基于嵌入式STM32的飞思卡尔智能车设计
基于STM32智能小车避障系统的设计
基于STM32智能小车避障系统的设计一、本文概述随着科技的进步和智能化的发展,智能小车作为一种集成了机械、电子、计算机等多学科知识的移动机器人,逐渐进入人们的日常生活。
智能小车的应用场景广泛,包括智能家居、自动导航、工业巡检等。
然而,智能小车在复杂多变的环境中自主导航时,如何有效地避开障碍物成为了一个关键问题。
因此,本文旨在设计一种基于STM32微控制器的智能小车避障系统,以提高小车的自主导航能力和安全性。
本文将首先介绍智能小车避障系统的研究背景和意义,阐述避障系统在智能小车中的重要作用。
接着,将详细分析现有的避障技术及其优缺点,为后续的系统设计提供理论基础。
在此基础上,本文将提出一种基于STM32微控制器的避障系统设计方案,包括硬件设计和软件设计两部分。
硬件设计将介绍小车的硬件组成、传感器选择及电路连接等;软件设计则重点阐述避障算法的实现和程序编写。
通过本文的研究,期望能够设计出一套高效、稳定的智能小车避障系统,提高小车的自主导航能力和避障性能,为智能小车在实际应用中的推广提供有力支持。
本文的研究成果也可为相关领域的研究人员提供有价值的参考和借鉴。
二、系统总体设计基于STM32的智能小车避障系统设计的总体目标是构建一个能够自主导航、实时感知环境并有效避障的智能小车。
系统主要由STM32微控制器、超声波距离传感器、电机驱动模块、电源管理模块、无线通信模块以及相应的控制算法构成。
系统的硬件设计以STM32微控制器为核心,通过其强大的处理能力和丰富的外设接口实现对超声波距离传感器的数据采集、电机驱动模块的控制以及无线通信模块的数据传输。
超声波距离传感器用于实时测量小车与前方障碍物的距离,为避障决策提供数据支持。
电机驱动模块则负责根据控制算法的输出控制小车的运动状态,包括前进、后退、左转、右转等。
系统的软件设计主要包括控制算法的设计和编程实现。
控制算法的核心是避障策略,根据超声波距离传感器测得的距离数据,通过算法计算得出小车的运动方向和速度,从而实现避障功能。
基于STM32的智能小车设计与实现开题报告

基于STM32的智能小车设计与实现开题报告开题报告题目名称基于STM32的智能小车设计与实现题目来源题目类型导师姓名学生姓名班级学号专业1. 选题的背景和意义:随着工业一体话进程的不断加深,人们对智能领域的研究也越来越深入。
智能车在现实生活、生产中的应用十分广泛,它是集环境感知、规划决策、自动行驶等功能于一体的综合系统,是典型的高新技术综合体。
目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已经成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
2. 简述选题在该领域的国内外研究现状:智能小车发展很快,从智能玩具到其它各行业都有实质成果。
其基本可实现循迹、避障、检测贴片寻光入库、避崖等基本功能,这几届的电子设计大赛智能小车又在向声控系统发展。
比较出名的飞思卡尔智能小车更是走在前列。
我此次的设计主要实现循迹避障这两个功能。
智能小车主要运用领域包括军事侦察与环境检测、探测危险与排除险情、安全检测受损评估、智能家居。
目前各国都非常重视智能小车的研究,美国开始组织实施智能车辆先导( intelligent vehicle ini2tiative, IV I) 计划, 欧洲提出公路安全行动计划( roadsafety action p rogram,RSAP) ,日本提出超级智能车辆系统。
我国科技部则于2002年正式启动了“十五”科技攻关计划重大项目,智能交通系统关键技术开发和示范工程,其中一个重要的内容就是进行车辆安全和辅助驾驶的研究。
预计在2020年之前进入智能交通发展的成熟期,人、车、路之间可以形成稳定、和谐的智能型整体。
3. 本课题研究的主要内容:本课题主要开发一个能自动将球类拾起并清除出场外的智能小车,设计主要以简易智能机器人为开发平台,选择STM32单片机为控制平台,通过相关的机械结构设计,编写程序对智能小车进行控制,实现清球功能。
飞思卡尔智能车原理
飞思卡尔智能车原理飞思卡尔智能车是一种基于嵌入式系统和人工智能技术的智能交通工具。
它通过搭载各种传感器、控制器和算法,在无人驾驶、自动泊车等场景下发挥重要作用。
本文将介绍飞思卡尔智能车的原理,并分析其在实际应用中的优势和挑战。
一、飞思卡尔智能车的硬件组成飞思卡尔智能车的硬件组成主要包括以下几个方面:1. 主控单元:主控单元是飞思卡尔智能车的核心组件,通常采用高性能的嵌入式处理器。
它负责接收来自各种传感器的信息,并根据预设的算法进行数据处理和决策。
2. 传感器:飞思卡尔智能车搭载多种传感器,如摄像头、激光雷达、超声波传感器等。
这些传感器可以实时感知周围环境的信息,包括道路状况、障碍物位置等,为智能车提供必要的数据支持。
3. 电机与驱动系统:飞思卡尔智能车搭载电机和对应的驱动系统,用于控制车辆的行驶和转向。
这些系统通常采用先进的电子控制技术,能够实现精确的转向和速度控制。
4. 通信模块:飞思卡尔智能车通过通信模块与其他车辆、交通基础设施等进行信息交互。
这种通信方式可以实现车辆之间的协同工作,提高交通系统的整体效率。
二、飞思卡尔智能车的工作原理飞思卡尔智能车的工作原理可以归结为以下几个关键步骤:1. 环境感知:飞思卡尔智能车通过搭载的传感器对周围环境进行感知。
摄像头可以捕捉到道路状况、交通标志和其他车辆的信息;激光雷达可以检测到障碍物的位置和距离;超声波传感器可以测量车辆与前方障碍物的距离等。
通过这些传感器获取到的数据,智能车可以对周围环境做出准确判断。
2. 数据处理与决策:主控单元接收传感器传来的数据,并根据预设的算法进行数据处理和决策。
它会将传感器的信息与事先建立的模型进行比对,进而判断车辆应该采取何种动作,如加速、刹车、转向等。
3. 控制指令生成:基于数据处理与决策的结果,主控单元生成相应的控制指令,通过驱动系统控制车辆的行驶和转向。
这些控制指令可以通过电机和驱动系统精确地控制车辆的运动。
4. 数据通信与协同:飞思卡尔智能车通过通信模块与其他车辆以及交通基础设施进行信息交互。
基于stm32的智能小车设计毕业设计论文

海南大学毕业论文(设计)题目:基于stm32的智能小车设计学号:姓名:年级:2011级学院:应用科技学院学部:工学部专业:电子科学与技术指导教师:完成日期:2014 年12 月 1 日摘要本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。
此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。
本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。
小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。
在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制AbstractThis experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process. The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance. This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering, tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function. When the car is moving, obstacle avoidance program prior to tracking, using ultrasonic ranging and obstacle avoidance obstacle avoidance circuit, we use steering gear under ultrasonic module to control the emission direction of ultrasonic, infrared detection circuit is used to implement the car tracking function. On the basis of the hardware design is proposed for motor control function, simple intelligent car tracking and obstacle avoidance function of software design, and in the STM32 integrated development environment under the Keil. Write the corresponding control program, and use McUisp program download software.Keywords:STM32;Infrared detection;Ultrasonic obstacle avoidance;PWM;Motor control目录1.绪论.......................................................... - 4 - 1.1研究概况.................................................. - 4 -1.2研究思路.................................................. - 4 -2.软硬件设计.................................................... - 5 - 2.1中央处理模块.............................................. - 5 -2.1.1 stm32f103内部结构 .................................... - 6 -2.1.2 stm32最小系统电路设计 ................................ - 7 -2.1.3 stm32软件设计的基本思路 .............................. - 9 -2.1.4 stm32中断介绍 ........................................ - 9 -2.1.5 stm32定时/计数器介绍 ................................ - 11 -2.1.6 主程序设计流程图..................................... - 12 - 2.2 电机驱动模块............................................. - 12 -2.2.1 驱动模块结构及其原理................................. - 13 -2.2.2 驱动模块电路设计..................................... - 13 -2.2.3驱动软件程序设计 ..................................... - 14 - 2.3 避障模块设计............................................. - 18 -2.3.1 避障模块器件结构及其原理............................. - 19 -2.3.2 HC-SR04模块硬件电路设计 ............................. - 21 -2.3.3 HC-SR04模块程序设计 ................................. - 21 - 2.4循迹模块设计............................................. - 28 -2.4.1 循迹模块结构及其原理................................. - 28 -2.4.2 循迹模块电路设计..................................... - 30 -2.4.3 红外循迹模块程序设计................................. - 30 -3.软件调试..................................................... - 33 - 3.1 程序仿真................................................ - 33 -3.2 程序下载................................................. - 34 -4.系统测试..................................................... - 35 -5.总结......................................................... - 37 - 致谢........................................................... - 39 - 参考文献....................................................... - 40 - 附录........................................................... - 41 -1.绪论智能小车通过各种感应器获得外部环境信息和内部运动状态,实现在复杂环境背景下的自主运动,从而完成具有特定功能的机器人系统。
基于STM32的智能小车控制系统设计
www�ele169�com | 21电子电路设计与方案0 引言移动机器人已经渗透到工业生产、物流、搬运、医疗等社会的每个方面[1]。
智能小车作为一种轮式机器人也得到了广泛的应用研究[2]。
控制系统是智能小车的关键构成部分,能够在较为复杂的环境中,将小车按照预定的轨迹运行,或者运行到预先设定的位置,实现小车精确的速度与位置的控制,对智能小车系统起着至关重要的作用[3]。
因此,本文以四轮轮式结构智能小车为研究对象,采用STM32系列单片机作为控制核心,结合CAN 总线通信接口,设计一种基于STM32的智能小车控制系统,该系统功能强大且扩展性好,具有一定的实用价值。
1 系统介绍智能小车的控制系统是整个智能小车设计过程中最为重要的一环。
智能小车是在它的统一协调控制下完成行走、避障、自主循迹等任务,它的好坏直接关系着智能小车的性能好坏,控制系统的设计方法也决定着智能小车的功能特点。
图1 控制系统结构框图通常,智能小车应具备自主定位、障碍物实时检测、自动避障、速度检测以及无线通信等功能。
根据上述功能的要求,本文所设计的控制系统的硬件模块主要包括:主控模块、障碍物检测模块、速度检测模块、无线通信模块、电源模块以及电机驱动模块等部分。
控制系统的结构如图1所示。
为了方便后续的功能的扩展,在实际设计过程中,各模块的软硬件设计均采用相对独立的模块化设计方法。
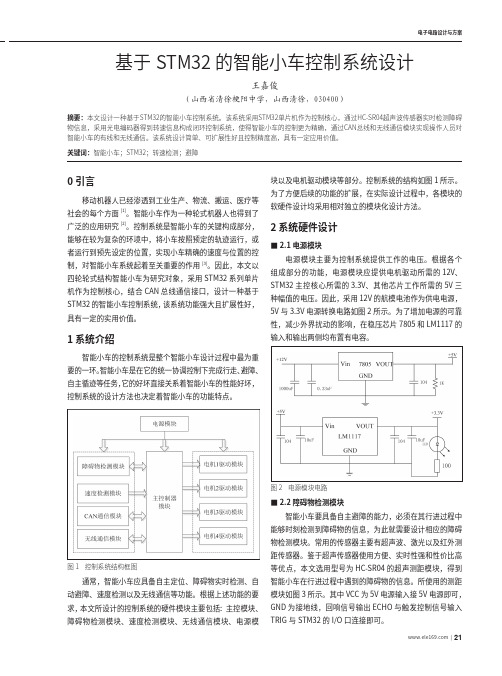
2 系统硬件设计■2.1 电源模块电源模块主要为控制系统提供工作的电压。
根据各个组成部分的功能,电源模块应提供电机驱动所需的12V、STM32主控核心所需的3.3V、其他芯片工作所需的5V 三种幅值的电压。
因此,采用12V 的航模电池作为供电电源,5V 与3.3V 电源转换电路如图2所示。
为了增加电源的可靠性,减少外界扰动的影响,在稳压芯片7805和LM1117的输入和输出两侧均布置有电容。
图2 电源模块电路■2.2 障碍物检测模块智能小车要具备自主避障的能力,必须在其行进过程中能够时刻检测到障碍物的信息,为此就需要设计相应的障碍物检测模块。
“飞思卡尔”智能汽车系统设计
作为最为普遍的交通工具之一 , 汽车与人们的生活息息相关。 一旦智能汽 车得到普及势必会走向量产化, 而在智能汽车普及之前应该制定出相关的设计 标准作为智能汽车的标杆。 智能汽车系统所包含的内容甚多, 如信息控制、 系统 结构、 数据采集、 系统数据库等方面都属于智能汽车系统所涵盖的范畴, 如果没 有统一的标尺, 则会让各个模块之间出现很大的差异化, 这样就会带来一系列 的问 题, 同时也会让智能汽车的构建变得繁琐、 复杂。 通过制定出 统一的标准 , 让系统兼容性得以保证的同时让整个智能汽车系统设计更加规范, 从而带动智 能汽车产业的发展[ 1 】 。
1 . 2 控制模 块
控制系统是智能汽车系统重要的组成部分 , 是实现人机交互的关键。 从当 前的汽车控制来看还是不能离开人工操作 , 只有在驾驶员存在的情况下才能保 证汽车的正常工作。 在驾驶的过程中, 如果时间较长则会给驾驶员带来极大的 疲劳感, 这样就 间接带来了交通事故隐患。 而在智能化汽车将能够摆脱人工操
科 学论 坛
l 蕾
C h i n a s c i e n c e a n d T e c h n o ] o g y R e v i e w
“ 飞 思卡 尔 ” 智能 汽 车 系统 设 计
王贯 安
( 中南大学 湖南 长沙 4 1 0 0 1 2 )
[ 摘 要] 随着 科 技的进 步 , 汽 车产 业也 发生 了翻天 覆地 的变 化 。 在计 算机 技术 、 网络技术 、 电子 技术等 高端 技术 的推动 下 , 智 能汽车 得到 了实 现 , 相信 随着 时 间的推移 。 智能汽车也将有着更加广阔的发展空间。 要让汽车实现智能化, 智能系统设计是十分重要的一个环节。 本文对智能汽车系统进行了综合性的阐述 , 并以 “ 飞思卡尔智” 能汽车比赛对智能汽车系统设计进行了探讨。 [ 关键 词] 飞思 卡 尔 智 能 汽车 系统 设计 中图分类号 : D4 1 2 . 3 文献标识码 : A 文章编号 : 1 0 0 9 - 9 1 4 X ( 2 0 1 4 ) 0 1 —0 2 2 4 一 O 1
基于飞思卡尔单片机的智能车设计
中文题目:基于飞思卡尔单片机的智能车设计外文题目:FREESCALE MCU-BASED DESIGN OF INTELLIGENT VEHICLE毕业设计(论文)共71页(其中:外文文献及译文5页)图纸共1 张完成日期2013年6月答辩日期2013年6月摘要本设计主要讨论了基于Freescale公司的MC9S12XS128芯片制作的自主巡线智能车的设计方案和原理。
本文将从机械结构设计,硬件电路设计和软件算法设计等几个方面全面介绍智能车的制作及调试过程。
根据第八届“飞思卡尔”杯全国大学生智能汽车竞赛的技术要求,赛车以检测通以20KHZ、100mA的导线的电磁场为基础,通过单片机采集到的磁感应电压信号,实现对赛车的转向控制,进而识别赛道达到路径寻迹的目的。
本设计针对控制要求对智能车模型的机械结构进行设计和调整,同时对智能车运行中产生侧滑的原因进行分析,并对智能车的质量和重心位置进行优化调整。
在硬件方面,系统由控制核心(MCU)模块、电源管理模块、路径识别模块、电机驱动模块、舵机控制模块、速度检测模块以及LCD显示模块等组成。
在软件方面,主要编写了主程序、转速检测程序、电机和舵机驱动程序等相关程序。
本设计在原有智能车系统的基础上,对硬件电路进行了改进,提高了路径检测的前瞻性与抗干扰性。
结果表明,智能车在速度、稳定性和可靠性上都达到良好的状态。
关键词:智能车控制;电磁传感器;路径识别;软件设计AbstractThis design focuses MC9S12XS128 based on Freescale's chip production line inspection autonomous intelligent vehicle design and principles. This article from the mechanical design, hardware design and software algorithm design and other aspects of comprehensive introduction smart car production and debugging process.According to the eighth "Freescale" Cup National Undergraduate Smart Car Competition technical requirements, in order to detect the car pass by 20KHZ, 100mA wire EMF-based microcontroller collected through magnetic induction voltage signal, steering control of the car, thus identify the track reaches the path tracing purposes. The design requirements for the control of the smart car model design and the mechanical structure adjustment, while the smart car running analyze the causes of skidding, and the quality and smart car adjustments to optimize the center of gravity position. In terms of hardware, the system controlled by the core (MCU) modules, power management module, the path identification module, the motor drive module, servo control module, the speed detection module and LCD display modules and other components. On the software side, the main compiled main program, speed detection procedures, motors and servo drivers and other related procedures.The design of the original smart car system, based on the hardware circuit has been improved to improve the prospective path detection and interference. The results show that the smart car in terms of speed, stability and reliability have reached a good state.Key words: Intelligent car control; The electromagnetic sensor; Software Design; Path recognition目录0前言.......................................... 错误!未定义书签。
(毕业设计)飞思卡尔智能车及机器视觉

图像处理在智能车路径识别中的应用摘要机器视觉技术在智能车中得到了广泛的应用,这项技术在智能车的路径识别、障碍物判断中起着重要作用。
基于此,依据飞思卡尔小车的硬件架构,研究机器视觉技术应用于飞思卡尔小车。
飞思卡尔智能车处理器采用了MC9S12XS128芯片,路况采集使用的是数字摄像头OV7620。
由于飞思卡尔智能车是是一款竞速小车,因此图像采集和处理要协调准确性和快速性,需要找到其中的最优控制。
因此本设计主要需要完成的任务是:怎样用摄像头准确的采集每一场的图像,然后怎样进行二值化处理;以及怎样对图像进行去噪处理;最后也就是本设计的难点也是设计的核心,怎样对小车的轨迹进行补线。
本设计的先进性,在众多的图像处理技术中找到了适合飞思卡尔智能车的图像处理方法。
充分发挥了摄像头的有点。
经过小车的实际测试以及相关的MATLAB 仿真,最终相关设计内容都基本满足要求。
小车的稳定性和快速性得到显著提高。
关键词:OV7620,视频采集,图像处理,二值化The Application of Image Processing in the Recognition ofIntelligent Vehicle PathABSTRACTCamera Machine vision technology in the smart car in a wide range of applications, the technology identified in the path of the smart car, and plays an important role in the obstacles to judge. Based on this, based on the architecture of the Freescale car, machine vision technology used in the Freescale car. Freescale smart car the processor MC9S12XS128 chip traffic collected using a digital camera OV7620. Freescale's Smart car is a racing car, so the image acquisition and processing to coordinate the accuracy and fast, you need to find the optimal control. This design need to complete the task: how to use the camera to accurately capture every image, and then how to binarization processing; and how to image denoising; last is the difficulty of this design is the design of the core, how to fill line on the trajectory of the car.The advanced nature of the design found in many image processing techniques of image processing methods for Freescale Smart Car. Give full play to the camera a bit. The actual testing of the car and MATLAB simulation, the final design content can basically meet the requirements. The car's stability and fast to get improved significantly.KEY WORDS: OV7620,Video Capture,Picture Processing,Binarization目录前言 (1)第1章飞思卡尔赛车及机器视觉的概述 (2)1.1 智能车的研究背景 (2)1.1.1 智能车的发展历史 (2)1.1.2 应用前景 (2)1.2 智能车设计要求介绍 (3)1.3 机器视觉介绍 (4)1.4 小结 (4)第2章主要思路及技术方案概要 (5)2.1 总体设计主要方法步骤 (5)2.2 摄像头的对比与选择 (5)2.2.1 摄像头的选取 (5)2.2.2 模拟摄像头 (6)2.2.3 数字摄像头 (6)2.2.4 摄像头的选定 (7)2.3 二值化方案的选取 (7)2.3.1 双峰值法 (7)2.3.2 迭代法 (8)2.3.3 大津法 (8)2.3.4 灰度拉伸-一种改进的大津法 (9)2.3.5 二值化方案的最终选定 (9)2.4对图像进行去噪 (9)2.4.1 传统的去噪法 (9)2.4.2 小波去噪 (11)2.4.3 去噪方法的最终确定 (13)2.5小结 (13)第3章硬件设计 (14)3.1 硬件总体方案设计 (14)3.2 核心控制板 (15)3.3 摄像头的安装 (15)3.4 小结 (16)第4章软件设计 (17)4.1 系统软件总体设计方案 (17)4.2 图像二值化软件设计 (17)4.3 去噪设计 (19)4.3.1 实验信号的产生 (19)4.3.2各参数下去噪效果对比 (20)4.4 二值化后补线 (24)4.5 小结 (32)第5 章结果分析 (33)5.1 采集到的灰度值去噪前的MATLAB仿真 (33)5.1.1 去噪前MATLAB函数和仿真结果 (33)5.1.2 去噪后MATLAB仿真结果 (34)5.2 边界扣取 (35)5.2.1 边界扣取函数 (35)5.2.2 边界扣取仿真结果 (36)5.3 补线后效果 (37)5.4 小结 (38)结论 (39)谢辞 (40)参考文献 (41)附录 (42)外文资料翻译 (45)前言机器视觉技术近几十年来已经得到广泛的应用,并且已经取得了巨大的成功,大大改善了人们的日常生活。
《2024年基于STM32智能小车的设计与实现》范文

《基于STM32智能小车的设计与实现》篇一一、引言随着科技的不断进步,智能小车作为一种集成了计算机、传感器和执行器等技术的产品,已经在各个领域得到了广泛的应用。
本文旨在设计并实现一款基于STM32微控制器的智能小车,通过对小车的硬件设计和软件编程进行详细的阐述,以期为相关领域的科研和实践提供一定的参考。
二、硬件设计1. 微控制器选择本设计选用STM32F4系列微控制器,该系列具有高性能、低功耗等特点,能够满足智能小车在复杂环境下的实时控制需求。
2. 传感器模块传感器模块包括红外避障传感器、超声波测距传感器、光电编码器等。
这些传感器能够实时获取小车的环境信息,为小车的智能控制提供数据支持。
3. 电机驱动模块电机驱动模块采用H桥电路,通过PWM信号控制电机的转速和方向。
同时,为了保护电机和电路,还设置了过流、过压等保护措施。
4. 电源模块电源模块采用锂电池供电,通过DC-DC转换器为小车各部分提供稳定的电源。
同时,为了方便充电,还设置了USB接口。
三、软件实现1. 开发环境搭建本设计采用Keil uVision5作为开发环境,通过JTAG或SWD 接口进行程序的烧录和调试。
2. 程序设计程序设计包括主程序、传感器数据处理程序、电机控制程序等。
主程序负责协调各部分的工作,传感器数据处理程序负责获取并处理传感器的数据,电机控制程序则根据数据处理结果控制电机的转速和方向。
3. 算法实现本设计采用PID算法进行电机控制,通过调整PID参数,使小车在各种环境下的运动更加稳定。
此外,还实现了路径规划算法和避障算法,使小车能够根据环境信息自主规划路径和避障。
四、系统测试与实现效果1. 系统测试在完成硬件设计和软件编程后,对智能小车进行了系统测试。
测试内容包括小车的运动性能、传感器数据的准确性、电机控制的稳定性等。
测试结果表明,本设计的智能小车具有良好的性能和稳定性。
2. 实现效果在实际应用中,本设计的智能小车能够根据环境信息自主规划路径、避障和执行其他任务。
基于STM32的智能小车设计

基于STM32的智能小车设计智能小车是一种基于嵌入式系统的移动机器人,结合了传感器、控制器和执行器,能够自主进行感知、决策和行动。
本文将基于STM32单片机来设计一个智能小车。
首先,我们需要选择合适的STM32单片机。
STM32系列单片机具有低功耗、高性能和丰富的外设资源等特点,非常适合用于智能小车设计。
根据需求,我们可以选择不同型号的STM32单片机,如STM32F103系列。
接下来,我们需要确定智能小车的功能需求和硬件设计方案。
一般来说,智能小车需要进行感知、决策和控制等任务。
感知任务包括使用传感器获取环境信息,如红外传感器、超声波传感器和摄像头等。
决策任务通过分析感知信息来做出智能决策,如避障、跟随线路等。
控制任务包括通过执行器进行动作控制,如电机驱动、舵机控制等。
基于STM32的智能小车设计需要进行硬件连接和软件开发。
在硬件连接方面,我们需要将传感器和执行器与STM32单片机相连接,通过GPIO 口、定时器和中断等机制进行数据的输入和输出。
在软件开发方面,我们需要使用C语言编写嵌入式程序,通过编写驱动程序和算法实现智能小车的各项功能。
对于传感器的使用,我们可以使用红外传感器来进行避障,超声波传感器来进行距离测量,摄像头来进行图像处理等。
对于执行器的控制,我们可以使用直流电机来驱动轮子,舵机来控制方向等。
同时,我们还可以添加WiFi或蓝牙模块,与智能手机或电脑进行通信,实现远程控制或数据传输等功能。
在软件开发方面,我们需要编写驱动程序来控制传感器和执行器的工作,并利用定时器、中断和PWM等功能实现精确的控制。
同时,我们还需要编写算法来处理传感器数据,进行决策和控制。
例如,基于红外传感器的避障算法可以通过检测障碍物的距离和方向来进行避障决策,基于摄像头的图像处理算法可以识别线路并进行跟随等。
为了方便开发和调试,我们可以使用开发板或者自制底板来进行硬件连接。
开发板可以帮助我们快速搭建硬件环境,并提供丰富的软件开发工具和示例代码。
基于STM32智能小车的设计与实现

基于STM32智能小车的设计与实现基于STM32智能小车的设计与实现近年来,随着人工智能和物联网技术的迅猛发展,智能小车成为了人们关注的焦点。
本文将介绍一款基于STM32芯片的智能小车的设计与实现。
首先,让我们来了解一下STM32芯片。
STM32是意法半导体公司推出的一款微控制器,具有低功耗、高性能、高可靠性的特点。
它内置了丰富的外设,包括多个串口、定时器、ADC和CAN等。
因此,我们选择STM32作为智能小车的主控芯片。
智能小车的设计主要包括硬件设计和软件设计两个方面。
在硬件设计方面,我们需要选用合适的电机、轮子、传感器等组件。
电机作为小车的动力驱动器,我们选择了直流电机来驱动轮子的转动。
传感器则用于获取环境信息,以便智能小车能够做出相应的行动。
在本设计中,我们使用了红外避障传感器、超声波测距传感器和巡线传感器。
接下来,我们进行电路的设计。
主控板上集成了STM32芯片、电机驱动芯片、传感器接口电路等。
我们将这些电路连接在一起,并通过适当的连接线与电机、传感器等组件相连。
通过这样的设计,我们可以实现智能小车的各项功能。
在软件设计方面,我们使用Keil C编译器进行开发。
首先,我们需要对STM32芯片进行初始化,包括设置GPIO引脚的输入输出状态、串口通信参数的配置等。
然后,我们通过编写驱动程序来实现对电机的控制。
在驱动程序中,我们可以设置电机的运动方向、速度等参数。
此外,我们还需要编写传感器的数据读取程序。
通过读取传感器的数据,我们可以实时地了解到周围环境的情况。
最后,我们可以根据不同的传感器数据,编写控制算法,使智能小车能够根据环境情况作出合理的决策。
通过以上的设计与实现,我们成功地搭建了一台基于STM32芯片的智能小车。
该小车可以根据传感器获取到的数据,对周围环境做出相应的反应。
比如在检测到障碍物时,小车能够自动避开;在巡线传感器检测到黑线时,小车能够沿着黑线行驶。
这样的智能小车不仅能够增加乐趣,还可以具备实际应用价值。
《2024年基于STM32的智能小车研究》范文

《基于STM32的智能小车研究》篇一一、引言随着科技的进步和人工智能的快速发展,智能小车作为一种集成了传感器、控制算法和执行机构的智能设备,在物流、安防、救援等领域得到了广泛的应用。
STM32系列微控制器以其高性能、低功耗的特点,在智能小车的控制系统中得到了广泛的应用。
本文将基于STM32的智能小车研究进行探讨,分析其设计原理、实现方法和应用前景。
二、STM32微控制器概述STM32系列微控制器是ST公司推出的一款基于ARM Cortex-M内核的微控制器,具有高性能、低功耗、低成本等特点。
其丰富的外设接口和强大的计算能力,使得STM32在智能小车的控制系统中发挥着重要的作用。
STM32通过与各种传感器、执行机构等设备的连接,实现对小车的控制,完成各种复杂的任务。
三、智能小车设计原理智能小车的设计主要包括硬件设计和软件设计两部分。
硬件设计主要包括小车的机械结构、传感器、执行机构等设备的选择和布局。
软件设计则主要包括控制算法的实现、通信协议的制定等。
在硬件设计方面,智能小车通常采用轮式结构,通过电机驱动实现运动。
传感器部分包括速度传感器、距离传感器、方向传感器等,用于获取小车的运动状态和环境信息。
执行机构部分包括电机驱动器、舵机等,用于控制小车的运动方向和速度。
在软件设计方面,STM32通过控制算法实现对小车的控制。
常见的控制算法包括PID控制算法、模糊控制算法等。
此外,为了实现小车的自主导航和避障等功能,还需要制定相应的通信协议,实现小车与上位机或其他设备的通信。
四、实现方法基于STM32的智能小车实现方法主要包括以下几个方面:1. 硬件搭建:根据小车的机械结构和功能需求,选择合适的传感器、执行机构等设备,完成硬件的搭建和布局。
2. 程序设计:编写控制算法和通信协议的程序,实现小车的控制和通信功能。
3. 调试与测试:对小车进行调试和测试,确保其各项功能正常。
4. 优化与改进:根据测试结果和实际需求,对小车的硬件和软件进行优化和改进,提高其性能和稳定性。
《2024年基于STM32智能小车的设计与实现》范文
《基于STM32智能小车的设计与实现》篇一一、引言随着科技的不断发展,智能小车在物流、安防、救援等领域的应用越来越广泛。
本文将详细介绍基于STM32的智能小车的设计与实现过程,包括硬件设计、软件设计、系统调试及性能测试等方面。
二、硬件设计1. 核心控制器本设计采用STM32系列微控制器作为核心控制器,其具有高性能、低功耗等优点,适用于智能小车的控制需求。
2. 电机驱动模块电机驱动模块采用H桥电路,用于控制小车的运动。
本设计采用两个电机驱动模块,分别控制小车的左右轮,实现小车的转向和前进后退功能。
3. 传感器模块传感器模块包括红外传感器、超声波传感器等,用于实现小车的避障和路径识别功能。
其中,红外传感器用于检测前方障碍物,超声波传感器用于测量与障碍物的距离。
4. 电源模块电源模块为小车提供稳定的电源供应。
本设计采用锂电池作为电源,通过DC-DC转换器为各模块提供稳定的电压。
三、软件设计1. 操作系统及开发环境本设计采用嵌入式操作系统,如RT-Thread等,为小车的软件设计提供支持。
开发环境采用Keil uVision等集成开发环境,方便程序的开发和调试。
2. 程序设计程序设计包括主程序、电机控制程序、传感器读取程序等。
主程序负责协调各模块的工作,电机控制程序根据传感器的信息控制电机的运动,实现小车的避障和路径识别功能。
传感器读取程序负责读取红外传感器和超声波传感器的信息,为电机控制程序提供依据。
四、系统调试及性能测试1. 系统调试系统调试包括硬件电路的调试和软件程序的调试。
硬件电路的调试主要检查各模块的连接是否正确,电源供应是否稳定等。
软件程序的调试主要检查程序的逻辑是否正确,各模块之间的协调性是否良好等。
2. 性能测试性能测试包括避障测试、路径识别测试等。
避障测试中,将小车置于不同障碍物环境下,观察其是否能正确避开障碍物。
路径识别测试中,设置不同的路径,观察小车是否能按照设定的路径行驶。
五、结论本文介绍了基于STM32的智能小车的设计与实现过程。
基于STM32的WIFI智能小车

基于STM32的WIFI智能小车1. 本文概述本文主要介绍了基于STM32的WIFI智能小车的设计与实现。
在无线网络蓬勃发展的当下,无线系统已经融入了我们的日常生活,而WiFi技术作为移动终端的主要应用,也逐渐扩展到了家居智能控制系统等领域。
本文通过在STM32单片机上嵌入WIFI模块,实现了智能小车的无线控制功能。
文章对小车的现状进行了介绍,并分析了小车的整体架构设计。
详细阐述了具备WIFI功能的智能小车的硬件和软件的具体设计,包括驱动、显示、检测等常用硬件功能的使用,以及uCGUI多窗口应用程序界面设计实现的WiFi热点访问界面。
通过这些设计,使得小车具备了先进的WIFI控制功能,可以通过手机或电脑进行远程操作,实现了智能避障、报警、实时状态显示等功能,为智能家居等领域的应用提供了新的可能。
2. 32在智能小车中的应用随着物联网和无线通信技术的快速发展,传统的智能小车已经无法满足现代社会的需求。
为了增强小车的智能化和自主性,STM32微控制器被广泛地应用于智能小车的控制系统中。
STM32以其高性能、低功耗和易于编程的特性,在智能小车的设计中发挥了重要作用。
(1)核心控制:STM32作为小车的核心控制器,负责接收来自各种传感器的数据,并根据预设的算法或用户输入的指令来控制小车的行驶方向、速度和轨迹。
它还要处理来自WIFI模块的数据,实现与上位机或云端服务器的通信。
(2)传感器数据处理:智能小车通常会搭载多种传感器,如超声波传感器、红外传感器、摄像头等,用于检测周围环境、障碍物和道路信息。
STM32能够高效地处理这些传感器的数据,提取出有用的信息,并据此做出决策。
(3)WIFI通信:通过内置的WIFI模块,STM32可以实现智能小车与手机、平板或电脑等设备的无线连接。
这使得用户可以通过手机APP或网页来远程控制小车,或者将小车的行驶数据和视频流传输到上位机进行分析和处理。
(4)电源管理:STM32还负责智能小车的电源管理,包括电池的电压监测、充电控制、功耗优化等。
飞思卡尔智能车竞赛设计方案

飞思卡尔智能车竞赛设计方案清晨的阳光透过窗帘,洒在书桌上那厚厚一摞方案草稿上。
我泡了杯咖啡,打开电脑,准备着手写这个“飞思卡尔智能车竞赛设计方案”。
10年的方案写作经验告诉我,这是一个充满挑战的任务,但也是展示自己才华的舞台。
一、项目背景飞思卡尔智能车竞赛是一场针对大学生的科技竞赛,旨在培养创新精神和实践能力。
参赛队伍需要设计一款智能车,通过传感器、控制器、执行器等部件,使车辆在规定的赛道上自主行驶,完成各种任务。
这场比赛既考验技术,也考验团队协作。
二、设计方案1.车辆整体设计车辆整体设计要兼顾美观、实用和稳定性。
外观上,我们采用流线型设计,减少空气阻力;内部结构紧凑,降低重心,提高稳定性。
车辆尺寸符合比赛规定,确保在赛道上行驶自如。
2.传感器配置(1)激光雷达:用于实时获取车辆周围环境信息,绘制三维地图。
(2)摄像头:用于识别赛道标志、障碍物等。
(3)超声波传感器:用于检测前方障碍物距离,避免碰撞。
(4)红外传感器:用于检测赛道边缘,防止车辆出轨。
3.控制器设计(1)路径规划:根据传感器信息,实时规划车辆行驶路径。
(2)速度控制:根据赛道状况,调整车速,确保稳定行驶。
(3)避障策略:当检测到前方有障碍物时,及时调整行驶方向。
4.执行器设计(1)电机驱动:驱动车辆前进、后退、转向。
(2)舵机:用于调整摄像头角度,获取更多赛道信息。
(3)电磁阀:用于控制车辆制动。
三、团队协作一个优秀的团队是项目成功的关键。
我们团队成员各司其职,密切配合:1.项目经理:负责整体进度把控,协调各方资源。
2.硬件工程师:负责车辆整体设计和传感器、执行器选型。
3.软件工程师:负责控制器设计和程序编写。
4.测试工程师:负责车辆调试和性能测试。
四、项目实施1.初期准备:收集比赛相关信息,了解赛道状况,确定设计方案。
2.设计阶段:根据设计方案,绘制图纸,选型采购。
3.制作阶段:组装车辆,调试传感器、控制器和执行器。
4.测试阶段:进行多次试验,优化控制策略,提高车辆性能。
基于STM32智能小车的设计与实现
基于STM32智能小车的设计与实现基于STM32智能小车的设计与实现一、引言近年来,随着科技的不断发展,物联网和人工智能等技术的兴起,智能小车在工业生产、运输、服务和娱乐等领域逐渐得到应用。
基于STM32的智能小车拥有较高的处理性能和稳定性,在智能移动操控、传感器数据处理和智能决策等方面有着广泛的应用场景,具有很高的研究和实践价值。
本文将介绍基于STM32智能小车的设计与实现过程。
二、硬件设计(一)硬件平台选择基于STM32的智能小车主要涉及到底层硬件设计,其中选择合适的硬件平台非常关键。
STM32系列微控制器是由意法半导体(STMicroelectronics)推出的32位ARM Cortex-M内核系列微控制器,具有低功耗、高性能和灵活性等特点,非常适合用于智能小车的设计。
因此,在本系统中选择STM32作为主控芯片。
(二)传感器模块智能小车作为一种能够感知环境并自主决策的机器人装置,需要借助各种传感器来获取环境信息。
本设计中,使用了多种传感器模块,包括:1. 超声波传感器:用于检测障碍物与小车的距离,通过测量超声波的返回时间来计算距离。
2. 红外传感器:用于检测地面上的黑线,根据黑线的位置进行小车的自动导航。
3. 光敏传感器:用于检测光线强度的变化,通过光线信号的反馈来实现小车对环境亮度的感知。
4. 温湿度传感器:用于检测环境的温度和湿度,为小车提供更全面的环境信息。
(三)驱动模块为了实现小车的运动,需要使用各种电机和驱动模块。
本设计中,使用直流电机作为小车的驱动力源,通过H桥驱动模块控制电机的转动方向和速度。
(四)通讯模块为了实现小车与外部设备的数据交互和远程控制,本设计中使用无线通信模块,如蓝牙或Wi-Fi模块,来实现与移动设备或主机的通信功能。
三、软件设计(一)控制算法智能小车的控制算法是实现自主行动和决策的关键。
在本设计中,通过PID(比例-积分-微分)控制算法来进行小车的位置和方向控制,控制小车按照指定路径行驶,并及时校正运动误差。
基于stm32的智能小车课程设计功能模块的划分

基于STM32的智能小车课程设计功能模块的划分随着科技的不断发展,智能小车作为一种智能化的机器人设备,已经在教学实验和科研领域得到了广泛的应用。
基于STM32的智能小车课程设计是一门将理论知识与实践相结合的课程,通过对STM32单片机的功能模块进行划分,学生可以在实际操作中深入了解单片机控制原理和应用。
本文将基于STM32的智能小车课程设计功能模块进行详细的划分,以便于教师和学生更好地理解课程的内容与结构。
一、硬件模块的划分1. 控制模块1.1 STM32单片机1.2 驱动电路1.3 传感器接口2. 传感器模块2.1 光电传感器2.2 红外传感器2.3 超声波传感器3. 执行模块3.1 电机驱动3.2 舵机控制3.3 无线通信二、软件模块的划分1. 系统初始化1.1 端口初始化1.2 定时器设置1.3 中断配置2. 运动控制2.1 速度控制2.2 转向控制2.3 路径规划3. 传感器数据处理3.1 传感器数据采集3.2 数据滤波处理3.3 数据解析与显示4. 无线通信4.1 通信协议4.2 信号传输4.3 数据接收与发送三、课程设计模块的划分1. 实验前准备1.1 实验器材准备1.2 软件环境搭建2. 硬件电路设计2.1 控制模块设计2.2 传感器模块设计2.3 执行模块设计3. 软件程序设计3.1 系统初始化编程3.2 运动控制程序设计3.3 传感器数据处理程序设计3.4 无线通信程序设计4. 系统集成测试4.1 硬件连接测试4.2 软件功能测试4.3 整体性能测试基于STM32的智能小车课程设计功能模块的划分,可以帮助学生系统地学习和掌握单片机控制的原理和方法,培养学生的动手能力和创新意识。
教师可以根据功能模块的划分,有针对性地进行教学安排和指导,提高教学效果和学习效率。
基于STM32的智能小车课程设计功能模块的划分,对于促进学生对单片机控制技术的理解和应用具有重要意义,同时也有利于提高教学质量和学术水平的提升。
基于STM32的课程设计

基于STM32的课程设计简介本文档介绍了基于STM32的课程设计的详细内容。
该课程设计旨在帮助学生通过使用STM32微控制器开发板,实现一个功能完整且具有实际应用价值的项目。
设计目标与背景课程设计的目标是让学生掌握STM32微控制器的基本原理和应用开发技巧。
通过实现一个完整的项目,学生将学会如何使用STM32进行硬件设计、外设驱动、任务调度等方面的开发工作。
设计要求课程设计的具体要求如下:1.使用STM32系列微控制器作为项目的核心控制器。
2.实现一个具有实际应用价值的功能,例如:智能家居、智能车辆、医疗仪器等。
3.项目的硬件设计需要充分利用STM32的各种外设,例如:GPIO、UART、I2C、SPI等接口。
4.项目的软件设计需要包括任务调度、外设驱动、数据通信等。
5.项目需要具有一定的用户交互界面,例如:LCD显示屏、按键等。
设计流程课程设计的整体流程如下:1.确定项目的具体应用领域和功能需求。
2.进行STM32微控制器的硬件设计,包括外设的连接和电源电路的设计。
3.编写STM32微控制器的驱动程序,包括外设驱动和任务调度。
4.设计用户交互界面,选择适当的显示屏和按键。
5.根据项目需求进行软件开发,实现功能算法和数据通信。
6.进行集成调试和性能优化。
7.撰写课程设计报告,总结项目的设计过程和结果。
设计示例以智能家居为例,以下是一个基于STM32的课程设计的具体示例:1.硬件设计阶段:–使用STM32系列微控制器作为核心控制器。
–连接各种外设,例如传感器(温度、湿度、光照等)、执行器(开关、电机等)。
–设计电源电路,包括稳压、过压保护等。
2.软件设计阶段:–编写外设驱动程序,包括传感器的读取和执行器的控制。
–设计任务调度程序,实现各个功能模块的并行运行。
–实现数据通信功能,例如与手机或电脑进行通信。
3.用户交互界面:–使用LCD显示屏显示当前状态和操作结果。
–添加按键,实现用户对系统的操作。
4.软件开发阶段:–实现智能家居的功能算法,例如温度自动调节、定时开关等。
《2024年基于STM32的智能小车研究》范文
《基于STM32的智能小车研究》篇一一、引言随着科技的进步和人工智能的飞速发展,智能小车作为机器人技术的重要应用领域,逐渐成为研究的热点。
STM32系列微控制器以其高性能、低功耗的特点,被广泛应用于智能小车的控制系统设计。
本文旨在探讨基于STM32的智能小车的研究与实现。
二、研究背景STM32系列微控制器作为嵌入式系统的核心部件,拥有强大的计算能力和丰富的接口资源。
智能小车作为一种集成了传感器、控制、通信等技术的移动平台,具有广泛的应用前景。
基于STM32的智能小车研究,旨在通过优化硬件设计和软件算法,提高小车的运动性能、环境感知能力和自主决策能力。
三、系统设计1. 硬件设计基于STM32的智能小车硬件系统主要包括STM32微控制器、电机驱动模块、传感器模块、电源模块等。
其中,STM32微控制器作为核心部件,负责整个系统的控制和协调。
电机驱动模块用于驱动小车的运动,传感器模块包括速度传感器、距离传感器等,用于感知小车的运动状态和环境信息。
电源模块为整个系统提供稳定的电源供应。
2. 软件设计软件设计是智能小车的关键部分,主要包括控制算法、传感器数据处理、通信协议等。
控制算法采用经典的PID控制算法,通过调整控制参数,实现小车的精确运动。
传感器数据处理则是对从传感器获取的数据进行滤波、分析、处理,提取有用的信息。
通信协议则用于实现小车与上位机之间的数据传输和指令交互。
四、关键技术研究1. 运动控制技术运动控制技术是智能小车的核心技术之一,包括路径规划、速度控制、方向控制等。
通过优化PID控制算法,实现小车的精确运动和稳定控制。
同时,采用先进的传感器技术,实现小车的自主导航和避障功能。
2. 传感器技术传感器技术是智能小车环境感知的关键技术,包括距离传感器、速度传感器、方向传感器等。
通过采集环境中的信息,为小车的运动控制和决策提供依据。
同时,采用数据融合技术,提高传感器数据的准确性和可靠性。
五、实验与分析通过搭建实验平台,对基于STM32的智能小车进行实验验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要飞思卡尔智能车大赛是面向全国大学生举办的应用型比赛,旨在培养创新精神、协作精神,提高工程实践能力的科技活动。
大赛主要是要求小车自主循迹并在最短时间内走完整个赛道。
针对小车所安装传感器的不同,大赛分为光电组、电磁组和摄像头组。
本文介绍了本院自动化系第一届大学生智能汽车竟赛的智能车系统。
包括总体方案设计、机械结构设计、硬件电路设计、软件设计以及系统的调试与分析。
机械结构设计部分主要介绍了对车模的改进,以及舵机随动系统的机械结构。
硬件电路设计部分主要介绍了智能车系统的硬件电路设计,包括原理图和PCB设计智能车系统的软、硬件结构及其开发流程。
该智能车车模采用学校统一提供的飞思卡尔车模,系统以STM32F103C8T6作为整个系统信息处理和控制命令的核心,使用激光传感器检测道路信息使小车实现自主循迹的功能关键字:飞思卡尔智能车 STM32F103C8T6 激光传感器第一章概述1.1专业课程设计题目基于嵌入式STM32的飞思卡尔智能车设计1.2专业课程设计的目的与内容1.2.1目的让学生运用所学的计算机、传感器、电子电路、自动控制等知识,在老师的指导下,结合飞思卡尔智能车的设计独立地开展自动化专业的综合设计与实验,锻炼学生对实际问题的分析和解决能力,提高工程意识,为以后的毕业设计和今后从事相关工作打下一定的基础。
1.2.2内容本次智能车大赛分为光电组和创新做,我们选择光电组小车完成循迹功能。
该智能车车模采用学校统一提供的飞思卡尔车模,系统以STM32F103C8T6作为整个系统信息处理和控制命令的核心,我们对系统进行了创造性的优化:其一,硬件上采用激光传感器的方案,软件上采用keil开发环境进行调试、算法、弯道预判。
其二,传感器可以随动跟线,提高了检测范围。
其三,独立设计了控制电路板,充分利用STM32单片机现有模块进行编程,同时拨码开关、状态指示灯等方便了算法调试。
1.3方案的研讨与制定1.3.1传感器选择方案方案一:选用红外管作为赛道信息采集传感器。
由于识别赛道主要是识别黑白两种不同的颜色,而红外对管恰好就能实现区分黑白的功能,当红外光照在白色KT板上时,由于赛道的漫反射作用,使得一部分红外光能反射回来,让接收管接的输出引脚的电压发生变化,通过采集这个电压的变化情况来区分红外光点的位置情况,以达到区分赛道与底板的作用。
红外管的优点在于价格便宜,耐用;缺点却用很多:1、红外光线在自然环境中,无论是室内还是室外均比较常见,就使得其抗干扰能力不强,容易受环境变化的影响。
2、调试不方面,由于红外光是不可见光,调试的时候需要采用比较麻烦的方法来判断光电的位置。
3、由于红外管光线的直线性不好,就使得红外传感器所能准确的判断的最远距离比较小,也就是通常所说的前瞻不够远。
方案二:选用激光作为路径识别传感器。
激光传感器的工作原理和红外传感器的工作原理基本相同,也是利用光线在赛道上发生漫反射后接收反射回来的光线来识别赛道的。
激光传感器用很多优点:1、激光光束的直线性十分好,发射出去的光线发生散射的程度可以忽略;2、经过调制后的激光受环境其他光线干扰的程度也十分低。
3、激光传感器可以让赛车的前瞻达到80CM到100CM左右,为赛车的高速运时所需的准确及时的赛道信息提供了保障。
不过激光也用缺点:容易衰减。
最终选择的方案:激光传感器相对于红外传感器有很明显的优势:1、抗干扰能力强;2、前瞻远;3、调试效果直观。
而在赛车需要的高速的情况下,看得足够远和准确显得尤为重要,在这样的要求下,激光传感器较于红外传感器有十分明显的优势,所以最终我们选择的是拥有绝对优势的激光传感器作为路径识别传感器。
1.3.2传感器安装方式方案一:传感器角度和高度不可变化的固定式。
方案二:传感器可以活动的可动式。
传感器可动式主要是依靠舵机带动而活动,也就是最近这两届比赛中开始出现的“摇头”(又称“摆头”)式。
通过控制相应的舵机达到控制传感器角度的效果,调节传感器的角度可以让传感器发出的光线始终落在赛道上你想要的位置,这样大大地增加了对赛道信息的准确性和及时性,为赛车速度的提升有很大的帮助,在第六届的竞赛中,我们就能体会到摇头光电车的速度较以往的光电车有了很大的提高。
最终确定的方案:经过各方面的考虑,最终选择单摇头作为传感器的固定方式。
安装图如图1-1:图1-1 传感器安装图1.4 项目功能模块化设计(1)MC9S12XS128主控模块:作为整个智能汽车的“大脑”,将采集光电传感器的信号,根据控制算法做出控制决策,驱动直流电机完成对智能汽车的控制。
(2)激光传感器模块:是智能汽车的“眼睛”,可以通过一定的前瞻性,提前感知预测前方的赛道信息,为智能汽车的“大脑”做出决策提供必要的依据和充足的反应时间。
(3)电源模块:为整个系统提供合适而又稳定的电源。
(4)电机驱动模块:驱动直流电机完成智能汽车的加减速控制和转向控制。
(5)舵机控制:一方面,控制传感器检测道路弯道,控制传感器的转向。
另一方面,控制小车的整体的转向。
第二章项目硬件方案2.1 系统方框图图2-1智能车整体框图整个智能车系统包括:激光传感器、舵机转向控制、电机驱动控制、电源供电模块和STM32F103C8T6。
详细如下:(1)激光传感器:该智能车通过激光传感器对道路信息进行采集。
原理:当激光照射到黑线时,黑线将大部分光吸收掉,激光不能反射回来。
当激光照射到白色赛道时,由于漫反射作用接收管能够将激光接收回来。
由此来对道路信息采集与处理。
(2)舵机控制:本车采用摇头舵机和转向舵机相互协调的方式控制车模在不同的弯道给出合适的转角。
摇头舵机作用是追寻赛道,转向舵机根据所采集到的信息给出不同的打角。
(3)电机驱动控制:想要智能车以最快的速度跑完全程则必须对电机有很好的控制策略。
我们的控制策略是:直道时以最快速度行驶,入弯时减速,出弯加速。
这样小车以最快的速度顺利的跑完全程。
(4)电源模块:电源智能车工作的必要前提,它为各个电路模块提供稳定电源,保证各模块正常工作,这也是智能车设计需要考虑的一个很关键的问题。
(5)MC9S12XS128最小系统:这部分是整车的核心。
它主要实现对采集的道路信息进行分析与处理,给舵机和电机不同的占空比来控制小车的转向和加速减速。
2.2 系统器件选型STM32F103C8T6 最小系统电机驱动模块激光传感器 电源模块舵机控制小车的车模、电机、舵机及电池均由学校统一提供,而单片机和传感器则经过讨论,我们选用了STM32F103C8T6和激光传感器。
2.1.1车膜整体结构图 2-2 车模实物图硬件资源:(1)1个HL-380H车模的基本支架;(2)1个RS380高速电机;(3)1个MG995舵机;(4)1个配套电机齿轮;(5)1套螺丝包;(6)轴承若干。
2.2.2 转向舵机的安装2.2.3 车轮及底盘调整表 2-2 2.2.4 RS540电机图2-3 电机实物图2.2.5 电池电源图 2-4电池实物图主要参数:电池厚:15MM 宽:35MM 长:67MM电池重:70G持续放电电流:20C瞬间放电电流:40C放电终止电压:单体208V2.2.6 单片机单片机是系统设计的核心,根据设计要求,本设计采用STM32F103C8T6单片机作为控制器,选择购买单片机最小系统,此系统稳定且非常可靠,所有引脚均引出,能满足设计要求,具体实物如图2-3所示:图2-3 STM32F103C8T6实物图2.2.7 激光传感器针对激光传感器的优点我们选用了12个激光头,对应6个接收管。
实物图如图2-4:图2-4 激光传感器实物图2.3 系统整体原理图2.3.1 整体原理综述整个小车系统由单片机最小系统、电机驱动电路、传感器电路、电源供电电路以及单片机的下载在口构成,总的主控制电路图如下图2-5:图2-5主控制电路图2.3.2 各模块原理综述1.单片机最小系统单片机最小系统的三要素是:电源、晶振、复位电路构成。
如图2-6为单片机最小系统电路图:图2-6 单片机最小系统(1)微控制器,STM32F103C8T6微控制单元作为STM32系列的32位单片机,由标准片上外围设备组成,包括32位中央处理器、64KB的Flash存储器、20KB的RAM、两个12位ADC,三个通用16位定时器加一个PWM定时器,以及标准和先进的通讯接口:上两I2CS和SPI接口,三个串行外设接口,一个USB和CAN,组8通道的输入捕捉或输出捕捉的增强型捕捉定时器、两组8通道10路模数转换器、一组8通道脉宽调制模块、一个字节数据链路控制器、29 路独立的数字I/O接口、20路带中断和唤醒功能的数字I/O接口、1个增强型CAN总线接口,同时,单片机内集成了锁相环电路可使能耗和性能适应具体操作的需要。
(2)电源是系统正常工作的保障,关系着小车是否能正常运行。
比赛使用的是统一提供的7.2V,2000MA NI-CD电池供电。
而单片机和传感器需要的是3.3V和5V电源,舵机需要7.2V电源,因此我们需要稳压芯片降低电压以提供各个模块使用。
我们常用的集成三端稳压芯片有两种:线性稳压芯片和开关型稳压芯片。
线性稳压芯片的特点是反应速度很快、输出纹波小、发热量大、效率低,而开关型稳压型片则功耗小、效率高,单输出纹波大,电路复杂。
经过大量的选型和测试后,我们选择了LM1117和7805。
LM1117为低压差线性调节稳压器件,最大输出电流800MA,经过LM1117稳压后,输出3.3V和5V,对单片机和传感器等供电。
7805为三端稳压器件,经过7805稳压后,输出7.2V,对舵机供电。
2-7图为电源模块基本电路图图2-7电源模块电路图(3)晶振图2-8晶振电路图(4)复位电路图2-7复位电路图2、电机驱动模块本次选用飞思卡公司的MC33886电机驱动集成芯片它是一种常见的集成H 桥式电机驱动芯片,该芯片具有完善的过流、欠压、过温保护等功能具有最大5A的连续工作电流,内部MOSFET导通电阻为120毫欧,使用集成芯片的电路设计简单,可靠性高,由于电机较大,工作电流远不止5A,因此我们采用两片MC3886并联。
电路图如2-8:图2-8电机驱动电路3、激光传感器激光发射管发射出去的激光照射到赛道表面时会产生漫反射,这时由漫反射反射回的光束,经过透镜聚焦后聚集在激光接收传感器上,如图2-9所示:图2-9激光传感器原理图根据本次比赛寻双线的赛道特点,我们在激光头及激光传感器的布局上选用了“一”字形布局,并且采用了摇头的方法,即用舵机来控制其方向。
如图2-10所示:图2-10激光头分布图本文使用了12个激光头,6个激光接收管。
方案中采用74LS138译码器和三极管驱动,实现分时单独点亮激光管,防止相邻激光头之间的干扰。