基于模糊逻辑的自主车辆控制综述(IJEME-V7-N2-5)
基于模糊控制的电动汽车动力传动系统控制
基于模糊控制的电动汽车动力传动系统控制随着环保意识的增强和新能源汽车的快速发展,电动汽车已成为人们日常交通出行的重要选择。
电动汽车的核心是电动汽车动力传动系统,它由电机控制器、电池、减速器和传动机构等组成,控制整车的运动和速度。
为了实现更加精准和高效的电动汽车动力传动系统控制,本文提出了一种基于模糊控制的电动汽车动力传动系统控制方法。
电动汽车动力传动系统控制的主要任务是实现电能的高效转换和动能的精准控制,以保证车辆的安全性和运行效率。
传统的控制方法主要基于PID控制器进行调节,但是PID控制器仅仅能实现单变量的线性控制,对于多变量、非线性和不确定性较大的电动汽车动力传动系统控制具有较大的局限性。
因此,需要采用一种更加灵活和高效的控制方法,以满足电动汽车动力传动系统多变量和非线性控制的需求。
2. 模糊控制的基本原理和应用模糊控制是一种基于模糊逻辑推理的控制方法,具有较强的鲁棒性、自适应性和非线性控制能力。
模糊控制是将模糊集合论应用于控制系统中,通过定义模糊化的输入和输出量,利用模糊逻辑运算规则进行推理,经过模糊解模糊化得到控制信号的过程。
模糊控制广泛应用于工业控制、智能控制和自适应控制等领域。
基于模糊控制的电动汽车动力传动系统控制方法分为两个层次:基础层和高级层。
基础层主要负责传感器数据采集和信号处理,通过传感器采集车速、电机运行状态等输入量,进行信号处理,提供给控制器进行计算和决策。
高级层是控制器,它采用模糊控制算法进行数据处理和输出控制信号,以控制电动汽车动力传动系统。
4. 模糊控制器的设计和实现模糊控制器是基于模糊控制算法实现的,主要包括模糊化、规则库、推理和解模糊化四个模块。
模糊化模块将模糊控制输入量转化为模糊变量,规则库模块定义了模糊规则库和评估函数,推理模块利用模糊规则库和评估函数进行推理和决策,解模糊化模块将输出的模糊控制信号变为清晰的控制信号。
在实验中,基于模糊控制的电动汽车动力传动系统控制方法得到了验证。
基于模糊自适应PID的智能车辆路径跟踪控制
智 能控 制 理论 的 发展 ,这些 先 进 的控 制技 术 也逐 渐 被 应用 于 智能
车辆 控制 系统 上 ,本文 将 常规 PD I 与模 糊控 制思 想相 结合 ,用 一种 模 糊 自适应PD 制方 法实 现 了智能 车辆 的路 径跟 踪 ,并相应 地给 I控
2 车 辆 位 姿 误 差 模 型
T CHNI OR E C F UM/ 术 论 坛 I O o 技 2 l/2 1
基于模糊 自适应 P 的智 能车辆 路径跟踪控制 I D
L ne F l w i Cont ol orI el ge a olo ng r nt l ntVehi e Ba ed on F z f i cl s uz y Ada i e PI ptv D
1 引言
研 究热 点 。智 能车 辆 在运 行 过 程 中 由控 制系 统感 知 和检 测 道路 信
控 制系 统 是决 定 智能 车辆 整 体 性能 好坏 的关键 。学 者们 针 对 智能
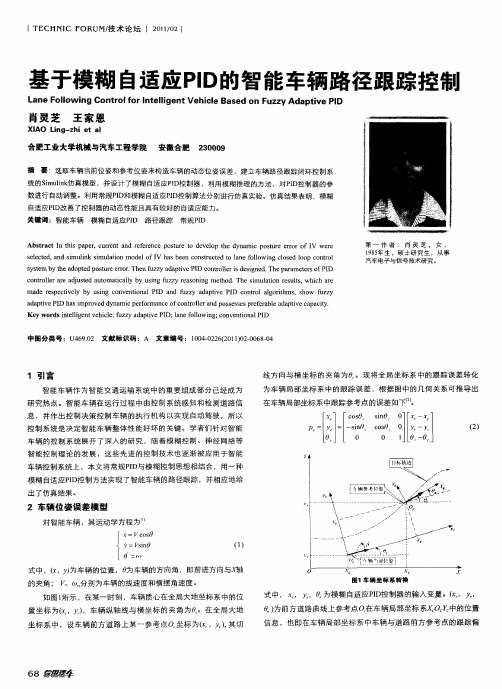
线 方 向与 横坐 标 的 夹 角 为 。现 将全 局 坐标 系 中的跟 踪 误 差转 化
在 车辆 局部坐 标 系 中跟 踪参 考点 的误 差如 下 。
m a e r s c i e y b sn o v n i n l P D n uz y a a i e P D o to l o ih s h w z y d e pe t l y u i g c n e t a I a d f z d pt I c n r l ag rt m ,s o f z v o v u
第 一作 者 : 肖灵 芝 ,女 , 18 年生 ,硕 士研 究生 ,从事 95 汽车电子与信号技术研 究。
cnrl r r dutda tmaiayb s gfzyrao igmeh d T es lt nrsl , hc r o t l eajse uo t l yui z esnn to . h i ai eut w i ae oe a cl n u mu o s h
基于模糊推理的汽车辅助驾驶系统控制算法

节 节 气 门 或 制 动器 , 自车与 前 车 保 持 期 望 的 安 全距 离 。距 离 使 控 制 包 括 上位 控 制 和 下 位 控 制 。 位控 制根 据 传 感 器 获取 的 自 上 车 与 前 车 的相 对 速 度 和 相 对 距 离 . 定 使 自车保 持 期 望安 全 距 确 离 所 需 要 的 加速 度 ; 下位 控 制 则 用 以实 现期 望 的加 速 度 。
目 前 ,国 内 外 对 上 位 控 制 器 的 设 计 采 用 了许 多 方 法 , 如 PD 控 制 、 模 控 制 等【 在 上 位 控 制 器 的设 计 中除 了 考虑 系统 I 滑 l 1 。
是 否 构 成Leabharlann 安全 隐 患 , 在 不 安 全 情 况 下 , 并 自动 采取 措 施 控 制 汽 车 . 汽车 能 主动 避 开 危 险 , 证 车 辆 安 全 行 驶 。 本结 构如 图 使 保 基
Ap l a o s 2 0 4 ( ) 2 1 2 3 p c t n , 0 7,3 7 : 2 - 2 . i i
Abta t n ti p pra d vras t c ytm m dli peet rta d i i p it u ta s i n e dii e sr c:I hs ae r e—sia ess o e s rsne fs n t s on d ot ht a s g t r n b — i sn e di e t  ̄i h vg
E ma ly l i g u @ 1 3 c m - i: u i n g o 6 .o p
YU - lg. U F s e gAlo i m fr rv r sitn e s se Li pn LI a— h n . g rt h o d e assa c y tm b s d o uz y i fr n eCo p tr En i e rn n i ae n f z n e e c . m ue gn e ig a d
基于模糊PID的智能汽车控制系统
2009年9月第16卷第5期控制工程C o n t r o l E n g i n e e r i n g o f C h i n a S e p .2009V o l .16,N o .5文章编号:1671-7848(2009)05-0618-05 收稿日期:2008-06-27; 收修定稿日期:2008-08-13 作者简介:潘学军(1966-),男,辽宁沈阳人,副教授,博士,主要从事复杂工业过程优化与控制、先进控制技术应用等方面的教学与科研工作。
基于模糊P I D 的智能汽车控制系统潘学军,张兆惠(大连理工大学信息与控制研究中心,辽宁大连 116023)摘 要:针对道路标志线特征提出准确而快速的道路检测的方法,在此基础上对人-车-路闭环系统进行分析。
汽车动力学系统具有较强的非线性特性,很难用传统的方法建立准确模型,因而应用基于专家经验的模糊P I D 控制方法对系统进行研究,讨论P I D 参数的自适应整定方法,并建立控制系统。
同时在研究的基础上设计开发了一款基于单目视觉的智能汽车模型。
实验证明,所建立的控制系统能够正确而快速地对预期轨道进行检测和跟踪,能够较好地完成对智能汽车的控制。
关 键 词:智能汽车;模糊P I D 控制;图像处理;控制系统中图分类号:T P 273 文献标识码:AF u z z y P I DC o n t r o l S y s t e mf o r I n t e l l i g e n t V e h i c l eP A NX u e -j u n ,Z H A N GZ h a o -h u i(R e s e a r c h C e n t e r o f I n f o r m a t i o n a n d C o n t r o l ,D a l i a nU n i v e r s i t y o f T e c h n o l o g y ,D a l i a n 116023,C h i n a )A b s t r a c t :Am e t h o d i s i n t r o d u c e d t o m a k e i n t e l l i g e n t v e h i c l e i d e n t i f y t h e a n t i c i p a n t t r a c kq u i c k l y a n dp r e c i s e l y ,a n d t h e d r i v e r -v e h i -c l e -r o a d c l o s e d -l o o p s y s t e mi s a n a l y z e d .T o t h e d i f f i c u l t y o f d e s i g n i n g a n a c c u r a t e m o d e l f o r t h e v e h i c l e d y n a m i c s y s t e mw i t h s t r o n g n o n -l i n e a r c h a r a c t e r i s t i c s ,a f u z z y P I Dc o n t r o l l e r i s i n t r o d u c e da n da c o n t r o l s y s t e m i s d e s i g n e d .T h e f u n c t i o na n dc o n t r o l s t r a t e g y o f t h e P I Df a c t o r s a r e d i s c u s s e d .E x p e r i m e n t s s h o wt h a t t h e d r i v e r m o d e l p r o v i d e s b e n e f i t s t o t h e i n t e l l i g e n t v e h i c l e s y s t e ma n d i t i s a b l e t o f o l -l o wt h e a n t i c i p a n t t r a c k a c c u r a t e l y a n dq u i c k l y .K e yw o r d s :i n t e l l i g e n t v e h i c l e ;f u z z y P I Dc o n t r o l ;i m a g e p r o c e s s ;c o n t r o l s y s t e m1 引 言智能汽车自主驾驶技术的研究在公路管理、交通运输等方面有着广阔的应用前景,受到广泛的重视。
基于模糊控制的电动汽车控制系统设计

基于模糊控制的电动汽车控制系统设计电动汽车在未来能够成为主流交通工具的前提是需要控制系统的支持,而基于模糊控制的电动汽车控制系统,则能够更加高效地实现对电动汽车的控制。
下面,本文将对基于模糊控制的电动汽车控制系统的设计做出详细分析。
1. 电动汽车控制系统概述电动汽车控制系统主要包括电机控制器、电池管理系统、制动系统、转向系统及车身稳定控制系统等。
其中,电机控制器是电动汽车控制系统的核心部分,它能够对电动汽车的动力系统进行控制,从而控制电动汽车的加速、减速等操作。
2. 模糊控制技术介绍模糊控制技术是一种基于人类直觉的控制方法,它通过建立模糊规则来处理各种不确定性问题,包括非线性、时变和复杂的动态系统。
模糊控制是一种组合式控制方法,可以实现多种控制方法的优化组合,从而得到更好的控制效果。
3. 基于模糊控制的电动汽车控制系统设计基于模糊控制的电动汽车控制系统要实现的功能包括电机调速、制动控制、转向控制、车身稳定控制等。
其中,电机调速是最核心的部分,主要是为了控制电动汽车的加速、减速和定速巡航等操作。
在电机调速的过程中,需要考虑电机的动态特性、负载的变化、环境温度和湿度等多种因素,以确保电动汽车的性能稳定性和安全性。
为了实现针对这些复杂关系的控制,可以通过建立模糊控制规则来实现对电动汽车系统的控制。
模糊控制器的输入是基于传感器采集的实际工作参数,包括电机转速、电机负载、电压和电流等;输出是电机电量,也就是电机的功率控制信号。
为了更好地实现基于模糊控制的电动汽车控制系统的设计,设定以下模糊规则:- 根据电机负载、电机转速、电机电流等参数输入,控制电量的输出信号。
- 当电动汽车的负载增加时,控制器倾向于输出更高的电量。
- 当电机转速增加时,对电机的电量输出应较为平缓,以保证电动汽车的平稳加速。
- 在电动汽车停止或制动时,控制器应输出零电量。
通过使用模糊控制器来控制电量输出,就能够更加智能、灵活和高效地实现对电量的控制,进而实现电动汽车的系统控制。
基于模糊逻辑的智能车辆控制技术研究
基于模糊逻辑的智能车辆控制技术研究近年来,随着智能化、自动化的发展,车辆智能化技术得到了广泛关注和应用。
在智能车辆控制技术中,模糊逻辑作为一种强大的工具,在处理复杂问题和提高智能化程度方面具有重要的应用价值。
本文将探讨基于模糊逻辑的智能车辆控制技术研究。
一、模糊逻辑介绍模糊逻辑是一种用来处理模糊信息的逻辑方法,是一种基于模糊概念的逻辑。
模糊逻辑研究的是不精确和不确定的信息,它不是二元思想的延伸,而是通过灵活的处理模糊信息,把事物之间的关系表示出来。
模糊逻辑具有可扩展性强、易于建模、计算量小等特点,是处理复杂问题的有效工具。
二、智能车辆控制技术智能车辆控制技术是一种通过植入感应器和计算机等智能设备,实现对车辆进行自主控制的技术。
通过智能化技术,车辆可以自动感知周围环境,通过内部算法进行决策和操作,从而实现驾驶员的部分或全部任务。
该技术可以大大提高车辆的安全性、路况适应性和驾驶舒适度,并在未来的出行方式中扮演着重要的角色。
三、基于模糊逻辑的智能车辆控制方法研究智能车辆控制过程中,模糊逻辑技术可以应用于对车辆行驶环境、车辆状态等信息进行模糊处理,并通过各种模糊控制算法进行计算和决策,从而实现车辆的智能化控制。
1、环境感知与模糊逻辑处理车辆智能化控制的基础是对周围环境的感知。
通过感应器、雷达、摄像头等设备对车辆行驶环境进行实时监测,并通过模糊控制算法进行模糊处理,在一定程度上提高车辆的精准性和适应性。
例如,对于车辆的自动驾驶功能,通过在车身周围安装众多感应器和摄像头,可以对车辆周围环境进行全面感知,并对路况进行模糊分类。
通过模糊分类可得出当前路况下的最佳行驶速度和方向,从而进行自动驾驶。
模糊处理技术可以灵活处理不同情况下的路况,保障车辆的安全行驶。
2、状态识别与模糊逻辑算法车辆的状态可以通过车辆内部的传感器进行监控,如发动机转速、油门状态、油耗等,在此基础上,通过模糊逻辑算法对车辆状态进行模糊处理,确定最佳的控制方式和调节参数。
基于模糊逻辑的车辆控制系统设计

基于模糊逻辑的车辆控制系统设计车辆控制系统是现代汽车技术中不可或缺的一环,它的设计和实现需要多种技术手段的综合使用。
其中,基于模糊逻辑的车辆控制系统因其具有的自适应性、鲁棒性、抗干扰性等特点,成为目前车辆控制领域的研究热点之一。
本文将围绕基于模糊逻辑的车辆控制系统设计展开讨论,包括其中的核心技术原理、系统结构和实现方法等。
一、模糊逻辑在车辆控制中的应用模糊逻辑是一种用于处理不确定性问题的数学方法,它可以将不确定的概念(如“高”、“低”、“快”、“慢”等)用数学方式映射为数值变量。
在车辆控制中,模糊逻辑可以用于对车辆速度、转向角度、刹车等操作的控制。
以控制车辆速度为例,传统的速度控制系统通常采用PID控制器来实现。
但是,PID控制器需要精确定义每个控制量的取值范围和控制律,这对于速度变化范围较大的车辆来说是一个挑战。
相比之下,模糊控制可以通过定义一组模糊的控制规则,将车辆的速度控制在一个合理的范围内。
例如,可以用模糊规则来定义:当车辆速度过快时,应适当减速;当车辆速度过慢时,应适当加速。
这样,在不同的情况下,模糊控制器会根据实时的车速数据自适应地调整控制规则,从而实现更加优秀的控制效果。
因此,模糊控制在车辆控制中的应用、研究和实现领域是非常广泛的。
二、基于模糊逻辑的车辆控制系统的结构基于模糊逻辑的车辆控制系统由两个主要模块组成:前端传感器模块和后端控制器模块。
前端传感器模块用于从车辆周边环境感知并获取相关输入信号。
该模块通常由多种传感器组成,例如视觉摄像头、激光雷达、GPS定位系统等。
这些传感器可以实时获取车辆周围的道路情况、车辆位置、障碍物位置和速度等信息,然后将这些信息传输到后端控制器模块中进行处理。
通过不同传感器之间的信息交互和融合,前端传感器模块可以实现车辆的全景感知和智能化决策。
后端控制器模块是整个车辆控制系统的核心,主要负责处理前端传感器模块提供的输入信号,并输出对车辆速度、转向角度、刹车等操作的控制信号。
基于模糊神经网络的自主车导向控制器
网络的 自主车导 向控制器 , 立了模糊 神经 网络控制器 的结 构 , 由实验数据产 生训 练样本 。该控制器通 过精确控 建 并 制两个驱动轮的差 动转速实现路径 跟踪 。实 验结果表 明采 用模糊 神经 网络的导 向控 制器能够稳定地 实现 跟踪导 向 路径的控制功能. 关 键 词: 自主车 ; 神经网络 } 向控制 导
文献标识码 ; A 中 图分 类 号 : P 4 T 2
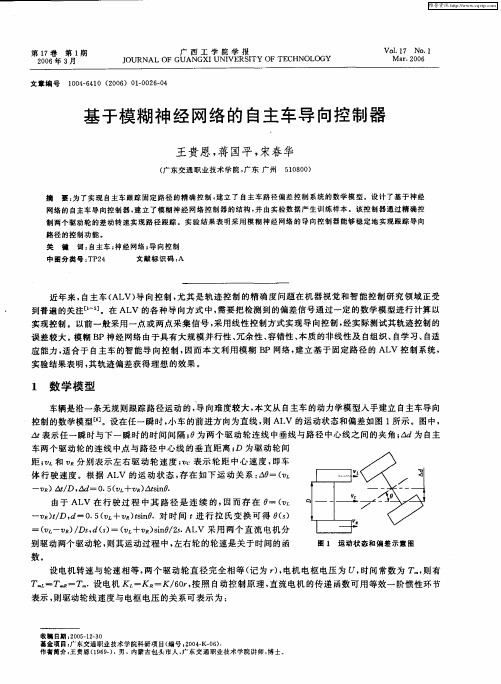
近年 来 , 自主 车 ( V) 向 控制 , 其 是 轨 迹 控制 的 精确 度 问题 在 机 器视 觉 和智 能 控制 研 究 领域 正 受 AL 导 尤 到 普遍 的关注 引。在 AL 的各 种 导 向方式 中 , V 需要 把 检测 到 的偏差 信号 通 过一定 的 数学模 型 进行 计算 以 实 现控制 。以前一 般采用 一点 或 两点 采集 信 号 , 采用 线性 控 制方式 实现 导 向控 制 , 实 际测试 其轨 迹控制 的 经 误 差较 大 模 糊 B P神 经 网络 由于具 有大 规模 并 行性 、 冗余 性 、 错性 、 容 本质 的非 线性 及 自组织 、 自学 习、 自适 应 能力 , 适合 于 自主 车 的智能 导 向控制 , 因而 本 文 利 用模 糊 B 网络 , 立 基 于 固定 路 径 的 AL 控 制 系统 , P 建 V 实 验结果 表 明 , 其轨 迹偏 差 动过程 中 , 右 轮 的轮 速是 关 于时 间的 函 则 左
数。
设 电机转 速 与 轮速 相 等 , 个 驱 动 轮直 径 完 全 相 等 ( 为 , , 两 记 一 电机 电枢 电压 为 【, ) , 时间 常 数 为 T , 有 m则
=; ; = .
表示 任一 瞬时 与 下一 瞬 时的 时 间间 隔 ; 两个 驱 动 轮连 线 中垂线 与路 径 中心线 之 间 的夹 角 ; 为 自主 0为 △
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I.J. Education and Management Engineering, 2017, 2, 41-49Published Online March 2017 in MECS ()DOI: 10.5815/ijeme.2017.02.05Available online at /ijemeFuzzy Logic-Based Control for Autonomous Vehicle: A SurveyIshaya Emmanuel*Usmanu Danfodiyo University Sokoto, 84004, Nigeria.AbstractFuzzy set, since its advent has played an important role in control systems and many other area of applications. One o f such area is the control of autonomous vehicle. There seem to be some difficulty however, for a new timer trying to get a clear picture of the autonomous navigation problem. To this end, this survey presents a panoramic view of the Intelligent Transportation Systems with some few example of the Advance Driver Assistance Systems and a good discussion on the autonomous systems with its eminent problems. More attention was focused on the fuzzy controllers designed for collision avoidance; as its performance has largely simplified and smoothens the collision avoidance process of an autonomous vehicular system.Index Terms: Fuzzy Logic, Autonomous Vehicle, Robot, Obstacle Detection, Collision avoidance.© 2017 Published by MECS Publisher. Selection and/or peer review under responsibility of the Research Association of Modern Education and Computer Science.1.IntroductionFrom the very onset, researchers have sort for ways to replace the human operator, that is pliable and susceptible to errors, with some sort of machinery –that is less prone to error, effective, efficient, and never complains of tiredness due to monotonous routine. It is as a result of this quest the technological community has experienced a revolution taking forms like: at its primitive stage, implementation of devices that aid simple calculation to a more complex stage that constitutes the application of machinery and machine systems for industrials production processes; this also entails the use of robotics for surgical procedures [1, 2, 3] and autonomous devices for planetary explorations. More recently, these technological advancements resulted to the implementation of simple but powerful household [4] robots for domestic chores like laundry, vacuum and dishing to a more complex task handling robots like the mobile nurse [5] implemented to assist bedridden patients.Another interesting aspect of this revolution is the implementation of vehicular systems capable of driving along country and urban settings [6, 7, 8] without human aid of whatsoever form. Nowadays, virtually every process can be automated by some intelligent machine and controllers as evident in [9] which reported that the Corresponding author.E-mail address:International Federations of Robotics concluded that there have been a 19% increase in the use of robots with a statistics of 86,200 to 106,300 units in just a space of three years –2004-2007. The aforementioned revolution gave birth to an art (Intelligent Transport Systems) which focuses on the implementation of Advance Driver Assistance Systems (ADAS) and Automatic Ground Vehicle (AVD) as some call it, or Unmanned Ground Vehicle (AVG) as others see it. Whichever name it is called, the idea or rationale is to design and implement a vehicular system capable of simulating the human driving operation and do it very well. The need to implement ADAS and AVG boils down to the fact that, since human drivers’ factors are responsible for about 95% of road accidents [10, 11], which can be attributed to the human susceptibility pointed earlier, it is believed however, that a well programed autonomous vehicle should outperforms the human drivers; or better still, a set of warning systems can assist the driver with promptings of potential collision or information about the environment. This has been the goal and a successful one (to some extent) since report [13] has it that the use of ADAS (Adaptive Cruise Control- ACC) considerably reduced the chances of vehicle collision. Many ADAS systems have been proposed and some implemented in the top class cars of some automakers. Few of these are: Adaptive Cruise Control System that helps to keep reasonable distance between front cars and the ADAS aided system by regulating vehicular speed; [11] presents a rich survey on Intelligent Collision Systems and ACC; Lane Detection System [16] helps maintain track by detecting the road lanes; speed bumps detector [15]; potholes detectors [16, 17, 10]; Overtaking Maneuver Systems [18]; Car Parking System, Terrain Classification System [19, 20, 21, 8], etc. Although, the ADAS systems have considerably helped the driving process, however, the need to implement a fully autonomous vehicle cannot be undermined since its use has gained grounds in medical and military reconnaissance, exploration of terrains yet safe for humans, media report in war infested zone, etc. As such, efforts have been channeled to the design and implementation of autonomous vehicle by researchers from all around the world. To serve as incentive to researchers in the art, challenges have been organized in different countries aimed at exploring a given navigation problem. Example of such is the DARPA Urban Challenge won by [22], The Vehicle Following Problem, etc. Other problems explored in the art are: Lane and Wall Following Problems, Search and Rescue Robot implementation, Children Cone Play Simulation Problem, etc. These have gone a long way in the automation of navigation process as there now exists sophisticated but easy to use sonar, range finders and cameras; development of libraries (e.g. OpenCV) and API’s (Application Programming Interface) that ease the robot’s implementation process; and design of fast image processing schemes [52]; miniaturized rovers and mechatronic/mini robots’ devices for prototyping, etc. However, much work is still in progress with the aim of making the autonomous vehicle capable of working in real-timing with high speed. It is along this line of thought this review focuses on presenting an overview of the autonomous vehicle system with few literatures in the art as there exist tons of published papers on this subject. This work also presents brief discussion on the fuzzy logic-based controllers which stands as the heart of this peer review. The paper is organized thus: the following section ushers an overview of autonomous vehicle, followed by section three –discuses fuzzy control systems, next is section four –presents some fuzzy controllers, and section five concludes the work.2.Autonomous VehicleAutonomous vehicle design and implementation started gaining attention in the research community around late 80’s and early 90’s [11], this may be attributed to the fact that their use has gained ground in medicine, military reconnaissance, industrial applications, domestic appliances, touring guide etc. Albeit any area autonomous robot has been employed, its fundamental operation is to move from one part to another while recognizing obstacle and providing means for collision avoidance in the process. This however, boils down the navigation process into obstacle detection and collision avoidance, hence the two major problems in the art. For an autonomous vehicle to successfully accomplish the task of moving from one point to another, it needs to have the mechanism that enables it know what the environment looks like. This implies the use of vision systems that provid e the autonomous robot with the ability to detect obstacle and act befittingly. Although, other means that requires the use of model representation of the world, as will be seen shortly, are in place forobstacle-free path planning, however, a vision system enables the robot to better thrive in an environment characterized with uncertainties –an inherent characteristic of the urban or country settings. This vision system consists of sensors and image processing algorithms for obstacle detection; examples of some sensors often used are:•RADAR: radio detecting and ranging e.g. sonar, ultrasonic sensors, etc.•LIDAR: Light Detecting and Ranging e.g. IR sensor,•Stereo imaging: the use of either two or single camera for acquiring a 3D or 2D image representation of the environment respectively.It is noteworthy herein that while the use of Stereo imaging systems gives more information about the environment, it however requires complex calculations that often constrains the real-time operation of the robot [12]. On the other hand, sonars are fast in operation and simple to implement even though their use is restricted to ranging and obstacle pinging without any information about the environment, except maybe in case of multi-sensor systems as would be seen shortly. Operating concurrently with the obstacle detection system is the collision avoidance mechanism that bespeaks the robot’s ability to either stop when an obstacle is pinged or employ some control decision to detour around the obstacle. Devices that aid the avoidance process are controllers –these make decision, and actuators that perform the task. Subsequent section shed more light on controllers, for now, examples of some actuator are steeper motors, DC motors, servo, etc. interested readers should consult [25] for more examples of actuators. The obstacle detection and collision avoidance subsystems makes up the autonomous vehicle system, hence the subsequent subsection presents brief review of these.i.Obstacle DetectionSome classifications exist for obstacl e detection systems, one of which, is the Qualitative and Quantitative obstacle detection approach proposed by Zhang et al. [25]. By qualitative, the authors meant, obstacle detection system whose results hinge on the presence or absence of obstacle without further information; in this vein, they proposed the Known Ground Plane and the Unknown Ground Plane algorithms for obstacle detection. On the quantitative side, they proposed a third algorithm that computes a partial 3D structures of the obstacle. Polarizing proposed literatures according to this categorization for obstacle detection in the art, [26, 25] polarizes to the qualitative obstacle detection approach and the schemes found in [27, 25, 19, 7, 23, 28] categorizes as the quantitative obstacle detection approach. Another interesting concept is the Multi-sensor approach for obstacle detection. Systems deployed with this approach constitutes the use of different sensors (radar, stereos, sonar) for obstacle detection. This approach also introduces the concept of data/sensor fusion architecture whereby all information from the sensors are fused to produce inputs to the control systems. [6, 8, 29] are some of the literatures that explored this approach.ii.Collision AvoidanceXu et al. [30] categorizes the approaches employed to solve the navigation control problem into: model-based method and fuzzy logic with the neural network reactive based methods. Interested readers can consult [31, 32] for more on the model based method of collision avoidance schemes. Fuzzy logic and Neural network reactive has been combined for a fine, robust and adaptive control, however, fuzzy logic, by itself, can achieve a fast and considerably smooth control as seen shortly. Although difficult to place under any of the subsections, mobile robot’s navigation process classification suggested in [33] on autonomous robot need some audience. The authors presented three categorization proponents in the art employed in recent times. First is the model based approach in which the robot maintains a copy of the world’s mod el for obstacle free path planning. [5] applied this method. Sensor based approach [10, 30, 34], which emphasizes only the use of sensors information about the environment for navigation decision. And last on the list is Hybrid approach. Systems [35, 5]deployed with thisapproach combine both model and sensor information for autonomous navigation process. Model in this concept is not restricted to the environment’s map on which the autonomous vehicle operates, but is extended to accommodate both goals and target-based approaches.3.Fuzzy Logic Control SystemsFuzzy logic, since its advent [36] has assumed an important role in control systems; not only in control systems has fuzzy set (as was called at its birth) gain grounds, its use has found place in many areas as presented in [37]. Fuzzy logic was first employed for the control system of a steam engine reported in [38], Hombland and Ostergard presented the first application of fuzzy logic controller in an industrial process for a cement kiln [43]. Nowadays, consumer product’s (vacuu m cleaners, air conditioner, washing machine, etc.) controls are programed with calculus of fuzzy rules (CFR) that tend to increase the Machine Intelligent Quotient [39] by modeling the human expertise using linguistic variables that conceptualizes the fuzziness in human decision making. Unlike conventional controls that often require lot of time and high computational cost, fuzzy logic conceptualizes the human operational experience –of an operator –into a controller that comprises of IF/THEN rules which simulates the operators "know how" in an algorithmic manner made up of fuzzy sets [40]. The ease with which this can be done results to a fall in the cost of consumer products. Fuzzy control systems, unlike expert systems, are made up of four parts thus: th e fuzzifier –this convert crisp input variables to linguistic term in a process known as fuzzification; the rule base houses the IFTHEN rules; the inference module employs if-then rule on inputs to infer the control action as would be done by the human operator; and the defuzzifier is responsible for converting the results into crisp output in a process called defuzzification. Figure 1 [41] depicts a general fuzzy controller with the fundamental processes, however, many methods have been put in place for these process. Example is the MinMax, Centroid or Center of Gravity method used for defuzzification [42]. Fuzzy control systems (FCS) are classified into two types namely: model-free and model based FCS [44]. When compared with its equivalent conventional PID (Proportional Derivative-Integral) control systems, model-free FCS’s show a better performance, which may be accrued to the fact that a lot of work have been directed toward its development. On the other hand, model based fuzzy comprises of Type-1 FCS, Type-2 FCS and Type-3 FCS [45]. Readers interested on getting more insight on the concept of fuzzy control systems can visit [45], this survey contains a comprehensive knowledge on the fuzzy control system and its industrial application that spans from manufacturing, servo controls, robotics, up to automotive. For light on the emerging Hybrid systems –fuzzy logic plus soft computing methodology e.g. neural network, genetic algorithm etc. –readers can consult [46]. Others who may wish to explore fuzzy logic networked systems can check [44] as the authors have done justice to the subject and also provided future trends to help researchers sail with the tide. This paper would be lacking if the brilliant work done in [37] is not lay bare; as it presents a well packed survey on the fuzzy software systems in virtually all the application areas of fuzzy logic which include GIS, image processing, handwriting recognition, etc.4.Fuzzy Controllers for Autonomous VehicleAs evident in the previous section, fuzzy controllers, due to their higher speed and smooth control [47], are better option to tackle the real-time issue [32] of obstacle detection and avoidance control in autonomous navigation. As such, this section presents selected literatures that employed fuzzy algorithm in the art. However, this review article presents contributions from different literatures without any critique of whatsoever to the researchers’ effort. Beom and Cho [34] proposed: A Sensor Based Obstacle Avoidance Controller for a mobile robot using Fuzzy Logic and Neural Network. Herein, the implemented robot (LCAR), equipped with a set of eighteen ultrasonic sensors, uses neural net work (aka Situation Classifier) to estimate the obstacle(s) position from range image; the distance to the obstacle, heading angle and obstacle direction constitute the fuzzy input variables with increasing steering angle and velocity as the outputs. Xu et al. [30] employed fuzzy logic for real–time reactive control in navigating an intelligent autonomous robot in a changing environment having multiple static obstacles of different form. Fuzzy logic was used to navigate an obstacle away from trap and endless loop –the local trapping and oscillating wandering problem –by using the new virtual target location, obtained from the "local target switching scheme", and the perspective distances of the obstacle to steer and accelerate the wheel and steering of the mobile robot (Nomad 200). Hodge and Trabia [48] proposed a "Steering Fuzzy Logic Controller for an Autonomous Vehicle" that simulates the human reasoning approach for avoiding obstacles. The scheme separates the obstacle avoidance process into a set of task handled by modules implemented as fuzzy controllers.Fig.1. Basic Configuration of a Fuzzy Logic SystemFirst is the driving task that further consist of target steering plus obstacle avoidance steering; next is the bug steering module that handles the problem of trapping and wandering, and last is the module that handles the vehicles orientation in respect to its goal. In all cases, except the orientation controller, appropriate inputs (steering angle, target angle and obstacle’s distance) are fuzzified to yield corrected steering angle. Narouzi et al. [47] improve their previous work –Recursive Line Extraction Algorithm from 2D Laser Scanner Applied to Navigating a Robot –by proposing a fuzzy controller for the navigation scheme implemented on a search and rescue robot (NAJI V). The fuzzy controller decides path using lines and fusion data obtained from Lasar and sensors. In practice, the Lasar scanner provides the fuzzy controller with distance and angle of obstacle for command generation. On the contrary, if the scanner information contains obstacle and wall, sonar information is combined with obstacle distance for navigation. Depending on the output membership function, eight fuzzy rules assigns positive or negative (forward or backward) speed to the wheels, hence by concurrent assigning values to the speed and steering angle, the robot is able detour an obstacle without stopping. Gardeazabal et al.[50] combined image processing and Type-I fuzzy algorithm to implement an obstacle avoiding mobile robot which uses information (i.e. object distance and attack angle) from a stereo vision camera to generate fuzzy rules that control the collision avoidance process. The proposed fuzzy controller processes the object distance and the attack angle to yield a tun ed velocity for the robot’s navigation along its preprogrammed circular trajectory. Baasandorj et al. [50] implemented a path planning and obstacle avoidance algorithm using Modal Predictive Control and fuzzy logic in a rather complex environment consisting of static and mobile obstacles. The scheme applied fuzzy logic to control obstacle detection and determines the robot’s orientation. Ultrasonic sensors provide the distance and angle, of the nearest obstacle in relation to the goal, these represent the inputs and the heading angle as the output. Bounini et al. [14] in their work, "Autonomous Vehicle and Real Time Lanes Detection and Tracking", applied fuzzy rules to maintain the position of vehicle at the center of the right lane. In operation, the fuzzy controller generates steering angle in relation to the vehicles direction that keep and track the center of road lanes. Cao and Hall [33] employed command fuzzy technology in a hybrid approach for the navigation of an autonomous guided rover (BEARCAT). With the aid of CCD cameras and Plaroid sensors, BEARCAT was able to detect lanes for maintaining track and to detect obstacle respectively.Center of gravity defuzzification method defuzzifies output from each behavi oural controllers. Maslak and Butkiewiez [51] presented sonar based approach for autonomous navigation vehicle equipped with a pair of GPROA21 distance IR (Infrared Sensor), DFRduino motor shield and Arduino Uno microcontroller for obstacle sensing and collision avoidance actuation. A five fuzzy rul e controller having distance as input represented with three linguistic variables and angle of drive as output was design for the collision avoidance process. The authors converted angle of drive into differential drive speed on the wheels thereby allowing the vehicle to detour obstacle. Thongchai and Kawamura [42] implemented a behavior based Multi-sensor obstacle detection and avoidance robot (HelpMate) designed with a set of behaviors that ranks from the highest to lowest thus: task oriented –divides into goal and wall following, obstacle avoiding and emergency behavior. A fuzzy controller module was designed for each behavior having inputs (distance of obstacle) from all sonar represented using Gaussian membership function. Method of centroid defuzzifies ou tputs (angular velocity) for HelpMate’s navigation. Claudia et al. [12] proposed a simple image processing; and Gaussian-noise robust algorithm using 3D depth sensors (Xtion Pro Live) for obstacle(s) detection. The proposed algorithm employs Kolmogorov-Smi rnov test for image processing, these yields obstacle’s distance and angle fed to a scalable fuzzy controller which, using fine linguistic variables, generates steering angle and wheel speed for collision avoidance. Gazebo Simulator was used to validate the proposed scheme. It is noteworthy at this juncture that fuzzy logic is not constrained to the implementation of control logic for autonomous robot, it has also been used in the obstacle detection process. Example is the work of Zoubir and Abdelnaheb [52] who employed fuzzy rules for the fast detection of edge in stereo images processing. Cabreira et al. [53] also used fuzzy obstacle detection function, constantly called to estimate the closeness of obstacle to the robot in the path selected by a genetic algorithm. As stated earlier, this work only presents few literatures in the art, however the literature contained herein can set a foundation for a starter in the art.5.ConclusionThis work started by presenting a background to the autonomous navigation problem for the unmanned ground vehicle; this further enumerate some ADAS systems which is another good research area for those interested in intelligent transportation systems. It continued by bringing to spotlight the need for vehicles to be fully autonomous notwithstanding the many ADAS systems already in play in the automobile industries. A detailed description of the autonomous problem was discussed with different classification of the methods/approaches employed to address the obstacle detection and avoidance problem. This featured the qualitative and quantitative obstacle detection algorithms. As for the collision avoidance problem, the conventional model-based methods consisting PI and PID approach was juxtaposition with the fuzzy logic plus neural networ k reactive based approach. A whole section was dedicated to fuzzy logic control system’s review, and pointers where placed to direct curious readers to some well-nourished survey papers that are sure to solidify readers’ knowledge of the concept of fuzzy l ogic in various areas of application, and introduces the vast materials, software, models and API’s available for the implementation of fuzzy systems. The author at this point may wish to make clear the fact that some interesting issue –like the multi-obstacle environment that often leads to trapping and oscillating/wandering which is often an issue inherent to target or goal-based approach has not been considered. Also, this work paid no attention to newer trend of multi-agent collision avoidance system; networked obstacle detection and avoidance systems, and the concept of Depth Sensing. Albeit, the information contained herein can however set the ball rolling for a starter in the art.References[1]Z. Hong, Y. Chao, and Z. Lei: A MRI guided robot for neurosurgery: Design and control. Proceedings ofthe IEEE International Conference on Information and Automation, 2008, 1, pp 759-764.[2]S. J. Song, Y. Moon, D. H. Lee, C.B. Ahn, Y. Jo and J. Choi: Comparative Study of Fuzzy PID ControlAlgorithms for Enhanced Position Control in Laparoscopic Surgery Robot, Journal of Medical and Biological Engineering February 2015, Volume 35, Issue 1, pp 34-44.[3]Qinjun, D.: Fuzzy PID control orienting medical robot in minimally invasive surgery. Proceedings of theIEEE International Conference on Automation and Logistics, 2007, 1, pp 2633-2638[4]N. Wakami: Fuzzy control and neural networks: Applications for consumer products, Fuzzy Logic andFuzzy Control Volume 833 of the series Lecture Notes in Computer Science, August 2005, pp 97-105. [5]J. Borenstein and Y. Koren: Obstacle Avoidance with Ultrasonic Sensors. International Journal ofRobotics and Automation, Vol 4, No.2 April 1988. pp 213-218.[6] C. Stiller, J. Hipp, C. Rossing and Ewald: Multisensor Obstacle Detection and Tracking. Image andVision Computing 18 (2000). pp 389-396.[7]N. Kehtarnavaz, N. C. Griswold and J. S. Lee: Visual Control of an Autonomous Vehicle (BART) –TheVehicle-Following Problem, IEEE Transaction on Vehicular Technology, Vol. 40, No. 3, August 1991.Pp 654-622.[8] D. C. Carl, D. G. Armstrong, A. Maryum, S. Solanki, D. MacArthur, E. Zawodny, S. Gray, T Petroff, M.Grifis and C. Evans: Development of an Integrated Sensor System for Obstacle Detection and Terrain Evaluation to Unmanned Ground Vehicle. In Proc. of SPIE Vol. 5804, pp. 156-165.[9] A. M. Adil and U. F. Aziz: Sonar Based Obstacle Detection and Avoidance Algorithm, in IEEEInternational Conference on Signal Acquisition and Processing, 2009, pp 98-102.[10]S. S. Rode, S. Vijay, P. Goyal, P. Kulkami and K. Arya: Pothole Detection and Warning System:Infrastructure Support and System Design, in IEEE international conference on electronic computer technology, 2009, pp 286-290.[11] A. Vahidi and A. Eskandarian: Research advances in Intelligent Collision Avoidance and Adaptive CruiseControl. in IEEE Transactions on Intelligent Transportation Systems, Vol. 4, No. 3, September 2003. Pp 143-153.[12] A., Claudi, D., Accattoli, P., Sernani, P., Calvaresi and A. F., Dragoni: A Noise Robust ObstacleDetection Algorithm for Mobile Robots Using Active 3D Sensors, 56th International Symposium ELMAR-2014… Zadar, Croatia, September 2014, pp 91-94.[13] A. Touran, M. Brackstone, and M. McDonald, A collision model for safety evaluation of autonomousintelligent cruise control, Accident Analysis and Prevention, vol. 31, May 1999, pp. 567-578.[14] F. Bounini, D. Gingras, V. Lapointe and H. Pollart: Autonomous Vehicle and Real Time Road LanesDetection and Tracking, in IEEE Proc. VVPC, 978-1-4673-7637-2/15.[15]G. A. Kiran and S. Muralis: Automatic Hump Detection and 3D View Generation from a Single RoadImage. In Proc. IEEE international Conference on Advances in Computing, Communications and Informatics (ICACCI), 2014. pp. 2232-2283.[16]X. Yu and E. Salaris: Pavement Pothole Detection and Severity Measurement Using Laser Imagin text,(2011).[17] A. Mednis, G, Strazdins, R. Zviedris, G. Kanonirs and L. Selavo: Real Time Pothole Detection usingAndroid Smartphones with Accelerometer, in IEEE of DCOSS, 2011.[18] A. D. Jarnea, R. Dobrescu, D. Popescu and L. Ichim: Advance Driver Assistance System for OvertakingManeuver on a Highway, in IEEE 15th International Conference on System Theory Control and Computing, Romania, October 2015. pp 759-764.[19]R. Manduchi,A, Castano, A.Talukderand L. Matthies: Obstacle Detection and Terrain Cla ssification forAutonomous Off-Road Navigation. Autonomous Robot 18, of Springer Science, Netherland, 2005. pp.81-105.[20]Y. Cheng-peng and Y. Xian: Terrain Classification for Autonomous Navigation using Lasar Sensing. inIEEE of the 1st International Conference on Information Science and Engineering (ICISE) 2009, pp.14571470.[21]M. Bajracharya, B. Tang, A. Howard, M. Turmon, and L. Matthies: Learning Long-Range TerrainClassification for Autonomous Navigation, in IEEE International Conference on Robotics and Au tomation,。