最佳检测和最优估计的参数的包络孤子
卡尔曼滤波的最优估计原理
卡尔曼滤波的最优估计原理卡尔曼滤波是一种用于估计系统状态的最优估计方法,它基于贝叶斯滤波理论,通过融合传感器测量值和系统模型,以最小化估计误差的均方差为目标,实现对系统状态的最优估计。
卡尔曼滤波的最优估计原理可以用于多个领域,例如航天、导航、无人驾驶、自动控制等。
在这些领域中,准确地估计系统的状态是非常重要的,而卡尔曼滤波提供了一种有效的方法来实现这一目标。
卡尔曼滤波的核心思想是利用系统的动力学模型和测量模型来进行状态估计。
动力学模型描述了系统状态的演化规律,而测量模型描述了测量值与系统状态的关系。
通过不断地更新估计值,卡尔曼滤波可以提供对系统当前状态的最优估计。
卡尔曼滤波通过两个步骤来实现状态估计:预测步骤和更新步骤。
在预测步骤中,根据系统的动力学模型,预测系统的状态,并计算预测误差的协方差。
在更新步骤中,根据测量模型,将测量值与预测值进行比较,计算更新后的系统状态估计值和更新后的误差协方差。
卡尔曼滤波的最优估计原理在于它能够有效地融合动力学模型和测量模型,通过对估计误差的均方差进行最小化,提供对系统状态的最优估计。
这种方法不仅考虑了测量值的准确性,还考虑了系统模型的准确性,从而提高了状态估计的精度和鲁棒性。
卡尔曼滤波的最优估计原理在实际应用中具有广泛的意义。
例如,在无人驾驶领域,通过卡尔曼滤波可以实现对车辆的位置、速度和方向的准确估计,从而实现自动驾驶的精准控制。
在导航领域,卡尔曼滤波可以用于实时估计航天器的轨道和姿态,提高导航的精度和可靠性。
除了卡尔曼滤波,还有其他的最优估计方法,例如扩展卡尔曼滤波和无迹卡尔曼滤波等。
这些方法在卡尔曼滤波的基础上进行了改进,以适应更复杂的系统模型和测量模型。
卡尔曼滤波的最优估计原理提供了一种有效的方法来实现对系统状态的最优估计。
通过融合动力学模型和测量模型,卡尔曼滤波可以提供准确、鲁棒的状态估计,广泛应用于航天、导航、无人驾驶等领域。
这一原理的应用为各个领域的技术发展和应用提供了有力支持,促进了科技进步和社会发展。
光纤通信系统中的色散补偿问题综述

光纤通信系统中的色散赔偿问题综述1.Introduction光纤通信含有高速率、大容量、长距离以及抗干扰性强等特点。
但损耗和色散是长久妨碍光纤通信向前发展的重要因素。
随着着损耗问题的解决,色散成为决定光纤通信系统性能优劣的重要因素。
如何控制色散方便提高光纤通信系统的性能,成为光纤通信研究的热门课题之一。
现在对于光纤的色散已经提出了诸多赔偿办法,重要有色散赔偿光纤(DCF),啁啾光纤光栅,均匀光纤光栅,相位共轭(中点谱反转),全通滤波器、预啁啾等。
随着以上各办法缺点的暴露,学者们提出了光孤子色散赔偿技术,又相继提出了色散管理孤子,密集色散管理孤子等技术。
色散管理成为近年来光纤通信前沿研究的重要热点。
2.Concept of Dispersion由于信号在光纤中是由不同的波长成分和不同的模式成分来携带的,这些不同的波长成分和模式成分有不同的传输速率,从而引发色散。
也能够从波形在时间上展宽的角度去理解,也就是说光脉冲在通过光纤传输期间,其波形随时间发生展宽,这种现象称为光纤的色散。
3.Dispersion Causes普通把光纤中的色散分为三种类型:模式色散、模内色散和偏振色散。
a)模式色散模式色散是多模光纤才有的。
多模光纤中,即使是同一波长,模式不同传输速度也不同,它所引发的色散称为模式色散。
不同模式的光在光纤中传输时的传输常数不同,从而使传输同样长的距离后,不同模式的光波之间产生了群时延差,假设光纤能够传输多个模式,其中高次模达成输出端所需的时间较长,成果使入射到光纤的脉冲,由于不同模式达成的时间不同,或者说群时延不同,在输出端发生了脉冲展宽。
b)模内色散模内色散亦称颜色色散或多色色散。
重要是由于光源有一定带宽,信号在光纤中会有不同的波长成分,信号的不同波长分量含有不同的群速度,成果造成光脉冲的展宽。
模内色散涉及材料色散和波导色散。
c)偏振色散普通的轴对称单模光纤是违反“单模”名称的。
事实上有可能传输着两个模,即在光纤横截面上的两个正交方向(设为x 方向与y 方向)上偏振的(即在这些方向上含有场分量的)偏振模,同时由于实际的光纤中必然存在着某些轴不对称,那么,光纤会存在双折射,模传输常数β对于x,y 方向偏振模稍有不同,就会使这两个模式的传输速度不同,由此引发的色散叫偏振色散。
五种估计参数的方法

五种估计参数的方法在统计学和数据分析中,参数估计是一种用于估计总体的未知参数的方法。
参数估计的目标是通过样本数据来推断总体参数的值。
下面将介绍五种常用的参数估计方法。
一、点估计点估计是最常见的参数估计方法之一。
它通过使用样本数据计算出一个单一的数值作为总体参数的估计值。
点估计的核心思想是选择一个最佳的估计量,使得该估计量在某种准则下达到最优。
常见的点估计方法有最大似然估计和矩估计。
最大似然估计(Maximum Likelihood Estimation,简称MLE)是一种常用的点估计方法。
它的核心思想是选择使得样本观测值出现的概率最大的参数值作为估计值。
最大似然估计通常基于对总体分布的假设,通过最大化似然函数来寻找最优参数估计。
矩估计(Method of Moments,简称MoM)是另一种常用的点估计方法。
它的核心思想是使用样本矩和总体矩之间的差异来估计参数值。
矩估计首先计算样本矩,然后通过解方程组来求解参数的估计值。
二、区间估计点估计只给出了一个参数的估计值,而没有给出该估计值的不确定性范围。
为了更全面地描述参数的估计结果,我们需要使用区间估计。
区间估计是指在一定的置信水平下,给出一个区间范围,该范围内包含了真实参数值的可能取值。
常见的区间估计方法有置信区间和预测区间。
置信区间是对总体参数的一个区间估计,表示我们对该参数的估计值的置信程度。
置信区间的计算依赖于样本数据的统计量和分布假设。
一般来说,置信区间的宽度与样本大小和置信水平有关,较大的样本和较高的置信水平可以得到更准确的估计。
预测区间是对未来观测值的一个区间估计,表示我们对未来观测值的可能取值范围的估计。
预测区间的计算依赖于样本数据的统计量、分布假设和预测误差的方差。
与置信区间类似,预测区间的宽度也与样本大小和置信水平有关。
三、贝叶斯估计贝叶斯估计是一种基于贝叶斯理论的参数估计方法。
它将参数看作是一个随机变量,并给出参数的后验分布。
贝叶斯估计的核心思想是根据样本数据和先验知识来更新参数的分布,从而得到参数的后验分布。
最优检验 ppt课件
因 为 (x ) 1 时 ,表 示 拒 绝 原 假 设 ,所 以 称 (x )为 检 验 函 数 . (x )与 ()之 间 有 如 下 关 系 : () P ((x 1 ,x 2 ,Lx n ) W 1 ) E [(X 1 ,X 2 ,...X n )]
最优检验
势函数的意义在于当H0不真时,()反映了拒绝H0的功效的大小.因此,
[解] 由例1,给定显著性水平 =0.05,临界域(或称
拒绝域)为
X
W1 {( X1, X 2 ,...X n ) 0
对应势函数为
n 1.96}
X
( ) P ( 0 n 1.96)
P
(
X
0
n
1.96
0
n
)
P
(
X
0
n
n
n 1.96
)
0 n
最优检验
当H0为真时,即 0,则 (0) 1(1.96)(1.96) 0.05
最优检验问题.仅通过例子推广到备择假设是复合的情形.
检验假设 H0 : 0, H1: 1
(4)
则犯第一类错误的概率和犯第二类错误的概率分别为
P(拒绝H0 0) , P(接受H0 1)
最优检验
尽管对固定的样本容量n,不存在一个检验函数使和都 任意小. 但是能够存在这样一个检验函数,使和构成的线性 组合极小.针对极小化和的线性组合给出最优检验准则.设a 和b是确定的正数,如果存在一个检验函数(x1,x2,L xn),使a+ b极小,则称该检验为最优检验.对应的临界域称为最优临界域.
i1
i1
N(n0,n02),则 拒 绝 原 假 设 的 临 界 域 为
(-,n0 n0z(12))或 (n0 n 0z(12),)
信号检测与估计知识点总结(3)
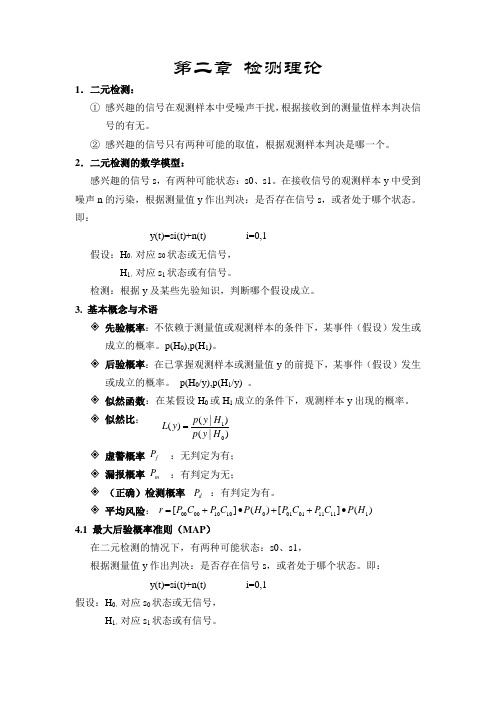
第二章 检测理论1.二元检测:① 感兴趣的信号在观测样本中受噪声干扰,根据接收到的测量值样本判决信号的有无。
② 感兴趣的信号只有两种可能的取值,根据观测样本判决是哪一个。
2.二元检测的数学模型:感兴趣的信号s ,有两种可能状态:s0、s1。
在接收信号的观测样本y 中受到噪声n 的污染,根据测量值y 作出判决:是否存在信号s ,或者处于哪个状态。
即:y(t)=si(t)+n(t) i=0,1假设:H 0:对应s 0状态或无信号,H 1:对应s 1状态或有信号。
检测:根据y 及某些先验知识,判断哪个假设成立。
3. 基本概念与术语✧ 先验概率:不依赖于测量值或观测样本的条件下,某事件(假设)发生或 成立的概率。
p(H 0),p(H 1)。
✧ 后验概率:在已掌握观测样本或测量值y 的前提下,某事件(假设)发生或成立的概率。
p(H 0/y),p(H 1/y) 。
✧ 似然函数:在某假设H 0或H 1成立的条件下,观测样本y 出现的概率。
✧ 似然比:✧ 虚警概率 :无判定为有;✧ 漏报概率 :有判定为无;✧ (正确)检测概率 :有判定为有。
✧ 平均风险: 4.1 最大后验概率准则(MAP )在二元检测的情况下,有两种可能状态:s0、s1,根据测量值y 作出判决:是否存在信号s ,或者处于哪个状态。
即: y(t)=si(t)+n(t) i=0,1假设:H 0:对应s 0状态或无信号,H 1:对应s 1状态或有信号。
)|()|()(01H y p H y p y L =f P m P d P )(][)(][111110101010100000H P C P C P H P C P C P r ∙++∙+=如果 成立,判定为H 0成立;否则 成立,判定为H 1成立。
利用贝叶斯定理: 可以得到: 如果 成立,判定为H 0成立; 如果 成立,判定为H 1成立;定义似然比为: 得到判决准则: 如果 成立,判定为H 0成立; 如果 成立,判定为H 1成立;这就是最大后验准则。
轴压弹性圆柱壳中的包络孤立子及其存在条件

O 引 言
非 线性波 动对 于解 决物 理学 和工程 技术 领域 的 复 杂现 象和 问题有 着及 其重 要 的意义 。孤立 子理论
的 建 立 是 非 线 性 波 动 理 论 发 展 中 一 项 重 大 成 就 。孤
ea t y i rc ls l i xa o r sin wa e ie i g cr umfr n il lg rt mi tan d f — lsi c l c nd i a hel n a i lc mp e so s d rv d usn ic e e ta o aih c sr i e ni i to in. Th e ucie p ru b to t o su e od rv o ln a q a in fo t e n n i a e u — er d tv e t r ain meh d wa s d t e i ea n n i e re u t r m h o l o ne rf x r l a v q ai n I f lo h tt e e it n e o h nv lp oio n t yi d ia h l i o sb e lwa e e u to . t o lws t a h x se c ft e e eo e s ltn i he c ln rc l s e l s p s i l u de et i o di o . T rg ta d d r o i n a e  ̄r d d p ndngo h i a e e to so n rc ra n c n t ns heb ih n a k s l o sc n b i t me e e i n t e st td s c in f u la p r mee nd wa e n m b rk i —k p a e. o d— a a t rA a v — u e n A ln
高斯马尔科夫定理名词解释
高斯马尔科夫定理名词解释高斯马尔科夫定理(Gauss-Markov Theorem)是统计学中的重要定理,在技术分析、金融建模等领域也有广泛应用。
它描述了一个系统的最优回归系数,它是基于一组具有特定性质的随机变量的最佳线性估计。
高斯马尔科夫定理是以19世纪德国数学家卡尔·高斯(Karl Gauss)和俄国数学家安德烈·马尔科夫(Andrey Markov)的名字命名的。
该定理提出,如果样本可以假设成独立同分布(iid),则最小二乘线性回归模型的回归系数——也就是最大似然估计——是唯一最优估计,即无偏和最小方差。
高斯马尔科夫定理的思想是,在一定条件下,最小二乘回归系数是最优的,也是唯一的估计。
假设有n个解释变量X1,X2,…,Xn和一个响应变量Y。
考虑一个线性回归模型Y=β0+β1X1+……+βnXn,其中β0,β1,…,βn是未知的回归系数。
在满足一定条件的情况下,使用最小二乘法寻找最优回归系数β0,β1,…,βn,可以使回归模型拟合度最好,而最小二乘法的估计结果也是唯一的。
高斯马尔科夫定理的条件有三个:1. 误差项应该是随机的,具有独立相同分布(iid)的正态分布;2. 没有自相关性,即误差项之间没有显著的关联;3. 无共线性,即解释变量之间不存在共线性。
这三个条件必须同时满足,否则高斯马尔科夫定理就不能应用。
高斯马尔科夫定理的应用非常广泛,它可以用来解决许多统计学问题,例如最小二乘回归分析、最小二乘分析、多项式回归分析和拟合、逐步回归分析、投资组合分析等。
此外,在技术分析、统计模型预测、风险管理和金融建模等领域也有广泛的应用。
总的来说,高斯马尔科夫定理是一个非常重要的定理,它提供了一种有效的方法来估计未知参数,根据条件来求解最优回归系数,广泛应用于技术分析、金融建模等领域。
浙江大学数学系计算机辅助几何设计与图形学科研组(CAG...
前言浙江大学数学系计算机辅助几何设计与图形学科研组(CAGD&CG Group)开展计算机图形学和几何设计的研究已有二十余年历史.近十年来,科研组在国家自然科学基金资助和兄弟单位帮助下,针对计算机辅助曲线曲面造型的国际前沿课题和我国工业界提出的专业技术难点开展攻关研究,取得了一批理论成果.这些成果先后总结成论文,发表在Computer Aided Geometric Design, CVGIP: Graphical Models and Image Processing, Computer Aided Design, Computing, Computer Graphics, Computers and Graphics, Computers in Industry, Journal of Approximation Theory, Chinese Science Bulletin, Progress in Natural Science, Journal of Computer Science and Technology, Journal of Computational Mathematics, Computer AidedDrafting, Design and Manufacturing等国际期刊和《中国科学》、《计算机学报》、《软件学报》、《数学年刊》、《应用数学学报》、《计算数学》、《高校应用数学学报》、《计算机辅助设计与图形学学报》等国内核心刊物上,累计逾百篇.其中有30篇被SCI(Science Citation Index)摘录,有34篇被EI(Engineering Index)摘录,有2篇在SIGGRAPH计算机图形与交互技术国际会议上宣读,又被作为第一作者的国际学者100多人次在70多篇文章中引用150多次,在CAGD&CG这一高技术领域为我国争得了一席之地.为了与广大读者共享我们的科研成果,为祖国的四化尽绵薄之力;为了与同行们进行学术交流,起到抛砖引玉的作用,我们在国家自然科学基金研究成果专著出版基金的资助下,把这些论文进行系统的归纳整理,写成本书印刷出版.2前言计算机辅助几何设计(Computer Aided Geometric Design)主要研究在计算机图象系统的环境下对曲面信息的表示、逼近、分析和综合.它肇源于飞机、船舶的外形放样(Lofting)工艺,由Coons(1912 - 1979)、Bézier(1910 - 1999)等大师于20世纪60年代奠定理论基础.典型的曲面表示,20世纪60年代是Coons技术和Bézier技术,20世纪70年代是B样条技术,20世纪80年代是有理B样条技术.现在,曲面表示和造型已经形成了以非均匀有理B样条(NURBS:Non-Uniform Rational B-Spline)参数化特征设计(Parameterized and Characteristic Design)和隐式代数曲面表示(Implicit Algebraic Surface Representation)这两类方法为主体,以插值(Interpolation)、拟合(Fitting)、逼近(Approximation)这三种手段为骨架的几何理论体系.随着计算机图形显示对于真实性、实时性和交互性要求的日益增强,随着几何设计对象向着多样性、特殊性和拓扑结构复杂性靠拢这种趋势的日益明显,随着图形工业和制造工业迈向一体化、信息化和网络化步伐的日益加快,随着激光测距扫描等三维数据采样技术和硬件设备的日益完善,计算机辅助几何设计在近几年来得到了长足的发展.这主要表现在研究领域的急剧扩展和表示方法的开拓创新.从研究领域来看,计算机辅助几何设计技术已从传统的研究曲面表示、曲面求交和曲面拼接,扩充到曲面变形、曲面重建、曲面简化、曲面转换和曲面位差;从表示方法来看,以网格细分(Subdivision)为特征的离散造型与传统的连续造型相比,大有后来居上的创新之势.而且,这种曲面造型方法在生动逼真的特征动画和雕塑曲面的设计加工中如鱼得水,前言 3 得到了高度的运用.在这本书中,大部分章节反映了当前的国际研究热点,如有理参数曲面的多项式逼近,降阶逼近和隐式逼近,网格曲面的细分逼近,曲面互化和变形,曲面重建和简化,曲面拼接和求交,曲面位差计算和曲面区间分析等.因此本书的第一个特点是题材新颖、接触前沿.在这本书中,展示的最新理论成果涵盖了曲线曲面的计算机表示、插值、拟合、逼近、拼接、离散、转换、求交、求导、求积、变形、区间分析和等距变换等方面,这些都是计算机辅助几何设计的重要研究领域.因此本书的第二个特点是内容丰富、涉猎广泛.在这本书中,重点介绍了浙江大学数学系CAGD&CG Group近十年来独立创造的计算机辅助几何设计的许多新技术和新方法,例如Bézier/B-Spline/NURBS曲线的包络生成技术,离散B样条计算技术,有理圆锥曲线段Bernstein基表示技术,广义Ball曲线曲面表示和求值技术,复杂B样条曲线曲面节点插值技术,有理曲面任意阶几何连续拼接技术,参数曲线曲面求交中离散层数的先验性技术和离散最佳终判技术,有理Bézier曲线曲面的求导求积技术,曲线曲面等距性中的复分析、重新参数化和代数几何技术,曲面变形中的活动球面坐标技术等等.因此本书的第三个特点是自成体系、浙大特色.在这本书中,各章内容充分体现了计算机辅助几何设计这一新兴边缘学科与应用逼近论、微分几何、代数几何、线性代数、数值分析、拓扑学、微分方程、分形小波等近代数学各个分支以及计算机图形学、几何造型、数据结构、程序语言、机械加工、外形检测、4前言三维医学图象学、人体解剖学等学科的交叉和渗透;同时,部分内容是我们在完成国内前西安飞机公司、成都飞机公司、上海船舶运输科学研究所、杭州妇幼保健医院、前浙江医科大学解剖学教研室等单位的实际课题中所总结写成的;即使是理论推导的内容,我们在写作中也尽量描述其来龙去脉和应用背景,希望对我国的工业产品造型、机械设计制造、动画制作、计算机图形软件编制会有一定的帮助;全书总结的曲线曲面的所有算法都被编制了程序,在SGI图形工作站和微机上反复调试,得到实现.因此,本书的第四个特点是学科交叉、面向应用.最后,这本书的写作采取了由叙述基本概念出发,从几何直观的角度步步深入展开的做法;推导严谨,重点突出,对原发表论文中的定理和算法以再创作的态度作了改写和简缩,以全书统一的符号加以描述,并尽量阐明其创新思路、几何意义及应用步骤.全书集中介绍我们的理论成果,为保持内容的系统性和完整性,对国际国内的重要相关理论也作扼要介绍.至于基本概念的叙述,又尽可能不落俗套,尽量采用我们自己的新观点和新思想.例如,Bézier曲线的引入,采用了空间割角多边形序列一致收敛的极限形式并给予严格证明;B样条基函数,采用了新推导的一般递推公式;NURBS曲线的引入,采用了递归的包络定义;细分曲面的引入,采用了我们提倡的切割磨光法;区间曲面的引入,采用了我们给出的中心表达形式等等.这样做的好处一是再次体现专著特色,二是使读者不必多找其他参考书籍,只要具备数学分析(微积分)、线性代数和应用微分几何知识就能读懂全书,登堂入室.因此,本书的第五个特点是论述简明、深入浅出.前言 5 正因为本书是按照由浅入深、循序渐进、严格定义、严密推理、算法详细、注重应用的原则写成的,所以它虽然是一本专著,但却可兼而用作大学的研究生教材,其中第1、2、3、7章的全部以及第5、6、9、10章的前几节也可用作大学高年级学生的选修课教材,更适合于有志从事计算机图形和计算机辅助设计研究者作为自学入门的向导.本书可供高等院校计算机科学与工程系、应用数学系、机械工程系、航空航天、舰船、汽车、模具、机器人制造、建筑、测绘、勘探、气象、公路设计、服装鞋帽设计、工业造型、工艺美术、电子通讯、生物、医学图象处理等专业的广大师生和研究生阅读;对从事曲面造型理论研究与工程应用和从事科学计算可视化的广大科技人员,对从事计算机图形、影视动画软件开发和从事产品外形设计、制造与工艺(CAD/CAM/CAPP)方面有关软件开发的计算机工作者也有较大参考价值.本书作者从1984年起为浙江大学应用数学系(1999年起更名为数学系)、计算机系、机械系以及后来建立的浙江大学CAD&CG国家重点实验室的研究生开设学位课程《计算几何》.十多年来,遵照教材现代化、教材与国际接轨的要求,把CAGD领域的国际研究进展和本课题组的最新研究成果一点一滴地及时充实到课程讲义之中,不断更新教学内容,以科研带教学,以教学促科研,受到了听讲学生的普遍欢迎.正是这多年的教学经验积累和科学研究收获,为本书的写作奠定了坚实的基础.本书共有二十章.首先由王国瑾教授拟定各章内容和细目,与其余作者进行了充分的6前言讨论和修改.汪国昭教授撰写了第11章、第20章和第1章的前四节;郑建民教授撰写了第10章、第18章和第16章的第1、2、3、7、8、9节;杨勋年副教授撰写了第6章的前二节;王国瑾教授撰写了本书其余的十三章以及第1章的后二节、第6章的后三节和第16章的第4、5、6、10节;最后由王国瑾教授负责全书的统稿、润色和校订.这本书是在前浙江大学应用数学系主任和浙江大学CAD&CG国家重点实验室学术委员会前主任梁友栋教授的关心和支持下写成的,浙江大学数学系的董光昌教授和金通洸教授也对本书的写作给予热情的鼓励.作者衷心感谢兄弟院校的师长们,他们多年来都在学术上给作者以丰富的启迪,在工作中给作者以巨大的帮助;尤其是亲自倡导并身体力行开展中国CAGD研究事业的著名数学家苏步青院士,他对科学的执著和创造精神,他以七十多高龄下厂解决实际课题的研究作风,一直激励着作者们奋发进取.博士生刘利刚、陈国栋、陈动人、钟纲、吕勇刚、张宏鑫、满家巨、寿华好、车武军、吕晟珉、张景峤以及硕士生解本怀、金雷为本书文稿的打字和排版付出了辛勤的劳动,作者也向他们表示诚挚的感谢.在本书面世之际,三位作者还要对养育自己的父母以及各自的妻子吴定安、林亚平、任开文表示深深的敬意.他们以自己的爱心和操劳,默默地支持着作者们长年累月的科研工作和本书的写作.如果说,本书对我国的科学研究、工业和软件业会有一点微薄贡献的话,那么这里面也有他们的一份功劳.前言7 由于时间仓促,加之水平有限,本书中难免会有错误和不足,敬请读者不吝指正.作者谨识于浙江大学求是园欧阳纯美楼目录第一章Bézier曲线 (1)1.1自由曲线造型概论 (1)1.1.1样条函数插值的Hermite基表示 (1)1.1.2端点条件及追赶法 (2)1.1.3样条曲线 (3)1.2割角多边形序列的生成及收敛(Bézier曲线的几何生成法I) (4)1.2.1简单割角法 (4)1.2.2割角多边形序列的两个性质 (4)1.2.3割角多边形序列的极限形式 (6)1.3Bézier曲线的基本几何性质及几何生成法II和III (7)1.4Bézier曲线的离散构造与平面Bézier曲线的保凸性质 (10)1.4.1离散公式的导出 (10)1.4.2离散公式的应用(平面Bézier曲线的保凸性) (12)1.5Bézier曲线的包络性质(几何生成法IV) (12)目录91.6Bézier曲线的代数性质 (13)1.6.1Bézier曲线两种代数定义的等价性 (13)1.6.2Bézier曲线的幂基表示 (14)1.6.3Hermite插值曲线的Bézier表示 (15)主要文献 (16)参考文献 (16)第二章B样条曲线 (18)2.1B样条基函数的递推定义及其性质 (18)2.2B样条曲线的包络生成及几何定义 (20)2.3B样条曲线的基本几何性质及连续阶 (21)2.4B样条曲线求值和求导的de Boor算法 (23)2.5三次均匀B样条曲线的几何作图及设计技巧 (24)2.6带重节点的三次B样条曲线的基本性质 (25)2.7广义差商及B样条基函数的差商定义 (27)2.8嵌入一个节点改变B样条基函数和B样条曲线表示 (28)2.9连续嵌入同一个节点达k 1重时的B样条曲线 (30)2.10离散B样条及离散B样条曲线 (31)10目录2.11平面B样条曲线的保凸性和变差缩减性(V.D.)性 (32)主要文献 (33)参考文献 (33)第三章有理Bézier曲线 (35)3.1圆锥曲线的经典数学表示及其有理二次参数化 (35)3.2有理Bézier曲线的定义及其基本几何性质 (36)3.3有理Bézier曲线的离散构造及包络性 (39)3.4平面有理Bézier曲线的隐式化 (40)3.4.1隐式方程的导出 (40)3.4.2平面n次代数曲线有理参数化的条件 (41)3.5有理二次Bézier曲线的分类 (42)主要文献 (43)参考文献 (43)第四章有理B样条曲线 (44)4.1NURBS曲线的一般定义、递推求值及离散构造 (44)4.2平面NURBS曲线的保形性 (46)4.3NURBS曲线的包络生成及几何定义 (47)4.3.1包络的存在性 (47)4.3.2包络的唯一性 (48)4.3.3NURBS曲线的几何定义 (50)4.4NURBS曲线的显式矩阵表示 (51)4.4.1基于差商的系数矩阵显式表示 (51)4.4.2基于Marsden恒等式的系数矩阵显式表示 (53)4.4.3特殊NURBS曲线的系数矩阵显式表示 (54)主要文献 (55)参考文献 (56)第五章有理圆弧段与有理圆锥曲线段 (57)5.1圆弧曲线段的有理二次Bézier表示 (57)5.2圆弧曲线段的有理三次Bézier表示 (58)5.2.1充分条件和充要条件的导出 (58)5.2.2圆心角范围与顶点的几何作图 (59)5.3圆弧曲线段的有理四次Bézier表示 (60)5.3.1充要条件的导出 (60)5.3.2圆心角范围 (62)5.4圆锥曲线段的有理三次Bézier表示 (63)5.4.1有理三次Bézier曲线的降阶条件与有理保形参数变换下的不变量 (63)5.4.2有理三次圆锥曲线段向单位圆弧的转换 (64)5.4.3有理三次圆锥曲线段的充要条件 (65)5.4.4有理三次圆锥曲线段的分类条件 (67)5.5圆弧曲线段与整圆的有理B样条表示 (68)主要文献 (68)参考文献 (69)第六章几何样条插值、逼近及平面点列光顺 (70)6.1平面点列的双圆弧样条插值 (71)6.1.1最优切矢的确定 (71)6.1.2双圆弧插值的算法 (72)6.2平面点列光顺算法 (72)6.2.1多余拐点的去除 (73)6.2.2基于改进最小能量法的离散曲率光顺方法 (74)6.3平面曲线的圆弧样条逼近和空间曲线的圆柱螺线样条逼近 (76)6.3.1平面曲线的圆弧样条逼近 (76)6.3.2空间曲线的圆柱螺线样条逼近 (76)6.4空间型值点位矢和单位切矢的双圆柱螺线插值 (78)6.5由散乱型值点构造插值曲面 (78)主要文献 (80)参考文献 (80)第七章矩形域和三角域上的参数函数曲面 (82)7.1插值算子布尔和与张量积 (82)7.2矩形域上的Bézier曲面及其几何性质 (84)7.3三角域上的Bézier曲面及其几何性质 (86)7.3.1三角域上的Bézier参数曲面及其基本性质 (86)7.3.2三角域上Bézier函数曲面的正性和凸性 (90)7.4矩形域上的B样条曲面、有理Bézier曲面与有理B样条曲面 (94)7.5旋转曲面的有理Bézier表示 (95)7.5.1有理双二次Bézier表示 (95)7.5.2有理双三次Bézier表示 (96)7.6球面的有理参数表示 (97)主要文献 (97)参考文献 (98)第八章广义Ball曲线与广义Ball曲面 (99)8.1CONSURF系统中机身造型曲线的几何性质 (100)8.2两种广义Ball曲线 (102)8.3Wang-Ball基函数的性质 (102)8.4Said-Ball、Wang-Ball曲线与Bézier曲线的比较 (103)8.4.1递归求值 (103)8.4.2与Bézier曲线的互化 (105)8.4.3升阶和降阶 (107)8.5利用广义Ball曲线曲面对Bézier曲线曲面求值 (109)8.6三角Ball曲面 (110)8.6.1三角Wang-Ball基及三角Wang-Ball曲面 (110)8.6.2三角Wang-Ball曲面的升阶和递归求值 (111)主要文献 (112)参考文献 (112)第九章曲线曲面的插值与拟合 (113)9.1B样条曲线曲面的节点插值法 (113)9.2C2连续的三次B样条插值曲线 (114)9.3C1和C0连续的三次B样条插值曲线 (116)9.3.1选取二重节点和三重节点的准则 (116)9.3.2以重节点为界对插值曲线分段反求控制顶点的原理和算法 (117)9.4参数无重节点的双三次B样条插值曲面 (118)9.5参数有重节点的双三次B样条插值曲面 (120)9.6C2, C1和C0连续的三次Bézier样条插值曲线 (120)9.7C2, C1和C0连续的双三次Bézier样条插值曲面 (122)9.8构造插值样条曲面时型值点不一致分布的均匀性检查 (124)9.9带插值条件的B样条曲线光顺拟合 (124)9.10带插值条件的B样条曲面光顺拟合 (125)9.11带插值条件且与已知曲面作C1连续拼接的Bézier曲面光顺拟合 (126)主要文献 (128)参考文献 (128)第十章曲线曲面的几何连续性 (129)10.1几何连续性概念的提出 (129)10.2曲线的几何连续性 (131)10.2.1曲线几何连续性的定义 (131)10.2.2曲线的有理连续性 (134)10.2.3有理连续性条件 (136)10.3几何光滑拼接曲线的构造 (138)10.4曲面的曲率连续 (140)10.4.1曲率连续的一般条件 (140)10.4.2矩形域上有理Bézier曲面的G2条件 (142)10.4.3曲率连续拼接的有理Bézier曲面的构造 (144)10.4.4简单曲率连续拼接曲面的构造 (147)10.5曲面的任意阶几何连续 (147)10.5.1曲面G n连续的定义 (147)10.5.2有理几何连续的一般条件 (149)10.5.3有理几何连续条件的求解 (149)10.5.4有理几何连续的简单形式 (153)10.6矩形域上有理Bézier曲面的G n拼接 (154)10.6.1有理Bézier曲面几何连续拼接的判定 (154)10.6.2有理Bézier曲面几何连续拼接的构造 (155)10.7三角域和矩形域上有理Bézier曲面的拼接 (156)主要文献 (157)参考文献 (157)第十一章参数曲线曲面的求交技术 (159)11.1B样条曲线转化为Bézier曲线 (160)11.2B样条曲面转化为Bézier曲面 (161)11.3Bézier曲线曲面的高度分析 (162)11.4Bézier曲线曲面离散层数的先验性公式 (166)11.5对Riesenfeld关于曲线离散终判准则的改进 (167)11.5.1三次Bézier曲线的化直准则 (168)11.5.2n次有理Bézier曲线的化直准则 (168)11.5.3一个极值问题 (169)11.6Bézier曲线和B样条曲线的离散求交法 (170)11.7Bézier曲面和B样条曲面的离散求交法 (171)11.8Bézier曲面与平面的求交 (172)11.9有理Bézier曲线曲面离散终判的先验性公式 (172)11.10离散差分跟踪求交法 (175)11.10.1 多项式曲面的差分表示 (175)11.10.2 Bézier 曲面的差分矩阵和差分表示 (176)11.10.3 Bézier 曲面求交中跟踪子曲面片的选定 (177)11.10.4 离散差分跟踪求交 (178)11.11 曲面求交的活动仿射标架跟踪法 (179)11.11.1 球变换 (179)11.11.2 求交算法 (180)11.12 Bézier 曲面的环检测 ............................................................................................ 180 主要文献 .......................................................................................................................... 181 参考文献 .......................................................................................................................... 182 第十二章 有理Bézier 曲线曲面的多项式逼近 (183)12.1 有理Bézier 曲线的两类多项式逼近〉〈p r ,h 和〉〈p r ,H (184)12.1.1 有理曲线Hermite 逼近与Hybrid 逼近的定义 (184)12.1.2 用传统的逼近论方法求〉〈s s ,h 的收敛条件 (185)12.1.3 〉〈p r ,h 逼近与〉〈p r ,H 逼近的关系 (186)12.2 〉〈p r ,h 逼近与〉〈p r ,H 逼近的余项 ....................................................................... 188 12.3 h 逼近曲线)(,t p r h 与Hybrid 曲线)(,t p r H ............................................................ 189 12.4 〉〈s s ,h 逼近与〉〈s s ,H 逼近的收敛条件 .. (192)12.5 低次〉〈s s ,h 逼近与〉〈s s ,H 逼近的收敛准则 (193)12.5.1 一次有理曲线多项式逼近收敛的充要条件 (193)12.5.2 关于多项式根的几个引理 (193)12.5.3 二次有理曲线多项式逼近的收敛准则 (194)12.5.4 三次有理曲线多项式逼近的收敛准则 (195)12.5.5 重新参数化技术对收敛条件的影响 (195)12.6 〉〈0,s h 逼近与〉〈0,s H 逼近的收敛条件.................................................................. 196 12.7 )/(p r 有定极限值的〉〈p r ,h 逼近与〉〈p r ,H 逼近的收敛条件 ............................ 196 12.8 Hybrid 曲线的移动控制顶点)(,t p r r H 的界 (196)12.8.1 对具有对称权因子的低次有理曲线求)(,t s s s H 的界 (197)12.8.2 利用矩阵方法对一般有理曲线求)(,t s s s H 的界 (198)12.8.3 利用复平面上的围道积分求p r r p r r t ,,)(H H -的界 (200)12.9 一般情况下〉〈p r ,h 逼近和〉〈p r ,H 逼近收敛的充要条件 ................................... 202 12.10 用新的观点研究有理Bézier 曲线的〉〈p r ,H 逼近 ............................................. 205 12.11 有理Bézier 曲面的Hybrid 表示 .......................................................................... 208 12.12 有理Bézier 曲面的两类多项式逼近〉〈q s p r ,;,H 和〉〈q s p r ,;,h (212)12.12.1 有理曲面Hybrid 逼近与Hermite 逼近的定义 (212)12.12.2 〉〈q s p r ,;,H 逼近的余项 (213)12.12.3 〉〈q s p r ,;,h 逼近与〉〈q s p r ,;,H 逼近的关系 (213)12.13 Hybrid 曲面),(,;,v u q s p r H 的递推计算公式 (216)12.13.1 一般情况 (216)12.13.2 简化情况 (219)12.14 有理Bézier 曲面〉〈q s p r ,;,H 逼近的收敛条件 (221)12.14.1 〉〈q s p r ,;,H 逼近余项的界 (221)12.14.2 〉〈s s s s ,;,H 逼近收敛的一个充分条件 (222)12.14.3 〉〈q s p r ,;,H 逼近收敛的充要条件 (222)主要文献 .......................................................................................................................... 223 参考文献 .. (223)第十三章 有理Bézier 曲线曲面的求导和求积 (224)13.1 有理Bézier 倍式化速端曲线 (224)13.1.1 Dir 函数的定义和性质 (224)13.1.2 倍式化速端曲线的导出 (225)13.1.3 曲线导矢方向的界 (226)13.1.4 曲线导矢大小的界 (226)13.2 有理Bézier 倍式化速端曲面 (227)13.2.1 倍式化速端曲面的导出 (227)13.2.2 曲面导矢方向的界 (228)13.2.3曲面导矢大小的界 (229)13.3动曲线轨迹的速端曲线 (230)13.3.1速端曲面的直接导出 (230)13.3.2曲面导矢界的估计 (231)13.4有理Bézier曲面的法矢 (232)13.4.1Nrm函数的定义和性质 (232)13.4.2曲面法矢的计算 (232)13.4.3曲面法矢方向的界 (233)13.5有理Bézier曲线的高阶导矢 (234)13.5.1高阶导矢的递推算法 (234)E表示的应用I:有理Bézier曲线的弧长估计 (236)13.5.2导矢1-niE表示的应用II:有理Bézier曲线端点处的三阶导矢的计算 (236)13.5.3导矢1-niE表示的应用III:有理Bézier曲线的导矢界的估计 (237)13.5.4导矢1-ni13.6二次有理Bézier曲线的精确求积 (238)13.6.1求积问题的提法与积分模型的简化 (238)13.6.2精确求积公式的导出 (239)13.7平面有理Bézier曲线求积的多项式逼近 (241)13.7.1平面Bézier曲线求积 (241)13.7.2平面有理Bézier曲线求积的多项式逼近的误差界及其算法 (242)13.8平面有理Bézier曲线求积的降阶逼近 (244)13.8.1降阶求积的误差估计 (244)13.8.2降阶求积的算法 (247)13.9二次和三次NURBS曲线求积 (247)主要文献 (247)参考文献 (247)第十四章Bézier曲线曲面的降阶逼近 (249)14.1Bézier曲线、Bézier矩形片与Bézier三角片的退化条件 (250)14.2Bézier曲线降阶的B网扰动和约束优化法 (251)14.2.1降阶的显式算法和误差估计 (251)14.2.2离散/降阶算法 (253)14.2.3降阶中的G1连续条件 (253)14.3Bézier矩形片与Bézier三角片降阶的B网扰动和约束优化法 (254)14.3.1Bézier矩形片的降阶 (254)14.3.2Bézier三角片的降阶 (255)14.4基于广义逆矩阵的Bézier曲线一次性降多阶逼近 (257)14.4.1端点不保插值的降多阶逼近 (257)14.4.2保端点插值的降多阶逼近 (258)14.4.3误差分析及实例 (258)14.5保端点高阶插值的Bézier曲线一次性降多阶逼近 (259)主要文献 (263)参考文献 (263)第十五章曲线曲面形式之间的互化 (264)15.1二次NURBS曲线与二次有理Bézier曲线之间的互化 (265)15.2双二次NURBS曲面与双二次有理Bézier曲面之间的互化 (266)15.3三次NURBS曲线与三次有理Bézier曲线之间的互化 (267)15.4Bézier三角片到退化矩形片的转化 (270)15.5Bézier三角片到三张非退化矩形片的转化 (272)15.6Bézier矩形片用线性函数实现广义离散及其到三角片的转化 (274)15.6.1矩形参数域被分割为两块梯形域的广义离散算法 (274)15.6.2矩形参数域被分割为三边区域和五边区域的广义离散算法 (275)15.6.3Bézier矩形片到两张三角片的转化 (276)15.7Bézier矩形片用高次代数曲线实现广义离散并用于曲面拼接 (277)15.7.1矩形参数域被分割为两块曲边梯形域的广义离散算法 (277)15.7.2矩形参数域被分割为三边和五边曲边区域的广义离散算法 (278)15.7.3广义离散在几何连续拼接和trimmed曲面参数表示中的应用 (279)15.8基于de Casteljau算法的有理二次Bézier曲线隐式化 (279)15.9基于de Casteljau算法的平面有理n次Bézier曲线隐式化 (281)主要文献 (285)参考文献 (285)第十六章等距曲线与等距曲面 (287)16.1平面等距曲线 (289)16.2Pythagorean-hodograph(PH)曲线 (291)16.2.1定义和表示 (291)16.2.2三次PH曲线的构造、特征和性质 (292)16.2.3四次和五次PH曲线的构造 (293)16.2.4PH曲线的等距曲线和弧长 (295)16.3具有有理等距曲线的参数曲线(OR曲线) (295)16.3.1参数曲线的复形式表示 (295)16.3.2参数曲线具有有理等距曲线的充要条件 (297)16.3.3具有有理等距曲线的低次Bézier曲线 (299)16.4PH曲线和OR曲线的插值构造算法 (300)16.4.1平面五次PH曲线的G2 Hermite插值 (300)16.4.2平面三次PH曲线偶的C1 Hermite插值 (300)16.4.3平面八次抛物 PH曲线的C2 Hermite插值 (301)16.5基于法矢曲线逼近的等距曲线最佳逼近 (302)16.5.1法矢曲线最佳多项式逼近的导出 (302)16.5.2具有端点约束的法矢曲线最佳逼近 (303)16.5.3Legendre级数与Jacobi级数的系数计算 (304)16.5.4NURBS曲线的等距曲线逼近 (305)16.6基于刘徽割圆术的等距曲线逼近算法 (306)16.7具有有理中心线的管道曲面 (309)16.8二次曲面的等距曲面 (310)16.8.1椭圆抛物面和双曲抛物面的等距曲面 (311)16.8.2椭球面的等距曲面 (311)16.8.3单叶双曲面的等距曲面 (312)16.8.4双叶双曲面的等距曲面 (313)16.9有理直纹面的等距曲面 (313)16.10基于球面三角网格逼近的等距曲面逼近算法 (315)主要文献 (315)参考文献 (316)第十七章区间曲线与区间曲面 (319)17.1区间Bézier曲线的边界 (320)17.1.1区间算术和区间点算术 (320)17.1.2区间Bézier曲线及其中心表达形式 (320)17.1.3平面区间Bézier曲线的边界 (321)17.1.4空间区间Bézier曲线的边界 (326)17.2区间Bézier曲线与Offset曲线之间的关系 (330)17.3区间Bézier曲面及其中心表达形式和边界结构 (331)17.4区间Bézier曲面与Offset曲面之间的关系 (333)17.5区间Bézier曲面逼近 (334)17.5.1利用区间Bézier曲面对可微参数曲面作Taylor逼近 (334)17.5.2利用区间Bézier曲面对有理曲面作多项式逼近 (335)主要文献 (336)参考文献 (336)第十八章基于切割磨光的曲线曲面离散造型 (338)18.1切割磨光空间多边形的迭代算法 (339)18.2切割磨光曲线的性质 (341)18.2.1逼近性 (341)18.2.2连续性 (342)18.2.3光滑性 (344)18.2.4几何性质 (346)18.3切割磨光曲面造型的原理和算法 (347)18.4切割磨光曲面造型的技巧和性质 (351)18.4.1切割磨光的技巧 (351)18.4.2切割磨光曲面的收敛性 (352)18.4.3切割磨光曲面的光滑性 (355)18.5任意拓扑网格的切割磨光法 (358)18.5.1原理和方法 (358)18.5.2切割磨光曲面的光滑性 (359)18.6Catmull-Clark曲面和Doo-Sabin曲面 (362)18.6.1Catmull-Clark曲面的生成 (362)18.6.2Catmull-Clark曲面的连续性分析 (364)18.6.3Doo-Sabin曲面的生成 (366)18.7非均匀Doo-Sabin曲面和非均匀Catmull-Clark曲面 (367)18.7.1非均匀Doo-Sabin曲面和非均匀Catmull-Clark曲面的生成 (367)18.7.2非均匀Doo-Sabin曲面的特征根分析 (371)18.8 蜂窝细分 (375)主要文献 (376)参考文献 (377)第十九章曲面的形状调配和变形 (379)19.1简单曲面变形的顶点对应算法 (380)19.2平面多边形的内在量及其调配算法 (380)19.3空间多边形的内在量及其调配算法MSI (381)19.3.1内在变量集的定义及其与空间多边形的关系 (381)19.3.2空间多边形调配的内在解 (382)19.4空间四边形网格的形状调配算法 (384)19.5空间三角网格的形状调配算法 (385)19.5.1空间n次Bézier三角网格的情形 (385)19.5.2一般空间三角网格的情形 (386)19.6自由曲线曲面的调配算法 (387)。
人工智能自然语言技术练习(习题卷19)
人工智能自然语言技术练习(习题卷19)第1部分:单项选择题,共43题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]关于k-NN中的k,根据偏差,以下哪一项是正确的A)当你增加k时,偏差会增加B)当你减少k时,偏差会增加C)不能判断D)以上都不对答案:A解析:2.[单选题]GBDT和随机森林都属于集成学习,因此他们有相似的地方,下列描述正确的是A)组成随机森林的树可以并行生成,而GBDT是串行生成B)随机森林的结果是多数表决表决的,而GBDT则是多棵树累加之和C)都是由多棵树组成,最终的结果都是由多棵树一起决定。
D)随机森林对异常值不敏感,而GBDT对异常值比较敏感答案:C解析:3.[单选题]如果数据特征太多,需要对数据特征做降维操作,可以使用以下那种方式A)PCA降维B)K-MeansC)SVMD)岭回归答案:A解析:4.[单选题]汉语自动分词的准确率具体定义是()A)P=(系统输出正确词个数/系统输出词个数)*100%B)R=(系统输出正确词个数/标准答案中词的个数)*100%C)F=((β2+1)*P*R)/(β2*P+R)=(B=1)(2*P*R)/(P+R)D)P(A|B)=P(B|A)*P(A)/P(B)答案:A解析:5.[单选题]XGBoost中用到了和哪个树相同的想法,去寻找最优A)随机森林B)CART回归树C)ID3D)C4.5答案:B解析:6.[单选题]层次softmax使用什么结构编码A)拉格朗日乘子方式B)霍夫曼树的结构C)负例采样D)不确定答案:B解析:7.[单选题]属于一对多输出的序列网络有:A)音乐生成B)情感分类C)机器翻译D)DNA序列分析答案:A解析:8.[单选题]以下四个选项中,哪个激活函数的的输出在0~1的范围之间A)reluB)tanhC)Leaky ReluD)sigmoid答案:D解析:9.[单选题]美国Brown大学于20世纪60~70年代开发的通用语料库是A)LOB语料库B)PropBankC)Brown语料库D)Penn TreeBank答案:C解析:10.[单选题]sigmoid函数的缺点:导数值范围为(0,0.25],反向传播时会导致“梯度消失”。
包络定理

五、值函数1. 间接目标函数⑴ 间接目标函数的一般概念将(带参数的)最优化模型的解代入目标函数(无约束时)或拉格朗日函数(有等式约束时)即得到间接目标函数(值函数)。
换句话说,间接目标函数反映的是目标函数或拉格朗日函数的最优值与参数之间的函数关系。
如果最优化模型求的是最大值,则相应的间接目标函数亦称为最大值函数,反之称为最小值函数。
⑵ 最大值函数:无约束参数模型无约束参数模型max (,)xf x a的解为()x x a *=。
代入目标函数后有(,)f x a *。
此即为最大值函数()V a :()(,)V a f x a *⑶ 最大值函数:等式约束参数模型等式约束参数模型max (,) s.t. (,)0xf x ag x a =的拉格朗日函数模型为:,,max (,,)max[(,)(,)]x x L x a f x a g x a λλλλ=+它的解为:()()x x a a λλ**==代入拉格朗日函数后有(,,)L x a λ**。
此即为最大值函数()V a :()(,,)(,)(,)(,)V a L x a f x a g x a f x a λλ******=+=⑷ 最大值函数与目标函数最大值函数与目标函数之间的关系可参见下图。
首先来看最大值函数,即图中的曲线()(,)((),)V a f x a f x a a *==。
当参数1a a =时,经过最优化,选择变量为11()x x a =,最大值函数为111()((),)V a f x a a =。
如果参数变化到2a a =,则最优选择变量为22()x x a =,最大值函数为222()((),)V a f x a a =。
其次来看目标函数,即图中的曲线(,)f x a 。
我们有两种方法来讨论目标函数的变化。
第一种方法是固定参数而让选择变量变化。
例如,固定参数1a a =而让选择变量x 变化。
此时,目标函数为1(,)f x a 。
由于111(,)((),)f x a f x a a ≤,故目标函数值位于点A 以下的虚线上(包括点A )。
通信中级工程师考试通信专业实务(中级)(完整资料).doc

【最新整理,下载后即可编辑】通信中级工程师考试通信专业实务(中级)一、填空题1. 无线电波是一种电磁辐射, 当前用于无线通信的频率范围已经从3kHz扩展到100GHz2. 无线电波在自由空间中的传播速度与光速一样, 都是大约3*108m/s3. 无线电波以横向电磁波的形式在空间中传播。
4. 与光的传播一样, 无线电波在从一种介质进入另一种具有不同传播速度的介质时, 也会发生折射5. 最简单的电磁波源是空间中的点波源6. 基带信号可分为数字基带信号和模拟基带信号两种, 调制也分为数字调制和模拟调制。
7. 在发送端需要把数字基带信号的频谱搬移到带通信道的通带范围内, 这个频谱的搬移过程称为数字调制。
相应地在接收端需要将己调信号的频谱搬移回来,还原为数字基带信号,这个频谱的反搬移过程称为数字解调8. 二进制数字相位调制又分为二进制绝对调相2PSK和二进制相对调相2DPSK9. 数字基带信号是低通型信号, 其功率谱集中在零频附近,它可以直接在低通型信道中传输。
10. 跳频系统的频率随时间变化的规律称为跳频图案。
11. 移动通信的发展趋势表现在小型化、宽带化、网络融合化和业务综合化、智能化和软件化、个人化12.GSM 系统常用的频率复用方式为 4 ×313.GSM 系统基站子系统由基站收发信机组、基站控制器14.GSM 系统的工作频段分为900M,1800M频段15.GSM 系统采用频分双工方式。
16.GSM 系统全速率业务信道速率为22.8kbit/s17.同GSM 系统相比,GPRS 网络中在BSC 部分增加了PCU18.GPRS 业务可分为点对点、点对多点业务。
19.IS-95 系统前向信道包括1个导频信道、1个同步信道、1~7个寻呼信道、55个前向业务信道。
20.IS-95 及cdma20001x 数字蜂窝移动通信系统频道间隔为1.23MHz, 其基本频道的序号为28321.CDMA 系统通过采用RAKE 接收技术可以克服多径的不利影响, 带来路径分集的好处。
MIMO通信系统中的检测算法
MIMO通信系统中的检测算法在MIMO(Multiple-Input Multiple-Output)通信系统中,检测算法是非常重要的,它可以帮助接收端准确地恢复发送端发送的数据。
MIMO系统通过在发送端和接收端同时使用多个天线,可以显著提高系统的容量和可靠性。
然而,由于多天线导致的信号间干扰,MIMO系统的检测变得更加复杂。
本文将介绍一些常见的MIMO检测算法。
2. 最小均方误差(Minimum Mean Square Error,MMSE)检测算法:MMSE算法是一种基于线性检测算法的改进算法。
它通过最小化接收信号与已知发射信号之间的均方误差来进行检测。
MMSE算法可以有效地减小干扰信号,并提高系统的误码率性能。
3. 梯度投影算法(Gradient Projection,GP):GP算法是一种基于优化的检测算法。
它通过将MIMO通信系统中的检测问题转化为约束优化问题来进行检测。
GP算法通过不断迭代优化接收信号估计来最小化损失函数,并在每次迭代中进行梯度投影来满足约束条件。
该算法可以在复杂的MIMO系统中实现近似最优的检测性能。
4. 近似消息传递算法(Approximate Message Passing,AMP):AMP算法是一种基于概率图模型的检测算法。
它通过树型图和因子图的推断方法来进行检测。
AMP算法在分布估计和误码率性能方面表现出色,尤其适用于大规模MIMO系统。
5. 近似最小误码率(Approximate Minimum Bit Error Rate,AMBER)算法:AMBER算法是一种适用于多用户MIMO系统的近似检测算法。
它通过近似计算最小误码率而不是最小误码率信噪比来进行检测。
AMBER算法可以有效地减小计算复杂度,并且在高信噪比下性能接近于最优检测算法。
总结起来,MIMO通信系统中的检测算法有线性检测算法、MMSE算法、GP算法、AMP算法和AMBER算法等。
这些算法在不同的场景和要求下具有不同的优势和性能。
2011年河南省优秀博士、硕士学位论文评选结果

学位授予单位 解放军防空兵指挥学院 河南财经政法大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南大学 河南工业大学 河南工业大学 河南科技大学 河南科技大学 河南科技大学 河南科技大学 河南科技大学
2011S035 2011S038 2011S04 2011S009 2011S020 2011S049 2011S100 2011S001 2011S005 2011S010 2011S011 2011S040 2011S046 2011S066 2011S085 2011S086 2011S095 2011S016 2011S032 2011S048 2011S078 2011S081
华北水利水电学院 华北水利水电学院 华北水利水电学院 华北水利水电学院 解放军外国语学院 解放军外国语学院 解放军外国语学院 解放军信息工程大学 解放军信息工程大学 解放军信息工程大学 解放军信息工程大学 洛阳耐火材料研究院 新乡医学院 新乡医学院 新乡医学院 新乡医学院 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学 郑州大学
2011 年河南省优秀博士学位论文评选结果
编号 2011B01 2011B02 2011B03 2011B04 2011B05 2011B06 2011B07 2011B08 2011B09 2011B10 2011B11 2011B12 2011B13 2011B14 论文题目 具有 N-Peakon 的新可积模型与孤子方程的代数几何解 伊洛河流域景观动态及其径流效应研究——以伊河上游地区为例 b→s 无粲衰变唯象研究及新物理探索 事件句法与现代汉语非宾格现象研究 卫星重力梯度数据处理理论与方法 肯定/否定篇章隐含情感倾向性分析——基于构式语法的特征提取 采动变形场对瓦斯抽采及突出预测影响的研究 钯催化的双 C-H 键活化反应研究 基于 7-磷杂降冰片烯衍生物的化学反应研究 基于主动策略的抗毁路由协议研究 基于仿生矿化的无机功能材料的制备和表征 乳头状甲状腺癌血清标记物的筛选与鉴定 唐代试赋研究 玉米株型相关性状分子遗传机理研究 薛波 梁国付 常钦 杨大然 吴星 敖锋 高军伟 吴俊良 田荣强 王滨 胡彬彬 樊玉霞 王士祥 库丽霞 作者 指导教师 耿献国 丁圣彦 杨亚东 程工 张传定 李绍山 张铁岗 吴养洁 Francois Mathey 郭云飞 杜祖亮 王家祥 陈飞 陈彦惠 学位授予单位 郑州大学 河南大学 河南师范大学 解放军外国语学院 解放军信息工程大学 解放军外国语学院 河南理工大学 郑州大学 郑州大学 解放军信息工程大学 河南大学 郑州大学 郑州大学 河南农业大学
无人系统导航定位技术---卡尔曼滤波与组合导航技术

(Z HXˆ )T(Z HXˆ ) 0
X X Xˆ
Xˆ (H T H )1 H T Z
1 最优估计与卡尔曼滤波
1.1 最优估计的基本概念
最小二乘估计的特点:
优点:算法简单,不必知道量测误差的统计信息; 局限性:
(1)只能估计确定性的常值向量,无法估计随机向量的 时间过程;
(2)最优指标只保证了量测的估计均方误差之和最小, 而并未确保被估计量的估计误差达到最佳,所以估计精度 不高。
被估计向量
Zi Hi X Vi
量测向量
量测矩阵
随机量测噪声
1 最优估计与卡尔曼滤波
1.1 最优估计的基本概念
最小二乘估计
Z1 H1X V1 Z2 H2 X V2 Zr Hr X Vr
mn
m1
m1
Z HX V
n1
指标函数:J( Xˆ ) (Z HXˆ )T(Z HXˆ ) min
J
预测和平滑
设在[t0,t1] 时间段内量测为Z,待求状态为 X (t)
当t=t1时, Xˆ (t) 称为X(t)的估计; 当t>t1时, Xˆ (t) 称为X(t)的预测;
t0
t1
Z 计算
t
Xˆ (t)
1 最优估计与卡尔曼滤波
1.1 最优估计的基本概念
达到
某一指标函数
最小
若以量测估计的偏差的平方和达到最小为指标
互不相关,则: Xˆ MV (Z ) mX (CX H T CV )1(Z Hm X )
P CX CX H T (HC X H T CV )1 HC X
1 最优估计与卡尔曼滤波
1.1 最优估计的基本概念
最小方差估计 还可写成:
Xˆ MV
信号检测与估计理论
信号检测与估计理论介绍信号检测与估计理论是数字通信和统计信号处理中的一个重要领域。
它研究的是如何准确地检测到信号的存在以及对信号进行估计。
该理论在许多实际应用中具有重要意义,包括雷达系统、通信系统、生物医学信号处理等。
信号检测在信号检测中,我们的目标是从观测到的信号中确定是否存在某个特定的信号。
通常情况下,我们将信号检测问题建模为一个假设检验问题,其中有两个假设:零假设H0表示没有信号存在,备择假设H1表示信号存在。
在信号检测中,我们通过设计一个检测器来根据观测到的信号样本进行决策。
常用的检测器包括最大似然检测器、贝叶斯检测器等。
这些检测器利用观测到的信号样本的统计特性,通过最大化某个准则函数(如似然比)来做出决策。
信号估计信号估计是根据观测到的信号样本,估计出信号的参数或者信号本身的过程。
信号估计有多种方法,包括参数估计和非参数估计。
在参数估计中,我们假设信号遵循某个已知的参数化模型,并通过观测到的信号样本去估计这些参数。
常用的参数估计方法有极大似然估计、最小二乘估计等。
这些方法基于最优准则来选择最优参数估计。
非参数估计不需要对信号满足某个特定的参数化模型的假设,它们通常利用样本的统计特性来进行估计。
常用的非参数估计方法有最小二乘法、核方法等。
检测与估计的性能评价在信号检测与估计中,我们需要对检测与估计的性能进行评价。
通常情况下,我们使用概率误差、均方误差等作为评价指标。
在信号检测中,我们常用的评价指标有误报概率和漏报概率。
误报概率指当信号不存在时,检测器判定信号存在的概率;漏报概率指当信号存在时,检测器未能正确判定信号存在的概率。
在信号估计中,我们常用的评价指标有均方误差和偏差方差平衡等。
均方误差指估计值和真实值之间的平均平方误差;偏差方差平衡则是指在估计和真实值之间平衡偏差和方差。
应用领域信号检测与估计理论在许多领域都有广泛的应用。
其中,雷达系统是一个重要的应用领域。
在雷达系统中,我们需要通过检测和估计来实现目标检测、目标定位等功能。
量子测量中的量子后验概率与最优估计

量子测量中的量子后验概率与最优估计量子测量是量子力学中的重要概念,它描述了在测量一个量子系统时,所获得的结果以及这些结果出现的概率。
在传统的经典物理中,测量是确定性的,即给定系统的初始状态和测量设备的性质,就能够准确地得到测量结果。
然而,在量子力学中,测量是随机的,只能得到一系列可能的结果,并且每个结果出现的概率是由量子态的性质决定的。
量子后验概率是指在已经得到某个测量结果的情况下,对量子态的后续状态进行概率描述。
它是由贝叶斯定理给出的,根据已有的信息来更新对量子态的估计。
量子后验概率的计算可以通过量子贝叶斯规则来实现。
最优估计是指在给定一系列测量结果的情况下,通过对这些结果进行处理,得到对量子态的最优估计。
最优估计的目标是使估计的误差最小化。
在量子测量中,最优估计可以通过最小二乘法或者最大似然估计来实现。
量子后验概率和最优估计在量子信息科学中具有重要的应用。
它们可以用于量子通信、量子计算和量子控制等领域。
在量子通信中,量子后验概率可以用于解决量子信道容量估计的问题。
量子信道是指将一个量子态传送到另一个位置的物理过程。
在量子通信中,信道的容量是指通过该信道传输的最大量子信息量。
通过对已知的测量结果进行量子后验概率的计算,可以估计信道的容量,并优化通信协议的设计。
在量子计算中,最优估计可以用于解决量子态重构的问题。
量子态重构是指通过一系列测量结果来恢复未知的量子态。
最优估计可以通过最小二乘法来重构量子态,并减小估计的误差。
量子态重构在量子计算中具有重要的意义,它可以用于验证量子计算机的正确性和优化量子算法的设计。
在量子控制中,量子后验概率可以用于解决量子系统参数估计的问题。
量子系统的参数估计是指通过一系列测量结果来估计量子系统的参数。
通过对已知的测量结果进行量子后验概率的计算,可以估计量子系统的参数,并优化控制策略的设计。
总之,量子测量中的量子后验概率和最优估计在量子信息科学中具有重要的应用。
它们可以用于解决量子通信、量子计算和量子控制等领域的问题。
copula参数估计的不同方法

copula参数估计的不同方法标题:不同方法下的copula参数估计介绍:copula是用来描述多变量随机关系的强大工具,它能够将边缘分布与联合分布解耦,从而更好地探索随机变量之间的关系。
copula参数估计是研究copula模型中的一个关键问题,不同的估计方法可以对copula模型的性能和预测能力产生重大影响。
本文将探讨不同的copula参数估计方法以及它们的特点和应用。
一、介绍copula参数估计copula参数估计是基于观测数据来估计copula模型中的参数。
目标是通过最大似然估计或其他统计学方法找到最佳拟合数据集的copula 模型参数。
不同的copula参数估计方法主要包括经典参数估计、半参数估计和非参数估计。
二、经典参数估计方法1. 最大似然估计(MLE)最大似然估计是一种常用的参数估计方法,在copula模型中也有广泛的应用。
该方法通过最大化观测数据的似然函数来估计copula模型的参数。
常见的MLE方法包括正态法、t-估计和极大似然估计。
这些方法在不同的数据情况下有不同的适用性和效果。
2. 其他经典参数估计方法除了MLE方法,还有一些其他经典参数估计方法可以用于copula模型,如矩匹配方法和估计方程方法。
这些方法在一些特定情况下可以提供更稳健的估计结果,并且具有较好的理论基础。
三、半参数估计方法半参数估计方法是通过结合有限维边缘分布和copula函数的参数来估计copula模型的参数。
半参数估计方法可以通过最小二乘法或采用半参数模型来求解。
这些方法对数据的分布做出了一定的假设,并且可以处理维度较高的数据集。
四、非参数估计方法非参数估计方法是一种不对数据分布做出假设的参数估计方法,它直接从数据中估计copula函数的形状和参数。
非参数估计方法在处理复杂的数据集时具有较强的灵活性和适应性。
常见的非参数估计方法包括核密度估计和局部估计方法。
五、总结与回顾不同的copula参数估计方法各有优缺点,在不同的数据情况下有着不同的适用性。
深光晶格势阱巾凝聚体的扭结包络隙孤子

光晶格势阱的轴向谐振频率为%K )*-++BL ;c
而其径向谐振频率是%( )*-+,L ;c的外部光晶
格势阱 并设每个光晶格势阱约承载"++ 个,e 0W
原子凝聚体 由于 因而 B
%KL%( " +B++F ( A
C97所局陷的外部光晶格势阱可看作为准一维的
9OUX\QPP 等&AA' 在局陷于光晶格势阱的C97体系 方法来研究局陷于光晶格势阱中的C97的动力学
中实验观察到了一种隙孤子!?QK S&'OY&P$" 且这一 行为B已有研究表明" 对于局陷于光晶格势阱深
收稿日期 *+*A@+e@AL 基金项目 国家自然科学基金!AA,!*+AF" LLeeL$eA$ 作者简介 杨如曙!A"F!,$" 男" 湖南常德人" 硕士" 教授" 主要研究方向为非线性原子链和玻色G爱因斯坦凝聚体等领域的非线
力学特性 B *+ 事实上局陷 的光晶格势阱的深度越深
C97
Y
)
5 *
%*KK*
S%*(T*
SW*
S$+ SOP*RK
A
则光晶格势阱内的凝聚体被束缚得越紧 而光晶格 其中 $+和R)*-L.分别是C97所局陷的外部
势阱之间的凝聚体隧穿效应会明显增强!(当局陷 光晶格势阱的势阱深度和所形成光晶格势阱的激
$B
体物理学中的平面波方法可知&A"'" 晶格与凝聚体
线性散焦 PT 对称波导中饱和非线性孤子传输与控制说明书
第 52 卷第 6 期2023 年 6 月Vol.52 No.6June 2023光子学报ACTA PHOTONICA SINICA 线性散焦PT 对称波导中饱和非线性孤子传输与控制武琦,王娟芬,杜晨锐,杨玲珍,薛萍萍,樊林林(太原理工大学 光电工程学院,太原 030600)摘要:为了研究线性散焦宇称-时间对称双通道波导中分数阶衍射饱和非线性下孤子的模式以及孤子的传输与控制,通过改进的平方算子迭代法对含有线性势的分数阶饱和非线性薛定谔方程进行数值计算得到孤子模式,傅里叶配置法判断孤子线性稳定性,并利用分步傅里叶法模拟仿真孤子的传输。
研究结果表明:在散焦饱和非线性中,该宇称-时间对称波导可支持稳定的双峰灰孤子模式。
随着饱和非线性系数和传播常数绝对值的增大,双峰灰孤子的背景强度增大,灰度值减小,功率增大。
Lévy 指数、增益/损耗系数和饱和非线性系数的增加会导致孤子的横向能流密度变化增大,但在波导通道位置处接近于0。
在聚焦饱和非线性下,线性散焦宇称-时间对称波导对亮孤子光束具有控制作用。
当光束在波导中心输入,孤子以呼吸子的形式长距离传输;在非波导中心输入,光束以初始输入位置为边界振荡传输。
随着饱和非线性系数的增大,光束的振荡频率增加,光束宽度变宽,峰值强度减小。
宇称-时间对称波导势阱深度的增加会导致光束的振荡频率增加,峰值强度增加。
该研究结果可为宇称-时间对称波导对光束的控制提供一定的理论参考。
关键词:非线性光学;宇称-时间对称光波导;灰孤子;光束控制;饱和非线性;分数阶薛定谔方程中图分类号:O437 文献标识码:A doi :10.3788/gzxb20235206.06190010 引言宇称-时间(Parity -Time , PT )对称的概念起源于量子力学,它表示系统在宇称变换和时间反演变换下的对称性。
1998年,BENDER C M 等发现非厄米哈密顿量如果满足PT 对称且势函数虚部不超过对称破缺点,则其具有实的本征值谱[1-2]。
包络熵作为适应度函数

包络熵作为适应度函数
(原创实用版)
目录
1.包络熵的定义与概念
2.包络熵作为适应度函数的优势
3.包络熵在遗传算法中的应用
4.结论
正文
一、包络熵的定义与概念
包络熵(Envelope Entropy)是一种描述符号序列不确定性的度量方法,它是基于熵理论发展起来的。
在信息论中,熵用于衡量一个随机变量的不确定性。
而包络熵则是用来度量一个符号序列的熵,它是序列中各个符号的熵的加权和。
二、包络熵作为适应度函数的优势
1.全局搜索能力:包络熵作为适应度函数,具有很强的全局搜索能力。
它能够充分考虑整个符号序列的信息,而不仅仅是局部信息。
2.鲁棒性:包络熵对输入数据的变化具有较强的鲁棒性,能够较好地处理噪声和不确定性。
3.计算简便:相比于其他复杂的适应度函数,包络熵的计算较为简单,降低了算法的复杂度。
三、包络熵在遗传算法中的应用
遗传算法(Genetic Algorithm, GA)是一种模拟自然界生物进化过程的优化算法。
在遗传算法中,适应度函数是评价个体优劣的重要依据。
包络熵作为适应度函数,在遗传算法中的应用具有以下优势:
1.在遗传算法的编码阶段,可以使用包络熵作为适应度函数来编码符号序列,从而提高编码的效率。
2.在遗传算法的选择阶段,包络熵作为适应度函数可以提供全局搜索能力,使得算法更容易找到全局最优解。
3.在遗传算法的交叉和变异操作中,包络熵可以作为参考指标,以保证新产生的个体具有较好的适应度。
四、结论
包络熵作为适应度函数,在遗传算法中具有较强的全局搜索能力和鲁棒性,同时计算简便。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a
Kotel’nikov Institute of Radio Engineering and Electronics, Russian Academy of Sciences, building 7, ul. Mokhovaya 11, GSP 9, Moscow K 9, 125009 Russia b Kharkov National University, pl. Svobody 4, Kharkov, 61077 Ukraine e mail: potapov@cplire.ru 73
cyclic frequency. Then, the dimensionless period is 2π 4π T= = . ω u1 u2 As the envelope soliton duration ts, take the dis tance between two points on the time axis where the envelope decreases by a factor of n as compared to its maximum value. Then, 2κ ts = 2 ν T = . α κ , where ν is the number of periods along νT half the envelope soliton duration: As α = κ = ln ( n + n – 1 ) . In this study, it was assumed for certainty that n = e. Then, κ ≈ 1.66. DETECTION OF THE ENVELOPE SOLITON As is known (see, for example, [9]), when the con dition L = Ws [ x ( t ) ] > L th Ww [ x ( t ) ] (3)
ISSN 1028 3358, Doklady Physics, 2011, Vol. 56, No. 2, pp. 73–77. © Pleiades Publishing, Ltd., 2011. Original Russian Text © Yu.V. Gulyaev, S.V. Panasenko, A.A. Potapov, L.F. Chernogor, 2011, published in Doklady Akademii Nauk, 2011, Vol. 436, No. 5, pp. 606–610.
ϕ0 =
u1 ( x – φ0 ) – u2 ( x – x0 ) . 2
Similarly to narrowband radio signals, we call ϕ0 a dimensionless initial phase and ω, a dimensionless
74
GULYAEV et al.
u × exp i 1 ( x – u 2 t – φ 0 ) . 2
Here b = ( u 1 – 2 u 2 ) u 1 and u1, u2 are the envelope and phase propagation velocities, and x0 and φ0 are the initial coordinate and phase, respectively. For further analysis, the real part of function (2) was used presented for a fixed coordinate in the form v(t) = where A = and b , 2β α = bu 1 , 2 τ = x – x0 , u1 ω = u1 u2 , 2 A cos [ ω ( t – τ ) – ϕ 0 ] , cosh [ α ( t – τ ) ]
u 2
is satisfied, where Ww[x(t)] and Ws[x(t)] are the plausi bility functionals in the absence and presence of the detected signal s(t) in the received signal x(t), respec tively, and Lth is the threshold value of detection crite rion L, the solution on the presence of the detected signal is made. If the interfering signal w(t) is normal white noise, expression (3) can be written as [9]
PHYSICS
Optimal Detection and Optimal Estimation of Parameters of the Envelope Soliton
Academician Yu. V. Gulyaeva, S. V. Panasenkob, A. A. Potapova, and L. F. Chernogorb
k k
X1 + Y1 ,
k k k
2
2
∑ a [ X cos ( ω τ ) + Y sin ( ω τ ) ] ,
k
Y1 = Here,
∑ b [ Y cos ( ω τ ) – X sin ( ω τ ) ] .
k k k k k k
π ( ω – ωk ) π ( ω + ωk ) a k = π sech + sech , 2α 2α α t0 π ( ω – ωk ) π ( ω + ωk ) b k = π sech – sech , α t0 2α 2α and Xk and Yk are the estimates of amplitudes of the quadrature components of the signal x(t). Since ak ≈ bk, Xk and Yk have equal dispersions and the characteristic Z1 is distributed according to the Rayleigh–Rice law. Then, the expressions for proba bilities of false alarm p f . a . and signal skip ps.o. will acquire the form k p f . a . = exp ⎛ A ⎞ , ⎝ 2 κμ⎠ where
2
Upon detection of the envelope soliton with an unknown initial phase, expression (3) will be equiva lent to the condition Z 1 > Z 1 th , where Z1 = X1 =
k mq⎞ , ps .o . = Θ ⎛ a , ⎝ κμ 2 μ ⎠
L =
∫
λ
exp ⎛ ⎝
2 Z ( λ ) – E ( λ )⎞ W ( λ ) dλ > L th . ⎠ 0 N0
Θ ( u, v ) =
∫
0
ξ exp ⎛ – ⎝
ξ + v ⎞I 0 ( ξ v ) dξ , 2 ⎠
2
2
Here, N0 is the spectral density of the white noise power
Received October 18, 2010
DOI: 10.1134/S102833581102008X
INTRODUCTION At present, much attention is paid to generation, transmission, detection, and receiving of ultrawide band (UWB) signals (see, for example, [1]). These sig nals have considerable advantages over traditional nar rowband signals [1, 2]. One of the ultrawideband signal class is the nonlin ear UWB signals introduced by the authors of [2]. These signals are governed by solutions of the nonlin ear differential equations (Burgers, Korteweg–de Vries, Schrödinger, and other equations, [3, 4]) and, therefore, retain their form upon propagation in non linear medium. The aim of this study is to solve the problems of optimal detection against the additive white Gaussian noise background and optimal estimation of the parameters of the envelope soliton which is nonlinear UWB signal. The theory of optimal signal detection and optimal estimation of their parameters was developed by some authors [1, 5–7]. They solved the problems of optimal detection and optimal estimation of parameters mainly of narrowband and wideband signals. In study [8], the problem of optimal detection of UWB quasi radio signals was solved. Practical application of the result obtained is limited because of the necessity of numerical solution of integral equations and the com plexity and inconvenience of the calculations. THEORETICAL MODEL The nonlinear Schrödinger equation has the form (see, for example, [3])