智能车原理图
智能车设计原理及电路图
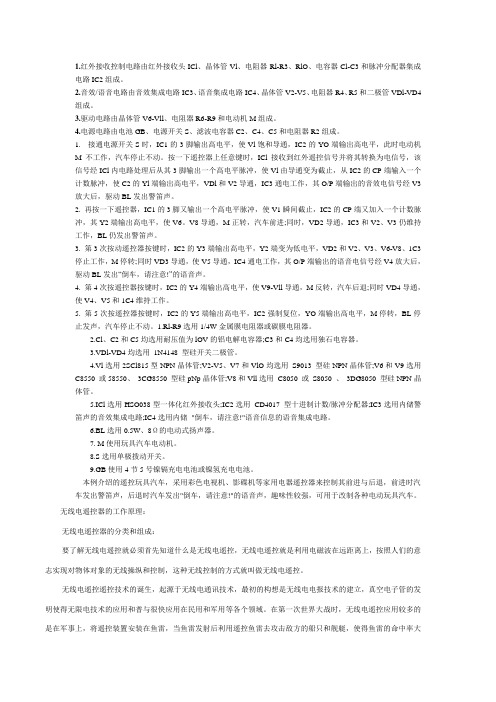
1.红外接收控制电路由红外接收头ICl、晶体管Vl、电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器集成电路IC2组成。
2.音效/语音电路由音效集成电路IC3、语音集成电路IC4、晶体管V2-V5、电阻器R4、R5和二极管VDl-VD4组成。
3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、C4、C5和电阻器R2组成。
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO端输出高电平,此时电动机M不工作,汽车停止不动。
按一下遥控器上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号经ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截止,从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl和V2导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后,驱动BL发出警笛声。
2. 再按一下遥控器,IC1的3脚又输出一个高电平脉冲,使V1瞬间截止,IC2的CP端又加入一个计数脉冲,其Y2端输出高电平,使V6。
V8导通,M正转,汽车前进;同时,VD2导通,IC3和V2、V3仍维持工作,BL仍发出警笛声。
3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平,VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动BL发出“倒车,请注意!”的语音声。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端输出高电平,M停转,BL停止发声,汽车停止不动。
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。
2.Cl、C2和C5均选用耐压值为lOV的铝电解电容器;C3和C4均选用独石电容器。
人工智能无人驾驶ppt课件

04
自动驾驶汽车的软件设计
Software design of autonomous vehicle
控制算法:设计合适的控制算 法,实现车辆的平稳行驶和安 全驾驶。
传感器融合技术
通过将多种传感器(如激光雷达、摄像头、毫米波雷达等)的数据进 行融合,提高无人驾驶车辆对周围环境的感知能力。
深度学习算法
摄像头在无人驾驶中的作用不可忽视。
摄像头可以实时捕捉路况信息,如行人、车辆、交通信号等, 为无人驾驶决策提供重要依据。据统计,每万辆自动驾驶汽车 每天可产生约25TB的数据,其中大部分来自摄像头。
传感器技术的发展将推动无人驾驶的普及。
随着传感器技术的进步,无人驾驶的性能将得到提升,成本将 进一步降低,从而推动无人驾驶的广泛应用。据预测,到 2030年,全球无人驾驶市场规模将达到1.6万亿美元。
深度学习算法在无人驾驶系统中广泛应用,通过对大量数据的 学习,实现对环境的感知、理解和决策。
5G通信技术
5G通信技术为无人驾驶提供高速、低延迟的网络连接,保证数 据传输的实时性和可靠性,提高无人驾驶系统的性能。
03
自动驾驶汽车的硬件设计
Hardware Design of autonomous vehicle
激光雷达技术原理 激光雷达通过发射激光束并接收反射回来的信号,实现对周围环境的高精度三维建模。 摄像头技术原理 摄像头通过捕捉连续图像,利用图像处理算法提取特征点,实现对周围环境的实时感知。 传感器布局的重要性 合理布置传感器,可以提高无人驾驶系统对周围环境的感知能力,降低误判率,提高行驶安全性。 传感器布局的挑战与趋势 随着自动驾驶技术的发展,传感器布局面临更多挑战,如如何实现多传感器融合、提高感知精度等。未来发 展趋势将朝着更智能化、集成化的方向发展。
智能车ppt

方案设计
传感器设计方案: 安装摄像头时,要考虑的因素很多,主要有以下几 点: 1. 确保摄像头位置的居中,因为当摄像头不居中时, 其采集进来的图像也不是居中的,而处理程序对舵机 输出量是居中的,这样就会导致模型车在直道上也会 存在左右摆动的问题。 2. 摄像头的高度要足够高,这样可以使得模型车在摄 像头的角度不是很高的情况下就能够前瞻到前方足够 远处的路况信息,因为当摄像头的角度过大时候,
名 次
1 2 3
学校名称
湖南大学
比赛成 绩
30.299
北京科技大 30.311 学 山东大学 30.405
摄像头组决赛成绩
名次 1 2 3 4 5 6 7 8 学校名称 湖南大学 北京科技大学 山东大学 杭州电子科技大 学信息工程学院 西北工业大学 队伍名称 睿思队 北京科技大学摄 像头一队 白杨队 杭电信工5队 翱翔队 钱江5号 Drift 雏鹰队 比赛成绩 30.299 30.311 30.405 30.818 30.894 31.692 31.694 31.99
杭州电子科技大 学 华东理工大学
河海大学常州校 区
摄像头
在调查资料后,发现摄像头组的智能车在处理采集的 信号后再转换为单片机所需的信号所用的时间需要 20ms,而电磁和光电组的处理信号在10~20us之间, 我们组觉得这个可以是个突破点。 由于制作摄像头组的智能车需要有关于图像处理方面 的知识,而我们组的组员都是通信工程专业的学生, 今后发展可能会和图像处理,视频方面是工作挂钩。 去年我们学校代表队在摄像头组方面取的成绩相比于 其他组较好,所以我们能利用到更好的前辈资源。 我们发现摄像头组在采集信号,处理信号比其他组的 较为麻烦,所以觉得这是突破点。
智能小车电机驱动原理

第一节智能小车电机驱动原理一、驱动板概述驱动板由大功率驱动芯片L298为主,加上L1117稳压芯片为整个电路板提供稳定的5V电压;驱动板能同时驱动两个直流电机;通过对六个口的控制就可以分别实现对电机正反转、加减速的控制;完成向前、向后、左转和右转等各种组合运动;每个电机用三个口控制,一个使能端EN或PWM输入端,控制电机的转动与停止,也能用于PWM控制调速;也就说,对这个输入端输入一定频率的脉冲,当为高电平时,电机转动,为低电平时,电机停止转动;一定频率的脉冲,电机一段时间内转动一段时间内停止转动,但由于直流电机的惯性特性,它不会立即停下来,只要频率高于某个值,就不会感觉到电机的停滞现象,反而是一种很连续的运动;只要改变一个周期内高低电平的时间比例,就可以改变电机的速度;另外两个输入端是为了控制方向,分别为In1和In2;In1为高电平,In2为低电平,电机按一个方向转,In1为低电平,In2为高电平,电机向相反方向转,如果他们同时为高电平或低电平,那么电机不转;二、驱动板电路原理那我们首先分析一下L298驱动板,L298驱动板原理图如图1;该驱动板需要用7.2V电源供电,但L298N的逻辑参考电平为典型的TTL电平;用了一个L1117稳压芯片提供稳定的5V输出电压和逻辑参考电压,D9、D10、D11和D12是发光二极管,指示运动方向,与它们连接的电阻都是限流电阻;R5和R8都是下拉电阻,让EnA和EnB口要么是高电平,要么是低电平,避免出现电平混乱,提高对输入信号的抗干扰能力;输出端都接有0.1uF电容,加上二极管平衡电路;他们都是为了保护L298N,电机是感性负载,当给电机突然通电与断电,因为电流的瞬变,电机两端会产生瞬时高压和大电流;如果没有保护措施,L298N就可能会被烧毁;三、恒压恒流桥式2A驱动芯片L298NL298N驱动芯片是由SGS公司的产品,比较常见的15脚Multiwatt封装,内部有4通道逻辑驱动电路;它的内部结构如图1;从内部结构图可知,用三极管组成H型平衡桥,驱动功率大,驱动能力强;同时H型PWM电路工作在晶体管的饱和状态与截止状态,具有非常高的效率;从图2看出该驱动芯片有两路H型PWM电路,上面已谈到用PWM控制直流电机调速的基本原理,现在来看电路的具体实现;In1为高电平,In2为低电平,EnA为高电平时,U1、U4输出为高电平,U2、U3输出为低电平;在OUT1、OUT2接上电机后,T1、T4管导通,T2、T3管截止,电机向一个方向转;In1为低电平,In2为高电平,EnA仍旧为高电平,T1、T4管截止,T2、T3管导通,电机向相反方向转;In1、In2同时为高电平或低电平,T1与T3同时导通或截止,T2与T4也是同时导通与截止,但与前者相反,也就是OUT1与OUT2电压相同;电机会快速停转;如果EnA端为低电平,整个H型PWM电路关闭;电机当然也就不会转;四、驱动板连线:驱动板与单片机和驱动板与直流电机的接线如图3,整个系统的总电源由L298驱动板的供电电源提供;L298驱动板的5V电源输出给单片机;L298驱动板的输入控制端与P0口相连,具体各管脚的连接的情况如图3;L298驱动板的输出直接与直流电机连接,参照图3;L298驱动板的有一个VCC和GND不用;他们是使用步进电机时,作为公共端的;要实现对电机的前后控制,只要P0^0和P0^1逻辑电平相反;假设P0^0为高,P0^1为低时是正转;那么在颠倒送数,即P0^0为低,P0^1为高,车轮就会反转;调速,控制P0^2口的高电平保持时间相对总周期长点,速度就大,短点,速度就小;图3驱动板连线图。
智能小车硬件介绍PPT课件
图像传感器
② 暗电流噪声 暗电流噪声可以分为两部分:其一是耗尽层热激发产
生的,可用泊松分布描述;其二是复合产生中心非均匀 分布,特别是在某些单元位置上形成暗电流尖峰。由于 器件工作时各个信号电荷包的积分地点不同,读出路径 也不同,这些尖峰对各个电荷包贡献的电荷量不等,于 是形成很大的背景起伏,这就是常称的固定图像噪声的 起因。 ③ 转移噪声
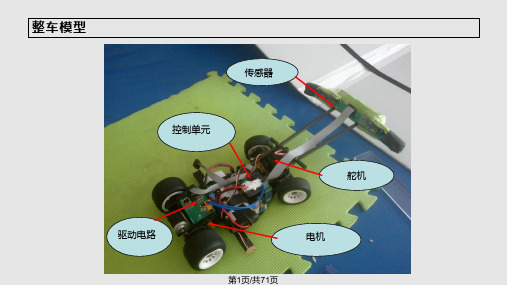
整车模型
传感器
控制单元
舵机
驱动电路
电机
第1页/共71页
第2页/共71页
智能汽车设计基础—硬件
从外观上看,智能车系统主要表现为由一系列的硬件组成,包括组成车体 的底盘、轮胎、舵机装置、马达装置、道路检测装置、测速装置和控制电路板等。 本章主要介绍智能车设计中使用到的传感器(包括光电式传感器、图像传感器和 测速传感器等)和控制电路板中的功能电路设计。
第16页/共71页
图像传感器
(2)面阵CCD图像传感器 面阵CCD图像传感器的感光单元呈二维矩阵排
列,能检测二维平面图像。由于传输与读出方式不 同,面阵图像传感器有许多类型,常见的传输方式 有行传输、帧传输和行间传输三种。
2.CCD图像传感器的特性参数 CCD图像器件的性能参数包括灵敏度、分辨率
、信噪比、光谱响应、动态范围和暗电流等,CCD
第31页/共71页
图像传感器
表2.1 常见的1/3 OmniVision CMOS摄像头的时序 参数
第32页/共71页
磁场检测传感器
根据麦克斯韦电磁场理论,交变电流会在周围产生 交变的电磁场。智能汽车竞赛使用路径导航的交流电流 频率为20kHz,产生的电磁波属于甚低频(VLF)电磁 波。甚低频频率范围处于工频和低频电磁破中间,为 3kHz~30kHz,波长为100km~10km。如下图所示 :
51单片机智能小车PWM调速前进程序源代码、电路原理图和器件表
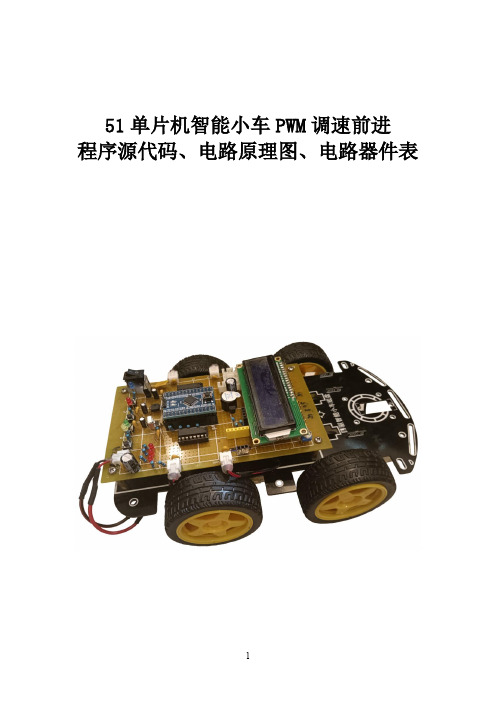
51单片机智能小车PWM调速前进程序源代码、电路原理图、电路器件表从控制电路角度划分,智能小车电路板分为核心板和驱动板。
核心板上的处理器的芯片型号是:STC15W4K56S4,这是一款51单片机。
驱动板上有电源电路、电机驱动电路以及一些功能模块接口。
智能小车前进只要控制智能小车四个轮子向前转动就可以了。
智能小车四个轮子由四个直流减速电机驱动。
直流减速电机驱动芯片采用L293D,一片电机驱动芯片L293D可以驱动两个直流减速电机,智能小车用到4个直流减速电机,需要用到两片L293D电机驱动芯片。
但有时候我们需要控制智能小车的速度,不希望智能小车全速前进。
比如在“智能小车循迹实验”中,如果智能小车速度过快,来不及反应做出方向的调整,智能小车会很容易跑离轨迹,这样就需要调整控制智能小车的速度了。
那么怎么样实现智能小车前进速度的调节呢?调节智能小车的速度,实际上是调节电机的运转速度,PWM调速是目前电机的主流调速方式。
智能小车采用脉宽调制(PWM)的办法来控制电机的转速,从而控制智能小车的速度。
在此种情况下,电池电源并非连续地向直流电机供电,而是在一个特定的频率下为直流电机提供电能。
不同占空比的方波信号,调节对直流电机的通断电,能起到对直流电机调速作用。
这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上。
这样,改变L293D使能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了直流电机转速。
智能小车PWM调速前进程序如下:首先,定义了2个变量,这2个变量用于设置智能小车的速度。
unsigned char pwmval_left_init=6; //调节此值可以调节小车的速度。
unsigned char pwmval_right_init=6; //调节此值可以调节小车的速度。
通过以下函数初始化定时器0,每1毫秒中断一次。
void Timer0_Init(void) //定时器0初始化{TMOD=0x01;TH0=0xf8;TL0=0xcd;TR0=1;ET0=1;EA=1;}下面我们看定时器0的中断处理函数。
智能小车_黑白线识别_寻光_寻迹_电机驱动原理分析__3路寻迹算法分析_含原理图和程序
V2
寻光电路测试方 测试光 法
敏电阻 阻值
V2
一、有光照情况 光敏电阻 R1 变小 V2 变大 假设 V2=4.6V V3 电压 4V V2>V3 反向端大于同向端 参考模电课程 运放作为比较 器部分 则 OUT5 输出低电平为低 0 给单片机识别,单片机通过 if 来扫描 out5 给的引脚
测 2点 电压
单片机通过电机驱动电路控制小车运行方法 P1.3 P1.2 P1.1 P1.0 0 前方 1 1 0 1 1 0 1 0 1 1 前进 0 后退 1 左转弯 1 右转弯 0 1 1 P0.2 P0.1 P0.0 1 0 1
LA LB
RA RB
1 0 右 轮
左 轮
左 减 速 电 机
右 电机 减 驱动 速 电路 电 机 单片机
注 : 检测到黑 特殊情况 1 线输出低电平 P0.0 P0.1 P0.2
单片机通过电机驱动电路控制小车运行方法 P1.3 P1.2 P1.1 P1.0 0 1 0 1 1 0 1 0 1 1 前进 0 后退 1 左转弯 1 右转弯 0 0 1 P0.2 P0.1 P0.0
前方 1
LA LB RA RB
前方 1
LA LB RA RB
1 0 右 轮 1
左 轮
左 减 速 电 机
右 电机 减 驱动 速 电路 电 机 单片机
P13 P12
P13 P12
万向滑轮
程序设计 ( 如果三个探测头全部 测到黑线,则小车到达终点, 停车 ) if(P0==0x04) { P1=0X07 }
红外 传感器探测 头
P0 P0 P0 2 1 0 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1
寻迹电路分析
智能车工作原理
智能车工作原理
智能车是一种配备了各种传感器和计算设备的车辆,能够通过感知周围环境并根据环境变化做出相应决策的交通工具。
它的工作原理可以大致分为三个主要部分:感知、决策和执行。
感知:智能车通过各种传感器,如摄像头、激光雷达、超声波传感器等实时监测周围环境。
摄像头可以获取道路图像,激光雷达可以检测周围障碍物的距离和位置,而超声波传感器可以检测车辆周围的物体和障碍物。
通过对这些传感器的数据进行分析处理,智能车能够获取精确的环境信息。
决策:在感知到周围环境后,智能车的计算系统会利用机器学习和人工智能算法来分析和理解这些环境信息。
通过对道路、车辆和行人等元素的识别和跟踪,智能车能够判断当前的交通情况,并根据自身的目标选择最优的行驶策略。
例如,在遇到红灯时,智能车将停下来等待绿灯。
执行:一旦决策出行驶策略后,智能车将通过自动控制系统操控车辆执行相应的动作。
自动控制系统包括了发动机控制、刹车控制、转向控制等。
这些控制器能够实时根据决策系统的指令调整车辆的速度、方向和加减速等参数,确保车辆按照预定策略行驶。
通过不断地感知、决策和执行,智能车能够自主地行驶在道路上,遵守交通规则和与其他车辆、行人等交通参与者进行安全的交互。
智能车的工作原理的核心是利用先进的传感器和智能
计算系统,将感知到的环境信息转化为实际行动,为出行提供更加智能和高效的解决方案。