学做智能车,挑战飞思卡尔之9技术报告34页PPT
飞思卡尔智能车大赛技术报告
第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告学校:中北大学伍名称:ARES赛队员:贺彦兴王志强雷鸿队教师:闫晓燕甄国涌关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:2014-09-15日摘要本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。
机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。
硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。
软件上以经典的PID算法为主,辅以小规Bang-Bang算法来控制智能车的转向和速度。
在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅助调试。
关键字:智能车摄像头控制器算法。
目录1绪论 (1)1.1 竞赛背景 (1)1.2国内外智能车辆发展状况 (1)1.3 智能车大赛简介 (2)1.4 第九届比赛规则简介 (2)2智能车系统设计总述 (2)2.1机械系统概述 (3)2.2硬件系统概述 (5)2.3软件系统概述 (6)3智能车机械系统设计 (7)3.1智能车的整体结构 (7)3.2前轮定位 (7)3.3智能车后轮减速齿轮机构调整 (8)3.4传感器的安装 (8)4智能车硬件系统设计 (8)4.1XS128芯片介绍 (8)4.2传感器板设计 (8)4.2.1电磁传感器方案选择 (8)4.2.2电源管理模 (9)4.2.3电机驱动模块 (10)4.2.4编码器 (11)5智能车软件系统设 (11)5.1程序概述 (11)5.2采集传感器信息及处理 (11)5.3计算赛道信息 (13)5.4转向控制策略 (17)5.5速度控制策略 (19)6总结 (19)6.1效果 (20)6.2遇到的问题以及解决办法 (20)6.3队员之间的合作很重要 (21)附录 (22)源程序 (23)1绪论1.1 竞赛背景随着经济发展,道路交通面临新的问题和新的挑战。
飞思卡尔智能汽车设计技术报告
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:武汉科技大学队伍名称:首安二队参赛队员:韦天肖杨吴光星带队**:**0敏I关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:II目录第一章引言 (1)1.1 概述 (1)1.2 内容分布 (1)第二章系统总体设计 (2)2.1 设计概述 (3)2.2 控制芯片的选择 (3)2.3 线性 CCD 检测的基本原理 (3)2.3 系统结构 (5)第三章机械系统设计 (7)3.1 底盘加固 (7)3.2 轮胎处理 (7)3.3 四轮定位 (8)3.4 差速器的调整 (12)3.5 舵机的安装 (13)3.6 保护杆的安装 (15)3.7 CCD的安装 (16)3.8 编码器的安装 (17)3.9 检测起跑线光电管及加速度计陀螺仪的安装 (18)第四章硬件系统设计 (19)4.1 最小系统版 (20)4.2 电源模块 (21)4.3 CCD模块 (22)4.4 驱动桥模块 (23)4.5 车身姿态检测模块 (24)4.7 测速模块 (24)4.8 OLED液晶屏及按键、拨码 (25)第5章程序设计 (27)III5.1 阈值计算 (27)5.2 赛道判别 (28)5.3 舵机控制 (28)5.4 电机控制 (29)5.5 PID 介绍 (30)第六章相关工具介绍 (32)6.1 软件开发平台 (32)6.2 蓝牙模块及超级示波器 (35)第七章车模主要技术参数说明 (37)第八章总结 (38)IV第一章引言1.1 概述全国大学生“飞思卡尔杯”智能汽车竞赛,以“立足培养、重在参与、鼓励探索,追求卓越”为宗旨,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神。
飞思卡尔智能车技术报告
第六届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:队伍名称:参赛队员:带队教师:关于技术报告和研究论文使用授权的说明本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要随着现代科技的飞速发展,人们对智能化的要求已越来越高,而智能化在汽车相关产业上的应用最典型的例子就是汽车电子行业,汽车的电子化程度则被看作是衡量现代汽车水平的重要标志。
同时,汽车生产商推出越来越智能的汽车,来满足各种各样的市场需求。
本文以第六届全国大学生智能车竞赛为背景,主要介绍了智能车控制系统的机械及硬软件结构和开发流程。
机械硬件方面,采用组委会规定的标准 A 车模,以飞思卡尔半导体公司生产的80管脚16 位单片机MC9S12XS128MAA 为控制核心,其他功能模块进行辅助,包括:摄像头数据采集模块、电源管理模块、电机驱动模块、测速模块以及无线调试模块等,来完成智能车的硬件设计。
软件方面,我们在CodeWarrior IDE 开发环境中进行系统编程,使用增量式PD 算法控制舵机,使用位置式PID 算法控制电机,从而达到控制小车自主行驶的目的。
另外文章对滤波去噪算法,黑线提取算法,起止线识别等也进行了介绍。
关键字:智能车摄像头图像处理简单算法闭环控制无线调试第一章引言飞思卡尔公司作为全球最大的汽车电子半导体供应商,一直致力于为汽车电子系统提供全范围应用的单片机、模拟器件和传感器等器件产品和解决方案。
飞思卡尔公司在汽车电子的半导体器件市场拥有领先的地位并不断赢得客户的认可和信任。
其中在8 位、16 位及32 位汽车微控制器的市场占有率居于全球第一。
飞思卡尔公司生产的S12 是一个非常成功的芯片系列,在全球以及中国范围内被广泛应用于各种汽车电子应用中。
学做智能车,挑战飞思卡尔之9技术报告共36页文档
•
6、黄金时代是在我们的前面,而不在 我们的 后面。
பைடு நூலகம்
•
7、心急吃不了热汤圆。
•
8、你可以很有个性,但某些时候请收 敛。
•
9、只为成功找方法,不为失败找借口 (蹩脚 的工人 总是说 工具不 好)。
•
10、只要下定决心克服恐惧,便几乎 能克服 任何恐 惧。因 为,请 记住, 除了在 脑海中 ,恐惧 无处藏 身。-- 戴尔. 卡耐基 。
▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
36
学做智能车_挑战飞思卡尔之智能车制作 共65页
--邹玉龙
根据车模检测路径方案不同分为
• 光电组 • 摄像头组 • 电磁组
•光电组
车模通过采集赛道上少数孤立点反射亮 度进行路经检测的属于光电组。
Hale Waihona Puke •摄像头组车模通过采集赛道图像(一维、二维) 或者连续扫描赛道反射点的方式进行进行 路经检测的属于摄像头组
•电磁组
车模通过感应由赛道中心电线产生的交 变磁场进行路经检测的属于电磁组
第六届比赛现场视频
调试工具
• 串口 • 蓝牙 • 无线 • 液晶 • 薄码开关 • 键盘 • 上位机 • 其它……
拨码开关
蓝牙模块
无线模块
液晶模块
液晶显示
上位机和下位机
• 上位机是指人可以直接发出操控命令的计
算机,一般是PC,屏幕上显示各种信号变 化(液压,水位,温度等)。下位机是直 接控制设备获取设备状况的计算机,一般 是PLC/单片机之类的。
转角与脉宽
转角与脉宽
直流电机
直流电机模型
电机驱动
编码器
• 旋转编码器 • 光电编码器
• 旋转编码器是一种采用光电等方法将轴的
机械转角转换为数字信号输出的精密传感
器,分为增量式旋转编码器和绝对式旋转 编码器。
• 光电式编码器的工作原理如下:随转轴一
起转动的脉冲码盘上有均匀刻制的光栅,
• 电磁车视频
车模运动控制
• 运行速度控制
– 控制对象:运行电机 – 控制方法:线性调压、PWM驱动
• 转向控制
– 控制对象:舵机(R/C Servo) – 控制方法:PWM脉宽 → 舵盘角位
系统初始化
系统参数 手动调节
处理数字摄像头 采集数据
飞思卡尔智能车比赛技术报告
第三届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告学校:北京理工大学队伍名称:傲雄车队参赛队员:刘鑫杨磊韩立博带队教师:张幽彤冬雷关于技术报告和研究论文使用授权的说明本人完全了解第三届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:刘鑫杨磊韩立博带队教师签名:张幽彤日期:2008.8.20摘要本文介绍了北理傲雄车队队员们在准备第三届Freescale智能车大赛过程中的工作成果。
智能车的硬件平台采用带MC9S12DP512处理器的S12环境,软件平台为CodeWarrior IDE 4.6开发环境,车模采用大赛组委会统一提供的1:10 的仿真车模。
文中介绍了智能小车控制系统的软硬件结构和开发流程。
整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。
为了提高智能赛车的行驶速度和可靠性,试验了多套方案,并进行升级,结合Labview 仿真平台进行了大量底层和上层测试,最终确定了现有的系统结构和各项控制参数。
关键字:智能车,激光管,PID控制第一章引言 11.1 赛事介绍 11.2 方案介绍 11.3 技术报告内容安排 2第二章技术方案概要说明3第三章机械设计43.1 PCB板的安装 43.2 前轮参数调整 53.3 舵机的升高方案 63.4 齿轮传动机构调整73.5 速度传感器的安装固定73.6. 后轮差速机构调整8第四章硬件电路设计94.1 S12单片机最小系统94.2 路线识别电路设计124.3 电源管理电路设计144.4 电机驱动电路设计154.5 串行通讯接口电路154.6 速度检测模块164.7 现场调试模块17第五章软件设计195.1 主程序设计 195.2 总体控制流程图 195.3 工作原理205.4.1 PID控制205.4.2 PID参数的整定 215.5 小车控制策略225.6 软件开发环境22第六章模型车各项参数266.1 车模基本尺寸266.2 电路功耗及电容总容量266.3 传感器及伺服电机数量266.4 赛道信息检测精度、频率 26第七章结论277.1 本系统的所具有的特点277.2 本系统存在的问题277.3 本系统可行的改进措施28参考文献29附录A 模型车控制主程序代码I第一章引言1.1 赛事介绍受教育部高等教育司委托,高等学校自动化专业教学指导分委员负责主办全国大学生智能车竞赛。
飞思卡尔杯智能车竞赛报告总结
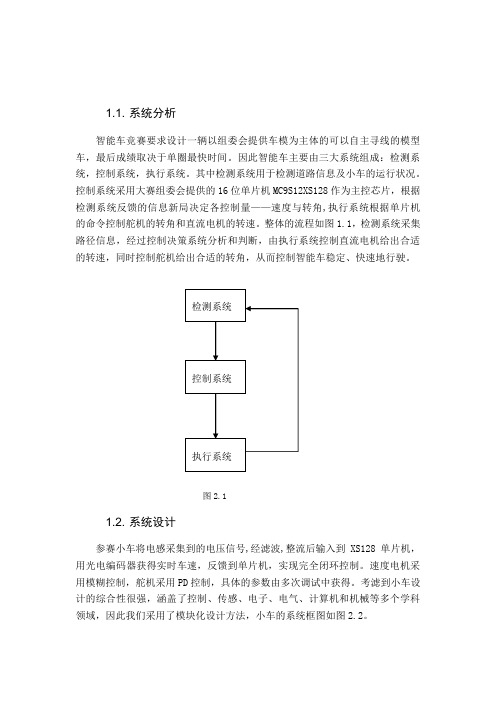
1.1. 系统分析智能车竞赛要求设计一辆以组委会提供车模为主体的可以自主寻线的模型车,最后成绩取决于单圈最快时间。
因此智能车主要由三大系统组成:检测系统,控制系统,执行系统。
其中检测系统用于检测道路信息及小车的运行状况。
控制系统采用大赛组委会提供的16位单片机MC9S12XS128作为主控芯片,根据检测系统反馈的信息新局决定各控制量——速度与转角,执行系统根据单片机的命令控制舵机的转角和直流电机的转速。
整体的流程如图1.1,检测系统采集路径信息,经过控制决策系统分析和判断,由执行系统控制直流电机给出合适的转速,同时控制舵机给出合适的转角,从而控制智能车稳定、快速地行驶。
图2.11.2. 系统设计参赛小车将电感采集到的电压信号,经滤波,整流后输入到XS128单片机,用光电编码器获得实时车速,反馈到单片机,实现完全闭环控制。
速度电机采用模糊控制,舵机采用PD控制,具体的参数由多次调试中获得。
考滤到小车设计的综合性很强,涵盖了控制、传感、电子、电气、计算机和机械等多个学科领域,因此我们采用了模块化设计方法,小车的系统框图如图2.2。
第五届全国大学生智能汽车竞赛技术报告图2.21.3. 整车外观图2.31.4. 赛车的基本参数智能车竞赛所使用的车模是东莞市博思公司生产的G768型车模,由大赛组委会统一提供,是一款带有摩擦式差速器后轮驱动的电动模型车。
车模外观如图3.1。
车模基本参数如表3.1。
图3.1表3.1车模基本参数1.5. 赛车前轮定位参数的选定第五届全国大学生智能汽车竞赛技术报告现代汽车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间须形成一定的相对安装位置,叫车轮定位,其主要的参数有:主销后倾、主销内倾、车轮外倾和前束。
模型车的前轮定位参数都允许作适当调整,故此我们将自身专业课所学的理论知识与实际调车中的赛车状况相结合,最终得出赛车匹配后的前轮参数[6]。
(完整word版)飞思卡尔智能车技术报告
集成化的设计思路的好处是原件密度高,系统可以小型化一体化,通过综合考虑各方面因素,在确定了系统最终硬件方案不做大的更改的情况下,在确保了系统可靠性的前提下,最终选择了一体化,集成化的硬件设计思路。使车体硬件电路布局紧凑,稳定可靠。
3、大前瞻,高分辨率方案。
在光电传感器的安装不影响赛车行驶的前提下,尽可能的提高传感器前瞻,更大的前瞻,能为赛车提供更多的信息,更能让赛车提前作出决策。
3.5.2主销内倾角
主销内倾角是指主销在汽车的横向平面内向倾斜一个角度,即主销轴线与地面垂直线在汽车横向断面内的夹角。主销内倾角也有使车轮自动回正的作用。通常汽车主销内倾角不大于80。
2.5.3前轮外倾角
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角称为“前轮外倾角”。轮胎呈现“八”字形张开时称为“负外倾”,而呈现“V”字形张开时称为“正外倾”。一般前轮外倾角为10左右。
4.5速度检测模块
为了使车在跑的过程中能快速加速,及时减速除了要有好的算法来控制,还依赖于速度闭环返回的速度脉冲值的可靠度和精确度,因此为了提高检测精度,最后选用了精度较高的光电编码器,光电编码器使用5V-24V电源,输出12.5%-85%VCC的方波信号。
9.2存在的不足
9.3可改进的方法
第十章参考文献
第一章引言
1.1方案介绍
系统硬件设计可以说是整个智能车设计的基础和重中之重。正确的硬件设计方向与思路,是系统稳定可靠的基础,功能强大的硬件系统,更为软件系统的发挥提供了强大的平台。、
1、整车低重心设计。
通过以往几届比赛的经验我们看到,往往重心低,体积小巧,布局紧凑的赛车更能取得好的成绩。、于是,我们通过合理布局电路板和各种传感器,尽可能地降低整车重心。在不影响传感器前瞻,或者不过度牺牲传感器性能的情况下,尽量降低光电传感器的高度,以提高赛车的侧翻极限。
飞思卡尔智能车设计方案PPT课件
二值化处理
第8页/共12页
图像去噪
第9页/共12页
算法流程PID控制算法 Nhomakorabeau(k
)
Kp
e(k
)
T Ti
j
k 0
e(
j)
Td T
[e(k
)
e(k
1)]
第10页/共12页
位置型算法流程图
第11页/共12页
感谢您的观看!
第12页/共12页
起点
第1页/共12页
规则要点:
• 1.循黑线(我们是沿着黑线行走) • 2.竞速 • 3.跑道有小s、大s、十字交叉(今年多了虚线) • 4.组别:电磁组、光电组、摄像头组
第2页/共12页
摄像头注意的地方:
• 摄像头选择——ccd、cmos、其他 • 感光灵敏度 • 动态性能 • 图像效果(视角\分辨率\帧频)) • 供电(12V、5V)
第3页/共12页
硬件部分
总体布局
电源分配
第4页/共12页
电机驱动部分
H桥
集成IC: L298、33886、其他
第5页/共12页
电机驱动模块设计
•1.响应灵敏度(速度才是最重要的) •2.制动效果 •3.PCB线宽(电机启动电流很大)
第6页/共12页
黑线提取算法的基本思想:
a)直接利用原始图像逐行扫描,根据设定的阈值提取黑白跳变点; b) 黑线宽度有一个范围,在确定的黑线宽度范围内提取有效黑块,这样可 以滤除不在宽度范围内的黑点干扰; c) 利用黑线的连续性,根据上一行黑线中心的位置来确定本行求出的黑线 中心是否有效; d) 图像是远处小近处大,所以黑线宽度范围和前后行黑线中心的位置差别 都要动态调整; e) 求黑线中心时,因为近处的黑线稳定,远处黑线不稳定,所以采用由近 及远的办法; f) 图像数据量大,全部扫描一遍会浪费很多时间,利用前面已经求出的黑 线中心位置判断出黑线的趋势,从而推断出下一行的黑线大概位置,确 定出扫描范围,避免整行逐点扫描,节约时间; g) 提取出整场所有有效行的黑线中心后,根据预先设定好的权重计算出黑 线中心的加权平均,作为本场的黑线中心。
学做智能车挑战飞思卡尔之智能车制作PPT文档共65页
11、战争满足了,或曾经满足过人的 好斗的 本能, 但它同 时还满 足了人 对掠夺 ,破坏 以及残 酷的纪 律和专 制力的 欲望。 ——查·埃利奥 特 12、不应把纪律仅仅看成教育的手段 。纪律 是教育 过程的 结果, 首先是 学生集 体表现 在一切 生活领 域—— 生产、 日常生 (名 言网)
13、遵守纪律的风气的培养,只有领 导者本 身在这 方面以 身作则 才能收 到成效 。—— 马卡连 柯 14、劳动者的组织性、纪律性、坚毅 精神以 及同全 世界劳 动者的 团结一 致,是 取得最 后胜利 的保证 。—— 列宁 摘自名言网
15、机会是不守纪律的。——雨果
31、只有永远躺在泥坑里的人,才不会再掉进坑里。——黑格尔 32、希望的灯一旦熄灭,生活刹那间变成了一片黑暗。——普列姆昌德 33、希望是人生的乳母。——科策布 34、形成天才的决定因素应该是勤奋。——郭沫若 35、学到很多东西的诀窍,就是一下子不要学很多。——洛克