三相PWM整流器控制器设计(精)
三相电压型PWM整流器(VSR)及其控制策略的..._图文(精)
whichconditionalrectifier,diode-bridgerectifierlargelyusedtoorphase.controlledrectifier,areprovidedosourcefortheinverters,CaUSetheseriousharmonicproblemofpowerquality,lowpowerfactor,andtoinputside,evenifresistanceloads,inputCan’tfeedbackpowercurrentisn’tsinusoidalwaveformandthepowerfactorisn’tup
ResearchonThree-・phaseVoltagePWMRectifierandThe
ControlStrategies
ABSTRACT
Withtheseriousproblemofharmonicspollutiontothepowersystem,aswell勰theneedofhighperformanceofACdriveapplication,three-phaserectifiershavebeen弱activeresearchtopicinpowerelectronicsPWMtorecently.duethevirtues,suchassinusoidalinputcurrents,unitypowerfactor,steadyoutputvoltage,gooddynamicsandbin-directionalenergyflow.
接着,论文结合瞬时无功功率理论和交流电机理论中矢量控制,提出了PWM整流器的电压空间矢量控制,详细的分析其具体实现,并进行了基于Matlab中的Simulink的仿真研究,仿真结果验证了该控制方法的可行性。文章的最后对滞环电流和电压空间矢量这两种控制方法进行了对比比
【全面版】三相电压型 PWM 整流器原理及控制方法PPT文档

三相电压型 PWM 整流器系统结构图 复位电路采用按键手动复位。
两相电流 传感器
电源 模块
开关器件驱动
直流电压,电流
空基 圆间本,矢 原从量理 而P就 形W是 成M把S(VS三PV相WPWMPWM波)M。控整制流策器略输是入根端据电整压流在器复空平间面电上压转矢换量为切空换间来电控压制矢整与量流保,器护通电的S过V路一P不种W同新M的波的开形控关制状策态略组传。合感构器成8个空间矢量去逼近电压
三相电压型PWM整流
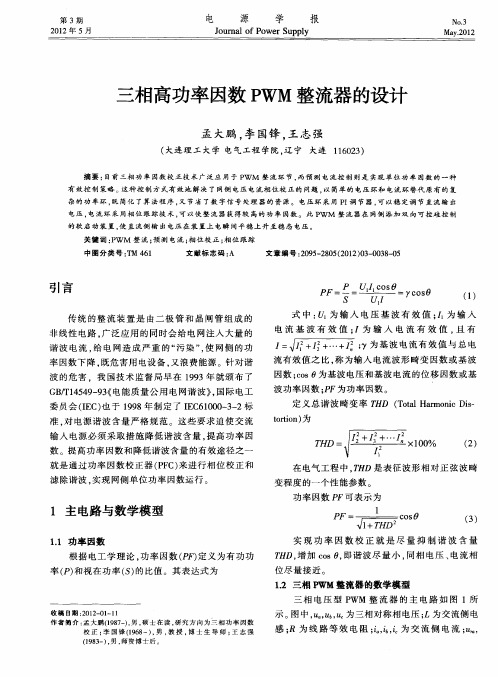
器的拓扑结构如右图所示,
其中在所示的电路中三相电
感L起滤波作用,因此交流 ua ia R
侧电流可近似认为是三相正 弦电流,C为直流侧电容,
ub ib N uc ic
R R
起稳压滤波的作用,当系统
稳定时,可保持直流母线电
压基本不变,故可看作是直
流电压源。R为线路与开关
管的等效电阻,RL为负载。
pW,pV,pU V51+ 的 MPI 接 F F u u 0 0 71C 1 1 0 C1 K 0 01R2 3 C Fu1.0 5 CFu1.0 2 T U O V 5 D 1 N 8 7G 3 N I V F 2 u C 1 1 V51+ F 76 85 u 0 1 3 C3 955PLT 43 21 CCV EGDIRB 0 4 7 R2 7 0 4 7A9U 21 1 J 2NOC MWP
- 直流侧电压
开关管交
流入侧电的压输由此可以看出, PWM整流器的交流回 路的组成有电网电源, 开关管交流侧输入电 压,交流侧电感。
空间矢量PWM(SVPWM)控制策略是根 据整流器空间电压矢量切换来控制整流器的 一种新的控制策略。基本原理就是把三相 PWM整流器输入端电压在复平面上转换为空 间电压矢量,通过不同的开关状态组合构成8 个空间矢量去逼近电压圆,从而形成 SVPWM波。
三相电压型PWM整流器的PI参数设计
三相电压型PWM整流器的PI参数设计
三相电压型PWM整流器的PI参数设计包括以下步骤:
1. 确定控制目标和性能要求:首先需要明确所设计的PI控制器的控制目标和性能要求,比如输出电压稳定性、响应速度、静态误差等。
2. 获取系统模型:需要获取三相电压型PWM整流器的数学模型,包括其传递函数或状态空间模型。
3. 设计比例增益系数Kp:比例系数Kp的作用是根据当前误差信号来产生一个控制信号,控制输出信号的波形。
Kp的大小决定了控制响应的快慢和稳定性,通过试探法或者模拟仿真方法进行选取。
4. 设计积分时间常数Ti:积分时间常数Ti的作用是对误差信号进行积分,以产生一个稳态控制信号。
它的大小决定了控制系统的稳态精度和抗干扰能力,通过试探法或者模拟仿真方法进行选取。
5. 设计PI控制器:将比例增益系数Kp和积分时间常数Ti组合成一个PI控制器的传递函数或状态空间方程,进行数学建模。
6. 对PI控制器进行仿真和调试:将设计好的PI控制器模型进行仿真和调试,检查其性能指标是否满足要求。
如果不满足,则需要重新调整参数。
7. 在实际电路中应用:将设计好的PI控制器应用到实际的三相电压型PWM整流器中,进行验证和调试,保证其稳定性和可靠性。
三相电压型SVPWM整流器的SIMULINK建模与仿真(精)

23三相电压型SVPWM 整流器的SIMULINK建模与仿真毛文喜罗隆福(湖南大学电气与信息工程学院,长沙 410082)摘要:在建立了三相PWM 整流器数学模型的基础上,将双闭环工程设计方法结合矢量控制策略应用于PWM 整流器。
通过MATLAB 的SIMULINK 工具箱得到系统仿真结果,验证了该模型和控制方法的可行性。
关键词:PWM 数学模型空间矢量 SIMULINK中图分类号: TM 461.5 文献标识码:A 文章编号:1003-4862(2007)01-0023-04The Modeling and Simulation of Three-phase Voltage SVPWM RectifierMao Wenxi, Luo Longfu(College of Electrical and Information Engineering Hunan University, Changsha 410082, ChinaAbstract: Based on the mathematical model of PWM rectifier,the dual-close-loop engineering design with vector control is applied in the 3-phase PWM rectifier. The validity of the mathematical model and its control method are confirmed by both MATLAB/SIMULINK simulation and experiment. Key words: PWM ;mathematical model;space vector;SIMULINK1 引言在电能变换中,电压型PWM 整流器(简称“VSR”功率因数可调、输入电流波形为正弦波、可实现能量的双向流动,真正实现了“绿色电能变换”。
三相电压型PWM整流器设计与仿真(精)

1 绪论随着功率半导体器件技术的进步,电力电子变流装置技术得到了快速发展,出现了以脉宽调制(PWM)控制为基础的各种变流装置,如变频器、逆变电源,高频开关电源以及各类特种变流器等,电力电子装置在国民经济各领域取得了广泛的应用,但是这些装置的使用会对电网造成严重的谐波污染问题。
传统的整流方式会无论是二极管不控整流还是晶闸管相控整流电路能量均不能双向传递,不仅降低能源的利用率还会增加一定的污染,主要缺点是:1)无功功率的增加造成了装置功率因素降低,会导致损耗增加,降低电力装置的利用率等;2)谐波会引起系统内部相关器件的误动作,使得电能的计量出现误差,外部对信号产生严重干扰;3)传统的结构,能量只能单向流动,使得控制系统的能量利用率不高,不能起到节能减排的作用。
电网污染的日益严重引起了各国的高度重视,许多国家都已经制定了限制谐波的国家标准,国际电气电子工程师协会(IEEE),国际电工委员会(IEC)和国际大电网会议(CIGRE)纷纷推出了自己的谐波标准。
国际电工学会于1988年对谐波标准IEC555-2进行了修正,欧洲制定IEC1000-3-2标准。
我国国家技术监督局也于1994年颁布了《电能质量公用电网谐》标准(GB/T 14549-93),传统变流装置大多数已不符合这些新的标准,面临前所未有的挑战。
目前,抑制电力电子装置对电网污染的方法有两种:一是设置补偿装置。
通过对已知频率谐波进行补偿,这种方式适用于所有谐波源,但其缺点是只能对规定频率的谐波进行补偿,应用范围受限。
并且当受到电网阻抗特性或其他外界干扰,容易发生并联谐振,导致某些谐波被放大进而使滤波器过载或烧毁;而是对整流器装置本身性能进行改造,通过优化控制策略和参数设置,使网侧输入的电压和电流呈现接近于同相位的正弦波,实现单位功率因数运行即功率因数为1。
目前治理谐波和无功主要是采用功率因数校正技术(PFC技术),由于PWM调制技术引入整流器中,使得整流器能够获得较好的直流电压并且实现网侧电流正弦化,PWM整流技术已经成为治理电网污染的主要技术手段。
三相电压型PWM整流器控制技术综述
三相电压型PWM整流器控制技术综述一、本文概述随着电力电子技术的不断发展,三相电压型PWM整流器作为一种高效、节能的电能转换装置,在电力系统中得到了广泛应用。
该类整流器采用脉宽调制(PWM)技术,通过控制开关管的通断,实现对输入电流波形的精确控制,从而满足电网对谐波抑制、功率因数校正等要求。
本文旨在对三相电压型PWM整流器控制技术进行综述,分析其基本原理、研究现状和发展趋势,为相关领域的研究和实践提供参考。
本文首先介绍了三相电压型PWM整流器的基本结构和工作原理,包括其主电路拓扑、PWM控制技术以及电流控制策略等。
在此基础上,综述了当前国内外在三相电压型PWM整流器控制技术研究方面的主要成果和进展,包括调制策略优化、电流控制算法改进、系统稳定性分析等方面。
本文还对三相电压型PWM整流器在实际应用中所面临的问题和挑战进行了分析和讨论,如电网电压波动、负载变化等因素对整流器性能的影响。
本文展望了三相电压型PWM整流器控制技术的发展趋势,提出了未来研究的方向和重点,包括高效率、高可靠性、智能化控制等方面。
通过对三相电压型PWM整流器控制技术的综述和分析,本文旨在为相关领域的研究和实践提供有益的参考和借鉴。
二、三相电压型整流器的基本原理三相电压型PWM整流器是一种高效、可控的电力电子设备,它采用脉宽调制(PWM)技术,实现对交流电源的高效整流,将交流电转换为直流电。
整流器主要由三相桥式电路、PWM控制器、滤波电路等部分组成。
三相桥式电路是整流器的核心部分,由六个开关管(通常是IGBT 或MOSFET)组成,每两个开关管连接在一起形成一个桥臂,共三个桥臂。
通过控制开关管的通断,可以实现将三相交流电源整流为直流电源。
PWM控制器是整流器的控制核心,它根据输入电压、电流等信号,生成相应的PWM控制信号,控制开关管的通断时间和顺序,从而实现对输出电压、电流等参数的精确控制。
PWM控制器通常采用数字信号处理器(DSP)或微控制器(MCU)等实现,具有高精度、快速响应等特点。
三相PWM整流器的研制
5.仿真效果
仿真一:三相不可控整流
仿真参数:
电网电压 滤波电抗 负载电阻 直流侧电容 380V 50Hz 1.5mH 12.5欧姆 10000uF
仿真波形图:
网侧电流
功率因数 畸变率
由上图可以看出,不可控整流网侧电流波形发生严重畸变 ,畸变率高达29.47%,且网侧功率因数只有0.95。
仿真二:采用基于负载功率前馈的无差拍控制方法的 PWM整流器仿真
2)三相PWM整流器的无差拍控制方法
us Ls
V1
V3
Rs A
is
B
V4
V6
V5
C V2
C1
负
o udc 载
C2
三相逆变器本质上是三个半桥逆变器的并 联模式,三个半桥逆变器共用一个直流侧电压。
对每个半桥逆变器来说,有两种输出模式:
当上开关管开通且下开关管关闭时,逆变器输 出电压为udc/2;当上开关管关闭且下开关管开 通时,逆变器输出电压为-udc/2;
为了解决高频开关电源前级不控整流引起的谐波污染和功率因数低等 问题,应东莞力源整流设备有限公司的邀请,项目组将研制一套40kW的三 相PWM整流器,改善开关电源的电能质量水平。
2.PWM整流电路及其基本原理分析
PWM整流电路主要分为电压型和 电流型两种,目前电压型PWM整流电 路较多。
单相PWM整流电路:
3.利用2、3、4月份进行程序的进一步调试与完善,包括液晶 显示,并考虑与开关电源后级DC/DC变换器连接并网的难点与 问题;
谢谢各位!
请罗老师和各位同门 批评指正!
右图a和b分别为单相半桥和全桥 PWM整流电路。全桥电路包括一对开 关臂,而半桥电路只有一个开关臂, 并外一臂由两个电容串联组成,其电 容中点和交流电源连接。
三相PWM整流器控制器设计(精)
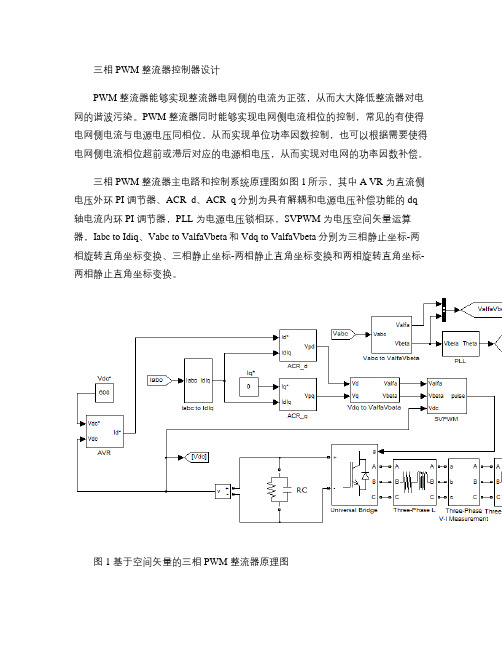
三相PWM 整流器控制器设计PWM 整流器能够实现整流器电网侧的电流为正弦,从而大大降低整流器对电网的谐波污染。
PWM 整流器同时能够实现电网侧电流相位的控制,常见的有使得电网侧电流与电源电压同相位,从而实现单位功率因数控制,也可以根据需要使得电网侧电流相位超前或滞后对应的电源相电压,从而实现对电网的功率因数补偿。
三相PWM 整流器主电路和控制系统原理图如图1所示,其中A VR 为直流侧电压外环PI 调节器、ACR_d、ACR_q分别为具有解耦和电源电压补偿功能的dq 轴电流内环PI 调节器,PLL 为电源电压锁相环,SVPWM 为电压空间矢量运算器,Iabc to Idiq、Vabc to ValfaVbeta和Vdq to ValfaVbeta分别为三相静止坐标-两相旋转直角坐标变换、三相静止坐标-两相静止直角坐标变换和两相旋转直角坐标-两相静止直角坐标变换。
图1 基于空间矢量的三相PWM 整流器原理图根据开关周期平均值概念、三相电压型PWM 整流器开关函数表等,可得到三相电压型PWM 整流器在dq 坐标下微分方程形式和等效电路形式的开关周期平均模型。
经过dq 轴电流解耦和电源电压补偿的控制系统结构图如图2所示,其中小写的变量表示该变量的开关周期平均值,大写的变量表示该变量在工作点的值。
v dc d dcq图2 基于dq 轴电流解耦和电源电压补偿的控制系统结构图对解耦和电源电压补偿之后的dq 轴等效电路进行工作点附近的小信号分析,即可得到小信号下的传递函数如式(1、(2)和(3)所示,其中L 、R 分别为交流侧的滤波电感及其等效电阻,C 为直流侧滤波电容,Dd 为d 轴在工作点的占空比。
~i d (s αd (s ~i q (s αq (s ~v dc (s i d (sV dc(13Ls +3R V dc(2 =-3Ls +3R RD d(3) =-RCs +1=-有了对象的传递函数,根据控制系统校正原则就可整定dq 轴电流环和直流侧电压外环PI 调节器的参数。
三相电压型PWM整流器及其控制的设计_毕业论文 精品
华东交通大学理工学院Institute of Technology.East China Jiaotong University毕业论文Graduation Thesis(2009 —2013 年)题目:三相电压型PWM整流器及其控制的设计分院:电气与信息工程分院专业:电气工程及其自动化1摘要传统的二极管不可控整流器和晶闸管半控整流器输出的直流电压存在不同程度的波动,需要体积庞大的滤波装置、电网电流畸变率大、谐波含量大等缺点。
直流电压波动太大给负载带来了不良影响、滤波装置体积庞大会导致整流器笨重并且设备占地面积增大、电网电力畸变率大谐波含量高从而需要无功补偿装置,这些都增大了传统整流器的设计与运行成本。
本文从实际出发,首先介绍了三相电压型PWM整流器的发展史,电路的拓扑结构,以及电路的控制策略。
深入的研究了PWM整流器的数学模型,得到了一些有用的结论,重点研究了PWM整流器的控制策略,即SVPWM调制策略,设计了相应的控制器。
在MATLAB中搭建了仿真模型,仿真结果表明了所建立的控制系统是有效的,能够稳定三相电压型PWM整流器直流侧的直流电压,在负载突变后,也能很好的调节的直流电压保持不变,并且电网电流与电压同相,实现了单位功率因数运行。
关键字:PWM整流;SVPWM调制;仿真;单位功率因数AbstractTraditional controlled rectifier diode and thyristor half controlled rectifier output of the DC voltage varying degrees of volatility, the need for bulky filtering device, grid current distortion, harmonic content and other shortcomings. DC voltage is too volatile to the load brought adverse effects the filtering device bulky lead to rectifier bulky and equipment covers an area of increased, Power Grid distortion rate of high harmonic content and reactive power compensation device, which are increased conventional rectifier design and operating costs.From reality, this paper first introduces the history of the development of the three-phase voltage-type PWM rectifier circuit topology, and circuit control strategy. In-depth study of the mathematical model of PWM rectifier, got some useful conclusions, focus on the PWM rectifier control strategy, SVPWM modulation strategy, design the controller. In MATLAB to build a simulation model, the simulation results show that the established control systems are effective, stable three-phase voltage-type PWM rectifier DC side DC voltage, load mutation, can be well regulated DC voltage remains unchanged and the same phase of the grid current and voltage, to achieve unity power factor operation.Key words: PWM rectifier; SVPWM modulation; simulation; unity power factor3目录中文摘要 (1)英文摘要 (2)目录 (3)第1章绪论 (1)1.1 课题的研究背景与意义 (1)1.1.1 谐波的危害和抑制 (1)1.1.2 功率因数校正技术 (2)1.2 PWM整流器国内外研究现状 (2)1.2.1 PWM整流器的分析与建模 (3)1.2.2 三相PWM整流器控制技术的研究 (3)1.2.3 PWM整流器拓扑结构的研究 (3)1.2.4 PWM整流器系统控制策略的研究 (3)1.3 电压型PWM整流器的控制技术 (4)1.4 本文的主要研究内容和重点 (4)第2章三相PWM整流器的原理及其数学模型 (5)2.1 PWM整流器的基本原理 (5)2.1.1 三相PWM整流器拓扑结构 (5)2.2.1 ABC静止坐标系下的低频数学模型 (7)2.2.2 两相坐标系下的低频数学模型 (9)2.2.3 PWM整流器高频通用数学模型 (11)2.2.4 两相dq坐标系的PWM整流器高频数学模型 (14)第3章三相电压型PWM整流器的控制 (17)3.1电压型PWM整理器的电压空间矢量控制技术 (17)3.2 SVPWM算法在MATLAB中的实现 (17)3.2.1 参考电压矢量所在扇区N的判断 (18)3.2.2 不同扇区两相邻电压空间矢量的作用时间 (22)第4章三相电压型PWM整流器的建模和仿真 (25)4.1 三相VSR直流电压控制 (25)4.2PWM整流器整体仿真 (27)第五章结论与展望 (29)参考文献 (30)第1章绪论1.1 课题的研究背景与意义近十几年来,随着电力电子装置的谐波污染受到愈来愈广泛的重视,随着用电设备谐波标准和电机系统节能工程的推广实施,必将会很大程度上促进对PWM 整流器的发展。
三相电压型可逆PWM整流器设计(精)

三相电压型可逆PWM整流器设计姓名:**********学号:**********班级:自动化学校:华中科技大学三相电压型PWM整流器一、三相PWM整流器的拓扑结构及其工作原理1、拓扑结构三相半桥PWM整流电路图.1上图为三相半桥电压型PWM整流器拓扑结构,其交流侧采用三相对称的无中线连接方式,并采用6只功率开关,这是一种最常用的三相PWM整流器,通常所谓的三相桥式电路即指三相半桥电路。
三相半桥VSR较适用于三相电网平衡系统。
当三相电网不平衡时,其控制性能将恶化,甚至使其发生故障。
为克服这一不足可采用三相全桥VSR设计,其拓扑结构如下图所示。
其特点是:公共直流母线上连接了三个独立控制的单相全桥VSR,并通过变压器联接至三相四线制电网。
因此,三相全桥VSR实际上是由三个独立的单相全桥VSR组合而成的,当电网不平衡时,不会严重影响PWM整流器控制性能,由于三相全桥电路所需的功率管是三相半桥电路的一倍,因而三相全桥电路一般较少采用。
三相全桥PWM整流电路图.22、工作原理2.1 PWM整流器的模型电路如下:PWM 整流器电路由交流回路、功率开关管桥路以及直流回路组成。
其中交流回路包括交流电动势 e 以及网侧电感 L等;功率开关管桥路为电压型桥路组成。
当不计功率开关管桥路损耗时,由交、直流侧功率平衡关系得:通过对交流侧进行控制就可以控制直流侧,PWM整流器的运行状态以及控制原理如下:稳态时PWM整流器交流侧的矢量关系如下,1、纯电感特性运行2、正阻特性运行0'0'C0'C0'CC3、纯电容特性运行4、负阻特性运行其中:E为交流电网电动势矢量,V为交流侧电压矢量,VL为交流侧电感电压矢量,I为交流侧电流。
(1) 电压矢量 V 端点在圆轨迹 AB 上运动时, PWM 整流器运行于整流状态。
此时,PWM 整流器需从电网吸收有功及感性无功功率,电能将通过 PWM 整流器由电网传输至直流负载。
三相PWM整流器研究_图文(精)

毕业设计(论文)题目 PWM整流器的设计学院(系):专业班级:学生姓名:指导教师:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。
本人完全意识到本声明的法律后果由本人承担。
作者签名:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在10年解密后适用本授权书2、不保密囗。
(请在以上相应方框内打“√”)作者签名:年月日导师签名:年月日本科生毕业设计(论文任务书学生姓名:专业班级:指导教师工作单位设计(论文题目: PWM整流器的设计设计(论文)主要内容:熟悉整流的原理,对整流技术进行综述、比较,并设计出整流器硬件电路和软件程序。
要求完成的主要任务:(1)外文资料翻译不少于20000印刷符;(2)查阅相关文献资料(中文15篇,英文3篇);(3)掌握整流的原理;(4)撰写开题报告;(5)熟悉整流技术国内外的研究现状、目的意义;(6)对整流技术进行综述、比较;(7)计出整流器硬件电路和软件程序。
;(8)绘制的电气图纸符合国标;(9)撰写的毕业设计(论文)不少于10000汉字。
必读参考书:[1] 王兆安,黄俊.电力电子技术.第4版.北京:机械工业大学出版社,2007[2] 杨荫福,段善旭,朝泽云.电力电子装置及系统.北京:清华大学出版社,2006[3]张崇巍,张兴.PWM整流器及其控制.北京:机械工业大学出版社,2003指导教师签名系主任签名院长签名(章本科学生毕业设计(论文)开题报告20世纪90年代发展起来的智能型功率模块(IPM开创了功率半导体开关器件新的发展方向。
三相电压型PWM整流器双闭环系统设计与仿真(精)
ev(9)Tv=4Tev
4三相VSR控制系统分析与仿真
运用MATLAB/SIMULINK仿真软件对系统进行仿真分析,
并且验证上述双闭环系统调节器整定方法的可行性。
根据上述双闭环系统调节器的整定方法可分别算出电流内环以及电压外环调节器参数,并由此可对系统进行仿真分析。
图6中的响应曲线为“模最佳”电压外环整定曲线与典型Ⅱ系统整定曲线的对比。由图中可看出,由“模最佳”整定法设计调节系统不仅具有良好的抗扰动性能,而且较快的动态响应速度。
[3]GregHoglund,JamesButler.Rootkits:SubvertingtheWindowskernel[M].AddisonWesleyProfessional,2005
[4]JeffreyR.ProgrammingapplicationforMicrosoftWindows[M].MicrosoftPress,1999.
通过仿真试验可看出三相电压型pwm整流器电压内环采用典型i型系统调节方式进行的调节器参数整定对系统电模最佳整定法得流具有较快的跟踪能力而电压外环通过到的系统响应不仅能够满足系统设计要求而且相比采用典型i阶系统整定法得到的调节系统具有更良好的抗扰动性能动态响应速度也得到了明显的改善
科技信息
博士・专家论坛
式中,Kip、——电流内环比例调节增益和积分调节增益KiI—
1引言
由于全控器件的不连续性以及系统模型的电流耦合性,
给系统设计带来了困难。因此,本文根据文献[1]中所提到的前馈解耦控制策略,首先对三相电压型PWM整流器(VSR)进行解耦,得到dq旋转坐标系中的电流解耦模型。
其次,三相VSR系统的控制有多种方式,其中双闭环控制系统由于控制结构简单、控制性能优良等优点被广泛采用。因此,本文根据三相VSR系统设计要求,提出了较为可行的双闭环系统设计方案并进行仿真验证。
基于DSP的三相电压型PWM整流器控制系统设计
基于DSP的三相电压型PWM整流器控制系统设计随着电力电子技术的快速发展,三相电压型PWM整流器在工业生产中得到了广泛应用。
本文将基于数字信号处理(DSP)技术,设计一个三相电压型PWM整流器控制系统。
首先,我们需要了解三相电压型PWM整流器的基本原理。
该型整流器的输入为三相交流电源,输出为直流电压。
其控制系统的目的是通过改变整流器的开关状态,调节输出的直流电压和电流。
在设计整流器控制系统之前,首先要确定系统的需求和性能指标。
常见的性能指标包括输出电压稳定性、输出电流波形质量和响应速度等。
接下来,我们可以开始设计整流器控制系统。
整体上,该系统可以分为三个部分:传感器模块、控制模块和功率器件模块。
传感器模块用于采集整流器的输入和输出信号,并将其转化为数字信号。
传感器模块中常用的传感器有电流传感器和电压传感器。
电流传感器可以测量整流器的输出电流,并将其转化为电压信号。
电压传感器可以测量整流器的输入和输出电压,并将其转化为电压信号。
这些信号将通过模数转换器(ADC)转化为数字信号,供DSP进行后续处理。
控制模块是整个系统的核心,主要负责计算控制算法,并生成PWM信号。
在控制模块中,我们将运用DSP的高性能计算能力,实现整流器的高精度控制。
常用的控制算法有比例积分(PI)控制算法和模型预测控制(MPC)算法。
比例积分控制算法可以根据误差信号调节PWM占空比,实现系统的闭环控制。
模型预测控制算法则采用预测模型,通过优化计算,实现系统的最优控制。
功率器件模块负责驱动整流器的功率器件,控制整流器的开关状态。
常用的功率器件有晶闸管(SCR)、双向可控硅(TRIAC)和金属氧化物半导体场效应晶体管(MOSFET)等。
功率器件的驱动和保护电路需要根据实际情况进行设计。
设计完成后,需要进行系统的仿真和验证。
我们可以采用MATLAB/Simulink等软件进行仿真,验证系统的性能和稳定性。
根据仿真结果,可以进一步优化控制算法和参数,提高整流器的控制精度。
三相高功率因数PWM整流器的设计
的软 启 动 装 置 。 直 流侧 输 出 电压 在 装 置 上 电 瞬 间平 稳 上 升 至稳 态 电压 。 使
关 键 词 : W M 整 流 : 测 电流 ; 位 校 正 ; 位 跟 踪 P 预 相 相
中 图分 类 号 :M 4 1 T 6
文 献 标 志 码 : A
文 章 编 号 :0 5 2 0 (02 0 — 0 8 0 2 9 — 85 2 1 )3 0 3 — 5
摘要 : 目前 三相 功 率 因数 校 正技 术 广 泛应 用 于 P WM 整 流环 节 , 预 测 电流 控 制 则 是 实现 单 位 功 率 因数 的 一种 而
有 效 控 制 策略 。 这种 控 制 方式 有 效 地 解 决 了 网侧 电压 电流 相位 校 正 的 问题 , 简单 的 电压 环 和 电 流环 替 代 原 有 的 复 以
则 可 由 。 以及 2个 零 矢 量 和 合 成 得 ,
到 。根据 平行 四边形 原则 , 得
‘ +
』 j
标 系 下 的 电压 、 流 , 过 式 ( ) 电 通 9 可计 算 出整流 器 输
\0 (2 ) 1/
‘ =
入 电压 , 再应用 空 间矢量 合成 ,可 得到 三个 开 “ 关 函数 的 信 号 S,6 。5, ,进 而 驱 动 6个 I B S G T的通
,, 6c
[ 一[[ c [ 乏 9 ; 詈] ] ] ] = 一
C ud ̄ d 出
一 + )t — = 一
() 1 0
其 中 ,三 相静 止 a c坐标 系 到两 相 静 止 卢坐 b
标 系 的 转 换 矩 阵 为
1 —— —1
— — — —
1
—
三相PWM整流器H_∞鲁棒控制器设计

若 式 ( ) 正 定 解 P> 可 得 到 所 设 计 的 H 4有 0, 鲁棒控制器为 :
K( ) ( 。 ~( P D 7 s = D。 : Bf + c ) ) () 5 根据三相 P WM 整 流 器 的 特 点 , 取 状 态 变 量 选
rt
为 [ 2 4, l , =J 一 )t 3 : l 3 】 其中 = d, = 2 (
明了所提方 法的 可行性和 有效 性 。 ・
文 章 编 号 :O O lO ( 0 10 - 0 4 0 lO - O X 2 1 )6 0 6 - 3
关键 词 : 整流 器 ;H 控制 ;鲁 棒控制 器
中圈 分 类 号 :M4 1 T 6 文 献标 识 码 : A
De i n f H Ro us nt o l r f r Thr e p s sg o b t Co r le o e ・ ha e PW M c i e Re tf r i
Z N i A u - n H N i ,Y u— e HA G Hu 。T N G oj ,Z A G X a u o URi n w
( h aU i r o nn n eh ooy uh u2 10 ,C i ) C i nv s fMiigad Tc nl ,X zo 2 0 8 hn n e g a
摘要: 相 P 三 WM 整 流 器 普 遍 采 用 双 闭环 P 控 制 策 略 。在 此 针 对 电流 环 特 点 , 计 了一 种 H I 设 鲁 棒 控 制 器 。基 于
d q轴旋 转坐标 系下 P . WM 整流 器 的数学模 型 , 选择适 当的状态 参数 , 立 了满 足 H 建 鲁 棒控 制标准 型 的增广状 态方 程 。 据 H 依 鲁棒 控制 的原理 , 定义评 价信 号 , 通过 求解 R cai 等式 , 到 H ict不 得 鲁 棒控制 器 。 真和 实验 证 仿
基于DSP的三相电压型PWM整流器控制系统设计(精)

基于DSP的三相电压型PWM整流器控制系统设计张纯江1,2,王英1,赵清林1,刘彦民1(1.燕山大学,秦皇岛066004;2.哈尔滨工业大学,哈尔滨150006摘要:介绍了一种由DSP控制的三相PWM整流器的新型间接电流控制系统,提出了新型相位幅值控制方法,以滞后角ξ作为输入变量。
采用TMS320F240为核心控制芯片,实现控制算法和空间矢量的数字算法。
实验结果表明,系统可以按照给定调节输出直流电压并且能够实现单位功率因数。
关键词:整流器;脉宽调制/数字信号处理器;相位幅值控制中图分类号:TM46文献标识码:A文章编号:1000-100X(200206-0045-03Control System Design of the Three2phase Voltage2fed R ectif ier B ased on DSP ZHAN G Chun2jiang1,2,WAN G Y ing1,ZHAO Qing2lin1,L IU Yan2min1(1.Yanshan U niversity,Qin Huangdao066004,China;2.Harbin Institute of Techniology,Harbin150006,ChinaAbstract:This paper presents a new idea of indirect current control s ystem of three2phase PWM rectifier based on DSP.A new phase2amplitude control method is proposed.The lag angleξis regarded as the input variable.The cont rol algorithm and the digital algorithm of the space vector control are im plemented withTMS320F240chip.Experiments show that the system realizes the unity power factor and regulates output DC voltage according to the voltage reference.K eyw ords:rectifier;PWM;DSP;phase2amplitude control1引言三相整流器在中等功率及大功率电能变换中应用很广,通常作为逆变电路或是大型U PS电源的前级直流电源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三相PWM 整流器控制器设计
PWM 整流器能够实现整流器电网侧的电流为正弦,从而大大降低整流器对电网的谐波污染。
PWM 整流器同时能够实现电网侧电流相位的控制,常见的有使得电网侧电流与电源电压同相位,从而实现单位功率因数控制,也可以根据需要使得电网侧电流相位超前或滞后对应的电源相电压,从而实现对电网的功率因数补偿。
三相PWM 整流器主电路和控制系统原理图如图1所示,其中A VR 为直流侧电压外环PI 调节器、ACR_d、ACR_q分别为具有解耦和电源电压补偿功能的dq 轴电流内环PI 调节器,PLL 为电源电压锁相环,SVPWM 为电压空间矢量运算器,Iabc to Idiq、Vabc to ValfaVbeta和Vdq to ValfaVbeta分别为三相静止坐标-两相旋转直角坐标变换、三相静止坐标-两相静止直角坐标变换和两相旋转直角坐标-两相静止直角坐标变换。
图1 基于空间矢量的三相PWM 整流器原理图
根据开关周期平均值概念、三相电压型PWM 整流器开关函数表等,可得到三相电压型PWM 整流器在dq 坐标下微分方程形式和等效电路形式的开关周期平均模型。
经过dq 轴电流解耦和电源电压补偿的控制系统结构图如图2所示,其中小写的变量表示该变量的开关周期平均值,大写的变量表示该变量在工作点的值。
v dc d dc
q
图2 基于dq 轴电流解耦和电源电压补偿的控制系统结构图
对解耦和电源电压补偿之后的dq 轴等效电路进行工作点附近的小信号分析,即可得到小信号下的传递函数如式(1、(2)和(3)所示,其中L 、R 分别为交流侧的滤波电感及其等效电阻,C 为直流侧滤波电容,Dd 为d 轴在工作点的占空比。
~
i d (s αd (s ~
i q (s αq (s ~
v dc (s i d (s
V dc
(1
3Ls +3R V dc
(2 =-
3Ls +3R RD d
(3) =-
RCs +1=-
有了对象的传递函数,根据控制系统校正原则就可整定dq 轴电流环和直流侧电压外环PI 调节器的参数。
由于校正原则不是唯一的,不同的设计准则可获得不同的调节器参数,因此通过仿真来了解校正效果就显得非常有意义。
而且对象参数的不精确性使得调节器的设计只能是近似的,通过仿真来了解调节器参数的变化规律就更显得必要。
以将电流环校正成典型I 性系统为例,考虑到电流调节器输出到形成PWM 整流器交流侧dq 轴电压变化存在PWM 周期延迟、以及存在电流滤波器时间延迟等因素构成的等效延迟时间T si ,dq 轴电流解耦和电源电压补偿后的电流环结构如图3所示。
只要将ACR d 的零点与W 2的极点对消,即可将电流环校正成典型I 性系统,由此可获得ACR 的积分时间常数τi ,即
τi =L/R (4
取电流环的阻尼比为0.707时,可使电流环有足够的动态响应能力和抑制超调能力,由此可获得ACR 的比例系数K i ,即(Ki /τi Vdc T si =0.5,则
K i =0.5τi / (Vdc T si (5
图3 d轴电流环等效结构图
校正成典型I 系统的电流环可以近似为时间常数为2T si 的一阶惯性环节,因此可得电压环近似等效结构图如图4所示,其中T sv 为综合了电流环等效时间常数、以及电压滤波器时间延迟等因素构成的等效延迟时间。
这样设计直流侧电压环就变得非常容易,可以将直流侧对象近似为积分环节,然后将电压环校正成典型II 系统,也可以将电压环PI 调节器的零点与直流侧对象的极点对消,然后将电压环校正成典型I 系统。
图4 电压环等效结构图
II 系统(将直流负载近似为积分环节D d /(Cs),根据典型II 型系统的常见设计规则,中频带宽h 一般设计为5,即τv /Tsv =5,截止频率介于1/(5Tsv ~1/(Tsv 之间。
但由于期望的电压环截止频率ωcv 应该小于(1/5~1/10直流侧纹波频率(三相整流电路直流侧纹波频率为2π(6电源频率),对50Hz 电网,ωcv <(1/5~
1/10600π),但1/(Tsv 太大,无法满足要求,故将电压环校正成典型II 系统不合适。
将τv 设计成与R L C 相等,则可将电压环校正成典型I 型系统。
因此有
τv =RL C (6
若将电压环校正成典型
图1所示系统中,交流侧滤波电感L=5mH,其等效电阻R=0.01Ω,电源相电压有效值为220V ,频率为50Hz, 直流侧滤波电容C=2200uF,负载等效电阻R L
=100Ω, 直流侧电压给定是600V ,功率器件开关频率为10KHz ,电流环控制周期为50ms ,电压环控制周期为500ms 。
不计滤波器时间常数时,电流环中的T si 等于功率器件的开关周期,电压环中的T sv 等于2T si 。
根据这些参数即可算出,电流调节器的积分时间常数τi =5e-3/1e-2=0.5,电流调节器的比例系数K i =0.5*0.5 /
(33*600*0.1e-3=0.13;电压调节器的积分时间常数τv =5 *2*0.1e-3=1e-3,K v
=(6/50*1e-3*2200e-6/( 0.9* (2*0.1e-32= 7.3。
电流环原始对象、电流调节器、校正后的开环传递函数波特图分别如图5中的曲线1、2、3所示,图5可见校正后的电流环开环传递函数的截止频率约为
5000rad/s,小于(1/5~1/10)功率器件开关频率,相
位稳定裕量约63, 符合要求。
校正后的电流环闭环阶跃响应曲线如图6和图7所示,图6和图7的实验是在断开电压环的输出(即电流环d 轴电流给定),单独在电流环d 轴电流给定出施加一个阶跃信号(0.5s 时由8A 阶跃至9A )的情况下获得仿真实验波形,
图5 电流环波特图
图6 电流环闭环阶跃响应(id
图7 电流环闭环阶跃响应
校正完成后的部分仿真实验波形如图5和图6所示,各变量对应关系分别为:i d *-d 轴电流给定、i d - d
轴电流、v dc -直流侧电压、u A -电源A 相电压、i A -交流侧A 相电流和i ABC -交流侧三相电流。
图5中0.3s 处电源电压突降5%,由图5可见d 轴电流主令自动增大,以维持直流侧电压稳定,d 轴电流跟随良好,直流侧电压最大降落约0.16%且在80ms 内恢复,可见电压环抗扰能力良好。
图6中0.5s 处直流负载突增(负载电阻由100Ω突变为67Ω),由图6(a可见,交流侧三相电流和三相电源电压完全同相位,电流波形正弦度良好(THD 约为5%),负载变化后电流波形依然正常;由图6(b可见,负载突增后d 轴电流主令自动增大,以维持直流侧电压稳定,d 轴电流跟随良好,直流侧电压最大降落约0.67%且在80ms 内恢复,电压环抗扰能力良好。
图5 电源电压突降情况下的波形
(a 交流波形 (b 直流波形
图6 负载突增情况下的波形。