基于US_100超声波测距仪设计
US-100

dispbuf[0] = 10; //显示 "-"
dispbuf[1] = 10; //显示 "-"
dispbuf[2] = 10; //显示 "-"
dispbuf[3] = 10; //显示 "-"
//定时器0中断,用做显示
timer0() interrupt 1 // 定时器0中断是1号
{
uchar dispcount; //自定义寄存器
static unsigned char count=0;
TH0 =(65536-2500)/256; //约2.50MS定时器初值
}
/*******************************************************************************************/
void DisplayLength(unsigned long number)
{
if(number > 4500) //如果大于4.5米,显示 "-"
{
UARTSnd(0X55);
}
/*******************************************************************************************/
void main(void)
{
unsigned long PreLength = 0;
led1 = ~led1;
}
/*******************************************************************************************/
超声波测距系统的设计详解

超声波测距系统的设计详解超声波测距系统是一种基于超声波测量原理进行距离测量的系统。
它利用超声波在空气中的传播速度较快且能够穿透一定程度的障碍物的特点,通过向目标物体发射超声波并接收反射回来的波形信号,从而计算出目标与传感器之间的距离。
下面将详细介绍超声波测距系统的设计过程。
首先,超声波测距系统的设计需要明确测量的范围和精度要求。
根据需求确定测量距离的最大值和最小值,以及所需的测量精度。
这将有助于选择合适的超声波传感器和测量方法。
其次,选择合适的超声波传感器。
超声波传感器一般包括发射器和接收器两部分,发射器用于发射超声波,接收器用于接收反射回来的波形信号。
传感器的选择应考虑其工作频率、尺寸、功耗等因素。
一般来说,工作频率越高,测距的精度越高,但传感器的尺寸和功耗也会增加。
接下来是超声波信号的发射和接收电路的设计。
发射电路负责产生超声波信号,并将其发送到目标物体上。
接收电路负责接收反射回来的波形信号,并将其转换成可用的电信号。
发射电路常采用谐振频率发射,以提高发射效率和功耗控制。
接收电路则需要设计合适的放大和滤波电路,以增强接收到的信号并去除噪声。
然后是超声波信号的处理和计算。
接收到的波形信号需要进行模数转换和数字信号处理,以获取目标物体与传感器之间的距离。
常见的处理方法包括峰值检测、时差测量、相位比较等。
峰值检测法通过检测波形信号的峰值来判断目标距离;时差测量法通过测量发射和接收信号之间的时间差来计算距离;相位比较法通过比较两个信号的相位差来测量距离。
最后是系统的校准和调试。
校准是调整测距系统的参数,使其达到预定的测量精度。
常见的校准方法包括距离校准和零位校准。
调试是对整个系统进行功能和性能测试,确保其正常工作。
在调试过程中需要注意测距系统与其他系统的干扰和噪声问题,并进行相应的抑制和滤波处理。
总之,超声波测距系统的设计涉及到传感器选择、电路设计、信号处理和系统调试等多个方面。
合理的设计和调试能够保证系统的稳定性和可靠性,从而满足测量的要求。
毕业设计方案超声波测距仪的设计方案

毕业设计方案超声波测距仪的设计方案1. 引言超声波测距仪是一种常用的测量设备,可以通过发送超声波信号并接收回波来测量距离。
本文将介绍一种基于超声波的测距仪设计方案,用于毕业设计项目。
2. 设计目标本设计方案的主要目标是设计一种精确、稳定、成本效益高的超声波测距仪。
具体而言,设计要求如下:- 测距范围:至少10米- 测量精度:在0.5%以内- 响应时间:小于100毫秒- 成本:尽可能低廉- 可靠性:能够在不同环境条件下稳定工作3. 设计原理超声波测距仪的工作原理是利用超声波在空气中传播速度恒定的特性,通过测量超声波的往返时间来计算距离。
一般来说,超声波测距仪由发射模块和接收模块组成。
发射模块:发射模块用于发送超声波信号,通常由脉冲发生器和超声波发射器组成。
脉冲发生器用于产生短暂的高频脉冲信号,驱动超声波发射器将信号转换成超声波信号并发射出去。
接收模块:接收模块用于接收反射回来的超声波信号,并将其转换成电信号。
接收模块一般由超声波接收器和信号处理电路组成。
超声波接收器将接收到的超声波信号转换成电信号,并通过信号处理电路进行放大、滤波和波形整形等处理,得到可用的测量信号。
距离计算:通过测量超声波的往返时间,可以计算出距离。
超声波在空气中的传播速度约为340米/秒,因此距离可以通过距离等于速度乘以时间的公式来计算。
4. 硬件设计硬件设计是实现超声波测距仪的关键。
以下是硬件设计方案的主要组成部分:超声波发射器和接收器:选择适当的超声波发射器和接收器是关键。
一般来说,发射器和接收器的频率应该相同,常见的频率有40kHz和50kHz。
此外,发射器和接收器需要具有相匹配的电特性,以确保信号的传输和接收的准确性。
脉冲发生器:脉冲发生器的设计应考虑到发射模块的需求,需要产生高频、短暂的脉冲信号。
常用的脉冲发生器电路有多谐振荡电路和555定时器电路等。
信号处理电路:接收到的超声波信号需要进行处理,以便得到可用的测量信号。
基于超声波技术的距离测量仪器设计
基于超声波技术的距离测量仪器设计随着科技的不断进步,距离测量技术也在不断发展。
其中,基于超声波技术的距离测量仪器具有广泛的应用前景。
本文将介绍基于超声波技术的距离测量仪器的设计。
首先,我们需要了解什么是超声波。
超声波是一种频率高于人类听力范围的声波,通常在20kHz以上。
利用超声波进行距离测量的原理是先发射一定频率的超声波,然后通过接收器接收反射回来的超声波,并根据往返时间来计算出距离。
基于超声波技术的距离测量仪器的设计主要包括三个部分:超声波发射器、超声波接收器和信号处理器。
超声波发射器是用来发射超声波的装置。
它通常由压电晶体构成,当施加电压时,晶体振动并发出超声波。
为了确保发射的超声波具有一定的频率和强度,我们需要选择适当的晶体和供电电路。
超声波接收器是用来接收反射回来的超声波的装置。
它也由压电晶体构成,当超声波碰撞到晶体上时,晶体会产生电荷。
这些电荷经过放大电路放大后,被送入信号处理器进行处理。
信号处理器是用来计算距离的装置。
它可以根据超声波发射到接收的时间差来计算出距离。
具体来说,信号处理器会记录下超声波发射的时间点和接收到超声波的时间点,并计算它们之间的时间差。
然后,根据声波在空气中的传播速度,即声速,可以得出距离。
当然,在设计基于超声波技术的距离测量仪器时,还需要考虑到一些其他因素。
例如,超声波在不同介质中的传播速度会有所不同,因此需要根据实际情况进行修正。
此外,还需要考虑到信号的干扰和噪声等问题,以确保测量结果的准确性。
综上所述,基于超声波技术的距离测量仪器是一种非常有用的测量工具。
它可以应用于各种领域,如工业自动化、建筑测量、机器人导航等。
随着技术的不断进步,基于超声波技术的距离测量仪器的性能和精度也在不断提高,将为我们的生活带来更多便利。
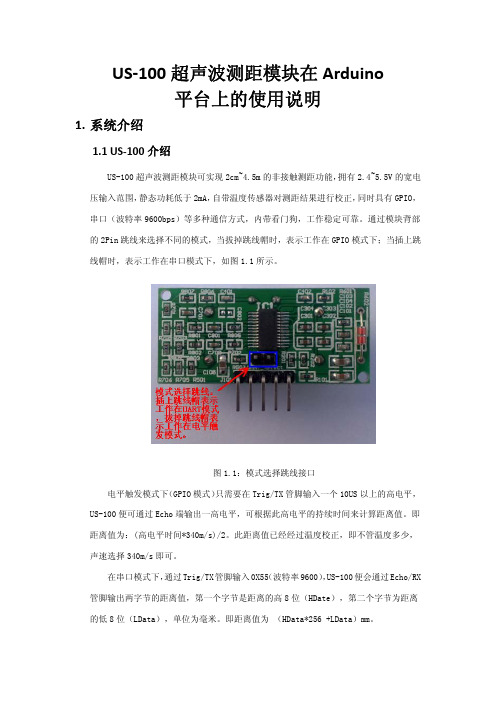
US-100超声波测距模块在Arduino平台上的使用说明
unsigned int TrigPin = 3; //将 Arduino 的 Pin3 连接至 US-100 的 Trig/TX unsigned long Time_Echo_us = 0; unsigned long Len_mm = 0;
void setup() { //Initialize
如果先将 US-100 与 Arduino 连好,再给 Arduino 下载程序,在下载程序时会出错, 因为 US-100 与 Arduino 的通信和 Arduino 下载程序时使用的同一个串口,会相互干扰。
图 3.1:串口模式下 US‐100 与 Arduino 的连接
3.2 串口模式下测距使用例程
}
3.3 串口模式下测温使用例程
int Temperature45 = 0;
void setup() { //将 Arduino 的 RX 与 TX(Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
Serial.begin(9600); //设置波特率为 9600bps. }
Serial.begin(9600); //测量结果将通过此串口输出至 PC 上的串口监视器 pinMode(EchoPin, INPUT);//设置 EchoPin 为输入模式。 pinMode(TrigPin, OUTPUT); //设置 TrigPin 为输出模式。 }
void loop()
{ //通过 Trig/Pin 发送脉冲,触发 US-100 测距
unsigned int HighLen = 0; unsigned int LowLen = 0; unsigned int Len_mm = 0; void setup() { //将 Arduino 的 RX 与 T(X Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
US-100超声波测距模块

1.概述US-100超声波测距模块可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO(通用接口总线),串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数3.本模块实物图及尺寸本模块如图3.1和图3.2所示:图3.1:US-100正面图本模块的尺寸:45mm*20mm*1.6mm。
板上有两个半径为1mm的机械孔,如图3.3所示:图3.3:US-100尺寸图4.接口说明本模块共有两个接口,即模式选择跳线和5 Pin接口。
模式选择跳线接口如图4.1所示。
模式选择跳线的间距为2.54mm,当插上跳线帽时为UART(串口)模式,拔掉时为电平触发模式。
图4.1:模式选择跳线接口5 Pin接口为2.54mm间距的弯排针,如图4.2所示:图4.2:5 Pin接口从左到右依次编号1,2,3,4,5。
它们的定义如下:1号Pin:接VCC电源(供电范围2.4V~5.5V)。
2号Pin:当为UART模式时,接外部电路UART的TX端;当为电平触发模式时,接外部电路的Trig端。
3号Pin:当为UART模式时,接外部电路UART的RX端;当为电平触发模式时,接外部电路的Echo端。
4号Pin:接外部电路的地。
5号Pin:接外部电路的地。
5.电平触发测距工作原理在模块上电前,首先去掉模式选择跳线上的跳线帽,使模块处于电平触发模式。
电平触发测距的时序如图5.1所示:图5.1:US-100测距时序图图5.1表明:只需要在Trig/TX管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX管脚输出。
在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过Echo端输出一高电平,可根据此高电平的持续时间来计算距离值。
超声波测距仪的设计
超声波测距仪的设计1. 引言超声波测距仪是一种常用的测量设备,可以通过发射超声波信号,并接收反射信号来测量物体与测距仪之间的距离。
本文将介绍超声波测距仪的设计原理、硬件设计和软件设计,并提供该测距仪的详细设计过程。
2. 设计原理超声波测距仪的设计原理基于声波在空气中传播的特性。
当超声波信号发送器发出一束超声波信号时,该信号会在物体表面反射,并被接收器接收到。
通过测量超声波信号的发送和接收时间差,可以得到物体与测距仪之间的距离。
3. 硬件设计3.1 发送器设计发送器的设计主要包括超声波发射器和电路控制部分。
超声波发射器是一个压电陶瓷片,通过电路控制部分提供的电压信号激励,产生高频的超声波信号。
在设计过程中,需要考虑发射器的共振频率和驱动电压的选择,以及电路控制部分的电流保护和输出功率控制等。
3.2 接收器设计接收器的设计主要包括超声波接收器和信号处理部分。
超声波接收器接收反射回来的超声波信号,并将其转换为电信号。
信号处理部分对接收到的电信号进行放大、滤波和后续处理,以提取出有效的距离信息。
3.3 距离计算通过测量发送超声波信号和接收超声波信号的时间差,可以计算出物体与测距仪之间的距离。
距离的计算公式如下:距离 = 速度 × 时间差 / 2其中,速度是超声波在空气中传播的速度,通常可以取340米/秒。
3.4 显示与输出设计中可以添加LED显示屏或者数码管等显示设备,以显示测得的距离。
同时,还可以通过串口或者无线通信等方式,将测得的距离输出到计算机或其他外部设备上进行进一步处理。
4. 软件设计在超声波测距仪的软件设计中,通常需要实现以下功能:•控制发送器和接收器的开关状态和工作频率;•读取接收器接收到的信号,并进行处理;•根据接收到的信号计算距离;•将测得的距离输出到显示设备或者外部设备。
在设计过程中,可以使用C/C++等编程语言,结合相关的硬件接口库来实现软件功能。
5. 总结本文介绍了超声波测距仪的设计原理、硬件设计和软件设计。
基于超声波传感器的测距系统设计课程设计说明书(可编辑)
基于超声波传感器的测距系统设计课程设计说明书课程设计说明书成绩题目基于超声波传感器的测距系统设计课程名称检测技术及系统课程设计1.课程设计应达到的目的通过对本课程的设计,使学生掌握常见被测量的检测原理、方法和技术,了解国内外对这些工程量进行测控的系统组建原理,通过对检测系统的设计与分析,增强学生理解和运用所学知识来解决实际问题的能力,逐步掌握根据具体测控要求、性能指标设计出先进测控系统的方法和技术。
2.课程设计题目及要求题目:基于超声波传感器的测距系统设计要求:(1)测距范围:0~200mm,测距精度:±1mm;(2)根据题意,明确测距系统性能指标及系统能完成的功能;(3)根据系统要求,选择合适的传感器;(4)设计传感器测量电路;(5)选择单片机的品种、型号,设计单片机的外围测量电路;(6)计算有关的电路参数,有条件的情况下,根据实验室现有设备进行实验数据的测取,明确测量电路输出与被测非电量的关系;(7)画出系统原理框图(此部分放在说明书的开始);(8)画出系统电路图,最好用PROTEL画;(9)在说明书中详细说明本系统工作原理。
3.课程设计任务及工作量的要求〔包括课程设计计算说明书、图纸、实物样品等要求〕给出设计说明书一份;有条件的情况下尽量给出必要的实验数据;在说明书中附上完整的系统电路原理图(手画或用PROTEL画)。
4.主要参考文献李现明,吴皓编著.自动检测技术.北京:机械工业出版社,2009徐仁贵.单片微型计算机应用技术.北京:机械工业出版社.2001陈爱弟.Protel99实用培训教程.北京:人民邮电出版社.20005.课程设计进度安排起止日期工作内容13年6月3日布置设计任务,熟悉课题,查找资料;13年6月4日结合测控对象,选择合适的传感器,理解传感器性能;13年6月5日做实验,设计传感器测量电路,选择合适的单片机,设计其外围电路;13年6月6日设计电路参数,有条件情况下,在实验室进行实验,进一步理解测量电路输入输出关系;13年6月7日继续设计论证电路参数,完善系统设计方案;13年6月8日查找资料,理解系统各部分工作原理;13年6月9日理清系统说明要点,着手设计说明书的书写;13年6月13日书写设计说明书,充分理解系统每一部分作用;13年6月14日上午完善设计说明书,准备设计答辩。
《超声波测距仪电路设计》

《超声波测距仪电路设计》超声波测距仪电路设计超声波测距仪是一种常见的测距装置,它利用超声波的传播特性来测量目标物体与测距仪之间的距离。
其基本原理是利用超声波的发射和接收来计算目标物体与设备之间的距离。
超声波测距仪的电路设计包括发射电路和接收电路两部分。
1.发射电路设计超声波测距仪的发射电路主要包括发射器、脉冲发生电路和驱动电路。
发射器是将电能转换为声能的装置,一般采用压电陶瓷材料。
脉冲发生电路是用来产生发送的超声波脉冲信号的电路,常用的是555定时器芯片,通过设置合适的频率和占空比,可以实现超声波脉冲的产生。
驱动电路主要是将脉冲信号放大,并提供足够的电流和电压来驱动发射器。
2.接收电路设计超声波测距仪的接收电路主要包括接收器、放大电路和信号处理电路。
接收器是将接收到的声波信号转换为电信号的装置,常用的是压电陶瓷材料。
放大电路主要是将接收到的微弱信号放大到合适的电平,以便后续的信号处理。
信号处理电路包括滤波器和放大器,滤波器用于滤除杂散信号,放大器用于放大清晰的接收信号。
3.其他设计考虑除了发射电路和接收电路,还需要考虑一些其他设计因素。
第一,为了减小测量误差,需要加入合适的校准电路来对测量系统进行校准。
第二,为了方便使用,可以加入显示电路,将测量结果以数字或者模拟形式显示出来。
第三,为了提高抗干扰能力,可以加入滤波器和抗干扰电路来滤除干扰信号。
总之,超声波测距仪电路设计需要考虑发射电路、接收电路以及其他设计因素,合理配置各个部分的电路参数,并利用合适的元器件和电路拓扑结构,以提高测距仪的精度和稳定性。
在实际设计中,还需要考虑功耗、成本和尺寸等因素,以满足具体应用的要求。
基于STM32的超声波测距

基于STM32和US-100的超声波测距仪设计摘要:结合嵌入式处理器STM32F103与超声波传感器设计的一种简易的智能超声波测距仪装置,采用ARM内核芯片STM32F103ZET6的32位嵌入式微处理器与带有温度补偿的US-100超声波测距模块实现声波测距。
STM32的串口资源相当丰富,能提供5路串口,通过微处理器的串口实现实时显示和TFTLCD显示距离等参数。
US-100带有温度传感器,对超声波的声速进行补偿,提高测量精度。
关键词:STM32F103;US-100;超声波测距;TFTLCD显示Design of Ultrasonic Distance Measurement Based on STM32 And US-100 Abstract:Combined with the embedded microprocessor STM32F103 and ultrasonic sensor design a simple intelligent ultrasonic range finder devices, using ARM kernel chip STM32F103ZET632-bit embedded microcontroller processor with temperature compensation of US - 100 ultrasonic ranging module implements sound ranging.STM32 serial port resources rich in serial port can provide 5 road, through the serial port of the microprocessor to achieve real-time display and TFTLCD parameters such as - 100 with a temperature sensor, to compensate the velocity of ultrasonic wave, improve the accuracy of measurement. Keywords:STM32F103;US-100;Ultrasonic Distance Measurement;TFTLCD-Showing0引言超声波测距是一种典型的非接测量方式。
基于超声波的测距系统设计毕业设计
目录1前言 (1)1.1课题设计目的及意义 (1)1.1.1设计的目的 (1)1.1.2设计的意义 (1)1.2超声波测距技术的国内外现状 (1)1.2.1发展历史 (1)1.2.2研究现状 (2)1.3本课题研究的主要内容 (2)2总体方案设计 (4)2.1方案比较 (4)2.1.1方案一雷达测距系统 (4)2.1.2方案二激光测距系统的设计 (4)2.1.3方案三基于单片机的超声测距系统设计 (5)2.2方案论证 (7)2.3方案选择 (7)3单元模块设计 (8)3.1各单元模块功能介绍及电路设计 (8)3.1.1 单片机主机控制电路 (8)3.1.2 复位电路 (9)3.1.3 时钟电路 (10)3.1.4 按键电路 (10)3.1.5 蜂鸣器电路 (11)3.1.6 液晶显示电路 (11)3.1.7 温度采集DS18B20电路 (13)3.1.8 超声波发射电路设计 (14)3.1.9 超声波接收电路设计 (14)3.1.10 HR-SR04超声波集成模块 (15)3.1.11电源电路 (16)3.2 特殊器件的介绍 (17)3.2.1 超声波传感器 (17)3.2.2 1602字符型液晶显示器 (19)3.2.3 温度传感器DS18B20 (23)3.2.4 CX20106A芯片 (24)4软件设计 (26)4.1说明软件设计原理及设计所用工具 (26)4.2软件设计结构图 (27)4.3主要软件设计流程框图 (28)4.3.1程序流程框图及说明 (28)4.3.2 系统主程序 (29)4.3.3 40KHz超声波发送程序 (30)4.3.4 超声波的接受和处理程序 (30)4.3.5 DS18B20温度采集程序 (30)4.3.6 距离计算程序 (31)4.3.7 数据转换程序 (32)4.3.8 LCD显示程序 (32)5系统调试 (33)5.1软件调试 (33)5.2硬件调试 (35)6结论 (38)7总结与体会 (39)8谢辞 (40)9参考文献 (41)附录: (42)附录1:原理图 (42)附录2: (43)1前言1.1课题设计目的及意义1.1.1设计的目的随着科学技术越来越快的发展,超声波在测距系统中的应用将会越来越广泛。
超声波测距仪的设计方案

超声波测距仪的设计方案简介超声波测距仪是一种常见的测距设备,它利用超声波的传播特性来实现对距离的测量。
本文将介绍超声波测距仪的设计方案,包括硬件设计和软件设计。
硬件设计超声波传感器超声波传感器是超声波测距仪的核心部件,它能够发射超声波并接收回波。
常用的超声波传感器有两种,一种是单通道超声波传感器,一种是多通道超声波传感器。
控制电路超声波传感器和微控制器之间需要通过控制电路进行连接。
控制电路主要包括电压转换电路、信号放大电路和滤波电路,它们的作用是将超声波传感器输出的模拟信号转换为微控制器能够识别的数字信号。
显示装置为了方便用户查看测距结果,超声波测距仪通常会配备一个显示装置。
显示装置可以是液晶显示屏、数码管等,通过显示装置可以直观地显示测距结果。
电源模块超声波测距仪需要一个可靠的电源供电。
电源模块可以采用锂电池、干电池或者充电电池等供电方式。
软件设计初始化配置超声波测距仪启动时需要对各个模块进行初始化配置。
这包括设置超声波传感器的工作频率和增益,设置控制电路的参数,以及初始化显示装置等。
超声波测距算法超声波测距算法是超声波测距仪的核心算法,它主要用于计算超声波传感器发射的超声波到接收回波之间的时间差,从而得到距离。
常用的超声波测距算法有三角函数法、脉冲回波法和相位差法等。
其中,三角函数法是最简单的算法,适用于测量距离较短的情况;脉冲回波法和相位差法适用于测量距离较长的情况,但需要更为复杂的计算。
距离显示软件设计中还需要考虑如何将测得的距离值进行显示。
可以通过数码管、液晶显示屏或者计算机界面等方式进行显示。
报警功能超声波测距仪还可以增加报警功能,当检测到距离超过设定的阈值时,触发报警,提示用户该区域存在障碍物。
总结超声波测距仪的设计方案主要包括硬件设计和软件设计两部分。
硬件设计包括超声波传感器、控制电路、显示装置和电源模块的设计。
软件设计包括初始化配置、超声波测距算法、距离显示和报警功能等。
通过合理设计和优化算法,可以实现一个精准、稳定的超声波测距仪。
超声波测距仪的设计方案

超声波测距仪的设计方案一、引言超声波测距仪广泛应用于工业领域中的距离测量需求。
本文将介绍一种超声波测距仪的设计方案,以满足高精度、稳定性和可靠性的要求。
二、设计原理超声波测距仪的设计基于超声波测距原理,即通过发送超声波信号到目标物体,并测量回波信号的时间差来计算距离。
具体设计方案如下。
1. 发射装置为保证发射的超声波信号稳定且具有较高的频率精度,我们选用一种高品质的压电陶瓷振荡器作为发射装置。
该振荡器能够提供稳定的超声波信号,并具有快速响应和较低的失真率。
2. 接收装置为捕获和处理回波信号,我们采用一个高灵敏度的超声波接收器。
该接收器能够有效接收和放大回波信号,并通过滤波和放大电路将其转化为数字信号。
3. 信号处理为了准确计算距离,我们使用微处理器进行信号处理。
微处理器通过测量发射与接收之间的时间差,并根据声速来计算出距离。
三、主要模块设计为确保超声波测距仪的可靠性和性能,我们将其设计分为以下几个主要模块。
1. 信号发射模块该模块由压电陶瓷振荡器和驱动电路组成。
振荡器负责产生高频稳定的超声波信号,驱动电路用于提供所需的电源和信号放大。
2. 信号接收模块该模块包括超声波接收器、放大电路和滤波电路。
超声波接收器接收回波信号,并将其放大后传递给滤波电路,以去除噪声和杂散信号。
3. 信号处理模块该模块由微处理器和相关电路组成。
微处理器负责计算距离,并将结果显示在相关显示装置上。
四、性能优化与安全保障为提高超声波测距仪的性能并确保使用过程中的安全可靠,我们采取以下措施。
1. 信号干扰处理在设计中加入了信号滤波电路和抗干扰电路,以防止外界干扰对测距精度的影响。
2. 电源管理采用高质量的电源管理模块,以确保供电稳定并防止电源的波动对测距仪的正常工作产生影响。
3. 结构设计在外壳设计中考虑到机械强度和防水性能,以保证超声波测距仪在各种环境下的可靠性和耐用性。
五、应用场景超声波测距仪的设计方案可以广泛应用于以下情景:1. 无人驾驶超声波测距仪可用于无人驾驶汽车中的障碍物检测和距离测量,以确保行驶安全。
超声波测距仪的设计

超声波测距仪的设计
超声波测距仪的设计一般包含超声发射器、接收器、计时
电路和显示电路。
下面将对其各组成部分进行具体说明。
1. 超声发射器:
超声发射器是超声波测距仪的关键组件,通常由压电陶瓷
传感器构成。
它能将电能转化为超声波能量。
通过施加电压,压电陶瓷会振动产生超声波,并向周围环境发射。
2. 接收器:
接收器是超声波测距仪的另一个重要组成部分。
它通常也
由压电陶瓷传感器构成。
当超声波波达到测距仪的目标物
体后,一部分超声波会被目标物体反射回来,被接收器接收。
接收器会将接收到的超声波转化为电信号。
3. 计时电路:
计时电路用于测量从超声发射到接收到反射信号之间的时
间间隔,根据声速和时间间隔可以计算出目标物体的距离。
计时电路通常由逻辑门、计数器、时钟等组成。
4. 显示电路:
显示电路用于显示目标物体的距离。
一般可以通过数码显
示器或者液晶显示屏将测得的距离进行显示。
显示电路通
常由数码显示器、驱动电路、控制电路等组成。
除了以上组成部分,还可以加入一些其他功能,例如校准
电路、报警电路等,以提高测距仪的精度和实用性。
设计
超声波测距仪需要对各个组成部分进行合理的配置和调试,使得整个测距仪可以稳定、准确地测量目标物体的距离。
基于US—100超声波测距仪设计
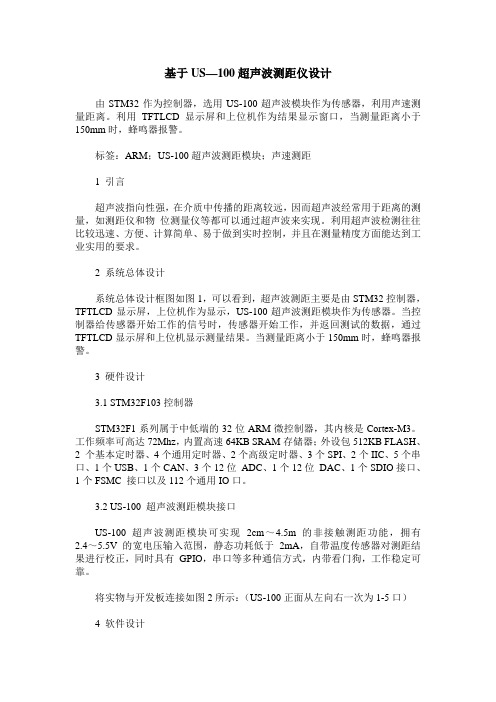
基于US—100超声波测距仪设计由STM32作为控制器,选用US-100超声波模块作为传感器,利用声速测量距离。
利用TFTLCD显示屏和上位机作为结果显示窗口,当测量距离小于150mm时,蜂鸣器报警。
标签:ARM;US-100超声波测距模块;声速测距1 引言超声波指向性强,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
2 系统总体设计系统总体设计框图如图1,可以看到,超声波测距主要是由STM32控制器,TFTLCD显示屏,上位机作为显示,US-100超声波测距模块作为传感器。
当控制器给传感器开始工作的信号时,传感器开始工作,并返回测试的数据,通过TFTLCD显示屏和上位机显示测量结果。
当测量距离小于150mm时,蜂鸣器报警。
3 硬件设计3.1 STM32F103控制器STM32F1系列属于中低端的32位ARM微控制器,其内核是Cortex-M3。
工作频率可高达72Mhz,内置高速64KB SRAM存储器;外设包512KB FLASH、2 个基本定时器、4个通用定时器、2个高级定时器、3个SPI、2个IIC、5个串口、1个USB、1个CAN、3个12位ADC、1个12位DAC、1个SDIO接口、1个FSMC 接口以及112个通用IO口。
3.2 US-100 超声波测距模块接口US-100 超声波测距模块可实现2cm~4.5m 的非接触测距功能,拥有2.4~5.5V 的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
将实物与开发板连接如图2所示:(US-100正面从左向右一次为1-5口)4 软件设计4.1 总体软件设计测距的过程可以分为三个部分,分别为:控制器资源配置、US-100 的时序模拟测量过程及数据处理、显示及判断测量距离是否小于150mm。
US100超声波测距模块解析.doc
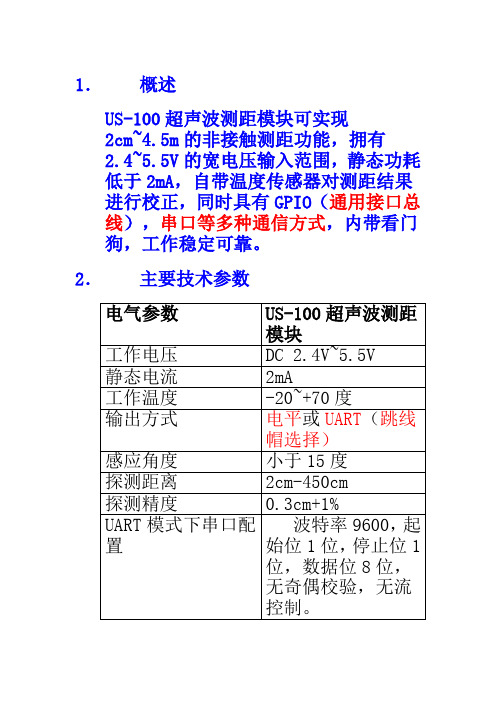
1.概述US-100超声波测距模块可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO(通用接口总线),串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数3.本模块实物图及尺寸本模块如图3.1和图3.2所示:图3.1:US-100正面图本模块的尺寸:45mm*20mm*1.6mm。
板上有两个半径为1mm的机械孔,如图3.3所示:图3.3:US-100尺寸图4.接口说明本模块共有两个接口,即模式选择跳线和5 Pin接口。
模式选择跳线接口如图4.1所示。
模式选择跳线的间距为2.54mm,当插上跳线帽时为UART(串口)模式,拔掉时为电平触发模式。
图4.1:模式选择跳线接口5 Pin接口为2.54mm间距的弯排针,如图4.2所示:图4.2:5 Pin接口从左到右依次编号1,2,3,4,5。
它们的定义如下:1号Pin:接VCC电源(供电范围2.4V~5.5V)。
2号Pin:当为UART模式时,接外部电路UART的TX端;当为电平触发模式时,接外部电路的Trig端。
3号Pin:当为UART模式时,接外部电路UART的RX端;当为电平触发模式时,接外部电路的Echo端。
4号Pin:接外部电路的地。
5号Pin:接外部电路的地。
5.电平触发测距工作原理在模块上电前,首先去掉模式选择跳线上的跳线帽,使模块处于电平触发模式。
电平触发测距的时序如图5.1所示:图5.1:US-100测距时序图图5.1表明:只需要在Trig/TX管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX管脚输出。
在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过Echo端输出一高电平,可根据此高电平的持续时间来计算距离值。
基于超声波技术的非接触测距装置完成稿
基于超声波技术的非接触测距装置大连工业大学集成测控技术研究所李锦涛为了解决现有的接触式测距装置的不便,特发明了一款基于超声波技术的非接触测距装置。
本装置设计的目的就是对距离实现非接触的测量,从而应用于一些不适合接触测量的场合,并且可以实现对距离的动态测量和实时测量,减轻人工劳动,可用于距离测量,距离报警等方面。
而当今市场上主要还是接触式测量工具,但是非接触式测量工具具有明显优势,本装置应运而生。
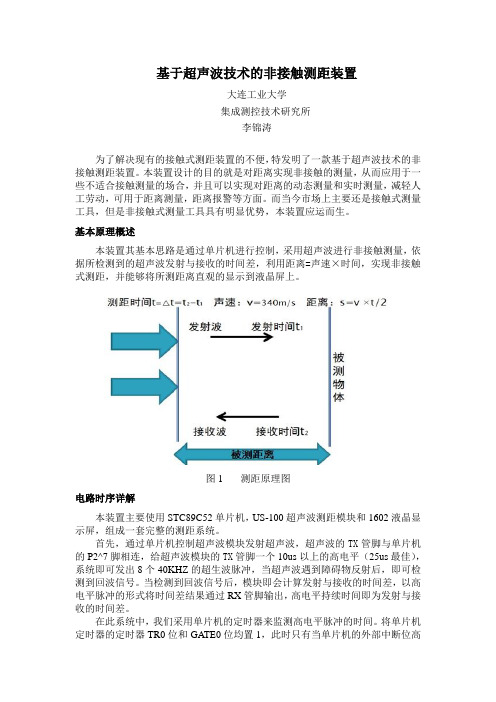
基本原理概述本装置其基本思路是通过单片机进行控制,采用超声波进行非接触测量,依据所检测到的超声波发射与接收的时间差,利用距离=声速×时间,实现非接触式测距,并能够将所测距离直观的显示到液晶屏上。
图1测距原理图电路时序详解本装置主要使用STC89C52单片机,US-100超声波测距模块和1602液晶显示屏,组成一套完整的测距系统。
首先,通过单片机控制超声波模块发射超声波,超声波的TX管脚与单片机的P2^7脚相连,给超声波模块的TX管脚一个10us以上的高电平(25us最佳),系统即可发出8个40KHZ的超生波脉冲,当超声波遇到障碍物反射后,即可检测到回波信号。
当检测到回波信号后,模块即会计算发射与接收的时间差,以高电平脉冲的形式将时间差结果通过RX管脚输出,高电平持续时间即为发射与接收的时间差。
在此系统中,我们采用单片机的定时器来监测高电平脉冲的时间。
将单片机定时器的定时器TR0位和GATE0位均置1,此时只有当单片机的外部中断位高电平时定时器才会开启。
将超声波的RX管脚与单片机的外部中断(INT0)管脚相连,这样,当监测到回波信号时,定时器自动开启,当回波脉冲结束时,定时器自动关闭,这样既可以提高精确度,又可以有效防止因未检测到回波而引起的死机问题。
之后,利用公式S=V*T/2(因为经过反射,所以时间需要除以2),即可计算出所测量的距离。
然后用单片机驱动1602液晶显示模块,将距离显示到液晶上,这样,人就可以通过液晶显示屏读出所测距离。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
147
电子技术
图 1 系统总体设计框图
图2 US-100与开发板引脚连接关系图
1 引言
超声波指向性强,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物 位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。
2 系统总体设计
基于US-100超声波测距仪设计
喻文倩
(西南科技大学,四川 绵阳 621010)
摘 要:由STM32作为控制器,选用US-100超声波模块作为传感器,利用声速测量距离。
利用TFTLCD 显示屏和上位机作为结果显示窗口,当测量距离小于150mm 时,蜂鸣器报警。
关键词:ARM;US-100超声波测距模块;声速测距
测距的过程可以分为三个部分,分别为:控制器资源配置、 US-100 的时序模拟测量过程及数据处理、显示及判断测量距离是否小于150mm。
4.1.1 控制器的资源配置
#ifndef __TIMER_H #de fi ne __TIMER_H #include "sys.h"
void GPIOA1_Init(void); void GPIOA3_Init(void);
void TIM3_Int_Init(u16 arr,u16 psc); void TIM3_PWM_Init(u16 arr,u16 psc);
void TIM5_Cap_Init(u16 arr,u16 psc); void TIM4_Cap_Init(u16 arr,u16 psc);#endif
定时器5通道1输入捕获配置: void GPIOA1_Init(void) 初始化定时器5 TIM5:
void TIM5_Cap_Init(u16 arr,u16 psc) 中断分组初始化:
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //TIM3中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct 中指定的参数初始化外设
TIM_ITCon fi g(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//,允许CC1IE 捕获中断TIM_Cmd(TIM5,ENABLE );
//使能定时器5 定时器5中断服务程序:void TIM5_IRQHandler(void)
(下转第194页)
系统总体设计框图如图1,可以看到,超声波测距主要是由STM32控制器,TFTLCD 显示屏,上位机作为显示,US-100超声波测距模块作为传感器。
当控制器给传感器开始工作的信号时,传感器开始工作,并返回测试的数据,通过TFTLCD 显示屏和上位机显示测量结果。
当测量距离小于150mm 时,蜂鸣器报警。
3 硬件设计
3.1 STM32F103控制器
STM32F1系列属于中低端的32位ARM 微控制器,其内核是Cortex-M3。
工作频率可高达72Mhz,内置高速64KB SRAM 存储器;外设包512KB FLASH、2 个基本定时器、4个通用定时器、2个高级定时器、3个SPI、2个IIC、5个串口、1个USB、1个CAN、3个12位 ADC、1个12位 DAC、1个SDIO 接口、1个FSMC 接口以及112个通用IO 口。
3.2 US-100 超声波测距模块接口
US-100 超声波测距模块可实现 2cm~4.5m 的非接触测距功能,拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温度传感器对测距结果进行校正,同时具有 GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
将实物与开发板连接如图2所示:(US-100正面从左向右一次为1-5口)
4 软件设计
4.1 总体软件设计
194
电力技术
(3)本文是在模拟仿真的情况下得出的结果,在实际运行和操作中,还必须要考虑一定的经济成本和政策要求,因此,我们的防雷保护还需要在未来做进一步的改善。
参考文献:
[1] 王南兰.变电所和发电厂的防雷保护[J].邵阳高等专科学校学报,2001,14(01):19-21.
[2] 李琥,项玲.运用ATPDraw 仿真分析变电所接地网雷电暂态效应[J].江苏机电工程,2005,24(03):44-45.
[3] 高爱云.ATPDraw 及其在输电线操作过电压中的应用研究[J].广东水利电力职业技术学院学报,2005,3(02):49-51. [4] 赵玉林.高电压技术[M].北京:中国电力出版社,2008.[5] 林福昌.高电压工程(第二版)[M].北京:中国电力出版社,2011.[6] 赵智大.高电压技术(第三版)[M] .北京:中国电力出版社,2013.
[7] 亓超.基于ATP-Draw 的220kV 户外变电站雷电侵入波计算分析[D].山东:山东大学,2013.
[8] 李庆玲,程济兵,王晓燕,梁志钰.输电线路氧化锌避雷器应用研究[J].高压电器,2010,46(04):77-80.
[9] 秦家远.雷击下金属氧化物避雷器ATP 仿真模型分析[J].电瓷避雷器,2007(06):41-44.
[10] 尧广,曾明贵,李盛涛,李利红,李学忠.35kv 电磁式电压互感器连续爆炸事故探讨[J].高压电器,2012,48(10):114-119.[11] 熊信银,朱永利,律方成,李永刚,刘继春.发电厂电气部分(第四版)[M].北京:中国电力出版社,2009.
[12] 肖军,董芳华,盛佳,欧阳友.中压系统电磁式电压互感器选择研究[J] .人民长江,2012,43(21):82-84.
作者简介:杨大川(1994-),男,山东济宁人,青海大学,本科,电
气工程及其自动化。
图3 US-100测距时序图
(上接第147页)
在主程序中调用定时器:TIM5_Cap_Init(0XFFFF,72-1);//以1Mhz 的频率计数
4.1.2 US-100 的时序模拟测量过程
由TRIG_Send 发送高电平,延时20us:GPIO_SetBits(GPIOA,GPIO_Pin_1); delay_us(20);
GPIO_ResetBits(GPIOA,GPIO_Pin_1);
根据时间,距离计算公式为 distance=times*10e-4*340/2*10e3=times*34/2,
{ temp=TIM5CH1_CAPTURE_STA&0X3F; temp*=65536;//溢出时间总和
temp+=TIM5CH1_CAPTURE_VAL;//得到总的高电平时间
TIM5CH1_CAPTURE_STA=0;//开启下一次捕
获
distance=temp*0.17; }
4.1.3 显示测量结果,并判断数据是否小于150mm
LCD_ShowNum(140,50,distance,4,16); delay_ms(2000); i++;
if(distance<=150)
{ BEEP=1;
}//如果距离小于150蜂鸣
器报警 if(distance>150)
{ BEEP=0;}//如果距离大于150蜂鸣器关
闭 if(i%20==0)
{ printf("Distance:%d cm\r\n",distance); }
5 总结
本文重点叙述了如何使用US100制作超声波测距仪。
利用STM32设计软件,通过硬件US100实现。
从设计过程可以看出该仪器原理简单、制作方便、成本低。
但是当要测量距离较远的目标时,由于外界环境的干扰,一方面声波发散而使能量降低,另一方面使分辨力下降,从而使得准确度下降,造成测量数据不准确。
所以该
设计一般用于近距离的测量。
参考文献:
[1]刘林茂.一种特殊构件粘接缺陷的超声波检测[J].无损检测,2010(01). [2]邓大勇.钢板超声波检测基准灵敏度确定的诠释[J].青海电力,2008(02).[3]刘金平,胡斌定.大型钢桥箱型梁超声波检测[J].无损探伤,2009(06).作者简介:喻文倩(1994—),女,四川成都人,本科,研究方向:电气工程及其
自动化。