综合试验船模电伺服控制系统设计
船舶工业中的船舶自动控制系统设计
船舶工业中的船舶自动控制系统设计船舶工业一直以来都在不断发展和创新,为了提高船舶的安全性、性能和效率,船舶自动控制系统应运而生。
船舶自动控制系统是指通过自动化技术,对船舶的各种操作和控制进行自动化处理,实现船舶的自主航行、动力分配以及船舶性能的智能化控制。
本文将探讨船舶自动控制系统的设计原理、关键技术以及未来发展趋势。
一、船舶自动控制系统设计的原理船舶自动控制系统的设计原理基于以下三个方面:1. 传感和采集:船舶自动控制系统通过传感器和采集设备,对船舶的各项参数和状态进行实时监测和采集。
这些参数包括船舶的位置、速度、航向、倾斜角度、动力系统状态等。
传感器将采集到的数据传输给控制中心进行处理。
2. 分析和处理:控制中心负责对传感器采集到的数据进行分析和处理。
通过对数据进行实时分析和算法处理,控制中心能够判断船舶的当前状态,并制定相应的控制策略。
例如,当船舶接近雷区时,控制中心会自动触发报警系统,并调整船舶航行道路,确保船舶的安全。
3. 控制和执行:一旦分析和处理完毕,控制中心会向船舶各个控制装置发送指令,实现对船舶的自动控制。
这些指令可以是引擎启停、舵角调整、动力分配等。
船舶自动控制系统需要与船舶的动力系统、舵机系统等各个关键装置进行紧密的连接和协同工作。
二、船舶自动控制系统设计的关键技术1. 数据通信技术:船舶自动控制系统中的传感器、控制装置和控制中心需要进行信息的传输和交换。
因此,数据通信技术是实现信息共享和协同控制的关键。
目前,船舶工业中普遍采用的是CAN总线、以太网、无线通信等技术来建立数据通信的网络。
2. 数据处理与算法技术:船舶自动控制系统需要对大量的数据进行处理和分析,以实现对船舶状态的判断和控制策略的制定。
数据处理与算法技术的应用对提高船舶自动控制系统的性能至关重要。
例如,通过图像处理技术对船舶周围的环境进行识别,实现自动避碰等功能。
3. 人机界面技术:船舶自动控制系统的设计需要满足人机交互的需求,使操作人员能够方便地操作和监控系统。
多智能体环境下的船舶机电系统控制系统设计
多智能体环境下的船舶机电系统控制系统设计船舶机电系统控制系统的设计是船舶智能化发展的关键,是将多智能体系统应用于船舶机电系统的核心部分。
多智能体环境下的船舶机电系统控制系统设计主要涉及到以下几个方面。
设计一个适合多智能体环境的船舶机电系统控制系统架构。
船舶机电系统包括发动机、电力系统、船舶辅助设备等多个子系统,每个子系统都有自己的控制要求和特点。
在多智能体环境下,需要将各个子系统的控制单元(智能体)进行连接和交互,构建一个整体的控制系统架构。
这样能够实现各个子系统之间的信息传递和协同操作,提高整个船舶机电系统的性能和效率。
设计多智能体之间的通信和协作机制。
在多智能体环境下,各个智能体需要相互通信和协作,共同完成船舶机电系统的控制任务。
需要设计一套可靠高效的通信和协作机制,使得各个智能体之间能够交换信息、共享资源,并且能够根据船舶运行的需求实现协同工作。
设计智能体的决策和控制算法。
多智能体环境下的船舶机电系统控制系统需要由多个智能体共同完成任务,因此需要设计智能体的决策和控制算法。
这些算法应考虑到各个子系统的控制要求和特点,以及船舶机电系统的整体性能。
还需要考虑到智能体之间的协作关系和优化目标,使得整个系统的性能得以最大化。
需要考虑到船舶机电系统控制系统的可扩展性和适应性。
船舶机电系统会随着船舶的不同任务和工况而发生变化,设计的控制系统需要能够满足不同任务和工况的需求。
还需要考虑到未来船舶智能化发展的趋势和需求,设计一个具有可扩展性和适应性的控制系统,以便于将来的系统升级和扩展。
船舶电站综合控制系统的设计
船舶电站综合控制系统的设计何幼富;郑少霓【摘要】This paper aimed at the research on integrated control system of ship power station was carried out, the design of automatic system proposed power plant control close combination of ship power system, simulation of ship power system, using distributed architecture, composed of a computer and three generator group subsystem units. Each power subsystem consists of a set of PLC control module, through the touch screen to control the realization of automatic control, can not only realize two generators and automatic synchronization, frequency and load control, car stop solution column and other functions, can realize the functions through the manual automatic protection of marine power supply system increase the load way.%针对船舶电站综合控制系统进行了研究,提出电站自动控制系统设计要紧密结合船舶供电系统,模拟船电系统,采用分布式结构,由1台工控机和3个发电机组子系统单元组成。
多智能体环境下的船舶机电系统控制系统设计
多智能体环境下的船舶机电系统控制系统设计随着船舶技术的不断发展,船舶机电系统的控制系统设计也日益成为一个重要的研究领域。
在传统的船舶机电系统中,通常采用单一的中央控制系统,但随着船舶规模的不断扩大和机电系统的复杂性增加,单一控制系统难以满足船舶机电系统的控制需求。
设计一种多智能体环境下的船舶机电系统控制系统成为了一个迫切的需求。
在船舶机电系统中,涉及到的控制对象多样化,包括发动机、发电机、舵机、泵等多种设备,而这些设备的控制之间又存在一定的依赖关系。
在传统的单一控制系统中,这些设备的控制需求难以有效的协调和调度,而多智能体环境下的控制系统则可以有效地解决这一问题。
多智能体系统是一种由多个智能体协同工作的系统,每个智能体都具有一定的独立性和自主性,能够根据自身的信息和环境的变化做出相应的决策和行动。
在船舶机电系统中,各个设备可以看作是一个个智能体,它们通过网络进行通信和协作,实现整个船舶机电系统的协调运行。
在设计多智能体环境下的船舶机电系统控制系统时,需要考虑如何有效地组织各个智能体之间的通信和协作。
需要确定每个智能体的功能和任务分配,包括传感器信息的采集、控制执行器的控制和决策制定等。
需要设计一种合理的通信机制,保障各个智能体之间能够及时地交换信息和协作。
需要设计一种合适的决策机制,实现各个智能体之间的协调运行。
在实际的船舶机电系统中,由于设备之间的依赖性和复杂性,多智能体系统的设计需要考虑到多种不确定性因素,因此需要采用一种能够适应不确定性环境的决策机制,比如基于模糊逻辑或者强化学习的决策方法。
除了设计多智能体之间的协作机制外,还需要考虑多智能体系统与船舶机电系统的整体融合。
船舶机电系统通常具有很强的实时性和高可靠性的要求,因此多智能体系统的设计需要考虑到这些要求,保障系统能够在复杂的海洋环境中稳定运行。
船舶机电系统通常具有高度的灵活性和可扩展性,因此多智能体系统的设计也需要考虑到系统的灵活性和可扩展性,保障系统能够适应不同规模和不同类型的船舶机电系统。
船舶自动化控制系统的设计与实现

船舶自动化控制系统的设计与实现船舶自动化控制系统是一种关键性的工程,涉及到船舶的自动化控制、电力、热力、燃油等系统。
本文所述的船舶自动化控制系统主要是指船舶的宏控系统。
一、船舶自动化控制系统的系统架构船舶自动化控制系统的系统架构从宏观上分为三个部分:船舶自动化仪表、控制器和控制设备。
其中,船舶自动化仪表负责接收和显示信息;控制器和控制设备负责收集、分析、维护和控制相应的信息。
二、船舶自动化控制系统的集成框架船舶自动化控制系统的集成框架是指整个系统由几个子系统组成。
船舶自动化控制系统主要由两个子系统组成:船舶自动控制系统和船舶自动设备监控和诊断系统。
船舶自动控制系统主要是船舶的传感器系统、控制处理机和推进机组控制系统。
传感器系统负责收集船尾和尾部的信息,控制处理机负责对采集到的信息进行处理和分析,推进机组控制系统则负责控制船舶的推进器。
船舶自动设备监控和诊断系统主要由船舶进出口信息采集系统、CCS(集控中心系统)和设备监控及诊断系统三部分组成。
将采集到的信息提供给CCS进行统一管理,同时可以通过设备监控及诊断系统来对船舶的设备进行监控和故障诊断。
三、船舶自动化控制系统的集成实现船舶自动化控制系统的集成实现需要在软件层面和硬件层面进行。
从硬件层面分为两个部分:船舶自动化控制系统的硬件和船舶自动化设备硬件。
从软件层面分为:船舶自动化控制系统软件和船舶自动化设备软件两个部分。
船舶自动化控制系统的硬件主要是指CCS系统的硬件,包括服务器、交换机、网桥、工控机等;自动设备硬件则是指设备硬件,包括传感器等。
船舶自动化控制系统的软件则是指基于CCS的操作系统,包括VB、Java、C++等。
设备软件包括全自动设备管理软件、自动诊断软件等。
四、船舶自动化控制系统的集成应用船舶自动化控制系统的集成应用主要是指船舶的实时信息反馈,并能根据信息进行设备的调整和处理。
同时还能对设备进行故障检测和诊断,以便及时维修和保养设备。
船舶综合模拟器控制系统的设计研究

成 。硬 件 结 构 设 计 如 图 2 示 ,操 所
纵 台面 板 的 操 舵 装 置 ( 动 舵 、应 随
急 舵 )、 车 钟 、 罗 经 、 声 号 (鸣 笛 、 应 答 ) 靠 离 码 头 部 署 、 舵 、 角 指 示 器 、视 景 控 制 等 部 件 采 用
2、 模 拟 船 的 硬 件 设 计
2 1船 舶 操 纵 模 拟 器 的 硬 件 设 计 .
船 舶操 纵 模 拟 器 用于 操纵 本 船 和 显 示 环 境 信 息 。 主 要 由 操 纵 台 控 制 机 、 操 纵 面 板 、 中央 控 制 电 路 模 块 、 采 集 模 块 和 显 示 设 备 组
一
公约 》 ,提 高 船 员 的 基 本 素 质 和
专 业 技 能 ,保 障 水 上 人 命 和 财 产
于 一 体 的 多 本 船 船 舶 综 合 模 拟 器
( 1 越 来 越 受 到 学 员 的欢 迎 。 船 图 ) 舶综 合 模 拟器 由硬 件 部 分 和软 件 部
的 安 全 ,保 护 海 洋 环 境 ; 同 时 ,
演 练 , 物 理 真 实 感 、行 为真 实 感 其 和 操 船 环 境 真 实 感 还 有 较 大 的 发
展 空 间。随 着 电子 技 术 、信息 技 术
检 测 的 结 果 传 送 给 计 算 机 , 通 过
模 拟 软 件 来 变 换 操 船 的 场 景 , 同
时 ,将 当 前 的 舵 转 过 的 角 度 、 主 机 转 速 、 起 动 气 压 等 传 送 给 控 制
图 2船 舶 操 纵 模 拟 器 硬 件 结 构 图
像 与 电 子海 图 实 时 匹配 算 法 , 雷 将 达 图像 和 电 子海 图有机 地 结 合 在 一
《2024年电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言在海洋工程与船舶动力领域,电液伺服并联六自由度船舶模拟器(简称六自由度模拟器)因其精确的动态模拟能力和高效的操控系统在实验研究和性能测试中占有重要地位。
随着海洋技术不断发展,对于船舶动力性能及航行环境的要求也越来越高,这就要求我们针对船舶模拟器的控制技术进行深入的研究和探索。
本文将对电液伺服并联六自由度船舶模拟器的控制原理、技术特点和实验分析进行深入的研究,为实际使用和未来发展提供理论基础和实践经验。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种基于电液伺服系统和并联机构原理的船舶动态模拟设备。
其通过模拟船舶在航行过程中所受到的多种外力(如风、浪、流等)以及船舶自身的运动状态(如横摇、纵摇、垂荡等),实现对船舶动态特性的精确模拟。
该系统主要由电液伺服系统、并联机构、传感器和控制单元等部分组成。
三、控制原理与技术特点电液伺服并联六自由度船舶模拟器的控制原理主要依赖于先进的电液伺服系统和精确的传感器技术。
控制系统通过实时获取传感器数据,对船舶的动态特性进行实时分析和计算,然后通过控制单元对电液伺服系统发出指令,实现对船舶运动状态的精确控制。
该系统的技术特点主要体现在以下几个方面:1. 高精度:电液伺服系统具有高精度和高响应速度的特点,能够实现对船舶动态特性的精确模拟。
2. 高效性:并联机构的设计使得系统具有较高的运动效率和稳定性,能够快速响应各种复杂的运动状态。
3. 实时性:传感器和控制单元的实时性保证了系统能够实时获取和分析船舶的动态特性,为精确控制提供了有力保障。
四、实验分析为了验证电液伺服并联六自由度船舶模拟器的控制效果,我们进行了大量的实验分析。
实验结果表明,该系统能够精确地模拟船舶在航行过程中所受到的各种外力和自身的运动状态,具有良好的稳定性和精度。
同时,通过对系统进行性能测试和故障诊断,我们验证了该系统在多种环境条件下的适应性和可靠性。
《电液伺服并联六自由度船舶模拟器控制研究》范文

《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言在海洋工程与船舶动力领域,电液伺服并联六自由度船舶模拟器已经成为研究和验证新型船舶系统控制策略的重要工具。
随着现代科技的发展,船舶模拟器的精确性和可靠性对提高船舶航行性能、安全性以及环境适应性至关重要。
本文将针对电液伺服并联六自由度船舶模拟器的控制技术进行深入研究,探讨其关键技术和挑战。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种用于模拟船舶在各种环境条件下的运动和响应的装置。
它具有六个自由度,可以模拟船舶在空间中的六个方向上的运动,包括前后、左右、垂直三个方向的平移以及旋转等。
电液伺服系统作为模拟器的核心,其性能直接影响到模拟器的精确性和可靠性。
三、电液伺服系统的工作原理与特点电液伺服系统是一种以液压传动为基础的控制系统,通过电子控制系统和液压执行元件的协同作用,实现对目标运动的精确控制。
其工作原理是利用电子控制系统对液压执行元件进行精确控制,使液压执行元件的输出力或位移与输入的指令信号相对应,从而实现对目标的精确控制。
电液伺服系统具有响应速度快、力矩大、定位精度高等优点,在船舶模拟器中具有重要应用价值。
同时,它还可以实现复杂运动的模拟,如波浪中的船舶运动等。
四、电液伺服并联六自由度船舶模拟器的控制策略针对电液伺服并联六自由度船舶模拟器的控制,本文提出了一种基于模糊控制的控制策略。
该策略通过引入模糊逻辑算法,实现对系统的不确定性进行精确补偿,提高系统的鲁棒性。
同时,通过优化控制算法的参数,提高系统的响应速度和定位精度。
此外,本文还探讨了其他控制策略的应用,如神经网络控制、自适应控制等。
这些控制策略可以进一步提高系统的精确性和可靠性,为船舶模拟器的应用提供更多可能性。
五、实验结果与分析为了验证本文提出的控制策略的有效性,我们进行了一系列实验。
实验结果表明,采用模糊控制的电液伺服并联六自由度船舶模拟器具有较高的精确性和可靠性,能够实现对船舶运动的精确模拟。
《电液伺服并联六自由度船舶模拟器控制研究》范文

《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着现代船舶技术的不断发展,船舶模拟器在船舶设计、训练和测试中扮演着越来越重要的角色。
电液伺服并联六自由度船舶模拟器作为一种高精度、高动态性能的模拟设备,其控制系统的研究对于提高模拟器的性能和可靠性具有重要意义。
本文将针对电液伺服并联六自由度船舶模拟器的控制系统进行研究,探讨其控制策略和实现方法。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种用于模拟船舶在海洋中运动状态的设备。
它具有六个自由度,即沿X、Y、Z轴的平动和绕X、Y、Z轴的转动。
该模拟器通过电液伺服系统实现高精度、高动态性能的运动控制,能够模拟出船舶在各种海况下的运动状态。
三、控制系统设计电液伺服并联六自由度船舶模拟器的控制系统是模拟器的核心部分,其设计直接影响到模拟器的性能和可靠性。
控制系统主要包括控制器、传感器、执行器等部分。
首先,控制器是控制系统的核心,它根据模拟器的运动指令和传感器反馈的信息,计算出控制信号,驱动执行器进行运动控制。
控制器的设计需要考虑到系统的稳定性、动态性能、抗干扰能力等因素。
其次,传感器是控制系统的重要组成部分,它能够实时监测模拟器的运动状态和环境变化,并将信息反馈给控制器。
传感器的精度和可靠性直接影响到控制系统的性能。
最后,执行器是控制系统的输出部分,它根据控制器的指令进行运动控制。
在电液伺服并联六自由度船舶模拟器中,执行器通常采用液压缸或电机等设备。
四、控制策略研究电液伺服并联六自由度船舶模拟器的控制策略是控制系统的关键部分,它直接影响到模拟器的运动性能和精度。
常用的控制策略包括PID控制、模糊控制、神经网络控制等。
PID控制是一种经典的控制策略,它根据误差信号进行比例、积分和微分运算,计算出控制信号。
在电液伺服并联六自由度船舶模拟器中,PID控制能够实现对系统的高精度控制,但需要考虑到系统的非线性和时变性等因素。
模糊控制是一种基于模糊逻辑的控制策略,它能够处理不确定性和非线性问题。
《电液伺服并联六自由度船舶模拟器控制研究》
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着现代船舶技术的不断发展,船舶模拟器在船舶设计、训练和测试中扮演着越来越重要的角色。
电液伺服并联六自由度船舶模拟器作为其中一种先进的模拟设备,以其高精度、高稳定性和高动态响应性能受到了广泛的关注。
本文将重点研究电液伺服并联六自由度船舶模拟器的控制技术,以提高其性能和控制精度。
二、电液伺服并联六自由度船舶模拟器的工作原理与组成电液伺服并联六自由度船舶模拟器是一种以电液伺服系统为执行元件,模拟船舶六自由度运动状态的设备。
它主要由六个伺服驱动单元、控制系统、传感器等组成。
其中,每个伺服驱动单元都采用电液伺服系统,通过控制液压缸的伸缩来实现船舶的六个自由度运动。
三、控制技术研究1. 控制器设计电液伺服并联六自由度船舶模拟器的控制器设计是整个系统的核心。
为了实现高精度、高稳定性的控制,本文采用先进的数字控制器,结合模糊控制、神经网络等智能控制算法,对每个伺服驱动单元进行独立控制。
通过优化控制器参数,提高系统的动态响应性能和鲁棒性。
2. 信号处理与反馈控制在电液伺服并联六自由度船舶模拟器中,信号处理与反馈控制是保证系统性能的关键。
通过高精度的传感器实时采集船舶的运动状态信息,经过信号处理后反馈给控制器。
控制器根据反馈信息对系统进行实时调整,以实现精确的控制。
同时,采用先进的滤波算法,消除噪声干扰,提高信号的信噪比。
3. 并联控制策略电液伺服并联六自由度船舶模拟器的六个伺服驱动单元需要协同工作,以实现船舶的六个自由度运动。
因此,本文研究了一种并联控制策略,通过优化各伺服驱动单元的协调性,提高系统的整体性能。
该策略采用分层控制结构,将系统分为上层控制器和下层执行器两部分。
上层控制器负责制定运动轨迹和分配任务给下层执行器;下层执行器则根据上层控制器的指令,通过电液伺服系统实现精确的运动控制。
四、实验与结果分析为了验证电液伺服并联六自由度船舶模拟器控制技术的有效性,本文进行了大量的实验。
《电液伺服并联六自由度船舶模拟器控制研究》
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着现代船舶技术的不断发展,船舶模拟器在船舶设计、测试和训练中扮演着越来越重要的角色。
其中,电液伺服并联六自由度船舶模拟器作为一种高性能的模拟设备,能够为船员提供更为真实的航海环境体验。
因此,对电液伺服并联六自由度船舶模拟器的控制研究具有重要意义。
本文旨在探讨电液伺服并联六自由度船舶模拟器的控制策略和控制算法,以提高其控制精度和稳定性。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种基于电液伺服系统的六自由度运动模拟设备。
它通过六个独立的液压驱动系统实现船舶的六个自由度运动,包括沿X、Y、Z轴的平动和绕X、Y、Z轴的转动。
这种模拟器具有高精度、高动态性能和高稳定性等特点,可广泛应用于船舶设计、测试和训练等领域。
三、控制策略研究针对电液伺服并联六自由度船舶模拟器的控制策略,本文采用了一种基于PID控制和模糊控制的复合控制策略。
该策略通过PID控制器对系统进行精确的定位控制,同时利用模糊控制器对系统进行动态调整,以适应不同的工作环境和负载变化。
此外,还采用了前馈控制和反馈控制的结合方式,以提高系统的响应速度和稳定性。
四、控制算法研究针对电液伺服并联六自由度船舶模拟器的控制算法,本文提出了一种基于遗传算法的优化控制算法。
该算法通过遗传算法对控制参数进行优化,以获得更好的控制效果。
在算法实现过程中,采用了离线优化和在线调整相结合的方式,以适应不同的工作环境和负载变化。
同时,还采用了卡尔曼滤波算法对传感器数据进行处理,以提高数据的准确性和可靠性。
五、实验与分析为了验证本文提出的控制策略和控制算法的有效性,我们进行了大量的实验和分析。
实验结果表明,采用PID控制和模糊控制的复合控制策略可以有效地提高系统的定位精度和动态性能。
同时,基于遗传算法的优化控制算法可以进一步提高系统的响应速度和稳定性。
此外,卡尔曼滤波算法的应用也有效地提高了传感器数据的准确性和可靠性。
《电液伺服并联六自由度船舶模拟器控制研究》
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着现代船舶技术的不断发展,船舶模拟器在船舶设计、试验和训练等领域的应用越来越广泛。
其中,电液伺服并联六自由度船舶模拟器作为一种重要的模拟器类型,其控制技术的研究具有重要意义。
本文旨在研究电液伺服并联六自由度船舶模拟器的控制技术,为船舶模拟器的应用提供理论支持和实践指导。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种基于电液伺服技术和并联六自由度原理的模拟器。
其核心原理是利用电液伺服系统实现对船舶六个方向运动的精确控制,并通过并联六自由度原理模拟出真实的船舶运动状态。
该模拟器具有高精度、高动态性能、高可靠性等特点,广泛应用于船舶设计、试验和训练等领域。
三、控制技术研究1. 控制策略研究电液伺服并联六自由度船舶模拟器的控制策略是关键技术之一。
本文采用先进的控制算法,如PID控制、模糊控制、神经网络控制等,对电液伺服系统进行优化控制。
同时,结合船舶运动的动力学模型,实现对船舶六个方向运动的精确控制。
2. 控制系统设计控制系统是电液伺服并联六自由度船舶模拟器的核心部分。
本文设计了一种基于PLC和DSP的控制系统,实现了对电液伺服系统的实时控制和监测。
同时,采用先进的故障诊断技术,对系统进行实时监测和故障诊断,确保系统的稳定性和可靠性。
3. 运动控制算法研究运动控制算法是实现电液伺服并联六自由度船舶模拟器精确控制的关键。
本文采用先进的运动控制算法,如逆动力学算法、前馈补偿算法等,实现对船舶六个方向运动的精确控制和协调。
同时,考虑船舶运动的非线性和时变性等特点,对算法进行优化和改进,提高系统的动态性能和稳定性。
四、实验研究为了验证电液伺服并联六自由度船舶模拟器控制技术的有效性和可靠性,本文进行了实验研究。
实验结果表明,该模拟器具有高精度、高动态性能和高可靠性等特点,能够精确地模拟出真实的船舶运动状态。
同时,该模拟器还具有较好的抗干扰能力和稳定性,能够满足船舶设计、试验和训练等领域的需求。
《电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着科技的不断进步,船舶模拟器在海洋工程、军事、航海等领域的应用越来越广泛。
电液伺服并联六自由度船舶模拟器作为一种高精度的模拟设备,其控制系统的研究具有重要的理论意义和实际应用价值。
本文旨在探讨电液伺服并联六自由度船舶模拟器的控制策略及其性能表现,以期为相关领域的研究和应用提供参考。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种能够模拟船舶在各种海况下运动特性的设备。
它主要由液压系统、控制系统、传感器等部分组成,具有六个自由度,可实现纵向、横向、垂向的位移和偏转等运动。
其中,电液伺服系统是模拟器的核心部分,其性能直接影响到模拟器的精度和稳定性。
三、控制系统策略研究针对电液伺服并联六自由度船舶模拟器的控制问题,本文提出了一种基于模糊控制的PID控制策略。
该策略结合了模糊控制和PID控制的优点,能够根据模拟器的实际运行状态,自适应地调整控制参数,从而提高系统的控制精度和稳定性。
在控制策略的实现过程中,首先需要建立系统的数学模型。
通过对液压系统、传感器等部分的建模,得到系统的传递函数和状态方程。
然后,根据系统的特性,设计合适的模糊控制器和PID控制器,并将两者结合起来,形成一种复合控制策略。
在实际运行中,控制系统根据传感器的反馈信息,不断调整控制参数,使模拟器能够准确地跟踪目标轨迹。
四、性能表现分析为了验证所提出的控制策略的有效性,我们进行了大量的实验和仿真分析。
实验结果表明,采用模糊控制的PID控制策略的电液伺服并联六自由度船舶模拟器,具有较高的控制精度和稳定性。
在各种海况下,模拟器都能够准确地跟踪目标轨迹,实现了高精度的船舶运动模拟。
此外,该控制策略还具有较强的抗干扰能力,能够在复杂的海洋环境中保持稳定的运行状态。
五、结论本文针对电液伺服并联六自由度船舶模拟器的控制问题,提出了一种基于模糊控制的PID控制策略。
通过实验和仿真分析,验证了该策略的有效性。
《电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言在海洋工程与船舶动力领域,电液伺服并联六自由度船舶模拟器扮演着重要的角色。
它不仅能够为船员提供真实、全方位的模拟训练环境,而且对于船舶动力系统的研发和性能测试具有重要意义。
随着科技的发展,电液伺服技术的运用愈发广泛,尤其是在模拟器的控制方面,其稳定性和精度要求愈加严格。
本文旨在探讨电液伺服并联六自由度船舶模拟器的控制原理及其研究进展。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种基于电液伺服技术的模拟设备,它能够模拟船舶在各种环境下的六自由度运动。
这六个自由度包括沿X轴、Y轴的平动以及绕X轴、Y轴、Z轴的转动。
通过电液伺服系统,模拟器能够精确地模拟出船舶在实际海况中的运动状态,为船员提供真实的训练环境。
三、电液伺服系统的工作原理与特点电液伺服系统是电液伺服并联六自由度船舶模拟器的核心部分。
它主要由伺服电机、液压泵、液压缸、传感器和控制系统等组成。
工作原理是通过控制系统发出指令,驱动伺服电机转动,进而驱动液压泵产生压力油,压力油通过液压缸驱动模拟器进行运动。
电液伺服系统的特点在于其高精度、高稳定性和快速响应性,能够满足船舶模拟器对运动控制的高要求。
四、控制策略研究针对电液伺服并联六自由度船舶模拟器的控制,研究人员提出了多种控制策略。
其中包括经典的控制算法如PID控制、模糊控制等,以及现代的控制方法如神经网络控制、自适应控制等。
这些控制策略通过优化控制系统,提高模拟器的运动精度和稳定性。
此外,针对船舶在海上遇到的各种复杂工况,研究人员还开发了多种模式切换控制策略,以满足不同工况下的控制需求。
五、实验研究与结果分析为了验证电液伺服并联六自由度船舶模拟器的控制效果,研究人员进行了大量的实验研究。
通过对比不同控制策略下的模拟器运动性能,发现采用神经网络控制的模拟器在运动精度和稳定性方面表现优异。
此外,针对不同工况下的模式切换控制策略进行了实验验证,结果表明该策略能够有效地提高模拟器在不同工况下的适应能力。
《2024年电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言随着船舶技术的不断发展,船舶的动态模拟和控制系统的研究逐渐成为重要课题。
其中,电液伺服并联六自由度船舶模拟器控制研究作为重要的研究领域,不仅有助于提升船舶操作的安全性和效率,还有助于在模拟实验中预测和验证新型船舶技术的性能。
本文将就电液伺服并联六自由度船舶模拟器的控制策略进行深入研究,探讨其关键技术和挑战。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种用于模拟船舶在各种环境条件下的运动特性的设备。
该模拟器通过电液伺服系统实现六自由度运动,包括横摇、纵摇、垂荡、横荡、纵荡和艏摇等。
这种模拟器具有高精度、高动态响应等特点,能够真实地模拟船舶在各种环境条件下的运动。
三、控制策略及关键技术1. 控制系统设计电液伺服并联六自由度船舶模拟器的控制系统主要由上位机和下位机两部分组成。
上位机负责实现控制算法的编写和运算,下位机则负责接收上位机的指令并驱动电液伺服系统实现六自由度运动。
在控制策略上,采用先进的PID控制算法和模糊控制算法相结合的方式,实现对船舶运动的高精度控制。
2. 电液伺服系统电液伺服系统是电液伺服并联六自由度船舶模拟器的核心部分,其性能直接影响到模拟器的运动精度和动态响应。
电液伺服系统主要由液压泵站、液压缸、伺服阀等部分组成。
为了提高系统的稳定性和响应速度,采用先进的液压技术和电子技术,如比例阀控制、压力闭环控制等。
3. 传感器技术传感器技术是实现电液伺服并联六自由度船舶模拟器高精度控制的关键技术之一。
通过安装各种传感器,如角度传感器、速度传感器等,实时监测船舶的运动状态,并将数据传输给上位机进行运算和控制。
为了提高传感器的精度和可靠性,采用高精度的传感器和先进的信号处理技术。
四、挑战与展望1. 挑战在电液伺服并联六自由度船舶模拟器的控制研究中,面临的挑战主要包括:如何实现高精度的运动控制、如何提高系统的稳定性和响应速度、如何降低能耗等。
《2024年电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言在海洋工程与船舶研究领域,船舶动态模拟器因其能模拟真实环境下的船舶运动,成为研究船舶操控性能、海况适应能力的重要工具。
近年来,随着技术的进步,电液伺服并联六自由度船舶模拟器因其高精度、高稳定性的特点,得到了广泛的应用。
本文将重点研究电液伺服并联六自由度船舶模拟器的控制策略,探讨其控制系统的设计与优化。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种基于电液伺服系统的高精度船舶运动模拟装置。
它通过模拟船舶在各种海况下的六自由度运动,为研究人员提供了一种有效的实验手段。
该系统主要由液压驱动系统、控制系统、传感器系统等组成,其中控制系统是模拟器的核心部分。
三、控制系统设计电液伺服并联六自由度船舶模拟器的控制系统设计是关键环节。
系统采用并联控制策略,以实现对六个方向运动的精确控制。
该控制系统的设计主要分为以下几个部分:1. 传感器部分:通过安装于模拟器各个方向的高精度传感器,实时监测模拟器的位置、速度和加速度等信息,为控制系统提供反馈信号。
2. 控制算法部分:采用先进的控制算法,如PID控制、模糊控制等,对传感器反馈的信号进行处理,并输出控制指令。
3. 驱动部分:驱动部分采用电液伺服系统,根据控制指令驱动模拟器进行运动。
四、控制策略研究电液伺服并联六自由度船舶模拟器的控制策略研究是提高模拟器性能的关键。
本文重点研究以下两个方面的控制策略:1. 优化PID控制算法:通过对PID控制算法进行优化,提高系统的响应速度和稳定性,实现对船舶运动的精确控制。
2. 引入模糊控制:针对非线性、时变性的船舶运动特性,引入模糊控制策略,提高系统的自适应能力和鲁棒性。
五、实验与结果分析为了验证所设计的控制系统及控制策略的有效性,进行了大量的实验。
实验结果表明,优化后的PID控制算法和引入模糊控制的控制系统均能实现对船舶运动的精确控制,且具有较高的稳定性和鲁棒性。
《2024年电液伺服并联六自由度船舶模拟器控制研究》范文
《电液伺服并联六自由度船舶模拟器控制研究》篇一一、引言在海洋工程和船舶动力学研究领域,模拟器扮演着至关重要的角色。
其中,电液伺服并联六自由度船舶模拟器以其高精度、高动态响应的特性,被广泛应用于船舶操控性能测试、船员培训以及科研实验等方面。
本文旨在研究电液伺服并联六自由度船舶模拟器的控制策略,以提高其控制精度和稳定性,为实际应用提供理论支持。
二、电液伺服并联六自由度船舶模拟器概述电液伺服并联六自由度船舶模拟器是一种利用电液伺服系统实现船舶六自由度运动的模拟装置。
该系统包括六个独立的液压驱动单元,分别控制船舶的六个自由度运动:沿X轴和Y轴的平动、绕X轴和Y轴的转动以及绕Z轴的垂荡运动。
每个液压驱动单元都采用电液伺服系统,通过精确控制液压阀的开度,实现对船舶运动的精确控制。
三、控制策略研究1. 控制器设计针对电液伺服并联六自由度船舶模拟器的控制策略,本文采用先进的控制器设计方法。
首先,建立系统的数学模型,包括液压驱动单元、传感器、执行器等各部分的动态特性。
然后,根据模型设计控制器,包括PID控制器、模糊控制器等,以实现对船舶运动的精确控制。
2. 控制算法优化为了提高控制精度和稳定性,本文对控制算法进行优化。
采用优化算法对控制器参数进行整定,以适应不同工况下的船舶运动。
同时,采用自适应控制、鲁棒控制等先进控制方法,提高系统的抗干扰能力和适应性。
3. 并联控制策略针对六个自由度运动的并联控制策略,本文采用分散-协调控制方法。
将每个液压驱动单元视为一个子系统,分别进行控制。
同时,通过协调各子系统的运动,实现六个自由度的协同运动。
在控制过程中,采用优化算法对各子系统的运动进行优化,以实现整体性能的最优。
四、实验与分析为了验证控制策略的有效性,本文进行了实验分析。
首先,在模拟器上进行了单自由度运动的实验,验证了电液伺服系统的精确性和响应速度。
然后,进行了多自由度协同运动的实验,验证了并联控制策略的有效性。
实验结果表明,本文提出的控制策略能够实现对船舶运动的精确控制,具有较高的控制精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一 丁~ 一 厂 … 厂 … 厂
数 捌 最 镶
i
J 位 I
l
遥 动 制 卜
:
牛 _ l 『 的 们 服 电 桃 动 器
:
{ 的 f 州 乜
一
_ I _ _ 一 一 一 — 一 — 一 一 ! 一 . . 王 一
点 j 【 、 浪 矗 碱 摇 I 水 刈 J 力 溅 I _ l 、 池
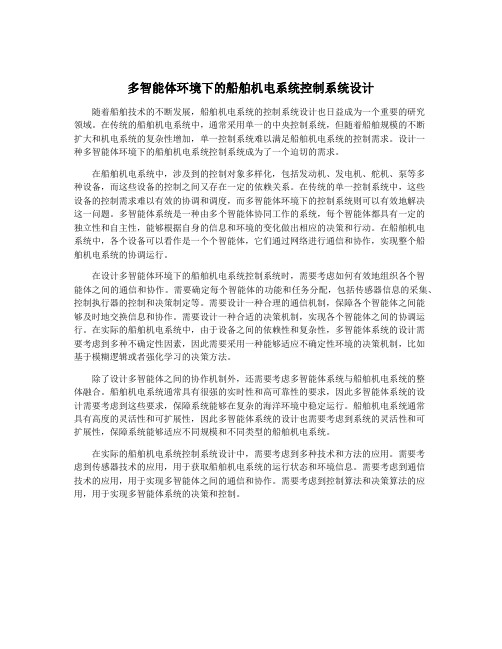
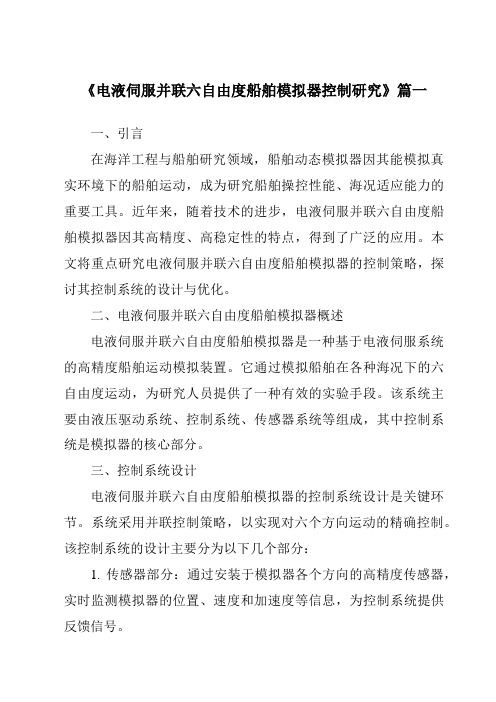
图 1 系 统 中 5个 独 立 的 控 制 面 板 三 、 系 统 实 施 方 案
1 . 总体 方 案
扳
酩
I摧
蛸
板
试 验 船 模 电伺 服 系 统 航 行 自控 原 理 样 机 的 总 体 方 案 如 图
收 稿 日期 :2 01 3 — 1 0 — 2 6
减 摇 鳍 用于 将 鳍 伸 到 海 中 ,利 用 它 从 水 流 中获 得 的 交 替 变 化 的升 力 ,使 船 舶复 原 ,以便 减 少 船体 横摇 。 按 是 否 有 副 鳍 可 分 为 有 襟 翼 和 无 襟 翼 的减 摇 鳍 ,按 是 否
逑 f
_
感 嚣
感 错
逑 搜
_
并延伸到整个 板宽度 范围内很短 的薄板 ;能在船体起 到 “ 虚 长度”作 用 ,同时改善尾 部兴波 ,减少船 体 的剩余 阻力。本 控制对象包括 5个独 立的控制面板 。即:1个 T型水翼 ,2
个减 摇 鳍 , 2个 压 浪 板 。 各 个 控 制 面 板 的在 分 布 上 大 致 如 图 1
第 1 4卷 第 1 期
2 01 4住
中 国
水
运 No 1 201 4Fra bibliotek 1月
O h i n a Wa ter Tr ans p or t
综 合试验船模 电伺服控制 系统设计
喻 浩
( 江南造船 ( 集 团 )有 限 责 任 公 司 军 事代 表 室 ,上 海 2 0 0 0 1 1)
可 以折叠放置可 以分为可折叠与 不可折叠 的减摇 鳍。
减 摇 鳍 的 襟 翼 是 安 装 在 减 摇 鳍 后 缘 附 近 的翼 面 , 是 后 缘
作者简介 :喻
浩 ,江南造船 ( 集 团)有 限责任公 司 军事代表室 。
1 1 2
中 国 水 运
第1 4卷
的 一 部 分 。可 以 绕轴 向 后 下 方 偏 转 ,从 而 增 大 减 摇 鳍 的 弯 度 ,
翼 的减 摇 鳍 的情 况 。 对 左 右 减摇 鳍 采 用 同步 控 制 ,实 时 检 测 两 鳍位 置 反 馈 信
本 控 制 系 统 的船 舶 模 型 是 带 T 型 翼 、减 摇 鳍 、 压 浪 板 的 双体 船 ,T 型 翼 是 带 主 动 式 转 动 后 翼 板 的翼 面 , 用 以 大 幅 减 轻 纵 摇 。减 摇 鳍 利 用它 从 水 流 中获 得 的 交 替 变 化 的升 力 ,使 船 舶 复 原 ,以 便 减 少 船 体 横 摇 。尾 压 浪 板 是 安 装 在 船 尾 之 下 ,
作 的 角 度 和 角 速 度 数 据 , 并将 数 据 传 递 给 集 中监 测控 制 操 作
穿} 良 双体 船是近年 国外 开发 的新船 型 ,它在较高 的海况 仍可兼具 高航速和适航性 。它艏部 的特殊 线型 ,使其 能以平
稳 的 姿 态 在 波 涛 汹 涌 的 海 浪 中穿 浪 而 过 _ l ;它 的 双 体 特 征 又 赋 予 它 良好 的 稳 定 性 ,但 穿 浪 船 在 波 长 较 小 和 较 大 时 纵摇 的 改 善 不 够 明显 【 3 】 。为 使 穿 浪船 适合 于 更 多 的海 况 ,改 善 运 动 性 能 ,本 文 对 带 T 型 翼 、 减 摇 鳍 、 压 浪 板 的运 动 姿 态 控 制 系 统的设计方法进行研 究。
二 、船 型 介绍
台用于相 应的面板 调节。
电流 传感 器 用 于 测 量 电机 电流 ,使 电机 能 尽 量 在 允 许 的
前提 下快速启 动 ,提 高系统响应精度和响应时间 。
^ 舷 线 } 加 述 螋 化 『 n 艘 { 0 】 舷 线 c
( 3 )电磁 抱 闸装 置 ,出于 安 全 考 虑 ,机 械 限位 装 置 是必
提 高鳍的升力。 襟翼一般 由位于 鳍中的 电动机经 由传 动系统驱动 , 由于 船模较小 ,襟 翼的驱动系统 非常精细 ,且减摇鳍 的主 要作 用 部分是减摇鳍 的主面板 ,因此 ,该 系统暂考虑使用 的是 无襟
摘
要 :穿浪双 体船具有 高航速和适 航性 ,但在波长较小和 较大的情 况下稳定性并不好 ,带有水动力 翼、减摇 鳍和
压浪板 的双体船 可在保 留穿浪双体 船优势的基础上提升其适 航性 ,对 其综合试验船模 电伺服控制 系统 可为双体船的 研究提供宝 贵的实验资料 。
关 键 词 :穿 浪 双 体 船 ,减 摇 鳍 ,控 制 系 统
中 图分 类号 :T P 2 9 文 献 标 识码 :A 文 章 编 号 :1 0 0 6 — 7 9 7 3( 2 0 1 4 )0 1 — 0 1 1 1 — 0 3
、
一
、
引言
速度 指标达到动作标准 时 ,集 中监测控制系统通 过算法发 出 相应 的控制面板 动作指 令。 伺服 电机 驱动器接收 到动作指令 ,驱动伺服 电机 动作 , 伺服 电机 接受动作指令产 生响应 ,带动控制 面板 旋转 ,使 T 形翼 ,减 摇鳍 ,压浪板动作 ,电机 连接 的角度编码器 记录动
2所 示 。
图 2 航 行 自控 系统 原 理样 机 的 总体 方 案
2 . 减 摇 鳍 控 制 方 案
航行姿态 的传感器类型 主要包含线 加速 度计、角速 度传 感器 ,角度传 感器 ,将传感 器通过运动控制 卡连接到集 中检 测控制计算机 。 航行 自控 系统集成软件通 过对数据进行 分析处理 ,在 传 感器 测量到 的纵摇、横摇 角度 ;纵摇 、横摇 角速度 ,垂 荡加