SmartARM2200
arm 嵌入式系统基础教程 - 广州周立功单片机发展有限公司

ARM嵌入式系统基础教程周立功等编著北京航空航天大学出版社2005年1月定价:32.00元内容简介本书是《ARM嵌入式系统系列教程》中的理论课教材。
以PHILIPS公司LPC2000系列ARM微控制器为例,深入浅出地介绍嵌入式系统开发的各个方面。
全书共分为3部分:第1章和第2章为理论部分,主要介绍嵌入式系统的概念及开发方法。
第3~5章为基础部分,主要介绍ARM7体系结构、指令系统及LPC2000系列ARM微控制器的结构原理。
第6~8章为应用部分,主要以LPC2000系列微控制器为例介绍如何设计嵌入式系统,包括硬件的设计、μC/OSII的移植以及建立软件开发平台的方法。
本书可以作为高等院校电子、自动化、机电一体化计算机等相关专业嵌入式系统课程的教材,也可作为从事嵌入式系统应用开发工程师的参考资料。
本书配套多媒体教学课件。
序1. ARM嵌入式系统的发展趋势由于网络与通信技术的发展,嵌入式系统在经历了近20年的发展历程后,又进入了一个新的历史发展阶段,即从普遍的低端应用进入到一个高、低端并行发展,并且不断提升低端应用技术水平的时代,其标志是近年来32位MCU的发展。
32位MCU的应用不会走8位机百花齐放、百余种型号系列齐上阵的道路,这是因为在8位机的低端应用中,嵌入对象与对象专业领域十分广泛而复杂;而当前32位MCU的高端应用则多集中在网络、通信和多媒体技术领域,32位MCU将会集中在少数厂家发展的少数型号系列上。
在嵌入式系统高端应用的发展中,曾经有众多的厂家参与,很早就有许多8位嵌入式MCU厂家实施了8位、16位和32位机的发展计划。
后来,8位和32位机的技术扩展侵占了16位机的发展空间。
传统电子系统智能化对8位机的需求使这些厂家将主要精力放在8位机的发展上,形成了32位机发展迟迟不前的局面。
当网络、通信和多媒体信息家电业兴起后,出现了嵌入式系统高端应用的市场;而在嵌入式系统的高端应用中,进行多年技术准备的ARM公司适时地推出了32位ARM系列嵌入式微处理器,以其明显的性能优势和知识产权平台扇出的运行方式,迅速形成32位机高端应用的主流地位,以至于使不少传统嵌入式系统厂家放弃了自己的32位发展计划,转而使用ARM内核来发展自己的32位MCU。
建立交叉编译步骤周立功smart2200

建立交叉编译步骤周立功smart2200**建立交叉开发环境**由于目标板平台处理器是ARM,因而需要安装GCC针对ARM的编译器。
适用于μCLinux的编译器为arm-elf-gcc。
安装arm-elf-gcc步骤:(1)将光盘附带的文件arm-elf-tools-20040427.sh拷贝到目录如/usr/src 下,为arm-elf-tools-20040427.sh增加可执行权限(如果已经具有可执行权限,这步可省略)。
注意:增加权限必须具有root权限,若没有root权限,请先为用户增加root权限(命令su)。
#chmod 755 arm-elf-20040427.sh(2)安装arm-elf-gcc。
执行arm-elf-tools-20040427.sh。
./arm-elf-tools-20040427.sh安装完毕后,查看/usr/local/bin目录下是否存在arm-elf-gcc等文件,如果存在,基本可以确定交叉编译器安装成功。
(3)添加交叉编译器的路径。
一般情况下安装过程会自动执行,并在下次启动还有效。
export PATH=$PATH:/usr/local/arm-elf/bin**安装μCLinux**1:将光盘附带的μCLinux源码包uClinux-dist-20040408.tar.gz拷贝到目录如/usr/src下,并解压。
tar xzvf uClinux-dist-20040408.tar.gz解压后,在当前目录下会多出文件夹uClinux-dist,即μCLinux源代码目录。
2:为SmartARM2200开发板和LPC2200芯片打补丁。
将光盘附带的补丁文件uClinux-dist-20040408-lpc-chy-cmj.patch拷贝到当前目录下,并执行:cat uClinux-dist-20040408-lpc-chy-cmj.patch|patch– p1–duClinux-dist为LPC2200打补丁后,在μCLinux平台内核配置的时候将会有LPC2200的选项。
MiniGUI图形界面实验

学习移植 MiniGUI-STR(for uC/OS-II)软件到 SmartARM2200 开发板的基本方法,然后 编写一个简单的 MiniGUI 应用程序,使用 MessageBox 函数创建一个消息框,消息框中显示 字符串“Hello MiniGUI!” 。 4. 实验预习要求 (1) 仔细阅读<<ARM 嵌入式系统实验教程(二)>>第 1 章的内容,了解 SmartARM2200 开发板的硬件结构,注意 TFT 液晶接口电路和键盘电路。 (2) 阅读 MiniGUI 的文档 <<MiniGUI 用户手册 >> 和 <<MiniGUI 编程指南 >> ,了解 MiniGUI 的基本特点和应用配置选项,以及应用程序的编写。 5. 实验原理 (1) MiniGUI 简介 MiniGUI 项目的最初目标是为基于 Linux 的实时嵌入式操作系统提供一个轻量级的图形 用户界面支持系统,发展到今天,MiniGUI 已进入成熟和稳定阶段,并且所支持的操作系统 已不仅仅限于 Linux,它还可以在 uClinux、uC/OS-II、eCos、VxWorks 等系统上运行。 MiniGUI 为应用程序定义了一组轻量级的窗口和图形设备接口, 利用这些接口, 每个应 用程序可以建立多个主窗口,然后在这些主窗口中创建按钮、编辑框等控制。MiniGUI 还为 用户提供了丰富的图形功能,以显示各种格式的位图并在窗口中绘制复杂图形。 MiniGUI 和嵌入式操作系统的关系如图 1.1 所示,基于 MiniGUI 的应用程序一般通过 ANSI C 库以及 MiniGUI 自身提供的 API 来实现自己的功能。
4
广州周立功单片机发展有限公司 }
Tel: (020)38730976
SMARTARM2200调试初体验

SMARTARM2200调试初体验去年8月购买了ZLG的Smart2000,由于工作的缘由,向来没能抽空学习,到了春节前后最终可以抽空学习ARM了。
我在互动出版社购买了一批书籍,希翼能ARM迅速入门并尽快提高。
开头举行ARM理论学习,我是参考ZLG的《ARM系统基础教程》,同时我又温习了下C51的学问,希翼在ARM中学习中能把C51也灵便把握。
接着就是用SmartARM2000开发板做试验,需要安装ARM开发环境,详细步骤可参见本人的《ARM学习进阶(1)-ARM开发环境的配置》。
按配套试验教程《ARM嵌入式系统试验教程(二)》的要求完成了其次章的基础试验,因为是挺直运行配套光盘的DEMO源程序,每个试验都是针对某个功能部件,所以都比较顺当。
后来试着自己编了几个程序来同时实现几个不同部件功能,结果也还惬意。
为了在SmartARM2000上做基于UC/OS-II的试验,还需要UC/OS-II 2.52的源代码。
我找出2002年买的《嵌入式实时操作系统UC/OS-II(邵贝贝译)》配套光盘,里面正巧有UC/OS-II 2.52的源代码,这样开发环境也具备了。
按试验教程运行DEMO源程序,运行正常。
自己也试着编写OS系统,运行基本达到预期。
用SmartARM2000开发板我举行了配套教程第2~4章的试验内容,也按自己的设想完成了多个试验,对ARM的性能有了长进的了解。
但是试验中也碰到些莫名的问题至此仍然不解,ZLG的技术支持也没能给出惬意的答复,希翼能解惑的大侠能抽空赋予解答:(1)JP1-ISP、JP9-OUTSIDE/INSIDE、JP10-BANK0/1设置都正确的状况下,以前在外部RAM调试方式下能正常运行的程序骤然不能运行了,可这程序在外部FLASH调试方式下正常运行,用LPC2294举行内部FLASH脱机运行也正常;然后某天再用SmartARM2000开发板调试时,即使在外部RAM调试方式下也能正常运行了。
MagicARM2200出厂演示程序编程

第1章 MagicARM2200出厂演示程序的烧写整个过程分三步进行,需首先进行触摸屏校准,然后下载引导代码show.hex,最后再下载用于演示的应用程序,制作演示启动盘。
1.1 触摸屏校准触摸屏校准参数存储于CAT1025(串行E2PROM,在核心板上)中,如果在实验中改写过其中的数据,触摸屏的触点和实际选中的点很可能存在误差。
为了消除这种误差,保证触摸屏的准确性,需要先进行触摸屏校准。
将产品配套光盘\ARM嵌入式系统实验教程(三)\出厂演示程序\触摸屏校准程序目录下的触摸屏校准程序(ChkTouch目录)复制到硬盘上,去掉所有文件的“只读”属性,然后使用ADS1.2集成开发环境打开ChkTouch工程。
短接MagicARM2200上的蜂鸣器跳线JP22、LCD触摸屏跳线JP5和LCD背光电源跳线JP3,将EasyJTAG和MagicARM2200相连,在ADS1.2集成开发环境中选择DebugInExtRam,编译后进入AXD调试状态,全速运行程序。
在LCD左上角将会出现一个小“+”,用触摸笔点击“+”交叉点(尽可能准确,保证校准效果),蜂鸣器鸣叫;在右下角将会出现同样的“+”,进行同样的操作,操作完毕在LCD左上角将会出现一个箭头形光标,用触摸笔点击LCD,看光标的箭头和触点是否重合或者非常接近,如果非常接近,即可以认为校准完毕,可点击LCD上的“保存”按钮,将校准参数保存到CAT1025中,如果触点和箭头相差较远,则请点击LCD上的“重新校准”,再次进行校准,直到接近为止。
校准完毕后复位MagicARM2200即可。
1.2 下载show.hex可以通过串口和以太网下载show.hex。
串口下载较慢,以太网下载较快,请根据自身情况选择。
1.2.1 串口下载将MagicARM2200的JP30短接,JP28断开。
使用串口延长线连接CZ4到PC机串口,启动WINDOWS操作系统自带的超级终端,并设置为8位数据位,1位停止位,无奇偶校验位,波特率为38400,设置流量控制为“无”,如图1.1所示。
H-JTAG基本使用

广州周立功单片机发展有限公司Tel: (020)3873097638730977Fax: 38730925第1章 H-JTAG 基本使用方法1.1 软件安装在 PC 上运行安装文件 H-JTAG.EXE,如图 1.1 所示。
根据安装提示完成安装即可。
图 1.1 H-JTAG 软件安装界面安装好的 H-JTAG 软件包含有 H-JTAG Server(下文简称为 H-JTAG)和 H-Flasher,在 桌面上有它们的快捷图标。
运行程序 H-JTAG 和 H-Flasher 后,用户任务栏中将出现图 1.2 所示图标。
图 1.2 H-JTAG 提示图标将计算机并口与 EasyJTAG-H 仿真器相连, 再将 EasyJTAG-H 仿真器的 JTAG 接口相连, 然后给开发板上电。
1.1.1 H-JTAG 配置 在使用 H-JTAG Server 调试 ARM7 前,需要进行以下几步设置。
1、单击任务栏的 H 提示图标,打开 H-JTAG 窗口,如图 1.3 所示。
单击“放大镜”图 标按钮后,能看见调试代理搜索到 ARM7 处理器。
1广州周立功单片机发展有限公司Tel: (020)3873097638730977Fax: 38730925图 1.3 H-JTAG 主窗口2、选择【Flasher】->【Auto Download】选择自动下载项,如图 1.4 所示。
注:在 Flash 中调试时必须选择“Auto Download” ,而在 RAM 中调试可以不选择。
图 1.4 打开自动下载功能3、 设置 JTAG 复位信号: “Settings” 选择 菜单栏中的 “LPT Jtag Setting” 在弹出的 , “LPC JTAG Setting”窗口中按照图 1.5 所示进行设置。
2广州周立功单片机发展有限公司Tel: (020)3873097638730977Fax: 38730925图 1.5 LPC JTAG Setting1.1.2 H-Flasher 配置 对 H-Flasher 的配置根据调试目标的不同分为两种情况:在片内存储器中调试时需用户 手动配置;在片外存储器中调试时需加载配置文件。
读写SDMMC卡_SmartARM2200_
ZLG/FS读写SD/MMC卡(SmartARM2200) 1.实验目的学会使用ZLG/SD软件包访问SD/MMC卡。
学会综合使用ZLG/FS软件包和ZLG/SD软件包以文件形式访问SD/MMC卡。
2.实验设备硬件:SmartARM2200开发板一套SD或MMC卡一张SD/MMC卡读卡器一个软件:Windows98/XP/2000操作系统,ADS 1.2集成开发环境µC/OS-II操作系统(V2.52)ZLG/SD软件包,ZLG/FS软件包3.实验内容综合利用ZLG/SD软件包与ZLG/FS软件包,ZLG/FS文件系统软件包通过ZLG/SD软件包以文件的形式来访问SD/MMC卡。
在SD/MMC卡上创建一个目录“ARM&FATS”和一个文本文件“单片机.txt”,并往该文件中添加内容。
4.实验预习要求仔细阅读《ARM嵌入式系统实验教程(二)》第1章的内容,了解SmartARM2200开发板的硬件结构。
仔细阅读《ARM嵌入式系统实验教程(二)》的内容,了解ADS 1.2集成开发环境、LPC2200专用工程模板、EasyJTAG仿真器的应用。
仔细阅读《ZLG_SD使用手册》(见产品光盘目录:ARM嵌入式系统实验教程(二)\第4章_基于uCOS-II的综合实验\4.4_SDMMC卡读卡器实验),理解ZLG/SD软件包的使用方法。
5.实验原理ZLG/FS是一个可移植到不同CPU上运行的文件系统管理软件包(支持FAT12、FAT16、FAT32文件系统),通过移植该软件包的读/写存储器接口函数,可以以文件的形式读/写如CF卡、SD/MMC卡、Flash芯片等存储介质。
本实验将示例用ZLG/FS文件系统读/写SD/MMC卡。
ZLG/FS读写SD/MMC卡必须移植一个函数,在本实验中,该函数为:uint16 SDCammand(uint8 Cammand, void *Parameter)下面的实验步骤将会提到该函数所在的文件。
Adaptec SmartHBA 2200 Series:16i Tri-Mode SAS SATA

Adaptec® SmartHBA 2200 Series: 16iTri-Mode SAS/SATA/NVMe™ Host Bus Adapter with Basic Hardware RAID Host: x8/x16 PCIe® Gen 4Media: 24G SAS, 6G SATA, PCIe Gen 4 NVMeEntry-Level RAID FunctionalityThe SmartHBA 2200 combines uncompromised HBAfunctionality with basic cacheless RAID support inhardware using the SmartIOC 2200 silicon. Robust RAIDsupport is the same for all platforms and operatingsystems, providing a consistent user experience. Meta-data compatibility with SmartRAID 3200 products allowscustomers to upgrade to a full-feature hardware RAIDsolution with caching for acceleration if needed. TheSmartHBA 2200 supports up to 16 direct-attached harddisk drives or SSDs in RAID configurations using RAIDlevels 0, 1, 10 or even RAID 5, and can simultaneously useRAID arrays and raw devices in mixed mode.Seamless Media Support with Tri-Mode ConnectivityThe SmartHBA 2200 supports both Intel® Virtual Pin Port(VPP) for intelligent backplane management and SFF'sUniversal Backplane Management (UBM) standards tosimplify integration and enhance product flexibility forsystem integrators. UBM support enables auto-detectionof the media type and interface bifurcation. SGPIO andSCSI Enclo s ure Services (SES) allow a common way tomanage device status and activity for directly connectedstorage devices or for devices connected behind a SASexpander.The Smart Storage platform supports industry leadingstorage management including standards-based PlatformLevel Data Model (PLDM)/Redfish® Device Enablement(RDE) to simplify integration and Microchip's ChipLinkDiagnostic Tool with signal integrity analysis and contextsensitive documentation to accelerate time to market.The Adaptec SmartHBA 2200 adapter support a widerange of software solutions including Microsoft® StorageSpaces Direct, VMWare vSAN and OpenStack Swift/Ceph.The Microchip name and logo and the Microchip logo are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries. All other trademarks mentioned herein are property of their respective companies. © 2023, Microchip Technology Incorporated and its subsidiaries. All Rights Reserved. 6/23 DS00003269DBenefits• Ideal for enabling PCIe Gen 4 storage capabilities for hyperscale applications, enterprise, and SMB, with proven reliability• Tri-mode support for SAS/SATA/NVMe devices• Combines full-featured, high-performance HBA functional-ity with basic hardware RAID• Built-in PCIe switch to enable ultra-low latency access to NVMe storage devices•Superior performance enabling up to 13 GB/s throughput and 3.5M+ IOPs 4K RRHighlights• Low profile, M D2 form factor• Fully tri-mode capable: 16 Gbps NVMe Gen 4, 24 Gbps SAS-4 and 6 Gbps SATA• 8-lane (x8) PCIe Gen 4 host interface• Internal SlimSAS connector (using SFF-9402 pinout to support U.2 and U.3)• Universal backplane management (UBM) • Virtual Pin Port Management (VPP)• SES (SAS expander-based backplanes), SGPIO (direct attached SAS/SATA backplanes)• Secure boot, secure update and attestation • Dynamic adapter power management • arcconf/maxView support• Support for 64 NVMe devices and up to 256 SAS/SATA devices • Broad inbox OS coverage• Comprehensive out-of-box driver support • Multi-initiator support •Support for x86 platform。
J-LINK安装说明
关于J-LINK在ADS1.2中使用的方法说明经测试J-LINK ARM在笔记本电脑中的ADS1.2环境下可以使用。
系统:win7,XP软件:ADS1.2J-LINK驱动版本:win7下使用Setup_JLinkARM_V410i;XP下使用Setup_JLinkARM_V408l。
初始化方式如下:1、安装J-LINK驱动,安装完成后将J-LINK驱动安装目录下的JLinkARM.DLL文件复制到ADS1.2软件根目录下的bin文件夹中。
2、打开AXD debugger软件,选择菜单options->configure target,在对话框中单击ADD,选择J-LINK驱动根目录下JLinkRDI.dll文件。
3、初始化:(1).如何做初始化?步骤: 进入ADS,选System Views,在下拉菜单中选Command Line Interface,在程序显示窗口下会出现Command Line Interface界面,在Debug >后输入"obey 初始化文件存放路径(最好不要含中文路径)",如:Debug >obeyE:\Smartarm2200\LPC2200.txt,然后回车即可注意:初始化要在编译之前做好,并且要清除options-->Configure Processor中的所有选项,主要是在Vector catch项选Clear All,去掉Semihosting前的对号,因为这两项会影响硬件断点的设置.(2).如何保存初始化?步骤:接上步做完初始化后,点options-->Congfigure Interface..-->在弹出的对话框中选Session File菜单-->选中Reload Images和Run Configuration Script,并点Browse 将路径指到初始化文件存放的目录.Flie-->Save Session将所做的初始化保存,扩展名为.ses 下次打开ADS时会自动加载上次保存的初始化,要加载别的初始化,点Flie-->Load Session,指到所要加载的初始化存放目录即可.这样将初始化保存后,每次只要加载保存的.ses文件即可,避免了每次都要敲入命令的麻烦.完成上述步骤即可使用。
【微计算机信息】_uclinux_期刊发文热词逐年推荐_20140722

2010年 科研热词 推荐指数 uclinux 3 嵌入式系统 2 网关 1 移植 1 流媒体服务器 1 根文件系统 1 心跳包 1 嵌入式linux 1 代理服务 1 udp 1 uclinux操作系统 1 tcp 1 nfs 1 mpeg4编码 1 jupiter 1 cramfs 1 busybox 1 arm7 1 arm 1
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
科研热词 推荐指数 uclinux 12 驱动程序 3 嵌入式系统 3 监控系统 2 嵌入式路由器 2 家庭网关 2 s3c4510b 2 netlink套接字 2 hdlc驱动 2 键盘 1 速度识别 1 远程控制 1 调制式红外光 1 触摸屏控制器 1 自动挂号机 1 网络视频 1 网络安全终端 1 缓冲区同步 1 纸币识别系统 1 短消息 1 现场可编程门阵列 1 片上可编程系统 1 汽车安防 1 数据采集 1 循环缓冲区存储 1 开发平台 1 嵌入式数据库 1 嵌入式操作系统 1 嵌入式 1 多媒体信息服务 1 双网数字传真机 1 协议 1 中断 1 ⅱ 1 web视频服务器 1 usb主机 1 tcp/ip 1 sqlite 1 spartan 3e 1 sopc 1 smartarm2200开发板 1 s3c44box 1 rtl8019as 1 rtai 1 rfid 1 niosⅱ 1 nios 1 mysqlite 1 mdb/icp协议 1 lpc2294 1 linux系统 1 jpeg摄像头 1
EasyARM2200

概述EasyARM2200是专业支持NXP半导体公司(原PHILIPS)推出的LPC2100/2200系列等15种32位ARM微控制器,且集学习、实验与开发于一体的“三合一”初学者快速入门与提高版套件。
选用基于ARM7TDMI-S 核、LQFP144封装的LPC2220作为主CPU,随机免费配套提供了支持ADS集成开发环境的EasyJTAG-H仿真器及其几乎所有基于的ARM7/ARM9/Xscale/Cortex-M3内核ARM微处理器的仿真与开发并具备ISP下载编程功能。
通过电话、BBS、E-mail等多种方式为初学者提供免费的技术支持,遍布全国各地分公司的销售工程师为您开发产品提供免费上门服务,针对特定的产品领域提供完整的解决方案以及不定期在全国各地以多种形式主办免费的ARM技术培训,参考资料十分丰富,售价低廉。
秉承诚实有信的商业原则,我们通过不断地努力、发展与壮大建立了超过250人的销售、技术支持与开发团队,不断向用户推广新、优、廉的电子元器件、产品以及技术,通过帮助用户创造价值,依此来赢得用户、社会的支持和信任。
参考照片(选配件)ISP1160BM PACKEasyARM2103 PACK定位帮助初学者快速入门与提高,减少重复开发劳动,降低产品开发风险,缩短产品开发周期,快速占领市场,提升个人与企业的竞争力。
并非一味强调软件的作用偏离产品开发的本质,注重软硬件理论与实践相结合的特色,为大专院校培养嵌入式应用开发软硬件复合型人才定身度造,特别适合ARM嵌入式系统教学、实验、课程设计、毕业设计、研究生课题。
配套资源《ARM嵌入式系统基础教程》共计66.6万字、多达452符合读者购买心里价格要求,特点:配合1200页独创的多媒体教学课件学习以及周立功公司在全国各地主办的免费培训班,浅显易懂、图文并茂、理论与实践相结合效果非常明显。
《ARRM嵌入式系统实验教程(一)》共计43.7万字,多达393页,特点:以基础实验、基于uC/OS-II操作系统的实验以及综合实验为主体框架提供了多达48个实验例子,形成了从易到难的实验教学体系,多方位帮助用户印证理论,全面深入掌握嵌入式系统应用开发技术。
嵌入式系统设计实验报告
111 实验项目名称:基于ucOS 的多任务系统一、实验目的(1) 掌握LPC2200(for MagicARM2200)专用工程模板的使用;专用工程模板的使用;(2) 能够在MagicARM2200-S 上运行基于μC/OS μC/OS-II -II 操作系统的程序;操作系统的程序;(3) 掌握基于μC/OS μC/OS-II -II 操作系统的用户程序的编写格式。
操作系统的用户程序的编写格式。
二、实验内容及要求建立三个或三个以上的μC/OS μC/OS-II -II 的任务,一个任务用于检测KEY1 按键输入,称之为按键检测任务,另一个任务用于控制蜂鸣器,就称之为蜂鸣器控制任务。
还有LED 灯任务和电机任务。
要求各个任务之间不是独立的,而是有相互关联的,达到多任务间的数据通信和同步的实验要求。
的数据通信和同步的实验要求。
三、实验设备及软件硬件:PC 机 一台一台MagicARM2200-S 教学实验开发平台教学实验开发平台 一套一套软件:Windows98/XP/2000 系统,ADS 1.2 集成开发环境集成开发环境μC/OS μC/OS-II -II 操作系统(V2.52) 四、设计方案方案一: 建立四个任务:LED 灯、按键、电机、蜂鸣器灯、按键、电机、蜂鸣器LED 任务:LED 灯有不同的花样,由数组中的十六进制数据决定。
可通过设计数组的数据来设计出很多的花型。
组的数据来设计出很多的花型。
按键任务:按键任务主要是对按下的键在0到4内计数,再将所计的数通过邮箱发送给LED 、电机任务,来控制任务间的通信。
、电机任务,来控制任务间的通信。
电机任务:电机的转速会不断的改变,电机的转速也是靠按键任务里发送的广播邮箱的值确定的,有五种转速。
每次按下一次按键,转速就会改变一次。
蜂鸣器任务:蜂鸣器的响灭是由LED 任务里发送的信号量控制的,任务里发送的信号量控制的,当当LED 灯亮完一个周期后就发送一个信号让蜂鸣器响起来,一个周期后就发送一个信号让蜂鸣器响起来,响完后蜂鸣器自己删除信号量,响完后蜂鸣器自己删除信号量,响完后蜂鸣器自己删除信号量,等着等着LED 灯再一次并且发送信号。
LPC2000系列学习笔记
LPC2000系列学习笔记--目录1 LPC2000系列简介 (1)1.1 部分特性 (2)1.2 存储器映射 (3)2 时钟周期 (3)3 引脚连接模块 (6)4 存储器映射控制 (6)4.1 寄存器MEMMAP的取值 (7)4.2 BOOT管脚的功能 (7)4.3 举例:启动代码 (8)5 中断 (8)5.1 中断源 (8)5.2 三种中断类型 (10)5.3 如何初始化某个中断源为三类中断中的一类 (10)5.4 中断处理过程 (10)5.5 IRQ中断 (11)5.6 关于外部中断 (11)5.7 举例 (11)6 定时器 (12)6.1 基本定时功能 (13)7 UART. 138 PWM.. 139 A/D模块 (13)10 bootloader 1310.1 变(常)量声明 (13)10.2 建立中断向量表(向量表所有数据32位累加和为0) 1410.3 复位程序 (15)10.4 堆栈初始化 (16)10.5 目标板初始化 (17)10.6 其它18LPC2000系列学习笔记2--时钟周期对于LPC2000系列,如果从XTAL1脚输入占空比为50-50的时钟信号,则时钟频率在1~50MHz内;如果使用外部晶振,则仅支持1~30MHz的外部晶振;如果使用片内PLL系统或者引导程序(即ISP功能),输入时钟频率将被限制在10~25MHz。
以上是对于晶振输出频率(Fosc)的限制。
除了晶振输出频率,LPC2000还有如下几种频率:Fcco PLL电流控制震荡器的频率,不需太过关注Fcclk PLL输出频率,也称处理器的时钟频率Fpclk VPB时钟频率,即为处理器与外设通讯的频率它们之间的关系如下:(M 、P为PLLCFG寄存器中的倍增器值与分频器值)Fcclk = Fosc × (M+1) M=0,1,2,…,31;Fcclk不大于60MHzFcco = Fosc × 2 P P=1,2,3,4;Fcco处于156~320MHzFplck = Fcclk / (VPBDIV的值) VPBDIV取值1,2,4特别注意,PLL的操作顺序应该是:先将PLL激活并等待锁定,然后再将PLL连接。
华为AR2200路由器配置
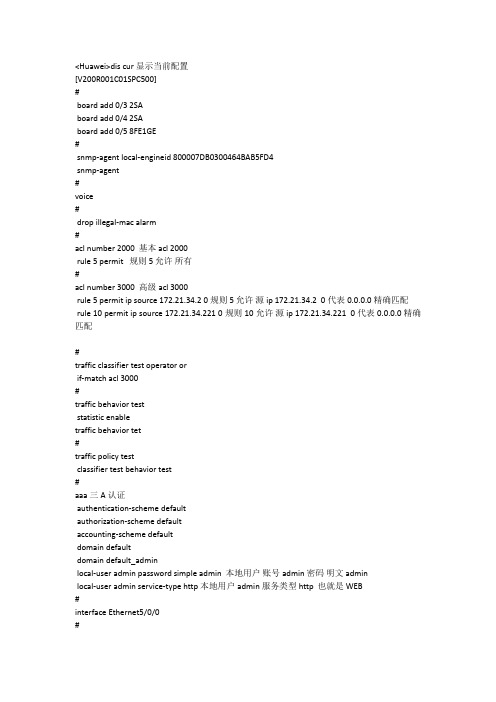
<Huawei>dis cur 显示当前配置[V200R001C01SPC500]#board add 0/3 2SAboard add 0/4 2SAboard add 0/5 8FE1GE#snmp-agent local-engineid 800007DB0300464BAB5FD4snmp-agent#voice#drop illegal-mac alarm#acl number 2000 基本 acl 2000rule 5 permit 规则 5 允许所有#acl number 3000 高级acl 3000rule 5 permit ip source 172.21.34.2 0 规则 5 允许源 ip 172.21.34.2 0代表0.0.0.0 精确匹配rule 10 permit ip source 172.21.34.221 0规则 10 允许源 ip 172.21.34.221 0代表0.0.0.0 精确匹配#traffic classifier test operator orif-match acl 3000#traffic behavior teststatistic enabletraffic behavior tet#traffic policy testclassifier test behavior test#aaa 三A认证authentication-scheme defaultauthorization-scheme defaultaccounting-scheme defaultdomain defaultdomain default_adminlocal-user admin password simple admin 本地用户账号admin 密码明文 adminlocal-user admin service-type http 本地用户admin 服务类型 http 也就是 WEB#interface Ethernet5/0/0#interface Ethernet5/0/1#interface Ethernet5/0/2#interface Ethernet5/0/3#interface Ethernet5/0/4#interface Ethernet5/0/5#interface Ethernet5/0/6#interface Ethernet5/0/7#interface Serial3/0/0link-protocol fr 封装帧中继协议fr lmi type q933a帧中继 lmi 类型 q933afr dlci 700 帧中继dlci 号 700description link-Beijing 描述链接北京ip address 172.31.1.6 255.255.255.252 ip地址 172.31.1.6 子网掩码255.255.255.252 #interface Serial3/0/1 串口link-protocol ppp 封装ppp 点对点协议#interface Serial4/0/0link-protocol ppp封装ppp 点对点协议#interface Serial4/0/1link-protocol ppp封装ppp 点对点协议#interface GigabitEthernet0/0/0traffic-policy test inbound#interface GigabitEthernet0/0/0.2description server_vlan 2 描述服务器 vlan 2control-vid 2 dot1q-terminationdot1q termination vid 2这个应该是子接口封装的802.1q协议对应vlan 2ip address 172.21.34.254 255.255.255.0arp broadcast enable 使能ARP广播#interface GigabitEthernet0/0/0.4description fanghuoqiang_vlan4control-vid 4 dot1q-terminationdot1q termination vid 4这个应该是子接口封装的802.1q协议对应vlan 4ip address 172.21.36.254 255.255.255.0arp broadcast enable使能ARP广播#interface GigabitEthernet0/0/0.10description guanli_vlan 10 描述管理 vlan 10control-vid 10 dot1q-terminationdot1q termination vid 10 这个应该是子接口封装的802.1q协议对应vlan 10 ip address 172.21.42.254 255.255.255.0arp broadcast enable使能ARP广播#interface GigabitEthernet0/0/1#interface GigabitEthernet0/0/2#interface GigabitEthernet5/0/0#interface Cellular0/0/0link-protocol ppp 封装ppp协议#interface Cellular0/0/1link-protocol ppp封装ppp协议#interface NULL0#ip route-static 0.0.0.0 0.0.0.0 172.31.1.5 静态默认路由这是一条#user-interface con 0user-interface vty 0 4user-interface vty 16 20#return<Huawei>460510895清水无香。
arm书籍

《深入浅出ARM7--LPC213x(上.下)》(周立功张华著北京航天航空大学出版社45.00元)这本是首先要推荐的,周立功写的经典系列教材之一(另一个是基础教程系列,下面介绍)。
上册前两章为基于EasyARM2131的编译环境介绍,后三章功能部件的详细介绍与使用。
下册是基于UCOS-Ⅱ操作系统的应用。
优点:每个章节都有配套实验和程序代码,非常适合初学者对ARM体系建立整体框架,简洁实用。
缺点:没有对汇编语言的讲解,在研究启动代码时有些不方便。
而且你的板子并不是2104,启动代码会与书中例子不同,需要自己修改。
(这一点可以参看基础教程弥补。
)《ARM嵌入式系统基础教程》(周立功著北京航天航空大学出版32.00元) 这是该系列教材中最基本,也是最重要的教材。
该系列中还有三本实验教程(分别基于EasyARM2200、SmartARM2200、MagicARM2200实验开发板)、两本软件开发实例和一本学习指导。
《基础教程》前两章为概论,2~4章为汇编指令介绍,5、6章为功能部件使用介绍,也配有例子,但没深入浅处详细。
最后两章是基于UCOS-Ⅱ操作系统的应用。
优点:体系比较完整,可选性强;有汇编语言的详细讲解,便于对启动代码深入研究;最重要的是这个教材的ppt课件做的非常棒,生动、形象,可以帮助对运行机理的理解。
多说一句,其实学习ARM是个很枯燥的过程,尤其是刚开始,坚持看下去很重要,看不懂的可以先跳过。
但不论你看懂多少,你看过一遍之后绝对会有很大收获的,这点很重要。
所以强烈建议配合课件使用。
缺点:正是因为全,所以显得很繁琐,让人无从下手,不利于快速理解ARM 的运行机理掌握使用方法。
并且章节后例子不多,不够实用。
所以只建议使用《基础教程》,不要再选用其他的配套教材,而用《深入浅出》代替。
此外,我在论坛里还听过另外一个意见,“由于周立功的书都是参照ARM公司与PHILIPS公司的使用手册编写(说是参照,基本就是原版翻译),所以里面的讲述方法都是西方人的思维逻辑,看着不顺畅。
SmartARM2200启动文件分析

SmartARM2200启动文件分析先看不同的工具链会提供一些不同的机制和方法帮助用户完成这一步操作,主要是跟链接器(Linker)相关。
下面是在ARM 开发工具环境ADS 下,一种常用存储器模型的直接实现:LDR r0, = |ImageROLimit| ;得到RO 段末的下一字节的地址,ROM 中的RW 的开始地址LDR r1, = |ImageRWBase| ;得到RAM 中的RW 段的初始地址LDR r3, = |ImageZIBase| ;全局变量的初始地址CMP r0, r1 ;BEQ LOOP1LOOP0 CMP r1, r3 ;是否到RAM 中的RW 段的末地址,如果没到,则一直将ROM(FLASH 变量与数据段拷贝到RAM 中LDRCC r2, [r0], #4;[R0]=[R1] STRCC r2, [r1], #4 ;BCC LOOP0LOOP1LDR r1, = |ImageZILimit| ; LOOP1 与LOOP2 执行将ZI 初始化为0MOV r2, #0LOOP2CMP r3, r1 STRCC r2, [r3], #4 ;BCC LOOP2 在ADS 里,有一些预先定义了的变量可以用(linker defined symbol)。
在下面的实现里,用到了几个预定义的变量:ImageROBase 该变量指定了RO 段的BASEImageROLimit 该变量指定了RO 段的LimitImageRWBase 该变量指定了RW 段的BASEImageRWLimit 该变量指定了RW 段的LimitImageZIBase 该变量指定了ZI 段的BASEImageZILimit 该变量指定了ZI 段的Limit 注:具体可以参考ADS Linker GuideImageROLimit 减ImageROBase 等于RO 段的大小ImageRWLimit 减ImageRWBase 等于RW 段的大小ImageZILimit 减ImageZIBase 等于ZI 段的大小(ImageROLimit 减ImageROBase)+ (ImageRWLimit 减ImageRWBase)=等于整个程序的大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章SmartARM2200教学实验开发平台1.1 总体特性定位:z高校嵌入式系统创新实验室首选平台;z面向产品开发的工程师;z面向在校研究生和有购买能力的个人。
SmartARM2200是广州致远电子有限公司精心设计的一款ARM嵌入式系统开发平台。
支持多种嵌入式操作系统,提供丰富的配套教材和众多的实验例程,提供多种的商业化软件包,并配备精心设计的多媒体教学课件,既适合于进行ARM7嵌入式系统开发的工程师,亦适合于高校嵌入式系统教学。
z支持多种CPU¾全面支持12种型号的144 PIN ARM7微控制器――LPC2100 (LPC2114/2124/2119/2129/2194)――LPC2200 (LPC2210/2220/2212/2214/2290/2292/2294)z附送仿真器¾完全自主设计的软硬件、拥有自主版权的JTAG仿真技术,支持ADS1.2集成开发环境及PHILIPS所有通用ARM微控制器的仿真和开发z支持多种可选嵌入式操作系统¾µC/OS-II嵌入式实时操作系统¾µCLinux操作系统z配套丰富的教材¾《ARM嵌入式系统基础教程》(标配)¾《ARM嵌入式系统实验教程(二)》(标配)¾《ARM嵌入式软件开发实例(一)》¾《ARM嵌入式软件开发实例(二)》¾《ARM嵌入式Linux系统构建与驱动开发范例》¾《ARM嵌入式MiniGUI初步与应用开发范例》z多媒体教学课件¾耗时半年之久,倾力制作¾大量动画突出重点和难点,层层剥笋由浅入深¾紧扣教材主线,任君裁剪z附带众多源码和软件包¾众多实验例程和源代码¾众多商业化软件包z免费捆绑MiniGUI学习版软件(单独销价129元)¾北京飞漫出品,周立功公司独家代理¾提供MiniGUI for µCLinux移植实验,MiniGUI应用实例¾免费提供MiniGUI-STR软件包1.2 参考图片z主板――4层PCB设计,超强抗干扰z板上资源¾2M字节NOR FLASH¾8M字节PSRAM¾16M字节NAND FLASH¾256字节E2PROMz众多扩展部件¾标准20针JTAG调试接口/ETM跟踪调试接口¾CF卡/IDE硬盘接口¾SD/MMC卡模块¾2路10位A/D¾LM75数字温度传感器¾ZLG7290键盘管理和显示控制¾MG240128单色点阵图形液晶接口¾GPIO引出,方便功能扩展¾各功能部件可以通过跳线灵活选择z多种通信接口¾双串口,串口1带Modem接口¾10M以太网接口¾2个USB HOST 2.0(全速)¾1个USB Device 2.0(全速)z多种人机交互界面¾1个2.2英寸240×320 262K色彩色液晶屏¾4个独立LED¾1个蜂鸣器¾1个独立按键¾4×4矩阵键盘z精美布局,人性化设计¾精心设计外壳,完美感观享受¾专业、进取完美结合1.3 丰富的配套模块z LPC2103 PACK板EasyARM2200实验开发平台的用户可以通过选配LPC2103 PACK板无缝升级到LPC2103开发平台。
如果您已经拥有一套EasyARM2200实验开发平台,LPC2103 PACK 板以及完备的配套资料将让您马上以最快捷的方式进入LPC2103的开发周期。
如果您正打算选用LPC2103开发产品,那么EasyARM2200实验开发平台配上LPC2103 PACK板将极大地缩减您的产品开发周期。
LPC2103 PACK板也可与 SmartARM2200配套使用。
¾支持LPC2103/2102/2101。
¾源码方式提供各功能部件软件包,加速您的产品开发。
¾提供丰富的实验例程,配套《LPC2103实验教程》。
¾提供基于Keil以及ADS环境下的工程模板。
z ISP1161BM PACK (标配)¾符合通用串行总线2.0规范¾支持全速(12Mbit/s)及低速(1.5Mbit/s)两种数据模式¾两个下行端口,可同时操作两个USB设备¾16位总线接口,微控制器与HC之间数据传输率最大为15M字节/S¾兼容大多数通用微处理器和精简指令(RISC)处理器总线时序¾提供基于µC/OS-II的读写大容量设备(如:U盘、移动硬盘)驱动程序(HOST) ¾提供基于µC/OS-II的ZLG/USBD13软件包(Device)带底板不带底板z TFT6758 LCD彩色液晶显示屏(标配)¾玻璃片面积: 38.00×55.80 (mm)¾可视范围: 36.00×47.41 (mm)¾有效面积: 33.48×44.64 (mm)¾观察方向: 12:00¾颜色: 262K¾点数目: 240(RGB)×320¾驱动IC: HD66781/HD66783¾底板附带背光驱动电路(CAT32)¾直插接口,方便使用。
z GPRS模块(选配)¾工作频率900/1800/1900三频¾支持GSM/GRPS Class 4¾内置TCPIP协议栈¾带耳机话筒,可进行语音拨号、收发短信¾提供API函数库,用户简单调用即可拨号和收发短信¾双调试接口,可以连接SmartARM2200进行调试,也可独立外接DB9插座调试z GPS模块(选配) (点图可放大)¾精度为10米¾支持NWEA 3.0协议¾提供API函数库,方便用户读取经纬度、海拔、时间等数据z ISP1160 USB1.1 HOST PACK (选配)¾符合通用串行总线2.0规范¾支持全速(12Mbit/s)及低速(1.5Mbit/s)两种数据模式¾两个下行端口,可同时操作两个USB设备¾16位总线接口,微控制器与HC之间数据传输率最大为15M字节/S ¾兼容大多数通用微处理器和精简指令(RISC)处理器总线时序¾提供基于µC/OS-II的读写大容量设备(如:U盘、移动硬盘)驱动程序z ISP1181 USB1.1 Device PACK (选配)¾提供USB2.0(全速)USB设备控制器ISP1181B¾通过跳线选择8位或16位数据总线访问ISP1181B¾提供基于µC/OS-II的ZLG/USBD13软件包z PDIUSBD12 USB1.1 Device PACK (选配)¾PACK 板上集成PDIUSBD12 USB1.1电路¾可直接插入到SmartARM2200 教学实验平台上运行¾提供ZLG/USBD12软件包及应用实例1.4 无价配套资料(软件)z MiniGUI图形用户界面学习版源代码(µC/OS-II和µClinux版)zµC/OS-II(V2.52)在ARM7上移植代码zµClinux 2.4.x在LPC2200系列芯片上移植代码zµClinux-dist-20040408发行包z arm-elf开发工具包z多种商业化软件包¾移植µC/OS-II到ARM7软件包¾移植µCLinux到LPC2200软件包¾数据队列软件包¾串口驱动软件包¾MODEM接口软件包¾SPI总线软件包¾I2C总线软件包¾ZLG/GPS软件包(选配)¾ZLG/GPRS软件包(选配)¾ZLG/FS文件管理系统软件包¾ZLG/IP TCP/IP软件包¾ZLG/PPP协议软件包¾ZLG/CF CF卡及IDE硬盘软件包¾ZLG/SD SD/MMC读写软件包¾ZLG/FFS支持写平衡的NAND FLASH驱动软件包¾ZLG/HOST&Device固件程序及其驱动程序软件包¾ZLG/FTP-S 嵌入式FTP服务器软件包¾ZLG/BOOT Bootloader程序zµClinux驱动和源代码¾GPIO驱动¾I2C驱动¾SPI驱动¾ADC驱动¾PWM驱动¾块设备驱动¾网络设备驱动1.5 生动多媒体教学课件传统的嵌入式系统教学课件只是简单的罗列大段书本文字,这种“可以投影的电子书”在描述CPU体系结构及各控制寄存器的特性及难点时显得呆板而乏味,给教师授课和学生自学都带来了很大的障碍。
针对传统课件存在的这些问题,我们耗时半年之久,倾力制作了这部具有突破意义的多媒体课件。
该课件运用大量动画对嵌入式系统的重点和读者反馈的难点作了详尽的剖析,采用剥笋的方式逐步深入。
并认真听取一线教师的意见,对课件内容作了合理的设置,在紧扣教材主线的前提下进行了适当的补充。
因为课件对每个重要细节都作了细致的讲述,所以整个课件多达1200页。
用于教学时,授课老师可以根据课时安排,自行删节课件内容。
课件示例:将微控制器的P0.0引脚设置为输出高电平图片上半部分为相关硬件的当前状态,因为程序尚未执行,所以硬件处于不定状态。
执行第一条程序,设置引脚连接模块,把P0.0连接到芯片引脚。
执行第二条程序,设置IO口方向为“输出”。
执行第三条程序,设置IO口为高电平。
1.6 详尽配套教材《ARM嵌入式系统系列教程》内容简介本书是《ARM嵌入式系统系列教程》中的理论课教材。
以PHILIPS公司LPC2000系列ARM微控制器为例,深入浅出地介绍嵌入式系统开发的各个方面。
全书共分为3部分:第1章和第2章为理论部分,主要介绍嵌入式系统的概念及开发方法。
第3~5章为基础部分,主要介绍ARM7体系结构、指令系统及LPC2000系列ARM微控制器的结构原理。
第6~8章为应用部分,主要以LPC2000系列微控制器为例介绍如何设计嵌入式系统,包括硬件的设计、µC/OS-II的移植以及建立软件开发平台的方法。