伺服驱动系统设计方案
CK6140数控车床主传动系统及进给伺服系统设计
__届毕业(设计)论文题目CK6140数控车床主传动系统及进给伺服系统设计专业班级学号学生姓名随笔客指导教师指导教师职称学院名称机电工程学院完成日期: 2014 年 5 月 25日CK6140数控车床主传动系统及进给伺服系统设计CK6140 CNC lathe main drive system and feed servo system design学生姓名指导教师摘要本文介绍了CK6140数控车床的组成及工作原理,对数控机床的主要组成部分:机床主轴箱,进给伺服系统及主轴PLC控制进行了总体的设计及其详细设计。
数控机床是现代机电一体化的典型产品,对提高零件的加工质量和加工效率具有较好的作用。
在本次设计中,主要完成了以下工作:根据给出的要求,首先确定设计要求给出的已知条件确定电机的型号和功率,传动系统的布局,变速方式,开停方式,换向方式,制动方式及齿轮的排列与布置。
然后根据转速范围及级数确定它的转速图、各齿轮的齿数和传动系统简图。
在根据已确定传动比来确定带传动。
通过轴的初步设计,进行齿轮的设计和校核。
选取相应的轴承和键,进行轴的具体设计和校核,键和轴承的设计和校核。
最后进行装配图和各个零件图的绘制,完成主轴箱的设计。
然后完成伺服系统的设计。
在对进给伺服系统进行设计时,要确定进给传动系统的传动方式及控制系统的形式。
设计中,选择进给伺服系统为开环控制系统。
通过给定的参数选择好步进电机的步距角可确定传动齿轮的传动比及滚珠丝杆的导程。
设计的进给伺服系统能够满足设计任务的要求。
关键词:数控机床主轴箱进给伺服系统AbstractThis thesis introduced the constitution and working principle of CK6140 machine tool,the primarily parts of NC machine tool designed:including proceeds the total design and detailed design. NC machine tool is a modern machine to give or get an electric shock the integral whole the typical model of technique the processing of product, right exaltation spare parts the quantity with process the efficiency to have the good function. In this design,primarily completed following work.According to the timetable to design. First identified design requirements given the known conditions determine the type and electrical power, drivetrain system layout, speed change, stop the way for the way braking and gear configuration and the way layout. Based on rotational speed and scope of the class to determine its rotational speed maps, the various gear and drivetrain system Chishu sketch. In accordance with established transmission belt transmission than to determine. Through axle of the preliminary design, gear design and verification. The bearings and get used to a specific axle design and verification, design and verification keys and bearings. Final assembly of the various parts and mapping. Completed the design of headstock.Then completing the design of the servomechanism system. In designing of servo system, we can determine driving mode of driving system and controlling mode of controllingsystem,choosing the servo system for opening wreath control the system.Passing the parameter to settle the choice the good step the step for the electrical engineering the distance cape can make sure to spread to move the spreading of wheel gear to move the radio the roll the bead silk the think stick's lead. Design of into give the servo system can satisfy to designthe request of the mission.Keywords:NC Machine Tool;Axis Housing;Servomechanism目录摘要 (Ⅰ)Abstract (Ⅱ)第一章卧式数控车床简介 (1)1.1数控车床简介 (1)1.2 CK6140介绍及设计说明 (2)1.3设计任务 (3)第二章 CK6140总体设计计算 (6)2.1总体设计要求 (6)2.2机床的总体布局的确定 (7)2.3换向方向的选择 (7)2.4开停方式选择 (8)2.5 制动方式选择 (8)2.6 齿轮布置与排布 (8)2.7 变速方式选择 (9)2.8进给系统的组成及选用 (10)第三章主变速箱总体设计 (12)3.1电机的选用 (12)3.2传动方案的拟定 (15)3.3确定各级的转速.................................... 错误!未定义书签。
伺服电机控制系统毕业论文设计
调速应用领域最初用得最多的是直流电机,随着交流调速技术特别是电力电子技术和控制技术的发展,交流变频技术获得了广泛应用,变频器和交流电动机迅速渗透到原来直流调速系统的绝大多数应用领域。近几年来,由于直流伺服电动机体积小、重量小和高效节能等一系列优点,中小功率的交流变频系统正逐步被直流伺服电动机系统所取代,特别是在纺织机械、印刷机械等原来应用变频系统较多的领域,而在一些直接由电池供电的直流电机应用领域,则更多的由直流伺服电动机所取代。
This article mainly discusses the designations of three-phase BLDCM velocity modulation system. The master controlled unit is BLDCM special-purpose control chip 80C196MC, assistanceswith the keyboard, the monitor, examines the electric circuit, the power electric circuit, actuates the electric circuit, the protection circuit and so on. The BLDCM with 3 Hall sensors establishing inside, to exam the position of the rotor and decide the phase change of electricalmachinery, the system calculates the rotational speed of the electrical machinery to realize the velocity-feedback control according to the Hall signal.
直流伺服电机控制系统设计

电子信息与电气工程系课程设计报告设计题目:直流伺服电机控制系统设计系别:电子信息与电气工程系年级专业:学号:学生姓名:2006级自动化专业《计算机控制技术》课程设计任务书摘要随着集成电路技术的飞速发展,微控制器在伺服控制系统普遍应用,这种数字伺服系统的性能可以大大超过模拟伺服系统。
数字伺服系统可以实现高精度的位置控制、速度跟踪,可以随意地改变控制方式。
单片机和DSP在伺服电机控制中得到了广泛地应用,用单片机作为控制器的数字伺服控制系统,有体积小、可靠性高、经济性好等明显优点。
本设计研究的直流伺服电机控制系统即以单片机作为核心部件,主要是单片机为控制核心通过软硬件结合的方式对直流伺服电机转速实现开环控制。
对于伺服电机的闭环控制,采用PID控制,利用MATLAB软件对单位阶跃输入响应的PID 校正动态模拟仿真,研究PID控制作用以及PID各参数值对控制系统的影响,通过试凑法得到最佳PID参数。
同时能更深度地掌握在自动控制领域应用极为广泛的MATLAB软件。
关键词:单片机直流伺服电机 PID MATLAB目录1.引言 ...................................................... 错误!未定义书签。
2.单片机控制系统硬件组成.................................... 错误!未定义书签。
微控制器................................................ 错误!未定义书签。
DAC0808转换器.......................................... 错误!未定义书签。
运算放大器............................................... 错误!未定义书签。
按键输入和显示模块....................................... 错误!未定义书签。
伺服驱动器硬件设计方案
伺服驱动器硬件设计方案伺服驱动器的硬件研发主要包括控制板和电源板的设计,控制板承担与上位机进行交互和实时生成精准的PWM信号。
电源板的作用根据PWM信号,利用调制的原理产生特定频率,特定相位和特定幅值的三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板的架构主要的任务就是核心器件的选择。
安川、西门子等国际知名的公司都是采样ASIC的方式的芯片,这样就可以按照自己的设计需要来制造专用于伺服控制的芯片,由于采样ASIC方式,所以芯片的运行速度非常快,那么就比较容易实现电流环的快速响应,并且可以并行工作,那么也很容易实现多轴的一体化设计。
采样ASIC的方式有很多的好处,比如加密等。
但是采样ASIC的风险和前期的投入也是非常的巨大的,并且还要受该国的芯片设计和制造工艺的限制。
根据我国的实际的国情和国际的因素等多种原因,核心芯片比较适宜采样通用的DSP,ARM等处理器,比如Ti的C2000飞思卡尔的K60,英飞凌的XE164等。
研究台达的伺服驱动器发现其架构是采用Ti的DSP 2812+CPLD,这和我们公司GSK的方案基本一样。
我们也是采用DSP2812加CPLD(EPM570T144)来实现核心的控制功能。
2)核心器件的控制功能的分工。
DSP实现位置环、速度环、电流环的控制以及利用事件管理器PWM接口实现产生特定的PWM信号。
可以利用其灵活的编程特性快速的运算能力实现特定的控制算法等,还可以利用其自身的A/D完成对电机电流的转换,但是DSP自身的A/D精度普遍较低,并且还受基准电压电源的纹波PCB的LAYOUT模数混合电路的处理技巧影响,所以高档的伺服几乎都采用了外部A/D来完成电流采样的处理。
比如路斯特安川等。
也有一些高档的伺服使用一些特殊的电流传感器,该传感器的输出已经是数字信号,这样就可以节省了外部A/D芯片和增强抗干扰能力。
如西门子的变频器采用ACPL7860,发那克用于机器人的六驱一体的伺服也是采用了ACPL7860,西门子的伺服S120采用了Ti的芯片AMC1203。
直流伺服系统设计

02 直流伺服系统设计基础
CHAPTER
电机选择
根据系统需求选择合适的电机 类型,如无刷直流电机、有刷 直流电机等。
考虑电机的扭矩、转速、尺寸 和重量等参数,以确保电机能 够满足系统性能要求。
考虑电机的效率和温升,以降 低能耗和提高系统稳定性。
驱动器设计
根据电机类型和系统需求,设计合适的驱动器电路,包括电源、控制信号、保护电 路等。
工作原理
控制器
控制器是直流伺服系统的核心部 分,负责接收指令信号,并与电 机反馈信号进行比较,根据比较
结果输出控制信号。
电机
直流电机是系统的执行元件,根据 控制信号调整电机的输入电流或电 压,从而实现精确的运动控制。
反馈装置
为了实现精确控制,直流伺服系统 ቤተ መጻሕፍቲ ባይዱ常配备位置、速度或力矩传感器 等反馈装置,将实际运动状态反馈 给控制器。
霍尔编码器
霍尔编码器也具有较高的测量精度和可靠性,适用于对测量精度 要求较高的应用。
磁编码器
磁编码器利用磁场变化来测量转速和位置,具有较小的体积和较 高的测量精度。
控制器
1 2
微控制器
微控制器是伺服控制系统的核心,负责接收输入 信号、计算输出信号并控制伺服系统的运行。
数字信号处理器
数字信号处理器具有较高的计算能力和数据处理 能力,适用于对计算能力要求较高的应用。
3
可编程逻辑控制器
可编程逻辑控制器适用于需要自动化控制和逻辑 运算的应用,具有较好的可靠性和稳定性。
驱动器
晶体管驱动器
晶体管驱动器利用晶体管的开关特性 来控制电流的通断,具有较快的响应 速度和较大的输出电流。
继电器驱动器
继电器驱动器利用继电器的触点开关 来控制电流的通断,适用于对输出电 流要求较低的应用。
伺服驱动系统设计方案及对策

伺服驱动系统设计方案及对策一、硬件设计方案及对策:1.选用高性能的伺服电机和驱动器:根据具体需要选择适合的伺服电机和驱动器,确保其具备足够的功率和控制精度。
在选择过程中,需要对驱动器的技术参数进行充分了解,并评估其适用性和可靠性。
2.采用合适的编码器:编码器用于测量电机的位置和速度,对伺服驱动系统的控制精度至关重要。
选择合适的编码器,能够提供高分辨率和高精度的反馈数据,并且具备良好的抗干扰性能。
3.电源设计:伺服驱动系统对电源质量和稳定性要求较高,需要提供稳定的电源供应和电磁兼容性设计,避免电源波动对系统性能的影响。
4.散热设计:伺服电机和驱动器在运行时会产生较大的热量,必须进行有效的散热设计,以确保系统的稳定性和可靠性。
可采用风扇散热、散热片等方式来降低温度。
5.机械设计:在伺服驱动系统中,机械结构的设计对系统性能有很大影响。
需要针对具体应用场景选择合适的传动方式和结构设计,考虑到负载、速度、精度等因素。
6.停电保护设计:为了避免突发停电导致系统损坏,可以设计备用电池或超级电容器等储能装置,以保证在停电短时间内继续工作并正常停机。
二、软件设计方案及对策:1.控制算法设计:通过对伺服电机的位置、速度和加速度等参数进行精细控制,实现对运动轨迹的准确控制。
设计合理的控制算法,能够提高系统的控制精度和稳定性。
2.运动控制软件设计:根据伺服驱动系统的应用需求,设计合理的运动控制软件,包括运动插补算法、软件调速、位置校正等功能。
3.通信接口设计:伺服驱动系统通常需要与上位机或其他设备进行通信,需要设计合适的通信接口,以实现数据传输和控制。
4.用户界面设计:为了方便用户操作和监测系统运行状态,可以设计友好的用户界面,包括参数设置、故障诊断、实时监控等功能。
5.系统诊断与故障检测设计:通过设计合理的系统诊断和故障检测功能,可以检测和排除系统故障,提高系统的可靠性和稳定性。
三、通信网络设计方案及对策:1.选择适当的通信协议:根据伺服驱动系统所处的应用环境和通信要求,选择适当的通信协议,如CAN总线、以太网等。
伺服驱动器硬件设计方案

伺服驱动器硬件设计方案伺服驱动器得硬件研发主要包括控制板与电源板得设计,控制板承担与上位机进行交互与实时生成精准得PWM信号。
电源板得作用根据PWM信号,利用调制得原理产生特定频率,特定相位与特定幅值得三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板得架构主要得任务就就是核心器件得选择。
安川、西门子等国际知名得公司都就是采样ASIC得方式得芯片,这样就可以按照自己得设计需要来制造专用于伺服控制得芯片,由于采样ASIC方式,所以芯片得运行速度非常快,那么就比较容易实现电流环得快速响应,并且可以并行工作,那么也很容易实现多轴得一体化设计。
采样ASIC得方式有很多得好处,比如加密等。
但就是采样ASIC得风险与前期得投入也就是非常得巨大得,并且还要受该国得芯片设计与制造工艺得限制.根据我国得实际得国情与国际得因素等多种原因,核心芯片比较适宜采样通用得DSP,ARM等处理器,比如Ti得C2000飞思卡尔得K60,英飞凌得XE164等。
研究台达得伺服驱动器发现其架构就是采用Ti得DSP 2812+CPLD,这与我们公司GSK得方案基本一样。
我们也就是采用DSP2812加CPLD(EPM570T144)来实现核心得控制功能。
2)核心器件得控制功能得分工.DSP实现位置环、速度环、电流环得控制以及利用事件管理器PWM接口实现产生特定得PWM信号。
可以利用其灵活得编程特性快速得运算能力实现特定得控制算法等,还可以利用其自身得A/D完成对电机电流得转换,但就是DSP自身得A/D精度普遍较低,并且还受基准电压电源得纹波PCB得LAYOUT模数混合电路得处理技巧影响,所以高档得伺服几乎都采用了外部A/D来完成电流采样得处理。
比如路斯特安川等.也有一些高档得伺服使用一些特殊得电流传感器,该传感器得输出已经就是数字信号,这样就可以节省了外部A/D芯片与增强抗干扰能力。
如西门子得变频器采用ACPL7860,发那克用于机器人得六驱一体得伺服也就是采用了ACPL7860,西门子得伺服S120采用了Ti得芯片AMC1203。
英飞凌XC2267 电机控制系统设计方案
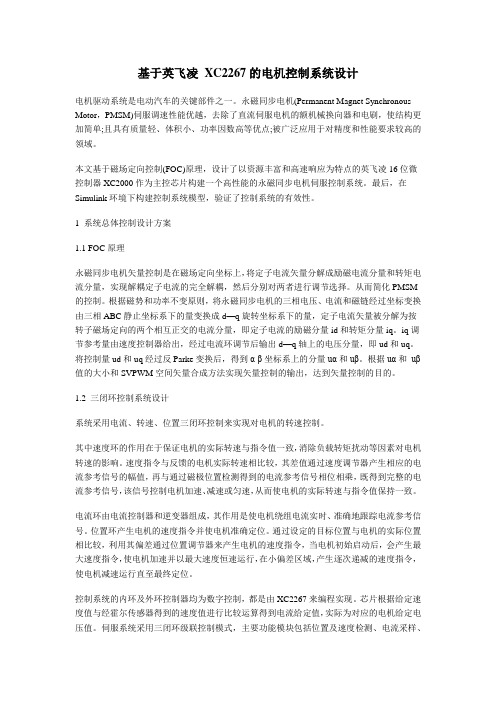
基于英飞凌XC2267的电机控制系统设计电机驱动系统是电动汽车的关键部件之一。
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)伺服调速性能优越,去除了直流伺服电机的额机械换向器和电刷,使结构更加简单;且具有质量轻、体积小、功率因数高等优点;被广泛应用于对精度和性能要求较高的领域。
本文基于磁场定向控制(FOC)原理,设计了以资源丰富和高速响应为特点的英飞凌16位微控制器XC2000作为主控芯片构建一个高性能的永磁同步电机伺服控制系统。
最后,在Simulink环境下构建控制系统模型,验证了控制系统的有效性。
1 系统总体控制设计方案1.1 FOC原理永磁同步电机矢量控制是在磁场定向坐标上,将定子电流矢量分解成励磁电流分量和转矩电流分量,实现解耦定子电流的完全解耦,然后分别对两者进行调节选择。
从而简化PMSM 的控制。
根据磁势和功率不变原则,将永磁同步电机的三相电压、电流和磁链经过坐标变换由三相ABC静止坐标系下的量变换成d—q旋转坐标系下的量,定子电流矢量被分解为按转子磁场定向的两个相互正交的电流分量,即定子电流的励磁分量id和转矩分量iq。
iq调节参考量由速度控制器给出,经过电流环调节后输出d—q轴上的电压分量,即ud和uq。
将控制量ud和uq经过反Parke变换后,得到α-β坐标系上的分量uα和uβ。
根据uα和uβ值的大小和SVPWM空间矢量合成方法实现矢量控制的输出,达到矢量控制的目的。
1.2 三闭环控制系统设计系统采用电流、转速、位置三闭环控制来实现对电机的转速控制。
其中速度环的作用在于保证电机的实际转速与指令值一致,消除负载转矩扰动等因素对电机转速的影响。
速度指令与反馈的电机实际转速相比较,其差值通过速度调节器产生相应的电流参考信号的幅值,再与通过磁极位置检测得到的电流参考信号相位相乘,既得到完整的电流参考信号,该信号控制电机加速、减速或匀速,从而使电机的实际转速与指令值保持一致。
《伺服控制系统课程设计》

《伺服控制系统课程设计》指导书⾃动化与电⼦⼯程学院⼆零⼀⼋年⼗⽉⼀、伺服控制系统课程设计的意义、⽬标和程序 (3)⼆、伺服控制系统课程设计内容及要求 (5)三、考核⽅式和报告要求 (11)⼀、伺服控制系统课程设计的意义、⽬标和程序(⼀)伺服控制系统程设计的意义伺服控制系统课程设计是⾃动化专业⼈才培养计划的重要组成部分,是实现培养⽬标的重要教学环节,是⼈才培养质量的重要体现。
通过伺服控制系统课程设计,可以培养考⽣⽤所学基础课及专业课知识和相关技能,解决具体的⼯程问题的综合能⼒。
本次课程设计要求考⽣在指导教师的指导下,独⽴地完成伺服控制系统的设计和仿真,解决与之相关的问题,熟悉伺服控制系统中控制器设计与整定、电机建模和仿真和其他检测装置的选型以及⼯程实践中常⽤的设计⽅法,具有实践性、综合性强的显著特点。
因⽽对培养考⽣的综合素质、增强⼯程意识和创新能⼒具有⾮常重要的作⽤。
伺服控制系统课程设计是考⽣在课程学习结束后的实践性教学环节;是学习、深化、拓宽、综合所学知识的重要过程;是考⽣学习、研究与实践成果的全⾯总结;是考⽣综合素质与⼯程实践能⼒培养效果的全⾯检验;也是⾯向⼯程教育认证⼯作的重要评价内容。
(⼆)课程设计的⽬标课程设计基本教学⽬标是培养考⽣综合运⽤所学知识和技能,分析与解决⼯程实际问题,在实践中实现知识与能⼒的深化与升华,同时培养考⽣严肃认真的科学态度和严谨求实的⼯作作风。
使考⽣通过综合课程设计在具备⼯程师素质⽅⾯更快地得到提⾼。
对本次课程设计有以下⼏⽅⾯的要求:1.主要任务本次任务在教师指导下,独⽴完成给定的设计任务,考⽣在完成任务后应编写提交课程设计报告。
2.专业知识考⽣应在课程设计⼯作中,综合运⽤各种学科的理论知识与技能,分析和解决⼯程实际问题。
通过学习、研究和实践,使理论深化、知识拓宽、专业技能提⾼。
3.⼯作能⼒考⽣应学会依据课程设计课题任务进⾏资料搜集、调查研究、⽅案论证、掌握有关⼯程设计程序、⽅法和技术规范。
机电一体化第六章伺服驱动控制系统设计
钟。 F.体积小、自定位和价格低是步进电动机驱动控制的三大优势。 G. 步进电机控制系统抗干扰性好
上一页 下一页
二、 伺服驱动控制系统设计的基本要求
1. 高精度控制 2. 3. 调速范围宽、低速稳定性好 4. 快速的应变能力和过载能力强 5. 6.
闭环调节系统。
(4) ①
② 调节方法。
(5) ① 使用仪器。用整定电流环的仪器记录或观察转速实际值波形,电
② 调节方法。
上一页 下一页
六、 晶体管脉宽(PWN)直流调速系统
晶体管脉宽直流调速系统与用频率信号作开关的晶闸管系统相比,具 (1) 由于系统主电源采用整流滤波,因而对电网波形影响小,几乎不 (2) 由于晶体管开关工作频率很高(在2 kHz左右),因此系统的 (3) 电枢电流的脉动量小,容易连续,不必外加滤波电抗器也可平稳 (4) 系统的调速范围很宽,并使传动装置具有较好的线性,采用Z2
上一页 下一页
(2) ① A. 步进电动机型号:130BYG3100D (其他型号干扰大) B. 静转矩15 N·m C. 步距角0.3°/0 6°
D. 空载工作频率40 kHz E. 负载工作频率16 kHz ② A. 驱动器型号ZD-HB30810 B. 输出功率500 W C. 工作电压85~110 V D. 工作电流8 A E. 控制信号,方波电压5~9 V,正弦信号6~15 V ③ 控制信号源。
(3) ① 标准信号控制系统(如图6-16) ②检测信号控制系统 (如图6-17)
③ 计算机控制系统(如图6-18)
上一页 返 回
图6-16 标准信号控制系统图 图6-17 检测信号控制系统图 图6-18 计算机控制系统图
伺服控制工程课程设计报告
一.设计要求和条件本课程设计要求选择步进电机和交流伺服电机为驱动装置,以可编程控制器(PLC)为控制器,配合相应的伺服驱动器,设计并实现伺服电机对异步电机速度的跟随控制系统。
要求了解相关检测元件,掌握系统搭建的基本方法,用触摸屏设计监控界面,完成系统的程序编写与调试,并完成设计说明书的编写。
二. 设计目的通过在实验平台上完成伺服电机对异步电机速度的跟随控制,巩固和深化所学的专业理论,提高解决实际问题的能力。
使我们了解伺服控制系统的应用领域;掌握常用检测元件的选择和使用;掌握各种伺服驱动器的使用方法;能够设计并实现基本伺服运动控制电路;三.设计方案论证(一).硬件的选择:台达ASD-A0421-AB系列伺服驱动器,VFD-M系列变频器,ECMA-C30604ES伺服电机,台达DVP40ES00T2系列PLC,台达触摸屏DOP-A57BSTD,增量式编码器和异步电机。
(二).硬件的介绍:(1)VFD-M系列变频器:变频器面板主要包括:编程/功能选择键,资料确认键,频率设定旋钮,启动运行,停止按钮等此次设计中用到的几个重要变频器参数设定:P 00: 04 数字操作器上的V.R.控制P 01: 00 运转指令有数字操作器控制P 02: 00 电机以减速刹车方式停止01 电机一自由运转方式停止P 03: 50.00~400.00HZ 最高操作频率选择P 04: 10.00~400.00HZ 最大电压频率选择(2)台达ASD-A0421-AB系列伺服驱动器:伺服驱动器的连接器与端子:L1,L2为控制回路电源输入端,U,V,W为电机连接线,CN1为I/O连接器,CN2为编码器连接器,CN3通讯口连接器。
主要参数设定:P1-00=2(外部脉冲列指令输入形式设定)P1-01=0(控制模式及控制命令输入源设定)P2-10=101(数字输入接脚DI1功能规划)P2-11=104(数字输入接脚DI2功能规划)P1-02=00(速度及扭距限制设定)(三). 系统结构框图:根据试验台的架构和实验要求此次设计的系统框图如下图所示:四.系统流程图:此设计所用的设备有台达变频器,异步电机,旋转编码器,台达PLC,伺服电机等,台达变频器控制异步电机,通过改变频率来改变异步电机速度,并利用旋转编码器使异步电机与伺服电机建立联系,最终使伺服电机跟随上异步电机的速度,伺服电机正反转的速度通过台达触摸屏来设置。
基于多轴伺服驱动系统的FPGA接口电路设计
2021年3月第49卷第5期机床与液压MACHINETOOL&HYDRAULICSMar 2021Vol 49No 5DOI:10.3969/j issn 1001-3881 2021 05 015本文引用格式:贺政,彭端,龙晓斌.基于多轴伺服驱动系统的FPGA接口电路设计[J].机床与液压,2021,49(5):77-82.HEZheng,PENGDuan,LONGXiaobin.FPGAinterfacecircuitdesignbasedonmultiaxisservodrivesystem[J].MachineTool&Hydraulics,2021,49(5):77-82.收稿日期:2019-11-25基金项目:广东省科技计划资助项目(2014A010103025)作者简介:贺政(1993 ),男,硕士研究生,研究方向为多轴伺服驱动系统㊂E-mail:h_e_zheng@163.com㊂通信作者:彭端(1963 ),男,博士,教授,主要研究方向为通信VLSI及数字系统设计㊂E-mail:dpengn@126 com㊂基于多轴伺服驱动系统的FPGA接口电路设计贺政1,彭端2,龙晓斌3(1 广东工业大学信息工程学院,广东广州510006;2 广东工业大学实验教学部,广东广州510006;3 奥美森智能装备股份有限公司,广东中山528455)摘要:为了提高空调冷凝器折弯机多轴伺服驱动系统的稳定性和经济性,提出一种基于现场可编程门整列(FPGA)的多轴伺服驱动系统接口电路设计方案㊂通过FPGA实现了一种可支持8轴的脉冲多模式发送接口电路,可以适配伺服驱动器,对原有的空调冷凝器折弯机数控系统进行升级㊂采用硬件描述语言(VerilogHDL),在Quartusprim集成开发环境下,在IntelCyclone10LP的FPGA硬件平台上进行验证㊂实验结果证明,接口电路能够稳定输出,达到空调冷凝器折弯机多轴数控系统的要求㊂关键词:FPGA接口电路;数控系统;多轴伺服驱动系统;脉冲模式中图分类号:TN929 5FPGAInterfaceCircuitDesignBasedonMultiAxisServoDriveSystemHEZheng1,PENGDuan2,LONGXiaobin3(1 SchoolofInformationEngineering,GuangdongUniversityofTechnology,GuangzhouGuangdong510006,China;2 ExperimentalTeachingDepartment,GuangdongUniversityofTechnology,GuangzhouGuangdong510006,China;3 AomeisenIntelligentEquipmentCo.,Ltd.,ZhongshanGuangdong528455,China)Abstract:Inordertoimprovethestabilityandeconomyofthemultiaxisservodrivesystemforairconditioningcondenserben⁃dingmachine,aninterfacecircuitdesignschemebasedonfieldprogrammablegatearray(FPGA)wasproposedforthemultiaxisser⁃vodrivesystem.Apulsemulti⁃modetransmissioninterfacecircuitsupportingupto8axeswasimplementedbyusingFPGA.ItcouldbeusedtoadapttotheservodriverandupgradetheoriginalCNCsystemofairconditioningcondenserbendingmachine.UsingVerilogHDLlanguageandintegrateddevelopmentenvironmentofQuartusprim,theFPGAinterfacecircuitwastestedwithIntelCyclone10LP.Theexperimentalresultsshowthattheinterfacecircuitcanstablyoutput,meetingtherequirementsofmultiaxisCNCsystemofairconditioningcondenserbendingmachine.Keywords:FPGAinterfacecircuit;Numericalcontrolsystem;Multiaxisservodrivesystem;Pulsemodes0㊀前言随着生活水平的提高,人们对空调的需求量越来越大㊂空调冷凝器是空调的重要组成部分,为了满足空调冷凝器的制造工艺要求,空调冷凝器折弯机数控伺服系统是生产空调冷凝器的重要装备,高性能多轴伺服驱动系统是空调冷凝器折弯机的核心部件[1]㊂FPGA的可编程性能优越,已经成为电机控制的热门研究领域,目前在自动化数控平台中作为伺服驱动方案得到了广泛的应用㊂在FPGA中进行数字接口电路的设计,可以大大缩短研发周期,并且利用其更快的响应速度㊁更好的动态性能㊁更高的控制精度,可以设计更多可靠的电路模块[2]㊂ARM芯片是空调冷凝器折弯机常用的控制芯片,主要用于自动化控制系统的常规接口电路,能够满足正常的生产需求㊂目前ARM芯片存在接口电路研发周期长㊁资源少和且只满足单一的脉冲发送方式等问题㊂基于上述问题提出了由FPGA作为接口芯片的多轴伺服驱动系统的接口电路设计方法,并设计了3种脉冲发送模式和电路㊂1㊀系统方案空调冷凝器折弯机数控多轴伺服驱动系统包含由ARM作为核心芯片的上位机㊁伺服控制卡㊁伺服驱动器㊁伺服步进电机㊂FMC为ARM和FPGA之间的通信方式㊂FMC作为中转接口,上位机通过FMC将指令写入到存储器中(双口RAM),信号发生器根据存储器中的指令可以产生预设的脉冲,整个过程在控制卡中完成,因此伺服控制卡是整个空调冷凝器折弯机数控多轴伺服驱动系统的重要组成部分㊂其实质是利用信号发生器,发出不同类型的方波,通过控制脉冲频率来调节电机速度,通过两路信号脉冲来调节电机正反转方向,通过脉冲个数来产生位移距离㊂因此基于FPGA的伺服控制卡调节可以实现电机的精准控制效果㊂空调冷凝器折弯机数控多轴伺服驱动系统结构如图1所示㊂图1㊀多轴伺服驱动系统架构1 1㊀FMC数据接口模块ARM跟FPGA的通信接口为FMC接口,如图2所示㊂图2㊀FMC接口模块原理FMC通常被ARM芯片用来跟其RAM存储器进行通信,利用FMC通信原理,可以将FPGA挂载到ARM从属的bank区域,来进行数据交互㊂图2输入信号包含有时钟CLK㊁片选信号CS㊁读信号RD㊁写信号WR㊁地址信号addr和输入输出数据data信号以及电机反馈信号FEEDBACK,图2中数字1 8代表整个伺服系统的8个轴㊂输出信号包含有方向信号DIRECTION㊁脉冲个数PULSE_CNT㊁脉冲频率信号PULSE_FRE㊂当片选信号CS为高电平时则进行读写操作㊂当CS为高且WR为高电平则与逻辑形成,ARM开始在双口RAM中写入数据㊂脉冲发生器收到CS为高电平和RD为高电平时就会开始产生符合预期的脉冲来控制电机㊂1 2㊀伺服接口电路接口伺服控制卡和驱动器采用差分传输接口来进行连接通信㊂差分接口比单端信号更具有优势,它比单端信号更容易识别更小的信号㊂差分接口可以抗外部电磁干扰且比单端信号产生的电磁干扰更少,除此之外差分接口在单电源系统中能够从容处理双极信号㊂图3为八轴之一的伺服接口电路㊂图3㊀轴伺服接口电路2㊀FPGA设计2 1㊀信号发生器原理信号发生器采用直接数字式合成器DDS(DirectDigitalSynthesizer)原理㊂DDS信号发生器主要包含有频率控制寄存器㊁高速相位累加器和正弦计算器三大部分㊂DDS信号发生器的合成原理可得到如下公式:Fc㊃K=Fo㊃2N(1)式中:Fc为系统时钟;K为频率控制字即步进控制;Fo为想要输出的频率;N为频率计数器内存位宽㊂通过式(1)可知在公式中已知的是频率计数器内存位宽N㊁输出频率Fo㊁系统时钟Fc,只需要求㊃87㊃机床与液压第49卷出频率控制字就可以得到想要的任意频率㊂由公式(1)可得到公式(2):K=Fo㊃2NFc(2)当FPGA从ARM中得到想要输出的信号Fo,然后通过频率控制寄存器得到频率控制字K,到达下一个状态,相位累加器开始计数翻转输出脉冲信号,如图4所示㊂图4㊀脉冲信号发生器结构2 2㊀脉冲控制模块接口电路控制电机运动的核心是脉冲控制模块㊂脉冲控制模块有8个输入信号,分别为系统时钟CLK㊁运动方向(DIRECTION)㊁频率大小(F)㊁脉冲发送模式(MODE)㊁脉冲个数(T)㊁复位信号(RST)以及读(RD)写(WR)信号和一个输出信号PULSE㊂读写信号一进来则脉冲控制模块开始工作,通过方向信号(DIRECTION)来判断是正转还是反转,通过模式信号(MODE)来选择脉冲发送的方式以及通过频率大小(F)和脉冲数(T)来获得预期需要的控制信号,如图5所示㊂图5㊀脉冲控制模块接口2 3㊀脉冲模式一脉冲模式一为方向加脉冲㊂方向加脉冲是电机控制中最容易实现的脉冲方式,只需要两路通道就可以控制电机:一路为高低电平信号用来控制电机正转㊁反转,另一路则向电机输入预期的相应频率和个数的脉冲㊂因此电路结构原理设计框图如图6所示㊂图6㊀方向加脉冲设计框图图7为方向加脉冲模式的方向模块,直接由一个D触发器构成,输出方向信号(DIRECTION),名称叫做Axis1F1:Axis1F1_inst㊂脉冲模块是一个信号发生器模块,主要负责控制电机运动的频率脉冲㊂图7㊀模式一方向电路2 4㊀脉冲模式二脉冲模式二为CW(正转)加CCW(反转)脉冲㊂CW定义第一路为低电平,第二路发送脉冲时电机正转㊂CCW定义第一路发送脉冲,第二路为低电平时电机反转㊂由脉冲通道和高低电平通道的转换来达到控制电机运动的方向,从而实现对电机的精确控制㊂电路原理设计框图如图8所示㊂图8㊀电路原理设计框图CW加CCW脉冲模式,A㊁B通道功能一致,能发送高低电平和脉冲㊂图9为实现CW加CCW的功能模块㊂图9中的A和B模块都是由一个方向加脉冲模式组成,在两个方向加脉冲的基础上加入了一个选择器即可实现CW加CCW脉冲模式㊂接收到正转和反转指令即可实现高㊁低电平通道和脉冲通道的切换㊂具体实现逻辑框图如图10所示㊂㊃97㊃第5期贺政等:基于多轴伺服驱动系统的FPGA接口电路设计㊀㊀㊀图9㊀电路RTL模块图10㊀CW+CCW接口数字电路图2 5㊀脉冲模式三脉冲模式三为A+B正交脉冲输出㊂A+B正交脉冲模式没有高㊁低电平通道,A跟B通道都为脉冲发送通道,通过相位的变换来实现对电机运动方向的控制,除此之外还可以对电机进行2倍频和4倍频㊂用A通道相对B通道相位超前90ʎ或者滞后90ʎ来定义正转㊁反转㊂电路结构原理如图11所示㊂图11㊀A+B正交脉冲电路原理A+B正交脉冲接口电路结构中,A模块和B模块通过3个D触发器和3个异或逻辑实现两路通道的相位差超前或滞后90ʎ㊂A模块和B模块又都是独立的模块,要单独输入时钟㊁复位信号和方向信号以及数据信号㊂2 6㊀基于FPGA的伺服控制卡接口电路综合设计目前空调冷凝器折弯机采用单种脉冲发送模式,常用的为方向加脉冲㊂为了使数控系统能实现更高速㊁更精确和更稳定的电机控制,有必要实现3种模式任选功能㊂FPGA资源丰富且比ARM的开发更灵活,可以实现3种脉冲发送模式㊂当上位机选择好模式以后,脉冲信号控制器就可以按照该种模式去控制电机,如图12所示㊂图12㊀接口电路综合设计伺服控制卡接口综合电路通过16个D触发器和55个选择器来对3种脉冲模式进行选择和配置,从而达到3种模式任意切换且精确控制电机的效果㊂3 FPGA板级验证设计采用Intel最新系列的FPGA芯片,以及最新版的开发软件Quartusprim作为开发工具,使用Verilog硬件描述语言㊂开发平台是围绕STM32743和IntelCyclone10LP芯片的硬件平台㊂3 1㊀脉冲模式一测试将示波器的两通道探头分别接入差分接口的A㊁B通道㊂图13为方向加脉冲的实际效果,方向A通道,脉冲B通道㊂图13(a)中方向为低电平,与此同时㊃08㊃机床与液压第49卷B通道发送出了一定频率㊁一定脉冲数的方波脉冲,这时电机反转㊂图13(b)中A通道由低电平转为高电平则电机由反转变为正转,B为有一定频率和一定脉冲数的脉冲㊂实验结果表明接口电路设计达到了预期的效果㊂在IntelCyclone10LP上设计的脉冲模式一资源消耗如表1所示㊂图13㊀脉冲模式一输出信号表1㊀脉冲模式一资源消耗资源占比/%LUT1FF1I/O30BUFG13 2㊀脉冲模式二测试图14为CW加CCW的示波器实测结果㊂图14㊀脉冲模式二输出信号A通道为低电平时B通道发出具有一定频率和脉冲个数的脉冲控制信号,电机以一定的速度正转一段距离㊂当A通道发出具有一定频率和脉冲个数的脉冲控制信号时,B通道为低电平,此时电机以一定速度反转一段距离㊂实验结果表明脉冲模式二的接口电路设计达到预期效果㊂在IntelCyclone10LP上设计的脉冲模式二资源消耗如表2所示㊂表2㊀脉冲模式二接口电路资源消耗资源占比/%LUT8FF5I/O30BUFG23 3㊀脉冲模式三测试A+B正交脉冲的输出和第一㊁第二模式很相似,只需要对A㊁B两通道作一些相位控制,主要是A㊁B两通道相位呈90ʎ的超前和滞后㊂图15分别展示了正转和反转的实测效果㊂图15㊀脉冲模式三效果图15是A+B正交脉冲示波器实验结果,有A相通道和B相通道㊂当A相信号超前B相信号90ʎ时则电机以一定速度正转一段距离㊂图15(b)为A相信号滞后B相信号90ʎ,电机以一定速度反转一段距离㊂在IntelCyclone10LP上设计的脉冲模式三资源消耗如表3所示㊂表3㊀脉冲模式三资源消耗资源占比/%LUT10FF6I/O30BUFG44㊀结论根据空调冷凝器折弯机自动化数控伺服驱动系统的关键技术,提出了基于多轴伺服驱动系统的FPGA接口电路㊂该电路可实现3种模式脉冲,进行了FPGA板级验证,满足多轴伺服驱动系统升级需求,对空调冷凝器折弯机的性能提升具有重要意义㊂参考文献:[1]黄玉平,仲悦,郑再平.基于FPGA的伺服系统数字控制技术[M].北京:中国电力出版社,2015:293-306.[2]李俊杰.多轴系统高精度同步控制[D].西安:西安电子科技大学,2012:2.LIJJ.Highprecisionsynchronizationcontrolformulti⁃axissystems[D].Xi an:XidianUniversity,2012:2.[3]张从鹏,刘同,赵康康.基于DSC和FPGA的运动控制卡设计[J].机床与液压,2016,44(2):156-158.ZHANGCP,LIUT,ZHAOKK.Designofmotioncontrol⁃lerbasedonDSCandFPGA[J].MachineTool&Hydrau⁃lics,2016,44(2):156-158.[4]王涛,王扶林.基于DSP+CPLD+FPGA的运动控制卡的设计[J].机械制造,2009,47(9):39-41.WANGT,WANGFL.DesignofmotioncontrolcardbasedonDSP+CPLD+FPGA[J].Machinery,2009,47(9):39-41.[5]赖晓丰,刘敬猛,顾天宇,等.基于PC和FPGA的运动控制系统[J].电子技术应用,2011,37(4):130-132.LAIXF,LIUJM,GUTY,etal.Motioncontrolsystem㊃18㊃第5期贺政等:基于多轴伺服驱动系统的FPGA接口电路设计㊀㊀㊀basedonPCandFPGA[J].ApplicationofElectronicTech⁃nique,2011,37(4):130-132.[6]GUOJX,XUEWC,HUT.ActivedisturbancerejectioncontrolforPMLMservosysteminCNCmachining[J].JournalofSystemsScienceandComplexity,2016,29(1):74-98.[7]JEONJW.AGeneralizedapproachfortheaccelerationanddecelerationofCNCmachinetools[C]//Proceedingofthe1996IEEEIECON22ndInternationalConferenceonIn⁃dustrialElectronics,ControlandInstrumentation.Taiwan:IEEE,1996:1283-1288.[8]WENQG,LIANGYC,ADRIANOT,etal.AnoveliterativevelocitycontrolalgorithmanditsFPGAimplementationbasedontrigonometricfunction[J].ChineseJournalofElectronics,2019,28(2):237-245.[9]戴世界.多轴精密数控系统的研究[D].厦门:厦门大学,2009.DAISJ.StudyonmultiaxialandprecisionNCsystem[D].Xiamen:XiamenUniversity,2009.[10]黄海滨.多轴运动控制接口电路设计及其在FPGA中的实现[D].大连:大连理工大学,2017.HUANGHB.Multi⁃axismotioncontrolinterfacecircuitdesignisimplementedinFPGA[D].Dalian:DalianUni⁃versityofTechnology,2017.[11]钱志恒,周亚军.基于DSP和FPGA的运动控制器[J].机电工程,2009,26(1):38-41.QIANZH,ZHOUYJ.MotioncontrollerbasedonDSPandFPGA[J].Mechanical&ElectricalEngineeringMag⁃azine,2009,26(1):38-41.[12]刘岩,丁大伟.基于DSP-FPGA的多轴运动控制系统设计[J].制造业自动化,2012,34(7):23-26.LIUY,DINGDW.Designofmulti⁃axismotioncontrolsystembasedonDSP-FPGA[J].ManufacturingAutoma⁃tion,2012,34(7):23-26.[13]杨启杰.驱控一体化多轴机器人运动控制系统的研究与开发[D].上海:上海交通大学,2017.YANGQJ.Researchanddevelopmentofintegratedservo⁃and⁃controlsystemformulti⁃axisrobot[D].Shanghai:ShanghaiJiaoTongUniversity,2017.[14]史俊波.基于FPGA的可编程运动控制器的设计与实现[D].武汉:华中科技大学,2016.SHIJB.Thedesignsndimplementationoftheprogramma⁃blemotioncontrollerbasedonFPGA[D].Wuhan:Hua⁃zhongUniversityofScienceandTechnology,2016.[15]王小娟,杨玲玲.基于PMAC的五轴数控铣床系统设计[J].山西农业大学学报(自然科学版),2009,29(6):513-516.WANGXJ,YANGLL.Designoffive⁃axisNCmillingmachinesystembasedonPMAC[J].JournalofShanxiAgriculturalUniversity(NaturalScienceEdition),2009,29(6):513-516.(责任编辑:张艳君)(上接第134页)[2]SAMUELPD,PINESDJ.Vibrationseparationmethodologyforplanetarygearhealthmonitoring[C]//Proceedingsof7thAnnualInternationalSymposiumonSmartStructuresandMaterials.NewportBeach:SPI,2000.[3]ZHANGLN,WANGY,WUK,etal.Dynamicmodelingandvibrationcharacteristicsofatwo⁃stageclosed⁃formplanetarygeartrain[J].MechanismandMachineTheory,2016,97:12-28.[4]ERICSONTM,PARKERRG.Experimentalmeasurementoftheeffectsoftorqueonthedynamicbehaviorandsystemparametersofplanetarygears[J].MechanismandMachineTheory,2014,74:370-389.[5]雷亚国,汤伟,孔德同,等.基于传动机理分析的行星齿轮箱振动信号仿真及其故障诊断[J].机械工程学报,2014,50(17):61-68.LEIYG,TANGW,KONGDT,etal.Vibrationsignalsim⁃ulationandfaultdiagnosisofplanetarygearboxesbasedontransmissionmechanismanalysis[J].JournalofMechanicalEngineering,2014,50(17):61-68.[6]杨锐,姜宏,章翔峰,等.含太阳轮缺齿故障的行星齿轮传动系统动态特性研究[J].组合机床与自动化加工技术,2018(7):78-81.YANGR,JIANGH,ZHANGXF,etal.Studyondynamiccharacteristicsofplanetarygeartransmissionsystemwithmissingteethfaultinthesungear[J].ModularMachineTool&AutomaticManufacturingTechnique,2018(7):78-81.[7]周建星,孙文磊,曹莉,等.行星齿轮传动系统碰撞振动特性研究[J].西安交通大学学报,2016,50(3):16-21.ZHOUJX,SUNWL,CAOL,etal.Vibro⁃impactcharac⁃teristicsofplanetarygeartransmission[J].JournalofXi anJiaotongUniversity,2016,50(3):16-21.[8]杨锐,周建星,姜宏,等.行星齿轮传动系统断齿故障下动态特性研究[J].机械传动,2018,42(11):33-39.YANGR,ZHOUJX,JIANGH,etal.Studyonthedynamiccharacteristicofplanetarygeartransmissionsystemwithtooth⁃breaking[J].JournalofMechanicalTransmission,2018,42(11):33-39.[9]周建星,刘更,吴立言.含弹性支撑的船用减速器箱体动态特性[J].哈尔滨工业大学学报,2012,44(7):97-101.ZHOUJX,LIUG,WULY.Vibrationanalysisofmarineplanetaryreducerwithelasticsupport[J].JournalofHarbinInstituteofTechnology,2012,44(7):97-101.(责任编辑:张楠)㊃28㊃机床与液压第49卷。
测试转台伺服系统方案
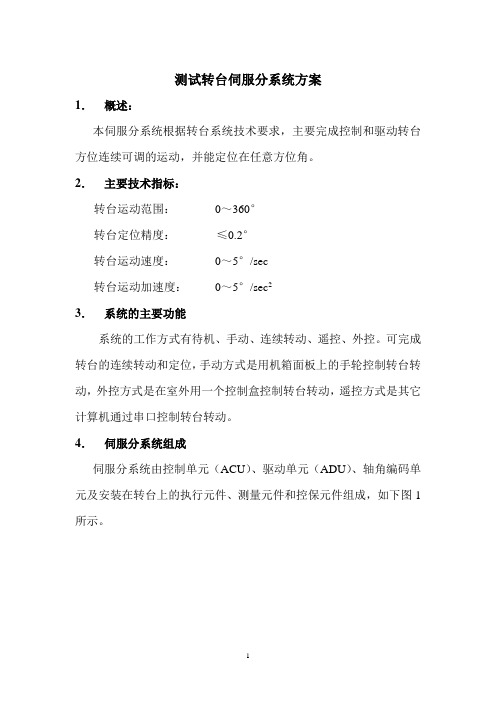
测试转台伺服分系统方案1.概述:本伺服分系统根据转台系统技术要求,主要完成控制和驱动转台方位连续可调的运动,并能定位在任意方位角。
2.主要技术指标:转台运动范围:0~360°转台定位精度:≤0.2°转台运动速度:0~5°/sec转台运动加速度:0~5°/sec23.系统的主要功能系统的工作方式有待机、手动、连续转动、遥控、外控。
可完成转台的连续转动和定位,手动方式是用机箱面板上的手轮控制转台转动,外控方式是在室外用一个控制盒控制转台转动,遥控方式是其它计算机通过串口控制转台转动。
4.伺服分系统组成伺服分系统由控制单元(ACU)、驱动单元(ADU)、轴角编码单元及安装在转台上的执行元件、测量元件和控保元件组成,如下图1所示。
图1 伺服分系统组成框图伺服分系统可作成一个4U的全密闭机箱。
机箱面板上有操作开关、方位角度显示等。
控制单元ACU是转台控制中心。
它完成转台运动的各种控制,各种控制策略的实时实施。
轴角编码器单元将自整角同步机测到的转台转轴的角度转化为数字量,用于转台的位置显示和位置控制。
驱动单元(ADU)由功率放大、环路控制等组成,主要完成对转台转轴的执行电机进行驱动。
转台转轴的执行电机采用交流伺服电机,因其无电刷磨损问题,可靠性高,寿命长,免维护。
4.1 控制单元控制单元是以单片机为基础,集控制、监视、计算、通讯于一体,对转台实现安全可靠的操控的控制器,它与终端的通讯采用串口通讯。
根据不同的工作方式,ACU产生相应的控制信号,通过驱动单元驱动转台运动,从而使转台转向指定角度。
ACU是操作人员进行操作的中心,具有丰富而简洁的显示和友好的操控界面。
ACU的主要工作方式为:待机,手动,连续转动,遥控,外控等。
4.2 轴角编码器轴角的测量元件采用自整角同步机,这种角度敏感元件较之光电码盘有更高的可靠性和高低温适应能力。
轴角编码器的核心芯片采用大规模集成专用芯片RDC。
数控车床伺服进给系统结构设计毕业论文

摘要数控机床作为机电一体化的典型产品,在机械制造业中发挥着巨大的作用,很好的解决了现代机械制造中结构复杂,精密,批量小,多变零件的加工问题,且能稳定产品的加工质量,大幅度提高生产效率。
本论文主要对数控机床伺服进给系统的机械部分这一课题进行探讨,文中详细描述了数控机床伺服进给系统的设计方法,包括传动系统总体设计,滚珠丝杠副的选择,伺服电动机的选择,精度和刚度验算。
同时运用软件Solidworks做出伺服进给系统的零部件,以及将各个零部件进行装配,二维工程图出图。
关键词:数控机床;伺服电动机;伺服进给系统;滚珠丝杠副AbstractNC machine tools as typical electromechanical products, plays an enormous role in machinery manufacturing, it solutes the problems of modern machinery manufacturing complex, precision, small batches,changeable parts processing, also it can be able to stable quality of products, increase productivity greatly. In this paper, it mainly explore to the topic of mechanical parts of NC machine tools’ servo feed system, This article describes the designing method of the NC machine tools’ servo feed system , including designing the transmission system, choosing Ball Screws, servo motor, checking the accuracy and rigidity. Make out parts of NC machine tools’ servo feed system and assemble the parts with solidworks. Export 2D engineering drawing and make the animations of feed system, produce three-dimensional cutaway views of Ball Screws and Rolling Guides.Key word: NC machine;Servo motor; Servo feed system; Ball Screws目录摘要 (I)Abstract (II)1 绪论 (1)1.1 数控机床的概念 (1)1.2 数控机床的组成分类及特点 (1)1.2.1 数控机床的组成 (1)1.2.2 数控机床的分类 (1)1.2.3 数控机床的特点 (2)1.3 数控系统的发展简史及国外发展现状 (2)1.4 我国数控系统的发展现状及趋势 (3)1.4.1 数控技术状况 (3)1.4.2 数控系统的发展趋势 (4)1.5 伺服系统的特点 (4)1.6 本课题的研究内容和方法 (6)1.7 本章小结 (7)2 进给系统的总体方案设计 (7)2.1 机床的主要性能 (8)2.2 进给系统的精度要求 (8)2.3 进给传动控制伺服系统的选择 (8)2.4 进给系统的传动要求及传动类型的选择 (9)2.4.1 进给系统的传动要求 (9)2.4.2 传动类型的选择 (9)2.5 电机与丝杠联接方式的选择 (10)2.6 进给传动方案设计 (11)3 数控车床伺服进给系统X轴选型 (12)3.1 滚珠丝杆机构的计算选型 (13)3.1.2 精度等级选定 (14)3.1.3 导程的计算和选定 (15)3.1.4 丝杆支承方式选定 (15)3.1.5 丝杆外径选定及校核 (15)3.1.6 计算最大轴向载荷 (16)3.1.7 轴向允许载荷计算 (16)3.1.8 丝杠允许转速计算及校核 (17)3.1.9 寿命计算及校核 (19)3.2 电机的选型 (19)3.2.1 转速的计算 (19)3.2.2 驱动扭矩计算 (20)3.2.3 计算角加速度 (21)3.2.4 电机所需的加速扭矩 (21)3.2.5 计算各种运动状态下点检所需要的驱动扭矩 (21)3.2.6 电机转动惯量要求 (22)3.3 滚珠丝杠副的支承的设计 (22)3.4 同步齿轮带传动的设计 (24)3.5 导轨的选择 (25)4 数控车床伺服进给系统Z轴选型 (26)4.1 滚珠丝杆机构的计算选型 (26)4.1.1载荷的确定 (27)4.1.2 精度等级选定 (27)4.1.3 导程的计算和选定 (28)4.1.4 丝杆支承方式选定 (29)4.1.5 丝杆外径选定及校核 (29)4.1.6 计算最大轴向载荷 (29)4.1.7 轴向允许载荷计算 (30)4.1.8 丝杠允许转速计算及校核 (31)4.1.9 寿命计算及校核 (33)4.2 电机的选型 (33)4.2.1 转速的计算 (33)4.2.2 驱动扭矩计算 (34)4.2.3 计算角加速度 (35)4.2.4 电机所需的加速扭矩 (35)4.2.5 计算各种运动状态下点检所需要的驱动扭矩 (35)4.2.6 电机转动惯量要求 (36)4.3 滚珠丝杠副的支承的设计 (37)4.4 联轴器传动的设计 (39)4.5 导轨的选择 (39)5 伺服进给系统的结构设计 (40)5.1 solidworks实体设计的特征功能及其在本次设计中的应用405.2 伺服进给系统主要零件的设计及装配 (41)5.2.1 导轨的设计 (41)5.2.2 Z轴丝杠螺母的设计 (45)5.2.3 添加轴承 (46)5.2.4 添加紧固件 (46)5.2.5 X轴滑块的设计 (47)5.2.6 丝杠的设计 (47)5.3 伺服进给系统零件的装配 (48)5.4 伺服进给系统的装配图 (49)结论 (51)致谢 (52)参考文献 (53)附录A (54)附录B (69)1 绪论1.1 数控机床的概念数控机床是综合应用计算机、自动控制、自动检测及精密机械等高新技术的产物,是技术密集度及自动化程度很高的典型机电一体化加工设备。
行业高精度伺服控制系统方案范本1

行业高精度伺服控制系统方案第1章项目背景与需求分析 (3)1.1 行业概述 (3)1.2 高精度伺服控制系统在行业的重要性 (3)1.3 项目需求分析 (4)第2章伺服控制系统技术概述 (4)2.1 伺服控制技术发展历程 (4)2.1.1 电气伺服控制技术的初期阶段 (4)2.1.2 数字化伺服控制技术 (5)2.1.3 现代伺服控制技术 (5)2.2 伺服控制系统的基本原理 (5)2.2.1 控制器 (5)2.2.2 驱动器 (5)2.2.3 执行机构 (5)2.2.4 反馈环节 (5)2.3 伺服控制系统的关键技术 (5)2.3.1 传感器技术 (6)2.3.2 驱动器技术 (6)2.3.3 控制算法 (6)2.3.4 伺服系统集成与优化 (6)第3章高精度伺服电机选型与设计 (6)3.1 伺服电机类型及特点 (6)3.2 高精度伺服电机的选型原则 (6)3.3 伺服电机的结构设计 (7)第4章伺服驱动器设计与实现 (7)4.1 伺服驱动器概述 (8)4.2 伺服驱动器硬件设计 (8)4.2.1 电路设计 (8)4.2.2 元件选型 (8)4.2.3 接口设计 (8)4.3 伺服驱动器软件设计 (8)4.3.1 控制算法 (8)4.3.2 软件架构 (8)4.3.3 程序编写与调试 (8)4.3.4 系统优化与测试 (9)第5章位置控制系统设计 (9)5.1 位置控制原理 (9)5.1.1 控制系统模型 (9)5.1.2 位置传感器 (9)5.2 位置控制器设计 (9)5.2.1 控制器结构 (9)5.2.2 PID参数整定 (9)5.3.1 控制算法选择 (10)5.3.2 算法实现 (10)5.3.3 系统调试与优化 (10)第6章速度控制系统设计 (10)6.1 速度控制原理 (10)6.1.1 速度闭环控制 (10)6.1.2 速度反馈 (11)6.2 速度控制器设计 (11)6.2.1 控制器选型 (11)6.2.2 控制器参数整定 (11)6.3 速度控制算法实现 (11)6.3.1 PID控制算法 (11)6.3.2 速度控制算法实现步骤 (11)6.3.3 算法优化 (11)第7章伺服系统功能优化 (12)7.1 伺服系统参数整定 (12)7.1.1 参数整定的必要性 (12)7.1.2 参数整定方法 (12)7.2 模糊控制策略在伺服系统中的应用 (12)7.2.1 模糊控制原理 (12)7.2.2 模糊控制器设计 (12)7.2.3 模糊控制在伺服系统中的应用实例 (12)7.3 神经网络控制策略在伺服系统中的应用 (12)7.3.1 神经网络控制原理 (12)7.3.2 神经网络控制器设计 (13)7.3.3 神经网络控制在伺服系统中的应用实例 (13)第8章伺服控制系统集成与调试 (13)8.1 伺服控制系统集成 (13)8.1.1 系统组成 (13)8.1.2 集成步骤 (13)8.1.3 注意事项 (13)8.2 伺服控制系统调试方法 (13)8.2.1 调试流程 (14)8.2.2 调试工具与仪器 (14)8.3 调试过程中的常见问题及解决方法 (14)8.3.1 电机运行不稳定 (14)8.3.2 电机发热严重 (14)8.3.3 位置控制精度差 (14)8.3.4 系统响应速度慢 (14)8.3.5 系统噪音大 (14)第9章伺服控制系统可靠性分析 (14)9.1 伺服系统可靠性概述 (14)9.2 伺服系统故障分析 (15)9.2.2 故障原因 (15)9.3 伺服系统可靠性提升策略 (15)9.3.1 设计优化 (15)9.3.2 制造与装配 (15)9.3.3 运行与维护 (15)第10章伺服控制系统应用案例分析 (16)10.1 工业伺服控制系统应用案例 (16)10.1.1 案例背景 (16)10.1.2 系统方案 (16)10.1.3 应用效果 (16)10.2 服务伺服控制系统应用案例 (16)10.2.1 案例背景 (16)10.2.2 系统方案 (16)10.2.3 应用效果 (16)10.3 特种伺服控制系统应用案例 (16)10.3.1 案例背景 (17)10.3.2 系统方案 (17)10.3.3 应用效果 (17)第1章项目背景与需求分析1.1 行业概述我国经济的持续发展和科技进步,行业在我国得到了广泛关注和迅速发展。
伺服驱动系统设计方案

伺服驱动系统设计方案伺服电机的原理:伺服的基本概念是准确、精确、快速定位。
与普通电机一样,交流伺服电机也由立子和转子构成。
泄子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90。
电角度。
伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决左于编码器的精度{线数)。
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输岀。
其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机^可使控制速度,位巻精度非常准确。
交流伺服电机的工作原理和单相感应电动机无本质上的差异。
但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。
而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,苴转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率SO>1.这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当左子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
图3伺服电动机的转矩特性2>运行范围较宽如图3所示,较差率S在0到1的范用内伺服电动机都能稳泄运转。
3.无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,左子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)如图4所示,与普通的单相异步电动机的转矩特性(图中r-s曲线)不同。
机电一体化系统设计第4章伺服系统设计1

常用的是前面2种调速方式。
晶闸管的结构与符号
晶闸管是具有三个PN 结的四层结构, 其外形、 结构及符号如图。
四
层
A
半
导
体
G
K
(a) 符号
A 阳极
三
二、步进电动机及其控制
1、工作原理:
当第一个脉冲通入A相时,磁通企图沿着磁阻最小的 路径闭合,在此磁场力的作用下,转子的1、3齿要和A 级对齐。当下一个脉冲通入B相时,磁通同样要按磁阻最 小的路径闭合,即2、4齿要和B级对齐,则转子就顺逆 时针方向转动一定的角度。
三、步进电动机及其控制
若通电脉冲的次序为A、C、B、A…,则不 难推出,转子将以顺时针方向一步步地旋转。这 样,用不同的脉冲通入次序方式就可以实观对步 进电动机的控制。
B
W 2 sin
W
2
由于θ值很小,条纹近似与栅线的方向 垂直,故称为横向莫尔条纹。
横向莫尔条纹重要特性: ①莫尔条纹运动与光栅运动具有对应关系 ②莫尔条纹具有位移放大作用 ③莫尔条纹具有平均光栅误差作用
原理图1
退出
4.2 伺服系统执行元件及其控制
一、执行元件类型及特点 二、步进电机及其控制 三、伺服电机及其控制
(1) 原理: 励磁绕组WF接到电压为的交流电网上,控制
绕组接到控制电压上,当有控制信号输入时,两 相绕组便产生旋转磁场。该磁场与转子中的感应 电流相互作用产生转矩,使转子跟着旋转磁场以 一定的转差率转动起来,其旋转速度为
n 6f( 0 1 s )p n 0 ( 1 s )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服驱动系统设计方案伺服电机的原理:伺服的基本概念是准确、精确、快速定位。
与普通电机一样,交流伺服电机也由定子和转子构成。
定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。
伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度{线数)。
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。
交流伺服电机的工作原理和单相感应电动机无本质上的差异。
但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。
而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
图3 伺服电动机的转矩特性2、运行范围较宽如图3所示,较差率S在0到1的范围内伺服电动机都能稳定运转。
3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)如图4所示,与普通的单相异步电动机的转矩特性(图中T′-S曲线)不同。
这时的合成转矩T 是制动转矩,从而使电动机迅速停止运转。
图4 伺服电动机单相运行时的转矩特性图5是伺服电动机单相运行时的机械特性曲线。
负载一定时,控制电压Uc愈高,转速也愈高,在控制电压一定时,负载增加,转速下降。
图5 伺服电动机的机械特性交流伺服电动机的输出功率一般是0.1-100W。
当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。
交流伺服电动机运行平稳、噪音小。
但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于0.5-100W 的小功率控制系统。
***机器手伺服控制系统设计分析变频与伺服的关系:目前市场上变频控制器的用途要大大的大于伺服机构,有必要搞清伺服和变频两个系统之间的关系,以便提高可参考设计的途径,这样才能以最低的成本达到设计出自己的伺服控制的目的。
简单的说:变频只是伺服的一个部分,伺服是在变频的基础上进行闭环的精确控制从而达到更理想的效果。
我们的目标和步骤要在变频系统的基础上,首先解决电机的驱动问题,达到调速目的,然后加入对反馈的采样,设计自己的PID算法,最终完成闭环控制。
当然,这种系统的设计是有难度的,因为简单的看如果系统完成仅仅做一个单独的伺服电机的控制系统就已经能有一定的市场,如果系统简单的话,伺服系统的价格应该不是现在的价位!所以正确的分析系统难度是保证系统的正确完成的基础。
首先控制部分的算法是各厂家保密的技术环节,如果仅仅使用传统的调节电容移相的控制方式不适合于高精度定位控制的需要。
那么我们必然要选择AC-DC-AC的过程,这中间的DC-AC的三相逆变技术是必须要攻克的。
如果简单的PWM电机调速使用通常的技术手段可以实现,但是相对高频的(400HZ)三相逆变需要系统处理要有很高的速度。
其次DSP技术的应用需要比较高的理论基础,这对我们是一种挑战,合理的算法和处理机制是实现最终控制的必然途径,要克服理论上的差距,必要的学习和钻研过程是不可避免的。
这中间和熟悉的技术开发产品的差异是时间的损耗!PID的控制算法是销售伺服控制系统公司的技术命脉,PID算法的好坏直接决定下一步机械手系统的运转的平稳和系统精度的保证。
对任何公司来说,设计专用的PID 算法都是公司技术含量最高的部分。
这部分包含自动控制算法、错误的处理和动作判断以及控制方式的选择。
伺服电机的选择:目前定型为松下400HZ36V三相交流伺服电机?(原因)伺服电机的驱动原理:交流伺服的技术本身就是借鉴并应用了变频的技术,在直流电机的伺服控制的基础上通过变频的PWM方式模仿直流电机的控制方式来实现的,也就是说交流伺服电机必然有变频的这一环节:变频就是将工频的50、60HZ的交流电先整流成直流电,然后通过可控制门极的各类晶体管(IGBT,IGCT等)通过载波频率和PWM调节逆变为频率可调的波形类似于正余弦的脉动电,由于频率可调,所以交流电机的速度就可调了(n=60f/2p ,n转速,f频率,p极对数)。
交流伺服系统根据其处理信号的方式不同,可以分为模拟式伺服、数字模拟混合式伺服和全数字式伺服;如果按照使用的伺服电动机的种类不同,又可分为两种:一种是用永磁同步伺服电动机构成的伺服系统,包括方波永磁同步电动机(无刷直流机)伺服系统和正弦波永磁同步电动机伺服系统;另一种是用鼠笼型异步电动机构成的伺服系统。
二者的不同之处在于永磁同步电动机伺服系统中需要采用磁极位置传感器而感应电动机伺服系统中含有滑差频率计算部分。
若采用微处理器软件实现伺服控制,可以使永磁同步伺服电动机和鼠笼型异步伺服电动机使用同一套伺服放大器。
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。
可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
交流伺服电动机有以下三种转速控制方式:◆幅值控制控制电流与励磁电流的相位差保持90°不变,改变控制电压的大小。
◆相位控制控制电压与励磁电压的大小,保持额定值不变,改变控制电压的相位。
◆幅值—相位控制同时改变控制电压幅值和相位。
交流伺服电动机转轴的转向随控制电压相位的反相而改变。
一般伺服电机驱动系统框图伺服电机控制部分框图系统的设计步骤:(1)制定控制方案的技术路线,确定驱动电机转动的控制电路:a)首先确认使用DSP的厂家型号;b)找出使用该信号控制器驱动伺服电机的模型;(最好可以演示)c)绘制控制部分原理图和PCB图通过试验手段,试验各种控制模式下电机的运转;d)封装硬件及软件模块;(2)本阶段总结上一阶段的试验成果,吸收并进一步测试各种控制的适用范围,制定电机控制模块的通讯协议、控制模式和PID控制的指导方案:a)测试反馈信号和处理速度之间的匹配;b)封装模块的适用范围测试;c)论证机械手系统适用的伺服电机控制方式;d)确认系统整体功能需求。
(3)整体系统方案确认阶段:a)机械手综合控制单元的功能确认;b)人机界面:按键和显示单元的模块试验;c)通讯方式的测试和联机调试;d)逐次增加电机的数量,测试电机的协调性动作和模块封装;e)电路安装的结构方案设计。
(4)综合设计阶段:a)全部硬件的综合性能调试;b)不同控制模式和不同动作下,细致动作的准确性测试;c)复杂动作的压力测试和快速反应的数据流量测试;d)整体功耗测试和烤机测试。
(5)联机调试阶段:a)脱机操作的各种动作的稳定性测试;b)待机状态的EMC测试和硬件电路的抗干扰设计验证;c)联机状态下的综合动作测试及到位反馈;d)模拟实际现场的烤机测试。
第一阶段所涉及到技术细节及难点分析如上图首先要通过数学手段,模拟出三相逆变的交流400HZ控制电源;数学模型和6路3对上下臂的PWM输出方式是这一阶段的两个难点。
上图为三相逆变电路的原理图,但是根据此原理图对功率模块的测试和对称性选择会严重的阻碍项目的进度。
根据,目前掌握的情况,建议我们直接选择IPM模块。
下图为IPM模块的功能图。
根据前期进度要求,同时建议使用单电源的IPM模块。
图1 hvic内部结构示意图图2 单电源ipm 内部电路附录:伺服马达编码器工作原理。