,额定频率为50Hz,联结方式为三角形,额定效率为88%,功率因数为0.85。
75kW三相鼠笼异步电动机设计

本科毕业设计(论文)75kW三相鼠笼异步电动机设计学生姓名:学生学号:院(系):电气信息学院年级专业: 2009级电气工程与自动化指导教师:二〇一三年六月摘要本论文介绍了Y系列三相鼠笼异步电动机的设计方法,文章首先从异步电机的基本理论以及工作特性着手,简单介绍了异步电动机的发展近况、基本特性、类型、用途、结构、技术指标、工作原理及运行特性等,这为电机的设计做好必要的理论准备。
电动机的设计是个复杂的过程,需要考虑的因素和确定的尺寸、数据很多,因此往往会遇到错综复杂的矛盾。
而本文全面地、综合地看待了这个问题,在电动机的耗材量与各项性能之间以及技术指标和经济指标之间的关系作了充分的协调。
作者先按照电动机的电磁手算程序进行手算工作,了解了国家的相关标准规定,熟悉了电动机各项性能指标之间的大致关系,为优化方案打了个基础。
在主要尺寸、气隙磁密以及定转子绕组和铁心绕组设计好以后,就要进行起动性能的计算和工作性能的计算。
三相鼠笼异步电动机的起动性能主要是指起动转矩和起动电流对相应额定值的倍数。
三相鼠笼异步电动机的起动特性则由电机的参数决定。
关键词异步电动机,电磁程序,优化方案,工作性能,起动性能ABSTRACTIn this paper, Y series three-phase squirrel-cage induction motor design method is introduced, the article ,first of all, from the basic theory of induction motor characteristics and the work to proceed, briefly introduced the latest development of the induction motor, the basic characteristics, type, structure, technical indicators, the working principle and operation characteristics, designed for the motor to make the necessary preparations for the theory .Designing a motor is a complex process. The designer must consider many factors and lots of sizes and data, so often encounter complicated contradictions. However, this study treats the problem all-sided and synthetically, and mades adequate coordination between economic indicators and technical indicators and between the motor and the amount of supplies between the performance . On the first hand calculated according to the electromagnetic motor hand count procedures work, to understand the provisions of the relevant national standards, are familiar with the approximate relationship between motor performance indicators for the optimization program called foundation. In good main dimensions, flux density and rotor windings and core winding design future, it is necessary to calculate performance computing and work starting performance. Three-phase squirrel cage induction motor starting performance mainly refers to the starting torque and starting current rating of the corresponding multiples. Three-phase squirrel cage induction motor starting characteristics is desided by the motor parameters.Key words Induction motor, Electromagnetic program, Optimization program,Working performance, Starting performance目录摘要 (I)ABSTRACT (II)1 绪论 (1)2 异步电动机设计概述 (2)2.1三相异步电动机的发展趋势 (2)2.2三相异步电动机的结构和用途 (2)2.2.1异步电动机的结构 (2)2.2.2异步电动机用途 (4)3 三相异步电动机的工作原理和运行特性 (5)3.1三相异步电动机的工作原理 (5)3.2三相异步电动机的工作特性 (6)4 三相鼠笼异步电动机电磁计算程序 (7)4.1额定数据及主要尺寸 (7)4.1.1 主要性能参数 (7)4.1.2 电机的主要尺寸选择 (7)4.1.3定子绕组与槽形的计算 (10)4.1.4转子槽形与绕组的计算 (12)4.2磁路计算 (13)4.3参数计算 (16)4.3.1线圈尺寸计算 (16)4.3.2电机定、转子绕组漏抗计算 (17)4.3.3有效材料的计算 (19)4.3.4异步电机空载特性计算 (20)4.4工作性能计算 (21)4.4.1电负荷计算 (21)4.4.2电机损耗计算 (21)4.4.3其它性能指标的计算 (22)4.5起动性能计算 (23)4.5.1起动时定子参数 (23)4.5.2起动时转子参数 (24)4.5.3起动参数的确定 (25)5 三相鼠笼异步电动机优化方案及电磁调整 (26)5.1设计方案优化 (26)5.2电磁方案的调整 (26)结论 (29)参考文献 (30)附录A (31)致谢 (34)1 绪论现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,电机作为动力设备而言是不可或缺的一部分。
毕业设计 三相鼠笼式异步电动机的起动PLC控制

毕业设计三相鼠笼式异步电动机的起动PLC控制网络教育学院专科生毕业论文(设计)题目:三相鼠笼式异步电动机的起动PLC控制目录内容摘要 .....................................................................错误!未定义书签。
第一章引言 (4)第二章可编程控制器的介绍 (5)2.1 可编程控制器的产生 (5)2.2 可编程控制器的发展 (7)2.3 可编程控制器的用途 (8)2.4 可编程控制器的性能特点 (9)2.5 PLC的工作原理 (11)2.6 PLC的编程语言 (12)2.7 PLC的接入方式 (12)2.8 PLC编程 (13)第三章可编程控制器的基本指令介绍 (16)第四章程序设计 (17)结束语 (21)参考文献 (22)内容摘要本文是根据三菱FX系列PLC的特点,分析了三相异步电动机的星一三角形”降压启动工作原理及硬件配置,介绍了采用PLC进行继电器控制系统改造的基本方法,结合实际应用总结PLC应用系统设计的一般步骤。
分析了PLC在三相异步电动机的星一三角形”降压启动控制中的应用,并从梯形图语言、指令表语言以及电气原理图三个方面加以说明。
关键词:PLC;星一三角形”降压启动;继电器控制系统;三相异步电机;梯形图语言;指令表语言;电气原理图第一章引言可编程序控制器(PLC,Programmable IJo画c Controller)是一种专为在工业环境下应用而设计的数字运算操作控制系统。
它采用一种可编程的存储器,在其内部存储执行逻辑运算,它以顺序控制为主,回路调节为辅.能完成逻辑判断、定时、记忆和算术运算等功能。
PLC 的生产厂家和型号、种类繁多.不同型号自成体系,有不同的程序语言和使用方法.本文采用三菱FX系列PLC为例,分析PLC在三相异步电机星一三角形”降压启动控制中的应用.第二章可编程控制器的介绍2.1可编程控制器的产生早期工业控制中采用的继电器控制系统属于固定接线的逻辑控制系统,控制系统的结构随功能的不同而不一样。
y802-4 0.75 kw三相鼠笼式异步电动机设计()

三相鼠笼式异步电动机设计一、选题的依据及意义现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,作为动力设备的电机是不可缺少的一部分。
电机在国家经济建设,节约能源、环保和人民生中起着十分重要的作用。
发电机主要用于移动电源、风力发电、小型发电设备中;电动机在生产和交通运输中得到广泛使用,电动机主要用于驱动水泵、风机、机床、压缩机、冶金、石化、纺织、食品、造纸、建筑、矿山等机械产品上。
随着科学技术的不断创新和工农业的迅猛发展,电气化与自动化水平不断提高,国民经济各部门对异步电动机的需求量日益增加,对其性能,质量,技术经济指标也相应地提出了越来越高的要求。
因此,对异步电动机品种,必须适时实地做出更新与发展,以适应各个新兴工业领域不同的特殊要求,特别是对需求量最大的中小型异步电动机,在保证其质量运行,寿命长和能满足使用要求的同时,进一步节约铜、铁等材料,提高效率和功率因数,以提高其经济技术指标与降低耗电量,是具有十分重要的意义。
由于Y系列异步电动机具有体积小,重量轻,运行可靠,结构坚固耐用,外形美观等特点,具有较高的效率,有良好的节能效果,而且噪音低,寿命长,经久耐用。
作为普遍用于拖动各种机械的动力设备,其用电量在总的电网的总的负荷中占有重要的一席。
Y系列共有两个基本系列、十六个派生系列、九百多个规格,能满足国民经济各部门的不同需要。
所以设计研究三相异步电动机意义重大。
国内外研究现状及发展趋势(含文献综述)1、现状国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。
国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级,而且也考虑电机制造成本的降低等国内虽有部分产品已达90年代初的国际水平,但相当部分的产品可靠性差,重量重,体积大和噪声大,综合水平只相当于80年代初期国际水平,其主要原因是制造工艺落后,关键材料的质量和品种不能满足要求,科研和设计工作没有跟上,科研投入少,新产品开发资金匮乏,企业技术创新能力较弱2、电机行业发展趋势1)企业在改造中求发展企业要自己选准位置,立足生求,真抓实干,稳步发展。
「三相鼠笼式异步电动机设计实例」
「三相鼠笼式异步电动机设计实例」鼠笼式异步电动机是一种常见的三相感应电动机,由于其结构简单、耐久可靠、成本较低等特点,在工业领域得到了广泛应用。
本文将以三相鼠笼式异步电动机的设计实例为主题,详细介绍其设计原理和步骤。
首先,我们需要确定设计的目标和参数。
假设我们要设计一台额定功率为20kW、三相380V、50Hz的鼠笼式异步电动机。
根据这些参数,我们可以开始设计。
第一步是确定定子绕组的电气参数。
根据所给的电压和功率,可以计算出对应的电流值。
假设我们要求电流密度为6 A/mm²,根据功率和电压得到额定电流值为40 A,根据定子槽数的设计要求,可以计算出定子绕组的导体截面积。
第二步是计算定子槽数和转子槽数。
一般来说,定子槽数和转子槽数的比值在2.5~3之间。
根据这个比值,我们可以计算出定子和转子的槽数。
第三步是确定空载电流和满载电流的比值。
一般来说,空载电流和满载电流的比值范围为1.4~1.8、根据给定的功率和额定电流值,可以计算出空载电流和满载电流。
第四步是确定磁链密度和定子绕组的电磁参数。
磁链密度是电机设计中的一个重要参数,它会影响电机的输出功率、效率和性能。
根据给定的功率和电压,可以计算出磁链密度。
然后,根据导体截面积和定子槽数,可以计算出定子绕组的电阻、电感和导纳。
第五步是确定转子电阻和转子槽数。
转子电阻是电机设计中的另一个重要参数,它会影响电机的起动性能和负载特性。
根据给定的功率和电压,可以计算出转子电阻。
然后,根据转子电阻和转子槽数,可以计算出转子的电感和电纳。
第六步是根据电磁参数,计算出电机的等效电路参数。
这些参数包括定子和转子的电阻、电感和导纳。
通过电机的等效电路参数可以进行电机的性能分析和计算。
第七步是进行电机的磁路设计。
根据所给的电压和功率,可以计算出磁路的长度、磁链密度和磁通。
根据磁路的长度和磁链密度,可以确定磁路的尺寸和磁通。
第八步是进行电机的槽设计。
根据定子和转子的槽数,可以确定槽的尺寸和形状。
电动机毕业设计
电动机毕业设计【篇一:电机设计毕业论文】目录摘要 ....................................................................................................... .. (1)abstract ............................................................................................. . (1)第一章中小型电机设计概述 ....................................................................................................... . (2)1.1设计技术要求 ....................................................................................................... .. (2)1.2电机主要尺寸 ....................................................................................................... .. (2)1.3 绕组构及成原理 ....................................................................................................... (4)1.4主磁路 ....................................................................................................... .. (4)1.5电抗 ....................................................................................................... (6)1.7通风散热 ....................................................................................................... . (7)第二章三相异步电动机设计(y180l-6/15kw) (9)2.1电机主要尺寸及绕组设计 ....................................................................................................... (9)2.2电磁计算步骤与程序 ....................................................................................................... .. (9)第三章电机优化设计方案 ....................................................................................................... (28)3.1相关理论分析 ....................................................................................................... (28)3.2电磁调整方案 ....................................................................................................... (28)第四章 autocad简介及其绘图 ....................................................................................................... .. (30)4.1 autocad简介 ....................................................................................................... (30)4.2 autocad的基本功能 ....................................................................................................... (30)4.3 autocad绘图 ....................................................................................................... (31)总结 ....................................................................................................... . (32)参考文献: .................................................................................................... .. (32)附录(Ⅰ)外文资料原文及译文 ....................................................................................................... .. 34附录(Ⅱ)三设计方案结果 ....................................................................................................... . (39)三相鼠笼式异步电动机设计(y180l-6 /15kw)专业:电气工程极其自动化学号:02131107 学生姓名:刘常洲指导老师:肖倩华摘要异步电机是工农业生产中应用最广泛的电机。
Y802-4 0.75 kW三相鼠笼式异步电动机毕业设计
目录(行间距字体大小,页码要与文中照应)摘要不要放在目录里,放在目录前面一页摘要 (2)前言 (3)第一章概述 (4)1.1我国电机制造工业发展近况与发展趋势 (4)1.2 电机的分类 (4)第二章三相异步电动机的简介 (6)2.1三相异步电动机的结构和用途 (6)2.1.1异步电动机结构 (6)2.1.2异步电动机用途 (7)2.2三相异步电动机的基本工作原理和运行特性 (7)2.2.1 基本工作原理 (7)2.2.2三相异步电动机的工作特性 (8)2.3 三相异步电动机的起动与调速 (9)2.3.1三相异步电动机的起动 (9)2.3.2三相异步电动机的调速 (9)2.4感应电动机的主要性能指标和额定参数 (11)2.5电机节能 (11)第三章三相鼠笼式异步电动机的设计方法 (13)3.1 电磁负荷的选择与匹配 (13)3.1.1电磁负荷对电机性能和经济性的影响 (13)3.1.2 电磁负荷的选择 (13)3.1.3 电荷负荷的匹配 (14)3.2 主要尺寸、气隙长度的选取及绕组型式的选择 (14)3.2.1主要尺寸的选择 (14)3.2.2 气隙长度的选取及确定 (15)3.2.3铁心尺寸 (15)3.2.4定子绕组形式和节距的选择 (16)3.3 笼型转子的尺寸设计 (17)3.3.1 转子槽数选择及定转子槽配合问题 (17)3.3.2 转子槽形的选择和槽形尺寸的确定 (18)总结 (20)致谢 (21)Y802-4 0.75 kW三相鼠笼式异步电动机设计摘要本文介绍了Y系列三相鼠笼异步电动机的设计方法,文章首先从异步电机的基本理论及工作特性着手,简单介绍了异步电机的发展近况、基本特性、类型、结构、用途、技术指标、工作原理及运行特性等,为电机设计的做好必要的理论准备。
电机设计是个复杂的过程,因此需要考虑的因素、确定的尺寸和数据很多。
同时本文也详细阐述了三相鼠笼异步电动机的设计改进调整方案,以及计算机辅助工具的应用,这给电机设计和优化带来了新的契机。
电气-毕业论文-三相鼠笼式异步电动机PLC控制系统设计

5。故障现象预处理:
(1)不启动;原因之一,检查控制保险FU是否断路,热继电器FR接点是否用错或接触不良,SB1按钮的常闭接点是否不良。原因之二按纽互锁的接线有误。
(2)起动时接触器“叭哒”就不吸了;这是因为接触器的常闭接点互锁接线有错,将互锁接点接成了自己锁自己了,起动时常闭接点是通的接触器线圈的电吸合,接触器吸合后常闭接点又断开,接触器线圈又断电释放,释放常闭接点又接通接触器又吸合,接点又断开,所以会出现“叭哒"接触器不吸合的现象.
图2—2 PLC控制系统框图
2.传统继电器控制
继电器—接触器控制系统是由接触器、继电器、主令电器和保护电器按照一定的控制逻辑接线组成的控制系统.其工作原理就是采用硬接线逻辑,利用继电器触点的串联或并联,及延时继电器的滞后动作等组成控制逻辑,从而实现对电动机或其他机械设备的起动、停止,反向、调速及多台设备的顺序控制和自动保护功能。
本文研究的这个系统的控制是采用PLC的编程语言—-——梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程.
星-角降压启动的优点是不需要添置启动设备,有启动开关或交流接触器等控制设备就可以实现,缺点是只能用于三角形连接的电动机,大型异步电机不能重载启动。
综合多种因素,本设计应选择星-三角降压启动来实现异步电动机的正反转和点动控制。
三相异步电动机的设计毕业设计
毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
三相鼠笼异步电机正反转及能耗制动课程设计终稿
三相鼠笼式异步电动机正反转及能耗制动电气控制系统班级学号:2010084030001 姓名:陈国强2010084030002 郭兴2010084030003 谌鸿强一、系统设计方案异步电机主要用作电动机,拖动各种生产机械。
异步电动机的优点是结果简单、容易制造、价格低廉、运行可靠、坚固耐用、运行效率较高且适用性强,缺点是功率因数较差。
三相异步电动机启动过程中会出现较大的电流,对电动机本身会有一定的影响。
由于异步电动机不存在换向问题,对不频繁启动的异步电动机来说,短时大电流没什么关系;对频繁启动的异步电动机,频繁出现短时大电流会使电动机内部过热,但是,只要限制每小时最高启动次数,电动机还是能承受的。
因此,只考虑电动机本身,是可以直接启动的。
但下面两种情况下,三相异步电动机直接启动是不可行的:①变压器与电动机容量之比不足够大;②启动转矩不能满足要求。
对于第①种情况,需要减小启动电流,第②种情况需要加大启动转矩。
本设计中不属于以上两种情况且不存在频繁启动的问题,故采用直接启动。
对于鼠笼异步电动机的控制方式有多种,常见的有PLC控制盒传统继电器控制,这里采用PLC控制方式。
主要设计步骤如下:1、主电路设计2、电路参数估算3、根据参数选择元器件4、PLC控制电路设计5、PLC控制编程软件6、调试运行二、电动机主电路设计根据要求,主电路设计如图1。
初始时,机械手停靠在左边,SQ1为ON,当QF闭合时,按下启动开关SB1,则继电器KM1得电,电机正转,机械手向右运动至工位1,触发行程开关SQ2使之转为ON状态,则继电器KM3得电,电机停转,并在该位置停靠6秒,然后再继续前进至工位2,触发行程开关SQ3使之转为ON状态,同样继电器KM3得电,电机停转,并在该位置停靠6秒,然后电机反转,退回至初始位置。
主电路中H1,H2分别为左右极限报警灯,若机械手运动到极限左右位置时,触发极限位置开关,则KM3,KM4,KM5得电,电机停转,并且报警器得电报警。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科生毕业设计(论文)开题报告题目:Y802-4 0.75 kW三相鼠笼式异步电动机设计学院:系专业:班级:学号:姓名:指导教师:填表日期:2009年3月27日一、选题的依据及意义现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,作为动力设备的电机是不可缺少的一部分。
电机在国家经济建设,节约能源、环保和人民生中起着十分重要的作用。
发电机主要用于移动电源、风力发电、小型发电设备中;电动机在生产和交通运输中得到广泛使用,电动机主要用于驱动水泵、风机、机床、压缩机、冶金、石化、纺织、食品、造纸、建筑、矿山等机械产品上。
随着科学技术的不断创新和工农业的迅猛发展,电气化与自动化水平不断提高,国民经济各部门对异步电动机的需求量日益增加,对其性能,质量,技术经济指标也相应地提出了越来越高的要求。
因此,对异步电动机品种,必须适时实地做出更新与发展,以适应各个新兴工业领域不同的特殊要求,特别是对需求量最大的中小型异步电动机,在保证其质量运行,寿命长和能满足使用要求的同时,进一步节约铜、铁等材料,提高效率和功率因数,以提高其经济技术指标与降低耗电量,是具有十分重要的意义。
由于Y系列异步电动机具有体积小,重量轻,运行可靠,结构坚固耐用,外形美观等特点,具有较高的效率,有良好的节能效果,而且噪音低,寿命长,经久耐用。
作为普遍用于拖动各种机械的动力设备,其用电量在总的电网的总的负荷中占有重要的一席。
Y系列共有两个基本系列、十六个派生系列、九百多个规格,能满足国民经济各部门的不同需要。
所以设计研究三相异步电动机意义重大。
国内外研究现状及发展趋势(含文献综述)1、现状国外公司注重新产品开发,在电机的安全、噪声、电磁兼容等方面很重视。
国外的先进水平主要体现在电机的可靠性高,寿命长,通用化程度高,电机效率不断提高,噪声低,重量轻,电机外形美观,绝缘等级采用F级和H级,而且也考虑电机制造成本的降低等国内虽有部分产品已达90年代初的国际水平,但相当部分的产品可靠性差,重量重,体积大和噪声大,综合水平只相当于80年代初期国际水平,其主要原因是制造工艺落后,关键材料的质量和品种不能满足要求,科研和设计工作没有跟上,科研投入少,新产品开发资金匮乏,企业技术创新能力较弱2、电机行业发展趋势1)企业在改造中求发展企业要自己选准位置,立足生求,真抓实干,稳步发展。
我国中小电机生产销售受各种因素的影响,变化幅度比较大,企业要看准改革市场,并重点地去占领他,发挥企业自身的优势,例如,目前的稀土永磁电机,大量用于风机、水泵、机床、压缩机、城市交通及工矿电动车辆等变频调速装置,预测会有较大的发展前途。
2)发展派生、专用系列电机我们要开拓多用途、多品种派生和符合国外先进标准的电机产品。
随着社会的不断前进,科技水平的不断提高,电机行业的不断发展,市场需求会不断变化,电机产品的外延和内涵也不断拓展,电机产品配套面广,它广泛地应用于能源、交通、石油、化工、冶金、矿山、建筑等各个领域,并且电机的通用性逐步向专用性方面发展,打破了过去同一类电机同时用于不性质、不同场合的局面。
电机产品正向着专业性、特殊性、个性化方面发展,这也是国外企业发展的最新观点与动向。
3)电机要高效、节能我国中小型电机作为各种机械设备的动力源,其耗电总量已占全国发电量的70%左右。
因此,发展中国高效电机,推广节能产品,是响应国家节能政策、实现节能降耗的重要举措。
在产品开发中,以前的科学院所、企业在产品设计采用了许多办法,如采用降低起动力矩、电容补偿、阻尼槽方法来节约电能,但这些都是在频率不变的条件下来实现的。
自从有了逆变器后,电源的变频变压变的更加容易,从而可以调节异步电机在最佳工作点上运行,保证出力不变的情况下,可用最大效率和功率因数代替额定效率和额定功率因数,减小了电机尺寸,减轻了电机重量,降低了成本,提高了企业经济效益和社会效益。
4) 机电一体化、智能化随着科学技术的发展,机电一体化技术得到长足发展,同时,各种高新技术也为电机产品注入了新的活力,制造工艺和管理信息化技术通过微电子、计算机、网络技术的应用,国家政策的鼓励、各企业对科技的重视,使新产品开发的周期逐渐缩短,机电一体化、智能化电机(如交流变频调速电机是一种无级调速传动系统)应运而生,调速制造、虚拟制造等先进制造技术推广应用。
我国的电机的技术性能水平与发达国家的水平相当。
2、发展趋势随着国家宏观经济的调整以及市场需求的推动,二十世纪中小型电机的品种将得到更大的发展,尤其是对于发展高效率电机、高品位的出口电机和机电一体化的交流变频电机将会给予特别的重视,而一些新颖的电机,如永磁电机、无刷直流电机、开关磁阻电机等,将进一步完善。
同时,随着CAD技术、数控机床、专用加工设备、冷轧矽钢片、F级、H级绝缘材料等新技术、新材料的推广,电机行业的生产方式也将出现新的重大的变化。
电机的技术发展动向是向小型化、薄型化、轻量化、无刷化、智能化、静音化、高效化、节能化、环保化、可靠化、精密化、组合化,电机采用新型磁性、导电、绝缘材料。
六、参考文献[1] 陈世坤电机设计[M]机械工业出版社2000[2] 李发海电机学[M]科学出版社1995[3] 三相异步电动机设计、原理与试验沈阳机电学院[3] 张跃峰 AUTOCAD2004 入门与提高清华大学出版社目录摘要 (I)ABSTRACT (II)前言 (1)第1章概述 (2)1.1我国电机制造工业发展近况与发展趋势 (2)1.2电机的分类 (2)1.3三相异步电动机的结构和用途 (3)1.3.1异步电动机结构 (3)1.3.2异步电动机用途 (4)1.4三相异步电动机的基本工作原理和运行特性 (5)1.4.1 基本工作原理 (5)1.4.2三相异步电动机的工作特性 (5)1.5三相异步电动机的起动与调速 (6)1.5.1三相异步电动机的起动 (6)1.5.2三相异步电动机的调速 (7)1.6感应电动机的主要性能指标和额定参数 (8)1.7电机节能 (8)第2章三相鼠笼式异步电动机的设计方法 (10)2.1电磁负荷的选择与匹配 (10)2.1.1电磁负荷对电机性能和经济性的影响 (10)2.1.2 电磁负荷的选择 (10)2.1.3 电荷负荷的匹配 (11)2.2主要尺寸、气隙长度的选取及绕组型式的选择 (11)2.2.1主要尺寸的选择 (11)2.2.2 气隙长度的选取及确定 (12)2.2.3铁心尺寸 (12)2.2.4定子绕组形式和节距的选择 (13)2.3笼型转子的尺寸设计 (14)2.3.1 转子槽数选择及定转子槽配合问题 (14)2.3.2 转子槽形的选择和槽形尺寸的确定 (15)结束语......................................................................................... 错误!未定义书签。
致谢......................................................................................... 错误!未定义书签。
参考文献..................................................................................... 错误!未定义书签。
Y802-4 0.75 kW三相鼠笼式异步电动机设计摘要本文介绍了Y系列三相鼠笼异步电动机的设计方法,文章首先从异步电机的基本理论及工作特性着手,简单介绍了异步电机的发展近况、基本特性、类型、结构、用途、技术指标、工作原理及运行特性等,为电机设计的做好必要的理论准备。
电机设计是个复杂的过程,因此需要考虑的因素、确定的尺寸和数据很多。
同时本文也详细阐述了三相鼠笼异步电动机的设计改进调整方案,以及计算机辅助工具的应用,这给电机设计和优化带来了新的契机。
关键词 :三相异步电动机;设计;电磁路参数;工作性能;优化方案Y802-4 0.75KW Three-phase Squirrel-cageInduction Motor DesignAbstractIn this paper, Y series three-phase squirrel-cage induction motor design method, the article first of all, from the basic theory of induction motor characteristics and the work to proceed, briefly introduced the latest development of the induction motor, the basic characteristics, type, structure, purpose, technical indicators, the working principle and operation characteristics, designed for the motor to make the necessary preparations for the theory .Electrical design is a complex process and therefore need to take into consideration to determine a lot of size and data. At the same time, this article also detailed three-phase squirrel-cage induction motor to improve the design of adjustment programs, as well as the application of computer-aided tools, this motor design and optimization to bring a new opportunity.Keyword: Three-phase asynchronous motor; design; electromagnetic parameters; performance; optimization program前言现在社会中,电能是使用最广泛的一种能源,在电能的生产、输送和使用等方面,作为动力设备的电机是不可缺少的一部分。
中小型电机行业是机械工业的重要组成部分,在国民经济中起着举足轻重的作用。