地形高程自适应的星载InSAR图像配准方法
地理信息系统-操作指南-星载雷达数据InSAR处理
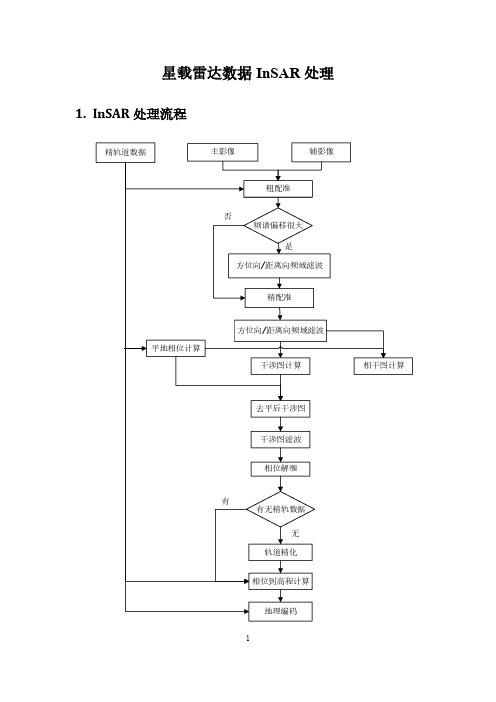
星载雷达数据InSAR处理1.InSAR处理流程图 1 InSAR处理流程虽然InSAR干涉测量的几何原理较为简单,但是在实际的数据处理中却涉及很多的数据处理算法,需要经过一系列的信号处理过程才能获得区域的干涉相位图和区域DEM。
2.实验区域与数据SAR图像对的选择,主要考虑合适的时间基线距和空间基线距,时间基线距越长,相干性越差;空间基线距越长,模糊高度越小,能够获得较高的高程精度,但是空间去相干越大,因此需要根据具体需求选择。
InSAR处理流程演示案例采用的是覆盖赤峰地区2017年02月17日、2017年03月18日相隔一个月的GF3干涉对,该干涉对具有较好的时间基线与空间基线,相干性较好。
详细数据列表如下:表1 影像数据列表图2 GF3原始影像及DEM数据3.详细操作步骤3.1.主辅影像导入将GF-3数据导入成PIE雷达处理模块标准数据格式(裸数据+参数文件)。
由于多种误差源的存在,不同来源的SAR数据通常存在辐射误差,为精确反映地物回波特性,PIE-SAR软件程序内部已做辐射校正处理。
选择菜单栏【数据导入】→【批量数据导入】→【GF3条带】,打开“GF3批量导入”对话框。
图3 GF3条带数据批量导入菜单栏图 4 GF-3条带数据批量导入对话框●【产品级别】:L1A●【成像模式】:FSI●【极化类型】:HH●【输入目录】:选择待导入的GF3条带影像所在的文件夹●【输出文件名前缀】:成像日期数据导入后生成影像数据文件和参数文件。
输出文件可以用原始数据名称命名,成像时间靠前的作为主影像,时间在后的作为辅影像。
数据文件可保存为ENVI标准格式、TIFF、Erdas img。
参数文件以xml格式存储,包含SAR图像的栅格属性、成像时刻、成像几何以及轨道等InSAR处理必须的参数信息。
图5 导入数据后生成文件列表图 6 参数文件示例3.2.配准3.2.1.粗配准粗配准主要是借助星载雷达数据的轨道信息,根据成像多普勒方程、距离方程和参考椭球方程计算主辅影像的初始偏移量,计算出的初始偏移量误差一般可达到距离向±5个像元和方位向±10个像元。
InSAR技术基本原理及其数据处理流程

关键词介绍
1、InSAR:干涉合成孔径雷达,一种利用卫星雷达数据进行地形测量和地表 形变监测的技术。
2、干涉测量:利用两束或多束雷达信号之间的相位差进行地形或地表形变 测量的方法。
3、地形测量:使用各种测量技术对地球表面进行测绘,生成地形图或其他 地形数据。
4、卫星定位:利用卫星导航系统确定地球上某点的位置坐标。
数字图像处理的基本步骤包括图像数字化、特征提取和模式识别等。
1、图像数字化
图像数字化是将现实世界的图像转换为数字信号的过程。在数字图像处理中, 首先要将图像通过相机、扫描仪等设备进行数字化,将其转换为计算机能够处理 的数字信号。
2、特征提取
特征提取是从数字化图像中提取出有用的特征信息的过程。这些特征可能包 括颜色、纹理、形状等,它们对于后续的模式识别和决策具有重要意义。
InSAR技术基本原理及其数据 处理流程
01 引言
03 参考内容
目录
02 关键词介绍
引言
InSAR,即干涉合成孔径雷达,是一种利用卫星雷达数据进行地形测量和地 表形变监测的技术。近年来,InSAR技术在地球科学、水文学、气象学等领域的 应用不断扩大。本次演示将介绍InSAR技术的基本原理及其数据处理流程,希望 帮助读者更好地理解这一技术。
2、车牌识别
车牌识别是数字图像处理技术在智能交通领域的应用。它通过计算机对输入 的车牌图像进行处理和分析,提取出车牌号码等信息,从而实现车辆的自动管理。 车牌识别技术广泛应用于停车场、高速公路收费站等场所,提高交通效率和管理 水平。
3.遥感影像处理
遥感影像处理是数字图像处理技术在地理信息科学领域的应用。它通过高分 辨率卫星影像等遥感数据,提取出地物的空间位置、形状、纹理等信息,从而为 土地资源调查、城市规划等领域提供数据支持。遥感影像处理技术广泛应用于地 理信息科学领域,为社会发展提供重要的数据支撑和技术保障。
INSAR技术原理及方案

INSAR技术原理及方案INSAR(Interferometric Synthetic Aperture Radar)是一种利用合成孔径雷达(SAR)进行干涉测量的技术。
该技术可以通过测量两幅或多幅SAR图像之间的相位差来获取地表的形变、变化和高程信息。
INSAR 技术广泛应用于地壳运动监测、地震研究、冰川变化监测、地质勘探等领域。
INSAR的原理基于雷达测量物体反射信号的相位差。
当雷达发射一束微波信号并接收到目标反射的回波信号时,由于目标周围存在着各种复杂的地物和地形,回波信号会受到干扰和散射,导致信号相位的变化。
通过INSAR技术,可以将两个或多个不同的SAR图像进行干涉处理,将其中一个图像作为参考图像,另一个图像作为目标图像,通过测量两幅图像之间的相位差,得到地表形变或高程信息。
1.单视向INSAR:该方案是最简单的INSAR方案,仅利用一对SAR图像进行干涉处理。
这种方案适用于平坦地形或地表形变较小的区域。
在处理过程中,需要校正图像之间的几何失配,消除大气和电离层的干扰,并进行相位展开以获取连续的相位图。
2.多视向INSAR:该方案利用多个视角的SAR图像进行干涉处理,可以提高水平方向上的分辨率,并减小多路径干扰的影响。
利用多视角的观测,可以通过三角测量的方法获取地表高程信息,并对地表形变进行更精确的测量。
3.多基线INSAR:该方案利用多对具有不同基线的SAR图像进行干涉处理。
通过使用不同基线的图像,可以增加测量结果的解相关性,提高地表形变或高程信息的精度。
然而,多基线INSAR的处理复杂度更高,需要考虑相位不连续问题,需要进行相位解缠以获取准确的相位信息。
总之,INSAR技术通过利用SAR图像的相位信息,可以实现地表形变和高程的测量。
不同的INSAR方案适用于不同的应用场景,可以根据具体需求选择最合适的方案。
然而,INSAR技术仍然面临一些挑战,包括大气和电离层干扰的处理、相位不连续问题的解决以及数据处理的复杂性。
INSAR复影像配准方法

四、处理过程及结果分析
处理过程——7.生成相干图
将主影像和重采样后的辅影像以3x3像素 的窗口大小逐点计算相干系数,进行灰度化处 理,生成相干图。
四、处理过程及结果分析
结果分析——相干系数统计
四、处理过程及结果分析
四、处理过程及结果分析
图4.4 主图像匹配点(单视)
图4.5 辅图像匹配点(单视)
四、处理过程及结果分析
图4.6 相干图
图4.7 相干系数法粗配准干涉条纹图
四、处理过程及结果分析
图4.8 精配准干涉条纹图(双三次卷积)图4.9 精配准干涉条纹图(双线性内插)
四、处理过程及结果分析
处理过程——6.生成干涉相位图
结果分析——相干系数统计
粗
精
配
配
准
准
四、处理过程及结果分析
结论
1.采用相干系数法进粗配准,采用基于相干系数拟合的方法进行精配准, 采用双线性插值的方法进行重采样,对格网间距大小的选取进行了试验, 随着格网点间距的增大,配准窗口要相应增大,才能保证可靠的配准精度。 2.随着格网间距的增大,计算速度提高,但是干涉条纹的质量有所下降,主 要原因在于参考点的间隔增大,不利于图像的重建,造成了采样后图像的 不清晰。 3.通过星载数据的试验验证,采用相干系数法进行粗配准,采用基于相干 系数拟合的方法进行精配准,方法可行有效且运算效率高。
内容摘要
研究目的及意义 国内外研究现状 复影像匹配基本思想 处理过程及结果分析
参考文献
五、参考文献
[1]王超,张红,刘智.星载合成孔径雷达干涉测量[M]. 北京:科学出版社,2019 [2]曾琪明,焦健.合成孔径雷达遥感原理及应用简 介 [J].遥感信息,2019,1一4期 [3]郭丽娜.合成孔径雷达干涉测量中的复影像配准 方法[D],中国地质大学,2019 [4]牛瑞. INSAR复影像配准方法与实践[D], 解放军 信息工程大学,2019
InSAR经典图像配准及比较

InSAR经典图像配准方法及比较1前言合成孔径雷达干涉测量(InSAR)利用雷达两次获取同一地区的回波信号进行干涉处理得到干涉相位,利用干涉相位可提取地面高程和形变信息。
目前卫星SAR复数影像是InSAR 应用的主要数据源。
卫星SAR系统采用单天线重复轨道工作方式, 卫星一次通过某地区只能获取一幅影像(单视复图像),卫星以一定的时间间隔和轻微的轨道偏移重复通过该地区时再次成像。
由于轨道偏移,这两幅影像并不完全重合,因此卫星SAR影像配准就成为干涉处理的首要步骤,也是影响干涉相位图质量以及最终成果精度的关键因素之一。
SAR复数影像精配准首先对参考影像和待配准影像进行采样,并在参考影像上确定均匀分布的N个控制特征点,以控制特征点为中心选取一定大小的匹配窗口。
再根据粗配准的影像偏移量,在待配准影像上相应位置选取比匹配窗口大的搜索窗口。
在搜索窗口内按一定顺序逐像元移动匹配窗口,计算两匹配窗口的匹配指标值。
InSAR图像配准的三种常用方法——相干系数法、最大频谱法、相位差影像平均波动函数法匹配实现步骤大致相同,只是根据匹配窗口中计算的匹配指标、计算方法及选取配准点的标准不同。
2相干系数法用相干系数r作为匹配测度的步骤与数字摄影测量中用相关系数ρ作为匹配测度时的大致相同。
在参考影像以待匹配点为中心取一定大小的窗口,在对应输入影像的一定搜索范围内,逐行、逐个像素地移动,并计算窗口内的相干系数,相干系数最大处即为最佳匹配点。
一般相干性系数定义为:r=12E u12E u22实际计算时,通常用样本的平均值来代替数学期望,此时相干系数的计算公式为r=S1i,jnj=0mi=0S2∗i,j e−jφi,jS1i,j2nj=0mi=0S2i,j2nj=0mi=0一般在初步确定同名点后,在从影像上以该象素点为中心取大小为M×M的窗口,对应在从影像上以待配准点为中心取出大小为N×N窗口的数据。
然后在一定的搜索范围内,在从影像上逐点移动窗口,计算每个窗口的相干系数r值,相干系数最大处即为最佳匹配点。
基于曲线拟合的干涉合成孔径雷达(InsAR)复图像自动配准算法

基于曲线拟合的干涉合成孔径雷达( s R 复图像 自动配准算法 I A ) n
刘宝泉 冯大政 李军侠 武 楠
707) 1 0 1 f 西安电子科技 大学雷达信 号处理重点 实验 室 西安
摘 要:由于乘性噪声和相干斑的存在,干涉合成孔径雷达( S R I A )复图像对的配准算法比传统的图像配准算法 n
i a p i d o r g s e i g wih u - i e a c r c .Th x e i e t l r s ls de o s r t h l o ih s o s p l t e it rn t s b p x l c u a y e e e p rm n a e u t m n t a e t e a g rt m i f
的共有特征 能够匹配 对应起来 的过程 。随着干涉合成孔径雷
Ab t a t s r c :Du he p e e c fmu tp ia i e a p c l o s ,t e me h d o e i t rn nS e t r s n e o li l tv nd s e k e n ie h t o fr g s e i g I AR ma e i mo e c i g s r d f c l t a r d to a ma e r g s r to t o s n t i p p r .a u o a i n AR ma e r g s r to i u t h n t a ii n l i g e it a in me h d .I h s a e i n a t m tc I S i g e it a in m e h d i r s n e ,b s d o s l e c r e ft i g a t h n ,t a a l h nd e t e r g s r to fI AR t o s p e e t d a e n B— p i u v tn nd ma c i g h t c l a l h e it a i n o nS n i i g f ce ty. t r t er g s r to a a e e sa e e t b ih d b h a ts u e me h d, wo s e e h d ma e e in l Afe h e i a in p r m t r s a l e y t e l s q a t o a t -t p m t o i t r s e r
星载InSAR高精度几何处理

作者简介
作者简介
这是《星载InSAR高精度几何处理》的读书笔记,暂无该书作者的介绍。
感谢观看
《星载InSAR高精度几何处理》这本书的目录按照逻辑结构和内容主题进行 组织,分为引言、基础理论、数据处理、算法优化和案例分析等几部分。这种组 织方式有利于读者对书籍内容的全面了解,同时能够根据个人需求选择感兴趣的 部分进行阅读。
这本书的目录中,每个章节都采用了简洁明了的标题,能够准确反映章节内 容。章节安排遵循由浅入深、由理论到实践的顺序,使得读者能够逐步深入了解 星载InSAR高精度几何处理的相关知识。每个章节都设置了相应的编号和标题, 方便读者查找和阅读。
作者提到了InSAR的基本原理,即通过将多个雷达脉冲组合起来,生成一个 大的合成孔径,从而提高了地面目标的分辨率。然而,由于雷达脉冲在传播过程 中会受到大气延迟、多普勒频移等因素的影响,因此需要采用干涉技术来消除这 些误差。
接下来,作者详细介绍了InSAR的几何处理方法。通过将多个干涉图进行叠 加,可以消除地形平面的影响,从而得到高精度的地形信息。通过采用相位差测 量技术,可以消除大气延迟和多普勒频移的影响。作者还介绍了如何采用最小二 乘法对干涉图进行相位解包,从而得到准确的地面目标信息。
作者通过多个实例展示了InSAR技术在地球观测领域的应用。这些实例包括 土地利用分类、地形测绘、洪水监测和城市规划等。通过这些实例,读者可以深 入了解InSAR技术在不同领域的应用和优势。
《星载InSAR高精度几何处理》这本书是一本关于地球观测领域的宝贵指南。 无论大家是从事地球观测、遥感监测还是雷达系统设计工作的专业人士,这本书 都将成为大家不可或缺的参考书籍。通过阅读这本书,大家将深入了解InSAR技 术的最新进展和最佳实践,从而在大家的工作中获得更多的灵感和成果。
ARCGIS影像配准与空间配准方法
ArcGIS影像配准与空间配准ArcGIS影像配准与空间配准地图配准可分为影像配准和空间配准。
影像配准的对象是raster图,譬如TIFF图。
配准后的图可以保存为ESRI GRID, TIFF,或ERDAS IMAGINE格式。
空间配准(Spatial Adjustment)是对矢量数据配准。
一、影像配准在ArcGIS中配准:1.打开ArcMap,增加Georeferencing工具条。
2. 把需要进行纠正的影像增加到ArcMap中,会发现Georeferencing工具条中的工具被激活。
在view/data frame properties的coordinate properties中选择坐标系。
如果是大地(投影)坐标系选择predefined中的Projected coordinate system,坐标单位一般为米。
如果是地理坐标系(坐标用经纬度表示)表示则选择Geographic coordinate system。
3.纠正前可以去掉"auto adjust"前的勾。
在校正中我们需要知道一些特殊点的坐标。
如公里网格的交点,我们从图中均匀的取几个点,不少于7个。
在实际中,这些点要能够均匀分布在图中。
4.首先将Georeferencing工具条的Georeferencing菜单下Auto Adjust不选择。
5.在Georeferencing工具条上,点击Add Control Point按钮。
6.使用该工具在扫描图上精确到找一个控制点点击,然后鼠标右击,Input X and Y输入该点实际的坐标位置。
采用地理坐标系时应输入经纬度,经纬度用小数表示,如110°30'30'应写成 110.508(=110+30.5/60)。
7.用相同的方法,在影像上增加多个控制点,输入它们的实际坐标。
8.增加所有控制点后,在Georeferencing菜单下,点击Update Display。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018年4月第45卷第2期西安电子科技大学学报(自然科学版)JOU RN AL OF X ID IA N U N IV E R SIT YApr. 2018Vol. 45 No. 2doi:10.3969/j. issn. 1001-2400.2018.02.006地形高程自适应的星载InSAR图像配准方法张金强,索志勇,李真芳,保铮(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)摘要:星载干涉合成孔径雷达在基线较长或观测场景内地形复杂度较高时,地形高程对主辅图像间配准偏移量的影响不可忽略,利用二维二元低阶多项式模型拟合配准偏移量的精度较低,当利用控制点处配准偏移量估计多项式系数时,控制点数量和位置分布对估计精度的影响较大.针对上述问题,提出了地形高程自适应的降维图像配准方法.为了追踪主辅图像间配准偏移量随地形高程的变化,提高配准偏移量的拟合精度,提出了包含地形高程项的二维三元一阶多项式模型.利用主辅图像的成像参数和轨道数据计算多项式一次项系数,将需要利用控制点处配准偏移量估计的系数减少为两个常数项系数,提高了估计的稳健性.实测数据处理结果验证了该方法的精确性和稳健性.关键词:星载干涉合成孔径雷达;图像配准;地形高程;系数估计中图分类号:TN957 文献标识码:A 文章编号:1001-2400(2018)02-003卜06Terrain elevation adaptive method forspaceborne InSAR coregistrationZ H A N G Jinqiang, SUO Zhiyong, L I Zhenfang, B A O Zheng(National Key Lab. of Radar Signal Processing, Xidian Univ. , Xi?an 710071, China) Abstract:r rhc shifts between master and slave images arc influenced by the terrain elevation in the ease oflong baselines and/or rough topography for spaceborne interferometric synthetic aperture radar (In S A R). Itis inaccurate to approximate the shifts using a two-dimensional (2-D) two-variable polynomial of a lowdegree. Furthermore, the performance of the method to estimate the polynomial coefficients using the shiftsof control points is affected by the number and distribution of the control points greatly. T o tackle theproblems above, a terrain elevation adaptive reduced-dimension image coregistration method is proposed.The shifts arc approximated by a 2-D three-variable polynomial of the first degree including the variableassociated with the terrain elevation. The polynomial can pursuit the variations of the shifts with the terrainelevation and increase the precision of shift approximation. The first-order coefficients of the polynomial arccalculated by the imaging parameters and orbital data of master and slave images, and two constants arcestimated from the shifts of control points. The robustness of the coefficient estimation is improved. Theprecision and robustness of the proposed method arc validated by data acquired by the TerraSAR-X.Key Words:spaceborne interferometric synthetic aperture radar (In S A R); image coregistration; terrainelevation; coefficient estimation星载干涉合成孔径雷达(Interferometric Synthetic Aperture Radar,InSAR)技术利用不同观测几何下,获取的两幅合成孔径雷达(Synthetic Aperture Radar,SAR)复图像间的干涉相位反演来获取地表三维地形[1_3].为了从S A R复图像对中获取干涉相位信息,需要对其进行配准处理,以确保用于干涉处理的图像像素对应于地面同一散射单元图像配准精度将影响InSAR系统的最终产品精度M.因此,研究稳健高精收稿日期:20丄7-04-28 网络出版时间:2(H7-09-28基金项目:国家自然科学基金资助项目(61671355,61601298)作者简介:张金强(1989 —),男,西安电子科技大学博士研究生,E-mail: zhjq0621@gmail. com.网络出版地址:http: 广/kns. enki. net/kcnis/detail/61. 1076. TN. 20170928. 2210. 012. litml32西安电子科技大学学报(自然科学版)第45卷度I n S A R图像配准方法具有重要意义.已有的I n S A R图像配准方法主要可分为两大类:第1类方法首先利用基于图像数据或图像特征的方法估计控制点处配准偏移量,然后根据二维1低阶多项式模型计 算其他像素处的配准偏移量,该类方法没有考虑地形高程对配准偏移量的影响•当基线较长或观测场景内地 形复杂度较高时,利用匕维二元低阶多项式模型拟合配准偏移量的精度较低[u]i野利用控制点处配准偏移 畺估计多项式系数时,控制点数畺和位餐分布对系数估计精度的影响较大;第2类方法貫先利用几何配准 法h i计算每一像素的初始配准偏移鼙然后利用_制点处高精度配准偏移暈;根据二维二元一阶多项式模型 校正初始配准偏移量[|.从而获取全场景高精度配准偏移賛该类方法需要进行逐像素几何配准处理,运算 效率较低.针对上述问题》笔者提出了地形高程自适应的降维图像配准方法,首先,给出了主辅图像间的配准偏移 量算模型;然后为了追踪配准偏移:量随地形高程的变化•根据配准偏移量计算模型提出了包含地形高程 项的二维三元一阶多项式模型.利用该模型不仅可以精确拟合主辅图像间的配准偏移量U而且能够避免逐像 素几何配准处理4最后< 通过降维处理将需要利用控制点处配准偏移量估计的多项式系数减少为两个常数项 系数,提高了系数估计的稳健性.实测数据处理结果验证了文中方法的精确性和稳健性.1星载InSAR降维图像配准方法1.1配准偏移量计算模型i辅图像间的配准偏移最计算流程包括两步:首先,通过货向定位获取主图像像素对应的目标|维位 釁;然后,通过反向定位获取J5述目标在辅图像上的坐标.针对主图像上某一像素,将成像参数和轨 道数据代入下列3式:'R= |.P(f)-T, ⑴</lS =-2(P(r i -T)t V(^)/(A I Pit) -r]),(2),(丁—)/(足 p十 r:/j?:; =i,(3)所示的距离-多普勒模型[u—i g求解目禄_维位置,即iE向定位,其中•表示霄达斜距表示方位时间;p(f)•表示卫星位置矢量;T=(i;,i v,r s)T,表亲■棒s维检屬:*/,K _.示成像多普勒频率:;V G) =(V^表麻]t星速度兔量;a表示雷达波长;&表示目标齎義;p a)和v(o隨时间変化;民和i?p分别表示赤道和极:地半儀*B i?p=(1 —P(i?t+f)</为參考椭球扁率;:P、F和T均棄义在世界测地系统 (W o fld (Jeodeti'c.Sy.s t.&m-1984, WGS^S.I.:).壶标系下.利用巨标e维位置r、辅图像成像参数和轨道数据•首先根据式(2)计算该目标对应的辅图像方位时间 ^然后根据式(1)计算时刻〖目标到雷达的斜距尺,最后根据(■a=(f—/,j)/p,(4)(r =(R —R…H2f j v) ,(1)计算该目标在辅图像i,的二维坐标,其中a表示图像方位向第i个像素对应的方位时间表示脉冲重复频率^fi表.示图像距离向第1个像素对应的雷达斜距表示脉冲采样频率,r表示光速.上述过程称 为反向定位1.2配准偏移量拟合模型由配准偏移量#算模型可知•_标在辅图像上的方位和距离坐标随其在主图像上的方位、距离坐标和高 程变化.传统配准方法假设自标高程对配准偏移邊的影响可以忽略.用含有方位和距离坐标项的二维二元低 阶多项式模虛拟合配准偏移量随主图像方位和距离坐标的变化.当主辅图像间的基线较长或观测场景内地 形复杂度较高时,地形禽程对配准偏移量的影响不能忽略.为了追踪配准偏移量随地形高程的变化•可用{«s p=d…+#2r)I>4*c?sA,C6)+翁,C7>所示的包含地形禽程项的二维三元一阶多项式模型拟合i辅图像间的坐标关系,其中〜A和&〜心 表示拟合系数.第2期张金致.等:地#高#自适应的星载InSAR 图像.配,准方法331.3系数估计式(6)利式(7)所示的二维三元一阶多项式模型存在8个未知系数.传统配准方法利用控制点处配准偏 移量估计上述未知系数,控制点数量和位置分布对系数估计精度影响较太.为了降低控制点对系数估计的影 响.提高系数估计的稳健性.文中给出了利用主辅图像的成像参数和轨道数据计算一次项系数的公式.一次 项系数计算公式的推导包括三步:首先,根据正向定位模型.推#S 标三维位置相对宁主图像方位时间、雷达 斜距和目标高程的一阶偏导数;然后,根据反向定位模型.推#P 标对应辅图像方位时间和雷达斜距相对于 目标三维位置的一阶偏导数;最后,结合上述两步结果得到一次项系数的计算公式.根据正向定位模型,将式)〜式(3.)中目标三维位置分别对方位时间、,雷达斜距和廣标高程求一阶偏导 数.得到(IT (^T (^T 1 1, r I |. » , r =D [(p- ^ T> v '" • 1" + (p'" ^ T) ,()] , (8)f m& m J <1T = \^Tx dTy dTz -狀m _L m _(9)D 3T (IT c?T 丄工 y z(]h ’(]h ’ (]hP —T P in . a : x m . 3;y y in . xI I D 0,0,:T ,K +h ,T y P m ,z — T z; y m <z Rld o )(i i )(R^ + h V (K +h Y 其中,表示主卫星加速度矢量.其他参数与1. 1节的参数含义相同,下标m 表示主图像对应的参数.根据反向定位模型,将式(1)和式(2)中方位时间和雷达斜距分别对目标三维位置求一阶偏导数,得到么_d T clT < 九_ (1T 'clT '(IT . x y z -a R … <ma 吼<1T ,dT \V .P T K . 2 \P ,-T \,,(Pf - T );rVa :〇%/a r ) - (P s - T) 愚一 r l (12)(13)K = IV12 + (P, - TYlA K + (P\^T)t ^ * H i )其中• A ,表示辅卫星加速度矢量.其他参数与1. 1节的参数含义相苘,下标s 表示辅图像对应的参数.根据式(4)〜式(5)和式(8)〜式(U ),得到目标在辅图像上的二维坐标相对于其在主图像上的二维坐标 和高程的一阶偏导数为dy ~= ^jL = f7〜1〔為)m 1 f f j P -S ’J p .m 05)gl =T f d T ')1 2/5,s 06)而m U t J J /一 _ C 'dt =r ^V J ;f d T 、)C f 07)厂m1 2/_ Jp's 'g i =d f 、T f dT ^ r 2/_(18)U r J )2/…m r=A =dh \M (f )JF p ,,^09)^3 =_ f9rs _ {dh {J T )2/“c (20)其中,^和&的单位为像素/m.:上述偏导数随主ffl 像二维坐标和目标高程变化.虫手星载S A R 的雷达斜距 较大[11].在一定观测场景范围内.上述偏导数的变化对配准偏移量的影响可以忽略.S 此•在实测数据处理 过程中v 利用观测场景中心处目标对应的主辅图像的成像参数和轨道数据,根据式(15)〜式(2Q )计算 < 〜34西安电子科技大学学报(自然科学版)第45卷^3和〜容3*1.4处理流程如图1所示,地形高程自适应的降维图像配准方法处理流程包括如下步骤:(1) 利用观测场景中心处目标对应的主辅图像的成像参数和轨道数据,根据式(15)〜式(20)计算心〜 < 和心〜g 3.(2)在主图像上选取一定数量的控制点,采用基于图像数据或图像特征 的方法估计控制点处配准偏移量.(3) 根据式(6)和式(7),补偿控制点处配准偏移量的一次分量,利用剩余配准偏移量估计4和(4) 根据式(6)和式(7),计算其他像素处配准偏移量.图1 文中方法的处理流程文中方法需要输人主图像像素对应的目标高程,其可以利用先验数字高程模型(Digital Elevation M odeU D EM )通过正向定位获取.2实测数据处理与分析利用TerraSAR -X 分别于2010年3月8日和2010年3月19日对某地区进行重复航过观测任务时,获 取的两幅S A R 复图像来验证文中方法,取2010年3月8日获取的S A R 复图像为主图像.主要系统参数如 表1所示,S A R 幅度图像如图2(a )所示.在图2(a )方框所示的区域内选择12个特显点以定量评估配准精 度,如图2(b )所示.图2(c )为观测场景对应的航天飞机雷达地形测绘任务(Shuttle Radar Topography M issi 〇n ,S R T M )D E M ,已将其投影到主图像斜距乎面,观测场景幅宽为IS k m X 15 k m ,观测场景内目标高 程变化为695 m .表1 TerraSAR -X 主要系统参数参数名雷达载频/G H z 脉冲重复频率/H z 脉冲采样频率/M H z 垂直基线/m 水平基线/m 参数值9. 65 3 744. 76161. 83104. 3420. 66图2 TerraSA R -X 重复航过数据距离向/像素(c ) S R T M D E M利用图1所示的处理流程对主辅图像进行配准处理,在主图像内均匀选择100个控制点.控制点处配准 偏移量采用实相关函数法m 估计,图像子块的大小为64像素X 64像素.配准后主辅图像间的干涉相位图如 图3所示.利用文中方法配准后的主辅图像可以获得清晰的干涉相位图,验证了文中方法的有效性.为了验证文中方法的精确性和稳健性,利用蒙特卡罗实验对比分析文中方法与二阶多项式方法(利用二 维二元二阶多项式模型拟合配准偏移量,并且多项式系数均利用控制点处配准偏移量估计)在不同控制点数 量下的配准性能.蒙特卡罗实验次数为100次.在主图像内均匀选择900个控制点,控制点处配准偏移量采 用实相关函数法估计,图像子块的大小为64像素X 64像素.每次实验从上述900个控制点中随机选择一定 数量的控制点估计多项式拟合系数.配准误差利用图2(b )所示的12个特显点进行估计.对配准后主辅图像 上的同名特显点进行200倍插值,将峰值间的距离向和方位向偏移量作为该特显点处的配准误差.图4给出了二阶多项式方法和文中方法配准误差均方根值随控制点数量的变化.由图4可知,二阶多项式方法配准误差随控制点数量变化较大,而文中方法配准误差随控制点数量变化较小.例如,当控制点数量为10个时,二阶多项式方法的方位向和距离向配准误差分别为0.79像素和0.86像素,文中方法的方位向和距离向配准误差分别为0.05像素和0.07像素;当控制点数量为100个时,二阶多项式方法的方位向和距离向配准误差分别为0.05像素和0.12像素,文中方法的方位向和距离向配准误差分别为0.04像素和0.05像素.由表1可知,主辅图像间的垂直基线大于水平基线,导致目标高程对距离向配准偏移量的影响大于方位向配准偏移量,所以二阶多项式方法的距离向配准误差大于方位向配准误差.文中方法可以追踪配准偏移量随目标高程的变化,所以文中方法的方位向和距离向配准误差近似相同,并且可以满足0.1像素的配准精度要求.上述结果验证了文中方法的精确性和稳健性.图3 干涉相位图图4 二阶多项式方法和文中方法配准误差统计结果为了直观证明文中方法相对于二阶多项式方法的精确性和稳健性,图5给出了控制点数量为10个时,100次试验的12个特显点处的配准误差分布.图5(a )~(d )分别为二阶多项式方法的方位向和距离向配准误差㊁文中方法的方位向和距离向配准误差.由图5可知,二阶多项式方法的方位向和距离向配准误差最大值分别为3.47像素和3.45像素,而文中方法的方位向和距离向配准误差最大值分别为0.17像素和0.30像素.图5 二阶多项式方法和文中方法配准误差分布3 结束语针对长基线或复杂场景星载I n S A R 图像配准问题,文中提出了地形高程自适应的降维图像配准方法.首先,给出了主辅图像间的配准偏移量计算模型;然后,提出了包含地形高程项的二维三元一阶多项式模型.该模型可以追踪配准偏移量随地形高程的变化,提高了配准偏移量拟合精度;最后,利用主辅图像的成像参数和轨道数据计算多项式一次项系数,将需要利用控制点处配准偏移量估计的系数减少为两个常数项系数,提高了系数估计的稳健性.实测数据处理结果验证了文中方法的精确性和稳健性.参考文献:[1]Y A G U E -MA R T I N E ZN,P R A T S -I R A O L AP ,G O N Z A L E ZFR,e t a l .I n t e r f e r o m e t r i cP r o c e s s i n g o f S e n t i n e l -1T O P S D a t a [J ].I E E ET r a n s a c t i o n s o nG e o s c i e n c e a n dR e m o t eS e n s i n g ,2016,54(4):2220-2234.53第2期 张金强等:地形高程自适应的星载I n S A R 图像配准方法36西安电子科技大学学报(自然科学版)第45卷[2] I丄'N G C,FIELDING E J. Interferometry with 八LOS-2 Full-apcrturc ScanS八R Data [J] . Transactions onGeoscience and Remote Sensing, 2017,55(5) :2739-2750.[3]于瀚雯,保铮.利用L1范数的多基线In S A R相位解缠绕技术[J].西安电子科技大学学报,2013, 40(4 ): 37-zll.YU Hanwen, BAO Zheng. L1 -norm Method for Multi-baseline InSAR Phase Unwarpping [J] . Journal of Xidian University, 2013, 40(4): 37-4 1.[4]靳峰,冯大正.一种快速准确的图像配准算法L J].西安电子科技大学学报,2015, 42(6): 88-93.JIN Feng,FENG Dazheng. Fast and Precise Image Registration Algorithm [J] . Journal of Xidian University, 2015, 42(6) :88-93.[5] HAN Y, BOVOLO F,BRUZZONE L. Segmentation-based Fine Registration of Very High Resolution MultitcmporalImages[J] •Transactions on Geoscience and Remote Sensing, 2017,55(5) :2884-2897.[6] KRIEGER G,M OREIR八八,FIEDLER H,ct al. TanI)EM-X_: a Satellite Formation for High-resolution SARIntcrfcromctry[J] ■i m Transactions on Geoscience and Remote Sensing,2007,45(11):331 7-334 1 .[7] STONE H S,ORCH八RD M T,CH ANG E C,ct al■八Fast Direct Fouricr-basccl 八lgorithm for Subpixcl Registrationof Images [J] •Transactions on Geoscience and Remote Sensing, 2001,39(10) :2235-224 3.[8]薛海伟,冯大正.一种快速的]n S A R图像精配准方法[J].西安电子科技大学学报,2016,43(3) : 172-178.XUE Haiwei, FP'NG Dazheng. Fast Subpixcl Registration Method for InS 八R Images [J] ■Journal of Xidian University, 2016, 43(3) :172-178.[9] SUN K, LIU L M, T A O W Image Matching via Feature Fusion and Coherent Constraint [J] . Geoscience andRemote Sensing Letters, 2017, 14(3):289-293.[10] FAN J W,W U Y,W AN G F, ct al. New Point Matching 八lgorithm Using Sparse Representation of Image PatchFeature for SAR Image Registration [J] ■Transactions on Geoscience and Remote Sensing, 2017,55 (3):1498-1510.[11] NITTI I) (:),HANSSKN R F,REFICK:八,ct al. Impact of DKM-assisted Coregistration on High-resolution SARInterferometry [J] ■IEEE Transactions on Geoscience and Remote Sensing, 2011,49(3) :1 127-1 143.[12] SANSOSTI K,BERARDINO P,M A N U N T八M,ct al. Geometrical S八R Image Registration [J] •IP D: Transactions onGeoscience and Remote Sensing, 2006, 44C10):2861-2870.[13]刘艳阳,李真芳,杨娟娟,等.分布式卫星In S A R目标定位近似闭式解[J].西安电子科技大学学报,2012, 39 (4 ):87-93.LIU Yanyang, LI Zhenfang, YAN G Juanjuan, ct al. Quasi-closcd-form Solution for Distributed Satellites InSAR Gcolocation[J] . Journal of Xidian University, 2012, 39(4 ):87-93.[1.4]李锦伟,李真芳,侯英龙,等.基于递推公式的星载S A R高效正向定位算法□].电子与信息学报,2014, 36 (2):409-4 14.LI Jinwei, LI Zhenfang, HOU Yinglong, ct al.八Novel Efficient Spaccbornc S八R Gcolocation Method Based on Recursion Formulac[J] . Journal of P'lcctronics & Information Technology, 2014, 36(2):409-4 14.(编辑:齐淑娟)。