CAN、USART、SPI、SCI等
单片机常用术语
单片机常用术语单片机(Microcontroller)是一种集成了微处理器、存储器和外设接口的单个集成电路芯片。
它广泛应用于电子设备中,用于控制和执行各种任务。
在单片机领域,有一些常用术语被广泛使用,下面将对这些术语进行介绍和解释。
1. GPIO(General Purpose Input/Output)GPIO是单片机中的通用输入输出引脚。
它可以通过软件编程来控制,既可以作为输入口用来读取外部信号,也可以作为输出口用来控制外部设备。
通过控制GPIO,可以实现单片机与外部世界的交互。
2. ADC(Analog to Digital Converter)ADC是模数转换器的英文缩写,用于将模拟信号转换为数字信号。
单片机一般配备有ADC模块,可以将外部的模拟量信号转换成相应的数字量,以供后续的数字处理和分析。
3. UART(Universal Asynchronous Receiver/Transmitter)UART是一种通用的异步串行通信接口。
它用于实现单片机和外部设备之间的数据传输。
UART通过将数据位、停止位和校验位按照一定的规则进行组织,以实现数据的可靠传输。
4. PWM(Pulse Width Modulation)PWM是一种脉冲宽度调制技术。
它通过改变信号的脉冲宽度来控制某个输出端口的电平。
PWM常用于控制电机的速度、LED的亮度等应用场景,可以通过调整占空比来实现精细的控制效果。
5. I2C(Inter-Integrated Circuit)I2C是一种串行通信总线协议,由Philips公司在上世纪80年代推出。
它通过两根线路(串行数据线SDA和串行时钟线SCL)来实现多个设备之间的通信。
I2C常用于连接单片机和传感器、存储器等外设。
6. SPI(Serial Peripheral Interface)SPI是一种串行的外设接口协议,用于在单片机和外部设备之间传输数据。
它使用多线全双工模式,包括一个主设备和一个或多个从设备。
常见硬件通信(SPI、I2C、CAN、USB、UART)协议介绍

常见硬件通信(SPI、I2C、CAN、USB、UART)协议介绍其中,CS是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。
这就使在同一条总线上连接多个SPI设备成为可能。
接下来就负责通讯的3根线了。
通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。
这就是SCLK时钟线存在的原因,由SCLK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。
数据输出通过SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。
完成一位数据传输,输入也使用同样原理。
因此,至少需要8次时钟信号的改变(上沿和下沿为一次),才能完成8位数据的传输。
SCLK信号线只由主设备控制,从设备不能控制信号线。
同样,在一个基于SPI的设备中,至少有一个主控设备。
这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCLK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。
也就是说,主设备通过对SCLK时钟线的控制可以完成对通讯的控制。
通过逻辑分析仪采集 spi 总线数据,可以看到四个通道的波形变化,判断信号的时钟周期、时钟相位和极性,并能够解码获取实际传输的数据和指令。
SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。
不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。
最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。
I2C协议I2C推荐文章:《IIC通信协议,搞懂这篇就够了》注:后台发送“IIC” 即可获取基于STM32上实现软件模拟IIC的完整代码。
spi,总线规范

竭诚为您提供优质文档/双击可除spi,总线规范篇一:常见总线简介can、usaRt、spi、sci等任何一个微处理器都要与一定数量的部件和外围设备连接,但如果将各部件和每一种外围设备都分别用一组线路与cpu直接连接,那么连线将会错综复杂,甚至难以实现。
为了简化硬件电路设计、简化系统结构,常用一组线路,配置以适当的接口电路,与各部件和外围设备连接,这组共用的连接线路被称为总线。
采用总线结构便于部件和设备的扩充,尤其制定了统一的总线标准则容易使不同设备间实现互连。
微机中总线一般有内部总线、系统总线和外部总线。
内部总线是微机内部各外围芯片与处理器之间的总线,用于芯片一级的互连;而系统总线是微机中各插件板与系统板之间的总线,用于插件板一级的互连;外部总线则是微机和外部设备之间的总线,微机作为一种设备,通过该总线和其他设备进行信息与数据交换,它用于设备一级的互连。
另外,从广义上说,计算机通信方式可以分为并行通信和串行通信,相应的通信总线被称为并行总线和串行总线。
并行通信速度快、实时性好,但由于占用的口线多,不适于小型化产品;而串行通信速率虽低,但在数据通信吞吐量不是很大的微处理电路中则显得更加简易、方便、灵活。
串行通信一般可分为异步模式和同步模式。
随着微电子技术和计算机技术的发展,总线技术也在不断地发展和完善,而使计算机总线技术种类繁多,各具特色。
下面仅对微机各类总线中目前比较流行的总线技术分别加以介绍。
一、内部总线1.i2c总线i2c(inter-ic)总线10多年前由philips公司推出,是近年来在微电子通信控制领域广泛采用的一种新型总线标准。
它是同步通信的一种特殊形式,具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,可以有多个i2c总线器件同时接到i2c总线上,通过地址来识别通信对象。
2.spi总线串行外围设备接口spi(serialperipheralinterface)总线技术是motorola公司推出的一种同步串行接口。
CAN、I2S、I2C、SPI、SSP总线简介
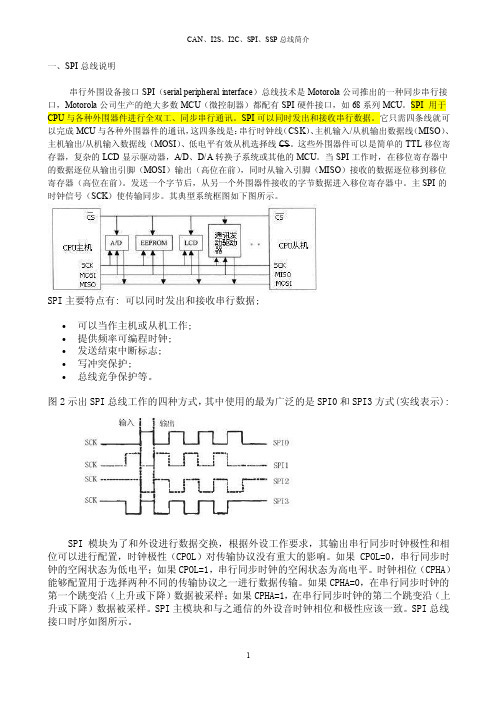
一、SPI总线说明串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口,Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI 用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI可以同时发出和接收串行数据。
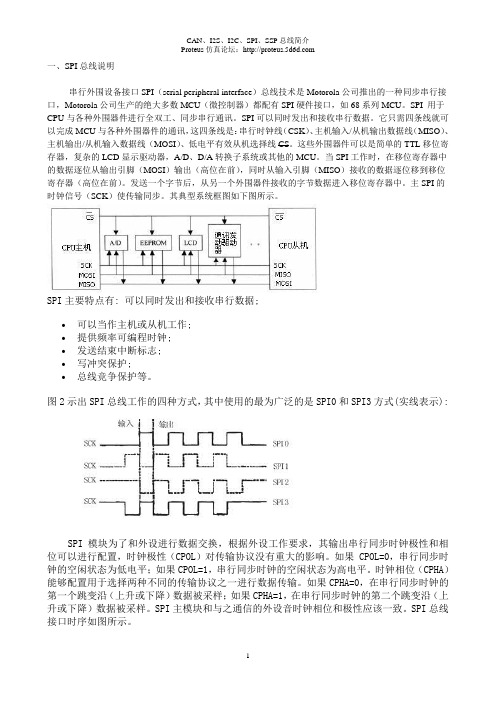
它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。
这些外围器件可以是简单的TTL移位寄存器,复杂的LCD显示驱动器,A/D、D/A转换子系统或其他的MCU。
当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。
发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。
主SPI的时钟信号(SCK)使传输同步。
其典型系统框图如下图所示。
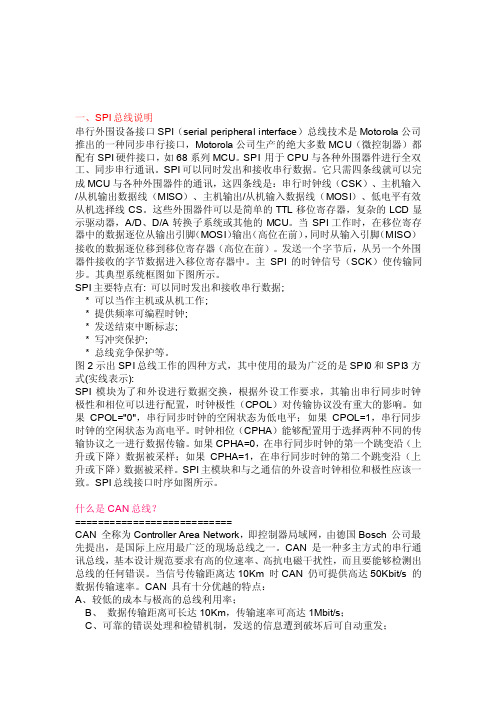
SPI主要特点有: 可以同时发出和接收串行数据;∙可以当作主机或从机工作;∙提供频率可编程时钟;∙发送结束中断标志;∙写冲突保护;∙总线竞争保护等。
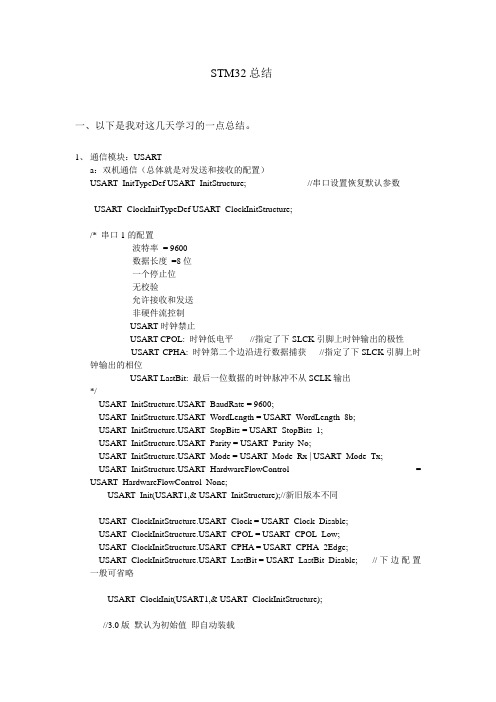
图2示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
I2C,SPI,UART和CAN的区别

I2C,SPI,UART和CAN的区别(转)SPI--Serial Peripheral Interface,(Serial Peripheral Interface:串行外设接口)串行外围设备接口,是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
I2C--INTER-IC(INTER IC BUS:意为IC之间总线)串行总线的缩写,是PHILIPS公司推出的芯片间串行传输总线。
它以1根串行数据线(SDA)和1根串行时钟线(SCL)实现了双工的同步数据传输。
具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
能用于替代标准的并行总线,能连接的各种集成电路和功能模块。
I2C是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。
总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。
多路微控制器能在同一个I2C总线上共存。
最主要的优点是其简单性和有效性。
它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器):单端,远距离传输。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
STM32定时器、usart、spi
STM32总结一、以下是我对这几天学习的一点总结。
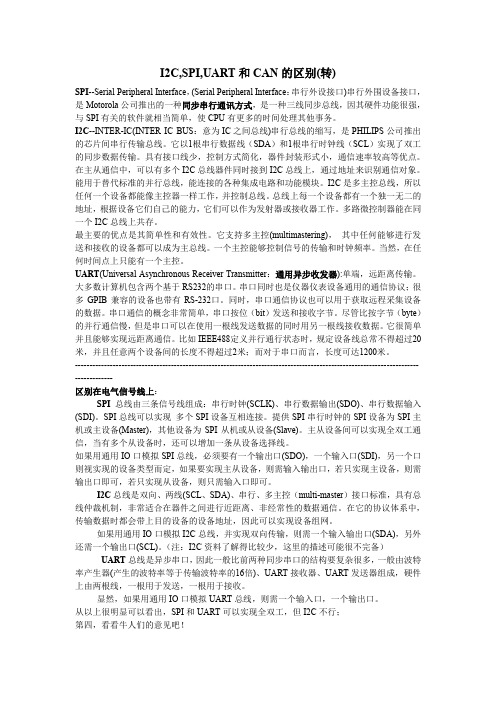
1、通信模块:USARTa:双机通信(总体就是对发送和接收的配置)USART_InitTypeDef USART_InitStructure; //串口设置恢复默认参数USART_ClockInitTypeDef USART_ClockInitStructure;/* 串口1的配置- 波特率= 9600- 数据长度=8位- 一个停止位- 无校验- 允许接收和发送- 非硬件流控制- USART时钟禁止- USART CPOL: 时钟低电平//指定了下SLCK引脚上时钟输出的极性- USART CPHA: 时钟第二个边沿进行数据捕获//指定了下SLCK引脚上时钟输出的相位- USART LastBit: 最后一位数据的时钟脉冲不从SCLK输出*/USART_ART_BaudRate = 9600;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_Init(USART1,& USART_InitStructure);//新旧版本不同USART_ART_Clock = USART_Clock_Disable;USART_ART_CPOL = USART_CPOL_Low;USART_ART_CPHA = USART_CPHA_2Edge;USART_ART_LastBit = USART_LastBit_Disable; //下边配置一般可省略USART_ClockInit(USART1,& USART_ClockInitStructure);//3.0版默认为初始值即自动装载USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);// 使能或者失能指定的USART中断// USART_ITConfig(USART1, USART_IT_TXE, ENABLE);//开启发送中断设置最好在此处不要用USART_Cmd(USART1, ENABLE); //使用串口1}对这段配置应注意新旧版本的不同,如 2.0版本只有USART_Init(USART1,& USART_InitStructure);而 3.0还包括了USART_ClockInit(USART1,& USART_ClockInitStructure);但两个配置的内容还是一样的只是换了种写法。
sci与spi的区别与联系

SPI与S CI--[360doc]1. SPI串行外围设备接口(se rialperip heral inte rface)总线技术是Moto rola公司推出的一种同步串行接口。
Mo torol a公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI总线是一种三线同步总线,因其硬件功能很强,所以,与S PI有关的软件就相当简单,使C PU有更多的时间处理其他事务。
2.SCI串行通信接口(seria l com munic ation inte rface)也是由M otoro la公司推出的。
它是一种通用异步通信接口UART,与MCS-51的异步通信功能基本相同。
说白一点一个是同步串行、一个是异步串行再白一点——同步的需要多出一条时钟线、异步的只需要接收、发送两条线SCI模块用于串行通讯,如RS422、RS485、RS232;S PI模块用于扩展外设,如AD、DA、FR AM、DS P等。
SCI模块和SPI模块是两个外设的扩展模块!SC I是异步通信SPI是同步通信sc i是异步串行通信接口,spi是同步,sp i分主从机,通信速率上spi高于sci------------------------------------------------------------------------------[百度知道]通常,大部分人把SCI、UART与RS232混为一谈,其实他们有本质上的差别:SC I(Ser ial C ommun icati on In terfa ce)意为“串行通信接口”,是相对于并行通信的,是串行通信技术的一种总称,最早由Motol ora公司提出的。
I2C,SPI,UART和CAN的区别
I2C,SPI,UART和CAN的区别(转)SPI--Serial Peripheral Interface,(Serial Peripheral Interface:串行外设接口)串行外围设备接口,是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
I2C--INTER-IC(INTER IC BUS:意为IC之间总线)串行总线的缩写,是PHILIPS公司推出的芯片间串行传输总线。
它以1根串行数据线(SDA)和1根串行时钟线(SCL)实现了双工的同步数据传输。
具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
能用于替代标准的并行总线,能连接的各种集成电路和功能模块。
I2C是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。
总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。
多路微控制器能在同一个I2C总线上共存。
最主要的优点是其简单性和有效性。
它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器):单端,远距离传输。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信的概念非常简单,串口按位(bit)发送和接收字节。
尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
SPI与SCI与I2C区别
1. SPI串行外围设备接口(serial peripheral interface)总线技术是Motorola 公司推出的一种同步串行接口。
Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI总线是一种三线同步总线,因其硬件功能很强,所以,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
2. SCI串行通信接口(serial communication interface)也是由Motorola公司推出的。
它是一种通用异步通信接口UART,与MCS-51的异步通信功能基本相同。
说白一点一个是同步串行、一个是异步串行再白一点——同步的需要多出一条时钟线、异步的只需要接收、发送两条线SCI模块用于串行通讯,如RS422、RS485、RS232;SPI模块用于扩展外设,如AD、DA、FRAM、DSP等。
SCI模块和SPI模块是两个外设的扩展模块!SCI是异步通信SPI是同步通信sci是异步串行通信接口,spi是同步,spi分主从机,通信速率上spi高于sciSPI总线由三条信号线组成:串行时钟(SCLK)、串行数据输出(SDO)、串行数据输入(SDI)。
SPI总线可以实现多个SPI设备互相连接。
sci是单片机的串口通信,spi是单片机的I2C通信一个是同步时钟,一个是异步时钟SCI是异步通信串口,只有两根线就可一完成通信。
SPI是同步通信串口,需要的线比SCI多。
SPI和I2C的区别I2C的数据输入输出用的是一根线,SPI则分为dataIN和dataOUT。
由于这个原因,采用I2C时CPU的端口占用少,SPI多一根。
但是由于I2C的数据线是双向的,所以隔离比较复杂,SPI则比较容易。
所以系统内部通信可用I2C,若要与外部通信则最好用SPI带隔离(可以提高抗干扰能力)。
但是I2C和SPI都不适合长距离传输。
长距离时就要用485了。
区别:SPI:高速同步串行口。
spi、can等总线的区别
一、SPI总线说明串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口,Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI 用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI可以同时发出和接收串行数据。
它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。
这些外围器件可以是简单的TTL移位寄存器,复杂的LCD显示驱动器,A/D、D/A转换子系统或其他的MCU。
当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。
发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。
主SPI的时钟信号(SCK)使传输同步。
其典型系统框图如下图所示。
SPI主要特点有: 可以同时发出和接收串行数据;* 可以当作主机或从机工作;* 提供频率可编程时钟;* 发送结束中断标志;* 写冲突保护;* 总线竞争保护等。
图2示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL="0",串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
嵌入式总线协议分类
嵌入式总线协议分类
嵌入式总线协议可以分为以下几类:
1. 并行总线协议:并行总线协议是指数据传输时使用多个电路并行传送。
常见的并行总线协议有PCI、ISA、VME等。
2. 串行总线协议:串行总线协议是指数据按照位的顺序依次传输的总线协议。
常见的串行总线协议有USB、Ethernet、CAN、I2C、SPI等。
3. 控制总线协议:控制总线协议是用于连接主控制器和外围设备之间的通信。
常见的控制总线协议有I2C、SPI、USART等。
4. 存储总线协议:存储总线协议是用于处理存储设备与计算机之间的通信。
常见的存储总线协议有ATA、SATA、SCSI、
SD等。
5. 数据总线协议:数据总线协议用于在计算机内部不同模块之间传输数据。
常见的数据总线协议有PCI、AMBA等。
需要注意的是,上述分类并不是完全独立的,有些协议可能同时具备多种特性,例如USB既可作为串行总线协议,也可以
作为控制总线协议使用。
嵌入式系统设计时需要选择合适的总线协议,根据具体应用需求来进行选择和设计。
单片机中常见的接口类型及其功能介绍
单片机中常见的接口类型及其功能介绍单片机(microcontroller)是一种集成了中央处理器、内存和各种外围接口的微型计算机系统。
它通常用于嵌入式系统中,用于控制和监控各种设备。
接口是单片机与外部设备之间进行数据和信号传输的通道。
本文就单片机中常见的接口类型及其功能进行介绍。
一、串行接口1. 串行通信口(USART):USART是单片机与外部设备之间进行串行数据通信的接口。
它可以实现异步或同步传输,常用于与计算机、模块、传感器等设备进行数据交换。
2. SPI(串行外围接口):SPI接口是一种全双工、同步的串行数据接口,通常用于连接单片机与存储器、传感器以及其他外围设备。
SPI接口具有较高的传输速度和灵活性,可以实现多主多从的数据通信。
3. I2C(Inter-Integrated Circuit):I2C接口是一种面向外部设备的串行通信总线,用于连接不同的芯片或模块。
I2C接口通过两条双向线路进行数据传输,可以实现多主多从的通信方式,并且占用的引脚较少。
二、并行接口1. GPIO(通用输入/输出):GPIO接口是单片机中最常见的接口之一,用于连接与单片机进行输入输出的外围设备。
通过设置相应的寄存器和引脚状态,可以实现单片机对外部设备进行控制和监测。
2. ADC(模数转换器):ADC接口用于将模拟信号转换为数字信号,常用于单片机中对模拟信号的采集和处理。
通过ADC接口,单片机可以将外部传感器等模拟信号转化为数字信号,便于处理和分析。
3. DAC(数模转换器):DAC接口用于将数字信号转换为模拟信号。
通过DAC接口,单片机可以控制外部设备的模拟量输出,如音频输出、电压控制等。
三、特殊接口1. PWM(脉冲宽度调制):PWM接口用于产生特定占空比的脉冲信号。
通过调节脉冲的宽度和周期,可以控制外部设备的电平、亮度、速度等。
PWM接口常用于控制电机、LED灯、舵机等设备。
2. I2S(串行音频接口):I2S接口用于在单片机和音频设备之间进行数字音频数据传输。
SCI,SPI,UART三种串行总线协议的区别
SCI,SPI,UART三种串行总线协议的区别SCI (串行通讯接口)模块对其进行控制。
(注:SCI 首先由Motorola 微串口微控制器而得名,SCI 另一种说法是UART 控制器)常用的许多芯片中都包含了SCI ,例如ARM 的S3C2410X 芯片内嵌了3 个串行接口控制器,而Nios等软核芯片则可以用选用UART(RS232) 的IP 对UART 进行控制。
PC 机则常用16650 UART,16750 UART 等控制串口。
--这样说来SCI 只不过属于UART里面比较特殊的一种串行通讯方式了。
确实也只是在飞思卡尔芯片上遇见过。
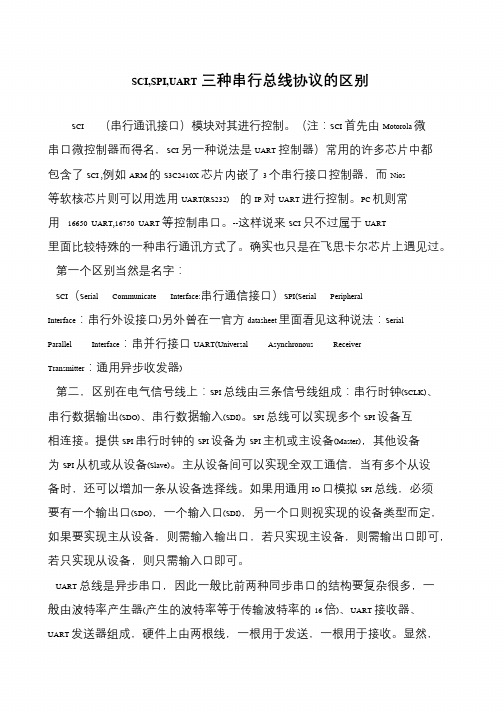
第一个区别当然是名字:SCI(Serial Communicate Interface:串行通信接口)SPI(Serial Peripheral Interface:串行外设接口)另外曾在一官方datasheet 里面看见这种说法:Serial Parallel Interface:串并行接口UART(Universal Asynchronous Receiver Transmitter:通用异步收发器)第二,区别在电气信号线上:SPI 总线由三条信号线组成:串行时钟(SCLK)、串行数据输出(SDO)、串行数据输入(SDI)。
SPI 总线可以实现多个SPI 设备互相连接。
提供SPI 串行时钟的SPI 设备为SPI 主机或主设备(Master),其他设备为SPI 从机或从设备(Slave)。
主从设备间可以实现全双工通信,当有多个从设备时,还可以增加一条从设备选择线。
如果用通用IO 口模拟SPI 总线,必须要有一个输出口(SDO),一个输入口(SDI),另一个口则视实现的设备类型而定,如果要实现主从设备,则需输入输出口,若只实现主设备,则需输出口即可,若只实现从设备,则只需输入口即可。
UART 总线是异步串口,因此一般比前两种同步串口的结构要复杂很多,一般由波特率产生器(产生的波特率等于传输波特率的16 倍)、UART 接收器、UART 发送器组成,硬件上由两根线,一根用于发送,一根用于接收。
Usart&SPI
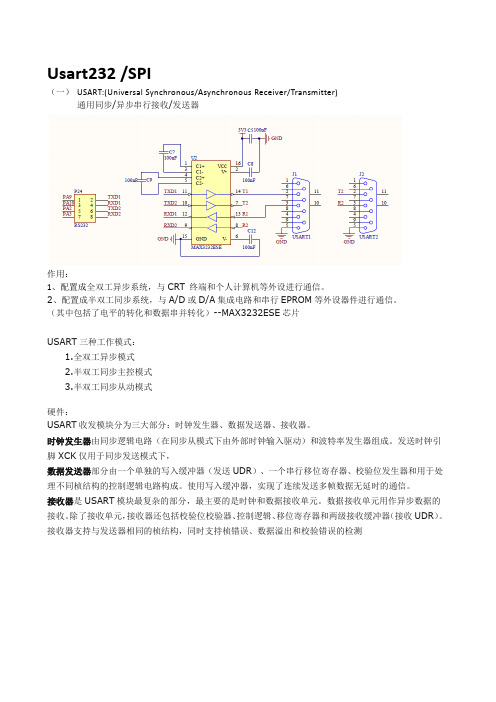
Usart232 /SPI(一)USART:(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步串行接收/发送器作用:1、配置成全双工异步系统,与CRT 终端和个人计算机等外设进行通信。
2、配置成半双工同步系统,与A/D或D/A集成电路和串行EPROM等外设器件进行通信。
(其中包括了电平的转化和数据串并转化)--MAX3232ESE芯片USART三种工作模式:1.全双工异步模式2.半双工同步主控模式3.半双工同步从动模式硬件:USART收发模块分为三大部分:时钟发生器、数据发送器、接收器。
时钟发生器由同步逻辑电路(在同步从模式下由外部时钟输入驱动)和波特率发生器组成。
发送时钟引脚XCK仅用于同步发送模式下,数据发送器部分由一个单独的写入缓冲器(发送UDR)、一个串行移位寄存器、校验位发生器和用于处理不同桢结构的控制逻辑电路构成。
使用写入缓冲器,实现了连续发送多帧数据无延时的通信。
接收器是USART模块最复杂的部分,最主要的是时钟和数据接收单元。
数据接收单元用作异步数据的接收。
除了接收单元,接收器还包括校验位校验器、控制逻辑、移位寄存器和两级接收缓冲器(接收UDR)。
接收器支持与发送器相同的桢结构,同时支持桢错误、数据溢出和校验错误的检测编程过程:1、首先导入头文件GPIO,USART,RCC2、系统初始化(系统时间频率):SystemInit();3、USART初始化:USART1_Config();(1)USART1和GPIO的时钟设置RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);(2) GPIO的设置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);(初始化两个端口PA9和PA10)(3)USART1的设置USART_ART_BaudRate = 115200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No ;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);USART_Cmd(USART1, ENABLE);4、如果想要向PC的超级终端输出信息,有两种方法实现(1)printf函数这需要对printf函数进行重定向,即定向到串口USART1,所需函数fputc这个函数里的关键句USART_SendData(USART1, (unsigned char) ch);它实现了将printf的信息发送到串口TXE:(2)USART1_printf函数实现过程看代码SPI:Serial Peripheral Interface串行外设接口(标准)左边是主器件,右边是有从器件。
电子硬件工程师需要具备的知识

电子硬件工程师需要具备的知识电子硬件工程师需要具备的知识随着科技的发展,电子产品的应用日益广泛,电子硬件工程师成为了一个非常重要的职业。
电子硬件工程师需要具备丰富的知识和技能,才能设计出高质量的电路板和电子产品。
本文将介绍电子硬件工程师需要具备的知识。
一、电路基础知识电路是电子硬件工程师日常工作的重中之重。
因此,电子硬件工程师需要熟悉电路基础知识,比如电位器、电容、电感、二极管、三极管、集成电路等元器件的基本原理和特性,能够设计各种类型的电路图。
除此之外,电子硬件工程师还需要熟悉电路实验、数字电路、模拟电路等相关知识。
二、硬件设计电子硬件工程师需要具备硬件设计能力,包括电路板设计、电源设计、仿真与测试等。
电路板设计需要掌握电路板设计软件,如Altium、Eagle等,了解PCB板的制造流程和工艺。
电源设计需要掌握各种电源电路设计原理、自制电源板的方法与技巧,能够根据需要设计各种特殊功能的电源;仿真和测试需要掌握相关软件工具,如Multisim、Proteus、Orcad等软件,能够基于仿真结果进行检验与调整电路。
三、嵌入式嵌入式是近年来快速发展的领域。
电子硬件工程师需要具备嵌入式方面的知识,能够按照需求开发软件与硬件接口。
嵌入式开发需要了解C语言、C++、Python等编程语言,了解Linux 和RTOS等操作系统的特点,掌握现成通讯接口和标准协议等。
例如,USB、I2C、SPI、USART、CAN等接口和协议以及基本的微处理器和微控制器,如AVR、ARM等。
四、通信网络随着互联网的普及和应用的广泛,电子硬件工程师需要了解通信网络方面的知识,包括网络协议、互联网络设备以及通信线路的选型与设置。
掌握Wi-Fi、4G/5G、蓝牙、ZigBee等协议和相关技术,了解LoRa、NB-IoT等新兴低功耗通信技术。
五、数字信号处理数字信号处理技术是处理数字信号的方法和技术,广泛应用于音频和视频信号的处理、传输和存储。
异步接收器传输总线(UART)、串行通信接口(SCI)和通用串行总线

异步接收器传输总线(UART)、串行通信接口(SCI)和通用串行总线异步接收器传输总线(UART)、串行通信接口(SCI)和通用串行总线(USB)等,这些总线在速度、物理接口要求和通信方法学上都有所不同。
本文详细介绍了嵌入式系统设计的串行总线、驱动器和物理接口的特性,并为总线最优选择提供性能比较和选择建议。
由于在消费类电子产品、计算机外设、汽车和工业应用中增加了嵌入式功能,对低成本、高速和高可靠通信介质的要求也不断增长以满足这些应用,其结果是越来越多的处理器和控制器用不同类型的总线集成在一起,实现与PC软件、开发系统(如仿真器)或网络中的其它设备进行通信。
目前流行的通信一般采用串行或并行模式,而串行模式应用更广泛。
微处理器中常用的集成串行总线是通用异步接收器传输总线、串行通信接口、同步外设接口(SPI)、内部集成电路(I2C)和通用串行总线,以及车用串行总线,包括控制器区域网(CAN)和本地互连网(LIN)。
这些总线在速度、物理接口要求和通信方法学上都有所不同。
本文将对嵌入式系统设计的串行总线、驱动器和物理接口这些要求提供一个总体介绍,为选择最优总线提供指导并给出一个比较图表(表1)。
为了说明方便起见,本文的阐述是基于微处理器的设计。
串行与并行相比串行相比于并行的主要优点是要求的线数较少。
例如,用在汽车工业中的LIN串行总线只需要一根线来与从属器件进行通信,Dallas公司的1-Wire总线只使用一根线来输送信号和电源。
较少的线意味着所需要的控制器引脚较少。
集成在一个微控制器中的并行总线一般需要8条或更多的线,线数的多少取决于设计中地址和数据的宽度,所以集成一个并行总线的芯片至少需要8个引脚来与外部器件接口,这增加了芯片的总体尺寸。
相反地,使用串行总线可以将同样的芯片集成在一个较小的封装中。
另外,在PCB板设计中并行总线需要更多的线来与其它外设接口,使PCB 板面积更大、更复杂,从而增加了硬件成本。
can、i2s、i2c、spi、ssp总线简介【优质】
一、SPI总线说明串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口,Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI 用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI可以同时发出和接收串行数据。
它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。
这些外围器件可以是简单的TTL移位寄存器,复杂的LCD显示驱动器,A/D、D/A转换子系统或其他的MCU。
当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。
发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。
主SPI的时钟信号(SCK)使传输同步。
其典型系统框图如下图所示。
SPI主要特点有: 可以同时发出和接收串行数据;∙可以当作主机或从机工作;∙提供频率可编程时钟;∙发送结束中断标志;∙写冲突保护;∙总线竞争保护等。
图2示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
spi、can等总线的区别
一、SPI总线说明串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola公司推出的一种同步串行接口,Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI 用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI可以同时发出和接收串行数据。
它只需四条线就可以完成MCU与各种外围器件的通讯,这四条线是:串行时钟线(CSK)、主机输入/从机输出数据线(MISO)、主机输出/从机输入数据线(MOSI)、低电平有效从机选择线CS。
这些外围器件可以是简单的TTL移位寄存器,复杂的LCD显示驱动器,A/D、D/A转换子系统或其他的MCU。
当SPI工作时,在移位寄存器中的数据逐位从输出引脚(MOSI)输出(高位在前),同时从输入引脚(MISO)接收的数据逐位移到移位寄存器(高位在前)。
发送一个字节后,从另一个外围器件接收的字节数据进入移位寄存器中。
主SPI的时钟信号(SCK)使传输同步。
其典型系统框图如下图所示。
SPI主要特点有: 可以同时发出和接收串行数据;* 可以当作主机或从机工作;* 提供频率可编程时钟;* 发送结束中断标志;* 写冲突保护;* 总线竞争保护等。
图2示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL="0",串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
任何一个微处理器都要与一定数量的部件和外围设备连接,但如果将各部件
和每一种外围设备都分别用一组线路与CPU直接连接,那么连线将会错综复杂,
甚至难以实现。
为了简化硬件电路设计、简化系统结构,常用一组线路,配置以适当的接口电路,与各部件和外围设备连接,这组共用的连接线路被称为总线。
采用总线结构便于部件和设备的扩充,尤其制定了统一的总线标准则容易使不同设备间实现互连。
微机中总线一般有内部总线、系统总线和外部总线。
内部总线是微机内部各外围芯片与处理器之间的总线,用于芯片一级的互连;而系统总线是微机中各插件板与系统板之间的总线,用于插件板一级的互连;外部总线则是微机和外部设备之间的总线,微机作为一种设备,通过该总线和其他设备进行信息与数据交换,它用于设备一级的互连。
另外,从广义上说,计算机通信方式可以分为并行通信和串行通信,相应的通信总线被称为并行总线和串行总线。
并行通信速度快、实时性好,但由于占用的口线多,不适于小型化产品;而串行通信速率虽低,但在数据通信吞吐量不是很大的微处理电路中则显得更加简易、方便、灵活。
串行通信一般可分为异步模式和同步模式。
随着微电子技术和计算机技术的发展,总线技术也在不断地发展和完善,而使计算机总线技术种类繁多,各具特色。
下面仅对微机各类总线中目前比较流行的总线技术分别加以介绍。
一、内部总线
1.I2C总线
I2C(Inter-IC)总线10多年前由Philips公司推出,是近年来在微电子通信
控制领域广泛采用的一种新型总线标准。
它是同步通信的一种特殊形式,具有接口线少,控制方式简化,器件封装形式小,通信速率较高等优点。
在主从通信中,
可以有多个I2C总线器件同时接到I2C总线上,通过地址来识别通信对象。
2.SPI总线
串行外围设备接口SPI(serial peripheral interface)总线技术是Motorola 公司推出的一种同步串行接口。
Motorola公司生产的绝大多数MCU(微控制器)都配有SPI硬件接口,如68系列MCU。
SPI总线是一种三线同步总线,因其硬件功能很强,所以,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。
3.SCI总线
串行通信接口SCI(serial communication interface)也是由Motorola
公司推出的。
它是一种通用异步通信接口UART,与MCS-51的异步通信功能基本相同。
4.CAN总线属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。
较之目前许多RS-485基于R线构建的分布式控制系统而言, 基于CAN总线的分布式控制系统在以下方面具有明显的优越性。
只有2根线与外部相连,并且内部集成了
错误探测和管理模块。
二、系统总线
1.ISA总线
ISA(industrial standard architecture)总线标准是IBM 公司1984年为推出PC/AT机而建立的系统总线标准,所以也叫AT总线。
它是对XT总线的扩展,以适应8/16位数据总线要求。
它在80286至80486时代应用非常广泛,以至于现在奔腾机中还保留有ISA总线插槽。
ISA总线有98只引脚。
2.EISA总线
EISA总线是1988年由Compaq等9家公司联合推出的总线标准。
它是在ISA总线的基础上使用双层插座,在原来ISA总线的98条信号线上又增加了98条信号线,也就是在两条ISA信号线之间添加一条EISA信号线。
在实用中,EISA 总线完全兼容ISA总线信号。
3.VESA总线
VESA(video electronics standard association)总线是1992年由60家附件卡制造商联合推出的一种局部总线,简称为VL(VESA local bus)总线。
它的推出为微机系统总线体系结构的革新奠定了基础。
该总线系统考虑到CPU与主存和Cache 的直接相连,通常把这部分总线称为CPU总线或主总线,其他设备通过VL总线与CPU总线相连,所以VL总线被称为局部总线。
它定义了32位数据线,且可通过扩展槽扩展到64 位,使用33MHz时钟频率,最大传输率
达132MB/s,可与CPU同步工作。
是一种高速、高效的局部总线,可支持386SX、386DX、486SX、486DX及奔腾微处理器。
4.PCI总线
PCI(peripheral component interconnect)总线是当前最流行的总线之一,它是由Intel公司推出的一种局部总线。
它定义了32位数据总线,且可扩展为64位。
PCI总线主板插槽的体积比原ISA总线插槽还小,其功能比VESA、ISA 有极大的改善,支持突发读写操作,最大传输速率可达132MB/s,可同时支持多组外围设备。
PCI局部总线不能兼容现有的ISA、EISA、MCA(micro channel architecture)总线,但它不受制于处理器,是基于奔腾等新一代微处理器而发展的总线。
5.Compact PCI
以上所列举的几种系统总线一般都用于商用PC机中,在计算机系统总线中,还有另一大类为适应工业现场环境而设计的系统总线,比如STD总线、VME 总线、PC/104总线等。
这里仅介绍当前工业计算机的热门总线之一——Compact PCI。
Compact PCI的意思是“坚实的PCI”,是当今第一个采用无源总线底板结构的PCI系统,是PCI总线的电气和软件标准加欧式卡的工业组装标准,是当今最新的一种工业计算机标准。
Compact PCI是在原来PCI总线基础上改造而来,它利用PCI的优点,提供满足工业环境应用要求的高性能核心系统,同时还考虑充分利用传统的总线产品,如ISA、STD、VME或PC/104来扩充系统的I/O和其他功能。
三、外部总线
1.RS-232-C总线
RS-232-C是美国电子工业协会EIA(Electronic Industry Association)制定的一种串行物理接口标准。
RS是英文“推荐标准”的缩写,232为标识号,C表示修改次数。
RS-232-C总线标准设有25条信号线,包括一个主通道和一个辅助通道,在多数情况下主要使用主通道,对于一般双工通信,仅需几条信号线就可实现,如一条发送线、一条接收线及一条地线。
RS-232-C标准规定的数据传输速率为每秒50、75、100、150、300、600、1200、2400、4800、9600、19200波特。
RS-232-C标准规定,驱动器允许有2500pF的电容负载,通信距离将受此电容限制,例如,采用150pF/m的通信电缆时,最大通信距离为15m;若每米电缆的电容量减小,通信距离可以增加。
传输距离短的另一原因是RS-232属单端信号传送,存在共地噪声和不能抑制共模干扰等问题,因此一般用于20m 以内的通信。
2.RS-485总线
在要求通信距离为几十米到上千米时,广泛采用RS-485 串行总线标准。
RS-485采用平衡发送和差分接收,因此具有抑制共模干扰的能力。
加上总线收发器具有高灵敏度,能检测低至200mV的电压,故传输信号能在千米以外得到恢复。
RS-485采用半双工工作方式,任何时候只能有一点处于发送状态,因此,发送电路须由使能信号加以控制。
RS-485用于多点互连时非常方便,可以省掉许多信号线。
应用RS-485 可以联网构成分布式系统,其允许最多并联32台驱动器和32台接收器。
3.IEEE-488总线
上述两种外部总线是串行总线,而IEEE-488 总线是并行总线接口标准。
IEEE-488总线用来连接系统,如微计算机、数字电压表、数码显示器等设备及其他仪器仪表均可用IEEE-488总线装配起来。
它按照位并行、字节串行双向异
步方式传输信号,连接方式为总线方式,仪器设备直接并联于总线上而不需中介单元,但总线上最多可连接15台设备。
最大传输距离为20米,信号传输速度一般为500KB/s,最大传输速度为1MB/s。
4.USB总线
通用串行总线USB(universal serial bus)是由Intel、Compaq、Digital、IBM、Microsoft、NEC、Northern Telecom等7家世界著名的计算机和通信公司共同推出的一种新型接口标准。
它基于通用连接技术,实现外设的简单快速连接,达到方便用户、降低成本、扩展PC连接外设范围的目的。
它可以为外设提供电源,而不像普通的使用串、并口的设备需要单独的供电系统。
另外,快速是USB技术的突出特点之一,USB的最高传输率可达12Mbps比串口快100倍,比并口快近10倍,而且USB还能支持多媒体。