电磁组小车原理图
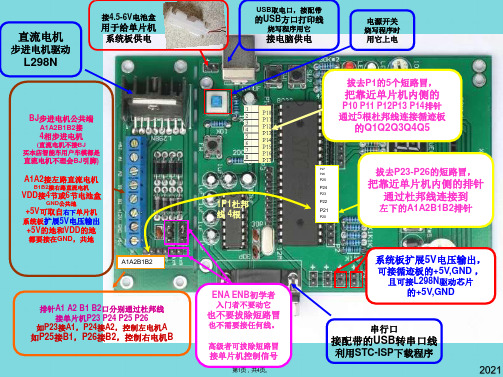
小车接线图必看(与“电机”有关优秀PPT)
B1
B2 通小左P1过车下0 5用 的P根1于A1杜1焊PA邦12接2B线P电11连B机32接P排且1循针与4迹排接板针线柱连两线根的线,1、可以用杜邦线把两头黑色夹头拔掉,露出锡线,一头焊接到电机,一头接到蓝色接线柱。
s左b下it P的2A3=1PA2^B31;B//单2排片针机输出到L298N控制电机左后退
• sbit P11=P1^1;//循迹传感器次左有测得信号 • sbit P12=P1^2;//循迹传感器中有测得信号 • sbit P13=P1^3;//循迹传感器次右有测得信号 • sbit P14=P1^4;//循迹传感器最右有测得信号 • sbit P23=P2^3;//单片机输出到L298N控制电机左后退
A2
B1 B2
小车用于焊接电机且 与接线柱连线的线, 1、可以用杜邦线把 两头黑色夹头拔掉, 露出锡线,一头焊接 到电机,一头接到蓝 色接线柱。2、可以 直接用本店配送的黑
色细线。
VDD
4节电池盒
GND +5V
将2组电源共 地线用接线柱 卡紧
2P连线白色头接扩展5V电压输 出注意正负极
第4页,共4页。
共地用接
6节电池盒
+5V
线柱卡紧
2P连线白色头接扩展5V电 压输出注意正负极
第3页,共4页。
入门小车48元寻迹方案
小车原配的2节电池盒,由于 供电小可不用它。
小车左侧电机自行焊接两 根线上去,两线另一头接
蓝色的A1A2接线柱
小车右侧电机自行焊接两根 线上去,两线另一头接蓝色 的B1B2接线柱
+BJ A1
+5V的地和VDD的地
都要接在GND,共地
A1A2B1B2
排针A1 A2 B1 B2口分别通过杜邦线 接单片机P23 P24 P25 P26
电磁小车

一.绪论 (1)1. 概述 (1)2. 国内外现状 (1)二.关键技术介绍 (2)1. 专有名词介绍 (2)2. 关键技术介绍 (3)三.具体内容 (4)1. 主要材料 (4)2. 功能实现 (4)四.项目总结 (5)一.绪论1. 概述2013年7月,美国电动汽车公司Tesla(特斯拉)和美国科技公司ET3相继公布的“超级高铁”设想和“胶囊列车”计划。
虽然名称不同,二者的核心原理一样,利用“真空管道运输”的概念,建造一种全新的交通工具。
这种列车车行速度是飞机的两倍,子弹头列车的3至4倍;置身“胶囊”车厢,像炮弹一样从车站发射,逐渐加速至每小时6500公里,从纽约至北京只需2小时,环球旅行也仅6小时。
它的工作原理是在地表稠密的大气层中,高速交通工具运行时受到接触摩擦和空气摩擦的影响要提升速度只有降低摩擦。
真空管道运输就是在地面或地下建造一条密闭的管道,用真空泵将其抽成真空或部分真空,利用磁浮技术使运载工具在其中无接触、无摩擦地运行,达到点对点的传送运输。
”2. 国内外现状ET3公司正在美国建造一个长达4.8公里、时速为6500公里的模拟系统,计划在2013年底前建成并试验“胶囊”旅行的概念。
而特斯拉公司则将“超级高铁”形容为“协和式飞机、轨道炮和空气曲棍球台的结合体”,其设想细节和具体方案将在2013年8月12日公开揭晓。
早在1922年,德国工程师赫尔曼·肯培尔在提出磁浮列车概念时,同时提出“真空管道”的设想,认为采用管道抽真空的办法可以实现磁浮列车速度每小时1000公里的目标值。
2003年,日本高速磁浮列车在总长18.4公里的试验线路上达到的实验运行最高速度为每小时581公里。
在中国,早在2005年,西南交通大学成立真空管道运输研究所,正式启动中国真空管道运输领域的研究和开发。
基于胶囊列车的巨大发展前景,我们用模拟的小车来实现电磁驱动力,为以后实现真空无摩擦磁浮列车做好前期准备。
二.关键技术介绍1. 名词介绍一般用途的漆包线(普通线):主要用于一般电机、电器、仪表、变压器等工作场合的绕组线,如聚酯漆包线、改性聚酯漆包线。
科技小制作 DIY趣味磁力小车(带图)

儿童智力开发自制玩具小制作DIY趣味磁力小车
趣味磁力小车原理:每一块磁铁都有正负两极之分的,磁铁周围是存在着磁场的。
当两块磁铁的同极相互接近时,由于磁场的互斥作用,两块磁铁就相互分开;当两块磁铁的不同极相互接近时,在磁场的作用下,它们就会吸引到一块。
简单来说,磁铁的吸引与排斥是由于磁铁中的磁场作用产生的。
这也是物理中说的同极相斥,异极相吸!小朋友,你们知道吗?快来动手做这个有趣的实验吧!
1.准备材料:雪糕棍、打好孔的木方、车轮、光杆、磁铁、502胶水、白乳胶、双面胶
2.如图安装车轮
3.如图粘磁铁(注意粘的时候要让两块磁铁互相排斥)
4.把粘好磁铁的木方粘到安装好车轮的木方上面
5.OK啦!快试试看磁力小车能不能动起来吧。
电磁动力小车工作原理

电磁动力小车工作原理
电磁动力小车是由磁铁、导线、开关等几部分组成的。
它的工作原理是:小车在旋转时,由于磁铁的吸力作用,线圈中会产生电流。
在通电线圈中就会产生磁场,这个磁场就像一只手,推着小车在磁场中转动。
同时,小车的运动通过导线与开关相连,通过开关来控制线圈电流的大小和方向。
当通电线圈中有电流通过时,就会产生电磁磁力。
这个电磁磁力会推动小车带动电机转动。
我发现,原理并不复杂!在电路中增加一个闭合回路,当线圈通电时,就会产生感应电动势(也叫感生电动势),线圈中就会产生电流(也叫电动势)。
当线圈断电时,这个感应电动势就会把小车从磁场中拉出来。
我还发现了一个小秘密:在电路中加入一个电容就可以有效地降低感应电动势的大小。
这是因为电容有容抗这个特性。
所以当用导线把开关和磁铁连接起来时,在磁铁的作用下就可以推动小车运动。
—— 1 —1 —。
简易电磁循迹智能小车

应用场景
教育实验
作为教学实验设备,帮 助学生了解电磁感应、
自动控制等原理。
科研项目
作为研究平台,用于探 索智能车辆、传感器技
术等领域的研究。
自动化运输
在特定场景下,如工厂 、仓库等,用于物品的
自动运输和分拣。
娱乐设备
作为玩具或表演道具, 提供智能化的行驶体验
。
02
硬件组成
控制器
控制器是小车的核心部件,负 责接收指令并控制小车的运动 。
详细描述
在智能小车上安装无线接收模块,通过遥控器发送控制信号,实现对小车的远 程控制。遥控器可以控制小车的启动、停止、转向以及速度调节等操作。
THANKS
感谢观看
常见的电磁信号处理算法有滤波、阈值判断、波形识别等,它们可以根据实际情况 进行选择和调整。
电磁信号处理算法还需要考虑噪声和干扰的影响,以及不同材质和环境条件下的变 化,以确保智能小车的准确性和可靠性。
04
调试与优化
调试步骤
01
02
03
04
硬件检查
检查小车的硬件连接是否正确 ,包括电机、电池、传感器等
案例二:自动避障功能演示
总结词
智能小车在行驶过程中能够自动识别障碍物并实现避障。
详细描述
通过在小车前方安装红外或超声波传感器,当小车接近障碍 物时,传感器能够检测到障碍物的存在并发送信号给控制器 ,控制器根据接收到的信号调整小车的行驶方向,实现自动 避障功能。
案例三:无线控制功能演示
总结词
通过无线遥控器对智能小车进行远程控制。
。
软件编程
根据设计要求编写控制程序, 确保小车能够按照预设路径行
驶。
测试运行
磁力小车-磁铁的特性

有磁性 有极性
磁铁的两极
磁铁同极相互排斥,异极相互吸引
问题: 不接触小车,用磁铁既可以把它
拉过来,又可以把它推出去,是为什 么呢?
磁力小车运动的原理
磁力小车采用磁铁磁力做动力,利用磁铁同极 相斥,异极相吸的特性,通过小朋友手中磁力棒正 反面产生一个推或拉的力,从而使小车运动。
下面我们就一起来制作磁力小车吧!
1.认识零件,注意区分各零件的型号及规格
2.在固位板的四个角用用螺丝安装小轴架
3.将铁轴穿过小轴架上面的孔,然后安装车轮
4.用螺丝固定大轴架Fra bibliotek5.使用泡沫胶固定磁铁,注意磁铁的极性
6.制作完成,测试
1、你还可以用磁铁做出哪些科技模型? 2、磁铁在生活中的应用有哪些?
小车控制电路原理图
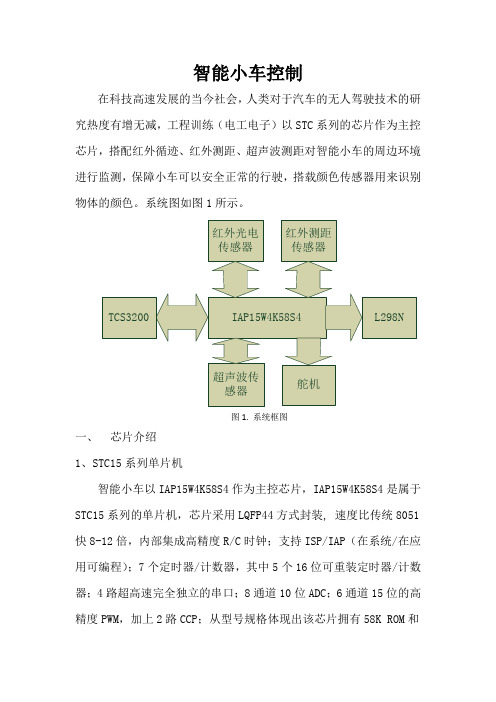
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
寻迹小车各模块电路原理图
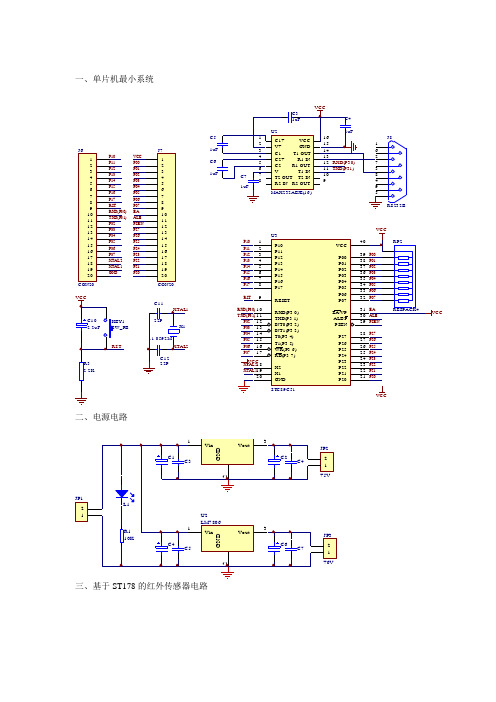
一、单片机最小系统
二、电源电路
U1
三、基于ST178的红外传感器电路
+5
注意事项:
1、请首先查询ST178的器件手册,确定各引脚的功能,然后再对照电路原理图焊接。
2、建议首先设计PCB ,然后根据PCB 焊接实物。
四、基于LM324的比较器电路(输出高电平5v ,低电平)
P 10
五、电机驱动电路
注意事项:
1、图中的Rs3、Rs4、Rq1、Rq2不要省,否则可能因为单片机带负载能力不强而不能正常工作。
2、在写程序时,不能让Qi 、Hi 同时为低电平,否则会使Q9~Q12短路导通,并很快被烧毁。
同理,不能让Li 、Ri 同时为低电平。
3、建议首先画出PCB ,然后根据PCB 焊接电路。
4、建议同学们先焊接图中的上半部分所示的一路驱动电路,测试成功后再焊接下半部分那一组电机驱动电路。
电磁组智能车siminar课堂研讨PPT
参赛感言
智能车seminar
Thanks for your attention!
1.硬件框架
变化的磁 场
LC选频回路
放大电路
检波电路
AD转换
AD 采集
智能车seminar
四、电磁传感器的硬件电路——how to achieve?
2.LC选频
10mH
谐振频率
市场通常能够买到的是6.8nF
智能车seminar
四、电磁传感器的硬件电路——how to achieve?
3.放大 4.整流检波
目的:获取1~5V的直流电压(被测信号幅度)
Our work 中期验收用——电磁传感器
后期调试代码用——电磁传感器
智能车seminar
四、电磁传感器的硬件电路——how to achieve?
Show out work~~
智能车seminar
四、电磁传感器的硬件电路——how to achieve?
智能车seminar
二、电磁传感器的工作原理——how to do?
2.路径检测
法拉第电磁感应定律
d dB NA dt dt
0 I B 2 r
测量空间任意点磁场的水平和 垂直分量
1 dI k r dt
k 与线圈摆放方法、线圈面积等有关的常量
与r 成反比,因为I是振荡
接受功率很小,检测点 可认为是缓变磁场
0 I 2 r
智能车seminar
二、电磁传感器的工作原理——how to do?
2.路径检测
磁场传感器 (1) 电磁感应磁场测量方法:电磁线磁场传感器,磁通门磁场传感器, 磁阻抗磁场传感器。 (2) 霍尔效应磁场测量方法:半导体霍尔传感器、磁敏二极管,磁敏三极 管。 (3) 各向异性电阻效应(AMR)磁场测量方法。 (4) 载流子自旋相互作用磁场测量方法:自旋阀巨磁效应磁敏电阻、自旋 阀三极管磁场传感器、隧道磁致电阻效应磁敏电阻。 (5) 超导量子干涉(SQUID)磁场测量方法:SQUID 薄膜磁敏元件。 (6) 光泵磁场测量方法:光泵磁场传感器。 (7) 质子磁进动磁场测量方法。 (8) 光导纤维磁场测量方法。
小车控制电路原理图
智能小车控制在科技高速发展的当今社会,人类对于汽车的无人驾驶技术的研究热度有增无减,工程训练(电工电子)以STC系列的芯片作为主控芯片,搭配红外循迹、红外测距、超声波测距对智能小车的周边环境进行监测,保障小车可以安全正常的行驶,搭载颜色传感器用来识别物体的颜色。
系统图如图1所示。
图1. 系统框图一、芯片介绍1、STC15系列单片机智能小车以IAP15W4K58S4作为主控芯片,IAP15W4K58S4是属于STC15系列的单片机,芯片采用LQFP44方式封装,速度比传统8051快8-12倍,内部集成高精度R/C时钟;支持ISP/IAP(在系统/在应用可编程);7个定时器/计数器,其中5个16位可重装定时器/计数器;4路超高速完全独立的串口;8通道10位ADC;6通道15位的高精度PWM,加上2路CCP;从型号规格体现出该芯片拥有58K ROM和4K RAM。
实物图如图2所示。
图2. IAP15W4K58S4实物图2、颜色传感器TCS3200颜色传感器TCS3200是TAOS公司推出的可编程彩色光到频率的转换器,采用8引脚表面贴装形式封装(如图3所示),它把可配置的硅光电二极管与电流频率转换器集成在单一的CMOS电路上,同时在芯片上集成四种不同的滤光器:红、绿、蓝(RGB)三种滤光器各16个,不带任何过滤器16个。
为了保证能够尽量减少入射光辐射不平衡,这64个过滤器是交叉排列,从而可以提高颜色识别率。
由于可以驱动标准的TTL或CMOS逻辑输入,所以可直接与MCU或其他逻辑电路相连接,并且可以直接输出数字量,并且能够实现每个彩色信道10位以上的转换精度,因而不再需要A/D转换电路,使电路变得更简单。
图3. TCS3200实物图TCS3200颜色传感器原理图如图4所示,利用三原色理,采集被测物的颜色,即各种颜色都是有三种颜色组成的,通过对芯片的S2、S3引脚编程选择不同的滤波器,它只能让某种特定的原色通过,经过电流到频率转换器后输出不同的方波,不同的颜色和光强对应不同频率的方波。
电磁组小车课程设计

电磁组小车课程设计一、课程目标知识目标:1. 学生能理解电磁感应的基本原理,掌握电磁组小车的工作机制。
2. 学生能描述电磁组小车的电路构成,解释各部分功能及其相互关系。
3. 学生能运用物理公式计算电磁组小车的运动参数,如速度、加速度等。
技能目标:1. 学生能够独立组装并调试电磁组小车,解决在组装过程中遇到的技术问题。
2. 学生能够运用所学的物理知识对电磁组小车的性能进行优化,提高其运动效率。
3. 学生能够通过实验操作,收集数据,并对电磁组小车的性能进行分析和评估。
情感态度价值观目标:1. 学生在课程中培养对物理学科的兴趣,增强学习动力。
2. 学生在团队协作中,学会沟通、分享、尊重他人意见,培养合作精神。
3. 学生在探索电磁组小车的过程中,体验科学研究的艰辛与快乐,增强自信心和创新能力。
4. 学生能够关注电磁组小车在现实生活中的应用,认识到物理知识在实际问题解决中的价值。
本课程针对初中年级学生,结合物理学科特点,注重理论知识与实际操作相结合。
课程要求学生在掌握基本概念和原理的基础上,能够动手实践,解决问题,从而达到预期的学习成果。
在教学过程中,教师需关注学生个体差异,提供个性化指导,确保每个学生都能在课程中取得进步。
二、教学内容1. 电磁感应原理:通过课本相关知识,介绍法拉第电磁感应定律,理解电磁感应现象及其在电磁组小车中的应用。
- 教材章节:第五章“电磁感应”- 内容列举:法拉第电磁感应定律、感应电流的产生、洛伦兹力的作用。
2. 电磁组小车电路构成:分析电磁组小车的电路结构,了解各部分功能及其相互关系。
- 教材章节:第七章“简单电路”- 内容列举:电路元件、电路图的识别、电路连接方式。
3. 电磁组小车组装与调试:指导学生按照电路图组装电磁组小车,并进行调试。
- 教材章节:第八章“实践与探究”- 内容列举:组装步骤、调试方法、故障排查。
4. 电磁组小车性能分析与优化:运用物理知识,对电磁组小车的性能进行实验分析,并提出优化方案。
智能小车电磁组技术报告

校内“飞思卡尔”竞速小车电磁组参赛成员:08季庚午(物理)08栾忠飞(电气)09郭鹏(物理)09王丽颖(电气)10范乐鹏(电气)指导老师:小车指导团队目录1 摘要-----------------------------------------------------------------------22 系统完成功能-----------------------------------------------------------23 系统方案论证-----------------------------------------------------------23.1系统总体方案------------------------------------------------------------------------------2 3.2.1硬件部分-----------------------------------------------------------------------------------2 3.2.2机械部分-----------------------------------------------------------------------------------2 3.2.3软件部分-----------------------------------------------------------------------------------2 3.2方案比较与论证----------------------------------------------------------------------------34 硬件结构设计及实现-------------------------------------------------44.1单片机----------------------------------------------------------------------------------------4 4.2路径信息采集模块-------------------------------------------------------------------------4 4.3舵机及电机驱动模块----------------------------------------------------------------------4 4.4测速模块-------------------------------------------------------------------------------------4 4.5电源系统-------------------------------------------------------------------------------------44.6单片机最小系统电路----------------------------------------------------------------------45 软件结构设计及实现--------------------------------------------------75.1寻迹算法-------------------------------------------------------------------------------------7 5.2舵机转角控制算法-------------------------------------------------------------------------7 5.3电机转速控制算法-------------------------------------------------------------------------7 5.4测速算法-------------------------------------------------------------------------------------2 5.5舵机PID控制算法-------------------------------------------------------------------------25.6电机PID控制算法-------------------------------------------------------------------------26 作品检测数据-----------------------------------------------------------107 不足及今后改进方向-------------------------------------------------10 附1 源程序----------------------------------------------------------------11 附2 小车图片-------------------------------------------------------------231 摘要第五届飞思卡尔杯智能汽车大赛首次加入了基于电磁传感器的寻线智能车,在地面铺设通有交变电流的引导线,在引导线周围激起交变的磁场,从而通过检测此磁场引导车辆行驶。
西南科技大学西科四队技术报告(电磁组)
1.2 系统设计框架介绍
系统是以检测电磁场信号为基础,通过单片机处理信号实现对车体控制,
-1-
第八届全国大学生智能汽车竞赛技术报告
实现车体能够准确沿着预设路径寻迹。系统电路部分需要包括单片机控制单元、 电机驱动电路、电磁传感器电路等部分。综上所述,本智能车系统包含了以下 几个模块:电源管理模块、 MCU 模块、信号放大模块、电机驱动模块、舵机控 制模块、速度测量模块、按键输入模块等。在整个系统中,由电源管理模块实 现对其他各模块的电源管理。其中对测速电路、信号放大检波模块按键输入模 块提供 5V 电压,对舵机提供 6V 电压,对微控制器提供 3.3V 电压。路径识 别模块则采用电感感应循迹方案。即路径识别电路由 6对电感电容对组成。由 于赛道中存在循迹引导漆包线,位于漆包线正上方和偏离漆包线正上方的电感 感应到的信号强弱有所不同,由此判断漆包线的位置从而通过微处理器处理判 断后为行车提供方向。转速测量模块则安装在车后部与电机并排设置,它会测 量出模型车行驶过程中的当前速度,为设定车速的调整提供依据。 本模型车是 后轮驱动,通过自制全桥驱动电路,控制动力电机的正向运行和反向制动,为 智能车的运动提供强劲的动力和制动力。通过按键设定模型车在行驶过程中一 些状态。串口传送模块发送传感器检测值等参数,以方便对整车进行调试。MCU 模块会根据路径识别模块采集到的模拟电压值以及转速测量模块反馈回的瞬时 速度值等综合分析,采用一定的算法对舵机和直流电机进行控制,以达到智能 车快速稳定的沿赛道运行的目的。
参赛队员签名:
王介阳 王 静
李得亮 带队教师签名: 日 期:
目录
第一章 引言 ......................................................................................... - 1 1.1 大赛介绍 ..................................................................................................................... - 1 1.2 系统设计框架介绍 ...................................................................................................... - 1 -
飞思卡尔智能车电磁组技术报告
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文以第十届全国大学生智能车竞赛为背景,介绍了基于电磁导航的智能赛车控制系统软硬件结构和开发流程。
该系统以Freescale半导体公司32 位单片机MK60DV510ZVLQ100为核心控制器,使用IAR6.3程序编译器,采用LC选频电路作为赛道路径检测装置检测赛道导线激发的电磁波来引导小车行驶,通过增量式编码器检测模型车的实时速度,配合控制器运行PID控制等控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
同时我们使用集成运放对LC选频信号进行了放大,通过单片机内置的AD采样模块获得当前传感器在赛道上的位置信息。
通过配合Visual Scope,Matlab等上位机软件最终确定了现有的系统结构和各项控制参数。
实验结果表明,该系统设计方案可使智能车稳定可靠运行。
关键字:MK60DV510ZVLQ100,PID控制,MATLAB,智能车第十届全国大学生智能汽车邀请赛技术报告目录第一章引言 (5)第二章系统方案设计 (6)2.1系统总体方案的设计 (6)2.2系统总体方案设计图 (6)电磁传感器模块 (7)控制器模块 (7)电源管理模块 (7)编码器测速模块 (7)舵机驱动模块 (8)起跑线检测模块 (8)人机交互模块 (8)测距模块 (8)第三章机械结构调整与优化 (8)3.1智能车前轮定位的调整 (8)主销后倾角 (9)3.1.2主销内倾角 (9)3.1.3 前轮外倾角 (10)3.1.4 前轮前束 (10)3.2 舵机的安装 (11)3.3编码器安装 (12)3.4车体重心调整 (12)3.5传感器的安装 (13)3.6测距模块的安装 (14)第四章硬件电路设计 (15)4.1单片机最小系统 (15)4.2电源管理模块 (16)4.3电磁传感器模块模块 (17)4.3.1 电磁传感器的原理 (17)4.3.2 信号的检波放大 (18)4.4编码器接口 (19)4.5舵机驱动模块 (20)4.6电机驱动模块 (20)4.7人机交互模块 (21)第五章控制算法设计说明 (22)5.1主要程序流程 (22)5.2赛道信息采集及处理 (23)5.2.1 传感器数据滤波及可靠性处理 (23)5.2.2 位置偏差的获取 (25)5.3 控制算法实现 (27)5.3.1 PID算法原理简介 (27)5.3.2基于位置式PID的方向控制 (31)5.3.3 基于增量式PID和棒棒控制的速度控制 (31)5.3.4 双车距离控制和坡道处理 (33)第六章系统开发与调试 (34)6.1开发环境 (34)6.2上位机显示 (35)6.3车模主要技术参数 (36)第七章存在的问题及总结 (37)7.1 制作成果 (37)7.2问题与思考 (37)7.3不足与改进 (37)参考文献 (38)附录A 部分程序代码 (39)第十届全国大学生智能汽车邀请赛技术报告第一章引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
简易电磁循迹智能小车ppt课件

Transition Page
简介概要
技术背景
智能汽车这个概念是在半个世纪前提出,一些发达国家如德国、美国、 英国已将智能汽车用于社会服务,其拥有强大的控制、识别能功能。智 能汽车不仅可以用于生产、服务,大幅度提高我们的工作效率,同时给 予人们更多地便利及安全保障。智能汽车将会对未来交通系统带来巨大 的变革。然而目前所需要解决的最大问题便是无人驾驶汽车的安全问题。
已知感应电动势的频率为f=20 kHz,感应线圈电感为 L= 10 mH ,可以计算出谐振电容的容量为:
标称电容与上述容值最为接近的电容为 6.8nF,所以在 实际电路中我们选用 6.8nF 的独石电容作为谐振电容。该电 容虽然误差比较大,测试中15个电容里面误差最小的都有 1453pF,但价格便宜。
过渡页
Transition Page
1
制作过程 2
3
第一阶段:课程设计题目分析、文献查询和 咨询阶段
第二阶段:电路设计、元器件采购及电路板 PCB设计阶段
第三阶段:焊接电路及调试阶段
过渡页
Transition Page
通过在跑道上测试,本设计基本达到了课程设计要求。 但其中也有不足之处。首先小车在行进途中会出现左 右晃动的情况,通过分析,是由于对感应部分的放大 电路没有达到要求,当导线位于两电感线圈中间时, 产生的感应电动势极其微小,放大倍数不高,以至于 后面的逻辑判断不能准确定位。其次对于小车行驶速 度也有待提高,起初为了防止小车因速度过快不能及 时反应而脱离跑道,因此在电机驱动电路上选择稍大 电阻,以减小电流。整体而言,整个设计所需成本较 低,功能也基本完善,在后续的学习和工作中,我将 进一步改进传感器电路,加大探测范围,提升小车速 度,来提升智能车的性能。
电磁动力小车原理

电磁动力小车原理
电磁动力小车是一种利用电磁力推动行驶的小型交通工具。
其原理是利用电磁感应产生电流,通过电流的流动产生的磁场与外部磁场相互作用,从而产生推动力。
常见的电磁动力小车由电池、电路、电磁铁和轮子等组成。
电路中的电流通过电磁铁产生磁场,这个磁场与地面的磁场相互作用,从而产生推动力,使得小车向前移动。
根据不同的设计,小车可以通过改变电路中电流的方向来改变运动方向或速度。
电磁动力小车具有环保、节能、无噪音等优点,在现代城市短距离交通中有着广泛的应用前景。
- 1 -。