地下管道检测机器人设计论文
管道清洁机器人毕业设计论文[管理资料]
![管道清洁机器人毕业设计论文[管理资料]](https://img.taocdn.com/s3/m/973c9e0afab069dc51220147.png)
目录1 绪论 (2) (2) (4) (12)2 管道机器人总体设计 (13) (13) (14) (15) (17) (22) (22) (26) (27) (28) (28)3 链传动的设计计算 (29) (29) (30) (30)4 蜗轮蜗杆的设计计算 (32)蜗轮蜗杆基本参数设计 (32) (32) (33) (34) (35) (36) (37) (37) (38) (43) (44)5 过弯道能力和其他部件设计 (46)弹簧的设计 (46) (47) (47) (48)6 管道机器人建模与仿真分析 (52)7 总结和展望 (56)参考文献 (59)致谢 (61)1 绪论用于石油、天然气乃至民用上下水等管道在传输液、气体过程中,因温度、压力不同及介质与管道之间的物理化学作用,常常会高温结焦,生成油垢、水垢,存留沉积物,腐蚀物等,使有效传输管径减少,效率下降,物耗、能耗增加,工艺流程中断,设备失效,发生安全事故。
尽管通过添加化学剂,采用合理的工艺流程,进行水质处理措施可以在一定程度上改善这些情况,但要完全避免污垢的产生是不可能的。
我国的管道清洗行业长期以来80%采用的是化学方法以及手工清洗和机械清洗方法,成本高、效率低、污染环境等,远远不能满足现代社会日益增长的要求。
探索和开发高效的清洗方法成为工业生产和人民生活的不可或缺的环节。
利用行星磨头清洗是一种新的清洗方法。
与化学清洗及手工、机械清洗相比,具有清洗质量好、效率高、适应性强、成本低等一系列优点,可达到返旧还新的效果。
作为一种清洁、高效、对环境无污染的清洗技术,具有可观的经济和社会效益。
随着经济的发展、人们生活水平的提高,人们对于食品卫生、健康的要求越来越高,环保意识越来越强,如何实现油烟管道高效率的清洗成了相关从业人员关注的问题。
本课题的研究目的是设计一种应用于清洗油烟管道的机器人,解决单独靠人力很难完成,甚至不可能完成的油烟管道清洗任务。
管道巡检机器人的设计与实现

管道巡检机器人的设计与实现随着工业自动化的不断发展,各行各业对于机器人的需求也越来越高。
在石油、化工等行业中,管道的巡检一直是一项重要且繁琐的工作。
传统的管道巡检方式需要人工参与,不仅费时费力,而且存在安全隐患。
因此,设计并实现一款管道巡检机器人成为了行业内的迫切需求。
一、设计理念管道巡检机器人的设计理念是结合机器人技术与无人机技术,通过对管道进行全方位的巡检,确保管道的正常运行。
机器人需要具备自主导航、障碍物避让、安全监测等功能,以应对复杂和危险的工作环境。
二、关键模块(一)自主导航模块:机器人需要通过激光雷达、视觉传感器等设备获取周围环境的信息,并通过内置的导航系统确定行进路径。
同时,机器人需要具备SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)能力,以保证行进轨迹的准确性和稳定性。
(二)机械臂模块:为了能够对管道进行全方位的巡检,机器人需要搭载灵活且可伸缩的机械臂。
机械臂上配备摄像头、传感器等设备,可以对管道的细节进行检查和记录。
机械臂模块还需要具备深度学习算法,能够对检测到的异常情况进行分析和预警。
(三)传感器模块:机器人需要搭载各种传感器,如温度传感器、振动传感器、气体检测传感器等,以实时监测管道的运行状态。
这些传感器要能够准确感知管道内部的各项指标,并将数据传输给控制中心,以便对异常情况及时处理。
(四)通信模块:机器人要能够与控制中心实时进行数据交互和信息传输。
通过无线通信技术,机器人可以将巡检数据、管道状态等信息上传到云端,以供后续的数据分析和处理。
三、实现技术(一)导航定位技术:利用激光雷达、视觉传感器等设备获取机器人周围环境的信息,通过内置的导航系统进行路径规划和优化,从而实现自主导航的能力。
(二)机械臂技术:采用灵活且可伸缩的机械臂,通过精确控制机械臂的运动,实现对管道的巡检。
同时,机械臂上配备的摄像头、传感器可以获取管道内部的详细信息。
毕业设计-管道检测作业机器人(总体设计)
机电工程学院中南大学本科生毕业论文(设计)题目管道检测作业机器人总体设计学生姓名XXXX指导教师XXXX学院机电工程学院专业班级机电XXX班完成时间2010年6月8日中南大学毕业论文(设计)任务书毕业论文(设计)题目管道检测作业机器人总体设计题目类型]1[工程设计题目来源[1]___教师科研题毕业论文(设计)时间从2010年3 月1 日至2010年6 月8 日毕业论文(设计)内容要求:(1)技术指标:(a)自适应管道直径为270-300mm,驱动力>800N;(b)在管道内的移动速度大于10cm/s;(c)能通过曲率半径600mm,总长为10m的倒U型管道;(4)能够搭载微型CCD和无损检测传感器对管道内的裂纹和腐蚀缺陷等进行检测与修补作业。
(2)完成总体方案设计、总体布局和结构确定,行走机构原理设计、控制电机选型等。
(3)要求具有电缆控制和遥控两种功能。
完成传感检测原理与检测作业功能装置设计与控制系统方案。
1.具体完成下列设计工作:(1)查阅文献和实习,了解国内外管道检测作业机器人的现状和发展趋势,并翻译相关资料一篇;(2)按要求完成管道检测作业机器人功能设计与总体方案设计;(3)完成管道检测作业机器人总体布局、结构设计计算与行走方式确定;(4)完成传感检测系统方案、传感器选型与检测功能布置设计;(5)整理相关资料,撰写设计说明书。
要求设计图纸不少于4张1#图,设计说明书不少于50 页。
[1]题目类型:(1)理论研究(2)实验研究(3)工程设计(4)工程技术研究(5)软件开发[2]题目来源:(1)教师科研题(2)生产实际题(3)其它2.主要参考资料1)成大先主编.机械设计手册.北京:化学工业出版社,20022)刘政华,何将三.机械电子学.长沙:国防科技大学出版社,1999.103)杨培元,朱福元主编. 液压系统设计简明手册. 北京:机械工业出版社,19944)《电气工程师手册》第二版编辑委员会编. 电气工程师手册. 北京:机械工业出版社,20005)沈红卫编著. 单片机应用系统设计实例与分析. 北京:北京航空航天大学出版社,20036)黄菊生编著. 单片机原理与接口技术. 北京:国防工业出版社,20073.毕业论文(设计)进度安排指导教师(签名)____________ 时间:__________________系(所)主任(签名) ____________ 时间:_________________主管院长(签名)______________ 时间:__________________中南大学毕业论文(设计)成绩评定表(一)指导教师评语XXX同学在毕业设计过程中,态度较积极主动,工作较扎实认真,较好地完成了毕业设计任务书规定的工作任务——管道检测机器人总体设计。
管道检测机器人_毕业设计
管道检测机器人1 引言管道运输是当今五大运输方式之一,已成为油气能源运输工具。
目前,世界上石油天然气管道总长约200万km,我国长距离输送管道总长度约2万km。
国家重点工程“西气东输”工程,主干线管道(管径1118mm)全长4167km,其主管道投资384亿元,主管线和城市管网投资将突破1000亿元。
世界上约有50%的长距离运输管道要使用几十年、甚至上百年时间,这些管道大都埋在地下、海底。
由于内外介质的腐蚀、重压、地形沉降、塌陷等原因,管道不可避免地会出现损伤。
在世界管道运输史上,由于管道泄漏而发生的恶性事故触目惊心。
据不完全统计,截至1990年,国内输油管道共发生大小事故628次。
1986到2b00年期间美国天然气管道发生事故1184起,造成55人死亡、210人受伤,损失约2. 5亿美元。
因此,研究管道无损检测自动化技术,提高检测的可靠性和自动化程度,加强在建和在役运输管道的检测和监测,对提高管线运输的安全性具有重要意义。
1.1管道涂层检测装置的发展、现状和前景1.1.1管道涂层检测装置的发展管内作业机器人是一种可沿管道自动行走,携有一种或多种传感器件和作业机构,在遥控操纵或计算机控制下能在极其恶劣的环境中进行一系列管道作业的机电仪一体化系统.对较长距离管道的直接检测、清理技术的研究始于本世纪50年代美、英、法、德、日等国,受当时的技术水平的限制,主要成果是无动力的管内检测清理设备——PIG,此类设备依靠首尾两端管内流体的压力差产生驱动力,随着管内流体的流动向前移动,并可携带多种传感器.由于PIG本身没有行走能力,其移动速度、检测区域均不易控制,所以不能算作管内机器人.图1所示为一种典型的管内检测PIG[5]. 这种PIG的两端各安装一个聚氨脂密封碗,后部密封碗内侧环向排列的伞状探头与管壁相接触,测量半径方面的变形,并与行走距离仪的旋转联动,以便使装在PIG内部的记录仪记录数据.它具有沿管线全程测量内径,识别弯头部位,测量凹陷等变形部位及管圆度的功能,并可以把测量结果和检测位置一起记录下来. 70年代以来,石油、化工、天然气及核工业的发展为管道机器人的应用提供了广阔而诱人的前景,而机器人学、计算机、传感器等理论和技术的发展,也为管内和管外自主移动机器人的研究和应用提供了技术保证.日、美、英、法、德等国在此方面做了大量研究工作,其中日本从事管道机器人研究的人员最多,成果也最多。
管道检测机器人自适应运动机理研究与机构设计

管道检测机器人自适应运动机理研究与机构设计管道检测机器人自适应运动机理研究与机构设计随着工业自动化的快速发展,管道检测机器人作为一种重要的无人操作设备,广泛应用于石油、化工、供水等领域。
然而,传统的管道检测机器人在进行复杂管道内部的检测任务时,往往面临着机器人体积大、机构复杂、运动不稳定等问题。
本文将探讨管道检测机器人的自适应运动机理研究与机构设计,旨在提高机器人在管道内的运动稳定性和适应性。
一、管道检测机器人自适应运动机理研究自适应运动机理是指机器人在管道内部行驶时,能够根据环境条件的变化,自主调整运动参数以适应不同的工作场景。
在机器人的运动控制系统中,引入传感器和反馈机制是实现自适应运动的关键。
通过视觉传感器、陀螺仪等传感器采集周围环境的信息,并将这些信息反馈给机器人的控制系统,从而实时调整机器人的运动参数,保证机器人的稳定性和安全性。
除了传感器和反馈机制,自适应运动机理还涉及到路径规划和运动轨迹控制。
在管道内部行驶过程中,机器人需要根据管道的曲率、内部障碍物等信息,选择合适的路径,并通过控制机构的运动实现精确的轨迹控制。
因此,研究机器人的路径规划算法和运动轨迹控制策略,对提高机器人的自适应运动能力具有重要意义。
二、管道检测机器人机构设计机器人的机构设计在保证机器人功能的基础上,还要考虑到机器人在管道内部的运动稳定性和适应性。
传统的管道检测机器人通常采用履带或轮式结构,但这种机构存在着运动不稳定和容易卡住的问题。
为了解决这些问题,本文提出了一种基于气动推进的管道检测机器人机构设计。
该机构设计采用气动推进技术,通过喷射气体产生的推力来推动机器人在管道内行驶。
相比于传统的履带或轮式结构,气动推进机构具有更好的运动稳定性和适应性。
在设计过程中,需要考虑机器人重心的位置、推进力的大小和方向等因素,以实现机器人在管道内的平稳行驶。
此外,为了进一步提高机器人的适应性,还可以在机器人的机构中引入柔性结构。
【论文】管道检测机器人结构设计及运动仿真

摘 要管道检测机器人主要包括三大系统:机械系统、控制系统和检测系统。
本文在分析了机器人总体机械结构和检测原理的基础上,通过精确的力学计算和细致的结构分析,利用AutoCAD软件对机器人的机械部分,包括整体结构、电机、齿轮、轴等进行了选择与设计,并对设计方案进行分析与计算。
然后利用Solid Edge软件将管道检测机器人的总体机械结构绘制成三维立体模型。
所设计的机器人机械系统,可通过履带式移动机构满足城市排水管道的工况,并通过加装支撑臂进行30度的爬坡。
通过细致研究,确定了机器人所使用的摄像系统和超声波检测系统。
关键词:排水管道,履带式机器人,超声波无损检测AbstractA pipeline inspection robot mainly consists of three parts, the mechanical system, the control system and the detecting system. This paper, based on the analysis of overall mechanical structure and detecting principle of the robot, by accurate mechanical calculation together with comprehensive structure analysis, the author has worked out a unique design for overall structure in AutoCAD software, motor, gears as well as axles of the robot, and the design scheme has been analyzed and calculated. Then built overall mechanical structure of pipeline inspection robot 3-D models in Solid Edge software. The design of mechanical system of the pipeline inspection robot is equipped with the tracked mobile mechanism moves along the urban drainage pipelines and two support arms can climb maximum gradient of 30 degrees. And after careful study, the camera system and the ultrasonic inspection system of the robot are also determined in the paper.Key words: Drainage pipeline, Tracked robot, Ultrasonic nondestructive inspection目 录第一章 绪 论 (1)1.1课题研究意义及背景 (1)1.2管道检测机器人的发展 (3)1.2.1管道检测机器人发展情况 (3)1.2.2 管道检测机器人类型介绍 (7)1.3管道检测机器人的技术 (9)1.4 课题研究主要内容 (9)1.5本章小结 (10)第二章 管道检测机器人机械结构设计方案确定 (11)2.1管道检测机器人移动方式结构设计 (11)2.1.1管道检测机器人移动方式分析比较 (11)2.1.2管道检测机器人移动方式选择 (13)2.2管道检测机器人总体机械结构设计 (14)2.3本章小结 (15)第三章 管道检测机器人机械结构设计计算 (16)3.1 管道检测机器人力学分析计算 (16)3.2 管道检测机器人执行机构设计 (18)3.2.1传动齿轮的设计计算 (18)3.2.2传动轴的设计计算 (25)3.3 管道检测机器人驱动系统设计 (29)3.3.1步进电机的选择 (31)3.4 本章小结 (33)第四章 管道检测机器人附属配置 (35)4.1能源供给方式的选择 (35)4.2 摄像系统的选择 (35)4.3检测系统的选择 (36)4.4电源装置的选择 (38)4.5控制装置的选择 (38)III4.6本章小结 (38)第五章 管道检测机器人三维模型设计 (39)5.1移动机构三维模型设计 (39)5.2 支撑臂机构三维模型设计 (41)5.3车体结构三维模型设计 (41)5.3.1车体内部结构三维模型设计 (41)5.3.2车体上方结构三维模型设计 (42)5.3.3车体前方结构三维模型设计 (43)5.4整体结构三维模型设计 (43)5.5本章小结 (45)第六章 管道检测机器人稳定性分析 (46)6.1承载能力 (46)6.2检测系统 (47)6.3质量优化 (47)6.4本章小结 (48)第七章 经济技术分析报告 (49)第八章 总结与展望 (50)8.1总结 (50)8.2展望 (50)参考文献 (52)致 谢 (54)声 明 (55)IV第一章 绪 论1.1 课题研究意义及背景近年来,随着我国经济的快速发展,城市发展的步伐也逐渐加快,煤气、输水、油气、通讯、化工以及其他用途的管道急剧增加。
毕业设计(论文)--管道机器人行走机构设计[管理资料]
![毕业设计(论文)--管道机器人行走机构设计[管理资料]](https://img.taocdn.com/s3/m/990d4cecfad6195f302ba6ee.png)
毕业设计(论文)--管道机器人行走机构设计摘要管道运输在我国运用比较普遍,管道长期处于压力大的恶劣环境中,受到水、油混合物、硫化氢等有害气体的腐蚀。
这些管道受蚀后,管壁变薄,容易产生裂缝,造成漏油的问题,存在重大安全生产隐患和济济损失。
因此研究工程应用中的管道机器人具有很高的实用价值和学术价值。
根据这些问题,我们设计一种新的行走机构并分析了其总体机械结构。
本文进一步介绍了当前国内外的管道机器人的发展现状并提出了一种新的管内行走机构。
它利用一个电机同时驱动均布在机架上并与管内壁用弹簧力相封闭的六个行进轮,从而实现了可以轴向直进全驱动的管内行走。
接着本论文重点对直进轮式管道机器人的运动机理和运动特征进行了分析和介绍。
根据管道机器人的设计要求选择电机,介绍了电机选择过程,对其中关键的机械部件如蜗轮蜗杆传动部件、齿轮等进行了设计。
该机器人具有较大的承载能力,可以在较高的速度下实现连续移动,由于该机构采用弹性装置支撑,所以该机构的管径适应性增大,是一种具有实用价值的移动机构形式……关键词:管道机器人;行走机构;弹性装置AbstractIn our country, pipeline transportation is very universal, and pipeline is in high pressure circumstance. Because pipes are corroded by the water, the oil mixture, the hydrogen sulfide, the noxious gas corrosion and so on. When these pipelines were corroded, their walls would become thin and result in cracks and oil leak, there is safety incipient fault in production and economic loss. So the key technology and further research development trend of in-pipe robot are discussed.According to these problems, we designed a new mobile mechanism and analyzed its machine structure. In this paper, the current states of in-pipe robot are described and a new type of mobile robot mechanism moving in pipe is presented. It uses two motor to drive six wheels which distribute symmetrically on the robot body and a wheels are pushed on the wall of pipe by spring force,so that the six driving wheels move along the axis of pipe. This kind of mobile robot mechanism has high efficiency,simple structure and easy to manufacture and to mount.Then the papers focus on direct pipeline into the wheeled robot's movement and the movement of an analysis and presentation. According to the pipeline robot design requirements choose Motors, introduced the motor selection process, of which the key mechanical components such as worm transmission parts, such as a gear design. The robot with the larger carrying capacity, can achieve higher speeds for mobile, as the agenciesadopt a flexible device support, the agency increased the diameter of adaptability, is a kind of practical value in the form of body movement.Keywords: In-pipe Robot; Mobile mechanism; Flexible device摘要IAbstract II1绪论 1128102管道机器人总体方案设计1111式 1112式 13173管道机器人的移动机构分析与设计181819动机构的原理19动机构的特点1921由度分析21度分析21析时的一些假设条件23构前进时的受力分析2427机的选择27位的设计计算29设计31选择31簧的设计3232径大小的影响32道机器人适用的管道口径334直进轮式管道机器人实体建模34343536375总结 38参考文献40致谢41附录421 绪论管道作为一种有效的物料输送手段,在一般工业、核设施、石油天然气、军事装备等领域中都得到广泛的应用,本题目要求设计一个结构紧凑的管道内行走装置,提高驱动效率。
管道检测机器人的设计与开发

管道检测机器人的设计与开发摘要:设计了针对管径为200 ~ 250mm的管道检测机器人,其中包括移动载体、总体技术路线、数据采集和传输系统的设计。
关键词管道检测机器人移动载体总体技术路线数据采集与传输冶金、石油化工及城市水暖供应管道系统的工作环境十分恶劣,长久使用后易出现腐蚀、疲劳破坏最终引发泄漏事故。
对管道系统实行定期检测、诊断、清理和维护越来越受到人们的重视。
无损检测已成为管道检测的一项重要技术,尤其是管道在役和在线探查成为无损检测技术应用发展的重要方向之一,但是由于管道所处的工作环境常常是人力所不能及,检修非常困难,目前对重要和不允许泄漏的管道采用定期和提前报废的方法。
假如采用管道检测机器人对管道进行定期检测、诊断、清理和维护,可以避免巨大的人力、物力及财力的浪费。
笔者研究了管道检测机器人工作原理和检测系统设计方法,为开发管道检测机器人技术打下一定的基础。
1 管道检测机器人系统总体概述管道检测机器人系统主要由移动载体(管道机器人)、传感器、信号传输、驱动、数据采集传输及管内环境识别装置等组成,其中传感器和信号传输装置是核心部分。
该机器人在操作人员的程序控制下对管道进行一系列的检测和诊断。
笔者设计与研发的机器人是一种较为理想的管道自动化检测设备,该管道检测机器人应满足以下几个条件:a.能够使检测方便、直观、高效;b.在满足工作要求的前提下,机器人的成本经济适用、驱动方式应容易实现;c.在设计过程中必须对移动载体、数据采集及传输系统和信号传输系统进行详细的研究和模拟,以便适应不同的工作环境;d.硬件技术成熟,系统搭建简单,可靠性高;e.软件开发工具和资源丰富,便于开发和算法的实现;f.为了避免信号失真,确保数据传输质量,在实际工作中对信号采用无线传输。
2 管道检测机器人的设计2. 1 移动载体管道机器人作为检测系统的载体,是工作附件的运载工具,驱动电机、控制系统、检测模块都安装在其上,为保证其重量轻,采用了铝合金材料。
地下管道清掏助手机器人系统的设计与研究
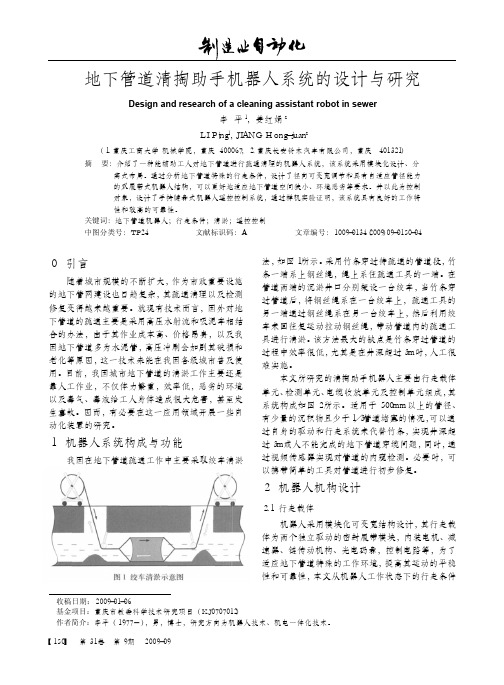
【150】第31卷第9期2009-09地下管道清掏助手机器人系统的设计与研究Design and research of a cleaning assistant robot in sewer李 平1,姜红娟2LI Ping1, JIANG Hong-juan2(1. 重庆工商大学 机械学院,重庆 400067;2. 重庆长安铃木汽车有限公司,重庆 401321)摘 要:介绍了一种能辅助工人对地下管道进行疏通清理的机器人系统,该系统采用模块化设计、分离式布局。
通过分析地下管道特殊的行走条件,设计了径向可变宽调节和具有自适应管径能力的双履带式机器人结构,可以更好地适应地下管道空间狭小、环境恶劣等要求。
并以此为控制对象,设计了手持键盘式机器人遥控控制系统,通过样机实验证明,该系统具有良好的工作特性和较高的可靠性。
关键词:地下管道机器人;行走条件;清淤;遥控控制中图分类号:TP24 文献标识码:A 文章编号:1009-0134(2009)09-0150-040 引言随着城市规模的不断扩大,作为市政重要设施的地下管网建设也日趋复杂,其疏通清理以及检测修复变得越来越重要。
就现有技术而言,国外对地下管道的疏通主要是采用高压水射流和吸泥车相结合的办法,由于其作业成本高、价格昂贵,以及我国地下管道多为水泥管,高压冲刷会加剧其破损和老化等原因,这一技术未能在我国各级城市普及使用。
目前,我国城市地下管道的清淤工作主要还是靠人工作业,不仅体力繁重,效率低,恶劣的环境以及毒气、毒液给工人身体造成很大危害,甚至发生事故。
因而,有必要在这一应用领域开展一些自动化装置的研究。
1 机器人系统构成与功能我国在地下管道疏通工作中主要采取绞车清淤收稿日期:2009-01-06基金项目:重庆市教委科学技术研究项目(KJ0707012)作者简介:李平(1977-),男,博士,研究方向为机器人技术、机电一体化技术。
法,如图1所示。
采用竹条穿过待疏通的管道段,竹条一端系上钢丝绳,绳上系住疏通工具的一端。
管道机器人文献综述

管道机器人文献综述一个联动类型机械式离合器管道检测机器人摘要本文提出了一种新的管道检查机器人联动型机械式离合器,它被设计用于直径100mm的管道进行检查。
该机器人具有三动力轮链的每一个都有一个机械离合器。
使用并行设计的机械式离合器联动机制。
管道的运动模型的检测机器人被驱动,并且已经开发它的原始类型。
该机器人系统的性能都会验证仿真和实验。
引言管道机器人机制,它在机器人技术的发展上具有悠久的历史,可以分为几种初等形成的运动模式。
因此,已经开发了许多种机制轮型,尺蠖型,腿式移动型等,螺杆式,履带式,猪型和被动型。
其中,轮型管道检测机器人大多是流行 [1] - [9]。
在近10年中,差分驱动型机制进行了研究集中在[10] - [12]。
差分驱动型通常有三动力链。
每条链的速度控制独立,机器人能够通过肘部和T-支行。
此外,它有一个大的折叠范围较轮型,螺旋型,PIG型。
近日,管道检测机器人系统与其超过100毫米的小直径已经被关注、自从100mm的管道市场是越来越大了。
该大多数室内管道的直径小于100mm。
具体来说,清除室内管道直接有关人类健康。
因此,清洗和检查在内部管道成为一个重要问题。
通常情况下,管道巡检机器人系统是由机器人机构组成,通信系统,一个电源供应,而中一个用户界面。
然而,为了将它应用到真正的的环境中,一些实用的的方面(,如易用的用户)的界面,安全性,水的的证明,和检索功能应该定考虑在内。
具体而言,检索功能至关重要的,因为管道内工作的机器人,可以是无序的任何时间。
此外,机器人可以卡在在操作过程中的任何原因的管道。
在这种情况下,机器人需要采取的管道,通过使用一些检索功能。
离合器的概念是一个很好的解决方案检索功能的实现。
有两种类型的离合器机械离合器磁粉离合器。
通常,该机械式离合器保证了强劲的动力,但它通常是大型,重型,具有复杂的结构。
在相反,电磁离合器相对小尺寸,重量轻,有一个简单的结构,但它在电力中有一个限制。
管道机器人毕业设计(论文)简介

φ700mm-φ1000mm管道机器人构造设计摘要在工农业消费及日常生活中,管道应用范围极为广泛。
在管道的使用过程中,会产生管道堵塞与管道故障和损伤,需要定期维护、检修等。
但管道所处的环境往往是人们不易到达或者不允许人们直接进入,所以开发管道机器人就显得尤为重要。
以金属冶炼厂管道清洁机器人为研究目的,根据其工作环境和技术要求设计了一种可适应φ700mm-φ1000mm管道的管道清洁机器人。
该管道机器人采用三履带式的可伸缩行走装置,操作装置为2个自由的的操作臂,末端操作器上安装有吸尘头,吸尘头吸起的灰尘通过吸尘软管搜集在装灰箱体内。
当灰尘装满后,机器人行走到倒灰口,翻开卸料门,将灰尘倒掉。
本次设计主要对管道清洁机器人进展构造设计,利用三维参数化特征建模软件Pro/Engineer建立了管道清洁机器人的三维模型,生成了机器人主要零部件的工程图。
对管道机器人中的主要机构进展动态仿真,验证了所设计机构的正确性。
最后对主要零部件进展了设计校核计算,并简单表达了该机器人控制方案。
关键词:管道清洁机器人;构造设计;三维建模AbstractPipeline is very often applied on industry and agriculture production and daily life. Because pipeline is possibly jammed and distressed, it needs to be maintained and repaired and so on. However it is difficult to reach or do not allow directly accessing in pipeline, so exploiture of pipeline robot is particularly important.Regarding in-pipe clearing dust robot in exhaust gas pipeline of metal smeltery as the research object, based on working environment and technology requires of the robot, a kind of pipeline robot which is capable o f adapting φ700mm-φ1000mm pipe is designed. The robot has three-pedrail and extend-retract locomotion equipment, its operation device is 2-DOF arm, ender operation is a nose-dust-collector, dust is collected in box loading dust through tube. When the box is loaded up, the robot runs to dump opening and discharge opening is opened, and dust is unloaded. In the design, pipeline robot structure is detailedly designed. Pipeline cleaning robot model is built in three-dimensional modeling software Pro/Engineer, robot drawing is built. Robot mechanism is simulated, and it verifies project of robot to be correct. In the end mostly parts are checked and analysed, and robot control project is simply illuminated.Keywords:Pipe Cleaning Robot;Structural Design;Three-dimensional Modeling一、本课题研究背景及意义在工农业消费及日常生活中,管道作为一种重要的物料运输手段,其应用范围极为广泛。
一种管道机器人的结构设计与性能分析

一种管道机器人的结构设计与性能分析管道机器人是一种专门用于管道内部检测和维护的机器人。
它具有强大的适应性和灵活性,并且可以在不同形状、尺寸和材料的管道内进行操作。
在实际应用中,管道机器人能够有效地提高工作效率,减少人力资源和维修成本。
本文将探讨管道机器人的结构设计和性能分析。
一、管道机器人的结构设计1.机身结构管道机器人的机身主要由外壳、底盘和轮子组成。
外壳通常由高强度塑料或金属材料制成,具有较强的耐油、耐温和耐磨损性能。
底盘可以根据管道的不同形状适当调整,以保证机器人在管道内能够保持平衡和稳定性。
轮子的设计通常考虑到摩擦力和稳定性,使机器人能够有效地在管道内运动。
2.传动系统传动系统是管道机器人的核心组成部分之一,它由马达、传力装置、减速器和轮子等组成。
机器人的前后进和转向操作由传动系统中的电动机和减速器等组成。
同时,在机器人的设计过程中,减速器的设计需要根据机器人的重量和管道内的摩擦系数等因素来确定。
此外,传动系统必须确保机器人的稳定性和可靠性,以保证机器人在工作时能够持续高效地运动。
3.传感器系统传感器系统主要用于管道机器人的定位、检测和监控。
其中包括云台式摄像头、温度探头、湿度探头和烟雾探头等。
这些传感器能够对管道内的各项数据进行实时监测和分析,确保机器人在管道内能够准确获取所需信息。
4.电源系统电源系统主要包括电池、变压器、关联线路和充电设备等。
机器人的电源系统必须满足续航时间、充电效率和使用寿命等方面的高标准要求。
电池通常采用高效锂电池,具有较长的使用寿命和稳定性。
5.控制系统管道机器人的控制系统是机器人的灵魂,可以实现对机器人的远程操作、精准导航和实时数据监测等。
在控制系统中,主要包括单片机、编码器、传感器和通讯模块等,它们能够协调控制机器人的动态性能和定位精度等。
二、管道机器人的性能分析1.运动性能针对管道机器人在不同管道内的运动性能分析,主要包括前、后进速度和克服管道摩擦力等研究。
管道检测机器人的设计和系统分析

Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 121【关键词】管道检测机器人 图像采集系统 控制系统设计 电力供给系统随着国家经济的飞速发展,管道使用范围不断扩大,对管道质量的要求也随之提高,但是在长期使用的过程中,管道必然会出现裂纹、漏孔等故障,因此必须要定期对管道进行排查和养护。
但是因为一部分管道内部可能含有有毒气体,如果采用人工的方式展开养护检测工作,会给工作人员造成身体上的伤害。
因此,采用管道检测机器人来代替人工,但是,很多管道检测机器人的设计和系统还需要得到完善。
1 管道检测机器人系统概述管道检测机器人系统应用在管道内部检查工作中,可以帮助工作人员更好的检查管道内表面的质量,及时开展相应的修补工作,而且机器人可以代替工作人员进入一些环境恶劣、管径较小、含有毒气的管道。
一般情况下,管道检测机器人有以下几个方面组成,分别为:机器人机械本体、图像采集、地面监控、电力供给这四个部分。
其中机器人机械本体主要承担着支撑机器人行走的工作,同时作为系统云台辅助图像采集、地面监控、电力供给完成工作任务。
图像采集系统中除了摄像设备之外,还需要安装光源、传感器、扫描设备等零部件,以此保证图像采集任务圆满完成。
而地面监控系统是由计算机组成,针对机器人在管道内的运行情况进行监控,并且对图像采集系统传过来的图片进行处理分析,具体判断管道内的实际情况,明确出现缺陷的位置、缺陷的危害程度以及缺陷等级等的信息,还要根据上述信息,借助计算机技术给出最优方案。
除了上述几个方面之外,电力供给支撑着管道机器人运行,作为能量来源,是保证上述系统正常工作的基础。
在实际工作中,工作人员通过计算机发出指令,让管道机器人进入管道并且在规定速度下在管道内运行,通过安装在管道机器人机械本体上图像传感器和图像采集系统,将管道内管道检测机器人的设计和系统分析文/吴忠海的实际情况传递给监控系统,让工作人员及时的了解到管道内部状态,同时,还会传递管道内的环境参数和机器人自身状态,让工作人员可以更加精准的操纵管道机器人,完成管道信息采集工作。
基于机器人的管廊环境监测系统设计
• 187•基于机器人的管廊环境监测系统设计河南理工大学电气工程与自动化学院王 隽 郭金丽柴柯雅 张宏伟城市地下管廊是保障城市运行的重要基础设施和“生命线”。
针对传统人工检测存在的问题,设计开发了一种以移动机器人为终端的城市管廊环境监测系统,通过Wi-Fi无线通信将机器人采集到的环境信息传至上位机,实现了管廊环境移动监测。
论文设计了电源电路、电机驱动电路、传感器检测电路,给出了程序流程。
该系统可以实现不间断反复巡检,提高自动化水平,减人增效。
引言:地下综合管廊的运维情况及其复杂,传统管廊监控需要人员频繁入廊进行巡检工作,存在工作负荷高、漏检错检、人员安全保障等一系列问题。
巡检人员不可能完全实时掌握地下管廊运行工况,定点监测很可能出现盲区。
在本系统中,巡检机器人能够不间断地巡检,采集、分析数据,预判设备不良工况,及时发现隐患,实现对设备运行状态和运行环境的智能监测。
综合管廊智能机器人巡检系统就是用自动化、移动机器人、无线传输、多传感器检测等技术对地下综合管廊进行信息化管理,为综合管廊运行维护、指挥调度提供一套智能、高效的信息服务平台。
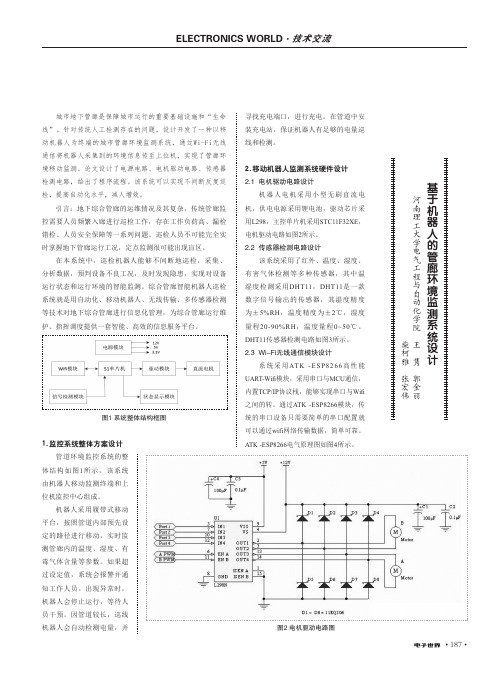
图1 系统整体结构框图1.监控系统整体方案设计寻找充电端口,进行充电。
在管道中安装充电站,保证机器人有足够的电量巡线和检测。
2.移动机器人监测系统硬件设计2.1 电机驱动电路设计机器人电机采用小型无刷直流电机,供电电源采用锂电池,驱动芯片采用L298,主控单片机采用STC11F32XE ,电机驱动电路如图2所示。
2.2 传感器检测电路设计该系统采用了红外、温度、湿度、有害气体检测等多种传感器,其中温湿度检测采用DHT11,DHT11是一款数字信号输出的传感器,其湿度精度为±5%RH ,温度精度为±2℃,湿度量程20-90%RH ,温度量程0~50℃。
DHT11传感器检测电路如图3所示。
2.3 Wi-Fi无线通信模块设计系统采用AT K -E S P 8266高性能UART-Wifi模块,采用串口与MCU 通信,内置TCP/IP 协议栈,能够实现串口与Wifi之间的转。
管道检测机器人的运动学建模【论文】

管道检测机器人的运动学建模摘要:本文针对管道检测问题,首先介绍了管道检测机器人的系统组成,在此基础上,根据真实的圆柱形管道,推到了单个轮子在管道曲面上满足纯滚动和无侧滑条件下轮心速度的数学描述。
此外,根据机器人在圆管中的几何约束,建立了姿态坐标和空间位置坐标之间的关系,最终完成了管道机器人的运动学建模。
关键词:管道;检测机器人;运动约束;运动学模型.引言管道是当前普遍采用的一种油气输送方式[1]。
长时间使用过程中受腐蚀、重压等作用影响,管道不可避免地会出现裂纹、变形等现象,影响生产安全。
由于管道环境极其恶劣,很多检测工作是人工无法完成的,管道检测机器人则成为一种非常必要的检测设备[2-4]。
管道检测机器人集成有多种检测仪器,可以自主或人为地沿着管线进行工况检测工作。
本文介绍了管道检测爬行机器人的组成,建立了管道约束下机器人的运动学建模,为后续的设计分析提供理论指导。
一、管道机器人总体组成为了满足管道检测的工作要求,管道检测机器人应具有良好的定心性、较高的越障能力、良好的通过性、较大的驱动输出特性和较高的驱动效率等特性。
本文所述机器人的系统组成如图1所示,各部分的组成及功能如下:图 1. 机器人系统组成1.机器人本体机器人本体是指机器人进入管道内的移动作业部分,载体为四轮双驱动方式。
本体内部承载有电机驱动、通讯、控制等设备,可以实现本体的前进、后退、左转、右转等动作并且具有防水、耐压、耐腐蚀等功能。
2.电力供给系统根据机器人的供电需求,电力供给方案采用外部光电复合缆直流供电,该直流电来自上位机控制箱的开关电源将交流电转换为直流电、AC/DC 转换及多路输出,实现机器人工作的电力需求。
3.扫描仪云台系统将二维激光扫描仪安装在由电机驱动的旋转轴上就可以实现对管道的三维扫描,将扫描到的管道点云,通过坐标变换、ICP算法等实现管道的三维重建。
扫描仪云台的高度也可以实现自动调节。
4.摄像头云台系统摄像头云台系统携带有可自动变焦的CCD摄像机[5],摄像头运动由两个电机驱动:旋转电机和俯仰电机,能实现摄像头的整周旋转和俯仰运动,从而完成CCD对被检测管道的全方位的视角调整能力。
基于管道机器人智能检测技术研究

基于管道机器人智能检测技术研究管道机器人智能检测技术研究在各行各业中,随着科技的不断发展,越来越多的传统行业开始应用人工智能技术,以提高工作效率和品质,其中就包括了管道检测行业。
管道智能检测技术作为智慧城市中的一部分,受到了广泛的关注和重视。
管道机器人技术是一种基于机器视觉和机器学习等高新技术的管道检测方式。
由于传统的管道检测方式往往需要人工进行,操作繁琐,精度限制较大,造成工作效率低下和可靠性差的问题。
因此,采用管道机器人技术进行管道检测不仅可以有效提高工作效率,同时也提高了检测的精度和可靠性。
管道机器人技术主要由机器人本身,管道的传感器和检测系统组成。
这个系统不仅反应了人工智能技术的深度融合和发展,同时也展现了合理、高效、精准的检测方法。
这种技术使用机器人等多种设备,可通过多种手段进行检测,比如全景相机、红外摄像头、超声波、磁带等等。
这些设备可以常年持续工作,对环境和管道等参数进行全方位测验和记录,保证了管道的质量和稳定性。
在实际应用中,管道机器人技术的检测方法也非常相似于一般的机器人工作。
机器人系统可针对各种对管道质量的检测和修复,增加进一步原理和流程,保证了检测与修复的顺畅性和准确性。
然而管道机器人技术并非是一种通用的技术,其技术要求和研究要求都比较高,因此在实际应用中,我们更需要密切配合、多重交换和大力加强它的研发。
其中关键问题之一就是对管道机器人技术所使用的系统能够顺利运行和操作,达到高效的质量和量产能力。
为此,需要对每一个环节进行全面考虑和规划,确保其稳定和安全的运行,提高它的应用和普适性。
这种与管道机器人技术相配合的规模化、集中式应用模式已经证明是一个可行的技术实现和经济运作方式。
同时也突显了其特异性和实用性。
综上所述,管道机器人智能检测技术的研究和应用一直是一个值得探究和投入的重要领域。
通过使用高科技手段和多元化的探测方式,管道机器人技术对传统管道检测方式的改进,使其具有更快、更有效、更精准等很多方面的优势。
面向地下空间的智能轨道巡检机器人系统研究

4Internet Communication互联网+通信一、引言随着IT 技术的高速发展,在土木工程领域内运用高新技术手段,如智能化、机械化的装备,监控地下空间/隧道的状态,并对病害预识别和预警,对地下空间是否能健康运营管理和安全耐久使用、避免造成非必要的损失,有着至关重要的意义[1]。
那么如何利用隧道智能巡检机器人[2]及其相应的集成化技术,实时掌握、处理和发布地下空间/交通的运行情况和预警信息,提高地下空间内的安全应急反应力,同时向管理人员、司机、乘客及相关人员提供方便、快速、有效的行车安全预警信息服务[3-4]。
本文从隧道现场的实际需求出发,提出了一种面向地下空间的智能轨道巡检机器人系统,该机器人是一款结合物联网、机器人和人工智能技术的现代化基础设施管理智能装备。
该机器人分为巡检机器人-本体、轨道系统和远程控制中心系统。
二、巡检机器人-本体巡检机器人-本体接收远程操控系统的命令控制,驱动相关执行器来输出机械机构,同时将机械机构的状态、环境信息与机器人的运行状态由网络通信传输给远程控制中心系统,将进行相关信息处理。
巡检机器人-本体具有走行、智能感知、毫米级定位、无线充电等功能。
(一)巡检控制系统为实现高度自动化和智能化,该巡检控制系统可实现在地下空间内自主地进行的巡检。
机器人-本体按照管理员预先设定的模式巡检任务,通过任务规则自动完成对周边环境、设备等监测活动。
巡检任务模式分为2种:自动化巡检和手动遥控巡检。
1.自动化巡检自动化巡检即通过预设路线进行巡检任务,自动面向地下空间的智能轨道巡检机器人系统研究摘要:为了提升隧道交通安全的应急联动能力和节约运营管理,我们研制开发了一种应用于地下空间的智能轨道巡检机器人系统技术及方案设计,本文详细描述了巡检机器人-本体设计、轨道系统设计和远程控制中心系统设计。
机器人的巡检控制系统能够进行5种模式的巡检,各模式灵活切换,满足不同的管理需求。
通过环境测试以及改良后,巡检机器人工作性能更佳,能够适应复杂的地下空间、隧道等建设期和运营期,研究具有一定参考价值。
地下管道检测机器人设计论文

一、地下管道检测机器人发展现状按照行走机构的类型,可将管内作业机器人行走机构分为轮式、履带式、蠕动式等几类。
轮式行走机构图1(a)轮式行走机构轮式机构管内作业机器人的基本形式如图1(a)所示。
对此类机器人的研究相对较多。
机器人在管内的运动,有直进式的(即机器人在管内平动),也有螺旋运动式的(即机器人在管内一边向前运动,一边绕管道轴线转动);轮的布置有平面的,也有空间的。
一般认为,平面结构的机器人结构简单,动图1(b)自来水管道检测轮式机器人作灵活,但刚性、稳定性较差,而空间多轮支撑结构的机器人稳定性、刚性较好, 但对弯管和支岔管的通过性不佳。
图1(b)为英国的PEARPOINT有限公司开发的自来水管道检测轮式机器人,可在以φ135~375mm的管径内直线行走,行走速度为0~12m/min。
履带式行走机构图2(a)履带式行走机构图2(b)海水管道检测履带式机器人图2(a)是履带式行走机构的基本形式。
这种类型的管内机器人在油污、泥泞、障碍等恶劣条件下达能到良好的行走状态,但由于结构复杂,不易小型化,转向性能不如轮式载体等原因,此类机器人应用较少。
图2(b)是日本关西电力株式会社开发的适用于管径Φ288~388mm、管长100m的海水管道检查履带式机器人,该机器人通过沿径向分布的履带在水平管和垂直管内自主行走,移动速度为5m/min。
整个地下输气管道检测维修用移动机器人系统由三大部分组成:(1)履带式移动机器人。
机器人小车上装有CCD摄像机,并可根据需要加挂其它检测单元。
(2)圆盘式收放线装置。
移动机器人通过电缆进行控制,视觉等信号也通过该线缆传输到控制计算机。
(3)控制单元。
其主体为一台工业控制计算机,负责整个机器人系统的控制、显示及信息存储等工作。
操作人员通过界面完成所有操作。
控制单元与收放线装置安装在一个专门设计的手推车体上,便于移动。
蠕动式行走机构图3 蠕动式行走机构蠕动式行走机构如图3所示。
管道清洗机器人_毕业论文
摘要火炮在发射后会在身管内残留大量的物质,这些物质受高温、高压的与管壁黏贴非常牢固极不易清除,会导致身管内壁的腐蚀,进而影响炮的准确性、可靠性并影响身管的使用寿命。
这些残留物主要依靠人工和机械的方法清除,设备笨重、智能化程度低,士兵劳动强度大,效率低,且清不高,不能满足和适应现代化高科技战争的作战要求。
清洗机器人,该机器人与火炮身管构成一个柔性统,可实现清洗的智能化及管内状况的可视化,不仅极大地减轻士兵的劳动而且可以有效提高火炮身管的维护保养水平和寿命,对提高部队战斗力具的军事和经济效益,具有广阔的应用前景。
关键词:管道清洗机器人单片机自动控制AbstractDue to high temperature and pressure, the remaining substances in the bore after the gun is launched will adhere to the bore firmly and can't be removed easily, which will result in erosion of the bore and have an impact on the veracity and reliability of the gun launching as well as its operating life. These substances are removed with manual and mechanical cleaning mainly, which can't meet and accommodate with the campaign need of modernization high-tech wars because of unwieldy equipment, low intelligentization, over laboring intension of soldiers, low efficiency and cleaning extent.Robot and bore achieves in intelligentization of cleaning and visualization of inner bore, which not only greatly lessens laboring tension of soldiers, but advances maintenance level and operating life of bore as well. It is of bright future in expansive application and of great military and economic benefit in enhancing battle effectiveness of the army.Key words: bore cleaning; robot;single chip microcomputer;automationAbstract (II)第一章绪论 (1)1.1课题研究背景及关键技术 (1)1.1.1课题的研究背景 (1)1.1.2课题的关键技术 (2)1.2国内外管道机器人的研究现状和发展方向 (3)1.2.1管道机器人的研究现状 (3)1.2.2管道机器人的发展方向 (5)1.3课题的研究意义 (5)第二章炮管擦洗机器人总体方案设计 (7)2.1需求分析与设计思路 (7)2.2移动功能模块设计 (8)2.2.1运动方式分析与选择 (8)2.2.2自适应机构设计 (9)2.3擦洗功能模块设计 (11)2.3.1炮膛擦洗过程分析与研究 (11)2.3.2轴向往复式擦洗头设计 (11)2.4控制功能模块设计 (13)2.4.1主控制系统 (13)2.4.2传感器 (13)2.4.3驱动系统 (13)第三章管道清洗机器人详细设计 (15)3.1移动功能模块设计与分析 (15)3.1.1传动机构设计 (15)3.1.2连接件设计 (16)3.2擦洗功能模块的设计 (18)3.2.1旋转式清洗头设计 (18)3.3控制系统的设计 (18)3.3.1主控制芯片 (19)3.3.2 ATmega128介绍 (20)3.3.3电机控制技术 (21)3.4最小系统电路设计 (23)3.4.1时钟/复位模块设计 (23)3.4.2电源模块设计 (23)3.5人机接口电路设计 (24)3.5.1 LCD显示模块 (24)3.5.2键盘电路 (25)3.5.3蜂鸣器电路 (25)3.5.4串口通信模块 (26)3.6电机控制电路设计 (26)第四章系统软件设计 (28)4.1系统软件架构 (28)4.1.1 PWM调速程序设计 (28)结论 (31)5.1论文总结 (31)5.2工作展望 (31)参考文献 (32)附录 (34)第一章绪论1.1课题研究背景及关键技术1.1.1课题的研究背景现代国防工业日新月异,武器装备制造及维护的技术水平直接决定了国家的军事实力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、地下管道检测机器人发展现状按照行走机构的类型,可将管内作业机器人行走机构分为轮式、履带式、蠕动式等几类。
轮式行走机构图1(a)轮式行走机构轮式机构管内作业机器人的基本形式如图1(a)所示。
对此类机器人的研究相对较多。
机器人在管内的运动,有直进式的(即机器人在管内平动),也有螺旋运动式的(即机器人在管内一边向前运动,一边绕管道轴线转动);轮的布置有平面的,也有空间的。
一般认为,平面结构的机器人结构简单,动图1(b)自来水管道检测轮式机器人作灵活,但刚性、稳定性较差,而空间多轮支撑结构的机器人稳定性、刚性较好, 但对弯管和支岔管的通过性不佳。
图1(b)为英国的PEARPOINT有限公司开发的自来水管道检测轮式机器人,可在以φ135~375mm的管径内直线行走,行走速度为0~12m/min。
履带式行走机构图2(a)履带式行走机构图2(b)海水管道检测履带式机器人图2(a)是履带式行走机构的基本形式。
这种类型的管内机器人在油污、泥泞、障碍等恶劣条件下达能到良好的行走状态,但由于结构复杂,不易小型化,转向性能不如轮式载体等原因,此类机器人应用较少。
图2(b)是日本关西电力株式会社开发的适用于管径Φ288~388mm、管长100m的海水管道检查履带式机器人,该机器人通过沿径向分布的履带在水平管和垂直管内自主行走,移动速度为5m/min。
整个地下输气管道检测维修用移动机器人系统由三大部分组成:(1)履带式移动机器人。
机器人小车上装有CCD摄像机,并可根据需要加挂其它检测单元。
(2)圆盘式收放线装置。
移动机器人通过电缆进行控制,视觉等信号也通过该线缆传输到控制计算机。
(3)控制单元。
其主体为一台工业控制计算机,负责整个机器人系统的控制、显示及信息存储等工作。
操作人员通过界面完成所有操作。
控制单元与收放线装置安装在一个专门设计的手推车体上,便于移动。
蠕动式行走机构图3 蠕动式行走机构蠕动式行走机构如图3所示。
当头部支撑脚 3 收缩脱离与管道内壁接触,尾部支撑脚1伸出与管壁接触压紧,气缸2左缸供气, 蠕动载体伸长, 带动头部向前移动;当头部移动到位时,支撑脚1缩回,头部支撑脚3伸出与管壁接触压紧,气缸2右缸供气,则蠕动载体收缩,带动尾部向前运动。
尾部移动到位,尾部支撑脚1伸出,支撑管壁,头部支撑脚缩回。
蠕动式管内移动机器人支撑脚的伸缩和载体的蠕动均采用直线运动,当支撑脚支承载体与管壁压紧,不支承时可以与管壁脱离,解决了轮式和履带式管内移动机器人行走时驱动轮始终压紧在管壁上的问题,可以产生很大的牵引力。
但由于蠕动式移动机器人的运动是间歇的,受驱动件启动频率的限制,移动速度比轮式、履带式低。
轮式驱动机构具有结构简单,容易实现,行走效率高等优点,主要缺点是牵引力的提高受到封闭力的限制。
履带式载体附着性能好,越障能力强,并能输出较大的牵引力,但结构复杂,不易小型化,转向性能不如轮式载体。
二、课题目的及意义本项目是根据我国经济建设的实际需要而提出的一项亟待研究和解决的科研课题。
地下管道(输水管道、煤气管道、供气管道)在长期使用过程中,由于受到管内、管外介质的腐蚀等原因,会产生裂纹、漏孔而出现漏气、漏水现象,这不仅会造成巨大的经济损失,甚至会出现人身事故,为此迫切需要一种能在管内行走的机器人来拖动或输送各种装置完成检测和维修工作。
目前国外先进国家对地下管道的检测已开始采用管内移动机器人来完成,而国内主要采用废弃旧损管线、铺设新管线的方法,或人工入管修复,这不仅耗资巨大,修复周期过长,而且劳动强度大。
据我们在中国石油天然气总公司和国内各城市自来水公司、供热公司调研表明,国内现继续地下输气管道、输水管道检测用移动机器人。
因此开展地下输水输气管道检测用移动机器人的研究,对能源工业的发展及减少水资源浪费具有重大的理论意义和现实意义。
目前,国内外对涵管的检测主要采取人工观察测量、局部破损检测的办法。
所研制的管道机器人大部分也是针对工业管道和细小的管道。
由此,笔者尝试性地做了关于涵管检测机器人行走机构的初步探讨。
根据汽车理论,机器人若能在管道中正常行走,则必须满足下述条件,即tFF ϕ≤式中,tF ——————驱动力;F ϕ ——————为附着力,且F ϕ= 2Nϕ,为附着系数。
根据汽车理论,设计取ϕ=0.8,可得F ϕ =373.4 N 由以上计算可知行走条件满足。
5.3 机器人驱动方案和电机选择 按照汽车的驱动理论原则,管道机器人的驱动方式采用后轮驱动的方式,并且由于工作条件对小车尺寸的要求,采用减速器装置,使电机的告诉输出轴连接在减速器输入轴上,然后通过减速器减速,并且把减速器的输出轴通过套筒式联轴器与一对锥齿轮和小车的后轴相连接,从而带动车轮转动。
后轮轴的两端伸出部分安装上铸钢轮,为了附着性能,在铸钢轮的外面嵌入了橡胶圈,使机器人能可靠在管道里行走。
由0tqg Ttri i T Fη⋅⋅⋅=,0.377agr nui i ⋅=⋅其中, tqT——————电机转矩,单位N m ⋅g i ——————变速器传动比; 0i ——————主减速器传动比;r——————车轮半径,单位为m ; T ——————传动效率;N ——————发动机转速,单位为/m in r ;au ——————机器人行驶速度,单位为/km h 。
设计中初选100gi =,02i =,60r m m =,5/m inam u =;可得n=2273.6r/min , tqT =0.1116N m ⋅;选定电机的条件:tqT≤电机的额定转矩;n ≤电机的额定转速;J ≤电机的额定转动惯量。
由选定条件可初步选择BAYSIDE 公司的BM060型直流伺服电动机,其技术数据如表1所示,外形尺寸如表2所示。
5.4 减速器设计 车轮转矩:=0.50.53470.0610.41T F t r N m⋅⋅=⨯⨯=⋅轮5.6.1 齿轮选择选用支持圆锥齿轮传动,大小齿轮东选用硬齿面,材料均为40Cr ,并经调质及表面淬火,齿面硬度为48~50HRC 。
因采用表面淬火,齿轮的变形不大,不需磨削,故初选5级精度(GB10095-88)。
选小齿轮齿数117Z=,大齿轮齿数2134u ZZ==。
5.6.2 按齿根弯曲皮料强度设计 弯曲想读的设计公式为m≥式中, m ——————模数,单位mm;K ——————载荷系数;1T ——————小齿轮传递的扭矩,单位m m N ⋅;Rφ——————齿宽系数; F aY ——————齿形系数; S aY ——————应力校正系数;[]F σ——————许用弯曲疲劳强度,单位MPa.(1) 确定公式内的各计算数值 ①查得大小齿轮的弯曲疲劳强度极限:1F E σ=2F E σ=650M P a;②查得弯曲疲劳寿命系数 1F N K =2F N K=1.0;③计算弯曲疲劳许用应力取弯曲疲劳安全系数S =1.25,由公式[]F NF EFS Kσσ⋅=得[]111520F N F E F M P aSKσσ⋅==;[]222520F N F E F M P aSKσσ⋅==;④计算载荷系数K1.00 1.0 1.2 1.65 1.98AVF KKKKKαβ=⋅⋅⋅=⨯⨯⨯=;⑤取齿形系数12.85F a Y=;22.23F a Y=;⑥查取应力校正系数 11.54S a Y=;21.76S a Y=;⑦计算大、小齿轮的[]F aS aFYYσ⋅并加以比较[]1112.85 1.540.00844520F a S a F Y Yσ⋅⨯==;[]2222.23 1.760.00755520F a S a F YYσ⋅⨯==;小齿轮的数值大,应以小齿轮计算。
⑧小齿轮传递的转矩1=10410m m2N TT=⋅轮⑨齿宽系数 =1/3Rφ;⑵设计计算1.51m m m≥≈取模数2m mm=。
5.6.3 按齿面接触疲劳强度校核接触强度的校核公式为[]5EHHM P aZσσ=⋅⋅≤(1) 确定公式内的个计算数值 ①查得大小齿轮的接触疲劳强度极限 lim 1lim 2900H H M P aσσ==;②查得接触疲劳寿命系数 121.35; 1.35;H N H N K K==③计算解除疲劳许用应力 取接触疲劳安全系数 1s=,由公式[]limH NH HKSσσ⋅=得[]1lim 11975H N H H M P aK Sσσ⋅==[]2lim 221012.5H N H H M P aKSσσ⋅==取[]Hσ1012.5M P a=。
④载荷系数: 1.98K=; ⑤查取弹性影响系数18EZ=⑥计算小齿轮分度圆直径1d 1134m md mZ=⋅=;⑵校核计算5189.8907.3975HHM P a M P aσσ⎡⎤=⨯⨯=<=⎣⎦齿轮设计符合要求。
5.6.4 几何尺寸计算(1)计算分度圆直径1134m mdm Z=⋅=;2268m mdm Z=⋅=;⑵计算中心距()12/251m m add =+=;⑶计算锥距R38.013m mR===⑷计算齿轮宽度 12.671Rm mbR φ=⋅≈;圆整取 1210;12m m m mB B ==。
5.7 车轮轴及齿轮轴设计 5.7.1 车轮后轴设计 (1)最小直径的设计 车轮轴的转矩:3470.0620.82Ftr N mT=⋅=⨯=⋅车轮轴车轮轴的功率:T 20.82300020.8295509550200n N mP⋅⨯===⋅⨯车轮轴;选取轴的材料为40Cr ,许用扭转应力[]55TM P aτ=。
m in12.41m md==取14m md=。
(2) 车轮轴的结构设计,如图所示,详图请参考零件图。
图10 车轮轴的结构简图(3)轴承的选择根据结构选择角接触球轴承(GB292-83)。
①由于该轴既承受扭矩又承受弯矩,故按弯扭合成强度条件校核,并同时按疲劳强度条件进行精度校核。
步骤如下:轴的受力简图,如图所示。
图11 车轮轴的受力简图其中,12121000100020.82734.9128.33t m NT Fd⨯⨯==='2734.9120267.48tt g t g N FFα=⋅=⨯=。
'2222co s co s 267.48co s 63.43119.64r ttg N F F F αδδ=⋅=⋅⋅=⨯=。
'2222sin sin 267.48sin 63.43239.23a t tg NFFFαδδ=⋅=⋅⋅=⨯=。
'347173.522ttNFF===;10.41N mT =⋅轮;()112co s sin co s sin 11332.2822LLLna a hNLfGGGGFZ αααα+++==⋅=⋅2256.67239.236777.3822m a N mdMF=⋅=⨯=⋅图中其他各力数值如表所示。