51系列单片机输出PWM的两种方法
51系列单片机输出PWM的两种方法
51系列单片机输出PWM的两种方法PWM(Pulse Width Modulation,脉宽调制)是一种常用的调制技术,通过改变信号的脉宽来控制输出电平的占空比。
在51系列的单片机中,常用的PWM输出方式有基于定时/计数器和软件实现两种方法。
一、基于定时/计数器的PWM输出方法:在51系列单片机中,内部有多个定时/计数器可用于实现PWM输出。
这些定时/计数器包括可编程定时/计数器T0、T1、T2和看门狗定时器。
1.T0定时/计数器:T0定时/计数器是最简单和最常用的PWM输出方式之一、通过配置T0定时/计数器的工作模式和重装值来实现PWM输出。
具体步骤如下:(1)选择T0的工作模式:将定时/计数器T0设置为工作在16位定时器模式,并使能PWM输出。
(2)设置T0的重装值:通过设定T0的装载值来定义PWM输出的周期。
(3)设置T0的计数初值:通过设定T0的计数初值来定义PWM输出的脉宽。
(4)启动T0定时/计数器:开启T0定时/计数器的时钟源,使其开始计数。
2.T1定时/计数器:T1定时/计数器相对于T0定时/计数器来说更加灵活,它具有更多的工作模式和功能,可以实现更复杂的PWM输出。
与T0定时/计数器类似,通过配置T1的工作模式、装载值和计数初值来实现PWM输出。
3.T2定时/计数器:T2定时/计数器在51系列单片机中的应用较少,但也可以用于实现PWM输出。
与T0和T1不同,T2定时/计数器没有独立的PWM输出功能,需要结合外部中断请求(INT)来实现PWM输出。
二、软件实现PWM输出方法:在51系列单片机中,除了利用定时/计数器来实现PWM输出外,还可以通过软件来实现PWM输出。
软件实现PWM的核心思想是利用延时控制来生成不同占空比的方波信号。
软件实现PWM输出的步骤如下:(1)设置IO口:选择一个适合的IO口,将其设置为输出模式。
(2)生成PWM信号:根据要求的PWM占空比,通过控制IO口的高低电平和延时的时间来生成PWM方波信号。
两种方法教你如何有效地利用51单片机产生PWM波

两种方法教你如何有效地利用 51 单片机产生 PWM
波
89C51 芯片没有自带 PWM 发生器,如果要用 51 来产生 PWM 波就必须 要用软件编程的方法来模拟。方法大概可以分为软件延时和定时器产生两种 方法。下面将逐一介绍。 1 软件延时法 利用软件延时函数,控制电平持续的时间,达到模拟 pwm 的效果。 程序如下: #include sbit pwm=P1; main() { while(1) { pwm=1; delayus(60);//置高电平后 延时 60us,占空比 60% pwm=0; delayus(40); } } void delayus(uint x) { while(x--);
断服务程序中有太多的操作会影响 pwm 波的输出,尤其是除法、取余、浮点 数运算会占用大量的机器周期,应在中断外完成运算。2.2.2 定时器装入初值 的问题。 装入初值不能太接近于定时器的溢出值。如我们使用定时器方式 1,最多 能计 65536 个数,假设我们转入的初值为 65534,那幺定时器计两个数就会 进入中断,这样会使程序紊乱而其他功能无法正常地执行,所以一般要留 50100 个数的裕量。 2.2 定时器工作方式 在定时器工作方式的选择上,可以选择定时器的工作方式 0、1、2 都可以, 本文采用的是工作方式 1,即 16 位定时器,这样可以获得较宽的调频范围。 2.3 定时器初值的计算 设占空比为 α,频率为 f 产生高电平时装入定时器高 8 位的值应为
51单片机——增强型PWM,使用自带PWM发生器
51单片机——增强型PWM,使用自带PWM发生器0. 序之前用定时器做了模拟PWM输出,得到的1k左右波形还行,到10k往上波形就特别难看,又是跳变又是长短不一。
后来在参考手册上面看到stc15w4k系列自带pwm波形发生器,于是整了好久写出来了。
今天因为业务需求要改代码,回头一看,好家伙,都不知道自己写的啥了。
看了一会儿想起来,于是有了此文。
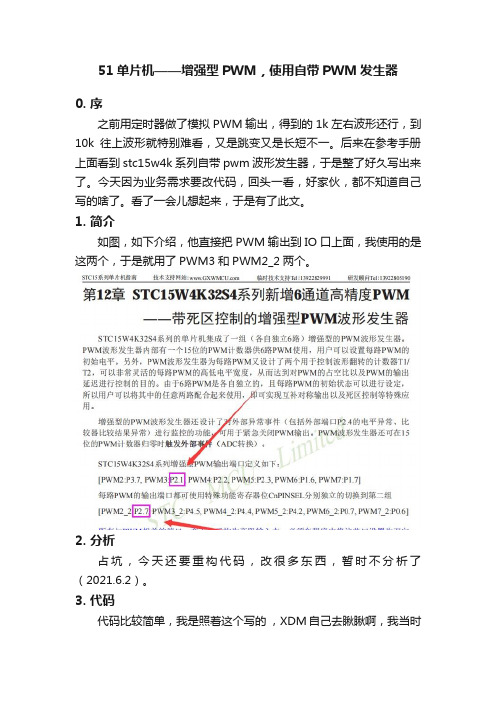
1. 简介如图,如下介绍,他直接把PWM输出到IO口上面,我使用的是这两个,于是就用了PWM3和PWM2_2两个。
2. 分析占坑,今天还要重构代码,改很多东西,暂时不分析了(2021.6.2)。
3. 代码代码比较简单,我是照着这个写的,XDM自己去瞅瞅啊,我当时看了一早上才看明白。
1.#include <STC15.H> //52头文件2.#include <PWM.H>3.4.u8 Tcount=0; //一个PWM周期内的:周期计数,占空比,方向5.sbit PWM = P2^1;//PWM4口6.sbit PWM2 = P2^7; //PWM2口7.sbit NPWM1 =P5^4; //关闭PWM异常口8.sbit NPWM2 =P5^4; //关闭PWM异常口9.void setPWMWide(u8 Wide); //设置脉宽10.11.#define CYCLE 0x800L//5khz //定义PWM周期(最大值为32767)12.#define DUTY1 20 //定义占空比为20%13.#define DUTY2 30 //定义占空比为30%14.#define DUTY3 50 //定义占空比为50%15.16.//主函数17.void InitPWM()18.{19.InterruptInit();//初始化中断配置20.}21.22.void setPWMWide(u8 Wide)23.{24.P_SW2 |= 0x80; //使能访问XSFR25.PWMIF=0x00;26.PWMFDCR = 0x00; //关闭PWM异常检测,P5.4和P5.5在IIC中使用,如果不关闭会一直进入异常导致无法设置PWM占空比27.PWMCFG = 0x00; //配置PWM的输出初始电平为低电平28.PWMCKS = 0x00; //选择PWM的时钟为Fosc/(0+1)29.PWMC = CYCLE; //设置PWM周期30.31.//板子PWM4 芯片PWM2_2 P2.732.// PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数33.// PWM2T2 = CYCLE * DUTY / 100; //设置PWM2第2次反转的PWM计数34.PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数35.PWM2T2 = CYCLE * (Wide) / 100; //设置PWM2第2次反转的PWM计数36.PWM2CR |= 0x08; //选择PWM2输出到P2.7,不使能PWM2中断37.38.PWM3T1 = 0x0000; //设置PWM2第1次反转的PWM计数39.PWM3T2 = CYCLE * (Wide) / 100; //设置PWM2第2次反转的PWM计数40.//占空比为(PWM2T2-PWM2T1)/PWMC41.PWM3CR = 0; //选择PWM2输出到P2.142.43.//使能44.PWMCR = 0x03; //使能PWM信号输出45.PWMCR |= 0x80; //使能PWM模块46.P_SW2 &= ~0x80;47.48.}49.50.void SetPWM(u8 level) //设置风扇等级 1 2 3 4是自动不用管风速51.{52.// PutChar(speedFlag);53.if(level==1) //1是9.8k54.{55.setPWMWide(DUTY1);56.}57.else if(level==2)58.{59.setPWMWide(DUTY2);60.}61.else if(level==3)62.{63.setPWMWide(DUTY3);64.}65.66.}67.68.69.//中断初始化配置70.void InterruptInit()71.{72.73.P2M1 &= 0<<1; //PWM4 P2.1 设置推挽74.P2M0 |= 1<<1;75.P2M1 &= 0<<7; //PWM4 P2.7 设置推挽76.P2M0 |= 1<<7;77.78.PWM=0;79.PWM2=0;80.81.P_SW2 |= 0x80; //使能访问XSFR82.PWMIF=0x00;83.PWMFDCR = 0x00; //关闭PWM异常检测,P5.4和P5.5在IIC中使用,如果不关闭会一直进入异常导致无法设置PWM占空比84.PWMCFG = 0x00; //配置PWM的输出初始电平为低电平85.PWMCKS = 0x00; //选择PWM的时钟为Fosc/(0+1)86.PWMC = CYCLE; //设置PWM周期87.88.//板子PWM4 芯片PWM2_2 P2.789.PWM2T1 = 0x0000; //设置PWM2第1次反转的PWM计数90.PWM2T2 = CYCLE * DUTY1 / 100; //设置PWM2第2次反转的PWM计数91.//占空比为(PWM2T2-PWM2T1)/PWMC92.PWM2CR |= 0x08; //选择PWM2输出到P2.7,不使能PWM2中断93.94.//板子PWM2 芯片PWM3 P2.195.PWM3T1 = 0x0000; //设置PWM2第1次反转的PWM计数96.PWM3T2 = CYCLE * DUTY1 / 100; //设置PWM2第2次反转的PWM计数97.//占空比为(PWM2T2-PWM2T1)/PWMC98.PWM3CR = 0; //选择PWM2输出到P2.199.100.//使能101.PWMCR = 0x03; //使能PWM信号输出102.PWMCR |= 0x80; //使能PWM模块103.P_SW2 &= ~0x80;104.105.}。
PWM电机调速原理及51单片机PWM程序经典

PWM电机调速原理及51单片机PWM程序经典pwm电机调速原理对于电机的转速调整,我们是采用脉宽调制(pwm)办法,控制电机的时候,电源并非连续地向电机供电,而是在一个特定的频率下以方波脉冲的形式提供电能。
不同占空比的方波信号能对电机起到调速作用,这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上,这样,改变在始能端pe2和pd5上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了转速。
此电路中用微处理机去同时实现脉宽调制,通常的方法存有两种:(1)用软件方式来实现,即通过执行软件延时循环程序交替改变端口某个二进制位输出逻辑状态去产生脉宽调制信号,设置相同的延时时间获得相同的充电电流。
(2)硬件实验自动产生pwm信号,不挤占cpu处置的时间。
这就要用到atmega8515l的在pwm模式下的计数器1,具体内容可参考相关书籍。
51单片机pwm程序产生两个pwm,要求两个pwm波形占空都为80/256,两个波形之间要错开,不能同时为高电平!高电平之间相差48/256,pwm这个功能在pic单片机上就存有,但是如果你就要用51单片机的话,也就是可以的,但是比较的麻烦.可以用定时器t0去掌控频率,定时器t1去掌控充电电流:大致的的编程思路就是这样的:t0定时器中断就是使一个i0口输入高电平,在这个定时器t0的中断当中再生制动定时器t1,而这个t1就是使io口输入低电平,这样发生改变定时器t0的初值就可以发生改变频率,发生改变定时器t1的初值就可以发生改变充电电流。
*程序思路说明:****关于频率和占空比的确定,对于12m晶振,假定pwm输出频率为1khz,这样定时中断次数**预设为c=10,即0.01ms中断一次,则th0=ff,tl0=f6;由于预设中断时间为0.01ms,这样**可以设定占空比可从1-100变化。
即0.01ms*100=1ms******************************************************************************* /#include#defineucharunsignedchar/******************************************************************************th0和tl0是计数器0的高8位和低8位计数器,计算办法:tl0=(65536-c)%6;**th0=(65536-c)/256,其中c为所要计数的次数即为多长时间产生一次中断;tmod就是计数器**工作模式挑选,0x01则表示采用模式1,它存有16十一位计数器,最小计数脉冲为65536,最久时**间为1ms*65536=65.536ms******************************************************************************* /#definev_th00xff#definev_tl00xf6#definev_tmod0x01voidinit_sys(void);/*系统初始化函数*/voiddelay5ms(void);unsignedcharzkb1,zkb2;voidmain(void){init_sys();zkb1=40;/*占空比初始值设定*/zkb2=70;/*占空比初始值设定*/while(1){if(!p1_1)//如果按了+键,减少充电电流{delay5ms();if(!p1_1){zkb1++;zkb2=100-zkb1;}}if(!p1_2)//如果按了-键,增加充电电流{delay5ms();if(!p1_2){zkb1--;zkb2=100-zkb1;/*对占空比值限定范围*/if(zkb1>99)zkb1=1;if(zkb1<1)zkb1=99;}}/*******************************************************函数功能:对系统进行初始化,包括定时器初始化和变量初始化*/voidinit_sys(void)/*系统初始化函数*/{/*定时器初始化*/tmod=\th0=v_th0;tl0=v_tl0;tr0=1;et0=1;ea=\}//延时voiddelay5ms(void){unsignedinttempcyc=1000;while(tempcyc--);}/*中断函数*/voidtimer0(void)interrupt1using2{staticucharclick=\/*中断次数计数器变量*/th0=v_th0;/*恢复定时器初始值*/tl0=v_tl0;++click;if(click>=100)click=\if(click<=zkb1)/*当小于占空比值时输出低电平,高于时是高电平,从而实现占空比的调整*/p1_3=0;elsep1_3=1;if(click<=zkb2)p1_4=0;elsep1_4=1;}<1.下面就是avr的程序,51产生pwm波麻烦,可以用avr。
51单片机定时器产生pwm波的程序

51单片机定时器产生pwm波的程序PWM(Pulse Width Modulation)是一种调节脉冲信号宽度的技术,通过改变信号的高电平时间和低电平时间的比例来控制输出电压的大小。
在很多应用中,PWM技术被广泛应用于电机控制、LED调光、音频放大器等领域。
在使用51单片机生成PWM波之前,我们首先需要了解51单片机的定时器的工作原理。
51单片机内部集成了多个定时器,其中最常用的是定时器0和定时器1。
这两个定时器都是16位的,可以通过设定定时器的计数值和工作模式来控制定时器的工作。
在使用定时器0和定时器1生成PWM波之前,我们还需要明确一些概念。
占空比是指高电平时间与一个周期的比值,通常用百分比表示。
频率是指一个周期的时间,单位是赫兹(Hz)。
接下来我们以定时器1为例,介绍如何在51单片机上生成PWM波。
我们需要设置定时器1的工作模式。
定时器1的工作模式分为两种:8位自动重装载模式和16位工作模式。
在8位自动重装载模式下,定时器1的计数器值从0到255,然后自动重装载为初始值,重复计数。
在16位工作模式下,定时器1的计数器值从0到65535,然后自动重装载为初始值,重复计数。
在生成PWM波时,我们通常使用16位工作模式。
我们需要设置定时器1的计数值。
定时器1的计数值决定了PWM波的频率。
计数值越大,频率越低;计数值越小,频率越高。
我们可以根据具体的应用需求来设定计数值。
然后,我们需要设置定时器1的占空比。
占空比决定了PWM波的高电平时间与低电平时间的比例。
占空比为50%时,高电平时间和低电平时间相等;占空比小于50%时,低电平时间多于高电平时间;占空比大于50%时,高电平时间多于低电平时间。
我们可以通过改变定时器1的占空比来控制PWM波的输出电压的大小。
我们需要启动定时器1开始工作。
定时器1开始工作后,会自动根据设定的计数值和占空比生成相应的PWM波。
使用51单片机定时器生成PWM波的步骤如下:1. 设置定时器1的工作模式为16位工作模式;2. 设定定时器1的计数值,确定PWM波的频率;3. 设定定时器1的占空比,确定PWM波的输出电压的大小;4. 启动定时器1开始工作。
如何利用51单片机输出PWM波

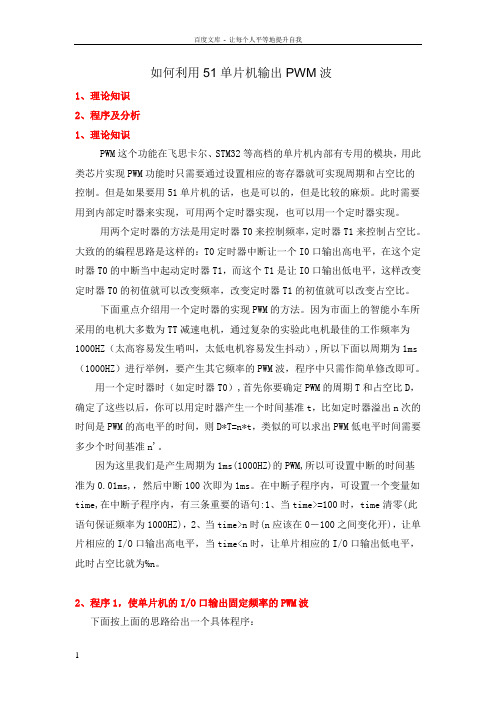
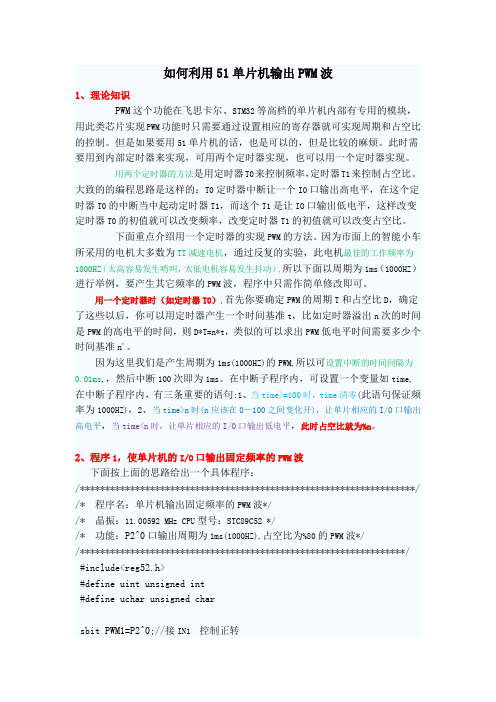
如何利用 51 单片机输出 PWM 波1、理论知识PWM 这个功能在飞思卡尔、等高档的单片机内部有专用的模块,STM32用此类芯片实现 功能时只需要通过设置相应的寄存器就可实现周期和占空比PWM的控制。
但是如果要用 51 单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法 是用定时器 T0来控制频率,定时器 T1 来控制占空比。
大致的的编程思路是这样的: T0 定时器中断让一个 I0 口输出高电平,在这个定时器T0 的中断当中起动定时器,而这个 T1是让IO 口输出低电平,这样改变T1定时器 T0 的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现的方法。
因为市面上的智能小车PWM所采用的电机大多数为TT 减速电机 ,通过反复的实验,此电机 最佳的工作频率为1000HZ (太高容易发生哨叫,太低电机容易发生抖动) ,所以下面以周期为()1ms1000HZ进行举例,要产生其它频率的波,程序中只需作简单修改即可。
PWM用一个定时器时(如定时器T0) , 首先你要确定 的周期T 和占空比,确定PWMD了这些以后,你可以用定时器产生一个时间基准 t ,比如定时器溢出 n 次的时间是 PWM 的高电平的时间, 则 D*T=n*t ,类似的可以求出 PWM 低电平时间需要多少个时间基准 n' 。
因为这里我们是产生周期为 1ms(1000HZ)的 PWM,所以可 设置中断的时间间隔为0.01ms, ,然后中断 100 次即为 1ms 。
在中断子程序内,可设置一个变量如 time,在中断子程序内, 有三条重要的语句 :1 、当 time>=100 时, time 清零 ( 此语句保证频率为1000HZ) , 、I/O 口输出2 当 time>n 时(n 应该在 0- 100 之间变化开 ) ,让单片相应的高电平 ,当 time<n 时,让单片相应的 I/O 口输出低电平,。
如何利用单片机输出PWM波

如何利用51单片机输出PWM波1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms(1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间间隔为,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n 时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /*程序名:单片机输出固定频率的PWM波*//*晶振: MHz CPU型号:STC89C52 *//*功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1控制正转sbit PWM2=P2^1;//接IN2控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//EA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//TR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;程序说明:1、关于频率的确定:对于晶振,PWM输出频率为1KHZ,此时设定时器中断一次,时中断次数100次即为1KHZ( *100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
如何利用51单片机输出PWM波
如何利用51单片机输出PWM波1、理论知识2、程序及分析1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过复杂的实验此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms (1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间基准为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/ #include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振, PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
如何基于51单片机利用定时器的实现PWM的方法详细概述
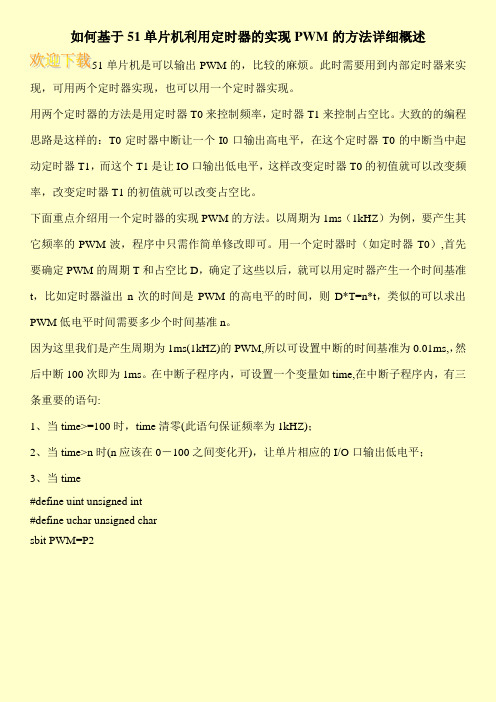
如何基于51单片机利用定时器的实现PWM的方法详细概述51单片机是可以输出PWM的,比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
以周期为1ms(1kHZ)为例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先要确定PWM的周期T和占空比D,确定了这些以后,就可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n。
因为这里我们是产生周期为1ms(1kHZ)的PWM,所以可设置中断的时间基准为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:
1、当time>=100时,time清零(此语句保证频率为1kHZ);
2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出低电平;
3、当time
#define uint unsigned int
#define uchar unsigned char
sbit PWM=P2。
51单片机实现PWM波占空比可调
51单片机实现PWM波占空比可调单片机实现PWM波占空比可调的方法有很多种,下面将详细介绍一种常见的实现方式。
PWM(脉冲宽度调制)是一种常用的数字信号调制技术,可以通过改变脉冲的高电平时间来控制电平的占空比,从而实现对信号的调节。
在单片机中,可以使用定时器/计数器模块来生成PWM波,并通过改变计数器的值来调整占空比。
以AT89C51单片机为例,以下是实现PWM功能的步骤:1.设置定时器模式:选择合适的定时器模式来生成所需的PWM信号。
AT89C51单片机有定时器/计数器模块,可以选择模式2,该模式下定时器有自动重装载功能,能够方便地实现周期性的PWM波。
3. 设置PWM参数:根据需要调节的占空比,计算出所需的高电平时间和低电平时间。
通常,PWM波的高电平时间与低电平时间之和等于一个周期的时间(定时器的重装载值)。
例如,如果需要一个占空比为60%的PWM波,周期为20ms,则高电平时间为「20ms * 60% = 12ms」,低电平时间为「20ms - 12ms = 8ms」。
4.设置PWM引脚:选择一个合适的IO口作为PWM波的输出引脚,并在程序中设置该引脚为输出模式。
5.编写中断服务程序(ISR):针对定时器溢出中断(TOF)编写中断服务程序。
每当定时器溢出时,PWM波应该翻转输出引脚的电平,以实现所需的占空比。
6.初始化定时器和中断:在程序初始化阶段,将定时器设为所需的模式,设置中断向量表中的对应中断服务函数,并开启定时器中断。
7.主循环中设置占空比:在主循环中,通过改变定时器的初值来实现不同占空比的调节。
将计算得到的高电平时间和低电平时间分别赋值给定时器初值,即可实现占空比的调整。
通过上述步骤,我们可以实现占空比可调的PWM波。
在实际应用中,可以根据需要进行适当的优化和改进,例如增加输入口的设置,使得用户可以通过外部按键或旋钮来实时调整占空比,从而更加灵活地控制PWM波的输出。
总结:通过合适的定时器模式、初值设置和中断服务程序编写,配合适当的IO口配置和占空比计算,我们可以在单片机中实现占空比可调的PWM波。
51系列单片机输出PWM的两种方法
51系列单片机输出PWM的两种方法51系列单片机(如STC89C52、AT89C51等)是一种常用的8位微处理器,具有较高的性价比和广泛的应用领域。
PWM(Pulse Width Modulation)是一种常用的模拟信号生成技术,在很多领域中都有广泛应用,比如电机控制、LED调光等。
在51系列单片机中,有两种常用的方法可以实现PWM输出,分别是软件实现PWM和硬件实现PWM。
下面将详细介绍这两种方法及其实现方式。
1.软件实现PWM软件实现PWM是通过定时器和IO口的相互配合来产生PWM信号。
具体实现的步骤如下:步骤1:设置定时器的工作模式和计数器初值。
选择一个合适的定时器,比如定时器0,然后设置定时器工作模式和计数器初值。
定时器的工作模式选择“模式1”或“模式2”,并根据需求设置计数器初值。
步骤2:设置IO口的工作模式。
选择一个合适的IO口,比如PWM输出口(如P1.2),然后将该IO口设置为输出模式。
步骤3:编写软件控制代码。
在主循环中,通过改变IO口的电平状态来实现PWM输出。
根据定时器的计数值,可以确定PWM信号的占空比大小。
当定时器计数值小于一些阈值时,将IO口置高电平;当定时器计数值大于该阈值时,将IO口置低电平。
通过改变该阈值,可以实现不同的PWM占空比。
通过上述步骤,就可以实现软件控制的PWM输出。
需要注意的是,软件实现PWM的精度较低,同时也会占用较多的处理器时间。
2.硬件实现PWM硬件实现PWM是通过专门的PWM模块或专用的计时电路来实现PWM输出。
具体实现的步骤如下:步骤1:选择一个合适的PWM模块或计时电路。
可以选择专门的PWM模块(如PCA模块)或计时电路(如555计时芯片),根据需求选择合适的硬件模块。
步骤2:设置PWM模块或计时电路的相关参数。
根据需求设置PWM频率、占空比等参数。
步骤3:连接并配置IO口。
将PWM模块或计时电路的输出引脚连接到需要输出PWM信号的IO口,然后将该IO口设置为输出模式。
如何利用51单片机输出PWM波
如何利用51单片机输出PWM波51单片机可以通过改变IO口的高低电平来生成PWM波,具体的实现方法如下:1.配置IO口:将需要生成PWM波的IO口配置为输出模式,例如P2口。
2.设置定时器:使用一个定时器来控制PWM波的周期,定时器可以选择定时器0(T0)或定时器1(T1),这里以定时器1为例。
a.初始化定时器1的模式为工作模式1,即16位自动重装载模式。
b.设置计数初始值,决定PWM波的频率。
c.启用定时器1中断,并设置中断优先级。
3.设置占空比:通过改变定时器1的重装载值来改变PWM波的占空比。
占空比可通过一个8位变量来控制,变量的取值范围为0-255b.将重装载值低8位保存到TH1寄存器,高8位保存到TL1寄存器。
4.启动定时器:将定时器1的运行控制位TR1置1,定时器1开始工作。
5.通过IO口输出PWM波:在定时器1中断服务子程序中,将IO口(P2口)的数据按照占空比的大小设置为高电平或低电平。
6. 循环运行:通过主程序中的无限循环(while(1))来持续生成PWM波。
以上就是使用51单片机输出PWM波的基本原理和实现步骤,下面是一个简单的示例代码:#include <reg52.h>//定义PWM波的频率和占空比#define PWM频率 1000 // PWM波的频率为1kHz #define 占空比系数 128 // PWM波的占空比为50% //定义函数和变量void 初始化定时器1(;void 初始化IO口(;void 主程序(;void main初始化定时器1(;初始化IO口(;while (1)主程序(;}void 初始化定时器1//设置定时器1的模式和计数初值TMOD,=0x10;//工作模式1TL1=TH1;//启用定时器1中断,并设置中断优先级ET1=1;//启用定时器1中断EA=1;//启用总中断PT1=1;//定时器1中断优先级为高void 初始化IO口//将P2口配置为输出模式P2=0x00;P2 = 0xff;void 主程序//在定时器1中断服务子程序中,设置P2口的输出//定时器1中断服务子程序void Timer1_ISR( interrupt 3//根据占空比的大小来设置P2口的输出if (TH1 > 占空比系数)P2 = 0xff;} elseP2=0x00;}在主程序中,需要完成具体的PWM波的生成操作,可以在定时器1中断服务子程序中根据占空比的大小来设置输出的高低电平。
如何利用51单片机输出PWM波
如何利用51单片机输出PWM波1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms(1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间间隔为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振,PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
51单片机PWM波输出

T占空比:如图PWM波所示,在一周期内t/T的比值称为占空比利用51单片产生PWM波方案:单片机使用资源:定时器0,定时器1,工作模式2(8位溢出自动重装初值)当定时器1溢出时,置位输出I/O,并停止自己计时,当定时器0溢出时,对输出I/O口清0,并打开定时器1,如此反复动作,这种模式有点像ATMEGA16单片机的快速PWM模式,都是通过中断自行操作的,而51单片机没有此功能,只能通过软件实现,改变定时器1即可改变占空比,程序如下:#include<reg51.h>sbit out=P3^0;//频率输出引脚1sbit or_out=P3^1;//频率输出引脚2,与引脚1相位相差180度/*初始化子程序**********************************************/void inti(){out=or_out=0;//初始化输出I/O,将其清0TMOD=0x22;//设置两个定时器,工作方式2,即8位自动重装TL0=206;//TL0=256-t*fosc/12=255-1/20KHz*12/12MHz=256-50*1us=206,定时期0工作模式2下TL0作为计数器,定时器0 50ms溢出一次并自动重装TH0=206;//定时期0工作模式2下TH0作为自动重装初值,即TL0溢出时,TH0中的数据自动重装到TL0中TL1=223;//定时器1装初值TH1=223;//定时器1重装值设定ET0=1;//开定时器0中断ET1=1;//开定时器1中断EA=1;//开总中断TR0=TR1=1;//启动定时器0和1}/*主程序****************************************************/void main(){inti();while(1);}/*定时器0中断服务程序**************************************/ void T0_time() interrupt 1{out=0;//定时器0有溢出就将out清0or_out=1;TR1=1;//溢出后打开定时器1}/*定时器1中断服务程序**************************************/ void T1_time() interrupt 3{out=1;//定时器1有溢出就将out置1or_out=0;TR1=0;//溢出后关闭自己}。
51单片机产生PWM波

69.2
2
71,30
1058
69.6
3
73,30
1038
70.2
4
74,31
1019
69.9
5
76,32
992
69.0
6
76,31
1001
70.0
频率相对误差(%) 6.8 5.8 3.8 1.9 0.8 0.1
总结:定时器理论初值为(65536-100)时,中断一次的时间为 100Us,
而执行一条语句时间为 1~4Us,这样会使 T 变大,f 减小,误差较大;
main() {
Init(); while(1) {
if(num<=8)output=1; else output=0; } }
//使占空比为 7:3
void Timer_0(void) interrupt 1 //中断函数
{
TH0=(65536-n)/256; //(65536-n)为定时器初值
TL0=(65536-n)%256;
51 单片机产生PWM方波
//利用定时器产生频率为 1KHz,占空比为 7:3 的 PWM 方波
#include<reg52.h> //头文件
sbit output=P1^1; //输出端
unsigned char num=1; //辅助计时
void Init(void) //初始化函数 {
TMOD=0x01; TH0=(65536-n)/256; //(65536-n)为定时器初值 TL0=(65536-n)%256; EA=1; ET0=1; TR0=1; }
频率相对误差(%) 12 3.7 1.4 0.8 0.2
(完整版)如何利用51单片机输出PWM波
如何利用51单片机输出PWM波1、理论知识PWM这个功能在飞思卡尔、STM32等高档的单片机内部有专用的模块,用此类芯片实现PWM功能时只需要通过设置相应的寄存器就可实现周期和占空比的控制。
但是如果要用51单片机的话,也是可以的,但是比较的麻烦。
此时需要用到内部定时器来实现,可用两个定时器实现,也可以用一个定时器实现。
用两个定时器的方法是用定时器T0来控制频率,定时器T1来控制占空比。
大致的的编程思路是这样的:T0定时器中断让一个I0口输出高电平,在这个定时器T0的中断当中起动定时器T1,而这个T1是让IO口输出低电平,这样改变定时器T0的初值就可以改变频率,改变定时器T1的初值就可以改变占空比。
下面重点介绍用一个定时器的实现PWM的方法。
因为市面上的智能小车所采用的电机大多数为TT减速电机,通过反复的实验,此电机最佳的工作频率为1000HZ(太高容易发生哨叫,太低电机容易发生抖动),所以下面以周期为1ms(1000HZ)进行举例,要产生其它频率的PWM波,程序中只需作简单修改即可。
用一个定时器时(如定时器T0),首先你要确定PWM的周期T和占空比D,确定了这些以后,你可以用定时器产生一个时间基准t,比如定时器溢出n次的时间是PWM的高电平的时间,则D*T=n*t,类似的可以求出PWM低电平时间需要多少个时间基准n'。
因为这里我们是产生周期为1ms(1000HZ)的PWM,所以可设置中断的时间间隔为0.01ms,,然后中断100次即为1ms。
在中断子程序内,可设置一个变量如time,在中断子程序内,有三条重要的语句:1、当time>=100时,time清零(此语句保证频率为1000HZ),2、当time>n时(n应该在0-100之间变化开),让单片相应的I/O口输出高电平,当time<n时,让单片相应的I/O口输出低电平,此时占空比就为%n。
2、程序1,使单片机的I/O口输出固定频率的PWM波下面按上面的思路给出一个具体程序:/*******************************************************************/ /* 程序名:单片机输出固定频率的PWM波*//* 晶振:11.00592 MHz CPU型号:STC89C52 *//* 功能:P2^0口输出周期为1ms(1000HZ),占空比为%80的PWM波*//*****************************************************************/#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit PWM1=P2^0;//接IN1 控制正转sbit PWM2=P2^1;//接IN2 控制反转uchar time;void main(){TMOD=0x01;//定时器0工作方式1TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msEA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0while(1){}}void delay(uint z){uint x,y;for(x=z;x>0;x--)for(y=500;y>0;y--);}void tim0() interrupt 1{TR0=0;//赋初值时,关闭定时器TH0=0xff;//(65536-10)/256;//赋初值定时TL0=0xf7;//(65536-10)%256;//0.01msTR0=1;//打开定时器time++;if(time>=100) time=0;//1khzif(time<=20) PWM1=0;//点空比%80else PWM1=1;PWM2=0;}程序说明:1、关于频率的确定:对于11.0592M晶振,PWM输出频率为1KHZ,此时设定时器0.01ms中断一次,时中断次数100次即为1KHZ( 0.01ms*100=1ms,即为1000HZ)此时,定时器计数器赋初值为TH0=FF,TL0=F7。
51单片机输出PWM的两种方法
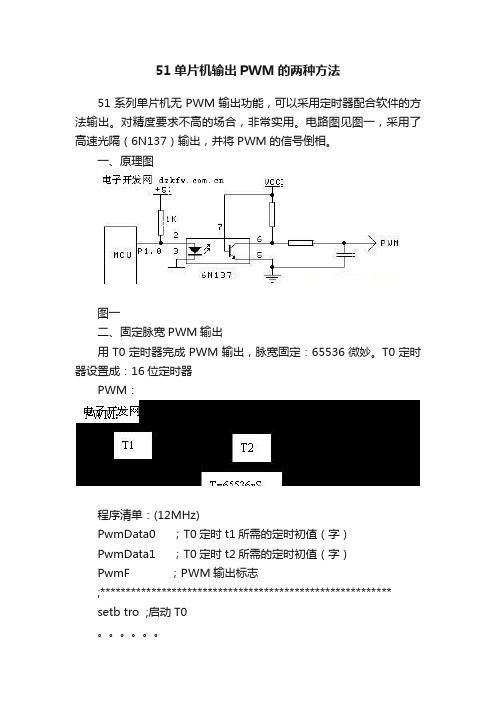
51单片机输出PWM的两种方法51系列单片机无PWM输出功能,可以采用定时器配合软件的方法输出。
对精度要求不高的场合,非常实用。
电路图见图一,采用了高速光隔(6N137)输出,并将PWM的信号倒相。
一、原理图图一二、固定脉宽PWM输出用T0定时器完成PWM输出,脉宽固定:65536微妙。
T0定时器设置成:16位定时器PWM:程序清单:(12MHz)PwmData0 ;T0定时t1所需的定时初值(字)PwmData1 ;T0定时t2所需的定时初值(字)PwmF ;PWM输出标志;*********************************************************setb tro ;启动T0。
T0Int:;T0中断服务程序JB PwmF ,PwmOutH ;PWM输出未完成返回Mov TH0,High(PwmData0)Mov TL0,Low(PwmData0)Setb tr0Setb PwmFClr p1.0 ;PWM输出脚retiPwmOutH:Setb p1.0Clr tr0Mov TH0,High(PwmData1)Mov TL0,Low(PwmData1)Setb tr0Clr PwmFreti说明:在主程序中计算PwmData0、PwmData1的值。
三、可变脉宽PWM输出用T0定时器控制PWM的占空比,T1定时器控制脉宽(最大:65536微妙)。
T0、T1定时器设置成:16位定时器。
程序清单:(12MHz)PwmData0 ;T0定时t1所需的定时初值(字)PwmData1 ;T1定时T所需的定时初值(字);********************************************************* setb tro ;启动T0setb tr1。
T0Int:;T0中断服务程序Clr tr0setb p1.0 ;PWM输出脚retiT1Int:;T1中断服务程序Clr p1.0Clr tr0Clr tr1Mov TH0,High(PwmData0)Mov TL0,Low(PwmData0)Mov TH1,High(PwmData1)Mov TL1,Low(PwmData1)Setb tr1Setb tr0reti说明:在主程序中计算PwmData0、PwmData1的值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51系列单片机输出PWM的两种方法
51系列单片机无PWM输出功能,可以采用定时器配合软件的方法输出。
对精度要求不高的场合,非常实用。
电路图见图一,采用了高速光隔(6N137)输出,并将PWM的信号倒相。
一、原理原理图
图一
二、固定脉宽PWM输出
用T0定时器完成PWM输出,脉宽固定:65536微妙。
T0定时器设置成:16位定时器
PWM:
程序清单:(12MHz)
PwmData0 ;T0定时t1所需的定时初值(字)
PwmData1 ;T0定时t2所需的定时初值(字)
PwmF ;PWM输出标志
;*********************************************************
setb tro ;启动T0。
T0Int:;T0中断服务程序
JB PwmF ,PwmOutH ;PWM输出未完成返回
Mov TH0,High(PwmData0)
Mov TL0,Low(PwmData0)
Setb tr0
Setb PwmF
Clr p1.0 ;PWM输出脚
reti
PwmOutH:
Setb p1.0
Clr tr0
Mov TH0,High(PwmData1)
Mov TL0,Low(PwmData1)
Setb tr0
Clr PwmF
reti
说明:在主程序中计算PwmData0、PwmData1的值。
三、可变脉宽PWM输出
用T0定时器控制PWM的占空比,T1定时器控制脉宽(最大:65536微妙)。
T0、T1定时器设置成:16位定时器。
程序清单:(12MHz)
PwmData0 ;T0定时t1所需的定时初值(字)
PwmData1 ;T1定时T所需的定时初值(字);*********************************************************
setb tro ;启动T0
setb tr1。
T0Int:;T0中断服务程序
Clr tr0
setb p1.0 ;PWM输出脚
reti
T1Int:;T1中断服务程序
Clr p1.0
Clr tr0
Clr tr1
Mov TH0,High(PwmData0)
Mov TL0,Low(PwmData0)
Mov TH1,High(PwmData1)
Mov TL1,Low(PwmData1)
Setb tr1
Setb tr0
reti
说明:在主程序中计算PwmData0、PwmData1的值。