Approximate Orientation Steerability Based on Angular Gaussians
Approximating and Intersecting Surfaces from Points

Eurographics Symposium on Geometry Processing(2003)L.Kobbelt,P.Schröder,H.Hoppe(Editors)Approximating and Intersecting Surfaces from PointsAnders Adamson and Marc AlexaDepartment of Computer Science,Darmstadt University of Technology,Germany AbstractPoint sets become an increasingly popular shape representation.Most shape processing and rendering tasks re-quire the approximation of a continuous surface from the point data.We present a surface approximation that is motivated by an efficient iterative ray intersection computation.On each point on a ray,a local normal direction is estimated as the direction of smallest weighted co-variances of the points.The normal direction is used to builda local polynomial approximation to the surface,which is then intersected with the ray.The distance to the poly-nomials essentially defines a distancefield,whose zero-set is computed by repeated ray intersection.Requiring the distancefield to be smooth leads to an intuitive and natural sampling criterion,namely,that normals derived from the weighted co-variances are well defined in a tubular neighborhood of the surface.For certain,well-chosen weight functions we can show that well-sampled surfaces lead to smooth distancefields with non-zero gradients and,thus,the surface is a continuously differentiable manifold.We detail spatial data structures and efficient algorithms to compute ray-surface intersections for fast ray casting and ray tracing of the surface.Categories and Subject Descriptors(according to ACM CCS):G.1.2[Numerical Analysis]:Approximation of sur-faces and contours I.3.5[Computer Graphics]:Curve,surface,solid,and object representations I.3.7[Computer Graphics]:Ray Tracing1.IntroductionPoints samples without additional topological information gain popularity as a shape representation.On one hand, many shapes are nowadays created using sampling3341, where the sampling process provides only partial connectiv-ity information.On the other hand,points are a reasonable display primitive for shapes with high geometric or textural complexity relative to the rastered image38422849.Since ac-quisition and rendering are point-based,it seems logical to stay within the framework of point-based shape representa-tion also during the modeling stage of shapes224837. Modeling or processing shapes,however,requires to in-terrogate the surface.For point representation this typically means to attach a continuous surface approximation to the points.Approximation of surfaces(and not just functions over a Euclidean domain)from irregularly spaced points is still a fairly young topic,where many approaches are rather aadamson@rmatik.tu-darmstadt.dealexa@informatik.tu-darmstadt.de practical and provide no guarantee that the reconstructed sur-face is,for example,continuous,manifold,or resembles the topology of the sampled surface.Interestingly,only few at-tempts have been made to give a criterion for sufficient sam-pling of a surface–a notable exception is the line of work initiated by Amenta and co-workers457Here we present a scheme for the approximation of smooth surfaces from ir-regularly sampled points that also allows formulating a sam-pling criterion,however,not yet as concise as Amenta’s. Our approach resembles a ray tracing technique1for Point Set Surfaces3223,a surface approximation that uses a non-linear projection operation to define the surface as the sta-tionary points of the projection.It has been conjectured that the projection operation gives rise to a continuous manifold reconstruction.In an attempt to speed up the ray intersec-tion computation,we have replaced the non-linear projection during ray intersection with a simpler method.We found that the surface that is implicitly defined by this operation has,in fact,comparable properties–only they are easier to prove. The requirements for the reconstruction being a continuous manifold lead to a natural and intuitive sampling criterion.c The Eurographics Association2003.After establishing some context by briefly discussing re-lated work(Section2),wefirst provide the theory using a slightly less general version of our surface definition(Sec-tion3)and then explain the iterative procedure(Section4) and spatial data structures(Section5).2.Related WorkWe concentrate on work that is directly related to our ap-proach,namely,the approximation of a surface from point samples and interrogating this surface by means of fast ray-surface intersections.Most approximation techniques define the surface implic-itly,either by defining a scalar function of space or by certain constructive means.An interesting line of approximation algorithms define the surface as a subgraph of the Delaunay complex of the points1217.Many algorithms follow this spirit and differ mostly in how they identify triangles that belong to the sur-face.Crust457uses vertices of the V oronoi diagram as an approximation to the medial axis.The Delaunay triangula-tion including these vertices connects points on the surface either to the medial axis or to natural neighbors,which al-lows identifying surface triangles.The connection to the me-dial axis leads naturally to a minimal sampling density that is linear in the proximity of the surface to the medial axis. Sufficient sampling guarantees a reconstruction of the origi-nal topology.Cocone61415has similar guarantees but elim-inates the step of adding V oronoi vertices to the point set. This makes the Delaunay-complex significantly smaller and, thus,the reconstruction faster.Still,constructing the Delau-nay complex of millions of points is costly and some algo-rithm rather use local triangulations of the points1120 Hoppe et al.25defines an implicit function that is interest-ingly in a sense dual to Delaunay-type reconstruction:For each point a normal direction is estimated from neighboring points and all normals are oriented consistently.The signed distance to the surface is defined as the normal component of the distance to the closest point.Thus,the surface consists of planes through the points bounded by the V oronoi cells of the points.In many practical cases one has multiple point samples for the same region.A way to consolidate this information is to build a distance function in a volumetric grid by properly weighting the points1347.Defining the surface as a set of planar pieces results in C0 approximations.To achieve smoother approximations one could either build a smooth surface over the triangulation24 orfit smoother functions.A global and smooth interpolant for scattered data can be constructed using radial basis func-tions(RBF).For surface approximation an implicit function is computed using extra points away from the surface4345. The computation traditionally involves the solution of a large linear system,however,is nowadays tackled using com-pactly supported functions46,mulitpole expansions8109, thinning18192616,or hierachical clustering2736.Another approch is tofit globally smooth functions locally21,or to perform purely localfits3930and blend these local surface approximations together35.The moving least squares(MLS)31approximation takes this approach to the extreme by building a localfit for every point on the ing MLS allows defining a projection operation that defines the surface implicitly as its stationary points32. The projection operation could be used for resampling the surface23.Our surface definition results from simplifying a ray intersection procedure1for this type of surface.For modeling and rendering a surface has to be interro-gated.While for rendering one could use the the existing points38422849,modeling typically requires operations such as ray-surface intersection,for example,to specify points on the surface by clicking.For a variety of deformation and CSG operations the MLS projection operator could be used37.Computing ray-surface intersections for an implicit sur-face is conceptually simple:The ray is substituted in the im-plicit surface defiputing the intersection is,thus, equivalent tofinding a root of a function in one unknown. To speed up the intersection computation one should ex-ploit properties of the implicit function.A common way is to compute a(local)Lipschitz constant,which yields a con-servative step width2923.Another approach is to use interval analysis34.Schaufler and Jensen define a ray-surface intersection for point sets directly,without an intermediate surface definition44.They collect points within a cylinder around the ray and compute a weighted average surface location.This is very fast,however,the geometry resulting from ray surface intersection depends on the particular rays used for intersect-ing the surface.3.Foundations–Simple Surface Definition andSampling CriterionWe assume that a set of points implicitly defines a smooth manifold surface.More specifically,let points p i3i 1N,be sampled from a surface S(possibly with ameasurement noise).The general idea of our surface def-inition is inspired by MLS approximation–the surface is approximated by building local polynomial approximations everywhere in space and a point s in space belongs to the surface if its local polynomial approximation contains s.For reasons of clarity wefirst describe a slightly simplified ver-sion of the definition.We feel this makes the connection to the sampling criterion and the resulting properties easier to establish.The more general surface definition is given later together with an algorithm that computes ray surface inter-sections.c The Eurographics Association2003.The main tools for the definition of the surface are weighted averages and weighted co-variances of the points in a tubular neighborhood around the surface.A weight func-tionθ:specifies the influence of a point p i using the euclidean distance,i.e.θi xθp i x.Weight func-tions are assumed to be smooth,positive,and monotonicallydeacreasing(have positivefirst derivative).The weighted average of points at a location s in space isa s ∑N1i0θi s p i∑N1i0θi s(1)and the weighted co-variance at s in direction n describes how well a plane n s x0fits the weighted points:σ2n s ∑N1i0θi s n s p i2∑N1i0θi s(2)Letσs be the vector of weighted co-variances along the directions of the canonical baseσs σ100sσ010sσ001s(3)then the major axes(i.e.directions of smallest and largest weighted co-variance at a point s)are accesible as the eigen-vectors of the bilinear formΣsσsσs T(4) where an eigenvalue is the co-variance along the direction of the associated eigenvector.Our computation and definition of the surface mainly de-pends on local frames,which are built from locally estimated normals.Definition1The normal direction n x x3(or normal for short)is defined as a direction of smallest weighted co-variance,i.e.min nσ2n x.If n is unique the normal is well-defined.It is clear that the normal in x is given as the eigenvector of the co-variance matrixΣx corresponding to the smallest eigenvector.The normal is well-defined exactly ifΣx has an eigenvalue that is strictly smaller than all other eigenval-ues.We define the surface implicitly based on normal direc-tions and weighted averages.The implicit function f:3 describes the distance of a point x to the weighted average a x projected along the normal direction n x:f x n x a x x(5)As always,the approximated surface is defined as the zero-set of the implicit function,i.e.x:f x0(6) We know from differential geometry that is a smoothFigure1:The surface is defined implicitly as the zero set of a function f x.In each point x a local normal direction n x is estimated as the direction of minimal weighted co-variance.The implicit function f x describes the distance of a weighted average a x of the points along normal direc-tion.differentiable manifold if f is a smooth function with non-zero gradient at least in anε-tubular neighborhood around the zero-set.Requiring f to be smooth leads to a surprisingly simple and natural sampling criterion:Definition2A surface S is well-sampled with points p i and approximated by if the normals are well-defined in-side a tubular neighborhood around.We will show that this condition is sufficient for f being smooth for points x inside the tubular neighborhood:First note that f is a smooth function in a and n.If all weight func-tions are smooth,the weighted average a and the weighted co-variance matrix are smooth functions in x.Furthermore, eigenvalues are smooth functions in the matrix coefficients and eigenvectors are the solution of a linear system in the eigenvalues and the matrix.Since the normal direction is de-fined as the eigenvector corresponding to the smallest eigen-value,n x is smooth in x as long as one eigenvector is always associated with the smallest eigenvalue.This has to be the case if the smallest eigenvalue is always strictly smaller than all other eigenvalues,i.e.,if all normals are well-defined.The topology of the approximated surface depends on the particular choice of weight functionsθi.It is clear that certainθi could lead to non-manifold approximations and that even if is manifold it’s not necessarily homoemorphic to S.On the other hand,weights could be so chosen that is manifold and,with further restrictions,resembles the topology of S.To give an intuition for this,wefirst consider an infinites-imal ball B around s.Inside the ball,weights are constant and so are a x and n x.Thus,for this region f describes a plane and if this plane passes the ball the approximation ofc The Eurographics Association2003.inside B is a disk.If,furthermore,the gradient of f inside such ball is non-zero,is manifold.We show in the Ap-pendix that using Gaussians as weight functions is sufficient for non-zero gradient at f x0.For homeomorphic reconstruction the support of the weights should be so chosen that they separate differentsheets of the surface(note that sufficient sampling is a pre-requisite for differentiation of sheets).As Gaussians have in-ifinite support we have no practical means to construct theo-retically correct weights yet,however,in practice Gaussians with approriate radius perform quite nicely(as is demon-strated in Section6).4.Ray-surface intersectionsThe surface definition given in the previous section implies a technique to efficiently compute ray-surface intersections. The idea is to evaluate function f,as it provides a rough approximation of the distancefield to for f x0.For fixed n and a Equation5describes the planarfitl x n s a s x(7)to S with respect to the location s(depicted by the dashed line in Figure1).The smaller the distance f s is,the better S is approximated in q,which is the projection of x onto l along n.If f s0q s is a point on the surface.The approximation l is used to converge to S along a ray r, using an iterative scheme similar to the ray tracing approach for MLS-surfaces1.Once an approximation is determined, the equation r r o s t d is inserted in l x,and solving l r0provides t d for the intersection of ray and planarsurface approximation.The series of intersections r i ap-proaches the surface.In theory,once r i is close enough to the surface,the series f r i f r i1f r i2is strictly descreasing and an increase could be used to bail out off the iteration and start over.In practice,however,we have to accomodate imperfect weighting and use more tolerant it-eration conditions:We require that the closest point q on the approximated surface is close to the current position on the ray r i that has been used to compute q as well as close to the next intersection r i1of the ray and the plane l0through q.Specifically,a region of trust T around q has to contain r i and r i1.If not,the iteration is terminated and no ray surface intrsection in the proximity of r0could be reported.How to obtain an initial point r0is discussed later in Sec-tion5.The region T depends on the weighting-function for n x and a x,which affects the size of features in.How to make suitable choices for the weighting-function and T is also addressed in Section5.The procedure sketched above is easily generalized by taking the following point of view:In each point on r a local coordinate system is created using the approximation of a normal direction.In this coordinate system a weighted least square constant approximation to the surface is computedHFigure2:In an intermediate approximation of the ray sur-face intersection r i a local coordinate system H is estab-lished using the direction of minimal weighted co-variance as the normal n(the weighted average is a constant least squares approxima-tion).This local approximation is intersected with the ray and the procedure is repeated.In this setting it seems quite natural to use higher order least squares approximations to the surface in the local coordinate system in an attempt to increase the approximation order of the scheme.In retro-spect,we have used constant polynomials for the analysis because this allows explicitly solving the linear system that determines the polynomial.The following three steps are iterated until the sequence r0r1r2converges to the ray-surface intersection or the procedure is terminated,focussing on the next region to be examined:1.Support plane:The normal of a support plane H in r i isdetermined by minimizing the weighted distances of the points p j to H.The weights are computed from the dis-tances of the p j to r i using a smooth,positive,monotone decreasing functionθ(e.g.a gaussianθd e d2h2).This weighted least squares problem is solved by minimizingN∑j1n p j r i2θp j r i(8)The minimization of equation8can be rewritten in bilin-ear formminn1n T B n(9) where B b kl is the matrix of weighted co-variancesb lkN∑j1θj p jkr ikp jlr ilThe minimization problem in equation9is solved byc The Eurographics Association2003.HFigure3:The local coordinate system H is used to com-pute a local bivariate polynomial approximation to.This approximation is intersecte with r to yield the next approxi-mation to the ray surface intersection r i1.computing the eigenvector of B with the smallest eigen-value.The resulting H is approximately parallel to the Surface in the area around its nearest approach to r i.2.Polynomial approximation:The support plane in r i isused to compute a local bivariate polynomial approxima-tion a i of.To determine the coefficients of a i,again a weighted least squares problem is solved by minimizing the equationN∑j1a i x j y j f j2θp j r i(10)where x j y j is the projection of p j onto H in normal direction and f j n p j r i is the height of p j overH.Equation10can be minimized by calculating its gra-dient over the unknown coefficients of the polynomial.This leads to a system of linear equations,which is solved using standard numerical methods.The resulting polyno-mial is a local approximation of the surface.If r i is sufficiently close to,a i is expected be a good approxi-mation to around r i and the intersection r i1of the ray with a i could be used to converge to.3.Intersection:If the ray intersects a i,this point r i1serves as the starting point for the next iteration.If the ray misses a i the iteration is terminated.Only ray-polynomial intersections within T are considered.An intersection is detected,when the constant part c of a i is zero.In prac-tice a c being smaller then aεsuffices to accept r i(or the ray-intersection with a i)as an adequate ray-surface intersection.5.Spatial data structuresIn this Section we describe how to represent a tubular neigh-borhood around the surface.This neighborhood is needed to make sure that the intersection procedure described earlier starts from a suitable point r0.Moreover,using simple primi-tives for the representation of the neighborhood significantly speeds-up ray surface intersection.In practice,the size of a tubular neighborhood around the surface that contains only well-defined normals is unknown a-priori.Our best choice is to construct a spatial region that has a certain maximum dis-tance to the point set as we expect the distance of the points to the reconstructed surface to be bounded.Specifically,we construct a set of balls B i of radiusρi around the points p i.If the surface is contained in the union of the balls the balls are a bounding volume of that is easy to test for intersection.If a ray intersects,it also in-tersects at least one ball containing the intersection.Thus,an intersected ball indicates a potential ray surface intersection. The radius h has to be chosen,to ensure thatN∑i0B i(11)Unfortunately,is unknown a priori.The only a-priori knowledge are the points p i,which are expected to be very close to the surface.Therefore,we choose conservative radiiρi,so that each B i encloses the k-nearest neighbors of p i.In practice,we use k 6.The intersection of a ray with the set of balls can be com-puted efficiently.To quickly determine a subset of poten-tially intersected balls,the balls are arranged within an oc-tree(see Figure4),which is traversed along the ray using a parametric algorithm40.The current octree-voxel provides the candidate balls to be tested against the ray.Intersected balls are sorted along the ray to ensure that thefirst ray sur-face intersection is computed.Each ray ball intersection is handled as follows:The cen-ter p i of B i is used as initial point s for the construction of a local coordinate system and polynomial approximation a i. Using p i for this approximation instead of the ray ball in-tersection has two reasons:First,p i is expected to be close to and should provide a reasonable approximation of the surface around p i.Second,the coordinate system and poly-nomial approximation within B i are independent of the ray and can be stored for intersection with the next ray that in-tersects B i.Intersecting the ray with a i yields r0.Figure4 illustrates this idea.Then the procedure detailed in Section4is applied using B i as the region of trust T.Thus,if the ray intersects the polynomial approximation inside B i,the step is repeated un-til the desired accuracy is reached;otherwise no ray surface intersection is found within B i and the next intersected ball along the ray is inspected.Sometimes it is not important to determine thefirst in-tersection along a ray but only if there is any intersection with the object.A prominent example for rendering algo-rithms are shadow rays in ray tracing.Once a shadow-ray isc The Eurographics Association2003.Figure4:The spatial data structres used to represent a tubular neighborhood around is constructed as union of balls around the points.This region has the property that it contains all points with a certain maximum distance to the points and represents a best guess to the tubular neighbor-hood as points are expected to be close to the surface.For reducing the number of ray sphere intersections an octree is used.obstructed by an opaque object,it is not necessary to deter-mine at what position the rayfirst hits that object.Such a ray can be simply discarded from the illumination computa-tions.This specific ray intersection query can be optimized byfinding an intersection as quickly as possible anywhere on the ray.As spheres intersected close to their center are more likely to contain an intersection with the surface,they are sorted according to the distance d i from the ray to the center c i.The following equation determines the priorityγi of a sphere considering different radiiρi.γiρi d iρi(12)6.Applications&ResultsWe have used the ray surface intersection algorithm to com-pute renderings by means of ray tracing.In practice,we use Gaussian weights,i.e.θi x exp x p i2h2.The global parameter h allows specifying the locality of the ing smaller values for h results in a more lo-cal approximation,larger values could be used to smooth out small variations in the surface(e.g.noise).Since rendering is very fast,estimating useful values for h is done interac-tively.Note that for uneven sampling a localized Gaussian weighting has proven to be beneficial for MLS projection operation37.We have found our surface to exhibit less arti-facts than the surface defined from the MLS projection so that we have not yet experimented with varying values for h. To analyze the performance of the ray intersection algo-rithm we have computed several renderings of theCyber-Figure5:The point set for analysis of the ray surface inter-sections,rendered using different values for the smoothing parameter h:Rabbit Sculpture-Cyberware,67,038points, images rendered with200x400pixel;left:h375105, right:h1700105of the object’s diameterware Rabit Model consisting of67.037points.Connectiv-ity information available in the original data was discarded.The effect of using different values for h is shown in Fig-ure5:the left rabbit results from using h000375d and the right using h0017d,where d is the object’s diameter;as expected,larger values for h yield a smoother surface.The following timings have been acquired using h 0004d and an image raster of200x400pixel on a P4with 2GHz:In10.3seconds ray surface intersections for42,463 of the80,000rays were computed.In total the distance func-tion was evaluated238.715times(each evaluation requires estimating a normal and computing the polynomial approxi-mation).Roughly half of the evaluations lead to an intersec-tion of the surface,the other half leads to bailing out of the iteration.If the center polynmials are stored and reused only 83.922evaluations have to be calculated,where we compute and store the center polynomials on thefly.To estimate the overhead of computing the pixel intensi-ties and intersecting the rays with the spatial data structures we have substituted the ray surface intersection procedure with intersecting precomputed polynomials in the sphere centers.This simplification needs1.3seconds to ray trace the same scene.Apparently,most of the time is spent calcu-lating and intersecting polynomial approximations.An average2.91iterations were sufficient to satisfy a pre-defined precision of p103h,which seems sufficient as features are expected to be larger than h.Table1shows the in reminiscence of its ubiquitous chocolate version in some coun-tries these daysc The Eurographics Association2003.Precision(h)10110310710101011Avg.Iter. 1.99 2.91 4.98 6.5610.4Time(sec)7.911.518.924.642.7 Table1:Average number of iterations until convergence to a ray surface intersection and time needed to render an im-age at resolution of200x400pixels relative to the required precision.average number of iterations until convergence to ray surface intersection and the time to render the whole image relative to the required precision.Increasing the precision by an or-der of magnitude results in about1.5times iterations in aver-age.The maximum precision that could be achieved is about 1010h.Increased the required precision further leads to a numerical breakdown of the procedure,possibly due to the eigenvector computation.This explains the superlinear num-ber of iterations and computation time in the last column of the table.7.ConclusionsWe have presented a surface approximation technique that is based on an iterative ray-surface intersection algorithm. The definition of the surface allows deriving an intuitive cri-terion for sufficient sampling given a weighting function for the points.As the surface is defined by the ray intersection algorithm,ray tracing is a natural way to render the pared to ray tracing point set surfaces1our new approach is two orders of magnitude faster.It is comparable in speed to Schaufler&Jensen’s approach44,however,using a solid surface definition.We admit that our formulation of the sampling criterion has several loose ends and that we are far from having a solid theory,nevertheless,we felt the results are useful and interesting.Important next steps are the definition of weights from a given smooth surface and the minimal extent of the tubular neighborhood.This would make the sampling crite-rion sufficient,yet still not very practical:One could only de-cide that a surface is not well-sampled byfinding a point in-side the neighborhood with undefined normal,which is very unlikely.Rather,we need conditions that necessarily lead to sufficient sampling(possibly accepting some oversampling). AcknowledgementsThe rabbit model depicted in Figure5is courtesy of Cyber-ware,the dragon model in the accompanying video is of the Stanford Computer Graphics Laboratory The early human models in Figure6were3d-digitized by Peter Neugebauer of Polygon Technology Ltd,Darmstadt,Germany using a structured light scanner and the QTSculptor system.References1. A.Adamson and M.Alexa.Ray tracing point setsurfaces.In Proceedings of Shape Modeling Interna-tional2003,May2003.in press,online available at http://www.igd.fhg.de/alexa/paper/raypss.pdf.2.M.Alexa,J.Behr,D.Cohen-Or,S.Fleishman,D.Levin,andC.T.Silva.Point set surfaces.In IEEE Visualization2001,pages21–28,October2001.ISBN0-7803-7200-x.3.M.Alexa,J.Behr,D.Cohen-Or,S.Fleishman,D.Levin,andputing and rendering point set surfaces.IEEE Transactions on Computer Graphics and Visualization, 9(1):3–15,2003.4.N.Amenta,M.Bern,and D.Eppstein.The crust and thebeta-skeleton:Combinatorial curve reconstruction.Graphical Models and Image Processing,60(2):125–135,March1998.5.N.Amenta,M.Bern,and M.Kamvysselis.A new voronoi-based surface reconstruction algorithm.Proceedings of SIG-GRAPH98,pages415–422,July1998.ISBN0-89791-999-8.Held in Orlando,Florida.6.N.Amenta,S.Choi,T.K.Dey,and N.Leekha.A simplealgorithm for homeomorphic surface reconstruction.In Pro-ceedings of the16th Symposium on Computational Geometry, pages213–222,2000.7.N.Amenta,S.Choi,and R.Kolluri.The power crust,unionsof balls,and the medial axis transform.CGTA:Computational Geometry:Theory and Applications,19(2–3):127–153,2001.8.R.K.Beatson and W.A.Light.Fast evaluation of radialbasis functions:methods for two-dimensional polyharmonic splines.IMA J.Numer.Anal.,17(3):343–372,1997.9.R.K.Beatson,W.A.Light,and S.Billings.Fast solutionof the radial basis function interpolation equations:domain decomposition methods.SIAM put.,22(5):1717–1740(electronic),2000.10.R.K.Beatson and G.N.Newsam.Fast evaluation of radial ba-sis functions:moment-based methods.SIAM put., 19(5):1428–1449(electronic),1998.11. F.Bernardini,J.Mittleman,H.Rushmeier, C.Silva,andG.Taubin.The ball-pivoting algorithm for surface recon-struction.IEEE Transactions on Visualization and Computer Graphics,5(4):349–359,October-December1999.ISSN 1077-2626.12.J.-D.Boissonnat.Geometric structues for three-dimensionalshape representation.ACM Transactions on Graphics, 3(4):266–286,October1984.13. B.Curless and M.Levoy.A volumetric method for build-ing complex models from range images.Proceedings of SIGGRAPH96,pages303–312,August1996.ISBN0-201-94800-1.Held in New Orleans,Louisiana.14.T.K.Dey,J.Giesen,and J.Hudson.Delaunay based shape re-construction from large data.In IEEE Symposium on Parallel and Large Data Visualization,pages19–27,2001.15.T.K.Dey and S.Goswami.Tight cocone:A water-tight sur-face reconstructor.In Proceedings of the8th ACM Symposium on Solid Modeling and Applications,2003.c The Eurographics Association2003.。
Senserelations语义关系

Semantic relationships are the foundation of language understanding. By analyzing semantic relationships, one can understand the meaning of words and sentences, and thus comprehend the meaning of the entire text.
要点一
要点二
Detailed description
Semantic conflict refers to the situation where two concepts or entities are contradictory or mutually exclusive in meaning and nature. For example, "peace" and "war" are conflicting because they represent opposite meanings and states.
Semantic relevance
Refers to the existence or attribute of one concept or entity containing the existence or attribute of another concept or entity.
Summary word
Statistical methods
Deep learning based methods
Summary: Based on deep learning methods, neural network models are used to recognize and calculate semantic relationships by learning semantic patterns from corpora.
Ford Fiesta 2011年产品说明书

fi es t aiNDicATor LiGHTSService engine soon light : Illuminates briefly whenthe ignition is turned on. If it remains on or is blinkingafter the engine is started, the on-board diagnosticssystem (OBD-II) has detected a malfunction. Drive in amoderate fashion and contact your authorized dealerAirbag readiness light : Illuminates briefly whenthe ignition is turned on. If this light fails to illuminate,remains on or continues to flash after the engine isstarted, contact your authorized dealer for serviceas soon as possible. A chime will also sound ifthere is a malfunction in the indicator light.(if equipped with a manualIlluminates when the manualtransmission should be shifted to the nexthighest gear in order to maximize fuel efficiency.power Door LockPress to lock/unlock the doors. When theindicator light is illuminated, all doors andthe trunk are locked. When the light isoff, it indicates that one or more doors2(recircuLATeD Air)Press to activate/deactivate air recirculation in the vehicle cabin. Recirculated air mayreduce the amount of time to cool the interior of the vehicle and also may help reduceundesired odors from reaching the interior of the vehicle.STeeriNG wHeeL, if equippeD)Press to access SYNCPress M repeatedly to cycle through all available audio modes.SyNcPress to activate the SYNCSYNC® section (if equipped) in the Entertainment Systems chapter of yourOwner’s Guide for more information.13BE8J 19G217 AAM a r c h2010 F i r s t P r i nt i n gQ u i c k R e f e r e n c eG u i d eF o r d F i es t aL i t h o i nU.S.A.f o r d o w ne r.c o mf o r d.c a15Use extreme caution when using any device orfeature that may take your attention off theroad. Ford recommends against the use of anyhand-held device while driving and that youcomply with all applicable laws. Your primaryresponsibility is the safe operation of the vehicle.InstrumentThis Quick Reference Guide is notintended to replace your vehicleOwner’s Guide which containsmore detailed informationconcerning the features of yourvehicle, as well as importantsafety warnings designed tohelp reduce the risk of injuryto you and your passengers.Please read your entireOwner’s Guide carefully asyou begin learning about yournew vehicle and refer to theappropriate sections whenquestions arise.All information contained inthis Quick Reference Guidewas accurate at the timeof duplication. We reservethe right to changefeatures, operation and/or functionality of anyvehicle specificationat any time. Your Forddealer is the bestsource for the mostcurrent information.For detailed operatingand safety information,please consult yourOwner’s Guide.F o r d M o t o r C o mp a n yC u s t o m e r R e l a t i on s h i p C en t e rP.O.B o x6248 D e a r b o rn,M I481211-800-392-3673(F O R D)(T D D f o r t h e h e a ri n g i m p ai r e d:1-800-232-5952)1e s s e nt I a l f e a t u re sfueL TANk cApAciTy/fueL iNfoYour vehicle has a fuel tank capacity of 12.4 gallons (47 L). Use only “Regular” gasoline with an octane rating of 87. Do not use E85 fuels because your vehicle was not designed to run on fuels with more than 10% ethanol.TirepreSSureThe recommended specifications are on the Safety Compliance Certification Label or Tire Label located on the on the B-Pillar or the edge of the driver’s door. As anadded safety feature, your vehicle is equipped with a tire pressure monitoring system (TPMS) that illuminates a low tire pressure warning light when one or more of your tires is significantly under-inflated. Refer to the Tires, Wheels and Loading chapter in your Owner’s Guide for more information.LocATioN of SpAre TireAND TooLSYour spare tire is located in the trunk. Remove the spare and jack by turning their tie-down bolts counterclockwise. For complete details, refer to your Owner’s Guide.roADSiDe ASSiSTANceYour new Ford Fiesta comes with the assurance and support of 24-hour emergency roadside assistance. Roadside assistance includes such services as: lockout assistance, limited fuel delivery, battery jump starts, changing a flat tire, towing, and winch out. To receive roadside assistance in the United States, call 1 (800) 241-3673. In Canada, call 1 (800) 665-2006.eASyfueL™ ‘No cAp’ fueL SySTemWith this system, you simply open the fuel filler door, insert the nozzle and begin fueling. Wait five seconds from the time the refueling nozzle isshut-off until the nozzle is pulled back out of the fill pipe to allow residual fuel in the nozzle to drain into the tank.This system is self-sealing and therefore protected against dust, dirt, water, snow and ice. To use a portable fuel container, slowly insert the fuel funnel (located in the spare tire compartment in your trunk), and pour the fuel into the funnel. When done, clean the funnel or properly dispose of it. Extra funnels can be purchased from your authorized dealer. Do not use aftermarket funnels as they will not work with the Easy Fuel™ system and may cause damage.HiLL STArT ASSiST(AuTomATic TrANSmiSSioN oNLy, if equippeD)Hill start assist (HSA) makes it easier to pull away when your vehicle is parked on a slope without using a parking brake. When active, this feature allows your vehicle to remain stationary on a slope for up to two to three seconds after you release the brake pedal thereby giving you time to move your foot to the accelerator and pull away. This feature is activated automatically if the sensors detect that the vehicle is on a slope.fueL ecoNomy TipSDriving style can affect fuel usage. With these tips you may be able to change a number of variables and improve your fuel economy.o D rive Sensiblyo K eep your tires properly inflated o U se cruise control when you can o D on’t carry more than you need.You will lose up to 1% in fuel economy per 100 lb (45kg).o O bserve the speed limit. Speedsover 70 mph (112 km/h) decrease your overall fuel economyo E nsure that your car isproperly maintainedo C heck and replace your airfilter regularlyo U se the recommended gradeof motor oilo A void excessive idlingBLiND SpoT mirrorSBlind spot mirrors have an integrated convex spotter mirror in the upper corner on the outside mirrors. These mirrors help increase visibilityalongside the vehicle; thereby helping you see a vehicle which may be in your blind spot. As the vehicle approaches, its image will transition from the main mirror to the blind spot mirror. Refer to your Owner’s Guide for more information.SoS poST-crASH ALerT SySTem™This system provides audible and visual alarms when a crash causes the deployment of airbags or the activation of the safety belt pretensioners. The turn signals will flash and the horn will sound. The horn and lamps will turn off when you press the hazard control button or the vehicle runs out of power.kNee AirBAG SySTem (DriVer’S SiDe oNLy)Located under the instrument panel, this system works along with the driver’s front airbag to help reduce injury to the legs. The knee airbag system will deploy when the driver’s airbag deploys in a collision. Ensure that you are properlyseated and restrained to reduce the risk of death or serious injury. Refer to your Owner’s Guide for more information.ADVANceTrAc ® STABiLiTyeNHANcemeNT SySTemYour vehicle’s AdvanceTrac ® system is comprised of two major components -traction control which helps avoid wheel spin and loss of traction and electronic stability control which helps avoid skids or lateral slides. These components work together to help you maintain stability and steerability of your vehicle during a variety of road conditions. The system activates automatically each time the engine is started and cannot be turned off.perimeTer ALArm (if equippeD)When armed, the perimeter alarm system will sound the horn and flash the park/turn lamps if unauthorized entry is attempted.TurN SiGNAL coNTroLPush the control up or down to the first stop to activate the right or left turn signal. When changing lanes, tap the control up or down for the turn signal to flash one or three times. For information on programming the lane change indicator, refer to Multifunction Display in the Instrument Cluster chapter of your Owner’s Guide.iNTeLLiGeNT AcceSS key (if equippeD)Intelligent access (IA) keys allow you to unlock the vehicle door(s) and start the car without using a key (provided your IA key is within approximately three feet). To unlock the driver’s door, simply have the IA key within range (in yourpocket or purse, for example) and press the lock button on thedoor handle. To start the car, have the IA key within range, depress the brake pedal (automatic transmission) or clutch pedal (manual transmission) andpress the ENGINE START/STOP button next to the steering wheel. The IA key also contains a mechanical key blade which can be used to unlock the driver door if the battery runs low in the transmitter. Simply press and hold the push buttons on the edge of the transmitter and remove the key blade.iNTeGrATeD keyHeAD TrANSmiTTer (ikT) AND iNTeLLiGeNT AcceSS (iA) remoTe eNTry icoNSo P ress once to lock all doors. If all the doors are closed the turn signal lamps will flash twice.o P ressor once to unlock the driver’s door. The interior lamps willilluminate and the parking lamps will flash. Press again within three seconds to unlock all doors.o P resstwice within three seconds to open the trunk.mooN roof (if equippeD)Your moon roof has a built-in sliding shade. To open your moon roof, press the rear of the SLIDE control. If the sliding shade is closed, it will open along with the moon roof. To close, press and hold the front of the SLIDE control. To vent, press the rear of the TILT control. To close from a venting position, press and hold the front of the TILT control to close the moon roof.HeATeD ouTSiDe mirrorS When your rear window defrost is activated, both outside mirrors will be heated to automatically remove ice, mist and fog.HeATeD SeATS (if equippeD)Pressto activate/deactivate.a d d I t I o na l f e at u r e s AuDio SySTemSetting the Clock: Press the H or M buttons on the outside of the multifunction display to access the clock settings. Once you are in the clock setting, press the H or M button repeatedly until the desired number appears. Press OK to confirm and close.Menu: Press to access features such as SIRIUS ® (if equipped), SYNC ® media (if equipped), SYNC ® Phone (if equipped), Audio menu with Sound, DSP Occupancy, DSP Equalizer and other selections.(Sound Menu): Press to access the sound menu and make adjustments to Treble, Bass, Fade (if equipped) and balance settings.SyNc ® (if equippeD)Your SYNC ®system has unique phone and media features which allow you to make and receive hands-free calls as well as play your media selections by artist, album, genre or similar music. You can receive Vehicle Health Reports and set up and use 911 Assist™ which can call emergency services if you have an accident. SYNC ® also offers Services, (Traffic, Directions and Information) which, if activated, can provide turn-by-turn directions, access to traffic reports, sports scores and businesssearches. To learn more about SYNC ® and to set up your profile which will allow you to use the Vehicle Health Report and the Services features, please visit or refer to your Owner’s Guide.SiriuS ® SATeLLiTe rADio (if equippeD)Your vehicle may be equipped with satellite radio. SIRIUS ®satellite radio broadcasts music, sports, news and entertainment programming. For more information and acomplete list of SIRIUS ® satellite radio channels, visit in the United States, www.sirius-canada.ca in Canada, or call SIRIUS ® at 1–888–539–7474. Satellite radio is only available with a valid SIRIUS ® radio subscription.ceNTrAL LockiNG/uNLockiNGTo lock/unlock all vehicle doors from outside the vehicle:o turn the key in the driver’s side door counterclockwise to lock all doors.o turn the key clockwise once to unlock the driver’s door or twice to unlock all doors.facebooktwitterfiesta movementowner’s guideConvenIenCesmartphone interactive. sCan here.。
就业歧视 英语作文

In the contemporary job market,employment discrimination remains a significant issue that affects many individuals,regardless of their qualifications or skills.This essay will explore the various forms of employment discrimination,its consequences,and possible solutions to address this problem.Forms of Employment Discrimination1.Gender Discrimination:This is a common form where women are often paid less than their male counterparts for the same job or are overlooked for promotions.2.Racial Discrimination:Individuals from certain racial backgrounds may face prejudice and bias during the hiring process or in the workplace.3.Age Discrimination:Older workers may be perceived as less adaptable or technologically savvy,leading to their exclusion from certain job opportunities.4.Disability Discrimination:People with disabilities often face barriers in the job market due to misconceptions about their capabilities.5.Religious Discrimination:Some individuals may be discriminated against because of their religious beliefs or practices.6.Sexual Orientation Discrimination:Discrimination based on an individuals sexual orientation is another form that can affect job opportunities and workplace treatment.Consequences of Employment Discrimination1.Inequality in the Workplace:Discrimination leads to an unequal distribution of opportunities,affecting the overall diversity and inclusivity of the workforce.2.Loss of Talent:Companies that discriminate may miss out on talented individuals who could contribute significantly to their success.3.Legal Consequences:Employers can face legal action for discriminatory practices, resulting in financial penalties and damage to their reputation.4.Employee Morale and Turnover:A discriminatory work environment can lead to low morale,high turnover rates,and decreased productivity.5.Social Impact:Employment discrimination perpetuates social inequalities and canexacerbate existing social tensions.Possible Solutions to Employment Discrimination1.Legislation and Policies:Strong laws and company policies that prohibit discrimination are essential to create a fair job market.cation and Training:Employers should provide training to raise awareness about discrimination and promote inclusivity.3.Diversity and Inclusion Initiatives:Companies should actively seek to create a diverse workforce and foster an inclusive environment.4.Blind Hiring Practices:Removing personal identifiers from applications can help to reduce unconscious bias in the hiring process.5.Equal Opportunity Programs:Implementing programs that provide equal opportunities for underrepresented groups can help to level the playing field.6.Accountability and Reporting Mechanisms:Establishing clear channels for reporting discrimination and holding individuals accountable for their actions can deter discriminatory behavior.In conclusion,employment discrimination is a complex issue with farreaching implications.It is crucial for society to recognize and address these challenges to ensure a fair and inclusive job market for all.By implementing effective policies and fostering a culture of respect and equality,we can work towards a more equitable future.。
Review by
Cognitive Science versus Cognitive Ergonomics: A dynamic tension or an inevitable schism? Jean-Michel Hoc, Pietro C. Cacciabue, and Erik Hollnagel (Eds.)Expertise and technology: Cognition and human-computer cooperation. Hillsdale, NJ: Erlbaum, 1995. 289 pp. ISBN 0-8058-1511-2. $45 hardback.Review byWayne D. Gray & Brian D. EhretIn their foreword, the editors give a nod toward the “internationally based human-computer interaction (HCI) community, at the level of research as well as at the level of application” (p. xi). This is the community to which the reviewers belong and as such we eagerly awaited this volume of chapters reporting on the work of the mainly European “large-system” cognitive ergonomics community. After witnessing first-hand the excitement and challenge of applying cognitive theory to HCI, we were more than a little curious as to the successes of and challenges to cognitive theory when it is applied to larger scale applications. Alas, for the most part, we were disappointed. While this book contains several excellent chapters, on the whole we came away with the impression of a community that has isolated itself from mainstream cognitive theory and has little interest in testing or contributing to that theory. Indeed, it is not clear for whom, other than the large-systems community, this book is intended. It is heavily laden with jargon and makes little attempt to establish contact with any other tradition. In addition, the book is somewhat “user-unfriendly” containing a meager 2.5 page subject index and no author index (references are listed only at the end of the chapter in which they are cited).Although our review of the book is primarily negative, several of the chapters are quite good and would justify having your library buy it.The book is organized into three sections, the first pertains to cognition in dynamic environments, the second addresses expertise, and the third deals with human-computer cooperation. These sections are preceded by an overview chapter and are followed by a conclusion chapter.Chapter 1 by Hollnagel, Cacciabue, and Hoc organizes and summarizes the large-system perspective and provides pointers into the literature. Of particular note is the importance given to the role of models and simulations in understanding the complex interactions among humans, systems, and tasks.Section 1 includes four chapters and seems intended to be the theoretical foundations section. Chapter 2, by Hoc, Amalberti, and Boreham, provides a very high level discussion of diagnosis that could benefit from a lessor scope and concrete examples. Chapter 3, by Kjaer-Hansen, is a largely out of date review of “Unitary Theories of Cognitive Architectures.”The two chapters by Caccibue & Hollnagel (ch. 4) and Woods & Roth (ch 5) would like to distinguish between their use of computational cognitive modeling and everyone else’s. The nub of the distinction seems to be between models of “toy tasks” that the authors claim are based in cognitive theory and models of important, real-world tasks that the authors claim must eschew cognitive theory.It is interesting that computational cognitive modeling has flourished in the HCI community by taking an approach opposite to that advocated here. In a tradition going back at least to Card, Moran, & Newell (1983), the HCI community has paid close attention to theories of what Caccibue and Hollnagel refer to as “micro-”cognition with the successful goal of applying suchtheories to real-world HCI tasks. In recent years the HCI community has embraced cognitive architectures such as Soar, ACT-R, and construction/integration with emerging success (Kirschenbaum, Gray, & Young, in press).Although we do not like the distinctions made in these two chapters, we understand the authors’ motivations and offer some distinctions of our own. It is important to distinguish between modeling done for scientific or theoretical purposes versus that done for engineering purposes (the latter has been referred to in the HCI literature as “approximate modeling," Card, et al., 1983). However, we maintain that approximate models can be built upon the foundations established by scientific or theoretical modeling. Modeling not based upon cognitive theory may work well for complex tasks as long as these tasks involve relatively simple cognition (such as much of expert systems where the complexity is in the task not in the head). However, there are dangers to this approach. The entire infrastructure is arbitrary and less constrained than one based upon a cognitive architecture. Also, if more than one cognitive mechanism is required (complex cognition) it is not clear whether the various mechanisms will be able to interact correctly. That degree of coordination would require an architecture. While we do not disagree with their goals, we wish our “large-systems” colleagues were more interested in drawing from and contributing to cognitive theory.Section 2 looks at the development of competence and expertise. The section begins with a clearly written chapter by Boreham on expert-novice differences in medical diagnosis. The remaining chapters are less successful, tending to share three negative characteristics. First, they seem largely out of touch with the mainstream research on expertise as represented, forexample, by the Ericsson & Smith (1991) collection of chapters. Second, many seem intent on developing domain-specific theories that make little contact with existing cognitive theory. Third, in their attempt to make theory-based, taxonomic distinctions they neglect to include case studies and examples that would make these distinctions concrete.Section 3 turns to “Cooperation between humans and computers” and contains the best and worst chapters in the book. In chapter 10, Benchekroun, Pavard, & Salembier present an interesting use of cognitive modeling to predict the influence of a new software system on the communication efficiency of an emergency center. Chapter 11 by Moray, Hiskes, Lee, & Muir is a lovely chapter that shows the application of the social psychology construct of “trust” to human-machine interaction. We left this chapter inspired to read more of the literature on process control.Chapter 12, by Rizzo, Ferrante, & Bagnara presents a collection of categories and anecdotes on human error. Chapter 13, by Millot & Mandiau promises to compare the distributed AI (DAI) approach and the “more pragmatic human engineering approach” (p. 215) to “implementing a cooperative organization” (p 215). The experiment presented to this end seems poorly motivated or maybe just poorly explained.Hollnagel’s chapter 14 sheds much heat and smoke but little light on a number of tangential issues while demonstrating a lack of understanding for much of contemporary cognitive theory. For example, on page 230 he talks about “the useless automaton analogy” and “A particular case is the use of the information processing metaphor (Newell & Simon, 1972) - or even worse,assuming that a human being is an information processing system (as exemplified by Simon, 1972; Newell, 1990).” Later on the same page he says,I will not argue that the automaton analogy is ineffectual as a basis fordescribing human performance per se; I simply take that for granted. (This pointof view is certainly not always generally accepted and often not even explicitlystated, for instance, by the mainstream of American Cognitive Science; it isnevertheless a view which is fairly easy to support.)On page 240 we are subjected to a rather glib and unmotivated, “the lack of proven theories or methods is deplorable. . . . There are many practitioners, and they all have their little flock of faithful followers” and another, in a similar vein, about AI work on adaptive systems.While we believe that theories exist to be challenged, we also believe that in the scientific community challengers need to substantiate their assertions. Indeed, not only is such substance missing, but in the pages that follow Hollnagel proposes a theoretical explanation that sounds in keeping with the Newell and Simon account.We had a better time with the next two chapters. Both Boy in chapter 15 and Lind & Larsen in chapter 16 embrace contemporary cognitive theory with interesting results. While clearly discussed, Boy’s theory nevertheless remains vague due to the lack of a worked example. Lind and Larsen work us through a detailed example of one of their multilevel flow models.The summary chapter is generally well written but, for us, Hollnagel’s smoke (for example, pp. 281-282 and his unmotivated attacks on Simon, page 284) obscures any light the chapter may have been intended to shed.ConclusionsIf the goal of this book was to communicate large-systems cognitive ergonomics to a larger community then we judge that it has missed its mark. While there are several interesting (e.g., chapters 6, 10, 11, 15, and 16) and intellectually stimulating (e.g., chapters 4 and 5) chapters the majority are neither. Some seem intended as “in-house” communications, while others build domain-specific theories with numerous abstract theoretical distinctions without ever embedding the distinctions in example. Worse still, others confuse unsubstantiated assertions and innuendos for intellectual discourse.Cognitive theory is far from sacrosanct. Indeed, in recent years the dynamicism of mainstream cognitive theory has been shown by its adaptation and incorporation of the connectionist challenge from below and its recent response to the challenge of situated action from above (e.g., Vera & Simon, 1993). We firmly believe that applied cognition must be based upon cognitive theory. Any other approach runs one of two risks, either the applied endeavour becomes bogged down with constructing task-specific theories or it tends to the vacuous empiricism that is the bane of much human factors work.ReferencesCard, S. K., Moran, T. P., & Newell, A. (1983). The psychology of human-computer interaction. Hillsdale, NJ: Lawrence Erlbaum Associates.Ericsson, K. A., & Smith, J. (Eds.). (1991). Toward a general theory of expertise: Prospects and limits. New York: Cambridge.Vera, A. H., & Simon, H. A. (1993). Situated action: A symbolic interpretation. Cognitive Science, 17(1), 7-48.Kirschenbaum, S. A., Gray, W. D., & Young (in press, 1996). Cognitive architectures for human-computer interaction. SIGCHI Bulletin.。
医学护理中英文对照外文翻译文献

医学护理中英文对照外文翻译文献(文档含英文原文和中文翻译)宗教信仰在应对乳腺癌患者以后生活中的作用目的:识别并检查新诊断为乳腺癌的老年患者中是否存在宗教和精神应对策略现象。
方法:一个简易样本,由被招募来进行为期6个月的诊断的33名65岁女性组成。
受访者被要求参加一个会提出灵活性问题的结构式访谈。
访谈的誊本由三名研究人员各自独立分析讨论其主题,直至达成共识。
结果:参加者的宗教背景为:17名新教徒,五,六名犹太人,天主教和另外四个其它教徒。
她们在出席宗仪式的频率上存在着很大的不同。
而在健康危机期她们的宗教和/或精神信仰或增加或保持不变。
誊本分析显示出了三个主题。
宗教和宗教信仰为受访者提供了必要的情感支持(91%)、社会支持(70%)来面对她们的乳腺癌,以及赋予了她们一些使日常生活变得有意义的能力,特别是癌症经验(64%)。
结论:宗教和宗教信仰为新诊断为乳腺癌的老年女性患者提供了一些重要的应对这些疾病的方法,这些方法也得到了诊断医生的认可。
这可能对于鼓励这些患者寻求宗教的支持和/或重新与她们的宗教团体再结合是非常重要的。
引言一个关于乳腺癌的新的诊断已被证实对女性有重大的影响(格里,1979;琼斯和格林伍德1994;罗兰和马西,1996分;安徒生,1998)。
在老年妇女中,乳腺癌是最常见的癌症,其影响还会因为人口老龄化继续上升。
更好的了解老年妇女如何应对乳腺癌可以使人们更好的增强功能和改善生活质量。
最近日益让人们产生浓厚兴趣的是,宗教或信仰在患者对乳腺癌的反应中所扮演的角色。
在这些老年人中,宗教经常可以帮助她们缓解生理疾病中的固有压力,比如那些伴随着医师会诊、治疗及其它事件所产生的相关压力(包括罗斯,1982;考恩威博士(1985 - 1986);曼弗雷德和皮克特,1987)。
宗教或者精神依赖的正面效应,一直被认为是社会支持的次要规定,其通过与社会性的或教会有关的方式来进行宗教活动。
人们去教堂敬拜时通过培养友情和社会关系来获得能够提供正式的和非正式的社会网络的支持。
Appraisal Theory

monogloss heterogloss
Engagement: sources of attitudes
monogloss
ENGAGEMENT
heterogloss
PROJECTION… MODALITY… CONCESSION…
monogloss construes a proposition or proposal baldly, with no referencing to sources or alternative positions heterogloss opens things up in various ways via:
Affect: expressing one’s feelings
Positive or negative
Direct or implicit
Direct: emotional state and physical expression Implicit: extraordinary behavior and metaphor
Now, it is applied in other aspects, e.g.:
• • • •
•
Eggins& Slade (1997): in casual conversation Kö ner(2000): in dialogues in common law judgments Hood(2004): in academic writing Li (2004): in commercial, history and autobiographical discourse Martin(2004): in editorial
基于拉普拉斯金字塔分解的多尺度边缘检测_董鸿燕

第34卷第7期 光电工程V ol.34, No.7 2007年7月 Opto-Electronic Engineering July, 2007文章编号:1003-501X(2007)07-0135-06基于拉普拉斯金字塔分解的多尺度边缘检测董鸿燕,王磊,李吉成,沈振康( 国防科技大学 ATR重点实验室,湖南长沙 410073 )摘要:边缘表现为图像中具有奇异性点的集合,利用改进的拉普拉斯金字塔分解捕获这些奇异性点,得到各尺度下的带通图像,通过分析,得出分解后的带通图像在边缘处产生零交叉点,构造统计量帮助提取零交叉点,再通过多尺度边缘融合实现多尺度边缘提取。
与LOG和Canny边缘检测的对比实验表明,所建立的算法能够可靠、有效、精确的获得图像的边缘。
关键词:奇异性;边缘检测;拉普拉斯金字塔;多尺度中图分类号:TN391.4 文献标志码:AMultiscale edge detection based on Laplacian pyramidDONG Hong-yan,WANG Lei,LI Ji-cheng,SHEN Zhen-kang( ATR Laboratory, National University of Defense Technology, Changsha 410073, China ) Abstract:Edge is characterized as the singularity points in the image. Laplacian Pyramid (LP) decomposition was used to capture the point singularities to obtain the multiscale band-pass images. Then it was analyzed that the obtained band-pass images was characterized as zerocrossing at the edges. A zerocrossing detection algorithm assisted by computing a statistic and a multiscale edge synthesizing algorithm were proposed to implement multiscale edge detection. Compared with the edge detectors of LOG (Laplacian of Gaussian) and Canny, the algorithm can detect edges of images more reliably and effectively.Key words:singularity; edge detection; Laplacian pyramid; multiscale引 言图像的边缘定义为周围像素灰度强度不连续的像素点的集合,也就是图像中具有奇异性的像素点的集合。
HumanResourceManagement英文版

Can be used to develop individual HR systems
Recruitment and Selection
Based on past behaviour as the most valid predictor of future behaviour
US - input oriented – what the individual brings to the job
UK - output oriented – the skills, attitudes and knowledge , expressed in behaviours for effective job performance
a job or situation
McClelland 1993
Underlying traits, motives, skills,
characteristics and knowledge related to
superior performance
Boyatsis 1982
Uk v. US definitions
Armstrong 1991
Features of HRM
Management focussed and top management driven
Line management role key Emphasises strategic fit – integration
with business strategy Commitment oriented Two perspectives – ‘hard’ and ‘soft’ Involves strong cultures and values
topsis法的英文专业名词解释大全
topsis法的英文专业名词解释大全Topsis法,全称为Technique for Order Preference by Similarity to an Ideal Solution,是一种多属性决策方法,被广泛用于具有多个评价指标的问题。
该方法通过将各个被评估对象与理想解的相似度进行比较,给出一个综合指标,用于帮助决策者做出最佳选择。
下面将以全面的方式解释Topsis法涉及的专业名词。
1. Multiple Criteria Decision Making (多准则决策)多准则决策是Topsis法所属的领域,它涉及在面对多个决策准则时如何进行权衡和选择的问题。
在实际决策中,往往需要考虑到多个评价指标,例如成本、效益、风险等因素,这就需要使用多准则决策方法来辅助决策过程。
2. Decision Matrix (决策矩阵)决策矩阵是一个包含被评估对象和评价指标的表格,用于收集和整理决策所需的各种数据。
在Topsis法中,决策矩阵是进行决策的起点,它提供了构建模型所需的基本信息。
3. Weighted Sum Model (加权求和模型)加权求和模型是一种常见的多准则决策方法,它将各个评价指标分别乘以相应的权重,并对结果进行求和。
在Topsis法中,加权求和模型用于计算每个决策对象在各个评价指标上的得分。
4. Normalization (归一化)归一化是将不同尺度的数据转化为统一的标准的过程。
在Topsis法中,归一化的目的是为了消除不同评价指标之间的度量单位差异,使得它们可以进行比较。
5. Euclidean Distance (欧氏距离)欧氏距离是一种最常用的距离度量方式,用于计算两个向量之间的距离。
在Topsis法中,欧氏距离被用来衡量每个决策对象与理想解之间的差异程度,差异越小则距离越近。
6. Ideal Solution (理想解)理想解是决策者设定的最优选择,它代表了在理想情况下所有评价指标都能够达到的值。
感官分析术语与分析方法有关的术语

感官分析术语与分析方法有关的术语The document was prepared on January 2, 2021GB —88本标准参照采用国际标准ISO 5492/1~6感官分析──词汇.1 主题内容和适用范围本标准规定了感官分析与分析方法有关的术语.2 术语及其定义被检样品test sample被检验产品的一部分.被检部分test portion直接提交评价员检验的那部分被检样品.参照值reference point与被评价的样品对比的一个选择的值一个或几个特性值,或者某产品的值.对照样control选择用作参照值的被检样品.所有其他样品都与其作比较.参比样reference本身不是被检材料,而是用来定义一个特性或者一个给定特性的某一指定水平的物质.差别检验difference test对两种样品进行比较的检验方法.偏爱检验preference test对两种或多种样品估价更喜欢哪一种的检验方法.成对比较检验paired comparison test为了在某些规定的特性基础上进行比较,而成对地给出样品的一种差别检验方法.三点检验triangular test差别检验的一种方法.同时提供三个已编码的样品,其中有两个样品是相同的,要求评价员挑出其中单个的样品.二-三点检验duo-trio test差别检验的一种方法.首先提供对照样品,接着提供两个样品,其中之一与对照样相同,要求评价员识别.“五中取二”检验“two out of five” test差别检验的一种方法.五个已编码的样品,其中有两个是一种类型的,其余三个是另一种类型,要求评价员将这些样品按类型分成两组.“A”-“非A”检验“A”or“not A”test差别检验的一种方法.当评价员学会识别样品“A”以后,将一系列可能是“A”或“非A”的样品提供给他们,要求评价员指出每一个样品是“A”还是“非A”.排序ranking按指定指标的强度或程度排列一系列样品的分类方法.这种方法只将样品排定次序而不估计样品之间差别的大小.分类classification将样品划归到预先定义的名义类别的方法.评估rating按照类别分类的方法.每种类别按有序标度排列.这是一个排定顺序的过程.评分scoring一种使用数字标度评估的形式.在评分中所使用的数字形成等距或比率标度.分等grading由优选评价员或专家在一个或多个指标的基础上对产品按其质量分类.简单描述检验simple descriptive test对样品的各个指标定性描述的一种检验.这些指标构成了样品的整个特征.定量描述和感官剖面检验quantative descriptive and sensory profile tests用可以再现的方式评价产品感官特性的一种检验方法或理论分析的方法.这种评价是使用以前由简单描述检验确定的词汇中选择的词.稀释法dilution method以逐渐降低的浓度制备样品,然后顺序地检验.筛选screening初步的选择过程.配比matching把一对一对出现的相关的样品相等同的过程.通常用以确定对照的和未知的样品之间或两个未知的样品之间的相似程度.客观方法objective method受人为因素影响最小的方法.主观方法subjective method受人为因素影响较大的方法.量值估计magnitude estimation对指标的强度定值的过程.被定值的比率和评价员的感觉是相同的.独立评价independent assessment在没有直接比较的情况下,评价一种或多种刺激.比较评价comparative assessment对同时出现的样品的比较.质量要素quality factor被挑选用以评价某产品整体质量的因素.标度scale报告评价结果所使用的尺度.它是由顺序相连的一些值组成的系统.这些值可以是图形的,描述的或数字的形式.快感标度hedonic scale表达喜欢或厌恶程度的一种标度.单极标度unipolar scale有零端点的一种标度.例如从无味到很甜这样一种表示溶液味道的标度双极标度bipolar scale在两端点有相反刻度的一种标度.例如从硬的到柔软的这样一种质地标度顺序标度ordinal scale以预先确定的单位或以连续级数作单位的一种标度.顺序标度既无绝对零点又无相等单位,因此这种标度只能提供对象强度的顺序,而不能提供对象之间差异的大小.等距标度interval scale有相等单位但无绝对零点的标度.相等的单位是指相同的数字间隔代表了相同的感官知觉差别.等距标度可以度量对象强度之间差异的大小,但不能比较对象强度之间的比率.比率标度ratio scale既有绝对零点又有相等单位的标度.比率标度不但可以度量对象强度之间的绝对差异,又可度量对象强度之间的比率.这是一种最精确的标度.附加说明:本标准由中华人民共和国农业部提出.本标准由全国农业分析标准化技术委员会归口.本标准由中国标准化综合研究所、中国农科院分析室负责起草.本标准主要起草人毕健、陈必芳、周苏玉.附录 A汉 语 索 引参考件A“A”-“非A”检验 ……………………B被检部分 ………………………………被检样品 ……………………………………… 比较评价……………………………… 比率标度……………………………………… 标度……………………………………C参比样 ………………………………… 参照值 ………………………………………… 差别检验 ……………………………… 差别阈………………………………………… 尝味 …………………………………… 成对比较检验 ………………………………… 稠度…………………………………… 初级评价员 …………………………………… 刺激 …………………………………… 刺激阈…………………………………………D单极标度……………………………… 等距标度……………………………………… 定量描述和感官剖面检动验…………… 觉…………………………………………… 独立评价……………………………… 对比效应……………………………………… 对照样 …………………………………E二-.三点检验………………………F乏味的………………………………… 芳香…………………………………………… 分等…………………………………… 分类…………………………………………… 风味 …………………………………… 风味增强剂…………………………………… 肤觉……………………………………G感官分析 ……………………………… 感官检查 ……………………………………… 感官检验 ……………………………… 感官疲劳……………………………………… 感官评价 ……………………………… 感官适应……………………………………… 感官特性 ……………………………… 感觉 …………………………………………… 感受器 …………………………………H后味…………………………………… 厚味的…………………………………………J基本味假热效简单描述检验…………………………碱味的 ………………………………………… 拮抗效应……………………………… 结实的………………………………………… 接受…………………………………… 觉察阈…………………………………………K开胃…………………………………… 客观方法……………………………………… 可接受性……………………………… 可口性………………………………………… 口感…………………………………… 苦味的 ………………………………………… 快感标度………………………………L老的…………………………………… 量值估计………………………………………M敏感性………………………………N嫩的…………………………………P排序…………………………………… 配比…………………………………………… 偏爱检验 ……………………………… 品尝 …………………………………………… 品尝员 ………………………………… 评分…………………………………………… 评评价小评价员 ………………………………… 平味的…………………………………………Q气味…………………………………… 气味测量……………………………………… 强度…………………………………… 区别……………………………………………R柔软的…………………………………S三点检验 ……………………………… 色觉障碍……………………………………… 涩味的 ………………………………… 筛选…………………………………………… 识别阈………………………………… 视觉…………………………………………… 食欲…………………………………… 手感…………………………………………… 收敛效应………………………………双极标度……………………………………… 顺序标度……………………………… 酥的…………………………………………… 酸感 …………………………………… 酸味的 …………………………………………T特征…………………………………… 甜味的 ………………………………………… 听觉……………………………………W外观…………………………………… 味道…………………………………………… 味觉 …………………………………… 味觉缺失……………………………………… 无味的………………………………… “五中取二”检验……………………………X稀释法………………………………… 咸味的 …………………………………………协同效应……………………………… 心理物理学……………………………………嗅 ……………………………………… 嗅觉 ……………………………………………嗅觉测量……………………………… 嗅觉测量仪……………………………………嗅觉过敏……………………………… 嗅觉减退………………………………………嗅觉缺失………………………………Y掩蔽…………………………………… 厌恶……………………………………………颜色…………………………………… 硬的……………………………………………异常风味 ……………………………… 异常气味 ………………………………………异常特征……………………………… 优选评价员 ……………………………………有硬壳的……………………………… 阈上的…………………………………………余味…………………………………… 阈下的…………………………………………阈………………………………………Z最大阈………………………………… 玷染……………………………………………质地…………………………………… 滞留度…………………………………………知觉 …………………………………… 质量要素………………………………………主观方法……………………………… 专家 ……………………………………………附 录 B英文索引参考件A“A”or“not A”test ……………………………………………………………………………… acceptability………………………………………………………………………………………… acceptance …………………………………………………………………………………………… acid……………………………………………………………………………………………………… after-taste…………………………………………………………………………………………… ageusia………………………………………………………………………………………………… alkaline………………………………………………………………………………………………… anosmia………………………………………………………………………………………………… antagonism …………………………………………………………………………………………… appearance …………………………………………………………………………………………… appetising …………………………………………………………………………………………… appetite ……………………………………………………………………………………………… aroma…………………………………………………………………………………………………… assessor………………………………………………………………………………………………… astringent……………………………………………………………………………………………… auditory sensation ………………………………………………………………………………… aversion ………………………………………………………………………………………………Bbipolar scale………………………………………………………………………………………… bitter…………………………………………………………………………………………………… bland……………………………………………………………………………………………………Ccolour …………………………………………………………………………………………………comparative assessment ……………………………………………………………………………consistency……………………………………………………………………………………………contrast effect………………………………………………………………………………………control …………………………………………………………………………………………………convergence effect …………………………………………………………………………………crisp……………………………………………………………………………………………………crusty …………………………………………………………………………………………………Ddetection threshold…………………………………………………………………………………difference test ………………………………………………………………………………………difference threshold ………………………………………………………………………………dilution method………………………………………………………………………………………discrimination ………………………………………………………………………………………duo-trio test…………………………………………………………………………………………dyschromalops ia………………………………………………………………………………………Eexpert……………………………………………………………………………………………………Ffirm ……………………………………………………………………………………………………flavour …………………………………………………………………………………………………flavour enhancer ……………………………………………………………………………………flavourless……………………………………………………………………………………………Ggrading…………………………………………………………………………………………………gustation ………………………………………………………………………………………………Hhandfeel ………………………………………………………………………………………………hard ……………………………………………………………………………………………………hyperosmia ……………………………………………………………………………………………hyposmia ………………………………………………………………………………………………Iindependent assessment ……………………………………………………………………………insipid…………………………………………………………………………………………………intensity………………………………………………………………………………………………interval scale ………………………………………………………………………………………Kkinesthesis……………………………………………………………………………………………Mmagnitude estimation ………………………………………………………………………………masking…………………………………………………………………………………………………matching ………………………………………………………………………………………………mouthfeel………………………………………………………………………………………………Nnote ……………………………………………………………………………………………………Oobjective method ……………………………………………………………………………………odorimetry ……………………………………………………………………………………………odour……………………………………………………………………………………………………off-flavour ……………………………………………………………………………………………off-note ………………………………………………………………………………………………off-odour ………………………………………………………………………………………………olfactometer …………………………………………………………………………………………olfactometry …………………………………………………………………………………………olfaction ………………………………………………………………………………………………ordinal scale…………………………………………………………………………………………organoleptic attribute………………………………………………………………………………Ppaired comparison test………………………………………………………………………………palatability …………………………………………………………………………………………panel ……………………………………………………………………………………………………perception………………………………………………………………………………………………persistence……………………………………………………………………………………………preference test ………………………………………………………………………………………primary assessor………………………………………………………………………………………primary taste…………………………………………………………………………………………pseudothermal effects………………………………………………………………………………psychophysics…………………………………………………………………………………………Qquality factor ………………………………………………………………………………………quantative descriptive and sensory profile tests …………………………………………Rranking…………………………………………………………………………………………………rating …………………………………………………………………………………………………ratio scale……………………………………………………………………………………………receptor…………………………………………………………………………………………………recognition threshold………………………………………………………………………………reference ………………………………………………………………………………………………reference point ………………………………………………………………………………………residual taste ………………………………………………………………………………………Ssalty ……………………………………………………………………………………………………sapid……………………………………………………………………………………………………scale……………………………………………………………………………………………………scoring…………………………………………………………………………………………………screening………………………………………………………………………………………………selected assessor ……………………………………………………………………………………sensation ………………………………………………………………………………………………sensitivity……………………………………………………………………………………………sensory adaptation …………………………………………………………………………………sensory analysis………………………………………………………………………………………sensory evaluation……………………………………………………………………………………sensory examination …………………………………………………………………………………sensory test……………………………………………………………………………………………sensory fatigue………………………………………………………………………………………simple descriptive test……………………………………………………………………………skin sensation ………………………………………………………………………………………smell,to…………………………………………………………………………………………………soft ……………………………………………………………………………………………………sour………………………………………………………………………………………………………stimulus…………………………………………………………………………………………………stimulus threshold …………………………………………………………………………………subjective method……………………………………………………………………………………sub-threshold…………………………………………………………………………………………supra-threshold………………………………………………………………………………………sweet ……………………………………………………………………………………………………synergism………………………………………………………………………………………………Ttaint……………………………………………………………………………………………………taste ……………………………………………………………………………………………、tasteless………………………………………………………………………………………………taster………………………………………………………………………………………………………tasting ……………………………………………………………………………………………………tender ……………………………………………………………………………………………………terminal threshold ……………………………………………………………………………………test portion………………………………………………………………………………………………test sample ………………………………………………………………………………………………texture……………………………………………………………………………………………………threshold…………………………………………………………………………………………………tough………………………………………………………………………………………………………triangular test …………………………………………………………………………………………“two out of five”test………………………………………………………………………………Uunipolarscale ………………………………………………………………………………………Vvisual sensation ……………………………………………………………………………………。
大学生活英语作文120

大学生活英语作文120College life is a significant phase in ones life marking the transition from adolescence to adulthood. It is a time of exploration learning and personal growth. Here is a detailed composition about university life highlighting various aspects that make it a unique experience.Title The Enriching Journey of University LifeIntroductionThe university years are often remembered as the golden years of life. It is a period filled with new experiences friendships and opportunities for personal development. As I step into the hallowed halls of academia I am eager to embrace the challenges and rewards that lie ahead.Academic PursuitsThe primary purpose of attending university is to further ones education. The rigorous academic curriculum not only equips students with specialized knowledge but also hones critical thinking and problemsolving skills. Engaging in research projects and attending seminars allows students to delve deeper into their fields of interest fostering a love for lifelong learning.Campus LifeCampus life is a vibrant mosaic of activities. From joining clubs and societies to participating in sports and cultural events there is something for everyone. These activities provide a break from the academic rigor allowing students to explore their passions and develop new skills outside the classroom.Social InteractionsUniversity is a melting pot of diverse individuals from different backgrounds. Interacting with peers from various cultures and walks of life broadens ones perspective and fosters a sense of global citizenship. Forming friendships in university often leads to lasting bonds as these relationships are built on shared experiences and mutual growth.Personal DevelopmentLiving away from home for the first time students learn to manage their time finances and responsibilities. This independence is crucial in developing selfreliance and maturity. Moreover the challenges faced during university life such as balancing studies andextracurricular activities teach resilience and adaptability.Career PreparationUniversities often provide resources for career development including career counseling internships and networking events. These opportunities help students gain practical experience and insights into their chosen fields preparing them for the professional world. ConclusionIn conclusion university life is a transformative journey that goes beyond academics. It is a time to explore learn and grow both intellectually and personally. Embracing the opportunities and challenges that come with university life can lead to a fulfilling and wellrounded experience that shapes ones future.ReflectionAs I reflect on my own university journey I am grateful for the lessons learned the friendships formed and the personal growth achieved. The memories and experiences from this period will undoubtedly serve as a foundation for my future endeavors.。
锻炼身体英语作文带翻译

Exercising is an essential part of maintaining a healthy lifestyle.It not only strengthens the body but also enhances mental wellbeing.Here is an essay on the importance of physical exercise,followed by its translation into Chinese.English Version:The Importance of Physical ExerciseIn todays fastpaced world,where technology and sedentary lifestyles are becoming increasingly prevalent,the significance of physical exercise cannot be overstated. Engaging in regular physical activity is crucial for maintaining a healthy body and mind.Firstly,exercise is vital for cardiovascular health.It strengthens the heart and improves circulation,which in turn helps to lower blood pressure and reduce the risk of heart diseases.Activities such as running,swimming,and cycling are excellent for cardiovascular fitness.Secondly,regular physical exercise aids in weight management.It helps to burn calories and build muscle,contributing to a healthier body weight and reducing the risk of obesityrelated health issues.Thirdly,exercise is known to boost mental health.It releases endorphins,which are natural mood elevators.This can help to alleviate stress,anxiety,and depression,leading to a more positive outlook on life.Moreover,physical activity can improve cognitive function.It enhances brain plasticity, which is the ability of the brain to adapt and change in response to new experiences.This can lead to better memory,focus,and learning capabilities.Lastly,exercise fosters social interaction.Participating in group sports or fitness classes can help to build a sense of community and camaraderie,which is beneficial for emotional health.In conclusion,incorporating physical exercise into our daily routines is essential for overall wellbeing.It is a key component in the prevention of various diseases and the promotion of a healthy,happy life.Chinese Translation:锻炼身体的重要性在当今快节奏的世界中,科技和久坐的生活方式日益盛行,锻炼身体的重要性不言而喻。
英语作文做锻炼使我快乐

Exercise is a fundamental part of a healthy lifestyle,and it brings a myriad of benefits that extend far beyond just physical health.Heres how engaging in regular physical activity can make you happy:1.Release of Endorphins:When you exercise,your body releases endorphins,which are natural mood elevators.These chemicals interact with the receptors in your brain that help alleviate pain and trigger a positive feeling,commonly referred to as a runners high.2.Stress Relief:Physical activity is a great way to relieve stress.It provides a healthy distraction from daily worries and helps clear your mind.The physical exertion can serve as an outlet for tension and anxiety.3.Improved Sleep:Regular exercise can help you fall asleep faster and deepen your sleep.A good nights sleep is essential for overall wellbeing and can significantly impact your mood and energy levels.4.Increased Confidence:As you exercise regularly and see improvements in your strength,endurance,and physique,your selfesteem and confidence can increase.This can lead to a more positive selfimage and a happier outlook on life.5.Social Interaction:Many forms of exercise,such as team sports or group fitness classes, provide opportunities for social interaction.Being part of a group can foster a sense of belonging and improve your mood through shared experiences and camaraderie.6.Routine and Discipline:Establishing a regular exercise routine can give you a sense of accomplishment and discipline.This structure can lead to better time management and a more organized life,which can contribute to a happier state of mind.7.Boost in Energy Levels:Exercise increases your heart rate and boosts your metabolism, which can lead to increased energy levels throughout the day.Feeling energized can improve your mood and make you feel more capable of tackling daily tasks.8.Improved Cognitive Function:Regular physical activity has been linked to improved cognitive function,including better memory and concentration.A sharper mind can contribute to a more positive and productive life.9.Sense of Achievement:Setting and achieving fitness goals can provide a sense of accomplishment.Whether its running a certain distance,lifting a specific weight,or mastering a new exercise,these achievements can be a source of joy and satisfaction.10.Connection with Nature:If your exercise routine includes outdoor activities like hiking,cycling,or running,you can enjoy the additional benefits of being in nature, which is known to have a calming and rejuvenating effect on the mind.Incorporating exercise into your daily routine is not just about physical health its about nurturing your mental and emotional wellbeing.So,lace up those sneakers,hit the gym, or take a walk in the park,and let the joy of exercise enhance your life.。
证明信英语作文
证明信英语作文Dear Sir or MadamI am writing this letter to confirm the authenticity of the documents provided by Mr. John Smith who is applying for a position at your esteemed organization. As his former supervisor at XYZ Corporation I have had the privilege of working closely with him for the past five years and I am wellacquainted with his professional capabilities and personal attributes.Mr. Smith joined our company as a junior software engineer and quickly demonstrated his exceptional technical skills and innovative thinking. Over the years he has been promoted to a senior developer and has played a pivotal role in the development of several successful projects. His proficiency in programming languages such as Java Python and C is commendable and he has consistently delivered highquality work within tight deadlines.Moreover Mr. Smith is a team player who collaborates effectively with his colleagues. He is always willing to share his knowledge and assist others in solving complex problems. His excellent communication skills and ability to explain technical concepts in a clear and concise manner have greatly contributed to the success of our team.In addition to his technical expertise Mr. Smith has displayed outstanding leadership qualities. He has led multiple crossfunctional teams and has successfully managed projects from inception to completion. His ability to delegate tasks motivate team members and make informed decisions under pressure has earned him the respect of his peers and superiors.Furthermore Mr. Smith has actively participated in various professional development programs and has continuously updated his skills to stay abreast of the latest industry trends. His dedication to lifelong learning and his commitment to excellence are truly admirable.In conclusion I wholeheartedly recommend Mr. John Smith for the position you are offering. His technical expertise teamwork leadership skills and dedication to professional growth make him an ideal candidate for your organization. I am confident that he will be an asset to your team and will contribute significantly to your companys success.Please feel free to contact me if you require any further information or clarification. SincerelyYour NameYour TitleYour CompanyYour Contact Information。
欣赏他人英语作文
Appreciating others is a virtue that enriches our lives and fosters a positive environment.Here are some key points to consider when writing an essay on appreciating others in English:1.Introduction:Begin your essay by introducing the concept of appreciation.You might mention how it is an essential aspect of human interaction and contributes to building strong relationships.2.Importance of Appreciation:Discuss why it is important to appreciate others.This could include points such as:Positive Reinforcement:Appreciation can encourage people to continue doing good deeds or performing well in their tasks.Enhancing Relationships:It can strengthen bonds between friends,family,and colleagues.Boosting Morale:Recognition of someones efforts can significantly improve their morale and motivation.3.Ways to Show Appreciation:Provide examples of how one can appreciate others: Verbal Praise:Complimenting someone directly for their work or actions.Written Commendation:Writing a thankyou note or a letter of appreciation.Public Acknowledgment:Recognizing someones achievements in a public setting, such as during a meeting or event.Gifts or Rewards:Giving a token of appreciation,like a gift or a reward for their efforts.4.Impact of Appreciation:Explain the impact that appreciation can have on individuals and society as a whole.This could include:Improved SelfEsteem:When people are appreciated,they feel valued and respected, which can boost their selfesteem.Increased Productivity:A sense of being appreciated can lead to increased productivity and job satisfaction.Stronger Communities:A culture of appreciation can lead to stronger,more cohesive communities.5.Overcoming Barriers to Appreciation:Discuss any potential barriers to showing appreciation,such as shyness,cultural differences,or fear of appearing insincere.Offer suggestions on how to overcome these barriers.6.Personal Experience:Share a personal anecdote or story where you appreciated someone or when someone appreciated you.This can help illustrate the power ofappreciation in a tangible way.7.Conclusion:Conclude your essay by summarizing the main points and emphasizing the importance of making appreciation a regular practice in our daily lives.Encourage readers to consider how they can incorporate more appreciation into their interactions with others.8.Call to Action:End with a call to action,urging readers to start appreciating the people around them,whether its through a simple thank you,a kind word,or a thoughtful gesture.Remember to use clear and concise language,provide specific examples,and maintain a positive and engaging tone throughout your essay.This will help convey the message effectively and inspire readers to appreciate others more in their own lives.。
内向者和外向者英语作文
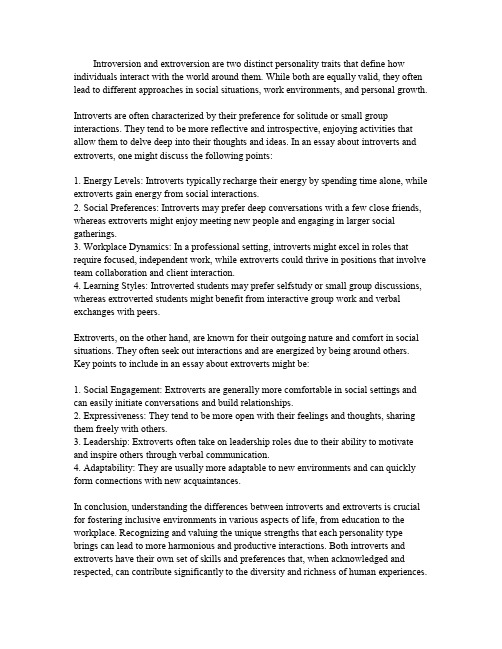
Introversion and extroversion are two distinct personality traits that define how individuals interact with the world around them. While both are equally valid, they often lead to different approaches in social situations, work environments, and personal growth.Introverts are often characterized by their preference for solitude or small group interactions. They tend to be more reflective and introspective, enjoying activities that allow them to delve deep into their thoughts and ideas. In an essay about introverts and extroverts, one might discuss the following points:1. Energy Levels: Introverts typically recharge their energy by spending time alone, while extroverts gain energy from social interactions.2. Social Preferences: Introverts may prefer deep conversations with a few close friends, whereas extroverts might enjoy meeting new people and engaging in larger social gatherings.3. Workplace Dynamics: In a professional setting, introverts might excel in roles that require focused, independent work, while extroverts could thrive in positions that involve team collaboration and client interaction.4. Learning Styles: Introverted students may prefer selfstudy or small group discussions, whereas extroverted students might benefit from interactive group work and verbal exchanges with peers.Extroverts, on the other hand, are known for their outgoing nature and comfort in social situations. They often seek out interactions and are energized by being around others. Key points to include in an essay about extroverts might be:1. Social Engagement: Extroverts are generally more comfortable in social settings and can easily initiate conversations and build relationships.2. Expressiveness: They tend to be more open with their feelings and thoughts, sharing them freely with others.3. Leadership: Extroverts often take on leadership roles due to their ability to motivate and inspire others through verbal communication.4. Adaptability: They are usually more adaptable to new environments and can quickly form connections with new acquaintances.In conclusion, understanding the differences between introverts and extroverts is crucial for fostering inclusive environments in various aspects of life, from education to the workplace. Recognizing and valuing the unique strengths that each personality type brings can lead to more harmonious and productive interactions. Both introverts and extroverts have their own set of skills and preferences that, when acknowledged and respected, can contribute significantly to the diversity and richness of human experiences.。
做运动英语作文

Doing sports is a wonderful way to keep fit and healthy.It not only strengthens the body but also enhances the mind.Here are some benefits and tips for engaging in sports activities:1.Health Benefits:Regular physical activity can improve cardiovascular health,increase muscle strength,and help maintain a healthy weight.It also boosts the immune system and can reduce the risk of chronic diseases such as diabetes and high blood pressure.2.Mental Wellbeing:Engaging in sports can release endorphins,which are natural mood lifters.This can help reduce stress,anxiety,and depression,contributing to a more positive outlook on life.3.Social Interaction:Participating in team sports can foster camaraderie and build lasting friendships.It also provides opportunities to develop communication and teamwork skills.4.Discipline and Time Management:Training for sports requires dedication and commitment,which can translate into better time management and discipline in other areas of life.5.Choosing the Right Sport:Its important to choose a sport that you enjoy and that suits your physical abilities.This could be anything from swimming,running,cycling,to team sports like soccer,basketball,or volleyball.6.Setting Goals:Whether its to improve your fitness level,compete in a tournament,or simply to enjoy the activity,setting goals can motivate you to stay consistent with your training.7.Safety First:Always warm up before starting any sport to prevent e proper equipment and follow the rules of the game to ensure safety.8.Nutrition:A balanced diet is essential for athletes.It provides the necessary energy and nutrients to perform at your best and recover after workouts.9.Rest and Recovery:Giving your body adequate rest is crucial for preventing overtraining and injuries.It also allows for muscle growth and repair.10.Staying Motivated:Find ways to keep your interest in sports alive.This could be by joining a club,participating in different sports,or setting new challenges for yourself.In conclusion,sports are an integral part of a healthy lifestyle.They offer numerousphysical and mental health benefits,promote social interaction,and can be a source of enjoyment and personal growth.Remember to choose activities that you love,stay safe, and have fun!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Approximate Orientation Steerability Based onAngular GaussiansWeichan Yu,Kostas Daniilidis,and Gerald SommerAbstract—Junctions are significant features in images with in-tensity variation that exhibits multiple orientations.This makes the detection and characterization of junctions a challenging problem. The characterization of junctions would ideally be given by the response of a filter at every orientation.This can be achieved by the principle of steerability that enables the decomposition of a filter into a linear combination of basis functions.However,cur-rent steerability approaches suffer from the consequences of the uncertainty principle:In order to achieve high resolution in ori-entation they need a large number of basis filters increasing,thus, the computational complexity.Furthermore,these functions have usually a wide support which only accentuates the computational burden.In this paper we propose a novel alternative to current steer-ability approaches.It is based on utilizing a set of polar separable filters with small support to sample orientation information.The orientation signature is then obtained by interpolating orientation samples using Gaussian functions with small pared with current steerability techniques our approach achieves a higher orientation resolution with a lower complexity.In addition, we build a polar pyramid to characterize junctions of arbitrary inherent orientation scales.Index Terms—Low-level vision,orientation analysis,steerable filters.I.I NTRODUCTIONJ UNCTIONS of gray-value lines or edges in images carry important information for many image processing tasks like point matching in object recognition,point tracking in motion analysis,attentive coding,and line-drawing interpolation[14]. In order to use junctions for such tasks we must be able to lo-calize their corresponding keypoints which are defined as in-tersection points of lines or edges.Then,we must characterize junctions by means of signatures and classify them in junc-tion categories.Regarding keypoint detection and localization the reader is referred to Foerstner’s study[8]and the work of Parida et al.[16]and to the comparison of different operators by Rohr[21],[22].In this paper we address the problem of junctionManuscript received May20,1999;revised October13,2000.W.Yu was supported by DAAD(German Academic Exchange Service).K.Daniilidis and G.Sommer were supported by DFG Grant320/1-3.K.Daniilidis was also supported by the NSF under Grants CDS-97-03220and ARO/MURI DAAH04-96-1-0007,Advanced Network and Services,and Penn Research Foundation.The associate editor coordinating the review of this manuscript and approving it for publication was Dr.Eric ler.W.Yu and G.Sommer are with the Institute of Computer Science,Christian Albrechts University,D-24105Kiel,Germany(e-mail:wy@rmatik.uni-kiel.de;gs@rmatik.uni-kiel.de).K.Daniilidis is with the GRASP Lab,University of Pennsylvania,Philadel-phia,PA19104-6228USA(e-mail:kostas@).Publisher Item Identifier S1057-7149(01)00912-5.characterization.The resulting signature can be used for further junction classification.Junctions are local structures with multiple intrinsic orienta-tions and spatial scales[2].For the purpose of characterization we project them onto the orientation space and build a one-di-mensional(1-D)signature function of the orientation parameter. Such signatures are often obtained by applying a set of filters at different orientations.This leads to an enormous computa-tional load.For example,in order to extract orientation infor-mation of a junction,with conventional filter methods we have to rotate the same filter around the keypoint repeatedly.For an angular fieldofapproach.Freeman’s and Adelson’s approach to orientation steerability of a Gaussian derivative is an interpolation using rotated copies of the original filter.The derived kernels do not possess sufficient orientational resolution due to theirlarge spatial support in orientation.Moreover,they are either symmetric or antisymmetric [23].This results in a period ofin(2)to be the same as the spatial domain variable.For clarity,we change the notation to(3)Here,the interpolation functions,yieldingfrequencies as in thestandard Fourier decompositions.In this paper,we point out that the exact approach to orien-tation steerability has insufficient orientational resolution be-cause it is based on the sampling of the angular frequency.To achieve a high orientational resolution a huge number of fil-ters must be used.This computational burden is amplified by the large support of the basis functions.We will also introduce a new approximation approach based on Gaussian functions which might be nonoptimal with respect to the approximation error but substantially alleviates the above problems as shown in theory and experiments.We extend this approach to an efficient hierarchical scheme and provide a complete analysis of compu-tational complexity.Thus,by considering only the problem oforientation steerability,we sacrifice a coherent algebraic theory (as in Lie group and SVD-based deformability approaches)to achieve high orientational resolution as well as a dramatical de-creasing of the computational complexity.This paper is organized as follows:In Section II we intro-duce the new approximate steerability approach based on an-gular Gaussians and point out the theoretical difference between our approach and current steerability approaches.Besides,we analyze their computational complexity in detail.In Section III we further introduce a polar pyramid scheme to treat orientation scale variations.Then we present experimental results on both synthetic and real data which vividly show a better performance of our approach.The paper is concluded with a short discussion.II.A PPROXIMATE O RIENTATION S TEERABILITYA.DefinitionIn the study of local orientation,we first conduct a local polar transformation of the image from Cartesian to the polar coordi-nate system and denote the new intensity function withandby applying averaging along the radial direction.In order to obtain high orientation resolution,we are interested in filtersYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS195Fig.1.Gaussian averaging mask centered at angleand R>0to avoid the confusion close to the keypoint.with narrow angular support.We choose shifted Gaussian aver-aging functions as basis filters to sample the orientationspace(5)with.Here is an av-eraging factor along the radial direction which is the sum ofdiscrete weights inside the basis filter mask centeredatdenotes the scale of the Gaussian function.Since),wedefine torepresent the minimal circular differencebetween;[see(11)].Here,in Section II-C.In Fig.1,we show a basis filter centeredatanddenote inner and outer boundaries of the mask,respectively.Wesetpixelsand varies from nine to15pixels.After defining basis filters we must interpolate them to buildthe whole set of steerablefilter(of(22).Right:Corresponding interpolation functions at differentlevels.They are Gaussian functions with different scales.In this new steerability approach,the neighboring basis fil-ters as well as the interpolation functions are locally correlatedand therefore nonorthogonal.To achieve optimal steerability wewould have to apply a nonlinear operator to estimate the coeffi-cients of the interpolation function.Instead we use a linear oper-ator and achieve an approximate steerability which approachesoptimality with decreasing support and thus increasing orthogo-nality of the Gaussians.Approximating a function with a sum ofGaussians is a well-known method with properties extensivelydescribed in the radial basis function approximation proposedby Poggio and Girosi[19].If we ignore the penalty term in196IEEE TRANSACTIONS ON IMAGE PROCESSING,VOL.10,NO.2,FEBRUARY2001Fig.4.Top:Synthetic line junctions.Bottom:S( ).R=15.[19]enforcing smoothness our approach becomes the closer tothe RBF approach when our Gaussians overlap minimally eachother.To increase approximation optimality the centers of theGaussians can be estimated in[19]whereas in our approachthese centers are prechosen.Applying our filter on the intensityfunctiondenotes the absolute value.We point out herethatdenotes the Fourier transform.In contrast,in the exactsteerability the spectrum of a filter response[see(4)]is decom-posed into a series of Dirac sampling functions weighted by thecorresponding basis filterresponsesYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS197Fig.5.Top:Synthetic edge junctions.Bottom:DS( ).The local maxima show the orientation of edges.R=15.Fig.6.Top:A synthetic edge junction disturbed by four increasing levels of random noise.Bottom:Corresponding DS( ).Even in the very noisy case(SNR=0 dB)the signature can characterize the junction.R=15.a function is written as a Fourier series with respect to the angle(see[9,eq.(9)]).Equation(14)is the expression of this fact inthe frequency domain.Note that in(14)the term in[9]isreplaced by198IEEE TRANSACTIONS ON IMAGE PROCESSING,VOL.10,NO.2,FEBRUARY2001Fig.7.Top:Deviation of the keypoint from the central position of the mask.Bottom:DS( ).R=15.Fig.8.(a)So-called“Siemens star”with16edges spanning uniformly the orientation space.(b)Polar plot of the result using the steerable wedge filter[23] composed of46basis filters with31-tap size.In total,61486multiplications and60360additions are needed.The edges are hardly discernible.(c)The same as (b)but using90basis filters with119610multiplications and118440additions.The orientations of the edges are clearly presented.(d)DS( )using the Gaussian averaging steerable filter.We compute only10086multiplications and9006additions to achieve the same resolution.filter in the spatial domain.The price we pay is that we do not achieve exact steerability but an approximation of the orienta-tion response.plexity AnalysisApproximate steerability achieves a higher orientation res-olution with a lower complexity due to the narrow support of the basis filters.Our approach starts with a local polar mapping which can be done“off-line”since it is a transform between co-ordinates and is therefore valid for all different images.Online applying the resulting look-up-table(LUT)is of negligible com-plexity compared with calculating the filter responses.In order to compare the implementation complexity of the approximate steerability and that of the exact approach we set the radial extensions of masks in both schemes to be the same.If we denote the1-D tap size of an exactly steerable filterwith Here,we choose the steerable wedge filter[23]for compar-ison since it has a similar shape to our filter mask.The steer-able wedge filter is a separable polar filter.Its radial component looks like a wedge and its angular component is synthesized by the Fourier series.Its computational complexity is proportional to the number and the spatial support of basis filters.In order to make a fair comparison we apply it after the local polar map-ping,too.Both the approximately steerable filter and the wedge filter are polar separable filters.If we carry out a polar mapping on the images then filter responses can be computed with two1-DYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS199Fig.9.Characterizing a junction using the polar pyramid.Top:A junction composed of two close lines with distance of1pixel,two edges blurred by a Gaussian function with =4and a wide line with a width of6pixels.Middle:The characterizing signatures reconstructed from the first four levels of the polar pyramid: S( ),S( ),and S( ).But two close lines are also recognized as one line.Bottom:CorrespondingDS( ),DS( ),and DScan be seen only at the first two levels.After increasing the scale only outer boundaries of these two lines are recognized.convolutions in radius and angle,respectively.Such a pre-map-ping would have the effect that the complexity of both filters would depend linearly and not quadratically on the tapsize.When comparing with the wedge filter the reader should have in mind that,if convolu-tion were applied,approximate filter would still perform better but only linearly and not quadratically.Suppose we apply a steerable wedge filter composedof basis filters(even basis filters).As mentioned before,all basis filters have the same spatial support as the steered filter,the1-D size of all basis filters istherefore200IEEE TRANSACTIONS ON IMAGE PROCESSING,VOL.10,NO.2,FEBRUARY2001Fig.10.Top:The parkbench with marked edge junctions.A:horizontal edge;B:vertical edge;C:corner;D:“T”-junction.Middle:Steerable wedge filter results using30basis filters.P=19.Bottom:DS( )of the Gaussian averaging steerable filter.The edge near180=3;RDTDYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS201Fig.11.Resolution comparison between the steerable wedge filter [23]and the Gaussian averaging steerable filter.Top Left:The image “Lena”with her lips corner as a keypoint.Top Right:Lips corner in detail.Bottom Left:Polar plots using the steerable wedge filter [23]with 46basis filters.Only the dominant dark line between the lips can be recognized.Bottom Middle:Even with 90basis filters we cannot recognize two lips.Bottom Right:DS ( )of the Gaussian averaging steerable filter.The edges of two lips are characterized distinctly.frequency of the Gaussianfunctionhence(16)On one hand,we should set the scaleparametermust be atleastadditions to calculateone angular sampling.Taking into accountthatsamples.Inconstructingas interpolation functions.In order toproduce thesignatures multiplicationsand202IEEE TRANSACTIONS ON IMAGE PROCESSING,VOL.10,NO.2,FEBRUARY2001parison between the steerable wedge filter[23]and Gaussian averaging steerable filter.Row1:An image of the NASA sequence with four kinds of marked junctions.A:“Y”junction;B:“V”junction;C:“T”junction;D:“K”junction.Row2:Junctions in detail.The keypoints are not always at centers of the masks.Row3:Polar plots using the steerable wedge filter[23]using46basis filters with31tap size.Row4:DS( )using the Gaussian averaging steerable filter (R=15).Both methods are stable with respect to the offsets of keypoints.Our method presents higher orientation resolution with lower cost.scale of a filter is too small,a blurred edge is not visible and a wide line will be recognized as two edges[12].If the orientation scale of a filter is too large,two very close lines will be charac-terized as one line.In this paper we introduce a polar pyramid to obtain signatures of different scales efficiently.Here we do not treat the problem of steering spatial scale.Regarding the steer-ability of spatial scale the reader is referred to[11],[18].It is known that one of the most appealing kernels for hierar-chical approaches is the Gaussian function[1].We know from spatial scale theory that the choice of scale necessitates a hier-archical treatment.Burt and Adelson[5]prove that a generating kernel of subsampling can be used as the interpolation function for reconstruction from coarser scales.Moreover,they argue that the interpolation functions can be(discrete approximations of)Gaussian functions with different scales(Fig.3).Thus,the continuous orientation information can be reconstructed from all levels of the polar pyramid by interpolating the pyramid el-ements with Gaussianfunctionsth level of the polar pyramidandYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS203Fig.13.Top Left:Face of a child.Top Right:Its left eye corner in detail.It can be regarded as a combination of irregular wide lines and blurred edges disturbed by noise.Middle:Orientation signatures reconstructed from the first,third and fifth level of the polar pyramid.The eyelids are clear to see in Sand 225is due the white of the eye.Bottom:Corresponding DS ( ),DS ( ).At small scales the signatures present more detail,but are also sensitive to noise.At large scales we obtain dominant structures but lose details.A valid characterization should combine all these signatures.whereis the number of levelsand is the number ofsamples at the highest level.Taking the periodicity into account we shouldhave-th coefficient of the FIR filter in the should benormalized204IEEE TRANSACTIONS ON IMAGE PROCESSING,VOL.10,NO.2,FEBRUARY2001 Moreover,Every sample at a given level should make equal con-tributions to construct the next higher level.The contributionsof one sample are weighted by the corresponding coefficients ofthe generating kernels.Equal contributions imply that the sumof all its connected elements in the generating kernels should bea constant.As mentioned in[5],the generating kernels satisfying theabove constraints should have Gaussian shape.We use the fol-lowing discrete approximations of Gaussian functions to serveas generating kernels with subsampling factor two,three,andfive(22)”junction in D where the blurrededgenearYU et al.:APPROXIMATE ORIENTATION STEERABILITY BASED ON ANGULAR GAUSSIANS205Last we mention the narrow support of the basis functions of our approach enables a high orientational resolution with a mod-erate computational load.We showed this difference to earlier approaches both in theory as well as in real images of junctions.A CKNOWLEDGMENTThe authors would like to thank H.Farid,G.Birkelbach, H.Scharr,M.Michaelis,T.Bülow,V.Krüger,U.Heute,M. Felsberg and H.Chen for their helpful suggestions and discus-sions.H.Farid has kindly provided the software for the steerable wedge filter and the“parkbench”picture.The authors highly ap-preciate the reviewers’valuable comments which helped them on clarifying and improving the paper.R EFERENCES[1]J.Babaud,A.P.Witkin,M.Baudin,and R.O.Duda,“Uniqueness ofthe Gaussian kernel for scale-space filtering,”IEEE Trans.Pattern Anal.Machine Intell.,vol.8,pp.26–33,1986.[2] D.H.Ballard and L.E.Wixson,“Object recognition using steerablefilters at multiple scales,”in IEEE Workshop Qualitative Vision,1993, pp.2–10.[3]W.Beil,“Steerable filters and invariance theory,”Pattern Recognit.Lett.,vol.15,pp.453–460,1994.[4]R.N.Bracewell,The Fourier Transform and Its Applications.NewYork:McGraw-Hill,1986.[5]P.J.Burt and E.H.Adelson,“The Laplacian pyramid as a compactimage code,”IEEE mun.,vol.31,pp.532–540,1983.[6]P.-E.Danielsson,“Rotation-invariant linear operators with directionalresponse,”in Proc.Int.Conf.Pattern Recognition,Miami,FL,Dec.1980.[7]J.G.Daugman,“Uncertainty relation for resolution in space,spatial fre-quency and orientation optimized by two-dimensional visual cortical fil-ters,”J.Opt.Soc.Amer.,vol.2,no.7,pp.1160–1169,1985.[8]W.Förstner,“A framework for low level feature extraction,”in Proc.3rdputer Vision,J.O.Eklundh,Ed.Stockholm,Sweden: Springer,May2–6,1994,vol.II,pp.383–394.[9]W.T.Freeman and E.H.Adelson,“The design and use of steerablefilters,”IEEE Trans.Pattern Anal.Machine Intell.,vol.13,pp.891–906, 1991.[10]H.Knutsson and G.H.Granlund,“Texture analysis using two-dimen-sional quadrature filters,”in IEEE Comput.Soc.Workshop Comp.Ar-chitecture Patt.Anal.Image Database Mgmt.,1983,pp.388–397. [11]M.Michaelis,“Low level image processing using steerable filters,”Ph.D.dissertation,put.Sci.,University Kiel,Germany,1995.[12]M.Michaelis and G.Sommer,“Junction classification by multiple orien-tation detection,”in Proc.3rd puter Vision,vol.I,Stock-holm,Sweden,May2–6,1994,pp.101–108.[13],“Lie group approach to steerable filters,”Pattern Recognit.Lett.,vol.16,pp.1165–1174,1995.[14]V.S.Nalwa,A Guided Tour of Computer Vision.Reading,MA:Ad-dison-Wesley,1993.[15] A.V.Oppenheim and R.W.Schafer,Digital Signal Pro-cessing.Englewood Cliffs,NJ:Prentice-Hall,1975.[16]L.Parida,D.Geiger,and R.Hummel,“Junctions:Detection,classifi-cation,and reconstruction,”IEEE Trans.Pattern Anal.Machine Intell., vol.20,no.7,pp.687–698,1998.[17]P.Perona,“Steerable-scalable kernels for edge detection and junctionanalysis,”Image put.,vol.10,no.10,pp.663–672,1992.[18],“Deformable kernels for earlyvision,”IEEE Trans.Pattern Anal.Machine Intell.,vol.17,pp.488–499,May1995.[19]T.Poggio and F.Girosi,“Networks for approximatation and learning,”Proc.IEEE,vol.78,pp.1481–1497,Sept.1990.[20] B.Robbins and R.Owens,“2-D feature detection via local energy,”Image put.,vol.15,pp.353–368,1997.[21]K.Rohr,“Recognizing corners by fitting parametric models,”Int.J.Comput.Vis.,vol.9,no.3,pp.213–230,1992.[22],“On the precision in estimating the location of edges and corners,”J.Math.Imag.Vis.,vol.7,pp.7–22,1997.[23] E.P.Simoncelli and H.Farid,“Steerable wedge filters for local orien-tation analysis,”IEEE Trans.Image Processing,vol.5,pp.1377–1382, Sept.1996.[24] E.P.Simoncelli,W.T.Freeman,E.H.Adelson,and D.J.Heeger,“Shiftable multi-scale transforms,”IEEE rm.Theory,vol.38,no.2,pp.587–607,1992.[25]G.Sommer,M.Michaelis,and R.Herpers,“The SVD approach forsteerable filter design,”in IEEE Int.Symp.Circuits Systems,vol.V, Monterey,CA,May31-June3,1998,pp.349–353.[26]P.C.Teo and Y.H.Or,“Lie generators for computing steerable func-tions,”Pattern Recognit.Lett.,vol.19,no.1,pp.7–17,1998. Weichan Yu received the B.S.and M.S.degrees in electronic engineering from Tsinghua University and Wuhan Technical University of Surveying and Map-ping,China,in1993and1995,respectively.Since1996he has been a DAAD (German Academic Exchange Service)Scholarship holder pursuing the Ph.D. degree in the Cognitive Systems Group,Christian Albrechts University,Kiel, Germany.His major research interests are signal processing,computer vision,and image analysis.Kostas Daniilidis received the Diploma degree in electrical engineering from the National Technical University of Athens,Athens,Greece,in1986and the Ph.D.degree in computer science from the University of Karlsruhe,Karlsruhe, Germany,in1992.He is an Assistant Professor of computer and information science,University of Pennsylvania,Philadelphia,affiliated with the interdisciplinary GRASP Lab-oratory.Prior to this,he was with the Cognitive Systems Group,University of Kiel,Kiel,Germany.His research centers on omnidirectional vision and vision techniques for tele-immersion and augmented reality.He has served as Member of many Program Committes and he is a reviewer for multiple journals.Dr.Daniilidis was the Chair of the IEEE Workshop on Omnidirectional Vision 2000.Gerald Sommer received the Diploma degree in physics and the Ph.D.degree in physics from Friedrich-Schiller-Universität Jena,Germany,in1969and1975, respectively,and the Habilitation degree in engineering from Technical Univer-sity Ilmenau,Germany,in1988.From1969to1991,he was with several departments of Friedrich-Schiller-University Jena.From1991to1993,he was the Head of the Division for Medical Image Processing,Research Center for Environment and Health(GSF-Medis), Munich—Neuherberg,Germany.Since1993,he has been Professor of computer science at the Christian Albrechts University Kiel,Kiel,Germany.He is leading the research group in cognitive systems.His main interests are the design of be-havior-based systems.His research covers signal theory and signal processing, neural computation for pattern recognition,and robot control.。