μCOS-II嵌入式操作系统在ARM系统中移植与实现
基于ARM的实时操作系统μC/OS-Ⅱ的内核移植

信息技术
基于 A M的实时操作系统 t /S I的内核移植 R x O —I C
薛 鹏 李 广 林 赵 敏
ห้องสมุดไป่ตู้( 武警 工程 学 院 研 究 生 大队 , 西 陕
t ee us n dca IT U/ y df ni e hr N 8 ; 8位 无 符 号 p g *
整数 , tp df i e hr N 8; 8 yee g dc a T S * 位有符号整数 sn I /
绍, 并对代码移植 的正确性进行验证 。 } / 2t / S I CO —l操作 系统简介 x  ̄ /S CO 一Ⅱ是一个著名 的源代码开放 的嵌入 t e e u s n dso T 6 ; 1 有 符 y df ni e hr I 1U/ 6位 p g tN * 式 实 时 操 作 系 统 (T ) 由美 国人 Ja . 号 整 数 / R OS , enJ L b s 编写出来 。 ̄ / S I 作” i ocn ar s oe CO — 1 读 mc o— r tp dfs n dsotIT1S * 6位 无 符 号 ye e i e h r N 6 ; 1 g / t l rO ”意为” r l S2 , oe 微控制 器操作 系统版 本 2 。 整 数 十 ” / I / —l结构小巧 , x OS I C 适合小 型控 制系统, 具有 执 t e e nind l g IT 2 /3 y dfu s e o N 3U; 2位 无 符 p g n * 行效率高 , 占用空间小 , 时性 能优 良和可扩展 号整数 / 实 性能强等特点 , 具有 可剥夺实 时内核 , 提供 了实 t e e g e n T 2 ; 3 y df i dl gI 3S/ 2位有符号整 p s n o N
北航ARM9实验报告:实验3uCOS-II实验
北航ARM9实验报告:实验3uCOS-II实验北航 ARM9 实验报告:实验 3uCOSII 实验一、实验目的本次实验的主要目的是深入了解和掌握 uCOSII 实时操作系统在ARM9 平台上的移植和应用。
通过实际操作,熟悉 uCOSII 的任务管理、内存管理、中断处理等核心机制,提高对实时操作系统的理解和应用能力,为后续的嵌入式系统开发打下坚实的基础。
二、实验环境1、硬件环境:ARM9 开发板、PC 机。
2、软件环境:Keil MDK 集成开发环境、uCOSII 源代码。
三、实验原理uCOSII 是一个可裁剪、可剥夺型的多任务实时内核,具有执行效率高、占用空间小、实时性能优良和可扩展性强等特点。
其基本原理包括任务管理、任务调度、时间管理、内存管理和中断管理等。
任务管理:uCOSII 中的任务是一个独立的执行流,每个任务都有自己的堆栈空间和任务控制块(TCB)。
任务可以处于就绪、运行、等待、挂起等状态。
任务调度:采用基于优先级的抢占式调度算法,始终让优先级最高的就绪任务运行。
时间管理:通过系统时钟节拍来实现任务的延时和定时功能。
内存管理:提供了简单的内存分区管理和内存块管理机制。
中断管理:支持中断嵌套,在中断服务程序中可以进行任务切换。
四、实验步骤1、建立工程在 Keil MDK 中创建一个新的工程,选择对应的 ARM9 芯片型号,并配置相关的编译选项。
2、导入 uCOSII 源代码将 uCOSII 的源代码导入到工程中,并对相关的文件进行配置,如设置任务堆栈大小、系统时钟节拍频率等。
3、编写任务函数根据实验要求,编写多个任务函数,每个任务实现不同的功能。
4、创建任务在主函数中使用 uCOSII 提供的 API 函数创建任务,并设置任务的优先级。
5、启动操作系统调用 uCOSII 的启动函数,使操作系统开始运行,进行任务调度。
6、调试与测试通过单步调试、查看变量值和输出信息等方式,对系统的运行情况进行调试和测试,确保任务的执行符合预期。
五、ucos-II的移植-智能嵌入技术开发与实践-佟国香-清华大学出版社
11
Intel/AMD 80186 Motorola 68HC11
\SOFTWARE\uCOS-II\Ix86S \OS_CPU.H \OS_CPU_A.ASM \OS_CPU_C.C \SOFTWARE\uCOS-II\Ix86L \OS_CPU.H \OS_CPU_A.ASM \OS_CPU_C.C \SOFTWARE\uCOS-II\68HC11 \OS_CPU.H \OS_CPU_A.ASM \OS_CPU_C.C
➢ uC/OS-II的全部源代码量大约是6000-7000行,一共有15 个文件。将 uC/OS-II 移植到ARM处理器上,需要完成的工 作也非常简单,只需要修改三个和ARM体系结构相关的文件 ,代码量大约是500行。
14
移植工作
如果处理器和编译器满足了μC/OS-Ⅱ的要求,并 且已经有了必要工具。移植工作包括以下几个内容: (1)用#define设置一些常量的值(OS_CPU.H) (2)声明10个数据类型(OS_CPU.H) (3)用#define声明三个宏(OS_CPU.H) (4)用C语言编写六个简单的函数(OS_CPU_C.C) (5)编写四个汇编语言函数(OS_CPU_A.ASM)
7
处理器支持硬件堆栈
COS-II进行任务调度的时候,会把当前任 务的CPU寄存器存放到此任务的堆栈中,然后, 再从另一个任务的堆栈中恢复原来的工作寄存器 ,继续运行另一个任务。所以,寄存器的入栈和 出栈是COS-II多任务调度的基础。
处理器中有专门的指令处理堆栈,可以灵活 的使用堆栈。
μCOS-II-下-LwIP-协议栈的移植和测试
1、引言为了实现嵌入式系统终端连入互联网,而有必要为其引入了网络功能。
μC/OS II 是一个源代码开放的实时操作系统,但是它只是一个实时的任务调度及通信内核,并没有集成TCP/IP 通信协议,为了实现网络功能,需要在μC/OS II 移植一个轻量级的TCP/IP 通信协议LwIP。
本文主要论述μC/OS II 下通信协议LwIP 的移植以及测试。
2、LwIP 简介LwIP ( light weight IP)是瑞士计算机科学院的Adam Dunkels 等开发的一套开放TCP/IP 协议栈源代码。
LwIP 既可以移植到操作系统上,又可以在无操作系统的情况下独立运行。
LwIP 实现的重点是在保持TCP/IP 协议主要功能的基础上减少对RAM 的占用,这使LwIP 适合在低端嵌入式系统中使用。
其主要特点如下:(1)支持多网络接口下IP 转发;(2)支持ICMP 协议;(3)包括试验性扩展的UDP;(4)包括简单的拥塞控制,RTT 估算和快速恢复和快速转发的TCP;(5)提供专门的内部回调接口(Raw API)用于提高应用程序性能;(6)可选择的Berkeley 接口API;3、LwIP 协议栈移植到μC/OS II 操作系统的具体实现3.1 嵌入式系统结构和LwIP 接口整个嵌入式系统的结构如图 1 所示,由ARM 微处理器、网卡、网络设备驱动、μC/OSII 操作系统、LwIP 协议栈和应用程序组成。
图 1 嵌入式系统结构图LwIP 在设计时为了适应不同的操作系统,并没有在代码中使用和某个特定的操作系统相关的系统调用和数据结构,而是在LwIP 和操作系统之间提供了一个接口层(sys_arch interface),该接口主要实现的功能包括数据类型的定义、存储模式的选择、任务间的同步、时间和内存的管理等。
因此,完成LwIP 在μC/OS II 移植,我们就是要通过修改这个接口层来实现。
同时,还要根据自己所要实现的具体目的,可以对LwIP 协议栈进行一定的裁减。
μCOS-II在ARM920T上的移植

SIC &T H LG CNE E N OY E C0 .
匝圆
l COS I AR 2 T上 的 移 植 a -I 在 M9 0
吴 迪 Biblioteka ( 州大学 电子 信息 学院 江 苏苏 州 2 0 0) 苏 1 0 5
摘 要 : c o —I是 一 个 完 整 的 固 化 剪 裁 的抢 占 式 实 时 多任 务 内核 。 今 , 8 到 6 位 ,“c o —I 已 经 在 超 过 4 种 不 同 架 构 的 /s I 至 从 位 4 /s I 0 微 处 理 器 上 运 行 。 界 上 已 有 数 千 人 在 各 个 领 域 中 使 用 c os I 这 些 领 域 包 括 航 空 业 , 端 音 响 医 疗 器 械 , 子 乐 器 , 动 机 控 世 / -I , 高 电 发 制 、 络 设 备 、 速 公 路 电话 系 统 以 及 工 业 机 器 人 等 。 文 介 绍 了该 操 作 系统 在 AR 0 CP 网 高 本 M9 T U ̄ 的 移 植 。 2 关 键 词 : c o -I / s I 移 植 AR M 中 图 分 类 号 : P 1 T 3 6 文 献标 识 码 : A 文 章 编 号 : 7 -3 9 ( 0 0 1 () 0 9 2 I 2 7 l2 1 ) c一0 0 —0 6 0
对 于 PC机 , 开 机 后 的初 始化 处 理 器 其 配 置 、 件 初始 化 等操 作是 由BI 硬 OS( sc Ba i I p t / t u S se 完 成 的 , 对干嵌 nu Ou p t y tm) 但
系统 。 后 由 操作 系统 接 管 整 个 系 统 , 行 然 进 进程管理、 内存 管 理 、 盘 管 理 和 各 个外 设 磁
嵌入式操作系统μCoS-Ⅱ的移植

2 I S Ⅱ的 移 植 分 析  ̄ CO -
2. 移 植 概 述 1
Байду номын сангаас
1 C 一 oS Ⅱ简 介
/ O 一  ̄ S Ⅱ是 一 个 基 于 优 先 级 的抢 占式 实 时 多 C
所谓 移植 , 就是 使一 个实 时 内核能 在其 他 的微 处理 器或 微控 制器 上运 行 。为 了方便 移植 , 大部 分
任务 操作 系统 , 它包含 了实时 内核 、 任务 管理 、 间 时
C S Ⅱ是 用 C语 言编写 的 , O一 但与 硬 件 有关 的 代码
仍需要 用 汇 便 语 言 编 写 。t O — 在 设 计 之 初 已  ̄ SI C I
管理 、 信号 量 、 内存管 理等 , 用 于 8位 1 可 6位 和 3 2
维普资讯
第2 卷 第1 3 期
金 陵 科 技 学 院 学 报
Vo12 N o. . 3. 1
27 月 0 年3 0
JU N LO N IGIS I E O R A F LN T1 T 里 J I N =
Q
Ma.2 0 r ,0 7
随着 现代化 技术 的发 展 , 入式 系统 的应用 范 嵌 围越来 越广 泛 , 于嵌 入式 技术 的产 品从尖 端 复杂 基
自己 的 需 要 对 C S Ⅱ进 行 裁 剪 。t O —I 代 O  ̄ S I源 C
码 公开 , 部分 是 用 A IC编 写 的 , 有 与 处 理 大 NS 只
T ePo tn fEmb d e e ai gS se p h ri go e d d Op r tn y tm  ̄ COS Ⅱ -
GAO iyig Cu — n
( hnd n e i e nl y C egu 109 C i ) C egu i rt o T c o g, hnd 05 , h a U v sy f h o 6 n
基于STM32单片机的uCOS-II操作系统移植

第6期2020年12月机电元件ELECTROMECHANICALCOMPONENTSVol 40No 6Dec 2020收稿日期:2020-10-20基于STM32单片机的uC/OS-II操作系统移植张中前(贵州航天电器股份有限公司,贵州贵阳,550009) 摘要:网络技术和信息技术的发展,嵌入式系统应用越来越普及,嵌入式设备的应用也越来越多。
uC/OS-II广泛应用于路由器、飞行器及工业控制等。
uC/OS-II操作系统执行效率高,占用存储空间少,具有实时性及可扩展性等优点,在小型嵌入式设备中具有广泛应用。
本文介绍了基于ARMCORTEXM3系列单片机上的uC/OS-II移植,对电子控制组件的设计具有参考作用。
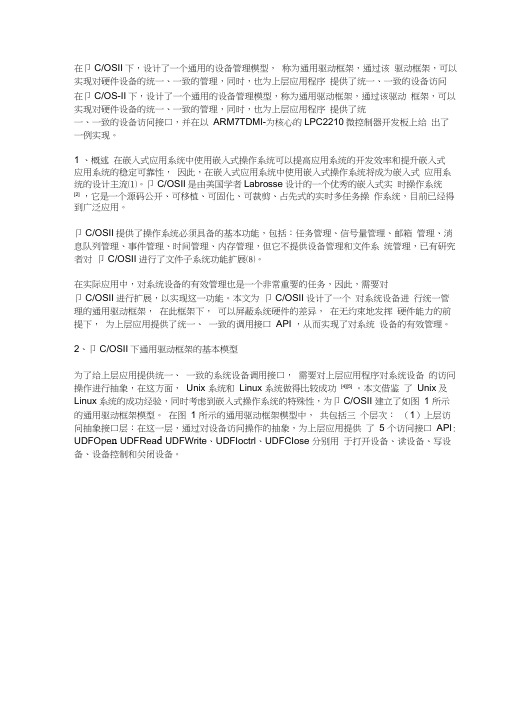
关键词:实时操作系统;uC/OS-II;内存管理;任务管理;STM32;移植Doi:10.3969/j.issn.1000-6133.2020.06.015中图分类号:TN784 文献标识码:A 文章编号:1000-6133(2020)06-0057-051 引言操作系统是裸机的第一层软件,操作系统直接运行在硬件上,上层软件通过提供应用程序接口(API函数),实现对底层硬件的访问,同时,通过操作系统实现对多个上层应用软件(任务)管理,实现对硬件CPU管理、存储管理、I/O接口管理及文件管理,如图1所示。
图1 操作系统功能组成示意图 STM32系列单片机以其优良的价格,大容量的FLASH及RAM存储空间,极易用于较为复杂的控制系统;在STM32单片机上进行uC/OS-II实时操作系统的移植,提高了产品的设计灵活性,实现较为复杂的系统功能;通过将开源的uC/OS-II移植在STM32单片机上,以其较为低廉的硬件成本获得较高的使用性能,具有良好的应用前景。
2 uC/OS-II操作系统2.1 uC/OS-II操作系统的基本特征uC/OS-II是一个完整的、可移植、可固化、可剪裁的基于优先级调度的抢占式实时多任务操作系统;它能够在外界事件或数据产生时,能够接收图2 uC/OS-II文件结构示意图并以足够快的速度响应,其处理的结果又能够在规定的时间内输出,并控制所有实时任务协调、一致运行。
《μCOS嵌入式操作系统》实验指导书
μCOS嵌入式操作系统实验指导书说明《嵌入式系统及应用实验指导书》包含:嵌入式开发板的硬件结构与u-boot基本命令、uClinux的多任务机制及其编程、uClinux的内存管理机制及其编程、在51单片机上移植μC/OS-II和在ARM7单片机上移植μC/OS-II 实验指导,适合电子与信息类专业的学生学习使用。
目录实验一嵌入式开发板的硬件结构与U-BOOT基本命令 (1)实验二UCLINUX的多任务机制及其编程 (6)实验三UCLINUX的内存管理机制及其编程 (9)实验四在51单片机上移植ΜC/OS-II (17)实验五在ARM7单片机上移植ΜC/OS-II (21)实验一嵌入式开发板的硬件结构与u-boot基本命令一、实验目的1、能够使用Embest IDE for ARM集成开发环境及ARM软件模拟器;2、通过实验掌握u-boot基本命令。
二、实验原理Bootloader代码是器件复位后进入操作系统前执行的一段代码,通过该代码初始化处理器各寄存器和片上外设,建立存储器映射图以及初始化堆栈,从而为操作系统提供基本的运行环境。
由于Bootloader与CPU和开发板配置有关,不可能有通用的Bootloader,因此需要根据具体情况进行移植。
嵌入式系统U-boot是当前流行、功能强大的Bootloader。
U-Boot用于多种嵌入式CPU的Bootloader程序,U-Boot支持ARM、PowerPC等多种架构的处理器,也支持Linux、NetBSD和Vx—Works等操作系统。
这里采用U—Boot 的版本为U-boot-1.1.6。
(1)U-Boot目录结构U-Boot目录结构如下:board是一些与现有开发板有关的文件,比如makefile和u-boot.1ds等都与具体开发板的硬件和地址分配有关;common 是与体系结构无关的文件,可实现各种命令的C文件;cpu是CPU相关文件,其子目录都是以U-boot支持的CPU命名,比如子目录arm920t,mips,s3e44bO 和nios等,每个特定的子目录都包括cpu.c,interrupt.C和start.s;doc是说明文档;drivers是通用设备驱动程序,比如:各种网卡、支持CFI的Flash 和USB总线等;fs是支持文件系统的文件,U—Boot可支持cramfs,fat,fdos,jffs2等文件;net是与网络有关的代码,比如:BOOTP协议、TFTP协议和NFS文件系统的实现;lib_arm是与ARM体系结构相关的代码;tools 是创建S-Record的格式文件和U-Boot images的工具。
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第一部分

目录学习情境一、嵌入式系统概述及集成环境的搭建与使用 (1)一、知识要点:嵌入式系统概述 (1)1.嵌入式系统基本概念 (1)2.嵌入式系统的特点 (2)3.嵌入式系统的应用领域 (3)(1)工业控制领域 (3)(2)信息家电 (4)(3)交通管理、环境监测、医疗仪器 (4)(4)嵌入式Internet应用 (4)(5)军事国防领域 (5)4.嵌入式系统的发展 (6)5.嵌入式系统的开发流程 (7)6.嵌入式系统的调试 (10)(1)在线仿真器(ICE)方式 (10)(2)在线调试器(ICD)方式 (11)(3)监控器方式 (11)7.基于μCOS-Ⅱ的嵌入式系统软件体系结构 (11)二、技能要求:嵌入式系统交叉开发环境的搭建 (2)1.交叉开发环境 (2)2.使用集成开发环境进行软件开发的流程 (2)3.ARM ADS集成开发工具及其组成 (3)(1)ADS集成开发工具 (3)(2)ADS集成开发工具的组成 (3)案例1.ADS 1.2的安装 (4)案例2.ADS集成开发环境的使用 (5)(1)新建工程 (5)(2)配置新建工程 (6)(3)添加文件,完成编译与链接,并生成目标文件.......... 错误!未定义书签。
案例3.其它工具的使用 .............................................................................. 错误!未定义书签。
(1)仿真器的连接与使用................................ 错误!未定义书签。
(2)超级终端的设置及映像下载.......................... 错误!未定义书签。
(3)Source Insight代码编辑器的使用.................... 错误!未定义书签。
学习情境二、嵌入式平台的接口驱动................................................................... 错误!未定义书签。
uCOS-II在51单片机上的移植

功能
处理临界段方式选择 堆栈增长方向 进入临界区 退出临界区 就绪态最高优先级任务运行 任务级任务切换 中断级任务切换 时钟节拍 任务堆栈初始化
表7-1 需要修改的关键函数和宏定义
6
7.1.6 INCLUDES.H
* * * * * * 文件名 : INCLUDES.H * 作者 : Jean J. Labrosse ****************************************************************************/
9
7.1.8 OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()
临界代码的概念。 uC/OS-II定义的两个宏。
{ OS_ENTER_CRITICAL(); /* µC/OS-II 临界代码段 */ OS_EXIT_CRITICAL(); }
#define OS_ENTER_CRITICAL() EA=0 #define OS_EXIT_CRITICAL() EA=1 #define OS_ENTER_CRITICAL() \
例如,任务A和任务B都要调用函数Swap(), 而该函数又使用了全局变量temp。于是当任 务A调用Swap()函数期间,系统发生了任务 切换而使任务B也调用了Swap(),那么任务B 将要改变全局变量temp的值,使任务A传递 给全局变量temp的值丢失而出现错误。
一般来说,一个可重入函数应该在函数中只 使用局部变量,因为函数的局部变量存储在 任务的堆栈中,所以可保证不同的任务在调 用同一个函数时不会发生冲突。
/ ******************* 与处理器相关的代码 ********************/ #define OS_CRITICAL_METHOD ?? #if OS_CRITICAL_METHOD = = 1 #define OS_ENTER_CRITICAL() ?? #define OS_EXIT_CRITICAL() ?? #endif
μCos-Ⅱ在嵌入式通信信号源中的应用
cn grt no o f u ai fgCo —I a l a h e lzto fmut—a k p o r m d t y c r nz t n a d c mmu c t n b t e aks. i o sI , swel s te raiain o l ts r ga a he sn h o iai n o i n o niai ewe n ts o
/ o— 的系 统 开 销 、 植 和 配 置 、 任 务 编 程 以及 任 务 间 同步 、 信 的 实 现 方 法 。  ̄ sI C I 移 多 通 关 键 词 / o— ; 务 间 同 步 和 通 信 ; 信 信 号 源 ; D  ̄ sI 任 C I 通 DS
中图 分 类 号 T 91 N1 文 献 标 识 码 A
Ke r s y wo d / sI ; n h o z t n a d o  ̄ Co —I Sy c rniai n C mmu iain bewe n T s ; o o nc t t e a ks C mmu iain S g a o r e DDS o nct i l S uc ; o n
时操 作 系 统 C s I将 应 用 程 序 按 功 能 划 分 为几 个 核 心任 务 , o- , I 由实 时 内 核进 行 调 度 , 现 了 多 任 务 的 并 行 执 行 , 高 了 嵌 入 式 实 提
系统开发 的效率 、 实时性 和可靠性。通过以实时嵌入式操作系统 / o— 为软件平 台的嵌 入式通信信号源 的系统 设计 ,  ̄ sI C I 介绍 了
维普资讯
专题 技 术 与工 程 应 用
l o. 在 嵌 入 式 通 信 信 号 源 中的 应 用 t sI C I
李
北航ARM9嵌入式系统实验实验三uCOS-II实验

北航ARM9嵌⼊式系统实验实验三uCOS-II实验实验三 uCOS-II实验⼀、实验⽬的在内核移植了uCOS-II 的处理器上创建任务。
⼆、实验内容1)运⾏实验⼗,在超级终端上观察四个任务的切换。
2)任务1~3,每个控制“红”、“绿”、“蓝”⼀种颜⾊的显⽰,适当增加OSTimeDly()的时间,且优先级⾼的任务延时时间加长,以便看清三种颜⾊。
3)引⼊⼀个全局变量BOOLEAN ac_key,解决完整刷屏问题。
4)任务4管理键盘和超级终端,当键盘有输⼊时在超级终端上显⽰相应的字符。
三、预备知识1)掌握在EWARM 集成开发环境中编写和调试程序的基本过程。
2)了解ARM920T 处理器的结构。
3)了解uCOS-II 系统结构。
四、实验设备及⼯具1)2410s教学实验箱2)ARM ADS1.2集成开发环境3)⽤于ARM920T的JTAG仿真器4)串⼝连接线五、实验原理及说明所谓移植,指的是⼀个操作系统可以在某个微处理器或者微控制器上运⾏。
虽然uCOS-II的⼤部分源代码是⽤C语⾔写成的,仍需要⽤C语⾔和汇编语⾔完成⼀些与处理器相关的代码。
⽐如:uCOS-II在读写处理器、寄存器时只能通过汇编语⾔来实现。
因为uCOS-II 在设计的时候就已经充分考虑了可移植性,所以,uCOS-II的移植还是⽐较容易的。
要使uCOS-II可以正常⼯作,处理器必须满⾜以下要求:(1)处理器的C编译器能产⽣可重⼊代码可重⼊的代码指的是⼀段代码(如⼀个函数)可以被多个任务同时调⽤,⽽不必担⼼会破坏数据。
也就是说,可重⼊型函数在任何时候都可以被中断执⾏,过⼀段时间以后⼜可以继续运⾏,⽽不会因为在函数中断的时候被其他的任务重新调⽤,影响函数中的数据。
(2)在程序中可以打开或者关闭中断在uCOS-II中,可以通过OS_ENTER_CRITICAL()或者OS_EXIT_CRITICAL()宏来控制系统关闭或者打开中断。
这需要处理器的⽀持,在ARM920T的处理器上,可以设置相应的寄存器来关闭或者打开系统的所有中断。
μcos_II之移植篇

/**Author:Callon Huang*Version:1.0*Time:2014/11/5*blog:/u/2451220761*/希望博客也能帮到你~第一步:μcosII源码下载/downloadcenter/STM32固件库stm32f10x_stdperiph_lib.zip的下载第二步:新建文件夹,并准备子目录:其中Software是μcosII源码下载完成后拷贝过来的,其它的都自己新建.App 用来存放应用程序文件,Bsp 用来存放版级驱动文件,Lib 用来存放 STM32 的标准外设库文件,Source 用来存放uCOS 文件第三步:把Software里的uCOS-II、uC-LIB和uC-CPU文件夹到Source里并把后两者拷贝到uCOS-II文件夹里,最后如下:第四步:找到Software\EvalBoards\ST\STM32F103ZE-SK\IAR下的BSP文件夹,复制到Source文件夹下第五步:找到Software\EvalBoards\ST\STM32F103ZE-SK\IAR下的OS-Probe-LCD文件夹,复制到Source文件夹下并改名为APP第六步:解压下载好的stm32f10x_stdperiph_lib.zip固件库:找到stm32f10x_stdperiph_lib\STM32F10x_StdPeriph_Lib_V3.5.0\Librari es\STM32F10x_StdPeriph_Driver下的inc和src文件夹并复制到Lib 文件夹下第七步:复制stm32f10x_stdperiph_lib\STM32F10x_StdPeriph_Lib_V3.5.0\Librari es\CMSIS下的CM3文件夹到Lib文件夹下第八步:删除一些不需要的文件:APP文件夹只需要:BSP文件夹只需要:在Software\CPU\ST\STM32里也有inc和src文件夹,但是比STM32固件库的要多两个文件stm32f10x_systick.c和stm32f10x_systick.h把这两个文件拷贝到SysTick文件夹下.第九步:建立工程my_ucosII,把所有的.c文件和.asm文件都加进来:‘第十步:对工程进行一些设置:Device就不用说了;Target不变;Output勾选上Create HEX File,并在里选择Obj文件夹;C/C++中添加头文件所在路径,否则会出现大量如下编译错误:头文件路径:Libraries文件夹是这三个最后这部分全部设置好后,如下:最后总体设置完如下:Debug里最后下载程序的时候,如果碰到MDK中出现“Error Flash download failed-Cortex-M3”错误,可以通过上面的添加On-chip-Flash来解决。
μCOS-II下通用驱动框架的设计与实现---UcOS-II
在卩C/OSII下,设计了一个通用的设备管理模型,称为通用驱动框架,通过该驱动框架,可以实现对硬件设备的统一、一致的管理,同时,也为上层应用程序提供了统一、一致的设备访问在卩C/OS-II下,设计了一个通用的设备管理模型,称为通用驱动框架,通过该驱动框架,可以实现对硬件设备的统一、一致的管理,同时,也为上层应用程序提供了统一、一致的设备访问接口,并在以ARM7TDMI-为核心的LPC2210微控制器开发板上给出了一例实现。
1 、概述在嵌入式应用系统中使用嵌入式操作系统可以提高应用系统的开发效率和提升嵌入式应用系统的稳定可靠性,因此,在嵌入式应用系统中使用嵌入式操作系统将成为嵌入式应用系统的设计主流⑴。
卩C/OSII是由美国学者Labrosse设计的一个优秀的嵌入式实时操作系统[2],它是一个源码公开、可移植、可固化、可裁剪、占先式的实时多任务操作系统,目前已经得到广泛应用。
卩C/OSII提供了操作系统必须具备的基本功能,包括:任务管理、信号量管理、邮箱管理、消息队列管理、事件管理、时间管理、内存管理,但它不提供设备管理和文件系统管理,已有研究者对卩C/OSII进行了文件子系统功能扩展⑻。
在实际应用中,对系统设备的有效管理也是一个非常重要的任务,因此,需要对卩C/OSII进行扩展,以实现这一功能。
本文为卩C/OSII设计了一个对系统设备进行统一管理的通用驱动框架,在此框架下,可以屏蔽系统硬件的差异,在无约束地发挥硬件能力的前提下,为上层应用提供了统一、一致的调用接口API ,从而实现了对系统设备的有效管理。
2、卩C/OSII下通用驱动框架的基本模型为了给上层应用提供统一、一致的系统设备调用接口,需要对上层应用程序对系统设备的访问操作进行抽象,在这方面,Unix 系统和Linux 系统做得比较成功[4][5]。
本文借鉴了Unix及Linux系统的成功经验,同时考虑到嵌入式操作系统的特殊性,为卩C/OSII 建立了如图1 所示的通用驱动框架模型。
COS到 ARM的移植简版介绍

μCOS-II到ARM S3C2440的移植学院:软件学院专业:计算机科学与技术姓名:刘志伟学号: 14999065年级: 2 0 1 4级指导老师:崔黎黎完成时间: 2017年O4月O5日1、移植条件一般来说,能移植μC /OS-Ⅱ的微处理器必须满足以下条件:1) 处理器的C编译器能产生可重入型代码。
2) 处理器支持中断,并且能产生定时中断。
3) 用C语言就可以开/关中断。
4) 处理器能支持一定数量的数据存储硬件堆栈。
5) 处理器有将堆栈指针及其他CPU寄存器的内容读出、并存储到堆栈或内存中去的指令。
2、移植需要编写的文件OS_CPU.H(C语言头文件)OS_CPU_C.C(C程序源文件)OS_CPU_A.ASM(汇编程序源文件)3、OS_CPU.H的移植1)数据类型的定义2)堆栈的定义堆栈中,编译器的编译选项和由此生成的堆栈指令决定堆栈的增长方向。
在μC/OS-Ⅱ中, 用OS_STK_GROWTH 来设置堆栈的增长方向, 其宏定义为: #define OS_STK_GROWTH 1; /* 堆栈从高地址向低地址增长*/ #define OS_STK_GROWTH 0; /* 堆栈从低地址向高地址增长*/ 3)中断与临界区代码#define OS_TASK_SW()OSCtxSw() /*任务切换*/#define OS_EXIT_CRITICAL()ARMDisabIeInt() /*关闭中断*/#define OS_ENTER_CRITICAL()ARMEnableInt()4)使用软中断SWI作底层接口4、OS_CPU_C.C的移植在此文件中, 要求我们必须编写10 个简单的 C 函数。
OStaskStkInit(); /*任务堆栈初始化函数*/ OStaskCreateHook (); /*任务建立接口函数*/ OStaskDelHook (); /*任务删除接口函数*/ OStaskSwHook (); /*任务切换接口函数*/ OStaskIdleHook (); /*空闲任务接口函数*/ OStaskStatHook (); /*统计任务接口函数*/ OSTimeTickHook (); /*时钟节拍接口函数*/ OStaskHookBegin (); /*系统初始化开始接口函数*/ OStaskHookEnd (); /*系统初始化结束接口函数*/ OSTCBInitHook (); /*控制块初始化接口函数*/唯一必要的函数是OsTaskStkInt()函数。
uCOS-II嵌入式操作系统介绍与移植

OSStartHighRd
1、该函数是在OSStart函数中调用 2、负责从最高优先级任务的TCB中获得该任务的堆
栈指针sp,并依次将cpu现场恢复,这时系统就将 控制权交给用户创建的该任务进程,直到该任务被 阻塞或者被其他更高优先级的任务抢占cpu 3、该函数仅在多任务启动时被执行一次,用来启 动之前创建的第一个,也就是最高优先级的任务执 行
3、可从网站上获 得全部源码及其在各种体系结构平 台上的移植范例。
uC/OS-II特点
1、uC/OS-II内核具有可抢占的实时 多任务调度功能
2、提供了许多系统服务,如信号量、 消息队列、邮箱、内存管理、时间 函数等
3、这些功能可以根据不同的需求进 行裁减。
uC/OS-II的移植
ARM处理器相关宏定义
1、退出临界区
#defineOS_ENTER_CRITICAL() ARMDisableInt()
2、进入临界区
#defineOS_EXIT_CRITICAL() ARMEnableInt()
堆栈增长方向
1、堆栈由高地址向低地址增长,这个也 是和编译器有关的,当进行函数调用时, 入口参数和返回地址一般都会保存在当 前任务的堆栈中,编译器的编译选项和 由此生成的堆栈指令就会决定堆栈的增 长方向。
#define OS_STK_GROWTH 1
OS_CPU.c的移植
1、任务堆栈初始化 2、系统hook函数 3、中断级任务切换函数
任务堆栈初始化OSTaskStkInit
1、由OSTaskCreate或OSTaskCreateExt调用 2、用来初始化任务的堆栈并返回新的堆栈指针stk。
退出/进入临界区函数 ARMDisableInt/ARMEnableInt
嵌入式μCOS-II内核实验四(哲学家就餐问题的实现)

目录
• 引言 • 哲学家就餐问题概述 • μcos-ii内核任务管理 • 哲学家就餐问题的μcos-ii实现 • 实验结果与分析 • 总结与展望
01
引言
嵌入式系统与μcos-ii内核简介
嵌入式系统
是一种专用的计算机系统,主要用于控制、监视或帮助操作 机器设备。它通常具有实时性、可靠性和低功耗等特点,广 泛应用于工业控制、智能家居、医疗设备等领域。
任务优先级与调度
任务优先级
在μcos-ii内核中,每个任务都有自己 的优先级。优先级高的任务会优先获 得CPU的使用权。
任务调度
μcos-ii内核使用基于优先级的抢占式任务 调度算法。当一个高优先级的任务就绪时, 内核会立即抢占当前正在运行的任务,并切 换到高优先级的任务上运行。
任务同步与通信
任务同步
解决方案的分类与比较
解决方案分类
解决哲学家就餐问题的方案可以分为两类:静态方案和动态方案。静态方案在 系统启动时分配固定的资源,而动态方案则在运行时动态地分配资源。
解决方案比较
静态方案实现简单,但可能导致死锁或饥饿问题。动态方案可以更好地解决这 些问题,但实现起来较为复杂,需要更多的系统资源和时间。在实际应用中, 需要根据具体需求和系统限制选择合适的解决方案。
05
实验结果与分析
实验环境与配置
01
硬件平台
ARM Cortex-M4微控制器 (具体型号为
STM32F407ZGT6)
02
开发环境
Keil uVision5
03
04
实验任务
实现基于μcos-ii内核的多任务 切换
配置参数
任务优先级、任务堆栈大小、 任务状态等