永磁交流伺服电动机的参数分析_莫会成
交流伺服电动机解析,交流伺服电动机的基本类型、控制方式及其特点
交流伺服电动机解析,交流伺服电动机的基本类型、控制方式及其特点交流伺服电动机,是将电能转变为机械能的一种机器。
交流伺服电动机主要由一个用以产生磁场的电磁铁绕组或分布的定子绕组和一个旋转电枢或转子组成。
电动机利用通电线圈在磁场中受力转动的现象而制成的。
交流伺服电动机主要由定子部分和转子部分组成,其中定子的结构与旋转变压器的定子基本相同,在定子铁心中也安放着空间互成90度电角度的两相绕组(其中一组为激磁绕组,另一组为控制绕组)。
交流伺服电动机控制精度高,矩频特性好,具有过载能力,多应用于物料计量,横封装置和定长裁切机上。
交流伺服电动机的基本类型与普通交流电动机类似,交流伺服电动机也分为异步和同步两种。
两相交流伺服电动机原理上就是一台两相异步电动机。
它的定子上正交放置两相绕组,这两相绕组一个叫励磁绕组,另一相为控制绕组。
转子一般有两种结构形式,一种是笼型转子,这种转子的结构与普通笼型感应电动机的转子相同;另一种是非磁性空心杯转子,其结构如图所示。
笼型转子与空心杯转子比较。
前者输出力矩大、结构简单、励磁电流小、效率高,唯一不足是转子转动惯量大,因而动态响应不如空心杯转子快。
空心杯转子具有惯性小,反应灵敏,调速范围大、但这种电动机的励磁电流较大,因而功率因素和效率较低。
运行时,励磁绕组一般施加固定单相交流电压,通过对控制绕组的控制电压进行必要的控制来实现对转速的调节。
同时应注意,在相位上是不同的。
交流伺服电动机的控制方式交流伺服电动机的控制方式有三种:(1)幅值控制幅值控制通过改变控制电压Uc的大小来控制电机转速,此时控制电压Uc与励磁电压Uf之间的相位差始终保持90°电角度。
控制绕组为额定电压时所产生的气隙磁通势为圆形旋转磁通势,产生的电磁转距最大。
(2)相位控制通过改变控制电压Uc与励磁电压Uf之间的相位差来实现对电机转速和转向的控制,而控制电压的幅值保持不变。
Uc相位通过移相器可以改变,从而改变两者之间的相位差,(3)幅值相位控制励磁绕组串接电容c后再接到交流电源上,控制电压Uc与电源同相位,但幅值可以调节,当Uc的幅值可以改变时,转子绕组的耦合作用,使励磁绕组的电流If也变化,从而使励磁绕组上的电压Uf及电容上的电压uc也跟随改变,Uc与Uf的相位差?也随之改变,即改变Uc的大小,Uc与Uf的相位差也随之改变,从而改变电机的转速。
永磁交流伺服电动机转矩波动分析

摘 要 :永磁 交流 伺服 电动机 的 转矩 波 直 接 影 响 系统 的控 制 精度 ,是 最 为 关注 的伺 服 性 能指 标 之 一。 重 点分 析 了因电磁原 因引起 的 转矩 波 动及 其 对 电机 性 能 的 影 响 ,提 出 了减 小 转 矩 波 动 的
措 施 。论 文有较 好 的实 际应用价 值 。
, 】n
。 一
般 情 况 下 ,重 点 是 讨论 因 电 磁 原 因 而 引起
U
的转矩 波 动 。导 致 转 矩 波 动 的 因 素 较 多 ,既 和 电 动机本 体设 计 、电 机 结 构 和 加 工 工 艺 有 关 ,也 与 运行方 式 有关 ,甚 至还有 驱 动控制 器方 面的 因素 。
指标 。转矩 波 动 是 各 类 伺 服控 制 系 统 中最 关 注 的 伺 服性 能 指 标 之 一 ,它 是 指 伺 服 电机 在 某 一 时 刻 输 出转 矩 未 达 到 预 期 给定 而 出 现 的 转 矩 偏 差 。 当 偏 差值 的大 小 超 出所 规 定 的 范 围 时 ,电机 的伺 服 控 制性 能 和 控 制 精 度 将 受 到 不 同程 度 的影 响 。从
4 尽 管 具 有 磁 阻 转 矩 的性 质 ,但 电 机 中如 没 ) 有建立磁场 ,且 没有磁场能量 的变化 ,将 不会反 应 出转矩 。 齿槽转 矩 产 生 的 转矩 波 动 ,主要 影 响 表 现 在 : 低速时产生振动 ;高速时产生噪声 ; 并使伺服电机 可控 性变差 。减小 齿槽转矩可采取 以下几种方法 。
关键 词 :永磁 交流伺服 电动机 ;无刷 直 流 电动机 ;转矩 波动 ; 电磁 因素 ;措 施
An l i fPe ma t M a e a yss o r ne - gn tAC e v o or Tor e Ri l S roM t qu pp e
GTPY系列交流永磁伺服电动机性能参数

GTPY32-132-30 交流永磁电机性能指标
电动机型号
额定转矩 额定转速 最大转速 额定电压 额定电流 额定功率
线电阻 线电感 线电感
服务系数 20℃
Ld
Lq 冷却方式 防护等级
(N·m) (r/min) (r/min) (V) (A) (kW)
(mΩ) (mH) (mH)
GTPY20-18.5-30
59
3000
3600
380
35
18.5
1.15
145
1.2
1.1
IC416
IP54
GTPY20-22-30 交流永磁电机
GTPY20-22-30 交流永磁电机外形及安装尺寸
GTPY20-22-30 交流永磁电机性能指标
电动机型号
额定转矩 额定转速 最大转速 额定电压 额定电流 额定功率
(mΩ) (mH) (mH)
GTPY20-11-30
35
3000
3600
380
21
11
1.15
245
1.9
1.6
IC416
IP54
GTPY20-15-30 交流永磁电机
GTPY20-15-30 交流永磁电机外形及安装尺寸
GTPY20-15-30 交流永磁电机性能指标
电动机型号
额定转矩 额定转速 最大转速 额定电压 额定电流 额定功率
线电阻 线电感 线电感
服务系数 20℃
Ld
Lq 冷却方式 防护等级
(N·m) (r/min) (r/min) (V) (A) (kW)
(mΩ) (mH) (mH)
GTPY20-22-30
不同转子结构对永磁交流伺服电机弱磁特性影响

不同转子结构对永磁交流伺服电机弱磁特性影响莫为;汪梅;莫会成【摘要】该文探究了表贴式与内置式两种典型的永磁转子结构对永磁交流伺服电机的弱磁特性影响,推导了电压极限曲线中心位置在电流极限圆内、外电机输出最大机械与功率特性的变化规律.研究对象以弱磁基速点为分界点,在该点以下功率以直线规律上升且均能恒转矩运行;在该点以上,表贴式与内置式结构电机转矩分别呈下降趋势与先上升至最大点后再下降的趋势.电压极限曲线中心位置处于电流极限圆内与圆外时,功率继续上升至最大点之后分别呈最大恒功率运行状态和快速下降趋势,并证明弱磁运行最大输出功率大于传统的弱磁运行恒功率值.该文的分析推导与实验结果相一致,为永磁交流伺服电机弱磁运行时的特性分析提供了较为详实的理论基础.【期刊名称】《电工技术学报》【年(卷),期】2018(033)0z1【总页数】10页(P89-98)【关键词】永磁交流伺服电机;弱磁控制;机械特性;功率特性【作者】莫为;汪梅;莫会成【作者单位】西安微电机研究所西安 710077;西安科技大学电气与控制工程学院西安 710054;陕西科技控股集团西安710077【正文语种】中文【中图分类】TM351永磁交流伺服电动机具有体积小、效率高、可靠性强及很高的转矩惯量比等优异特性,被广泛用于新能源电动汽车与工业驱动领域[1]。
为了达到更高的转速与效率,多采用弱磁控制策略。
弱磁控制不仅能解决母线电压受限制及电机旋转转速高于额定转速的矛盾,同时,又能保证电机低速时的各项性能指标[2]。
国内、外诸多学者与研究机构已开展了大量关于转子结构对永磁交流伺服电机弱磁特性影响的研究。
S. Morimoto教授最早奠定了永磁交流伺服电机弱磁的基本理论,给出了基本弱磁轨迹,区分了电机工作区域,并优化了轨迹公式。
美国国家橡树岭实验室与日本电机工程实验室分别提出了无刷混合励磁与多层永磁体结构励磁的理论与设计方案,总体上提升了弱磁扩速范围,改善了电机弱磁运行时电流过大的去磁影响,提高了电机弱磁运行效率。
交流永磁伺服电机知知识点总结

交流永磁伺服电机是一种广泛应用于现代工业和自动化领域的重要设备。
以下是对交流永磁伺服电机的一些主要知识点的总结:
1.工作原理:交流永磁伺服电机的工作原理基于磁场与电流之间的相互作用。
通过控制电机的电流,可以改变电机的磁场,进而控制电机的转动。
2.结构:交流永磁伺服电机主要由定子、转子和控制器组成。
定子包含一个或多个绕组,用于产生励磁磁场。
转子通常由永磁体构成,用于产生转矩。
控制器负责控制电机的电流和电压,以实现电机的精确控制。
3.控制方式:交流永磁伺服电机可以通过开环或闭环控制方式进行控制。
开环控制通过给定电压或电流控制电机的转速和位置,而闭环控制则通过反馈信号与设定值比较,实现电机的精确控制。
4.优点:交流永磁伺服电机具有高效率、高精度、高响应速度等优点。
此外,由于其采用永磁体作为转子,因此具有较高的扭矩密度和较低的维护成本。
5.应用领域:交流永磁伺服电机广泛应用于机床、机器人、电力电子、航空航天等领域。
在这些领域中,交流永磁伺服电机被用于精确控制机器的运动和位置,实现高效、精准的生产和加工。
以上是对交流永磁伺服电机的一些主要知识点的总结。
在实际应用中,需要根据具体的应用场景和需求选择合适的交流永磁伺服电机,并进行合理的配置和控制。
分数槽集中绕组永磁交流伺服电机定子磁动势及绕组系数分析_田园园
定子磁势进行傅里叶级数展开,得到分数槽集中绕组磁势各次谐波的频谱图 。 通过对频谱的分析,得到分数槽集中 绕组永磁交流伺服电机定子磁势的谐波分布规律 。在磁势谐波频谱的基础上分析了分数槽集中绕组的绕组系数,得 到了绕组系数分布规律及绕组系数表 。为分析解决分数槽集中绕组永磁交流伺服电机其它问题打下基础,为电机的 设计提供依据。 关键词: 分数槽集中绕组; 永磁电机; 磁动势; 绕组系数; 谐波分析 中图分类号: TM351 ; TM383. 4 文献标志码: A 文章编号: 1001-6848 ( 2012 ) 04-0001-07
·2 · 中绕组磁动势及其绕组系数进行分析, 得到其谐波 磁场的分布运行规律非常必要。 根据实际使用情况的调查了解, 当前大多数情 况下都使用的是双层集中绕组, 只有在少数情况下 使用单层绕组, 因此本文主要针对三相分数槽双层 集中绕组的绕组磁势及绕组系数进行分析 。 子磁路的磁压降为零; ( 3 ) 忽略齿槽效应。
4期
田园园等: 分数槽集中绕组永磁交流伺服电机定子磁动势及绕组系数分析
·3 ·
所以 A 相 绕 组 的 连 接 方 式 为 1 头—1 尾—2 尾—2 头—9 尾—9 头。然后根据各相绕组互差 120ʎ ,同理 我们可以得到 B 相和 C 相绕组的连接方式。 八极九 槽单元电机定子绕组的展开图之一如图 5 所示。
图1 绕组磁势Байду номын сангаас析流程图
角为: α =
1. 1
一个线圈的磁动势 图 2 表示一个匝数为 N 的线圈,线圈的节距 y = 1,
2 p0 π 2 ˑ 4 ˑ 180ʎ = = 160ʎ , 其绕组齿磁势 Z0 9
星形图( 槽电势星形图) 如图 4 所示。
[ 6 ] 线圈的轴线位于原点 x = 0 处的磁场分布示意图 。
永磁交流伺服电动机弱磁控制性能分析(上)
?@引@言
磁场是电机进行机电能量转换的媒介和基础 电机的性能与特性由电机气隙磁场的建立方式 幅 值大小 分布规律 分析计算与控制策略等因素所 决定 弱磁是对电机磁场进行的一种控制策略或方
ห้องสมุดไป่ตู้
式 故名思义 一般是对一台已设计好的具有相对 稳定气隙磁场的电机 通过磁场幅值的削弱或磁场 相位的调节来改变电机的运行状态和运行性能的控 制策略
!"#$%&'()'*+*, -.*/0.".12'03(*'*/4(,*'/5-6'07. 4./.0
(,<6=>?@AB# (,C@=$ D,4EF=# G,HI6# #!"#$$%&'"(')%()$%* +)(#%,-,./0,-*'%. 12,345,! 67*! 8'9$% '#%%'' 5#'%$
$!8'9$% :'(2,;,7,2<)=)$2(# >%=7'737) 8'9$% '#%%'' 5#'%$
589/0(:/ -?=JKLK@MJNLMN=ABOM0P N?@QLJ=>KM0K@MN=@J0OO16R9S@LT@A=AB K0=AN@U 06NN?LNN?@O16R9 S@LT@A=AB>0ANM010OK@MPLA@ANPLBA@N8*J@MV0P0N0M>LA =PKM0V@N?@K@MO0MPLA>@0OP0N0MLAU UM=V@ JWJN@P38=P=ABLNN?@K@MPLA@ANPLBA@N=>M0N0MJNM6>N6M@S=N? U=OO@M@ANJL1=@ANK01@J N?M@@>LJ@J0ON?@ K@MPLA@ANPLBA@N8*J@MV0P0N0MV01NLB@1=P=N>6MV@>@AN@M=A N?@>6MM@AN1=P=N>=M>1@ N?@>=M>1@LAU N?@>=M>1@S@M@LAL1WX@U =A U@NL=1 0A N?@QLJ=>KM=A>=K1@0OO16R9S@LT@A=AB>0ANM013D@M=V@U N?@>?LAB@ 1LS0ON?@S?01@MLAB@0OP@>?LA=>L1LAU K0S@MOM0P N?@O16R9S@LT@A=ABQLJ@JK@@U N0N?@PLR=P6P O16R9S@LT@A=ABJK@@U LAU N?@>?LML>N@M=JN=>>6MV@SLJUMLSA N?@PLR=P6P K0S@MLAU N0MY6@K0=AN LAU N?@PLR=P6P K0JJ=Q1@S@LT PLBA@N=>MLAB@S@M@0QNL=A@U38>>0MU=ABN0N?@LAL1WJ=JM@J61NJ N?@ =AO16@A>@0ON?@JL1=@ANK01@MLN@ N?@PLR=P6P >6MM@ANLAU N?@@R>=NLN=0A >6MM@AN N?@PLBA@N=>>=M>6=N LAU N?@P0N0MJNM6>N6M@0ON?@P0N0M N?@U=M@>NLR=J=AU6>NLA>@LAU 0N?@MOL>N0MJ0A N?@P0N0MS@LT PLB9 A@N=>K@MO0MPLA>@S@M@U=J>6JJ@U M@JK@>N=V@1W LAU N?@>?LML>N@M=JN=>J0ON?@P0N0M10JJ=A O16R9S@LT@9 A=ABS@M@QM=@O1WLAL1WX@U3 ;'< =.0>9 K@MPLA@ANPLBA@N8* J@MV0 P0N0M O16R9S@LT@A=AB >0ANM01 P@>?LA=>L1 KM0K@MN=@J K0S@MKM0K@MN=@J
基于Ansoft的永磁交流伺服电动机转矩波动分析
永磁电机专题2008年第4期 15基于Ansoft 的永磁交流 伺服电动机转矩波动分析黄 越 唐任远 韩雪岩(沈阳工业大学特种电机研究所,沈阳 110023)摘要 永磁交流伺服电动机的转矩波动直接影响系统的控制精度,是最为关注的伺服性能指标之一。
本文基于Ansoft 公司的Maxswell 2D 的仿真环境,建立了永磁交流伺服电动机的系统仿真模型。
在所建立的模型基础上,对电机参数的改变对转矩波动的影响进行了仿真研究,仿真结果与实验结果基本一致,为电机的优化设计提供了依据。
关键词:永磁交流伺服电动机;转矩波动;AnsoftTorque Ripple Analysis of Permanent-magnetAC Servo Motor Base on AnsoftHuang Yue Tang Renyuan Han Xueyan(Shenyang University of Technology Research Institute of Special Electric Machines, Shenyang 110023)Abstract Torque ripple of permanent-magnet AC servo motor directly influences system control accuracy, is one of the most attention performance index .This paper establish the modeling of permanent-magnet AC servo motor using Maxwell 2D of Ansoft corporation. According to the change of the motor parameters, the torque ripple is analyzed based on the model .Compared with experiment data , the simulation results are uniform, and it offer optimized method.Key words :AC servo motor ;torque ripple ;Ansoft1 引言转矩波动是各类伺服控制系统中最关注的伺服性能指标之一,它是指电机在输出转矩围绕预期给定值而出现的转矩偏差。
交流伺服系统主要参数与设定方法
交流伺服系统主要参数与设定方法大部分交流伺服系统位置环均采用比例调节器,因为积分调节虽然可以减小系统的静差,但是会产生位置超调,在需要高跟随性能的系统中,可以增加位置前馈增益参数。
速度环和电流环采用比例积分调节器。
下面对影响数控机床性能的交流伺服主要参数及意义说明如下:速度比例增益参数主要是设定速度环调节器的比例增益,增益越高,刚度越大,参数数值根据具体的伺服驱动系统型号和负载情况确定,一般情况下,负载惯量越大,设定值越大。
速度积分频率参数(速度积分频率为速度积分时间的倒数)主要是设定速度环调节器的积分频率,积分频率越大,刚度越大,参数数值根据具体的伺服驱动系统型号和负载情况确定,一般情况下,负载惯量越大,设定值越小。
速度检测低通滤波器参数,主要是设定速度检测低通滤波器特性,数值越小,截止频率越低,电机产生的噪音越小,如果负载惯量很大,可以适当减小设定值。
数值太小,造成响应变慢,可能会引起振荡。
位置比例增益参数,主要是设定位置环调节器的比例增益,设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小,但数值太大可能会引起振荡或超调。
电流积分频率参数,主要是设定电流环调节器的积分频率,积分频率越大,积分速度越快,电流跟踪误差越小,但积分时间太大,会产生噪声或振荡,该参数仅与伺服驱动器和电机有关,与负载无关,一般情况下,电机的电磁时间常数越大,积分频率越小,在系统不产生振荡的条件下,该参数尽量设定的较大。
电流比例增益参数,主要是设定电流环调节器的比例增益,增益越高,电流跟踪误差越小,但增益太高,会产生噪声或振荡,该参数仅于伺服驱动器和电机有关,与负载无关,在系统不产生振荡的条件下,该参数尽量设定的较大。
电流或转矩指令低通滤波器截止频率参数,该参数主要是设定电流或转矩指令低通滤波器截止频率,用来限制电流或转矩指令频带,避免电流或转矩冲击和振荡,使电流、转矩响应平稳。
调节改变交流伺服参数,伺服系统的特性发生改变,比例环节参数的作用即成比例的反映控制系统的偏差信号,当偏差一旦产生,控制器立即产生控制作用,以减少偏差;积分环节作用主要用于消除静差,提高系统的无差度;滤波器的作用主要限制反馈指令的频带,避免外部干扰冲击和震荡,控制系统响应平稳。
现代高性能永磁交流伺服系统综述_永磁电机篇_莫会成

第46卷2013年第9期9月MICROMOTORSVol.46.No.9Sep.2013收稿日期:2013-08-01作者简介:莫会成(1962),男,研究员级高工,国务院政府津贴专家,长期从事微电机及特种电机的研究与管理。
闵琳(1965),女,研究员级高工,长期从事微电机及特种电机的研究与设计。
王健(1968),男,硕士,高工,研究方向为基于DSP 的交流电机高性能驱动和控制,电机和电力电子系统的电子设计自动化等。
任雷(1964),男,博士,副教授,研究方向为步进电机、无刷直流电机、交流伺服电机理论、设计及控制。
现为西安微电机研究所客座研究员。
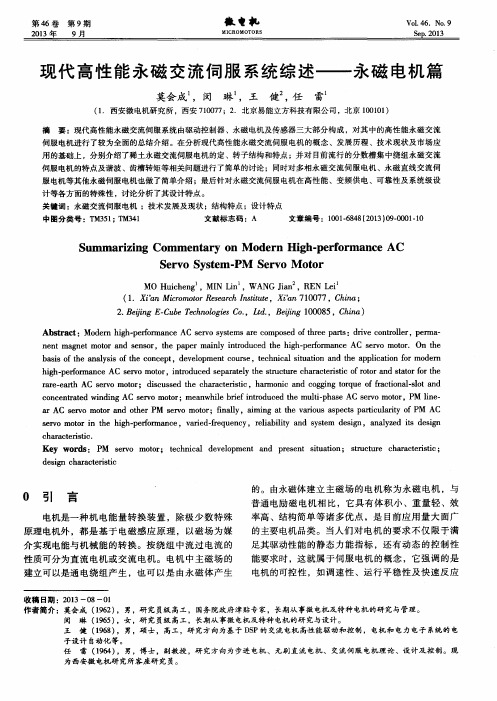
现代高性能永磁交流伺服系统综述———永磁电机篇莫会成1,闵琳1,王健2,任雷1(1.西安微电机研究所,西安710077;2.北京易能立方科技有限公司,北京100101)摘要:现代高性能永磁交流伺服系统由驱动控制器、永磁电机及传感器三大部分构成,对其中的高性能永磁交流伺服电机进行了较为全面的总结介绍。
在分析现代高性能永磁交流伺服电机的概念、发展历程、技术现状及市场应用的基础上,分别介绍了稀土永磁交流伺服电机的定、转子结构和特点;并对目前流行的分数槽集中绕组永磁交流伺服电机的特点及谐波、齿槽转矩等相关问题进行了简单的讨论;同时对多相永磁交流伺服电机、永磁直线交流伺服电机等其他永磁伺服电机也做了简单介绍;最后针对永磁交流伺服电机在高性能、变频供电、可靠性及系统级设计等各方面的特殊性,讨论分析了其设计特点。
关键词:永磁交流伺服电机;技术发展及现状;结构特点;设计特点中图分类号:TM351;TM341文献标志码:A文章编号:1001-6848(2013)09-0001-10Summarizing Commentary on Modern High-performance ACServo System-PM Servo MotorMO Huicheng 1,MIN Lin 1,WANG Jian 2,REN Lei 1(1.Xi'an Micromotor Research Institute ,Xi'an 710077,China ;2.Beijing E-Cube Technologies Co.,Ltd.,Beijing 100085,China )Abstract :Modern high-performance AC servo systems are composed of three parts :drive controller ,perma-nent magnet motor and sensor ,the paper mainly introduced the high-performance AC servo motor.On thebasis of the analysis of the concept ,development course ,technical situation and the application for modern high-performance AC servo motor ,introduced separately the structure characteristic of rotor and stator for the rare-earth AC servo motor ;discussed the characteristic ,harmonic and cogging torque of fractional-slot andconcentrated winding AC servo motor ;meanwhile brief introduced the multi-phase AC servo motor ,PM line-ar AC servo motor and other PM servo motor ;finally ,aiming at the various aspects particularity of PM AC servo motor in the high-performance ,varied-frequency ,reliability and system design ,analyzed its designcharacteristic.Key words :PM servo motor ;technical development and present situation ;structure characteristic ;design characteristic0引言电机是一种机电能量转换装置,除极少数特殊原理电机外,都是基于电磁感应原理,以磁场为媒介实现电能与机械能的转换。
永磁无刷电动机系统发展现状_莫会成
2007年第10期16永磁无刷电动机系统发展现状莫会成 (西安微电机研究所,西安 710077)1 引言永磁无刷电动机系统是以电机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构的电气传动控制系统。
随着电机技术、控制理论、数字脉宽调制技术、新材料技术、微电子技术及现代控制技术的进步,伺服系统经历了从步进伺服到直流伺服,进而到永磁无刷电机伺服系统的发展历程,目前已成为电机控制技术的主流方向。
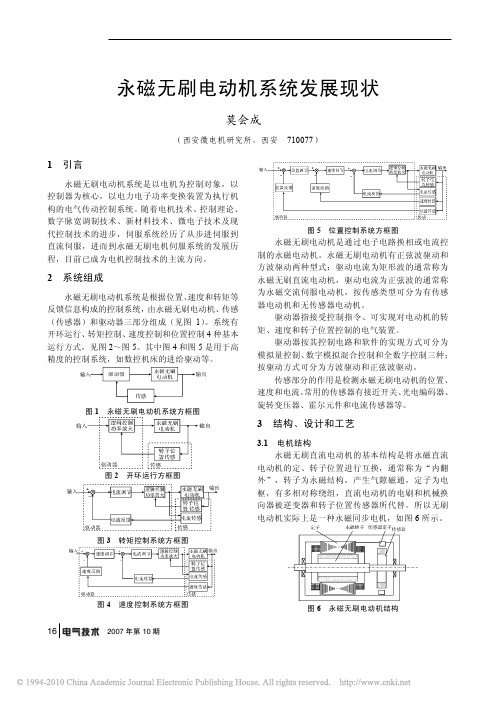
2 系统组成永磁无刷电动机系统是根据位置、速度和转矩等反馈信息构成的控制系统,由永磁无刷电动机、传感(传感器)和驱动器三部分组成(见图1)。
系统有开环运行、转矩控制、速度控制和位置控制4种基本运行方式,见图2~图5。
其中图4和图5是用于高精度的控制系统,如数控机床的进给驱动等。
图1 永磁无刷电动机系统方框图图2 开环运行方框图图3 转矩控制系统方框图图4 速度控制系统方框图图5 位置控制系统方框图永磁无刷电动机是通过电子电路换相或电流控制的永磁电动机。
永磁无刷电动机有正弦波驱动和方波驱动两种型式:驱动电流为矩形波的通常称为永磁无刷直流电动机,驱动电流为正弦波的通常称为永磁交流伺服电动机,按传感类型可分为有传感器电动机和无传感器电动机。
驱动器指接受控制指令、可实现对电动机的转矩、速度和转子位置控制的电气装置。
驱动器按其控制电路和软件的实现方式可分为模拟量控制、数字模拟混合控制和全数字控制三种;按驱动方式可分为方波驱动和正弦波驱动。
传感部分的作用是检测永磁无刷电动机的位置、速度和电流。
常用的传感器有接近开关、光电编码器、旋转变压器、霍尔元件和电流传感器等。
3 结构、设计和工艺3.1 电机结构永磁无刷直流电动机的基本结构是将永磁直流电动机的定、转子位置进行互换,通常称为“内翻外”,转子为永磁结构,产生气隙磁通,定子为电枢,有多相对称绕组,直流电动机的电刷和机械换向器被逆变器和转子位置传感器所代替。
所以无刷电动机实际上是一种永磁同步电机,如图6所示。
交流永磁伺服电机原理 -回复
交流永磁伺服电机原理-回复交流永磁伺服电机是一种采用永磁材料作为转子的交流电机,并结合伺服控制系统实现精确控制的电动机。
它在许多工业和自动化应用中被广泛使用,其性能优越,能够实现高速、高精度和高效率的运动控制。
首先,我们来了解一下交流永磁伺服电机的结构和原理。
该电机由固定子和转子组成。
固定子是由定子绕组和磁场产生器组成,常见的磁场产生器有永磁体和电磁体两种。
而转子则是由永磁材料制成,其与固定子相互转动,产生转矩。
在工作过程中,固定子上的三相绕组通过电流产生一定的磁场,在控制系统的控制下,根据转子的位置和速度变化,控制电流改变工作磁场,从而产生转矩。
电流通常通过变频器来实现,变频器可以根据需要改变电机转速和转矩。
了解了交流永磁伺服电机的基本结构和工作原理后,我们再来探讨一下它的优势和应用方面。
首先,交流永磁伺服电机具有高性能的特点。
由于使用永磁材料作为转子,它具有高磁导率和高能量密度,使得电机的功率密度更高,效率更高。
同时,它的惯性低、加速度快,具有较好的动态特性,能够实现更精确的位置和速度控制。
其次,交流永磁伺服电机具有宽工作范围和高控制精度。
通过伺服控制系统,可以实时监测电机的位置和速度,然后精确调整电流来控制转矩和转速。
这使得电机可以在不同负载下稳定运行,并实现高精度的定位和运动控制。
再次,交流永磁伺服电机具有较好的响应性能。
由于其结构简单、转子惯性低,响应速度较快,使得它适用于需要快速启动和停止的应用场合。
此外,它还具有较好的负载适应性,可以在变负载和冲击负载下有效地改变输出转矩和速度,保持稳定的工作状态。
最后,交流永磁伺服电机在工业自动化领域有广泛的应用。
它可以用于各种机械传动系统,如机床、印刷设备、包装设备、纺织机械等。
同时,它还可以应用于自动化生产线和机器人等高精度运动控制系统中,实现高效、精确的操作。
综上所述,交流永磁伺服电机是一种结合了永磁材料和伺服控制系统的高性能电机。
其优势在于高功率密度、高控制精度、快速响应和广泛的应用范围。
现代高性能永磁交流伺服系统综述——永磁电机篇
2 . B e i j i n g E — C u b e T e c h n o l o g i e s C o . ,L t d . ,B e i i f n g 1 0 0 0 8 5 ,C h i n a )
Ab s t r a c t :Mo d e m h i g h — p e r f o r ma n c e AC s e r v o s y s t e ms a r e c o mp o s e d o f t h r e e p a r t s :d i r v e c o n t r o l l e r ,p e r ma — n e n t ma g n e t mo t o r a n d s e n s o r ,t h e p a p e r ma i n l y i n t r o d u c e d t h e h i g h - p e f r o m a r n c e AC s e r v o mo t o r .On t h e b a s i s o f t h e a n a l y s i s o f t h e c o n c e p t ,d e v e l o p me n t c o u r s e ,t e c h n i c l a s i t u a t i o n nd a t h e a p p l i c a t i o n f o r mo d e m h i g h — p e f r o m a r n c e AC s e r v o mo t o r .i n t r o d u c e d s e p a r a t e l y t h e s t r u c t u r e c h a r a c t e is r t i c o f r o t o r a n d s t a t o r or f t h e r a r e — e a r t h AC s e r v o mo t o r ;d i s c u s s e d he t c h ra a c t e is r t i c,h a r mo n i c a n d c o g g i n g t o r q u e o f f r a c t i o n a l — s l o t a n d c o n c e n t r a t e d w i n d i n g AC s e r v o mo t o r ;me a n w h i l e b ie r f i n t r o d u c e d t h e mu l t i — p h a s e A C s e r v o mo t o r ,P M l i n e - r a AC s e r v o mo t o r a n d o t h e r P M s e r v o mo t o r ;f i n a l l y,a i mi n g a t t h e v a r i o u s a s p e c t s p a r t i c u l a i r t y o f P M AC s e r v o mo t o r i n t h e h i g h — p e f r o m a r n c e,v a i r e d - f r e q u e n c y,r e l i a b i l i t y a n d s y s t e m d e s i g n, a n ly a z e d i t s d e s i n g
交流伺服驱动器转矩控制模式参数说明
交流伺服驱动器转矩控制模式参数说明伺服驱动器是一种用于控制电机运动的设备,可以通过改变其参数来实现不同的控制模式。
其中,转矩控制模式是一种常用的控制模式,实现对电机输出的转矩进行精确控制。
下面是对转矩控制模式常见参数的详细说明。
1. 转矩控制增益(Torque control gain):该参数用于调节控制器对电机输出转矩的响应速度。
较大的增益可以提高控制器的响应速度,但可能会导致系统的稳定性下降。
较小的增益可以提高系统的稳定性,但可能会牺牲响应速度。
2. 转矩限制(Torque limit):该参数用于限制控制器允许的最大输出转矩。
通过调节转矩限制,可以确保系统在安全范围内工作,避免超出电机的承受能力。
3. 反馈滤波器(Feedback filter):该参数用于对反馈信号进行滤波处理,以减小噪声和干扰对控制系统的影响。
较小的滤波器参数可以提高系统的响应速度,但可能会增加噪声和干扰的影响。
较大的滤波器参数可以减小噪声和干扰的影响,但可能会降低响应速度。
4. 前馈增益(Feedforward gain):该参数用于引入前馈控制信号,以提高系统的控制精度和响应速度。
通过调节前馈增益,可以根据系统的需求进行优化。
5. 转矩环(Torque loop)带宽:该参数用于调节转矩环的带宽,即系统对转矩信号响应的频率范围。
较高的带宽可以提高系统的峰值响应速度,但可能会导致系统的稳定性下降。
较低的带宽可以提高系统的稳定性,但可能会降低响应速度。
6. 转矩环(Torque loop)最大误差(Maximum error):该参数用于设置允许的最大控制误差。
当控制误差超过该设定值时,控制器会采取相应的措施进行纠正,以保证系统的控制精度。
除了以上参数,还有一些其他参数也会对转矩控制模式的性能产生影响,如速度限制参数、滞后补偿参数等。
这些参数的设置需要根据具体的应用需求和电机特性进行优化调节,以实现最佳的控制效果。
总之,转矩控制模式的参数设置对于伺服驱动器的性能和稳定性至关重要。
永磁交流伺服电动机

气隙磁场磁极与转子两对磁极间的磁力线如同有弹性的
橡皮筋一样,尽管在负载变化时,气隙磁场磁极与转子磁极
轴线之间的夹角会变大或变小,但只要负载不超过一定限度,
转子就始终跟着气隙旋转磁场以恒定的同步速ns转动,即转
子转速为
n
ns
60 f pn
(,f为定子绕组电源频率;pn为极对数。可见,转子转速
产生(的1)电电势势EσE。. σ。Eσ. 类似于变压器或者异步型交流伺服电动
机中的漏磁电势,可以用漏电抗Xσ上的电压降来表示
E& jX I&a
(9-2)
(2)电势E0。E0是定子绕组切割转子永磁磁场所产生的 电势,即由转子永磁磁场匝链定子绕组的磁通 Φf交变所产 生的电势,在相位上滞后于磁通Φf相位90°,大小为
图9-4 正弦脉宽调制信号
综上所述,永磁交流伺服电动机系统是根据给定的指令, 将电信号转换为转轴的伺服运动。该系统在获得指令后,通 过处理器运行预先编制好的程序,生成所需的脉冲,控制逆 变主电路中电力电子器件的通/断,将电压施加到永磁同步 电动机的定子多相绕组,在气隙中产生旋转磁场。气隙磁场 与转子磁场相互作用,产生电磁转矩。电磁转矩使电动机转 子顺着旋转磁场方向运行,拖动自动控制系统的机构作伺服 运动。
9.2.2 永磁同步电动机的工作原理 永磁交流伺服电动机中的电机在本质上就是一种永磁同
步电动机,其转矩产生和旋转的原理相当简单,下面用一个 简单的两极电动机加以说明。
图9-5中所表示的转子是一个具有两个磁极的永磁转子。 当同步电动机的定子对称绕组通入对称的多相交流电后,会 在电机气隙中出现一个由定子电流和转子永磁体合成产生的 两极旋转磁场,这个旋转磁场在图中用另一对旋转磁极来等 效,其转速取决于电源频率。
永磁交流伺服电动机铁耗系数的研究

永磁交流伺服电动机铁耗系数的研究
随着永磁交流伺服电动机在工业领域的广泛应用,其高效、稳定、精准等特点受到了越来越多用户的青睐。
然而,由于电磁场的存在,电动机工作时会存在一定的铁耗。
铁耗系数是指单位时间内铁心中消耗的功率与电动机输出功率的比值。
其大小与电动机的设计、工况、材料等有关。
为研究永磁交流伺服电动机的铁耗系数,有以下几个方面需要考虑:
一是电动机的设计。
在设计电动机时,应充分考虑铁耗的影响,选择具有较小铁耗系数的材料和结构,精确计算电磁场分布和铁耗大小,以提高电动机的效率和寿命。
二是电动机的工况。
电动机在不同负载工况下的铁耗系数也是不同的,因此在实际应用时需根据具体情况进行调整和优化。
三是电动机材料的性能。
电动机中的铁心材料对铁耗系数有着重要影响。
为减少铁耗,应选择具有较低导磁率和较高矫顽力的材料,如硅钢片。
综上所述,研究永磁交流伺服电动机的铁耗系数是必要的,对提高电动机的效率和寿命具有重要意义。
永磁交流伺服电动机的参数分析_莫会成

Ja = La ia+ Mab ib+ Mac i c+ Jf co sθ Jb = Mba ia+ Lb ib+ Mbc ic+ Jf cos(θ - 2 π) 3 ( 10) Jc = Mca i a+ Mcb ib+ L c ic+ Jf cos(θ + 2 π) 3
式中 , θ 为转子 d 轴与定子 a 相绕组轴线之间的夹 角 ,Jf 为定子电枢绕组最大可能匝链的转子每极永 磁磁链。 同样无论是自感还是互感都由这两部分组 成 , 即与定子漏磁路相关的漏电感和与气隙及定转 子主磁路相关的主电感组成。 由于电机等效气隙不 再均匀 , 存在 dq 轴效应。对定子某一相绕组来说 , 当 转子直轴与该相绕组轴重合时 , 该相绕组面对的是 直轴气隙 ; 而当交轴与该相绕组的轴线一致时 , 面对 的是交轴气隙 , 因为直轴与交轴的气隙长度总是处 于电动机气隙的两个极端位置 , 也就是说这两个位 置面对的最大和最小两个磁导 , 可见气隙磁导分布 按照转子位置角的偶次谐波变化。忽略高次谐波 , 并 经推导后可得: La = Lσ + L 0+ L2 co s2 θ 2 Lb= Lσ + L0+ L 2 cos2(θ - π) 3 2 Lc = Lσ + L 0+ L2 cos2(θ + π) 3
ia ea d ib + eb ( 4) dt ic ec 忽略凸极效应时 , 电机的电感和互感可表示为 : L = Lσ + L0 M= Mσ + L 0 co s( 2 π 1 ) = Mσ- Lσ 3 2 ( 5)
3 L s = Lσ- Mσ + 2 L0 上式中 , Lσ 和 Mσ 为电机绕组的漏电感和漏互感 , 它 主要与电机定子冲片的槽形尺寸和绕组端部尺寸等 漏磁导有关。 一般相对而言所占比重较小。 L 0 为电
交流伺服驱动器转矩控制模式参数说明(精)
围属性
参 数 说 明
26F12第一速度环比例增益
Kps
0~3000
调整
参数
速度环调节器第一比例增益参数:
u数值越大,增益越高,速度响应越快。
u参数值的设定需根据负载情况确定,一般,负载惯量越大,设定值越大!
u建议在系统不出现振荡和允许噪音的情况下,参数的设定值尽可能大!
27F13第一速度环积分增益
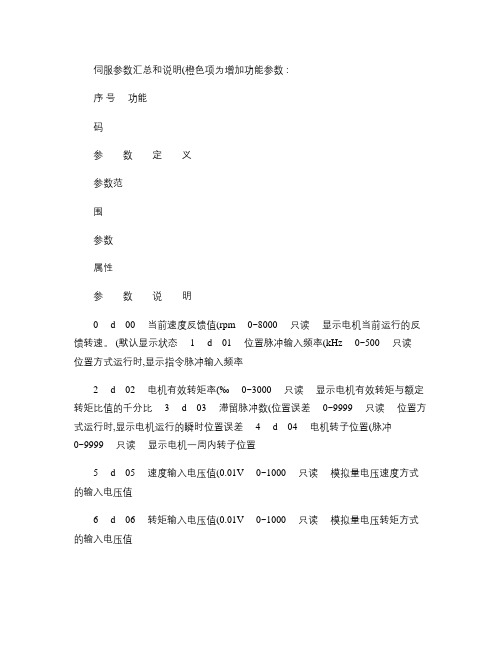
伺服参数汇总和说明(橙色项为增加功能参数:
序号功能
码
参 数 定 义
参数范
围
参数
属性
参 数 说 明
0d00当前速度反馈值(rpm0~8000只读显示电机当前运行的反馈转速。(默认显示状态1d01位置脉冲输入频率(kHz0~500只读位置方式运行时,显示指令脉冲输入频率
2d02电机有效转矩率(‰0~3000只读显示电机有效转矩与额定转矩比值的千分比3d03滞留脉冲数(位置误差0~9999只读位置方式运行时,显示电机运行的瞬时位置误差4d04电机转子位置(脉冲0~9999只读显示电机一周内转子位置
5d05速度输入电压值(0.01V0~1000只读模拟量电压速度方式的输入电压值
6d06转矩输入电压值(0.01V0~1000只读模拟量电压转矩方式的输入电压值
7d07当前速度给定值(rpm0~8000只读显示电机当前的速度给定值
8
*
F00
控制模式0~4
调整
参数
0-外部速度给定方式,根据端口CN2-16、17输入的外部模拟量给定-10V~+10V信号确定电机运转速度大小和方向;1-内部速度给定方式,根据参数F33~F3a的设置和CN2-9,CN 2-25输入口状态确定电机运转速度大小和方向;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其中 L 0 为电感的平均值 , L2 为二次谐波幅值 , 且当 λ d> λ q 时 , L 2 > 0; 当 λ d <λ q 时 , L 2 < 0; 当 λ d= λ q , L 2= 0这相当于上节的情况 。 对互感 , 经推导后可得 : 1 2 L0+ L 2 cos( 2 θ - π) 2 3 ( 12)
Ja = La ia+ Mab ib+ Mac i c+ Jf co sθ Jb = Mba ia+ Lb ib+ Mbc ic+ Jf cos(θ - 2 π) 3 ( 10) Jc = Mca i a+ Mcb ib+ L c ic+ Jf cos(θ + 2 π) 3
式中 , θ 为转子 d 轴与定子 a 相绕组轴线之间的夹 角 ,Jf 为定子电枢绕组最大可能匝链的转子每极永 磁磁链。 同样无论是自感还是互感都由这两部分组 成 , 即与定子漏磁路相关的漏电感和与气隙及定转 子主磁路相关的主电感组成。 由于电机等效气隙不 再均匀 , 存在 dq 轴效应。对定子某一相绕组来说 , 当 转子直轴与该相绕组轴重合时 , 该相绕组面对的是 直轴气隙 ; 而当交轴与该相绕组的轴线一致时 , 面对 的是交轴气隙 , 因为直轴与交轴的气隙长度总是处 于电动机气隙的两个极端位置 , 也就是说这两个位 置面对的最大和最小两个磁导 , 可见气隙磁导分布 按照转子位置角的偶次谐波变化。忽略高次谐波 , 并 经推导后可得: La = Lσ + L 0+ L2 co s2 θ 2 Lb= Lσ + L0+ L 2 cos2(θ - π) 3 2 Lc = Lσ + L 0+ L2 cos2(θ + π) 3
1 结构特点
永磁交流伺服电动机有多种不同的结构形式: 如轴向磁场和径向磁场结构、 内转子和外转子结构 等 , 但是最典型的最常用的还是径向磁场的内转子 结构形式。
收稿日期 : 2005- 05- 11
微电机 2005年 第 38 卷 第 3 期 (总第 144期 )
可采用聚磁结构提高气隙的有效磁通 。
ia ea d ib + eb ( 4) dt ic ec 忽略凸极效应时 , 电机的电感和互感可表示为 : L = Lσ + L0 M= Mσ + L 0 co s( 2 π 1 ) = Mσ- Lσ 3 2 ( 5)
3 L s = Lσ- Mσ + 2 L0 上式中 , Lσ 和 Mσ 为电机绕组的漏电感和漏互感 , 它 主要与电机定子冲片的槽形尺寸和绕组端部尺寸等 漏磁导有关。 一般相对而言所占比重较小。 L 0 为电
0 引 言
永磁交流伺服电动机发出非常迅速 , 无论是从 功率及转矩所覆盖的范围 , 使用领域 , 还是从性能和 控制精度方面来看 , 近年来都取得了长远的进步 。 根 据其气隙磁场感应的反电势波形和驱动电流波形的 不同 , 可将此类电动机分为永磁无刷伺服电动机和 永磁同步伺服电动机。前者驱动电流的方波 、后者驱 动电流为正弦波。无论是哪种电动机 , 其参数对电机 性能 , 伺服系统的设计和控制算法的生成都是至关 重要的 。 本文力求从永磁交流伺服电动机的几种典 型结构出发 , 通过模型的建立和恒功率坐标变换的 运用 , 分析和归纳方波驱动和正弦波驱动时电动机 各参数之间的相互关系 , 得出了一些新的思路 , 并针 对工作实际 , 提出了较为实用的简易则试方法。
图 1 凸装式永磁转子结构
图 2 嵌入式和内置式永磁转子结构
无论是嵌入式还是内置式转子结构 , 由于转子 外圆面向定子电抠的气隙不再均匀 , 故而产生凸极 效应。 如图所示这时 d 轴和 q 轴磁路的磁导不再相 等 ,λ d≠λ q。 很显然对图 2 a)和图 2 b) , 由于 d 轴磁路 要穿过永磁体才能形成回路 , d 轴的等效气隙要大 于 q轴的等效气隙 , 即有 λ d <λ q ; 而对图 2 c)则正好 相反 , 这时有 λ d> λ q。 对于需要进行恒功率弱磁控 制 , 扩大速度运行范围 , 提高最高工作转速时 , 采用 此种结构较为适宜 。
DOI : 10. 15934 /j . cnki . m icrom otors . 2005. 03. 001 永磁交流伺服电动机的参数分析 莫会成
设计与研究· DESIGN & RESEARCH
永磁交流伺服电动机的参数分析
莫会成
(西安微电机研究所 ,西安 710077)
摘 要 : 从永磁交流伺服电动机的基本结构出发 , 通过数学模型的建 立和运用坐标变换 ,对方波和正 弦波电流驱动 两类永磁伺服电动机的参数及其相互关系进 行了分析和阐述 ,并提出了新的实用的测试方法 。 关键词 : 永磁 ; 交流伺服电动机 ; 参数 ; 分析 中图分类号 : T M 383. 4 文献标识码 : A 文章编号 : 1001- 6848( 2005) 03- 0003- 04
一般在 研究永 磁同步 伺服 电动 机时 , 常采 用 dq 0 坐标系 统。 对 式 ( 9) ~ 式 ( 12) 进 行 Clarke 和 Park 两次变换 , 经整理后 , 可得 dqo 坐标系下的电 感参数为 : ( 9) 3 Ld = Lσ- Mσ + 2 ( Lo+ L2 ) 3 Lq= Lσ - Mσ + ( Lo - L2 ) 2 ( 13)
Parameter Analysis on Permanent - Magnet AC Servomotors MO Hui- cheng
( Xi 'a n Micro mo to r s Resea rch Institute, Xi 'an 710077, China) Abstract : T he paper pro ceeds fro m funda mental str uc tur e of Pe rmanent M ag net AC servo mo tor s, thro ugh establishing ma thematical mo del a nd ex er ting tr ansfo r ma tio n of coo rdinates, analy ses and ex pa tiates square wav e and sine w av e cur rent driv e pa rameter and co r rela tivity of PM serv o moto rs, and put fo rw ard new applied test method . Key words : Per manent- mag net; AC Se rv o mo tor; Peramet er; a naly se
( 7)
Mab= Mba = Mσ-
( 8)
Mbc = Mcb = Mσ - 1 L 0+ L2 cos2 θ 2 Mca = Mac = Mσ 1 2 L 0+ L2 co s( 2 θ + π) 2 3
3 永磁同步伺服电动机的参数分析
对三相永磁同步伺服电动机 , 其电压方程为 : d Ja U a = ia rs+ dt d Jb U b= ib rs+ dt dJc U c = ic rs+ dt
一般而言 , 永磁交流伺服电动机上分布三相或 多组对称绕组。 绕组结构与一般同步或异步电动机 相同 , 转子上装有产生永磁激磁磁场的高性能稀土 永磁材料 。 不同转子永磁的安装方式将对电机磁路 产生不同的影响 , 从而改变电机的参数 。 图 1 为凸装式转子永磁体的几种几何形状。 图 1 a)为圆筒型整体结构 , 磁钢宽度与极距相等 , 忽略 定子开槽和边缘效应时 , 气隙磁场为矩形波 , 当电机 极对数较多 ,极弧较小时 , 每个磁极常采用一块永磁 体 ; 当电机直径较大 , 而极数相对较少时 , 永磁磁极 采用多块磁钢拼接而成 。 图 1 b)和图 1 c)分别为瓦 片型和扇状型 , 永磁体厚度基本一致。 极弧系数小于 1, 气隙中磁场近似梯形波 。 这种转子结构的伺服电 动机磁路结构简单。 由于稀土永磁材料的相对磁导 率μ r≈ 1, 故而电机的径向等效气隙基本相同 , 电机 的交 、直轴磁导也基本相等 , λ d≈λ q。 一般永磁无刷 伺服电动机常采用这种结构 , 因为这种结构的永磁 磁极在定子绕组中所感应的反电势为梯形波 , 在方 波电流驱动时 , 能产生较少的力矩波动 。 图 2 为嵌入式和内置式转子永磁结构图 。 其中 图 2 a)为嵌入式 , 图 2 b)为内置式。内置式转子结构 转子整体强度较好 , 高速时无需对转子进行重新加 固 ,且能根据需要设计成不同的气隙磁场形式 , 甚至 — 3—
2 永磁无刷伺服电动机参数分析
对永磁无刷伺服电动机 , 由于电机的激磁磁场 和反电势及电抠电流波形均非正弦波 , 因而不需进 行坐标变换 , 直接利用电动机的三相变量来建立数 学模型较为方便 , 也可获得较准确的结果。 其定子三相绕组的电压方程为: Ua Ub = Uc La Mba Mca — 4— rs 0 Mab Lb Mcb 0 0 Mac Mbc Lc 0 0 rs ia ib + ic ia ib + ic ea eb ec ( 1) d dt 0 rs
式中 , La、 L b、 Lc 为三相绕组的自感 ,而 Mab为 B 相绕
永磁交流伺服电动机的参数分析 莫会成
机绕组的主电感 , 它与电机气隙大小 , 定转子主磁路 密切相关 ,在忽略漏感时: 1 1 L= - Ls ( 6) 2 3 这是一个表明电机绕组磁链关系的简洁关系式 , 对 M= 参数的理解很有帮助。 在工程实践中 , 往往要对电机的参数进行现场 测量 , 而一般情况下 , 为 了安全起见在绕组采用 Y 联接时是不引出中线的 。 这时可采用图 3 所示的方 式进行简易测量。