基于中央空调管道清扫机器人的设计
中央空调管道清洁机器人的创新设计
中央空调管道清洁机器人的创新设计摘要:本文主要结合国内外的中央空调机器人的发展,讲述课题的意义和背景,其中重点介绍了中央空调管道机器人采用导向轮制作的行走方案和旋转刷的清扫方案。
同时,针对中央空调管道清洁机器人清洁收尾增加了收集装置。
对重点工作和探讨内容进行归纳总结,并对今后的研究方向做出了展望。
关键词:机械设计;中央空调;机器人;电动机;导向轮一、引言近几年来,中央空调管道的不得当清洗引起了重大关注。
由于中央空调管道设备所占面积较大,长期使用后,细菌灰尘会堆积在空调内部,而随着空调送风系统的运行,会将管道中的细菌和灰尘吹到室内,严重影响到室内空气质量,导致人们呼吸和皮肤时常出现问题。
不仅如此,灰尘的堆积导致散热片堵塞,空调的运转时间及电流成本增加,从而导致空调使用寿命减少,由于楼层结构不同,所安装的空调管道也是纵横交错,并且管道直径也会因为空间大小不同,拐角和衔接扣的清理更是人力短时间不能解决的。
因此,清洁机器人的产生不仅可以更高效地对管道进行清扫、消毒,更能够解决人力清洁所带来的不卫生难题。
因此,采用专用的清洁机器人对中央空调管道进行清洗工作。
我国2004年以来尽管研究的很多,但真正成型投入使用的并不是很多,产品和市场不成熟,而国外的相关产品大多功能单一,智能化水平低,价格又昂贵。
因此国内市场一系列低成本、高效率的机器人相继投入市场。
目前,中央空调机器人的发展趋势将是:增加机器人的适应性,能够运用与多种场景。
中央空调管道清洗机器人技术的成熟和其产品的国产化,会进一步提高我们的物资和文化生活,其研究和发展具有广阔的应用前景、重要的社会意义和经济效益二、工作原理本次设计的机器人主要用于空调管道的清洁,大体由行走机构、清扫装置、控制系统组成。
其中行走机构又包括了驱动机构和导向轮系统两个部分,驱动装置主要采用单电机驱动机器人的前轴,通过对支撑臂上的零件进行调节从而调节导向轮的间距,确保机器人在进入管道以后,两个导向轮两端与管道壁保持大约20mm的距离。
中央空调管道清洁机器人的设计

中央空调管道清洁机器人的设计引言随着中央空调系统在建筑中的应用日益广泛,其管道清洁成为一个重要的问题。
传统的清洁方法需要人工操作,耗时耗力且效率低下。
因此,设计一款中央空调管道清洁机器人成为很有必要的一项工作。
本文将介绍中央空调管道清洁机器人的设计理念、构造、工作原理以及未来发展方向。
设计理念中央空调管道清洁机器人的设计理念是基于自动化清洁的原则。
通过引入先进的传感技术和自主导航系统,实现机器人在管道内的自动运行和清洁,减少人工干预。
构造中央空调管道清洁机器人的构造主要包括机器人主体、传感器系统、清洁装置和控制系统。
机器人主体包括主要的动力系统和机械结构,传感器系统用于感知管道内的环境信息,清洁装置用于清洁管道内的污物,控制系统用于实现机器人运行的控制和协调。
工作原理中央空调管道清洁机器人的工作原理是:首先,通过传感器系统获取管道内的信息,包括管道的尺寸、形状和污物情况。
然后,根据获取的信息制定清洁路径,机器人利用清洁装置对管道内的污物进行清洁。
在整个过程中,控制系统实时监控机器人的运行状态,确保其安全和高效地完成清洁任务。
未来发展方向中央空调管道清洁机器人作为一项新兴技术,仍有许多发展方向。
首先,可以进一步完善传感器系统,提高机器人在管道内的感知能力;其次,可以优化清洁装置,提高清洁效率和效果;最后,还可以研究机器人的自主决策能力,使其更加智能化。
结论中央空调管道清洁机器人的设计是为了解决管道清洁的难题,提高清洁效率和质量。
通过不断的改进和创新,相信这一技术将在未来得到更广泛的应用。
以上是对中央空调管道清洁机器人设计的相关介绍,希望能对相关研究和应用有所帮助。
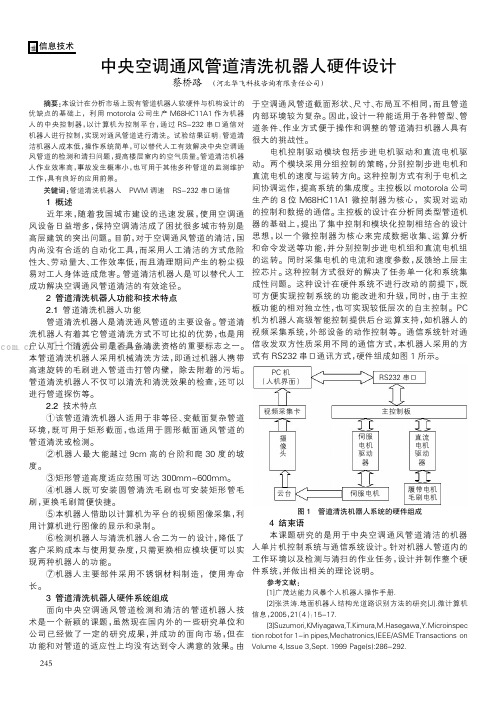
中央空调通风管道清洗机器人硬件设计
中央空调通风管道清洗机器人硬件设计作者:蔡桥路来源:《中小企业管理与科技·中旬刊》2014年第08期摘要:本设计在分析市场上现有管道机器人软硬件与机构设计的优缺点的基础上,利用motorola公司生产M68HC11A1作为机器人的中央控制器,以计算机为控制平台,通过RS-232串口通信对机器人进行控制,实现对通风管道进行清洗。
试验结果证明:管道清洁机器人成本低,操作系统简单,可以替代人工有效解决中央空调通风管道的检测和清扫问题,提高楼层室内的空气质量。
管道清洁机器人作业效率高,事故发生概率小,也可用于其他多种管道的监测维护工作,具有良好的应用前景。
关键词:管道清洗机器人 PWM调速 RS-232串口通信1 概述近年来,随着我国城市建设的迅速发展,使用空调通风设备日益增多,保持空调清洁成了困扰很多城市特别是高层建筑的突出问题。
目前,对于空调通风管道的清洁,国内尚没有合适的自动化工具,而采用人工清洁的方式危险性大、劳动量大、工作效率低,而且清理期间产生的粉尘极易对工人身体造成危害。
管道清洁机器人是可以替代人工成功解决空调通风管道清洁的有效途径。
2 管道清洗机器人功能和技术特点2.1 管道清洗机器人功能管道清洗机器人是清洗通风管道的主要设备。
管道清洗机器人有着其它管道清洗方式不可比拟的优势,也是用户认可一个清洗公司是否具备清洗资格的重要标志之一。
本管道清洗机器人采用机械清洗方法,即通过机器人携带高速旋转的毛刷进入管道击打管内壁,除去附着的污垢。
管道清洗机器人不仅可以清洗和清洗效果的检查,还可以进行管道探伤等。
2.2 技术特点①该管道清洗机器人适用于非等径、变截面复杂管道环境,既可用于矩形截面,也适用于圆形截面通风管道的管道清洗或检测。
②机器人最大能越过9cm高的台阶和爬30度的坡度。
③矩形管道高度适应范围可达300mm~600mm。
④机器人既可安装圆管清洗毛刷也可安装矩形管毛刷,更换毛刷简便快捷。
中央空调管道清洁机器人机构设计与结构分析
机电信息工程中央空调管道清洁机器人机构设计与结构分析朱金金(南通理工学院,江苏南通226000)摘要:中央空调系统是现代智能建筑体系中的重要组成部分,它由多个冷热源系统和多个空气调节系统组成,同传统空调系统具有较大的区别。
本文正对中央空调管道清洁机器人机构设计与整体结构设计情况展开分析,旨在为中央空调系统的可持续应用提供借鉴和参考。
关键词:中央空调;管道系统;清洁机器人;机构设计;结构分析1中央空调管道清洁机器人设计的需求11具有灵活的结构特点事实上,在不同的行业领域中所采用的中央空调管道系统型号并不相同,且空调内的管道系统结构也不相同。
因此,所设计出的管道清洁机器人要具有较为灵活的结构特点,满足各种上下左右的移动要求。
1.2具有较高的清洗清扫功能中央空调管道具有大、数量多等特点,因此在管道内所滞留存在的不仅仅是体积质量较大的灰尘,还可能出现动物尸体等。
因此,管道清洗机器人要具有强大的清洗清扫能力,能够满足各种清洗标准,甚至在绿色生活理念下,管道清洁机器人还需要拥有一些附加的功能。
2中央空调管道清洁机器人机构设计与结构分析2.1中央空调管道清洁机器人系统分析中央空调管道清洁机器人的机构性能设计归根结底是为了清洁管道而服务的,因此在设计中央空调管道清洁机器人之前,需要展开对空调管道装置系统的分析。
不同类型大小的中央空调管道系统组成是不同的,因此所采用的清洗方案也是不同的。
当前要想设计出一款具有普适性的中央空调管道清洁机器人,需要展开对管道系统结构的分析。
基于对管道系统装置的分析,本文所分析的管道清洁机器人其工作的整体情况如下所示:①清洁机器人要进入到空调管道中进行管道内部环境的检查,因此,需要配备行走机构,满足空调管道上下左右前后的行走,在系统中作者简介:朱金金(1988—",男,汉族,硕士研究生,助教,研究方向:机械设计及制造。
还需要配备视频传感器,将管道内部环境卫生情况上报控制系统,制定清洗方案。
风管清洁机器人机器人创新设计
风管清洁机器人机器人创新设计标准化管理部编码-[99968T-6889628-J68568-1689N]中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案1.1系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a 中step2和step4所示。
用于中央空调管道清洗机器人障碍探测的测距仪器设计

虑的主要问题有 : 超声波发射部分程序与接 收部分程序 的设 置位 置 ; 为保证 动态 显示 的数码 管不 发 生 闪烁 现 象 , 在程 序 的一次 大循 环 中要 多 次 调 用 显示 子 程 序 ; 于 报 对 警程 序 的设 计 需要 嵌 入 到主 程 序 中 , 灵 活安 排 这 些 程 需 序 的设 置位置 . 3 测 距实例 ( 图 3 见 )
2 软 件实现 2 1 测 距原 理 .
超 声波测 距 的原理 , 即超 声 波 发生 器 T 在 某一 时 刻 发 出 的一个 超声波 信 号 , 当超声 波 遇 到 被 测 物 体后 反 射 回来 , 就被超声波接收器 R所接受.这样 只要计算出发 生 信号 到接 收返 回信 号所 用 的时 间 , 可算 出超 声 波 发 就
4 5 .2 0 . . 0 1 0 5 7
[] 3 刘爱华 . 传感器原理与应用技术 . 民邮电出版社 ,0 6 1. 人 2 0 .0
图 2 主 程 序 流 程 图
[] 4 赵建领.1 5 单片机开发与应用技术详解.电子工业出版社 ,090 20 .1 作者简介: 杨颖红 , , 女 助教.工作单位 : 南京工程学 院 自动化学 院.通讯 地址 :10 3南京市鼓楼区鼓教新村 2 20 1 9号 4 2室 . 0 温秀兰, 金钊 , 葛傲 , 刘大伟 , 南京工程学院 ( 南京 2 0 1 ) 10 3 .
( 上接第 1 2页 )
相关 输送 过程 的试 验 研究 紧密 联 系 的.然 而 , 模糊 控 将 制 专家 系统思想运 用于气 固两 相输送 过程 的控制 是实 现 输 送过程 节能优化 的一种 可行 的途径 .
参 考 文 献
真模型建 立之后 , 就可 以进行 相 应 的仿 真 实 验 .取 定 初 始风速值 , 由于输送 系 统 的数 学模 型 是在 物 料 或颗 粒 都 处 于悬 浮状态 下建 立 的 , 以此初 始 值应 尽 量 大于 悬 浮 所
中央空调管道清洁机器人机构设计
始 康嵌勇
﹑ ﹑必嵌嵌情﹑
﹑
度容意?
?
康
必
情
﹑
﹑
感
必嵌康嵌
﹑
﹑
﹑
﹑
形?
?
形容度
种﹑﹑
臂﹑﹑
﹑
﹑
?
﹑
康富 必富
喷康囊 喷必囊 喷情囊 喷感囊 喷拌囊
﹑
﹑
﹑ ﹑
﹑ ﹑
﹑ ﹑﹑ ﹑
拌
﹑
﹑ ﹑
必嵌康嵌
﹑
喷措囊
﹑
必富康
﹑
形容形? 2.2.1
必富康﹑
﹑
必—拌嵌
康嵌嵌
﹑﹑
点嵌必 暖嵌
暖拌
﹑
情—感 ﹑
感嵌
康 ﹑ 措嵌
康嵌 ﹑﹑
康
必嵌康嵌
﹑﹑﹑﹑﹑﹑﹑
必嵌 操嵌
旋嵌
康暖暖嵌 ﹑﹑
康暖旋嵌
﹑
情嵌嵌嵌
﹑
﹑﹑
感 必感嵌
度容形?
必嵌 操嵌
康嵌嵌骤骤岔s 必岔
?
措嵌 旋嵌
康嵌风铅
嵌
情措嵌°
﹑
﹑ 康骤岔s
康暖暖嵌
必嵌
蓄集魁t邦首鉴躯魁
﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑﹑ ﹑
?? ? ?
﹑
﹑
﹑
? 析
﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑ ﹑
﹑
﹑
﹑
﹑
﹑﹑
Abstract
A Central air condition duct clean robot is a mechanical system, which can walk automatically inside a pipe. It works in central air
中央空调管道清洗机器人毕业设计

1.3
2006年6月,上海几家大医院陆续收治了几名“军团杆”的肺炎患者。专家指出,“军团杆菌”主要寄生在中央空调的冷却水和管道系统中,可经通风口进入写字楼内部,从而使人群受感染。中央空调和管道系统中不但有军团杆菌,还滋生着很多细菌,如大肠杆菌,血溶性链球菌及各种呼吸道疾病,严重危害了人们的健康和生产生活,近年来空调管道系统的清洁已越来越受到社会的关注。
Keywords:Adaptivemobile mechanismpipe robotMechanical design Screw—drive.
1
1.1
机器人技术是涉及机械学、传感器技术、驱动技术、控制技术、通信技术和计算机技术的一门综合性高新技术,既是光机电软一体化的重要基础,又是光机电软一体化技术的典型代表。其产品主要有两大类,即以日本和瑞典为代表的一系列特定应用的机器人,如弧焊、点焊、喷漆装备、刷胶和建筑等,并形成了庞大的机器人产业。另一类是以美国、英国为代表的智能机器人开发,由于人工智能和其它智能技术的发展远落后于人们对它的期望,目前绝大部分研究成果未能走出实验室。 机器人系统集成技术也是由几个主要发达国家所垄断。近年来,机器人技术并未出现突破性进展,各国的机器人技术研究机构和制造厂商都继续在技术深化、引进新技术和扩大应用领域等方面进行探索。
中央空调管道清洗机器人设计
0引言
随着社会经济的发展,中央空调在国内外的使用 率越来越高。然而不洁净的空调送风会对人体健康 带来不利影响,使人经常感觉胸闷气短、浑身乏力和 抵抗力下降,甚至诱发许多严重的疾病,包括:哮喘、 过敏、皮疹和肺结核等¨圳。由于集中空调是依靠风 道及出风口将处理后的空气送人房间,风道属密闭空 间,而室外空气中各类悬浮颗粒物不能完全被空调过 滤装置所阻隔,微细灰尘便会进入风道黏附在风道内 壁上,加之大多数风道狭小,日积月累便形成大量积 尘,诱发细菌滋生,传染疾病。同时空调管道内的积 尘使风力受阻,增大了风机负载,使机组工作能力下 降、设备寿命降低和能源消耗增加。由于管道结构的 原因,人工清洗困难,劳动量大,工作效率低,容易留 死角,清理产生的粉尘危害人体健康【5刁]。管道清洁 机器人是可以替代人工成功解决空调通风管道清洁 的有效途径。因此,笔者设计了一个中央空调管道清 洗机器人,并对实现该系统的关键技术进行了详细的
万方数据
讨论,主要包括管道清洗装置,实现管壁内侧积尘打 落,检测监控系统,检测监控管道内污染实际状况。
1 清洗机器人的机械设计
笔者设计的中央空调管道清洗机器人结构如图1 所示,采用电动机驱动清扫刷对管道臂进行清扫,改 变清扫刷电动机的旋转方向,可以适应不同内壁的清 扫;移动小车驱动机器人至管道内的不同位置进行清 扫;利用升降电动机、丝杆副和支撑臂组成的清扫臂 起落机构调整清扫臂的前倾角度,从而改变清扫高 度,适应不同截面的管道;更换小连杆来改变清扫臂 的长度,从而改变清扫刷高度,以适应不同截面的管 道;利用超声波探头来探测车体前方是否有障碍物, 来判断是否需要转弯避障;利用摄像头可将管道内部 的清扫臂工作状况在PC机上进行显示或存储,便于 外部观看和监控。
中央空调通风管道清扫机器人机构设计与工作性能分析
中央空调通风管道消除机器人机构设计与工作性能分析一、引言中央空调系统在现代建筑中得到了广泛的应用,它能够为室内提供舒适的温度和通风环境。
然而,长期使用后,空调通风管道内会积累大量的灰尘,细菌和有害物质,这不仅会影响空调系统的工作效率,还会对人体健康构成恐吓。
因此,进行定期消除和消毒是保持中央空调良好工作状态和室内空气质量的重要手段。
二、机器人机构设计为了解决中央空调管道消除的难题,我们设计了一种中央空调通风管道消除机器人。
机器人机构包括底盘,行走装置,机械臂,消除装置和控制系统等主要部件。
底盘是机器人的基础结构,能够提供稳定的支撑。
行走装置接受履带设计,能够在管道内快速穿行,并适应不同直径和外形的管道。
机械臂由多个关节组成,可以自由弯曲和伸展,以适应不同位置和角度的清洁工作。
消除装置接受刷子和吸尘器的组合,通过旋转刷子清除管道内的灰尘,并通过吸尘器将污物吸走。
控制系统负责对机器人进行遥程操作和控制,实现消除任务的自动化。
三、工作性能分析1. 消除效果分析通过对中央空调管道进行大量试验,我们发现机器人消除效果分外好。
机械臂的灵活性使其能够遮盖到管道的每个角落,并且清除效果分外彻底。
消除装置的设计合理,刷子旋转可以产生足够的清洁力,吸尘器能够将污物彻底抽走。
经过消除后,管道内的污染物明显缩减,室内空气质量得到了明显改善。
2. 自主导航能力分析机器人具备自主导航能力,可以依据预设的路线进行自主行走。
通过激光测距仪和红外传感器等传感器的合理安置,机器人可以实时感知管道的环境变化,并依据自身的位置和方向进行调整。
在实际测试中,机器人能够准确地按照设定的路径行走,在遇到障碍物时能够准时绕过,具有良好的自主导航能力。
3. 消除效率分析机器人的消除效率分外高。
由于机器人的行走装置接受履带设计,具有很好的抓地力,可以在管道内快速行进。
机械臂的灵活性使其可以快速遮盖到管道的每个角落,并且刷子旋转和吸尘器的组合设计使清洁速度得到了提高,大大节约了清洁时间。
基于FPGA的中央空调管道清洗机器人设计

[4] 陈]. 现代制造工程,2010( 6) : 134. ( 郁菁编发) 櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚櫚 ( 上接第 36 页) 网卡驱动 rt73. ko,启动无线网卡接入网络,启动 boa 服务器和视频服务器,这样就完成了系统服务器端测 试平台的搭建。客户端使用 Windows 自带的 IE 浏览 器,因为动态网页中的 applet 程序需要 JRE 支持,所以 客户端需要安装 JRE 使浏览器支持 java 控件。在 IE 地址栏中输入: http: / / web 服务 IP / videoplay. html,观 看动态网页上的监控视频,画面清晰流畅; 多个浏览器 同时访问动态网页 videoplay. html 时不丢帧,很好地支 持多用户的访问; 从 USB 移动硬盘中拷贝存储的 avi 视频文件,用播放器播放,能获得较好的视频质量。
FPGA 产生相应的控制信号,经光耦电路进行保 护后接入 LM298 驱动电路,对电机进行控制。通过改 变输出 PWM 波的占空比实现对电机的调速控制。
LM298 驱动电路如图 2 所示。一 个 LM298 芯片可以产生两路 PWM 波, 控制两 个 直 流 电 机 或 一 个 步 进 电 机。 图中 PWMA / B 接 FPGA 输出的 PWM 波,控制电机的转速。In_A / B1 及 In_ A / B2 控制电机的正反转和制动。 2.3 超声波传感器收发模块
整个系统分为操作层( 上位机) 、感知层、决策层 ( 核心处理器) 、运动控制层。
感知层由超声波模块、视频监控模块组成。超声 波模块将超声波传感器测得的障碍物情况传给决策 层,供其进行行为决策; 视频监控模块将通过摄像头得 到的视频画面传到上位机中,以供操作人员观看小车 运动情况。
中央空调管道清洗机器人控制系统设计

中央空调管道清洗机器人控制系统设计何琴【摘要】In order to solve the problems of central air conditioning duct diameter non-standard and the difficulty of the duct cleaning,the automatic centering technology was investigated. After analysing the central air conditioning duct cleaning robot control system,adopting a modular design thought, taking ATmega64 microcontroller as the control core,the relations between modules were established. A method was presented to the central air conditioning duct cleaning robot control system design. The cleaning technology was evaluated based on the existing cleaning technology. The results show that the cleaning robot can achieve automatic centering to adapt different pipe diameters to finish cleaning tasks, provide a broad application prospects for central air conditioning duct cleaning technology.%为解决中央空调管道清洗难及管径不规范等问题,将自动定心技术应用到管道清洗机器人中,开展了中央空调管道清洗机器人控制系统方案分析与设计.采用模块化的设计思想,以ATmega64单片机为控制核心,建立了各个功能模块之间的关系,实现了中央空调管道清洗机器人整个控制系统的方案设计.在现有的中央空调管道清洗技术基础上,对相关研究成果进行了对比分析及评价.研究结果表明,所设计的清洗机器人能够实现自动定心以适应不同的空调管径,完成清洗作业,为中央空调管道清洗技术提供了广阔的应用前景.【期刊名称】《机电工程》【年(卷),期】2011(028)008【总页数】4页(P944-947)【关键词】中央空调;清洗;机器人;ATmega64【作者】何琴【作者单位】武汉理工大学机电工程学院,湖北武汉430070【正文语种】中文【中图分类】TH39;TP2420 引言近年来,随着我国城市建设高速发展,越来越多的楼宇采用集中空调系统,同时关于保持空调通风系统洁净(特别是高层建筑的通风管道)的问题也随之产生。
中央空调管道清洁机器人机构设计说明

中央空调管道清洁机器人机构设计一、课题训练容本课题基于国外已经取得的科研成果,针对中央空调矩形通风管道系统的特点作了深入的分析和论证,在查阅和掌握大量有关文献的基础上,针对矩形的空调管道提出了管道机器人的机构设计方案。
本课题训练容:1.移动载体的设计﹑撑紧装置的设计﹑机械手的设计2.零件设计计算以及强度校核3.对机器人在转弯时的通过性进行了分析二、设计(论文)任务和要求(包括说明书、论文、译文、计算程序、图纸、作品等数量和质量等具体要求)论文任务:针对矩形的空调管道设计管道清洁机器人。
论文要求:1.设计说明书按《科技学院毕业设计(论文)格式模板》要求书写。
2.译文见附页。
3.程序要求框图详细完整,硬件图纸完备,程序清单作为附页附在论文后,程序及电子文档刻成光盘与报告同时上交。
4.设计指标需考虑技术经济性要求。
三、毕业设计(论文)主要参数及主要参考资料主要参数:机器人车体长为501mm,宽438mm,高为294mm,车体加上机械手附带毛刷总长为1281mm;机械手总长为792.5mm水平最高行进速度:1m/s;垂直攀爬速度:100mm/s;垂直攀爬载重:10kg;回转半径:0;机械手自由度:4;监视器回转速度:2度/秒;监视器水平回转围:360°;监视器俯仰回转围:240度。
主要参考资料:[1] GB/T 19210-2003.空调通风系统清洗规[S].中国标准化,2003,(9):66-67[2] 甘小明,徐滨士,董世运等.管道机器人的发展现状[J].机器人技术与应用,2003,(6):5-10[3] 龚振邦等编著.机器人机械设计[M].:电子工业,1995[4] 濮良贵,纪名刚等编著.第8版.机械设计[M].:高等教育,2005[5] 桓,作模,文杰等编著.第7版.机械原理[M].:高等教育,2006[6] 宋章军,恳,向东等.通风管道智能清污机器人MDCR-I的研制与开发[J].机器人,2005,27(2):142-146[7] 晓明,车立新,霄鹏等.中央空调管道清扫机器人的设计[J].机械,2005,32(1):39-41[8] 文彬,建国,蓓智等.管道检测机器人的研制[J].机械工程师,2005,(1):16-18四、毕业设计(论文)进度表纺织大学毕业设计(论文)进度表注:1.本任务书一式两份,一份院(系)留存,一份发给学生,任务完成后附在说明书。
中央空调风管清洗机器人研究
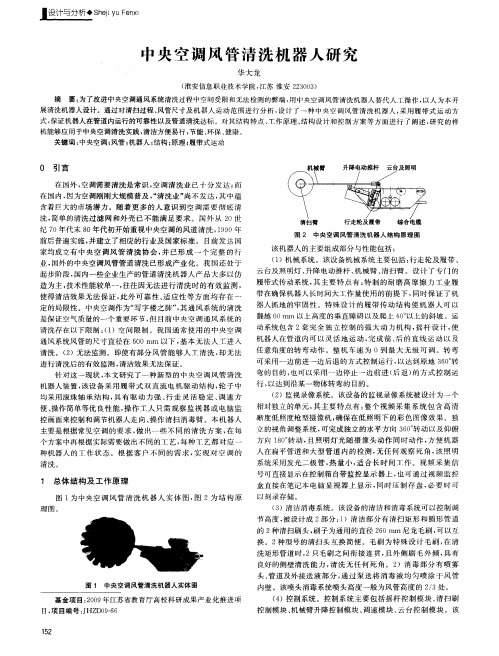
度。正常行进时 , 保持摄像 机在 机器人本 体正 中, 即观察监 视
器 上所 能观 察 到 的机 械 臂 或前 轮 是 在 画 面 中 间还 是 两 边 , 清 洗 风 管 上 面 时 可仰 起 摄 像 机 观 察 。当 按 下 按 扭 时 不 动 作 , 为 到 行
3 控 制 系 统 方 案 设计
机器人控制系统总体方案 , 采 用 AC 2 2 0 V 电源 , 电脑 电 源 ( g J 率小于 1 0 0 w) 采 用 电 源 照 明 开关 , 按 下开关 , 内部指示灯 亮, 云台照明灯亮 , 控 制 箱 整 体 得 电 。按 下 此 开 关 时 必 须 连 接
菌不得检 出。
[ 参 考文 献] E l i马平 , 吕锋 , 杜海 莲 , 等. 多 传 感 器 信 息 融 合 基 本 原 理 及 应 用 [ J ] . 控 制工程 , 2 0 0 6 ( 1 ) : 4 8  ̄5 1 [ 2 ]F a n L i n . C l e a n i n g o f t h e a i r d u c t s o f c e n t r a l a i r - c o n d i t i o n i n g
在此基础上 , 进 行 样 机 的整 体 机 构 设 计 。此 外 , 还 要 考 虑 机 器
人 的安全性 、 操控 性、 外观等 问题 。设计后 的机器 人 主要 技术 参数具体如表 1所示 。
表 1 中央 空 调 风 管 清 洗 机 器 人 主 要技 术 参 数
尺 寸 清 洗 管 道 范 围 圆 形 管 道 直 径 管 内越 障高 度 ≥3 0 0mm ≤6 0 mm 毛 刷 转 速
2 机 器 人 主 要 技 术 参 数 设 计
中央空调通风管道清洗机器人硬件设计
摘要:本设计在分析市场上现有管道机器人软硬件与机构设计的优缺点的基础上,利用motorola公司生产M68HC11A1作为机器人的中央控制器,以计算机为控制平台,通过RS-232串口通信对机器人进行控制,实现对通风管道进行清洗。
试验结果证明:管道清洁机器人成本低,操作系统简单,可以替代人工有效解决中央空调通风管道的检测和清扫问题,提高楼层室内的空气质量。
管道清洁机器人作业效率高,事故发生概率小,也可用于其他多种管道的监测维护工作,具有良好的应用前景。
关键词:管道清洗机器人PWM调速RS-232串口通信1概述近年来,随着我国城市建设的迅速发展,使用空调通风设备日益增多,保持空调清洁成了困扰很多城市特别是高层建筑的突出问题。
目前,对于空调通风管道的清洁,国内尚没有合适的自动化工具,而采用人工清洁的方式危险性大、劳动量大、工作效率低,而且清理期间产生的粉尘极易对工人身体造成危害。
管道清洁机器人是可以替代人工成功解决空调通风管道清洁的有效途径。
2管道清洗机器人功能和技术特点2.1管道清洗机器人功能管道清洗机器人是清洗通风管道的主要设备。
管道清洗机器人有着其它管道清洗方式不可比拟的优势,也是用户认可一个清洗公司是否具备清洗资格的重要标志之一。
本管道清洗机器人采用机械清洗方法,即通过机器人携带高速旋转的毛刷进入管道击打管内壁,除去附着的污垢。
管道清洗机器人不仅可以清洗和清洗效果的检查,还可以进行管道探伤等。
2.2技术特点①该管道清洗机器人适用于非等径、变截面复杂管道环境,既可用于矩形截面,也适用于圆形截面通风管道的管道清洗或检测。
②机器人最大能越过9cm高的台阶和爬30度的坡度。
③矩形管道高度适应范围可达300mm~600mm。
④机器人既可安装圆管清洗毛刷也可安装矩形管毛刷,更换毛刷简便快捷。
⑤本机器人借助以计算机为平台的视频图像采集,利用计算机进行图像的显示和录制。
⑥检测机器人与清洗机器人合二为一的设计,降低了客户采购成本与使用复杂度,只需更换相应模块便可以实现两种机器人的功能。
中央空调管道清洁机器人的设计

精选教育文档衢州学院毕业设计(论文)题目:中央空调管道清洁机器人的设计作者:董海系(部):机械工程学院专业班级:机械设计与制造08级(2)班指导教师:田敬职称:讲师二零一一年一月十八日可编辑可修改,欢迎下载精选教育文档中央空调管道清洁机器人的设计摘要随着经济发展,人们的身心健康越来越受到重视。
而污染的中央空调日益成为危及人们身心的祸害根源。
因此,中央空调尤其是中央空调管道的检测与清洗越来越受到社会的重视。
本文首先阐述了中央空调管道清洗的背景与现状,结合国内外中央空调清洁机器人的发展,阐明了本课题的研究背景和意义,简述了本文的组织形式和研究内容。
然后重点介绍了中央空调清洁机器人行走机构、清扫机构和监视控制系统三大结构的设计与实现过程。
同时,针对中央空调清洁机器人清扫中央空调管道时存在的难点,本文深入探讨了机器人转弯与安全行走的原理。
最后,本文对主要工作和研究内容进行了总结,并对今后的研究方向做出了展望。
关键字:中央空调,机器人,旋转刷,电动机可编辑可修改,欢迎下载精选教育文档目录中央空调管道清洁机器人的设计 (I)摘要 (I)第一章前言 (1)1.1课题的背景与意义 (1)1.2机器人的发展现状及趋势 (1)1.2.1国内领先水平的管道清洁机器人 (2)1.2.2中央空调管道清洁机器人发展趋势 (3)1.3本课题的设计任务 (3)第二章中央空调管道机器人系统设计 (5)2.1工作原理及组成 (5)2.2机器人设计原则 (6)2.3整体方案选择 (7)第三章行走机构设计 (9)3.1机器人驱动机构 (9)3.1.1电机的选择 (9)3.1.2传动齿轮的设计 (10)3.1.3传动轴的设计 (15)3.2导向轮系统 (18)3.2.1导向轮系统原理 (18)3.2.2电机的选取 (18)3.2.3传动带的选择 (19)3.2.4导向轮的设计 (21)第四章清扫机构................................................................................. - 24 -4.1清扫方案确定.. (24)可编辑可修改,欢迎下载精选教育文档4.2旋转刷系统主要构件 (25)4.3构件的选择 (25)4.3.1气动马达的选择 ............................................................................ - 25 -4.3.2旋转刷的设计 ............................................................................... - 27 -第五章监视控制系统.......................................................................... - 28 -5.1摄像头的选择.. (28)5.2摄像头的固定和调整 (28)5.3监视器 (29)5.4照明装置 (29)5.5灰尘收集装置 (30)第六章结束语 ···················································································· - 31 -参考文献 ························································································ - 32 -谢辞··································································································· - 33 -可编辑可修改,欢迎下载精选教育文档第一章前言1.1课题的背景与意义在室内空气污染来源中,中央空调的污染物与日俱增。
中央空调管道清洁机器人的设计2

衢州学院毕业设计〔论文〕题目:中央空调管道清洁机器人的设计作者:童顺丙系〔部〕:机电控制工程学院专业班级:机械设计与制造08级〔1〕班指导教师:田敬职称:讲师二O一一年一月十八日中央空调管道清洁机器人的设计摘要本次设计的机器人用于污染的中央空调管道的清洁,整体结构主要由行走机构、清扫机构和监视控制系统三局部组成,行走机构又分为驱动机构、导向轮系统两局部。
驱动方式为单电机驱动机器人前轴。
在清扫之前,通过调整支撑臂上的螺钉来调节两个导向轮的横向距离,保证机器人处于管道中央时导向轮两端距管道壁各有约20mm。
清洁工作主要由旋转刷系统完成,旋转刷由气动马达驱动,与气动马达相连的刷杆采用伸缩式结构,可以进行长度调节;旋转刷头可拆卸并且有不同的材料和尺寸系列,整个装置可以进行俯仰调整,从而保证在管道都能彻底清扫到管道的边角和顶部。
在清扫过程中,利用气动马达吹出的高压空气将扫落的灰尘吹向前方,便于抽风机抽出。
清洁过程中,通过监视系统可以方便的对清扫情况进行实时监控,当出现清扫效果不理想时可以操纵机器人后退再清扫一次。
关键字:中央空调管道,清洁机器人,马达,旋转刷目录第一章概述 (1)课题的背景及意义 (1)机器人开展现状及趋势 (2)国内领先水平的管道清洁机器人 (2)中央空调管道清洁机器人开展趋势 (3)1.3本课题的设计任务 (3)第二章中央空调管道机器人系统设计 (4)工作原理及组成 (4)机器人设计原那么 (5)2.3整体方案选择 (6)第三章行走机构设计 (8)机器人驱动机构 (8)电机的选择 (8)传动齿轮的设计 (9)传动轴的设计 (14)导向轮系统 (17)导向轮系统原理 (17)电机的选取 (17)传动带的选择 (18)导向轮的设计 (20)第四章清扫机构 (23)清扫方案确定 (23)旋转刷系统主要构件 (24)构件的选择 (24)气动马达的选择 (24)旋转刷的设计 (26)第五章监视控制系统 (28)摄像头的选择 (28)摄像头的固定和调整 (28)监视器 (29)照明装置 (29)灰尘收集装置 (30)第六章总结 (32)参考文献 (33)谢辞 (32)第一章概述课题的背景及意义随着当今社会的开展,空调通风系统在日常生活中发挥着越来越重要的作用。
风管清洁机器人机器人创新设计

中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a中step2和step4所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 2.3吸尘结构 吸尘结构 • 主要部件是真空泵、集尘袋、软管及各种形状不 主要部件是真空泵、集尘袋、 同的管嘴,它有一个电动抽风机 通电后高速运转, 它有一个电动抽风机, 同的管嘴 它有一个电动抽风机,通电后高速运转, 使吸尘器内部形成瞬间真空, 使吸尘器内部形成瞬间真空,使内部的气压大大 低于外界的气压,在这个气压差的作用下, 低于外界的气压,在这个气压差的作用下,尘埃 和脏物随着气流进入吸尘器桶体内, 和脏物随着气流进入吸尘器桶体内,再经过集尘 袋的过滤,尘垢留在集尘袋, 袋的过滤,尘垢留在集尘袋,净化后的空气则经 过电动机重新逸入室内,起到冷却电机、 过电动机重新逸入室内,起到冷却电机、净化空 气的作用。 气的作用。 3 .控制系统设计 控制系统设计
谢谢大家! 谢谢大家!
• 2.2毛刷机构 毛刷机构 • 是由24V直流电机独立驱动的,在设计过程中需 直流电机独立驱动的, 是由 直流电机独立驱动的 要考虑驱动电机如何放置以及如何与移动小车的 连接问题。这直接影响到整个运动的传递, 连接问题。这直接影响到整个运动的传递,从而 影响了毛刷机构的结构。 影响了毛刷机构的结构。此外还需注意的就是毛 刷臂的平衡。 直流电机竖立在小车的前端, 刷臂的平衡。将24V直流电机竖立在小车的前端, 直流电机竖立在小车的前端 通过连接板与小车连接, 通过连接板与小车连接,电机输出经一对锥齿轮 机构改变方向, 机构改变方向,利用锥齿轮带动与其同轴的小带 小带轮通过聚氨酯PU带将动力传给大带轮 带将动力传给大带轮, 轮,小带Байду номын сангаас通过聚氨酯 带将动力传给大带轮, 最后由大带轮带动工作元件毛刷轴( 最后由大带轮带动工作元件毛刷轴(上面插有刷 毛)。
基于中央空调管道清扫机器人 的设计
负责人:王群涛 自动化08-03 成 员: 杨宗龙 自动化08-03 高慧祥 自动化08-03 陈雷亮 自动化08-03 何 武 电科09-3班 位庆海 电科09-3班
2011.6.12
一.项目产生背景 项目产生背景 • 目前我国的中央空调大多采用“间接式盘管换热”,这种 目前我国的中央空调大多采用“间接式盘管换热” 设计会在凝结水盘内形成高湿环境,如果施工不当或设计 设计会在凝结水盘内形成高湿环境, 不周,甚至会造成凝结水聚积。 不周,甚至会造成凝结水聚积。一旦室外空气致病微生物 通过新风入口由灰尘带入,就会粘附在盘管上。 通过新风入口由灰尘带入,就会粘附在盘管上。再加上中 央空调生产企业为价格竞争,在过滤设备上“偷工减料” 央空调生产企业为价格竞争,在过滤设备上“偷工减料”, 造成大量垃圾有隙可入, 造成大量垃圾有隙可入,中央空调管道内成了许多有害颗 粒和灰尘、病菌、病毒、尘螨、 粒和灰尘、病菌、病毒、尘螨、动物腐体及碳放射物的藏 身之所,威胁着人类的健康。经过现场考察,各大商场、 身之所,威胁着人类的健康。经过现场考察,各大商场、 超市及我校图书馆等场所也存在类似的问题, 超市及我校图书馆等场所也存在类似的问题,通风管道不 能得到定期清理,对我们的身体(尤其是呼吸系统) 能得到定期清理,对我们的身体(尤其是呼吸系统)造成 伤害。这个忧虑以唤起社会有识之士, 伤害。这个忧虑以唤起社会有识之士,政府部门对中央空 调管道清理的重视。 调管道清理的重视。因此我们着手研制专门用于中央管道 清理的机器人系统。 清理的机器人系统。
二.目的意义 目的意义 主要针对我国中央空调通风系统的清洁, 主要针对我国中央空调通风系统的清洁,研制 该产品,主要用于清洁中央空调的通风系统, 该产品,主要用于清洁中央空调的通风系统,为 我国各中央空调应用场所营造一个良好的、 我国各中央空调应用场所营造一个良好的、清洁 的呼吸环境, 的呼吸环境,进而为广大人民群众创造良好的生 活和工作环境。 活和工作环境。 .系统设计 三.系统设计 1. 系统总体设计 • 首先,我们需要分析一下该机器人要实现的功能。 首先,我们需要分析一下该机器人要实现的功能。 就中央空调管道清扫机器人而言, 就中央空调管道清扫机器人而言,其功能首先是 在管道里行走,对管道进行清扫,最后还要把清 在管道里行走,对管道进行清扫, 扫的过程和效果提供给客户。系统流程如下: 扫的过程和效果提供给客户。系统流程如下:
• 简单高效;(3)刷臂可在一定角度范围内调节 简单高效;( ) ;( (30度),这样可使该毛刷机构适用于多种规格 度),这样可使该毛刷机构适用于多种规格 的空调管道,具有一定的通用性;( ;(4) 的空调管道,具有一定的通用性;( )备有各种 规的毛刷轴和刷毛供替换,方便快捷, 规的毛刷轴和刷毛供替换,方便快捷,可适用于 绝大部分空调管道;( ;(5) 绝大部分空调管道;( )毛刷臂前端可设支撑机 构,用来克服由毛刷臂和毛刷轴自重带来的对小 车的倾覆力, 车的倾覆力,而不是采用传统的在小车后面加配 这样节省了小车的驱动力, 重,这样节省了小车的驱动力,使小车可以克服 更大的电缆阻力而增加其行程, 更大的电缆阻力而增加其行程,这也是本清扫机 器人区别于其他国内外产品的鲜明特点。 器人区别于其他国内外产品的鲜明特点。
系统设计流程图如下
2 机器人结构设计 • 该清扫机器人由移动小车、毛刷机构以及真空泵 该清扫机器人由移动小车、 部分组成,因此可以分别设计,在设计过程中需 部分组成,因此可以分别设计, 要考虑三部分如何连接对机器人工作最有利。 要考虑三部分如何连接对机器人工作最有利。 2.1移动小车的设计 移动小车的设计 • 考虑到小车在清扫过程中需要克服一定的阻力和 电缆重量,我们采用了四轮同步带式移动机构。 电缆重量,我们采用了四轮同步带式移动机构。 两个24V直流机分别驱动小车的左履带和右履带, 直流机分别驱动小车的左履带和右履带, 两个 直流机分别驱动小车的左履带和右履带 两电机转向相同时,小车直线前进或后退; 两电机转向相同时,小车直线前进或后退;两电 机转向相反时,小车原地转弯。 机转向相反时,小车原地转弯。这种驱动方式的 分配可以使小车的回转半径达到最小, 分配可以使小车的回转半径达到最小,有利于在 狭小的管道内作业。小车是在管道内行走的, 狭小的管道内作业。小车是在管道内行走的,因 小车的大小受到中央空调管道尺寸的限制。 此,小车的大小受到中央空调管道尺寸的限制。 目前国内中央空调主风道的截面规格多为宽 500~1500mm、高250~500mm的矩形截面。综合 的矩形截面。 、 的矩形截面 考虑以上因素, 考虑以上因素,我们设计的小车较小
• 该毛刷机构有如下特点:(1)电机竖立在小车前端,这 该毛刷机构有如下特点:( )电机竖立在小车前端, :( 样布置电机的优点是可以充分利用小车上面的空间;( ;(2) 样布置电机的优点是可以充分利用小车上面的空间;( ) 采用锥齿轮和PU带传动 价格低廉, 带传动, 采用锥齿轮和 带传动,价格低廉,
• 本清扫机器人的控制系统由管内车载控制系统和 管外监控系统两部分组成。控制器采用单片机。 管外监控系统两部分组成。控制器采用单片机。 小车和毛刷机构由车载单片机直接控制,而管外操 小车和毛刷机构由车载单片机直接控制 而管外操 作者在操作面板上通过管外单片机与管内车载单 片机间的通讯实现对清扫机器人的作业监控。 片机间的通讯实现对清扫机器人的作业监控。它 可以实现1200 m左右距离的可靠通讯 且只需两 左右距离的可靠通讯,且只需两 可以实现 左右距离的可靠通讯 根信号电缆,减小了清扫机器人行进过程中的拖线 根信号电缆 减小了清扫机器人行进过程中的拖线 阻力,对机器人长距离拖缆作业有重要意义。 阻力,对机器人长距离拖缆作业有重要意义。下 面按各个功能模块来介绍清扫机器人的控制系统。 面按各个功能模块来介绍清扫机器人的控制系统。 • 3.1管内外监控作业方式的实现 管内外监控作业方式的实现 • 为保证清扫机器人的作业安全性和可靠性 除管道 为保证清扫机器人的作业安全性和可靠性,除管道 内车载控制系统能对清扫机器人的管道内作业进
• 我们采用了定频调宽方式,因为采用这种方式, 我们采用了定频调宽方式,因为采用这种方式, 电动机在运转时比较稳定; 电动机在运转时比较稳定;并且在采用单片机产 脉冲的软件实现上比较方便。 生PWM脉冲的软件实现上比较方便。 脉冲的软件实现上比较方便 PWM电路由四个大功率晶体管组成 型桥式电路 电路由四个大功率晶体管组成H型桥式电路 电路由四个大功率晶体管组成 构成,四部分晶体管以对角组合分为两组: 构成,四部分晶体管以对角组合分为两组:根据 两个输入端的高低电平决定晶体管的导通和截止。 两个输入端的高低电平决定晶体管的导通和截止。 4个二极管在电路中起防止晶体管产生反向电压的 个二极管在电路中起防止晶体管产生反向电压的 保护作用。 个电感在电路中是起防止电动机两端 保护作用。4个电感在电路中是起防止电动机两端 的电流和晶体管上的电流过大的保护作用。 的电流和晶体管上的电流过大的保护作用。
• 3.3断线的故障处理 断线的故障处理 • 为避免断线使通讯中断造成清扫机器人失控的事 故发生,不但要对线缆强度和机器人结构等作适 故发生, 当处理,在控制上亦应采取相应措施 在控制上亦应采取相应措施。 当处理 在控制上亦应采取相应措施。因此车载从 单片机必须具有一定判断能力,以判断通讯中断事 单片机必须具有一定判断能力 以判断通讯中断事 件的发生,并及时报警 避免事故发生。 并及时报警,避免事故发生 件的发生 并及时报警 避免事故发生。设计中我们 采用自动判断方式,当机器人需要回走的时候, 采用自动判断方式,当机器人需要回走的时候, 或者毛刷产生堵转,或者真空泵工作异常时, 或者毛刷产生堵转,或者真空泵工作异常时,都 会通过信号线向外部发出信号, 会通过信号线向外部发出信号,使报警信号灯点 通知工程人员收线,将机器人拽出, 亮,通知工程人员收线,将机器人拽出,防止事 故的发生。 故的发生。
• 程进行控制外 还要求操作者根据车载红外传感自 程进行控制外,还要求操作者根据车载红外传感自 动避障,这就是自动控制作业方式 这就是自动控制作业方式。 动避障 这就是自动控制作业方式。 • 由于清扫机器人作业控制较为简单,只要实现启 由于清扫机器人作业控制较为简单, 停止、 动/停止、正反转以及调速功能,另外单片机还可 停止 正反转以及调速功能, 以控制真空泵电机的工作, 以控制真空泵电机的工作,因此对清扫机器人的 控制就是对直流电机的控制。 控制就是对直流电机的控制。 • 3.2电机控制的单片机实现 电机控制的单片机实现 • 电机的控制我们采用 电机的控制我们采用PWM调速工作方式: 调速工作方式: 调速工作方式 • 单极性工作制。单极性工作制是单片机控制口一 单极性工作制。 端置低电平,另一端输出PWM信号,两口的输出 信号, 端置低电平,另一端输出 信号 切换和对PWM的占空比调节决定电动机的转向和 切换和对 的占空比调节决定电动机的转向和 转速。 转速。