采用PC_104的排爆机器人嵌入式控制系统实现
基于PC104的电动投弹器检测系统电路设计与实现

端 口完 成 ,信 号 显 示 系 统 将 显 示 的 信 息 输 入 到 液 晶 控 制 器 ,
由液 晶 控 制 器 实 现 显 示 的控 制 。 。
1 检 测 系统 电 路 的 功 能
P /0 C 1 4在 国际 上 十分 流行 。被 I E E E协 会 定 义 为 I E — E E P 9 .。I E — 9 6是 P 9 61 E E P 9 C和 P / T工 业 总 线 规 范 , 一 种 优 CA 是 化 的 、 型 堆 栈 式 结 构 的嵌 入 式 控 制 系 统 , 应 于 携 便 的 测 小 适
p i cp ea d s o n sme h d wi o f mig t es e i cp a t a r g a r i l n h wi gi to , t c n i n p c f r ci l o r m,c mp e et ef n t n f h i u t e in; n t h r h i c p o lt u c o so ecr i d s h i t c g
Usn p c a t r c h p c mb n d w t L t o e l e t e b si tra eP g e me t n el gc c n rl i gs e i i e a e c i o i e i CP D meh d t r a i u ne c C 1 a r e n ,a d t o i o t l n f h o z h f 4 0 h o
crut ic i;Dee t nsse i ea ta s rc s ic ic nsa l r ,me t gted s nrq i me t d x tci ytm t cu t t o escrut a tbewok o nh l e p ei ei ur n h g e e ns n e . i
嵌入式技术基础知识介绍

PC/104,PC/104+,PCI-104嵌入式标准在过去的二十多年里,伴随着极大量标准软硬件产品的支持,PC架构产品的应用已远远超出了台式机范畴。
工程师们可以充分降低产品开发成本、技术风险和开发时间,在比过去短得多的时间里将更可靠、更便宜的产品投放市场,迎接市场竞争提出的挑战。
PC/104嵌入式计算机诞生于八十年代末,1992年被正式接纳为IEEE P996.1 标准。
它在90*96mm的规格上集成了PC的大部分功能,一方面继承所有PC资源(100%兼容),另一方面又对普通PC加以改革和重新规划,具有体积小、功耗低、工作温度宽、可靠性高等特点。
PC/104更适合嵌入式控制领域,被大量用于车载系统、机载设备、电力控制、医疗仪器、智能交通、通讯设备、视频监控、军用电子装备等领域。
发展至今,PC/104嵌入式计算机衍生出PC/104(ISA)、PC/104+(ISA+PCI)和PCI-104(PCI)三个相关标准。
图1. PC/104的基本尺寸图2. 各种标准间的相互关系采用超小体积、堆栈式的PC/104嵌入式计算机,使开发人员摆脱“一切从头做起”的窘境,现在终于可以将PC/104系统当成一个“宏器件”嵌入到自己的产品之中了。
图3. PC/104的典型使用方法EPIC嵌入式单板计算机标准EPIC(Embedded Platform for Industrial Computing)是一种标准的、开放的、可扩展的嵌入式单板计算机。
规格为115x165mm,完全支持PC/104、PC/104+及PCI-104标准产品。
EPIC规范于2005年1月被国际PC/104协会接纳并正式发布。
EPIC在比PC/104大一倍的面积上,规划有专门的CPU&电源区域、PC/104模块扩展区域和3个I/0接口扩展区域。
嵌入式PC的设计者们可以采用性能强大的最新CPU技术,集成更多的元件和功能接口,并且继承数以千计的现有PC/104模块资源。
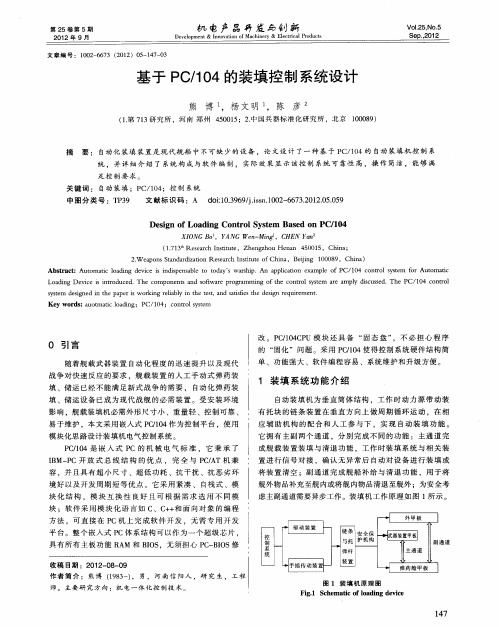
基于PC/104的装填控制系统设计
中图分类 号 :T 3 P9
文献 标识 码 :A d i 03 6 /. s.0 2 6 7 .0 20 .5 o: .9 9ji n10 - 6 32 1 . 0 9 1 s 5
De i n o sg fLoa i d ng Con r s e t olSy t m Bas d e on PC/ 0 14
P /0 C 14是 嵌 入 式 P 的 机 械 电 气 标 准 , 它 秉 承 了 C I M— C 开 放 式 总 线 结 构 的 优 点 . 完 全 与 P / T 机 兼 B P CA
l的
改 。P /0 C U模 块 还 具 备 “ C14 P 固态 盘 ” ,不 必担 心 程 序 “ 固化 ”问题 。采用 P /0 C 14使得 控制 系统硬 件结 构简
第 2 5卷 第 5期
2 2年 9 月 01
机 电 产 品 开 发 与 钊 新
De eo m n & In v t n o a h n r & E e t c l rd c s v lp e t n o ai f o M c iey lcr a o u t i P
V0.5. 5 1 2 NO. Sep , . 201 2
文 章编 号 :1 0 — 6 3 ( 0 2 5 1 7 0 0 2 6 7 2 1 )0 - 4 — 3
基 于 P /0 C 1 4的装填控制 系统设计
熊 博 ,杨 文 明 ,陈 彦
( . 7 3 究 所 ,河 南 郑 州 4 0 1 ;2中 国 兵 器标 准 化 研 究 所 ,北 京 1 0 8 ) 1 第 1研 50 5 . 0 0 9
基于ARM与Linux的排爆机器人控制系统设计
基于ARM与Linux的排爆机器人控制系统设计
杨跃;田联房;王孝洪
【期刊名称】《电子测量技术》
【年(卷),期】2010()3
【摘要】本文针对排爆机器人控制系统价格高昂的现状,提出了一种基于ARM9处理器和嵌入式Linux操作系统的低成本解决方案。
设计了兼容PC104总线的运动控制卡及数据采集卡模块,完成了Linux下的驱动程序和应用程序开发。
机器人可利用电池供电,搭载摄像头,超声探测器等多种传感器设备,通过无线通讯模块进行远程遥控,可工作在复杂环境下拆除易燃易爆物品。
实验结果表明,控制系统具有较高的稳定性和实时性,成本低,易扩展,可满足排爆机器人的应用需求。
【总页数】4页(P79-82)
【关键词】ARM;Linux;排爆机器人
【作者】杨跃;田联房;王孝洪
【作者单位】华南理工大学自动化学院
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于ARM平台的排障机器人控制系统设计 [J], 陈勇;李新建;吕霞付;朱学微
2.基于ARM9和Linux的机器人控制系统设计 [J], 罗磊;戴学丰;刘树东
3.基于单片机的远程排爆救援机器人系统设计 [J], 殷淑婷; 蒋善超
4.基于ARM-Linux的爬壁机器人远程自动控制系统 [J], 何宏;赵磊;张志宏
5.基于ARM-Linux的爬壁机器人控制器研究 [J], 贾云辉;张志宏;何宏
因版权原因,仅展示原文概要,查看原文内容请购买。
机器人控制系统设计
机器人控制系统设计机器人控制系统设计是机器人研发的关键环节之一。
一个优秀的控制系统可以确保机器人能够准确地感知环境、自主决策、有效地执行任务,提高机器人的整体性能和智能化水平。
本文将从以下几个方面探讨机器人控制系统设计。
一、引言随着人工智能技术的不断发展,机器人已经广泛应用于生产、生活、医疗等诸多领域。
机器人控制系统是机器人的核心部分,它负责接收传感器输入的信息,根据预设的程序或算法进行处理,并产生相应的控制信号,以控制机器人的行动。
因此,设计一个性能优良的机器人控制系统,对于提高机器人的智能化水平和工作效率具有至关重要的意义。
二、系统架构机器人控制系统的架构通常包括以下几个主要组成部分:1、传感器接口:用于接收来自传感器的信息,包括环境感知、自身状态等传感器数据。
2、信息处理单元:对接收到的传感器数据进行处理和分析,提取有用的信息以供控制系统使用。
3、决策单元:根据信息处理单元输出的信息,做出相应的决策和控制指令。
4、执行器:接收决策单元发出的控制信号,驱动机器人执行相应的动作。
5、电源管理单元:负责整个控制系统的电源供应,确保系统的稳定运行。
这些组成部分通过一定的通信协议和接口相互连接,形成一个完整的控制系统架构。
三、算法设计机器人控制系统的算法设计是实现系统功能的核心环节。
根据不同的控制需求,需要选择和设计合适的算法。
以下是一些常用的算法:1、决策算法:根据机器人的感知数据和预设规则,做出相应的决策和控制指令。
常见的决策算法包括基于规则的推理、模糊逻辑等。
2、路径规划算法:在给定起点和终点的情况下,计算出机器人从起点到终点的最优路径。
常用的路径规划算法包括基于搜索的方法(如A*算法)、基于网格的方法(如Dijkstra算法)和基于启发式的方法(如遗传算法)等。
3、运动控制算法:根据机器人的运动学模型和动力学模型,控制机器人的运动轨迹和姿态。
常用的运动控制算法包括PID控制、鲁棒控制、自适应控制等。
排爆机器人设计项目说明书
排爆设计项目说明书排爆设计项目说明书项目背景:随着恐怖主义威胁的不断加剧,排爆工作的重要性日益凸显。
此项目旨在设计一款能够准确、快速、安全地排除爆炸物的,以保障公众的安全。
目标:本项目的目标是设计一个功能强大的排爆,具备以下特点:1. 可以实时获取并分析附近的环境数据,包括气体浓度、温度等,以提供工作人员准确的信息;2. 具备高精度的移动能力,可以在狭窄的环境中穿行;3. 能够远程操控,避免工作人员直接接触危险区域;4. 整合多种传感器,能够检测并排除各种类型的爆炸物。
主要章节1. 引言1.1 项目背景1.2 项目目标1.3 项目范围2. 需求分析2.1 功能需求2.2 性能需求2.3 可靠性需求2.4 安全需求3. 系统架构设计3.1 软件架构设计 3.2 硬件架构设计3.3 通信设计4. 传感器选择与集成 4.1 气体浓度传感器 4.2 温度传感器4.3 视觉传感器4.4 碰撞传感器4.5 其他传感器5. 机械设计5.1 底盘设计5.2 机械臂设计5.3 结构设计6. 控制系统设计6.1 控制算法选择 6.2 动力系统设计6.3 控制器设计7. 用户界面设计7.1 远程操控界面7.2 数据显示界面8. 测试与验证8.1 功能测试8.2 性能测试8.3 安全性测试9. 项目进度计划9.1 里程碑9.2 任务分工9.3 时间安排附件:1. 技术规格书2. 机械设计图纸3. 控制系统电路图法律名词及注释:1. :指能够自主执行任务的自动化装置。
2. 爆炸物:指能够产生破坏性冲击波、热能、毒气或碎片的物质,具有爆炸威力。
3. 排爆:指通过技术手段将爆炸物安全地处理或移除的过程。
PC104概述

第一部分:基础篇PC/104是一种专门为嵌入式系统而设计的工业控制总线,由于它具有体积小巧、可靠性高、功耗低的特点,非常适合嵌入式PC系统的设计使用,因此自上个世纪80年代末诞生以来,得到了广大用户以及嵌入式PC系统制造商的欢迎,近年来发展非常迅猛,用户群已经扩展到航空航天、工业控制、仪器仪表、车辆船舶、铁路系统、石化、采矿、通讯、军事装备等众多应用领域。
PC/104在欧美的应用已经非常成熟,生产厂商众多。
在国内的应用也处于快速发展阶段。
PC/104的发展前景非常看好。
本篇从PC/104的起源和发展讲起,对PC/104和嵌入式系统的关系、PC/104的特点、PC/104的发展前景、国际PC/104协会、PC/104、PC/104+、PCI-104等三个规范的主要内容进行了详细描述,以期使大家对PC/104有一个完整全面的认识。
第一章 PC/104概述第一节嵌入式系统概述一、嵌入式系统的定义关于嵌入式系统的定义一直是一个有争议的话题,存在着不同的看法及观点,这反映了人们由于观察的角度不同,看问题的立足点不一样,因而对嵌入式系统的认识不尽相同。
但从广义的角度来看,嵌入式系统一般是指,“以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统”。
这个定义从广义的角度上把握了嵌入式系统的基本特征,涵盖面较广,为我们认识嵌入式系统的本质,提供了有价值的参考。
要理解嵌入式系统,需要着重把握以下几点:(一)应用特性所有的嵌入式系统都是从特定的应用出发而设计的专门的系统,这就区别于传统的通用型计算机系统。
这一特点决定了嵌入式系统的多样性,因为用户的应用永远是丰富多彩的。
人们从实际应用出发,设计出了形形色色的嵌入式系统,同时也拓展了嵌入式系统广泛的应用领域。
进入后PC时代以来,基于具体应用的嵌入式系统发展风起云涌,波澜壮阔,其应用领域远远超出了通用型计算机系统,而且还在不断拓展。
机器人实验室建设方案详细

机器人实验室建设方案(参考样例)目录第一部分机器人国外发展概况及人才需求分析 (3)1.1机器人国际发展状况.....................................................................................................-3-1.2机器人国发展状况.....................................................................................................-4-1.3机电电器类人才需求分析 (5)第二部分机器人实验室建设规划 (9)2.1基础训练区................................................................................................................. (9)2.1.1 最小机电系统连接与控制实训平台......................................................................................... - 9 -2.1.2 基础提高训练设备................................................................................................... ................ - 10 -2.2综合应用实训区...........................................................................................................-11-2.2.1 多控制四轴码垛机器人系统.................................................................................................- 11 -2.2.2 6 自由度多控制模块化可拆装机器人系统.......................................................................... - 12 -2.2.3 6 自由度弧焊机器人工作站系统..........................................................................................- 13 -2.2.4 6 自由度搬运装配机器人工作站系2.2.5 6 自由度点焊机器人工作站系统(体积较大,可选)....................................................... - 15 -2.2.6 模块化多机器人柔性制造/自动化物流综合实训系统........................................................ - 15 -2.2.7 智能移动机器人................................................................................................... .................. - 16 -2.2.8 AGV 小车................................................................................................... ............................ - 17 -2.3拓展展示区...................................................................................................................-17-2.3.1 仿人形机器人................................................................................................... ...................... - 17 -2.3.2 特种爬壁机器人................................................................................................... .................. - 18 -2.3.3 特种球形机器人................................................................................................... .................. - 18 -2.3.4 可重构并联机器人................................................................................................... .............. - 19 -第三部分机器人机电教学模式探讨 (20)3.1机器人推荐教学模式及教学理念 (20)3.2提供的资料介绍..............................................................................................................-21-3.3校企合作与培训说明.....................................................................................................-21-3.4机器人实验室针对教师与学生教学效果 (21)II第一部分机器人国外发展概况及人才需求分析1.1机器人国际发展状况机器人技术是多学科交叉与综合的高技术,对国民经济和国家安全具有重要的战略意义,具有广阔的应用前景和市场。
基于PC104的嵌入式方舱电站监控系统

基于PC104的嵌入式方舱电站监控系统摘要本文介绍了一种基于PC104实现对方舱电站的监控系统。
通过该系统完成方舱电站内多个监测点的数据采集、计算和整理,与上位机通讯完成对对方舱电站的实时监控和遥控。
关键词PC104;方舱电站;监控;CAN Modbus0 引言方舱电站在供电时,需要实时监测方舱内各部分运行状况,并根据各项监测结果做出相应的自动控制动作和保护动作,如供电输出控制、环境控制等。
本文介绍的嵌入式电站控制系统可以完成电站自动控制、多机协调管理、自动配电等功能。
同时,提供通信网络接口,使电站能通过上位机进行远程控制。
1 系统基本方案图1为电站监控系统硬件框图,上位机可以是普通的PC机,上位机遥控嵌入式电站控制器,而嵌入式电站控制器则遥控多个GPC,GPC与发电机组的传感器、执行器配合,完成单个机组的运行控制及保护功能。
2 电站监控系统硬件设计方案嵌入式电站控制器由几个PC104模块组成:主控模块、数字I/O模块、通讯模块和电源模块。
这几个模块之间通过PC104总线相连,完成信号的连接和传递。
主控模块是嵌入式电站控制系统的核心,所有的数字信号处理都在此模块中进行,数字I/O模块完成数字信号的输入和输出工作,通讯模块完成与上位机的遥控功能,电源模块为嵌入式电站控制系统提供电源,保证在宽电压输入范围内其它的PC104模块能在稳定的电压下工作。
3 电站监控系统控制软件设计电站控制系统的控制软件从功能的角度来划分包括3个程序:上位机控制程序、电站运行协调管理程序和控制单元通讯程序。
1)上位机控制程序上位机控制程序主要是完成与上位机通讯,上位机是用户遥控电站的平台,通过上位机用户可以查询电站的运行状态,控制发电机组的启动、合闸、分闸以及停机等。
与上位机通讯采用CAN总线通讯方式,由通讯模块完成,采用中断控制,及时地接收上位机发送的启动、合闸、分闸及停机等命令。
2)电站运行协调管理程序电站运行协调管理程序包含3个程序:电站运行数据处理程序、多台机组协调管理程序和单台机组运行控制程序。
PC /104总线及其在数据采集中的应用

PC /104总线及其在数据采集中的应用作者:孙海涛来源:《科技资讯》 2011年第25期孙海涛(中国人民解放军92419部队30分队辽宁兴城 125106)摘要:介绍了PC/104系统的特点及其应用技术,给出了基于PC/104的航空绞车数据采集系统中的设计方案。
关键词:PC/104 数据采集嵌入式中图分类号:TP2 文献标识码:A 文章编号:1672-3791(2011)09(a)-0052-01数据采集是计算机应用的主要研究课题之一,在设备的测控及试验研究方面有着广泛的应用。
通常在数据采集系统中,采用专用的单片机系统,这样可以发挥单片机功能较强、抗干扰性好、体积小等优点,但是受专用硬件的限制,只能用于单一的、特定的用途。
通用PC系统比专用的单片机系统更具灵活性,但其使用环境受到限制。
PC/104嵌入式系统正是为适应嵌入式系统高可靠性、小尺寸、低功耗的需求而产生发展起来的。
1 嵌入式PC/104模块嵌入式PC/104模块产生于1987年,模块总线之间的互连使用了104根信号线,所以称为PC/104。
1992年PC/104标准正式发表,称为P996.1紧凑嵌入式PC模块标准。
PC/104设计的着眼点在于小型化、低功耗,采用自栈式、模块化的结构,在硬件和软件上与标准PC体系结构完全兼容,成为嵌入式应用的理想选择。
1.1 PC/104的特点(1)结构小巧紧凑。
PC/104采用模块化设计方法,模块的标准尺寸为:3.6英寸×3.8英寸×0.6英寸。
所有功能板卡均采用金属插针垂直叠接的方式,在各模板间增加支柱级连固定,构成稳定的整体。
(2)功耗低、温度适应范围广。
全部使用CMOS器件,每块模板功耗仅为1W~5W,温度适应范围提高到70℃。
(3)PC/104模块均采用单一的5V电源供,降低了系统对电源的要求,简化了电源设备,提高了电源可靠性。
(4)丰富的PC/104总线标准的外部设备模板,容易进行扩展。
PC104嵌入式计算机在海底大地电磁信号采集中的应用

PC104嵌入式计算机在海底大地电磁信号采集中的应用邓明;白宜诚;陈儒军;李哲;肖建平;邓靖武
【期刊名称】《中南大学学报(自然科学版)》
【年(卷),期】2002(033)006
【摘要】为了观测海底大地电磁数据,设计了海底大地电磁探测仪器的智能化方案,即以性能优良的PC104嵌入式计算机作主控单元,编制采集驱动程序,采用合理的硬件接口电路,在非实时监控的运行环境下采集整个海底大地电磁信号.用该仪器系统能记录水深在100 m以下的极其微弱的海底大地电磁信号测量数据表明,此信号是海底在地球物理场的真实反映.
【总页数】4页(P555-558)
【作者】邓明;白宜诚;陈儒军;李哲;肖建平;邓靖武
【作者单位】中国地质大学,地球物理与信息技术学院,北京,100083;中南大学,信息物理工程学院,湖南,长沙,410083;中南大学,信息物理工程学院,湖南,长沙,410083;中国石油天然气集团公司物,探局仪器总厂,河北,保定,072550;中南大学,信息物理工程学院,湖南,长沙,410083;中国地质大学,地球物理与信息技术学院,北京,100083【正文语种】中文
【中图分类】P318.6
【相关文献】
1.基于ARM的海底大地电磁信号采集系统主控模块改进 [J], 王启宁;杜刚;姜景捷
2.嵌入式计算机模块PC104在工程中的应用 [J], 王少力;吕超
3.海底大地电磁信号采集的技术难点 [J], 邓明;魏文博;谭捍东;金胜;邓靖武
4.ARM嵌入式系统在海底大地电磁信号采集中的应用研究初探 [J], 杜刚;魏文博;姜景捷;杜松
5.海底大地电磁信号采集电路的驱动程序 [J], 张启升;邓明;罗锋;乔德新;陈凯因版权原因,仅展示原文概要,查看原文内容请购买。
PC_104嵌入式系统在控制微机系统中的应用

能、构建和软件设计, 并给出系统的软、硬件框图, 来探讨此类嵌入式模块的应用前景。
关键词:PC/104 控制微机系统 监控台
中图分类号: T P 3 9
文献标识码: A
文章编号:1674-098X(2008)02(a)-0026-02
1 引言 目前 PC/104 嵌入式计算机以其优良的品
质、出色的性能和模块化设计, 在工业控制、 计算机、航空航天、军事、通信、智能仪器仪 表、数据采集等领域得到了广泛应用,并且在 进行系统设计时具有成本低、可靠性高、研制 周期短和配置迅速等突出优点。本设计是利 用 PC/104 嵌入式计算机模块在光电经纬仪 中的应用,结合控制微机进行数据采集和数据 传输, 从而达到实时监测和控制的目的。
由于读者的多类型和复杂型,特别是目前 信息能力较差的人较多,是制约我国用户使用 网上信息资源的主要障碍。因此, 图书馆要 持续地对读者进行多层次多目标的网络知识 培训。可采取直接在图书馆网站上开设培训 课程和直接向读者讲授演示有关检索知识和
检索技能等措施。 4.4 建立读者反馈意见栏目
读者对网络信息资源的利用价值最有发 言权。经常了解、收集读者对专业站点及其 信息资源评价信息,可以把握网络资源的内容 质量、学术水平、编辑质量等, 对筛选和评 价专业网络资源具有极大的帮助。
2 PC/104 嵌入式计算机模块简介 2.1 PC/104 嵌入式计算机概况
P C / 1 0 4 嵌入式计算机由多种基于 P C / 1 0 4 总线的模块组成, 主要有: 主机模块( 含 C P U 、并串口、看门狗以及固态盘等) , 显 示控制模块( 含硬、软盘及各种 C R T 的驱动 器) , 数据采集和控制模块( 含 D I / D O 、D / A 、A / D 和计数器等) 等等。用户可以根据 不同对象的具体要求选用不同种类和数量的 模块, 再通过其堆叠式 P C / 1 0 4 总线, 以很小 的占有空间, 构筑一个小型化, 高可靠性以及 和 PC 机软硬件完全兼容的嵌入式应用系统。
pc 104

PC/104简介PC/104 是一种嵌入式计算平台,提供了紧凑、可扩展的计算解决方案。
它是一种标准化平台,旨在简化嵌入式计算机系统的设计和开发。
PC/104 标准定义了模块化的硬件架构和接口规范,使得开发者能够方便地组装和定制他们的嵌入式系统。
PC/104 标准物理尺寸PC/104 标准规定了模块的物理尺寸以及接口布局。
标准规定了模块的尺寸为90mm x 96mm,而且允许模块的堆叠。
这种堆叠式设计使得 PC/104 可以紧凑地集成多个模块,从而实现多样化的功能。
电气接口PC/104 标准使用了 PC/AT 总线和 ISA 总线作为模块之间的主要通信接口。
这些接口提供了低成本、可靠的数据传输,并允许模块之间进行实时通信。
此外,PC/104 还支持其他接口协议,例如 RS-232、USB 和以太网。
扩展性PC/104 提供了丰富的扩展选项,使得用户可以根据需求定制自己的系统。
用户可以添加各种类型的模块,例如存储模块、通信模块、输入输出模块等,以实现特定的功能。
这种可扩展性使得 PC/104 成为一个非常灵活的嵌入式计算平台。
PC/104 优势可靠性PC/104 模块通常使用工业级组件,并遵循严格的质量标准。
这使得 PC/104 系统具有良好的抗震、抗热和抗尘等能力。
因此,PC/104 平台适用于各种恶劣环境下的应用,例如军事、航空航天和工业控制等领域。
紧凑性由于 PC/104 模块具有固定的物理尺寸并且可以堆叠,PC/104 系统通常比传统的工控机更加紧凑。
这种紧凑性使得 PC/104 成为空间有限的应用的理想选择,例如车载设备、机器人和便携设备等。
易于定制PC/104 提供了丰富的扩展接口和模块化设计,使得用户可以根据自己的需求灵活定制系统。
用户可以选择适合自己应用的模块,并根据需要进行组装和定制。
这种灵活性使得 PC/104 成为适应不同需求的嵌入式应用的理想平台。
兼容性PC/104 平台遵循标准化规范,因此不同厂家的 PC/104 模块之间具有很好的兼容性。
排爆机器人控制系统、方法及使用该方法的排爆机器人[发明专利]
![排爆机器人控制系统、方法及使用该方法的排爆机器人[发明专利]](https://img.taocdn.com/s3/m/95a4160c19e8b8f67d1cb90f.png)
专利名称:排爆机器人控制系统、方法及使用该方法的排爆机器人
专利类型:发明专利
发明人:易军,郑光胜,周伟,张元涛,李太福
申请号:CN201310529413.4
申请日:20131030
公开号:CN103552084A
公开日:
20140205
专利内容由知识产权出版社提供
摘要:一种排爆机器人控制系统,其特征在于,包括上位机遥控平台和下位机控制平台,所述上位机遥控平台包括计算机、服务器、上位机无线射频模块和网络基站;所述下位机控制平台包括下位机无线射频模块、控制器、运动模块、3G网卡、图像处理器、摄像头和信号采集模块。
本发明有益效果在于:机器人体积小型化,性能稳定,无线射频传输距离适中,可多台电脑同时监视或远距离监视。
控制系统布局合理化这样机器人在操作起来的时候不易发生侧翻等事故。
运动模块的运行精度高,结构紧凑,体积较小,越障性能好,三节平台能使排爆机器人在行走过程中保持平稳,动作灵活。
申请人:重庆科技学院
地址:400023 重庆市沙坪坝区大学城东路20号
国籍:CN
代理机构:重庆为信知识产权代理事务所(普通合伙)
代理人:余锦曦
更多信息请下载全文后查看。
排爆机器人手爪柔性控制的一种策略
作者: 杨文勇[1] 富巍[2]
作者机构: [1]厦门城市职业学院,福建厦门361008 [2]厦门理工学院,福建厦门361024出版物刊名: 厦门城市职业学院学报
页码: 37-40页
年卷期: 2013年 第4期
主题词: 排爆机器人 双目立体视觉 图像识别 电流伺服控制 嵌入式PCI04
摘要:针对排爆机器人手爪夹持机构的研制过程中需要解决的问题,采用双目立体视觉识别系统,给出了图像中可疑爆炸物的质量估计与夹持宽度估计;根据爆炸物预抓取部位图像矩阵的列单色灰度差分,给出了爆炸物的表面粗糙度的估计方法。
同时构建了完成排爆机器人手爪柔性控制策略所需的电流伺服控制系统,借助数传电台实现了主控PC机与嵌入式目标机PCI04命令传输。
PC_104嵌入式计算机的应用

PCΠ104嵌入式计算机的应用张广莹 徐丽娜 邓正隆(哈尔滨工业大学 控制科学与工程系)[摘要]PCΠ104嵌入式计算机模块系列为系统设计者们提供了一整套低成本、高可靠性、能迅速配置成产品的结构化模块。
在本文中给出其应用的陀螺寿命试验计算机监测设备中的设计方案,该监测设备用于在长期、连续工作条件下,自动监控多个单自由度陀螺的运转情况,完成寿命试验。
关键词 嵌入式计算机 陀螺寿命试验 计算机监测设备1 引言随着计算机技术的飞速发展,在产品中嵌入微机作为控制器已开始随处可见。
由于PC体系结构的广泛流行,与PC兼容的软件、硬件、外设和开发工具都比其它体系结构更丰富、更便宜,将PC体系结构用于嵌入式应用就意味着能够大幅度地降低开发成本、减少风险及缩短开发周期,而且减少了许多令人头疼的系统维护和技术支持。
为适用于嵌入式控制应用,标准PC体系结构的硬件必须减少体积、降低功耗,提高集成度。
PCΠ104标准满足以上要求,它提供与PC总线在体系结构、硬件和软件上的完全兼容,而且结构紧凑的栈接式模块很适合嵌入式控制应用的独特要求。
由于使用CMOS器件,PCΠ104模块功耗低,不存在散热问题,工作温度范围宽(0℃~70℃);结构坚固,非常紧凑,所占面积只有90ⅹ96mm,超小的体积使安装和携带都很方便;减少了产品部件的数量;由模块构成的系统,直接叠装,无需机箱和底板。
已有的PCΠ104模块为构造嵌入式系统提供了种类繁多的各种构件,它的高集成性和可模块化的结构适用于多种应用。
在本文中给出PCΠ104嵌入式计算机应用在陀螺寿命试验计算机监测设备中的设计方案。
该监测设备用于在长期、连续工作条件下,根据预先设定的条件,自动监控多个单自由度陀螺的运转情况,完成寿命试验。
2 监测设备的组成和功能要求陀螺仪是惯性导航系统中的重要组件,测试其精度和运行可靠性是一项十分重要的工作,尤其是在航天导航应用中,要求陀螺仪连续工作时间往往大于20000小时。
PC/104嵌入式微机上实时多任务控制的实现

PC/104嵌入式微机上实时多任务控制的实现
郭福成;李纲
【期刊名称】《微计算机信息》
【年(卷),期】1998(014)004
【摘要】本文介绍了PC/104嵌入式微机及其开发过程,并在其应用于数字
信号处理的背景下,提出了利用动态任务甸表和串断来实现多任务实时处理的方法。
【总页数】2页(P32-33)
【作者】郭福成;李纲
【作者单位】湖南长沙国防科技大学电子工程学院;湖南长沙国防科技大学电子工
程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.嵌入式实时linux在PC104平台上的实现 [J], 高艳辉;龚华军
2.基于PC104的嵌入式微拉伸台控制系统的研制 [J], 陈代谢;林云生;初明璋;韩立
3.一种可在飞控计算机上应用的嵌入式实时多任务操作系统 [J], 雷杰;文顺安
4.实时多任务操作系统及其嵌入式微处理器性能比较 [J], 肖海桥
5.基于PC/104嵌入式微机的断条自动检测仪 [J], 王晓远;杨光;李桂丹;陈益广
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PC104主板的嵌入式Linux的实现

基于PC104主板的嵌入式Linux的实现
蔡勇;战兴群
【期刊名称】《计算机工程与应用》
【年(卷),期】2004(040)027
【摘要】论文简要介绍了Linux操作系统在嵌入式领域的优势,以及PC104主板的特点.详细说明了嵌入式Linux内核的裁减,通过Linux启动过程的分析说明了Linux文件系统的裁减,介绍了BusyBox、uClibc、MiniGUI等优秀的嵌入式专用软件,以及嵌入式Linux在PC104主板上的移植.最后实现了一个基于PC104主板的可从diskonchip启动的嵌入式Linux.
【总页数】3页(P109-110,221)
【作者】蔡勇;战兴群
【作者单位】上海交通大学信息检测技术与仪器系,上海,200030;上海交通大学信息检测技术与仪器系,上海,200030
【正文语种】中文
【中图分类】TP316
【相关文献】
1.基于PC/104的实时嵌入式Linux系统开发 [J], 冯敏;樊晓光;褚文奎
2.嵌入式Linux下PC/104数据采集模块驱动实现 [J], 吴志勇;鞠传香;郑雯玉
3.基于PC104平台的嵌入式Linux设计 [J], 韦宝泉;陈忠斌;罗杰
4.嵌入式Linux操作系统在PC104上的实现 [J], 马记平;彭楚武;蒙娟;张斌
5.基于PC/104平台嵌入式Linux系统核心定制方法 [J], 刘志勇;吴健
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采用PC/104的排爆机器人嵌入式控制系统实现*钟国梁,蒋梁中(华南理工大学机械与汽车工程学院,广州510640)摘要:机器人控制系统是非线性多变量的控制系统,这对系统的开发提出了更多、更复杂的问题,增加了机器人控制系统的开发难度。
介绍一种基于PC/104计算机机器人控制系统的硬件设计与实现,W i ndo w s CE操作系统的移植,生成可运行于X86的嵌入式控制系统,运行结果表明,该方案效果良好,机器人运动平稳,系统具有很好的鲁棒性和实时性。
关键词:排爆机器人;PC/104计算机;W i ndow s CE操作系统;操作系统移植中图分类号:TP39119文献标识码:A文章编号:1671)3133(2010)04)0119)04R eali zati on of EOD robot e m bedded control syste m based on PC/104Z HONG Guo-liang,JI A NG L i a ng-zhong(Co llege ofM echanical and Auto m oti v e Eng ineeri n g,South Ch i n aU niversity o fTechno logy,Guang zhou510640,China)Abstrac t:R obo t contro l system is non-li near mu lti va riab l e control system s,w hich propose for sy stem p s deve l op m ent a m ore com-p l ex proble m and m ake the robot contro l syste m p s deve l op m ent diffi culty.Introduces a robo t con tro l syste m based on PC/104,i n-c l udi ng hard w are des i gn and i m ple m entati on,W i ndow s CE system po rti ng and co m pil ed i nto a rea-l ti m e syste m running on X86 computer.A pp lica ti on res u lts de m onstrate tha t th i s m ethod m akes good effect:t he robot runs p l ac i d l y,and t he syste m is much ro-bust and rea-l ti m e.K ey word s:explosi ve o rdnance disposa l robots;PC/104;W i ndow s CE;operati ng syste m po rti ng0引言排爆机器人是指代替人到不能去或不适宜去的有爆炸危险等环境中,直接在事发现场进行侦察、排除和处理爆炸物及其他危险品,也可对一些持枪、持械的恐怖分子实施有效攻击的机器人[1]。
它是近年来新兴的机器人学研究的一个新领域,特别是自/9110恐怖袭击事件以来,国内外的一些大公司、大学及科研院所,如美国的R e m o tec公司,i R obot公司,英国的P1W1A llen公司,ABP公司,德国的Te lerob公司,加拿大的Pedsco公司,中科院沈阳自动化研究所,北京航空航天大学,上海交通大学和华南理工大学等,都先后在从事相关系统和技术的研究,并取得了卓有成效的进展。
据联合国调查报告中预计,到2012年底,全球投入使用的排爆机器人将增加到550万台[2]。
与工业机器人注重精密性和高效性相比,排爆机器人更重视实时性和安全可靠性。
排爆机器人的主要功能是执行危险场所观察、爆炸物排查,以及爆炸物的销毁等任务,能在一个复杂的环境中巡视、观察室内环境的变化和发现爆炸物,并及时把探测到的信息用无线或网络的方法通知安全部门,通过无线网络及应用软件,工作人员可以远离危险场所实现对排爆机器人的完全控制。
排爆机器人主要由人机交互与运动控制模块、无线传输模块和图像处理模块三部分组成。
1机器人控制系统结构为提高机器人控制的实时性,将机器人的运动学运算从主控计算机的控制程序中移出,由机器人车载嵌入式计算机PC/104完成,主控机将目标物体基于机器人根坐标系的三维坐标通过无线串口通信传给车载机,车载机定时发送机器人状态数据给主控计算机,因而有利于机器人运动轨迹的规划。
为保证通信的稳定可靠,系统中采用M odbus通信协议。
机器人的运动主要是关节的旋转运动。
机器人伺服控制系统的结构如图1所示,从控制直流电动机119*广东省科技计划基金项目(2004A10403006);华南理工大学高水平大学建设重点项目(B01-D7041010)结构模型上看,机器人有八路直流电动机控制,包括两路机器人小车的直流伺服电动机反馈控制,四路机械臂(腰、大臂、小臂、仰伏手腕)的直流伺服电动机反馈控制,以及两路机器人手爪的直流电动机控制(一路用于旋转手腕,一路用于手爪)。
上、下位机通过数传电台无线通讯装置实现数据信息传输。
现场主控计算机(上位机)给下位机发送控制指令,下位机给上位机机器人控制系统的状态信息等等。
图1 机器人伺服控制系统的结构2 运动控制器硬件设计211 系统总体硬件结构控制系统硬件采用的是盛博科技公司(SBS)的嵌入式PC /104计算机和ADT /652扩展卡。
SC M /SPTb (PC /104)是一款/al-l i n -one 0CP U 模块,具有丰富的通用外部接口,集成了10/100Base -T 以太网接口及高性能图形处理器,同时支持PS /2键盘、PS /2鼠标、I DE 接口、Floppy 接口、两串一并接口、USB 以及W atch -dog 。
板上提供CF 接口卡,可以方便地在CF 卡上安装用户熟悉的操作系统和软件,极大地缩短了软件开发周期。
采用SC M /SPTb 主板作为机器人运动控制器以及整个机器人本体的核心,通过堆栈式PC /104总线易于扩展各种功能控制模块,如运动控制模块、CCD 视频采集模块和无线数据传输模块等。
Sys Expan M odu le /ADT /652作为运动控制扩展接口卡的核心,是基于PC /104的扩展板,其主要功能是数据采集。
通过PC /104总线可将其与PC /104嵌入式系统构成一个高性能的数据采集与控制系统,可减少外围器件,简化系统结构,适用于结构紧凑、高可靠的嵌入式应用。
为了能够满足多电动机的协调控制需求,同时兼顾机器人对控制器体积、重量等的敏感特性,选择了基于PC /104与ADT /652的嵌入式可重构设计方案[3]。
整个运动控制系统以直流伺服电动机作为控制对象,PC /104嵌入式计算机作为主控制器,以ADT /652作为接口卡的核心器件,接口电路还包括总线驱动器74H C244、光耦、MC1413单元(驱动数字信号)和双运算放大电路(驱动模拟信号)等。
通过机器人双目视觉系统向直流电动机驱动器(型号为A ccelus)发送启/停、刹车、方向和速度信号,同时接收并传递电动机行程光电编码器信号,准确地控制机器人的行走与越障。
运动控制器的硬件结构如图2所示。
图2 运动控制器硬件结构该运动控制系统还可以接收并识别摇杆手动控制器的输入信号,使电动机快速运行与换向,从而实现机器人摇控操作。
同时,设计的电路板满足PC /104对小尺寸的要求。
212 直流电动机行走速度控制Acce l u s 直流电动机驱动器提供了接收启/停、刹车、方向和速度信号的标准接口,传统的电动机速度调节多采用直接控制模拟量输出的方法,利用D /A 转换芯片,把数字电压信号转换成模拟电压信号,成本较高,同时,增加了ADT /652的I/O 接口复杂性。
而本系统运用简单的直流电动机电压调速的原理,采用分级调速,控制方式简洁、有效,且降低了成本。
调速系统主要包括ADT /652、模拟开关和双运算放大器。
首先,ADT /652在CP U 的控制下仅需输出两位数字控制信号,经过74HC244驱动和光电隔离后作为CD4051模拟开关的A 、B 控制端输入,+5V 的电压由电阻器分压成八路不同的电压作为CD4051的数据端输入,选通的模拟量经过TL062双运算放大器驱动之后,作为直流电动机驱动器的速度信号,从而调节机器人的行走速度。
3 系统软件移植作为排爆机器人控制器,首先要保证系统的实时120性,因此系统软件采用W i n do w s CE实时操作系统[4]。
该操作系统需要进行移植,才能在硬件平台上运行。
操作系统移植前有一项必须完成的工作是实现一个Boo tl o ader,它类似于PC上的基本输入输出系统B I O S,其功能是硬件初始化,下载并执行操作系统软件。
要实现W i n do w s CE在PC/104平台上的移植,从移植原理上分析,主要是处理好多任务的上下文切换以及在中断服务程序中的任务切换。
从实现技术上分析,主要是设置PC/104上的ATD/652扩展卡的中断控制器和定时器[5,6]。
根据W i n dow s CE的体系结构特点,在移植过程中,需将最底层与处理器相关的代码针对ATD/652的编程结构做相应改动,编写相关的流接口函数,使其完成系统时钟设置、中断管理和任务切换功能。
最后定制出内核并下载到PC/104计算机上。
在W i n do w s CE中,OS操作系统在创建时为每个任务建立并初始化一个堆栈。
当发生中断和任务切换时,把当前任务运行现场保存起来。
当每个任务需要从就绪状态激活到运行状态时,OS又需将所有寄存器从堆栈中弹出。
这样,每个任务分时占用CP U。
而对各个任务来说,每次进入运行状态时,CP U状态都与上次从运行状态退出时完全一样。
因此,在W in-do w s CE的移植过程中,能够正确创建、初始化、保存并恢复各个任务的堆栈,是确保W i n do w s CE任务切换和中断管理顺利完成的关键。
311W i n do w s CE外部中断初始化及中断服务程序的编写首先必须完成CPU的I/O接口和中断的初始化工作,然后再编写中断处理程序。
具体分为四个步骤[7]。
第一步:初始化I/O接口。
在Port_Init()函数中,将光电编码器的A、B两相初始化为下降沿触发的中断。
第二步:添加中断号。
在oa lint r1h文件中添加光电编码器中断向量的宏定义。
代码为:#defi ne SYS I NTR_OED(SYS I NTR_FIR MWARE+20)第三步:添加中断的初始化、禁止和复位等函数,分别在OE M I n terrupt E nable()、OE M I nterrupt D isable()和OE M I nterr upt D one()等函数中加入相关代码。