飞思卡尔智能车机械结构简介 共21页PPT资料
飞思卡尔智能车电机资料上课讲义

3.1.6驱动电机介绍驱动电机采用直流伺服电机,我们在此选用的是RS-380SH型号的伺服电机,这是因为直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。
在很多方面有优越性,具体来说,它具有以下优点:(1)具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。
(2)调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。
(3)具有快速响应能力,可以适应复杂的速度变化。
(4)电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击的影响。
(5)可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时间运行于停转状态,电机长时间停转时,稳定温升不超过允许值时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连续堵转电流。
图3.1为该伺服电机的结构图。
图3.2是此伺服电机的性能曲线。
图3.1 伺服电机的结构图图3.2 伺服电机的性能曲线3.1.7 舵机介绍舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图3.3所示。
图3.4为舵机的控制线。
图3.3 舵机控制要求图3.4 舵机的控制线控制线输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms-2ms之间。
而低电平时间应在5ms到20ms间,并不很严格。
下表3.3表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂的位置的关系:表3.3脉冲宽度与舵机位置表考虑到舵机安装的位置与舵机的响应速度有关,在设计中我把舵机安装在较高的位置,使转向拉杆加长,使得在舵机转动相同的角度时前轮(即方向轮)转动的角度加大,转向灵敏。
《智能车制作 “飞思卡尔杯”从入门到精通》教材部分章节节选
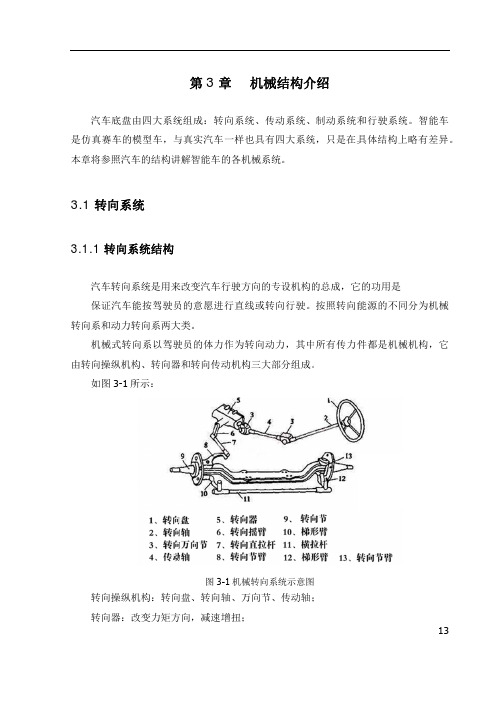
图 3-7 前置 置卧式
16 6
图 3-8 后置卧式
优点:安 安装原车模 模舵机布置方 方式、改动 动量小,重心 心低; 缺点:响 响应速度慢 慢、两边拉杆 杆长度不一 一样、转向不 不对称。 2).扣式
图 3-9 扣式 扣
优点:重 重心低、响 响应速度快、 、转向平顺 顺对称; 缺点:安 安装过程复 复杂、不利于 于后续维护 护调整。 3).卧式
图 3-14匀速圆 圆周运动
转向舵机因 因型号固定 定在供电电 压确定时其 其输出力矩 矩是固定的, ,我们知道 道力矩等于 于 力与 与力臂的乘积 积,即 M=F F*L。舵机 的输出力矩 矩与摆臂长度关系如下 下: 舵机转矩 矩=舵机摆臂 臂作用力*摆臂长度 摆 18 8
假设舵机 机输出力矩 矩是恒定的 ,其输出轴 轴的旋转角 角速度也是恒 恒定的,舵 舵机摆臂端 端 部的 的瞬时线速度 度随舵机摆 摆臂长度增 加而增大。摆臂的瞬 瞬时线速度大 大会导致转 转向系统灵 灵 敏度 度提高,这是 是我们最希 希望得到的。 。 同时,我 我们知道在 在转向时舵机 机摆臂的力 力传递搭到 到横拉杆,横 横拉杆的作 作用力大于 于 轮胎 胎阻力时才开 开始转向,小于或者 等于轮胎阻 阻力时不转 转向。开始转 转向后,横 横拉杆作用 力越 越大轮胎转的 的越快,也 也就是说转向 向响应速度 度越快。 而舵机力 力矩是恒定 定的,舵机摆 摆臂作用力 力与摆臂长 长度是成反比 比的,此长 长彼消。舵 舵 机摆 摆杆不能太长 长也不能太 太短,太短, 响应慢,太长,拉不 不动,响应 应也慢。 最合适的 的舵机摆臂 臂长度值, 可以通过转 转向系统四 四杆机构仿真 真结合实际 际测试来获 获 取。实际测试可 可以选用不 不同长度的舵 舵机摆臂装 装车后测试转 转向灵敏度 度。 获取最佳舵 舵机摆臂长 长度后,可 以对摆臂的 的外形做优 优化以达到减 减重、美观 观的效果。 图 3 3-15 为优化 化后的舵机摆 摆臂,选用 用 1mm 不锈钢板线切 切割成型。 不锈钢板有 有良好的刚 刚 度、韧性,为了 了减重将摆 摆臂中部切除 除一块。
课件

总体设计思路
道路识别采集信号
电源模块 MPU
调试接口 速度检测
直流电机驱动
舵机驱动
1、MPU-----HCS12系列单片机概述
1、1 、 HCS12系列单片机的命名规则 系列单片机的命名规则
表示质量认定状态。 表示完全合格产品, 表示初始产品 表示初始产品, 表示预测试产 ① 表示质量认定状态。MC表示完全合格产品,XC表示初始产品,PC表示预测试产 表示完全合格产品 品。 表示存储器类型。无表示片内带ROM或者片内没有程序存储器,7表示片内带 或者片内没有程序存储器, 表示片内带 ② 表示存储器类型。无表示片内带 或者片内没有程序存储器 EPROM或一次可编程 或一次可编程ROM(OTP ROM), 表示片内带 ),8表示片内带 或一次可编程 ( ), 表示片内带EEPROM,9表示片内带 , 表示片内带 Flash存储器。 存储器。 存储器 表示内核类型。 表示16位单片机 表示8位单片机 ③ 表示内核类型。S12表示 位单片机,S08表示 位单片机。 表示 位单片机, 表示 位单片机。 表示系列。 表示为 系列产品。 表示为D系列产品 ④ 表示系列。DG表示为 系列产品。 表示存储空间大小及版本。 表示128 KB的Flash存储空间,B为Flash版本。 存储空间, 为 版本。 ⑤ 表示存储空间大小及版本。128表示 表示 的 存储空间 版本 表示工作温度范围。无表示工作温度范围是0℃ ⑥ 表示工作温度范围。无表示工作温度范围是 ℃~70℃,C表示工作温度范围 ℃ 表示工作温度范围 表示工作温度范围是 表示工作温度范围是 是40℃~85℃,V表示工作温度范围是40℃~105℃,M表示工作温度范围是40℃~ ℃ ℃ 表示工作温度范围是 ℃ ℃ 表示工作温度范围是 ℃ 125℃。 ℃ 表示封装形式。 表示 引脚QFP封装,PV表示 表示80引脚 封装, 表示 表示112引脚 引脚LQFP封装。 封装。 ⑦ 表示封装形式。FU表示 引脚 封装 引脚 封装 表示无铅标志。 表示芯片生产过程无铅 表示芯片生产过程无铅。 ⑧ 表示无铅标志。E表示芯片生产过程无铅。
飞思卡尔智能车门入资料大全加强板PPT参考课件
• 在以后的设计中可以设计一个电池放电装 置。
2021/3/10
授课:XXX
9
淘宝搜索,学长联盟,获取更多资料!
2.2 各种电源电路部分
2.2.1 5V电路
Evaluation only. ted with Aspose.Slides for .NET 3.5 Client Profile 5.2
Copyright 2004-2011 Aspose Pty Ltd.
2021/3/10
授课:XXX
11
2.2淘.3宝摄搜索像,头学长9V联电盟,路获取更多资料!
Evaluation only. ted with Aspose.Slides for .NET 3.5 Client Profile 5.2
淘宝搜索,学长联盟,获取更多资料!
基于S12微处理器的智能车 硬件设计(电磁组)
Evaluation only. ted with Aspose.Slides for .NET 3.5 Client Profile 5.2
Copyright 2004-2011 A—sp—os和e P谐ty 号Ltd.
2021/3/10
授课:XXX
5
淘宝搜索,学长联盟,获取更多资料!
2.1电源模块
2.1.1电池的使用方法
参数: 电压:1.2×6=7.2 v
容量:2000mAh
放电曲线(在3A的大E电v流a放l电u条a件tio下n得到o的n结ly果.) ted with Aspose.Slides for .NET 3.5 Client Profile 5.2
2021/3/10
设计者:王维琦 同组队员:张文涛、唐传宗
授课:XXX
飞思卡尔智能车简介
智能车制作F R E E S C A L E学院:信息工程学院班级:电气工程及其自动化132 学号:6101113078姓名:李瑞欣目录:1. 整体概述2.单片机介绍3.C语言4.智能车队的三个组5.我对这门课的建议一、整体概述智能车的制作过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作。
内容涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科多专业。
下面是一个智能车的模块分布:总的来说智能车有六大模块:信号输入模块、控制输出模块、数据处理模块、信息显示模块、信息发送模块、异常处理模块。
1、信号输入模块:智能车通过传感器获知赛道上的路况信息(直道,弯道,山坡,障碍物等),同时也通过传感器获取智能车自身的信息(车速,电磁电量等)。
这些数据构成了智能车软件系统(大脑)的信息来源,软件系统依靠这些数据,改变智能车的运行状态,保证其在最短的时间内按照规定跑完整个赛道。
2、控制输出模块:智能车在赛道上依靠转向机构(舵机)和动力机构(电机)来控制运行状态,这也是智能车最主要的模块,这个模块的好坏直接决定了你的比赛成绩。
电机和舵机都是通过PWM控制的,因此我们的软件系统需要根据已有的信息进行分析计算得到一个合适的输出数据(占空比)来控制电机和舵机。
3数据处理模块:主要是对电感、编码器、干簧管的数据处理。
信号输入模块得到的数据非常原始,有杂波。
基本上是不能直接用来计算的。
因此需要有信号处理模块对采集的数据进行处理,得到可用的数据。
4信息显示模块:智能车调试过程中,用显示器来显示智能车的部分信息,判断智能车是否正常运行。
正式比赛过程中可关闭。
主流的显示器有:Nokia 5110 ,OLED模块等,需要进行驱动移植。
5信息发送模块智能车的调试过程中,我们需要观察智能车的实时状态(采集的信号是否正常,输出是否正常),这个时候就需要用到信息发送模块,将智能车运行时的数据发送到电脑上就行分析处理。
飞思卡尔智能车
飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。
飞思卡尔智能车入门资料大全概要
1.2.2 动手能力和创新能力 常见电源电路和驱动电路设计 新的一些寻迹算法的提出等
二、硬件系统设计与实现
1)电源部分 2)电机驱动部分 3)舵机部分 4)图像采集部分 5)测速部分
1k
OUT1 CC P1 OUT2 33n VS S VS S D1 D2 47uF 47u VS S C3 0.1u GND GND C1 GND
GND 6 5 4 3 2 1 GND VC C PWM7 PWM5 D2 D1
20 DNC 4 V+ 5 V+ 16 V+ 18 D1 13 D2
R2 VC C
正确放电:
由于镍镉电池具有记忆效应,对电池的不完全放电将会人 为的降低电池的电容量; 从放电曲线可以看出,随着电池电量的减少,其电压也会 逐渐降低,当电压降低到某个阈值后继续放电,电池电压 将很快的跌落。这个阈值就是电池的放电下限电压。厂家 给出了放电下限电压为6V。因此,在使用时,建议在动力 车的电源设计中加入电池保护电路,当电池电压低于6V时 切断电路,用来保护电池。如果没有保护电路,要注意, 电池接通时人不要离开。因为当电池电压降到接近6V时, 电池已经给不出多少电流,已经没有能力驱动电机了,此 时一定要及时断开电路,到了给电池充电的时候了。
舵机控制方法
三线连接方式 红线:电源线+6V 蓝线:地线 黑线:PWM控制信号
2.2.2驱动芯片BTS7960/7970组成的电路
大功率驱动芯片BTS7970特性如下: 输入电压:6v---24v 输出电流: 最大可达60A 内阻:16毫欧 控制线电压: 5v PWM控制频率:25K
智能小车硬件介绍PPT课件
理 想 情 况 下 , CC D 器 件 受S均匀Q光SA照T /时Es, 输 出 信 号 幅 度 完 全 一 样 。 实 际
上,由于半导体材料不均匀和工艺条件因素影响,在均匀光照下,CCD器 件的输出幅度出现不均匀现象。
第20页/共71页
图像传感器
(3)分辨率
分辨率是用来表示分辨图像中明细细节的能力的。它通常有两种不同的 表示方式:
,如图所示,定义调制A度m ax M 为 Am
第21页/共71页
图像传感器
M Amax Amin Amax Amin
(2.4)
图2.4 调制度的定义
第22页/共71页
图像传感器
调幅波信号通过器件传递输出后,通常调制度受到的损失减小。一般来 说,调制度随空间频率增加而减小。为了客观地表示CCD传感器的分辨率 ,一般采用调制传递函数(Modulation Transfer Function, MTF)来 表示。MTF的定义为:在各个空间频率下,CCD器件的输出信号的调制 度与输入信号的调制度的比值,即
第12页/共71页
光电式传感器
2.主要性能 光电器件的性能主要由伏安特性、光照特性、光谱特性、响应时间、
峰值探测率和温度特性来描述。其中,伏安特性、光照特性和光谱特性是 选择光电器件的主要指标。
(1)光电管的伏安特性 在一定的光照射下,对光电器件的阴极所加电压与阳极所产生电流之间
的关系称为光电管的伏安特性。它是应用光电式传感器参数的主要依据。
第27页/共71页
图像传感器
图2.5 摄像头视频信号
第28页/共71页
PAL信号
第29页/共71页
back
第30页/共71页
图像传感器
智能车

产品形象(产品价格) 产品形象(产品包装) 产品形象(产品功能)
产品形象(产品质量)
产品形象(产品经济性) 产品形象(产品安全性) 产品形象(产品原材料优劣)
36.24
36.73 35.72 35.94
80.549
81.922 82.623 81.729
0.351
0.206* 0.374 0.365
0.184
0.164 0.288 0.241
0.661
0.668 0.658 0.659
*
Part 1
Part 2
Part 3
Part 4
认知的影响因素分析(基于因子)
信度分析
文化传承量表(a=0.601)
项已删除的 刻度均值
文化传承(产地风俗习惯)
文化传承(产地历史积淀) 文化传承(流传着许多生动的故事)
.199 .303 .420 .356
项已删除的 Cronbach's Alpha值
.737 .674 .631 .675
6.51 6.55 6.52 6.55
Part 1
Part 2
Part 3
Part 4
认知的影响因素分析(基于因子)
效度分析
修正前总量表的效度
取样足够度的Kaiser-Meyer-Olkin度量
调试
改造
比赛
1
理论基础 贝尔模型 集群品牌形象特点 相关文献资料
2
3
*
4
影响因素分析 样本特征分析 认知分析 因子分析 信效度分析……
SUGGESTION
Part 1
Part 2
Part 3
Part 4
总结
分析可知,产品形象、产品形象、区位环境以及文化传承是提升公众对品牌价值和辨识度 的重要因素。而产业形象统一、产品区位环境的凸显、产品形象的和文化传承的凝练和提 升需要通过建立区域品牌才能实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前轮调整
• 前轮前束 • 所谓前束是指两轮之间的后距
离数值与前距离数值之差,也 指前轮中心线与纵向中心线的 夹角。前轮前束的作用是保证 汽车的行驶性能,减少轮胎的 磨损。前轮在滚动时,其惯性 力会自然将轮胎向内偏斜,如 果前束适当,轮胎滚动时的偏 斜方向就会抵消,轮胎内外侧 磨损的现象会减少。
前轮调整
其他调整
• 减震弹簧调整 • 改变减震弹簧
的预紧力可以 改变底盘的刚 度,从而改变 行驶的效果。 • 飞思卡尔车模 的弹簧预紧力 可以通过垫圈 的个数来调节。
其他调整
• 悬架高度调整 • 飞思卡尔车模前轮与后轮的悬架的高度均可调。 • 前轮是通过改变垫圈的个数来调节。 • 后轮是通过安装不同高度的支架来调节。
前轮调整
前轮是转向轮,它的安装位置由主销内倾、主销后倾、前轮外倾和前轮前束等 4个项目决定
前轮调整
• 主销内倾
主销内倾是指主销装在前 轴略向内倾斜的角度,它 的作用是使前轮自动回正。 角度越大前轮自动回正的 作用就越强烈,但转向时 也越费力,轮胎磨损增大; 反之,角度越小前轮自动 回正的作用就越弱,因此 这个主销内倾角都有一个 范围,约5°~8°之间。
前轮调整
• 主销后倾 • 在飞思卡尔车模
上,主销后倾角 由前轮悬挂的垫 片来调节。在两 侧安装数量不同 的垫片,可以调 节主销后倾角。
前轮调整
• 主销内倾和主销后倾都有使汽车转向自动回正, 保持直线行驶的功能。不同之处是主销内倾的回 正与车速无关,主销后倾的回正与车速有关,因 此高速时后倾的回正作用大,低速时内倾的回正 作用大。
前轮调整
• 主销内倾 • 在飞思卡尔车模
上,主销内倾角 由前轮悬挂上的 螺纹来调节。
前轮调整
• 主销后倾 • 主销后倾是指主销装在前轴,上端略向后倾斜的角
度。这与摩托车的前轮向后倾的道理一样,它使车 辆转弯时产生的离心力所形成的力矩方向与车轮偏 转方向相反,迫使车轮偏转后自动恢复到原来的中 间位置上。由此,主销后倾角越大,车速越高,前 轮稳定性也愈好。但后倾角大也会使转向费力,因 此主销后倾角也有一个范围,一般不大于3°。
• 伺服器: FUTABA3010 • 重量 41 [g] • 输出扭矩: 6.0V 时 6.5 + 1.3 [ Kg.cm] • 动作速度 6.0V 时 0.16 + 0.02 [Sec/60 度] • 使用电压范围: 4.0 ~ 6.0 [V]
• 电机:RS380-ST/3545 • 直径Ф27.5 mm, • 机身长度32.5 mm, • 输出轴直径Φ2.3 mm,
飞思卡尔智能车 机械结构简介
By 机械组
CoБайду номын сангаасtent
• 车模种类 • 主要参数 • 前轮调整 • 后轮调整 • 其他调整
车模种类
A型车
车模种类
B型车
车模种类 C型车
主要参数
• 以去年电磁组所用的A型 车为例
• 车模代号: G768 • 整体尺寸:长275,宽
165,轮径52mm
主要参数
That’s all , thank you!
PPT制作:陈天健
谢谢!
• 前轮前束 • 在飞思卡尔车模上,
前轮前束由拉杆的 螺纹来调节。
后轮调整
• 差速器调整 • 汽车在拐弯时,左右两
轮的转速不同,差速器 的作用就是利用“能量 最低原理”,自动分配 两轮的转速,使汽车平 稳过弯。
后轮调整
• 差速器调整 • 飞思卡尔智能车使用的是滚珠差速器,虽然差
速效果不及行星轮差速器,但如果调整得好的 话,足以满足车模的需要。 • 飞思卡尔车模的差速器的松紧程度可以通过后 轮的紧固螺母来调节。