GPS模块对比测试2011-2-25-5
教你辨别GstarGPS模块性能

教你辨别GstarGPS模块性能Gstar GPS模块性能指标主要有接收灵敏度、定位时间、位置精度、功耗、时间精度等。
不同的GstarGPS模块有一定的性能差异,在各项参数上都有差别,所以选择一款性能好的GstarGPS模块,需要根据GstarGPS模块性能指标来看。
模块开机定位时间在不同的启动模式下有很大不同。
一般来说,冷启动时间是指模块内部没有保存任何有助于定位的数据的情况,包括星历、时间等,一般标称在1分钟以内;温启动时间是指模块内部有较新的卫星星历(一般不超过2小时),但时间偏差很大,一般标称在45秒以内;热启动时间是指关机不超过二十分钟,并且RTC时间误差很小时的情况。
一般标称在10秒以内;重新捕捉时间就如同汽车钻过了一个隧道,出隧道时重新捕捉卫星。
一般标称在4秒以内。
如果GstarGPS模块在定位后放的时间很久,或模块在定位后运输到几百公里以外的地方,这样模块内部有星历,但是这个星历是错误的或不具有参考意义的。
在这些情况下,定位时间可能要几分钟甚至更久的时间。
所以一般GstarGPS模块出厂时要将模块内部的星历等数据清掉,这样客户拿到模块后可以冷启动方式快速定位。
定位精度可在静态与动态情况下进行考察,且动态定位效果优于静态定位。
GstarGPS 模块所标称的定位参数是指在完全开放的天空下,卫星信号优良的情况下测得。
所以在常规的测试中很难达到标称的定位时间与定位精度。
常见的水平定位精度描述方式有两种:一是CEP,即圆概率误差,意指测出的点有50%的概率位于一个以真实坐标为圆心,以m为半径的圆内;二是DRMS,即二维均方根误差,意指测出的点有约95.5%的概率位于一个以真实坐标为圆心,以m为半径的圆内。
GstarGPS模块的定位精度取决于很多方面,比如来自于GPS系统的卫星钟差及轨道差、可见GstarGPS卫星数量及几何分布、太阳辐射、大气层、多径效应等。
另外,同一个GstarGPS 模块,还会因为天线及馈线质量、天线位置和方向、测试时间段、开放天空范围及方向、天气、PCB设计等原因产生不同的定位误差。
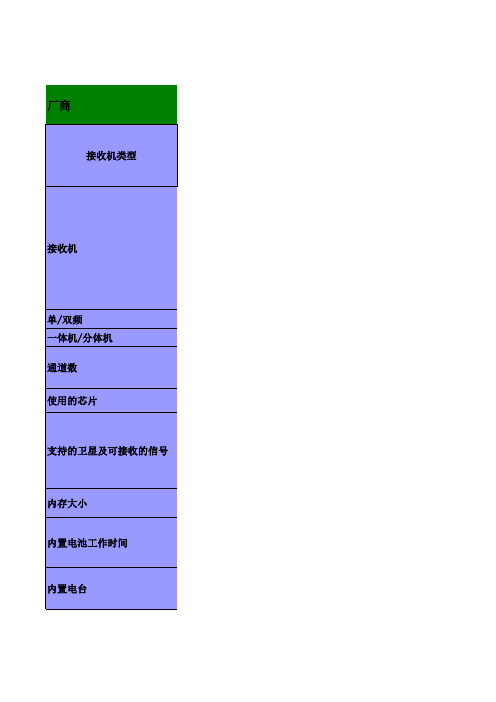
GPS接收机对比表
内部电池 5.5小时,时间随温度变化
接收
接收
<10s(一般情况下)
单/多基站最短时间10s+0.5×基线长 度,以km为单位,最长30km
CMR+、RTCM2.1 、RTCM2.3、 CMRⅡ、CMR+、RTCM2.1 、RTCM2.3、 RTCM3.0、RTCM3.1输入和输出; RTCM3.0、输入和输出;14NMEA输出, 16NMEA输出,GSOF和RT17输出 GSOF和RT17输出
厂商
接收机类型
接收机
单/双频 一体机/分体机 通道数 使用的芯片 支持的卫星及可接收的信号 内存大小 内置电池工作时间 内置电台
初始化时间 差分数据格式 通讯接口 蓝牙有无 重量 尺寸 防水/防尘 撞击 标配(使用的控制器) 与控制器相对应的软件及软 件版本要求
控制器
精度
再注:红色字符表示部分为 付费选项。
Trimble GPS
5700Ⅱ
5800Ⅱ
双频 分体
24通道
双频 分体
24通道
GPS: L1单频C/A码,L1/L2全周载 GPS: L1 C/A码,L1/L2全周载波。支持 波。支持SBAS WAAS/EGNOS。 WAAS/EGNOS。
256MB CF存储卡(最高可升级到 2G)
2MB
10小时后处理;6-8小时RTK(用 两个2.4Ah电池)
1.31kg(带内部电池、内部无线电、标 准甚高频天线)。3.57kg(整个RTK流动 站,包括电池、测杆、ACU控制器和托 座)
13.5cm×8.5cm×24cm
19cm宽×10cm高(包括接头)
IP67防尘,短时浸入水下1m不损 坏
IP67防尘,短时浸入水下1m不损坏
GPS测试知识介绍

NEMA-0813
• $GPGGA,031249.000,3110.6697,N,12124.7333,E,1,10,0.9,49.4,M,8.0,M,,0000*55 • $GPGSA,A,3,21,22,12,14,24,09,15,05,30,18,,,1.8,0.9,1.5*37 • $GPRMC,031249.000,A,3110.6697,N,12124.7333,E,0.09,135.21,230608,,,A*6C • $GPGGA,031250.000,3110.6698,N,12124.7333,E,1,10,0.9,48.5,M,8.0,M,,0000*52 • $GPGSA,A,3,21,22,12,14,24,09,15,05,30,18,,,1.8,0.9,1.5*37 • $GPRMC,031250.000,A,3110.6698,N,12124.7333,E,0.11,104.96,230608,,,A*6C • $GPGGA,031251.000,3110.6698,N,12124.7334,E,1,10,0.9,47.6,M,8.0,M,,0000*58 • $GPGSA,A,3,21,22,12,14,24,09,15,05,30,18,,,1.8,0.9,1.5*37 • $GPGSV,3,1,11,18,84,030,35,09,58,035,42,22,45,319,41,12,36,125,37*74 • $GPGSV,3,2,11,05,36,147,37,21,33,209,39,14,25,289,21,30,21,168,34*76 • $GPGSV,3,3,11,15,17,074,34,24,08,175,24,26,03,078,15*48 • $GPRMC,031251.000,A,3110.6698,N,12124.7334,E,0.11,107.31,230608,,,A*64 • $GPGGA,031252.000,3110.6699,N,12124.7334,E,1,10,0.9,46.8,M,8.0,M,,0000*55 • $GPGSA,A,3,21,22,12,14,24,09,15,05,30,18,,,1.8,0.9,1.5*37 • $GPRMC,031252.000,A,3110.6699,N,12124.7334,E,0.12,116.84,230608,,,A*6B • $GPGGA,031253.000,3110.6700,N,12124.7335,E,1,09,1.1,46.1,M,8.0,M,,0000*5C • $GPGSA,A,3,21,22,12,24,09,15,05,30,18,,,,2.1,1.1,1.7*33 • $GPRMC,031253.000,A,3110.6700,N,12124.7335,E,0.10,125.55,230608,,,A*64 • $GPGGA,031254.000,3110.6700,N,12124.7335,E,1,09,1.1,45.5,M,8.0,M,,0000*5C
GPS测试方案范文
GPS测试方案范文一、引言在现代生活中,全球定位系统(GPS)在诸多领域得到了广泛的应用。
为了确保GPS设备的准确性和可靠性,需要进行各种测试和验证。
本文将介绍一种GPS测试方案,以确保GPS设备的性能符合要求。
二、测试目标1.确保GPS设备可以从卫星接收器接收到足够的卫星信号。
2.确保GPS设备可以正确解码和处理接收到的卫星信号。
3.确保GPS设备可以准确计算和显示位置坐标。
4.确保GPS设备的时间同步准确。
三、测试步骤1.卫星信号测试为了确保GPS设备能够接收到足够的卫星信号,需要进行卫星信号测试。
可以在不同地点进行测试,例如室内、室外和高楼大厦等环境下。
测试人员可使用不同的GPS设备,测量接收到的卫星信号强度和数量。
测试结果应满足设备的最低接收要求。
2.定位准确性测试为了确保GPS设备的定位准确性,可以进行以下测试:a)静态测试:在固定的位置上放置GPS设备,记录并比较设备显示的位置坐标与实际位置的差距。
b)动态测试:在移动状态下进行测试,使用已知位置的参考点来验证设备的准确性。
c)多设备测试:使用多个GPS设备进行测试,比较它们的结果以确保一致性。
3.高程测试为了确保GPS设备可以正确计算海拔高度,可以进行高程测试。
测试人员可以移动到不同的海拔高度位置,记录设备显示的高度与实际高度的差距。
测试结果应满足设备的高度测量要求。
4.时间同步测试为了确保GPS设备的时间同步准确,可以进行时间同步测试。
测试人员可以使用其他已知准确时间的设备,与GPS设备进行比较,并记录时间上的偏差。
测试结果应满足设备的时间同步要求。
5.跟踪能力测试为了确保GPS设备可以准确追踪物体,可以进行跟踪能力测试。
测试人员可以使用移动设备,在不同速度下移动,并观察GPS设备是否能够准确追踪移动物体的位置和速度。
测试结果应满足设备的跟踪要求。
四、测试数据分析与评估在完成测试后,需要对测试数据进行分析与评估。
可以比较实际测量值与设备规格的要求,评估设备的性能是否符合要求。
GPS北斗双频、导航模块 天线分析
BDS/GNSS 全星座定位导航模块GB1612-5N用户手册深圳市锦瑞达电子有限公司广东省深圳市宝安区25 区华丰商务大厦D 栋302电话:0755-********传真:0755-********版本更新历史版本1.0 1.1 日期更新内容初稿2015/7/012015/12/1 增加产品选购说明;增加订单型号说明;增加同系列单GPS模块,单BDS模块的功能说明;增加Flash、在线升级协议等特性说明修订有源天线应用电路图;增加无源天线应用电路图;修改联系电话为技术支持电话;其他文本完善;1 功能描述1.1 概述GB1612-5N系列模块是12X16尺寸的高性能BDS/GNSS全星座定位导航模块系列的总称。
该系列模块产品都是基于锦瑞达第四代低功耗GNSS SOC 单芯片—AT6558,支持多种卫星导航系统,包括中国的BDS(北斗卫星导航系统),美国的GPS,俄罗斯的GLONASS,欧盟的GALILEO,日本的QZSS以及卫星增强系统SBAS(WAAS,EGNOS,GAGAN,MSAS)。
AT6558是一款真正意义的六合一多模卫星导航模块,包含32个跟踪通道,可以同时接收六个卫星导航系统的GNSS信号,并且实现联合定位、导航与授时。
本系列模块具有高灵敏度、低功耗、低成本等优势,适用于车载导航、手持定位、可穿戴设备,可以直接替换U-blox NEO系列模块。
1.2 产品选购型号多模功能电源接口特性GB1612-5N-1XGB1612-5N-2XGB1612-5N-3XGB1612-5N-5XGB1612-5N-7X1.3 性能指标出色的定位导航功能,支持BDS/GPS/GLONASS卫星导航系统的单系统定位,以及任意组合的多系统联合定位,并支持QZSS和SBAS系统支持 A-GNSS冷启动捕获灵敏度:-148dBm跟踪灵敏度:-162dBm定位精度:2.5米(CEP50)首次定位时间:32秒低功耗:连续运行<25mA(@3.3V)内置天线检测及天线短路保护功能注1:以上性能指标适用于GB1612-5N-1X、GB1612-5N-3X、GB1612-5N-5X、GB1612-5N-7X模块。
GPS接收机对比表.

IP67防尘,短时浸入水下1m不损坏
非工作时,可经受2m高测杆处跌落
TSC2/TCU
Trimble Survey Controller(12.44及以上版本)
TSC2:
TCU:
R7GNSS
GPS接收机官方资料对比表(红色
R8 GNSSⅢ
三频双星 分体
72通道
三频三星 一体
IP67防尘,短时浸入水下1m不损坏 IP67防尘
非工作时,可经受2m高测杆处跌落 可经受1m高度跌落在水泥表面
Recon Trimble Digital Fieldbook
TSC2
Trimble Survey Controller(12.45及以 上版本)
Recon:
TSC2:
新R6
双频双星 一体 72通道 Maxwell5 GNSS芯片 GPS(L1C/A码、L2C、L2E-追踪L2P的方法)、 GLONASS(L1C/A、L1P、L2C/A-仅GLONASS M、 L2P)、SBAS(L1C/A) 11MB 450M接收选件:5.8小时;450M收发选件:3.7小 时;GSM/GPRS:4.1小时(根据温度和无线数据速 率而改变) 接收/发射选项
有
无
1.34kg(带内置电池、内置无线调制 解调器、标准UHF天线)。3.70kg(整 个RTK流动站,包括电池、标杆、控制 器和托架)
1.5kg(带内置电池、内置电台、标准UHF 天线)。3.70kg(整个RTK流动站,包括 电池、测杆、控制器和托架)
19cm宽×10.9cm高
13.5cm×8.5cm×24cm
Maxwell5 GNSS芯片
双频双星 分体 72通道
Maxwell GNSS芯片
PDAGPS检测报告

PDAGPS检测报告针对天宝GPS设备⽆法定位或定位较慢的问题,我进⾏了测试,其中也多次与⼚家的技术顾问进⾏沟通,下⾯将测试情况做⼀简单说明。
这⼀问题我们在⽤其他GPS还没有遇到过,根据当时设想可能的原因:1、该GPS是测量型GPS,⽽不是导航型的;2、GPS参数设置问题;由于天宝GPS设备基本上是测量型的,⽽测量型GPS测试时对地理环境的要求是很⾼的,如果是第⼀次或超过⼀个星期连接GPS时, GPS设备有初始化的过程,测试中我们发现如果在空旷的环境下尝试连接GPS,并保持连接⾄少需要4分钟以上,⽽在有遮挡物的情况下定位将需要更长的时间或者根本就⽆法定位。
关于第⼆种情况我们根据郭博⼠提供的设置⽅法,经测试后发现和默认设置的定位⽆任何区别,所以我们怀疑是测量型GPS导致定位时间长的问题。
为了进⼀步确认我们上述的分析,我们做了以下两个对⽐试验:1、拿四款不同的没有初始定位信息的GPS,分别是:天宝GPS、神达GPS、CF-30 GPS、NAVMAN GPS。
在空旷环境下天宝GPS⼤概需要4分~5分钟时间内实现3D定位;相同环境下神达GPS、CF-30 GPS、NAVMAN GPS⼤概需要3分~4分钟时间内实现3D定位。
在有遮挡物环境下天宝GPS⼤概需要15分~20分钟时间内实现定位2D或3D定位,有些情况下根本⽆法定位;相同环境下神达GPS、CF-30 GPS、NAVMAN GPS⼤概需要5分~10分钟时间内实现了2D或3D定位;2、⽤上述初始化过的GPS,在上述四种设备上做再次定位试验,结果在空旷环境下天宝GPS⼤概需要30秒~90秒时间内实现3D定位;相同环境下神达GPS、CF-30 GPS、NAVMAN GPS⼤概需要10秒~70秒时间内实现3D定位。
在有遮挡物环境下天宝GPS⼤概需要30秒~120秒时间内实现定位2D或3D定位,有些情况下⽆法定位;相同环境下神达GPS、CF-30 GPS、NAVMAN GPS⼤概需要30秒~90秒时间内实现了2D或3D定位;另外,在测试中我们也发现,在双城PDA设备上使⽤CF-30GPS并且未接天线情况下很难在短时间内实现3D定位,即便实现了3D定位,也会出现再次失锁的情况。
GPS产品测试标准
后测试,不应出现品质问题)
1) 频播放:支持 WMV9, MPEG4, Divx 5.0, 4.0, 3.11, Xvid and MPEG2(最大
2) 20*240 分辨率),以及.wmv, .asf and .avi 文件格式;
1) 开启主机电源,使用笔尖轻轻按下 reset 键;
4
主机 reset 键 2) 主机应能冷启动;
3)在按下 reset 键 20 秒之内应能进入主菜单。
5 USB 数据传输测试 用 USB 线连接电脑和 GPS 机器,应看到电脑和机器的有效
6 AC 插入测试: 1)通过测试软件
1)进入音频播放器,点击各相应的小图标:循坏、随机、进度条、音量条、播放、暂停、上一 曲、下一曲、返回图标,及关闭窗口图标是否可正常操作。
TP52
top
VDD_CORE
1.35+/-0.1
CPU CORE 电源
TP53
top
VDD_IO
3.2+/-0.1
系统外设电源
TP12
top
VDD_GPS
3.2+/-0.1
GPS 模块电源
TP63
top
DGND
主板系统地
6
第二节,半成品、成品测试
测试标准、步聚列表
序 号
测试项目
测试步骤描述
1
测试准备
VDD_MAX
5+/-0.5
系统主电源
TP54
top
VDD_MEM
3.3+/-0.1
CPU 及内存电源
GPS测试方法
可靠性:
平均无故障工作时间: MTBF ≥ 5000h
平均维修时间:
MTTR ≥ 0.5h
环境要求:
工作环境: -20oC -- +55oC 保存环境: -20oC -- +70oC 相对湿度: 5% -- 90%,40 oC 无凝结
地址:北京市海淀区上地信息路 12 号(中关村发展大厦)E 座一层 100085
NS600 12 通 道 GPS 信号模拟器
两端均为 TNC 接头 电缆长度:10 米 ZYWV-50-5 线缆 @1600MHz,衰减 3dB
NS-T18 一分八 GPS 信号分路器
有源分路器 增益:3dB
板级测试线缆: 前端为 TNC 接头 后端可用的常见接头有:
TNC SMA MCX MMCX …… 电缆长度:10 米 @1600MHz,衰减 3dB
电话:010-62983328 传真:010-62976950
北京东方联星科技有限公司 OlinkStar Co., Ltd.
4.2 NS-T18 一分八 GPS 信号分路器
Page 9 of 10
产品名称:GPS 天线分路器
产品型号:NS-T18
产品功能:
输入一路 GPS 信号,经放大、滤波后,分八路 输出。如图中 IN,OUT1 至 OUT8 所示。
地址:北京市海淀区上地信息路 12 号(中关村发展大厦)E 座一层 100085
电话:010-62983328 传真:010-62976950
北京东方联星科技有限公司 OlinkStar Co., Ltd.
Page 2 of 10
z 测试指标的不完整:进行测试的时候,一般要进行灵敏度测试,冷启动定位时间测试。 更多的要求可能还会提到定位精度测试,动态一致性测试等等。
4种DGPS模块动态定位精度测试与分析

态、差分模式、NM EA 输出频率等参 数设置, 方 便系 CDMA 无线上网卡接入广东省连续运行虚拟参考站
统集成应用.
系统 ( DGCORS ), 获 取 VRS-RTK 差 分 数 据, 实 现
1. 2 瑞士 U blox LEA-4S模块
RTK动态定位, 为 DGPS模块 测试提供厘米级 精度
关键词: GPS; 伪距; 动态定位; 测试 中图分类号: S219411X ( 2010) 01-0102- 06
Study on Dynam ic P osition ing P recision of 4 K inds DGPS M odules
组的 20通道 GPS 接收 模块, 支持的差 分数据源 包 括: RTCM SC-104 ( 211 版 本 ) 、WAAS、EGNOS 和 MSAS. 冷启动时间 42 s, 温启动时间 38 s, 热启动时
的横向定位误差进行了傅立叶分析, 认为其 包含明 间 1 s. 单机定 位精度 10 m ( 2DRM S) ; WAAS 差分
摘机器人关键技术研究 0 ( 2006AA 10Z225); 广东省 科技计 划项目 / 拖拉 机辅助 导航系 统 0 ( 2007A 020300010-5 ); 广东省自然科学基金 / 基于神 经网络的轮式农业机械导航控制算法研究 0 ( 07301499)
第 1期
张智刚等: DGPS模块动态定位精度测试与分析
模块的动态定位精度进行了测试, 分析了这 4 种
台湾 GstarGS-89m-J是基于 MTK MT 3318F 核心
DGPS定位模块的定位性能, 为相关应用行业的 GPS 芯片组的 32通道 GPS接收模块, 支持的差分数据源
模块选型提供参考.
测量型GPS仪器比较

测量型GPS仪器比较发表时间:2016-01-05T10:50:50.010Z 来源:《基层建设》2015年19期供稿作者:王鹏[导读] 黑龙江省第一地质勘察院全球定位系统(Global Positioning System - GPS)由空间星座部分、地面监控部分和用户接收设备三大部分组成。
王鹏黑龙江省第一地质勘察院摘要:本论文以科学的方法对Trimble、Ashtech、南方测绘三个厂家GPS信号接收机和数据后处理软件进行比较。
首先从GPS的发展历史和现状及其存在的问题进行分析研究,结合GPS系统和信号接收机的原理,对GPS结构等不同的方面进行分析比较,然后比较分析了各型号GPS的物理指标、精度指标和性能,并对各型号GPS对应的数据后处理软件进行了实验分析。
最后是通过比较得出结论和对测量工程选用GPS仪器提供一些建议。
关键词:GPS;信号接收机;数据后处理软件;精度指标Abstract:This paper by the scientific method to compare Trimble,Ashtech,Southsurvey GPS signal recivers and post-processing software.The paper first conducts the analytical study from the GPS present situation and the existence question,unifies the GPS system and the signal receiver's principle,and so on different aspect carries on the analysis comparison to the GPS structure,then the comparative analysis various models GPS physical target,the precision target,and the performance,and have carried on the experiment analysis to various models GPS correspondence's data post-processing software.Finally is draws the conclusion through the comparison and to surveys the project to select the GPS instrument to provide some suggestions.Key words:GPS;signal receiver;post-processing software;accuracy index引言对测量型GPS仪器的比较的目的就是比较测量型GPS仪器的基本原理,大体结构,特点及各种GPS之间的优缺点,从而更好的利GPS 为我国的测绘事业服务。
gps——精选推荐

gps《GPS测量定位技术》综合测试试卷A 卷答案(2011-02-18 11:04:06)转载标签:杂谈⼀、填空(每空1分,共20分)1.⼦午卫星导航系统采⽤6颗卫星,并都通过地球的南北极运⾏。
2.⾃1974年以来,GPS计划已经历了⽅案论证、系统论证、⽣产实验三个阶段。
总投资超过200亿美元。
3.按照《规范》规定,我国GPS测量按其精度依次划分为AA、A、B、C、D、E六级,其中C级⽹的相邻点之间的平均距离为15~10km,最⼤距离为 40 km。
4.协调世界时是综合了世界时与原⼦时的另⼀种记时⽅法,即秒长采⽤原⼦时的秒长,时刻采⽤世界时的时刻。
5.卫星钟采⽤的是 GPS 时,它是由主控站按照美国海军天⽂台(USNO)的协调世界时(UTC)进⾏调整的。
在 1980 年1⽉6⽇零时对准,不随闰秒增加。
6.当GPS信号通过电离层时,信号的路径会发⽣弯曲,传播速度会发⽣变化。
这种距离改正在天顶⽅向最⼤可达 50 m,在接近地平线⽅向可达150m。
7.在GPS定位测量中,观测值都是以接收机的相位中⼼位置为准的,所以天线的相位中⼼应该与其⼏何中⼼保持⼀致。
8.当使⽤两台或两台以上的接收机,同时对同⼀组卫星所进⾏的观测称为同步观测。
9.按照GPS系统的设计⽅案,GPS定位系统应包括空间卫星部分、地⾯监控部分和⽤户接收部分。
10.在接收机和卫星间求⼆次差,可消去两测站接收机的相对钟差改正。
在实践中应⽤甚⼴。
11.卫星星历误差实际上就是卫星位置的确定误差。
也是⼀种起始数据误差,其⼤⼩主要取决于卫星跟踪站的数量及空间分布、观测值的数量及精度、轨道计算时所⽤的轨道模型及定轨软件的完善程度。
12.GPS⽹的图形设计主要取决于⽤户的要求、经费、时间、⼈⼒以及所投⼊接收机的类型、数量和后勤保障条件等。
13.根据不同的⽤途,GPS⽹的图形布设通常有点连式、边连式、⽹连式及边点混合连接四种基本⽅式。
选择什么⽅式组⽹,取决于⼯程所要求的精度、野外条件及GPS接收机台数等因素。
GPS设计测试指导V1.2
GPS设计测试指导预研及软件工程中心2014-3-25目录1.GPS硬件设计标准 (3)1.1电路设计要求 (3)1.2 PCB layout设计要求 (6)1.3连接线设计要求 (8)1.4 天线规格要求 (9)1.5 影响搜星的一些情况 (9)2.GPS测试标准流程 (10)2.1 GPS天线测试方法流程 (10)2.2GPS整机、模块测试方法 (12)2.3GPS测试平台标准 (17)3.GPS车机安装指导 (17)4.研发案例总结 (17)4.1 GPS信号掉帧 (17)4.2电源纹波导致的搜星强度过低 (18)4.3信号干扰 (18)4.4电路设计问题 (18)4.5天线接口过松 (19)4.6GPS天线问题 (19)4.7总结影响GPS信号的原因 (19)1.G PS硬件设计标准1.1电路设计要求目前公司使用最多的是U-BLOX导航模块的NEO-6M,因为6M模块的内部结构以及GPS 的工作频率在1.57542Hz的特性,对导航模块的周边电路的设计不能等同于普通模拟电路的设计。
下图为导航模块内部的电路图以及电气特性。
电源设计标准为:模块电源输入VCC=2.7~3.6。
因为模块内部RF电源直接与VCC相连,所以对VCC电源的要求要做到单独LDO供电,保证电源纹波在50mv之内。
LDO的Vout端第一个电容为滤波电容,47~100uF。
必须选用ESR小的电容,比如钽电容,否则对电源纹波的滤波作用不大。
如果选择ESR较大的器件,有时会导致8dB的影响,甚至无法搜星。
VIN 与Vout共接地。
图1因为VCC与VRF在模块内部是直接连接,所以外围电路VRF与VCC的纹波是相通的。
天线供电设计标准为:连接RF进入的地方需串联一个27nh的电感。
此处如果不正确设计,会出现5dB的信号减弱。
图2天线供电方式2:有些导航模块(例如和芯星通导航模块)内部不带天线检测,未有短路保护的,一旦天线外部短路,容易烧模块。
GPS接收模块性能测试探讨

l 埔
僖 号 强 度 2 s l 5 3 7 ¥ 2 0 ∞s ’ 畦 O 0 1 2 5 d B, 褒 潮 4 4 一 舾皿 ( 4 1 - 4 2 曲) 招- 4 9 衄
一
1dB.
倦 号 强 虞 1 2 9 d 3, 襄 澜 l 棚
一
倍 号 强 度 } l 3 。 ∞ ,襄 ; 臧
一
9 4 # 5 s l 3 8 曲t 2坎定位失 觳 扣 如
1 ’ 9 o 0 l
学术 论 坛
l 与 应 用 《
GPS
龚 铣
( 英源达科技有限公司 上海 2 0 1 1 0 8 )
摘 要: G P S 终端 车载产品 近年 来颇 为流行 , 其 中G P S 接收模 块性 能是决定 此类产 品优 劣 的关键 。 本 文以作者 以 自己的工作 实践 和大量 的测试数
据 来探 讨 了GP S 接 收模 块 关健指 标 的测试评 估 。 关键词 : G P S 接收模 块 关健指 标 选定 测试 评估
中图分类 号: T N 9 6 7 . 1
文献标识 码: A
文章 编号 : 1 0 0 7 — 9 4 1 6 ( 2 0 1 3 ) 0 2 — 0 1 9 6 — 0 1
信号强度 寰藏 l 曲 I I 墨 易罗 嗣 I 【 a 确 0 r
f
的性 能指 标 。 现 实 生 活 中的 空 旷 地 带 , 例如草坪/ 广场, 是 评 估 冷 启 动 的 最 佳场所 。 实验 室评估测试方 法为 : 由信号发生器模 拟卫 星信号 , 由电脑 读出G P S 接收模块的接收灵敏度 ; 通过信号发射 强度模拟卫 星信号 强度 的改变 , 使G P S 接 收模块接收信噪 比分别为5 0 d B 、 4 0 d B 、 3 0 d B
GPS模块测试用例
GPS 模块测试用例内容列表测试用例 (1)内容列表 (1)1、概要(测试列表 (2)2、 GPS 性能测试 .........................................................................................................................4 2.1 灵敏度测试 (4)2.2 定位时间测试 ...........................................................................................................................4 2.3 定位精度测试 ...........................................................................................................................6 2.4 其它 . (7)2.5 RTCM语句输入 (9)3、可靠性测试 .............................................................................................................................10 3.1 环境试验 (10)3.2 接口测试 (13)4、电源测试 .................................................................................................................................16 4.1 电压测试 (16)4.2功耗测试 (16)5、结构 /包装检验 ........................................................................................................................17 5.1 常规测试 . (17)5.2 包装可靠性测试 (18)6、 EMC 测试 ...............................................................................................................................19 6.1 ESD测试 (19)1、概要(测试列表1.1 GPS性能测试3424: 跟踪灵敏度测试3426: 重新捕获灵敏度测试 3427: 冷启动捕获灵敏度测试 3439: 冷启动捕获时间测试 3440: 热启动捕获时间测试 3441: 温启动捕获时间测试 3609: 自动定位测试3442: 静态 GPS 精度测试3443: 跟踪速度测试3444: 跟踪加速度测试3445: 极限高度测试3598: 所有通道测试3603: 位置数据更新时间测试 (4Hz 3604: 位置数据更新时间测试 (1Hz 3605: 位置数据更新时间测试 (2Hz 3606: 睡眠功能及唤醒测试 3607: PPS秒脉冲输出功能3608: PPS秒脉冲输出精度3610: RCT时钟数据保存3615: RTCM功能验证1.2 结构 /包装检测3429: 包装常规检验3430: 包装储运标志检验3431: 外观尺寸测试3432: 重量测试3433: 走线测试3435: 表面平整度测试3436: 包装跌落测试3437: 包装倾翻测试3438: 包装冲击测试1.3 电源测试3357: 工作电压测试3358: 复位测试3359: GPS工作功耗测试3360: 睡眠状态功耗测试1.4环境试验3421: 高温存储测试3422: 高温工作测试3423: 低温存储测试3425: 低温工作测试3428: 老化测试3474: 振动测试3477: 温度冲击测试3478: 恒定湿热试验3479: 热开机试验3480: 冷开机测试3481: 快速开关机试验1.5 接口测试3611: 串口通讯测试(com1 3612: 串口通讯测试(com2 3613: 输出数据格式测试(com1 3614: 输出数据格式测试(com2 3616: 输出端子短路测试3617: 天线端口短路测试3618: 输入数据格式测试(USB 3619: 输出数据格式测试(USB 1.6 EMC3434: 静电放电抗绕度测试2、 GPS 性能测试2.1 灵敏度测试测试用例 3424: 跟踪灵敏度测试摘要 :测试目的 :测试可跟踪的最低卫星信号强度是否满足要求。
多功能GPS接收器模块评测试试用套件说明书

MULTI SPIDER (ORG4572) GNSS RECEIVER MODULE EVALUATION KIT DatasheetO r i g i n G P S . c o mINDEX1. SCOPE (4)2. DISCLAIMER (4)3. SAFETY INFORMATION (4)4. ESD SENSITIVITY (4)5. CONTACT INFORMATION (4)6. RELATED DOCUMENTATION (4)7. REVISION HISTORY (5)8. ABOUT SPIDER FAMILY (5)9. ABOUT MULTI SPIDER MODULE (5)10. ABOUT ORIGINGPS (6)11. DESCRIPTION (6)12. SCHEMATICS (7)12.1. MAIN BOARD SCHEMATICS (7)12.2. INTERFACE ADAPTOR SCHEMATICS (8)13. BILL OF MATERIALS (9)13.1. MAIN BOARD BILL OF MATERIALS (9)13.2. INTERFACE ADAPTOR BILL OF MATERIALS (9)14. ASSEMBLY AND LAYOUT (10)14.1. MAIN BOARD PCB (10)14.2. INTERFACE ADAPTOR PCB (12)15. TTL-232R-3V3 USB-Serial CONVERTER CABLE (15)16. ORG9802 MINIATURE PASSIVE ANTENNA ASSEMBLY (16)16.1. GENERAL (16)16.2. MECHANICAL SPECIFICATIONS (16)16.3. ELECTRICAL SPECIFICATIONS (17)17. ORG9805 EXTERNAL ACTIVE ANTENNA (18)17.1. DESCRIPTION (18)17.2. FEATURES (18)17.3. BENEFITS (18)17.4. BLOCK DIAGRAM (18)17.5. ELECTRICAL SPECIFICATIONS (19)17.6. MECHANICAL SPECIFICATIONS (20)18. I-PEX MHFIII TO SMA-TYPE COAXIAL CABLE ADAPTOR (21)TABLE INDEXTABLE 1 – RELATED DOCUMENTATION (4)TABLE 2 – REVISION HISTORY (5)TABLE 3 – MAIN BOARD BILL OF MATERIALS (9)TABLE 4 – INTERFACE ADAPTOR BILL OF MATERIALS (9)TABLE 5 –USB-SERIAL CONVERTER CABLE HEADER PIN-OUT (15)TABLE 6 –USB-SERIAL CONVERTER CABLE OPERATING PARAMETERS (15)TABLE 7 –ORG9802 MECHANICAL SPECIFICATIONS (16)TABLE 8 –ORG9802 ELECTRICAL SPECIFICATIONS (17)TABLE 9 –ORG9805 ELECTRICAL SPECIFICATIONS (19)TABLE 10 – ORG9805 MECHANICAL SPECIFICATIONS (20)FIGURE INDEXFIGURE 1 – MAIN BOARD SCHEMATICS (7)FIGURE 2 – INTERFACE ADAPTOR SCHEMATICS (8)FIGURE 3 – MAIN BOARD COMPONENTS PLACEMENT (10)FIGURE 4 – MAIN BOARD SOLDER MASK (10)FIGURE 5 – MAIN BOARD TOP LAYER ROUTING (11)FIGURE 6 – MAIN BOARD BOTTOM LAYER ROUTING (11)FIGURE 7 –INTERFACE ADAPTOR BOARD COMPONENTS PLACEMENT (12)FIGURE 8 – INTERFACE ADAPTOR BOARD SOLDER MASK (12)FIGURE 9 – INTERFACE ADAPTOR BOARD TOP LAYER ROUTING (13)FIGURE 10 – INTERFACE ADAPTOR INNER LAYER 1 ROUTING (13)FIGURE 11 –INTERFACE ADAPTOR INNER LAYER 2 ROUTING (14)FIGURE 12 – INTERFACE ADAPTOR BOTTOM LAYER ROUTING (14)FIGURE 13 – PIN HEADER SOCKET BOTTOM VIEW (15)FIGURE 14 – ORG9802 MECHANICAL OUTLINE (16)FIGURE 15 –ORG9802 S11 LOG MAGNITUDE (17)FIGURE 16 –ORG9805 S11 LOG MAGNITUDE (18)FIGURE 17–ORG9805 BLOCK DIAGRA M (19)FIGURE 18– ORG9805 MECHANICAL OUTLINE (20)FIGURE 19– I-PEX MHFIII TO SMA-TYPE ADAPTOR MECHANICAL OUTLINE (21)1. SCOPEThis document describes the features and specifications of Multi Spider ORG4572 evaluation kit.2. DISCLAIMERAll trademarks are properties of their respective owners.Performance characteristics listed in this document do not constitute a warranty or guarantee of product performance. OriginGPS assumes no liability or responsibility for any claims or damages arising out of the use of this document, or from the use of integrated circuits based on this document.OriginGPS assumes no liability or responsibility for unintentional inaccuracies or omissions in this document. OriginGPS reserves the right to make changes in its products, specifications and other information at any time without notice.OriginGPS reserves the right to conduct, from time to time, and at its sole discretion, firmware upgrades.As long as those FW improvements have no material change on end customers, PCN may not be issued. OriginGPS navigation products are not recommended to use in life saving or life sustaining applications.3. SAFETY INFORMATIONImproper handling and use can cause permanent damage to the product.4. ESD SENSITIVITYThis product is ESD sensitive device and must be handled with care.5. CONTACT INFORMATIONSupport - *********************or Online FormMarketing and sales - ***********************Web –w 6. RELATED DOCUMENTATIONTABLE 1 – RELATED DOCUMENTATION7. REVISION HISTORYTABLE 2 – REVISION HISTORY8. ABOUT SPIDER FAMILYOriginGPS GNSS receiver modules have been designed to address markets where size, weight, stand-alone operation, highest level of integration, power consumption and design flexibility - all are very important. OriginGP S’ Spider family breaks size barrier, offering the industry’s smallest fully-integrated, highly-sensitive GPS / GNSS modules.Spider family features OriginGPS' proprietary NFZ™ technology for high sensitivity and noise immunity even under marginal signal condition, commonly found in urban canyons, under dense foliage or when the receiv er’s position in space rapidly changes.Spider family enables the shortest TTM (Time-To-Market) with minimal design risks.Just connect an antenna and power supply on a 2-layer PCB.9. ABOUT MULTI SPIDER MODULEMulti Spider is a complete SiP featuring miniature LGA SMT footprint designed to commit unique integration features for high volume cost sensitive applications.Designed to support ultra-compact applications such as smart watches, wearable devices, trackers and digital cameras, ORG4572 module is a miniature multi-channel GPS/ GLONASS with SBAS, QZSS and other regional overlay systems receiver that continuously tracks all satellites in view, providing real-time positioning data in industry’s standard NMEA format.ORG4572 module offers superior sensitivity and outstanding performance, achieving rapid TTFF in less than one second, accuracy of approximately one meter, and tracking sensitivity of -165dBm.Sized only 7mm x 7mm the ORG4572 GNSS module is pin and footprint compatible with OriginGPS’ popular ORG4472 GPS module.ORG4572 module integrates LNA, SAW filter, TCXO, RTC crystal and RF shield with market-leading SiRFs tarV™ GNSS SoC.ORG4572 module is capable to decode extremely weak satellite signals simultaneously from GPS and GLONASS thereby offering best-in-class positioning availability, unparalleled accuracy and extremely fast fixes under challenging signal conditions, such as in built-up urban areas, dense foliage or even indoor.Internal GNSS SoC incorporating high-performance microprocessor and sophisticated GNSS firmware keeps positioning payload off the host allowing integration in embedded solutions even with low computing resources.Innovative architecture can detect changes in context, temperature, and satellite signals to achieve a state of near continuous availability by maintaining and opportunistically updating its internal fine time, frequency, and ephemeris data while consuming mere microwatts of battery power.10. ABOUT ORIGINGPSOriginGPS is a world leading designer, manufacturer and supplier of miniature positioning modules, antenna modules and antenna solutions.OriginGPS modules introduce unparalleled sensitivity and noise immunity by incorporating Noise Free Zone system (NFZ™) proprietary technology for faster position fix and navigation stability even under challenging satellite signal conditions.Founded in 2006, OriginGPS is specializing in development of unique technologies that miniaturize RF modules, thereby addressing the market need for smaller wireless solutions.11. DESCRIPTIONEvaluation Kit of the ORG4572 GNSS Module comprises the Demo Board, USB to UART Serial Converter Cable, ORG9802 Miniature Passive Antenna Assembly, I-PEX MHFIII to SMA-type Coaxial Cable Adaptor, ORG9805 External Active Antenna, support Disk-on-key with GPS simulator software for PC and documentation. The Demo Board assembly is built of Main Board, incorporating 3.3V LDO voltage regulator, UART connector, push-button tactile switch for Push-To-Fix™interrupt and various test points.The ORG4572 GNSS Module is soldered onto the Main Board through the Interface Adaptor.The Interface Adaptor includes a single-bit buffer for voltage level translation of TX line, 1.8V LDO voltage regulator, Load Switch for active antenna T-bias and a voltage supervisor for autonomous power-on pulse generation.TitleORG447X UART Demo BoardTitleORG447X Adaptor13. BILL OF MATERIALS13.1 MAIN BOARD BILL OF MATERIALSTABLE 3 - MAIN BOARD BILL OF MATERIALS13.2 INTERFACE ADAPTOR BILL OF MATERIALSTABLE 4 - INTERFACE ADAPTOR BILL OF MATERIALS14. ASSEMBLY AND LAYOUT14.1 MAIN BOARD PCBMain Board for the ORG4572 GNSS Module is 2-layer 1.6mm thickness FR4 PCB.FIGURE 3 - MAIN BOARD COMPONENTS PLACEMENTFIGURE 4 - MAIN BOARD SOLDER MASKFIGURE 5 – MAIN BOARD TOP LAYER ROUTINGFIGURE 6 – MAIN BOARD BOTTOM LAYER ROUTING14.2 INTERFACE ADAPTOR PCBInterface Adaptor Board for the ORG4572 GNSS Module is 17mm x 17mm 22 pads 4 layers 0.6mm thickness FR4 PCB.FIGURE 7 - INTERFACE ADAPTOR BOARD COMPONENTS PLACEMENTFIGURE 8 - INTERFACE ADAPTOR BOARD SOLDER MASKFIGURE 9 - INTERFACE ADAPTOR BOARD TOP LAYER ROUTINGFIGURE 10 - INTERFACE ADAPTOR INNER LAYER 1 ROUTINGFIGURE 11 - INTERFACE ADAPTOR INNER LAYER 2 ROUTINGFIGURE 12 - INTERFACE ADAPTOR BOTTOM LAYER ROUTING15. TTL-232R-3V3 USB-Serial CONVERTER CABLE*The TTL-232R-3V3 is a USB to Serial converter cable that provides a simple way to connect devices with UART interface to PC.The TTL-232R-3V3 uses an FTDI FT232RQ IC which is housed inside the USB Type 'A' connector and is terminated at the end of a 1.8 meter cable (6 ft.) with a 2.54mm (“0.1) pitch header socket which provides an access to UART standard Transmit Data (TxD) and Receive Data (RxD). These lines are operating at 3.3V LVTTL levels. Also brought out on the header are +5V and GND.FIGURE 13 - PIN HEADER SOCKET BOTTOM VIEWTABLE 5 - USB-SERIAL CONVERTER CABLE HEADER PIN-OUTTABLE 6 - USB-SERIAL CONVERTER CABLE OPERATING PARAMETERS*Note: For more information refer to FTDI Ltd. TTL-232R TTL To USB Serial Converter Range Of Cables Datasheet, Document Reference No.: FT_00005416. ORG9802 MINIATURE PASSIVE ANTENNA ASSEMBLY*16.1 GENERALORG9802 is a miniature antenna assembly, comprising four components: 1. Ceramic patch antenna element 2. Adaptor PCB 3. Coaxial cable 4. Connector16.2 MECHANICAL SPECIFICATIONSFIGURE 14 - ORG9802 MECHANICAL OUTLINETABLE 7 - ORG9802 MECHANICAL SPECIFICATIONS*Note: For more information refer to OriginGPS ORG9802 Patch Antenna Assembly Datasheet, Document number 30031116.3 ELECTRICAL SPECIFICATIONSTABLE 8 - ORG9802 ELECTRICAL SPECIFICATIONS TYPICAL S11FIGURE 15 - ORG9802 S11 LOG MAGNITUDE17. ORG9805 External Active Antenna*17.1 DESCRIPTIONThe ORG9805 External Active Antenna incorporates high-efficiency ceramic patch antenna element, high out- of-band rejection band-pass Surface Acoustic Wave (SAW) filter, low Noise Figure and high gain Low Noise Amplifier (LNA), enclosed in plastic case, with coaxial cable terminated by standard SMA-type plug. The ORG9805 Active Antenna with highest GNSS-band performance and notch filtering for out-ofband signals provides exceptional sensitivity, high selectivity and noise immunity. The ORG9805 Active Antenna is built of highest quality materials and components.The ORG9805 Active Antenna is the perfect match to the OriginGPS GNSS receiver modules.17.2 FEATURES∙ Antenna element with high efficiency for excellent coverage of GNSS satellites ∙ SAW filter for rejection of out-of-band signals∙ LNA with low Noise Figure and high gain for high sensitivity ∙ Plastic case with magnetic base∙ RG-174 flexible coaxial cable of 5m length ∙ SMA-type gold plated plug17.3 BENEFITS▪ High performance ▪ Compact size ▪ Easy integration17.4 BLOCK DIAGRAMFIGURE 16 - ORG9805 BLOCK DIAGRAMRF out DC in*Note: For more information refer to OriginGPS ORG9805 External Active Antenna Datasheet, Document number 160112TABLE 9 - ORG9805 ELECTRICAL SPECIFICATIONSFIGURE 17 - ORG9805 S11 LOG MAGNITUDETABLE 10 - ORG9805 MECHANICAL SPECIFICATIONSFIGURE 18 - ORG9805 MECHANICAL OUTLINEPage 21 of 21 June 14, 2015 Multi Spider - ORG4572 Evaluation Kit Datasheet Revision 2.018. I-PEX MHFIII TO SMA-TYPE COAXIAL CABLE ADAPTORFIGURE 19 - I-PEX MHFIII TO SMA-TYPE ADAPTOR MECHANICAL OUTLINE。
GPS现代化后L2与L5载波信噪比分析
Signal-to-Noise Ratio Quality Analysis of GPS Moderni-zation L 2 and L 5 FrequencyDanning ZHAO1,2,3, Xiaochun LU 1,2, Wenfang JING 1,2,31. National Time Service Center , Chinese Academy of Sciences , Xi’an 710600 , China ;2. Key Laboratory of Precision Navigation and Timing Technology , Chinese Academy of Sciences , Xi’an 710600 , China ;3. Graduate University of Chinese Academy of Sciences ,Beijing 100039 China ;Abstract: Firstly , the characteristic of 5L frequency is introduced , and its effct on GPS user is analyzed ; then based on real GPS data , signal-to-noise ratio(SNR) quality of 1L , 2L and 5L three different fre-quencies is compared and analyzed in detail , and also SNR of GPS modernization 2L frequency is analyzed ; finally , the result indicates that SNR of 5L frequency is best in three , and 1L frequency is better than 2L ; in addition , SNR of GPS modernization 2L frequency, which is resumed by L2C code, is better than that ob-tained before GPS modernization .Keywords: GPS modernization ;5L frequency ;2L frequency ;1L frequency ;signal-to-noise ratio ;quality analysisGPS 现代化后2L 与5L 载波信噪比分析赵丹宁1,2,3,卢晓春1,2,荆文芳1,2,31. 中国科学院国家授时中心 , 西安 710600 ;2. 中国科学院精密导航定位与定时技术重点实验室 ,西安 710600 ;3. 中国科学院研究生院,北京 100039 ;【摘要】介绍了5L 载波的特点,分析了其主要作用;利用实测数据分析了1L 、2L 、5L 载波的信噪比,并对GPS 现代化后2L 载波信噪比的变化特点进行了比较,结果表明:三频载波中5L 载波信噪比最优,而1L 载波又优于2L ;GPS 现代化后,用L2C 码恢复的2L 载波的信噪比明显提高。
GPS对比
GPS 销售培训内容一、 GPS 原理介绍:1、 GPS 定义:是英文词组全球定位系统的首字母缩写词,她是美国国防部 1974 年前后开发的一个军用卫星导航系统,提供 :• 全球覆盖能力• 每天 24 小时服务• 成本低廉的最终用户设备• 确保军方安全• 10-20 m 导航点位精度• 0.1 m/s 速度测定精度• <100 ns 精密授时能力• 从 1995 年 6 月投入全面运转2、 GPS 构成:GPS 系统由三个主要部分组成:空间部分、地面控制部分、用户接受部分; 目前有 27 颗卫星处于工作状态,分布在 6 个轨道平面上,轨道平面的倾角为 55 °,轨道矢径大约为 26,600 km, 轨道曲线的形状几乎为圆形, 轨道周期为 11小时 58分钟, 每天提前 4 分钟可以看到相同的星座分布,提前量 4 分 /天 , 2 小时 /月 , 24 小时 /年,卫星的设计寿命为 7.5 年3、 GPS 定位技术的优越性:与天气状况无关;不要求点与点之间的彼此通视;高度均匀的定位精度; 日夜均可作业; 定位速度之快无与伦比; 大大节省人力资源; 测线长度不受限制; 统一的坐标系统;生产成本低于常规测量技术4、伪距定位原理:至少观测 4 颗卫星,我们就可以解算出 4 个未知参数:测站的纬度、经度、高程及接收机的时钟偏差。
如图:GPS 发展概况:略二、目前国内用户 GPS 构成:在目前国内 GPS 用户中, 天宝 GPS 和原阿什泰克 GPS 占了很大比重, 特别是天宝, 因为一直专注于 GPS 方面的研究和市场开发,在中国国内天宝的市场推广相对比较成功, 加上其质量一直都比较过关, 所以其品牌在用户心目中有很高的地位。
而徕卡 GPS 因为在早期市场推广并不得力, 所以在竞争中往往处于下风, 加上以前的 530GPS 性能不是很好,市场占有率一直偏低。
1、天宝 GPS 概况:目前天宝的 GPS 在中国国内一共有 4家代理商:北京麦格天宝、北京天拓基业、武汉天宝耐特、昆明希普瑞格,在这 4家代理商中间,以麦格和天拓为主要销售力量。
不同GPS后处理软件成果的比较
收稿日期:2012-08-20作者简介:石大鹏(1986-),男,辽宁阜新人,2009年毕业于辽宁工程技术大学测绘工程专业,现在中煤国际工程集团沈阳设计研究院从事测绘工作。
不同GPS 后处理软件成果的比较石大鹏(中煤国际工程集团沈阳设计研究院,辽宁沈阳110015)摘要:为了获得高精度的GPS 控制点位结果,为各种工程建设提供高精度的已知点,论文利用多种成熟的GPS 后处理软件对观音阁水库GPS 控制网观测数据进行数据处理,并对几种软件得出的结果进行了比对;针对试验结果分析不同软件之间精度差异的原因;最终在分析比较中得出最优结果。
希望这为GPS 软件用户在进行数据处理提供有益的参考。
关键词:GPS ;数据处理;点位;精度中图分类号:P228.4文献标识码:B文章编号:1671-0959(2012)S2-0164-03近年来GPS 卫星定位技术广泛应用,使传统控制测量发生了重大的技术改革。
随之而来的不同GPS 仪器生产厂家也在不断更新完善自己的后处理软件性能,更有一大批国内外新生GPS 软硬件不断涌现。
因此,十分有必要对不同GPS 后处理软件进行研究和比较,从而研究出不同软件的特性。
此前国内外对此项方面研究不是很多,但是对于不同GPS 后处理软件的研究无论对于科研生产部门还是对于施工应用部门都具有理论和实践意义。
以观音阁水库GPS 静态数据为原始数据,运用国内外五家GPS 后处理软件(天宝TGO 、拓普康Pinnacle 、阿什泰克Solution 、中海达HDS2003、南方GPSADJ )进行了解算。
文中对各个软件在基线、闭合环、无约束平差和约束平差等方面加以比较,分析了各个软件之间的精度差异,并且研究了软件之间产生差异的原因,最后从原因入手得出了一些建议性结论。
1软件简介天宝TGO 。
该软件是Trimble 公司最新一代的数据处理和管理软件,是在GPSurvey 软件的基础上,增加了DTM -Link (生成DTM 和等高线图)和RoadLink (道路设计、放样等)程序模块,改进成一个整体的全能的纯Windows 界面的测量数据处理软件。
关于GPS高程测量精度的分析比较

⁝
⁝
⁝
⁝⁝⁝ ⁝ ⁝
ξn
an
vn
1 xn yn xnyn …
在最小二乘的准则下 ,求得向量 X 的解 ,回代到式 (3) 中 ,就
可以内插出来未知点的高程异常 。再根据式 (1) 就可以计算出
GPS 点的正常高 。
在式 (3) 中 ,如果取未知数一次项 ,则称平面拟合 ;取二次项 ,
又称曲面拟合 ;取三次项 ,称三次多项式拟合 ,以此类推 。
域建设公园 ,在保证生态系统稳定性和良性循环的基础上 ,保证 绿地生态资源最大限度向市民开放 ; 50 m 等高线以上的自然山 体以保持原始自然生态环境为主 ,不得从事城市建设活动 。
2. 5 城市交通设施防护绿地
城市交通设施防护绿地是城市区域呈网络绿化的重要用地 , 是体现城市周边 、入城景观和机动车观赏景观的重要组成部分 。 有必要对铁路 、高速公路 、快速路及部分主干路防护绿地进行控制。
建筑 ,2007 ,33 (12) :3512352.
Analysis and comparison of GPS height measurement accuracy
YANG Lei DING Hong Abstract : Through t he connection surveying of 25 GPS points of t he fourt h2grade leveling , t he paper calculates t he normal height of t he points by using t he polynomial fitting model and t he polyhedral function fitting model , compares t he normal height wit h t he results of t he fourt h2 grade leveling , obtains t he beneficial conclusions , which has t he guiding significance for t he practical production of GPS. Key words : normal height , geodetic height , fitting model , GPS height measurement
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试报告
NO:
项目名称
驾考项目
测试产品
GPS模块
规格型号
要求测试内容描述
工程部反馈GPS模块,阴天时使用漂移超过20米。钱总要求重新测试。
系统架构:
测试工具:驾驶员考试用车,工控机,GPS天线。
测试方案:
实验室中静态测试,测试项目包括:刷新频率,定位后的静态漂移。
测试过程:
天气不好时,在办公室的测试过程(参与人员:钱总、倪建宝):
一.公司原来使用的GPS模块和美国天宝GPS定位模块比较。
1.搭建硬件和软件测试环境。测试软件有:u-center。
测试截图
测试结果:
1.美国天宝的模块静态定位的精度比原来使用的模块精度高。
2.天气不好时,GPS模块定位精度都发生偏移。
二.在驾考车上比较测试(测试人员:工程部配合开车人员、倪建宝):
1.搭建硬件和软件测试环境。测试软件有:u-center;
2.测试截图:
测试结果:实际使用开车位置和软件的轨迹一致。
测试结论:
1.在静态漂移性能上,天宝GPS模块优于驾考车上正在使用的模块。
2.阴天时,GPS模块的定位精度比晴天时差。
测试建议:
将正在使用的GPS模块更换为天宝的模块。
备注