CAN-BUS系统引起的漏电故障
CAN-Bus系统的故障诊断与维修
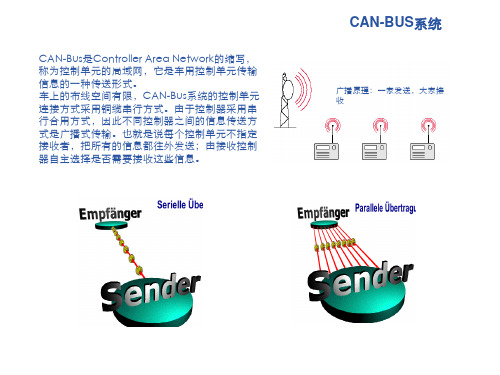
CAN-Bus系统的故障诊断与维修作者:王忠启王敬华李佳妮来源:《中国新技术新产品》2009年第10期摘要:CAN-Bus是Controller Area Network-Bus的缩写,称为控制单元的局域网,是控制单元通过网络交换数据,它是车用控制单元传输信息的一种传送形式。
CAN-Bus系统的控制单元连接方式采用铜缆串行方式。
关键词:汽车;信息传输1 引起CAN-BUS系统的故障的原因汽车电源系统不良引起的CAN-BUS故障汽车信息传输系统的核心部分是含有通信IC芯片的电子控制单元(ECU),ECU被设计的正常工作电压大都在10.5~15.0V的范围内。
如果汽车电源供给系统提供的工作电压低于该值时,就会造成一些对工作电压控制和要求较苛刻的ECU出现短暂的停止工作,从而使整个(或自身系统)汽车信息传输系统出现短暂的通信中断。
这种现象就如同用电脑故障诊断仪在未启动发动机时,就已经设定好要检测的传感界面,但当发动机启动时,往往电脑故障诊断仪又回到初始界面一样汽车信息传输系统的节点不良引起的CAN-BUS故障节点是汽车信息传输系统中的电子控制单元,因此节点故障就是电子控制单元ECU的故障。
它包括软件故障,即传输协议或软件程序有缺陷或冲突,从而使汽车信息传输系统通信出现混乱或无法工作,这种故障一般成批出现,且无法维修。
硬件故障一般由于通信芯片或集成电路故障,造成汽车信息传输系统无法正常工作。
对于采用低版本信息传输协议,即点到点信息传输协议的汽车信息传输系统,如果有节点故障,将会出现整个汽车信息传输系统无法工作的情况。
汽车信息传输系统的链路不良引起的CAN-BUS故障当汽车信息传输系统的链路(或通信线路)出现故障时,例如:通信线路的短路、开路,以及线路物理性质引起的通信信号衰减或失真,都会引起多个电子控制单元无法工作,或者电子控制单元错误动作,而使信息传输系统无法工作。
判断是否为链路故障时,一般采用示波器或汽车专用光纤诊断仪,通过仪器观察通信数据信号是否与标准通信数据信号相符。
CAN总线常见故障的快速检修方法与CAN总线故障的常见故障与万用表检修方法

C目前汽车各大系统基本都由模块统一控制,相同类别的模块组建成一个局域网络,例如发动机、变速器、ASB,气囊就使用CAN总线连接构成了一个驱动CAN。
各局域网之间的通信速率不一样,协议不一样,相互不能直接通信,需要一个网关来协调各个局域网之间的通信(下图)。
▲局域网之间的物理关系网络出现故障,总结起来就是模块本身故障、总线虚接、总线开路、总线之间相互短路、总线对地短路、总线对正极短路。
出现故障的表现就是单一模块不通信、总线瘫痪。
下面针对较常见的故障来讲解维修方法。
Ol单一模块不通信故障检修单一模块不通信是指在一个局域网上所有的模块基本都能通信,且可以读出故障码,但都会报与某一个模块失去通信的故障码。
例如,在驱动CAN总线上面有发动机电脑、自动变速器电脑、ABS电脑,ABS故障灯点亮,使用解码器扫描全车模块,发现发动机电脑、自动变速器电脑有故障码,ABS电脑无法通信。
根据总线通信的原理可以分析出以下信息:驱动CAN总线没有对正极或负极短路,否则驱动CAN总线便瘫痪了。
如果ABS电脑内部有终端电阻,则不考虑ABS电脑的CAN总线开路。
否则驱动CAN总线便瘫痪。
如果ABS电脑内部没有终端电阻,则可能是CAN总线瘫痪了。
ABS电脑的电源可能会出现故障,因为ASB电脑的电源有故障,那么ABS电脑就无法正常开机工作,所以电脑无法通信。
ABS电脑本身故障,如果电源是完好的,总线也是完好的,则ABS电脑本身故障。
下面看一下准确的检修捕捉步骤:根据电路图检查电脑的电源部分,如果有故障修复即可。
根据电路图找到电脑的总线,然后拔掉插头测量CAN-H和CAN-L的电压,看是否在合理范围内。
一般只会得到以下两个结果:正常的;一根线没有电压,另一根线正常,或者两根线都没有电压,没有电压的即开路。
如果确定了电脑的电源是完好的,CAN总线电压也是合理的,此时便可以更换电脑了。
02总线瘫痪检修总线瘫痪就是总线上所有的模块都不能通信了,且是持久不能通信,不是偶发的。
大众POLO轿车CAN-BUS系统概述与故障检修

科技信 息
0机械 与电子o
S I N E&T C N OG F R T O CE C E H OL大 O O 车C NB S 统 述 故 检 众P L 轿 A —U 系 概 与 障 修
李鹏 伟 魏 虹 f 西安汽 车 科技职 业 学院 陕西 西 安
TheVok wa e sPOLO rCAN- l s g n" Ca BUS S se a ou ls o tn y tm nd Tr be h o ig
LI Pe - i 、 IHo ng we ^ ng
( i nAuoT c n lg ct n l H g, i nS a n i 10 8 X ' t e h ooyVoai a e e x h a x, 0 3 ) a o Co a 7
0 引言
防抱死 E U 安全气囊 E U 空调 E U 车窗 E U等等。这些 E U不 1 0 bs C、 C、 C、 C C 0 k /。 是独立存在的 , 相互之间是有信息通信。 如果采用点对点的通信方式 , A — U E U越多 , C 每个 E U的通信端 口就越多 . C 线束会随之增加 。这样会造 1 C N B S系统概述 成很多 问题 . 如成本增 加 , 线束 占用更 大的空 间. 布置 不方便 , 可靠性 1 c N B S的系统特点 . 1 A —U 降低 . 维修不便等 C N是 IO国际标准化组织 的串行通信协议 . A S 具有 突出的可靠
CAN总线系统的故障诊断与维修

阻是否正常。
4)将一个带有终端电阻控制单元的插头拔下来,检测总阻值是
否发生变化。此时终端阻值会发生变化,若测量的阻值没有发生
变化,说明系统中存在问题,即被拔下的控制单元的终端电阻可
能损坏或者是CAN总线出现断路。如果在拔下控制单元后显示的
阻值为无穷大,那么可判定为连接中的控制单元终端电阻损坏,
或者是到该控制单元的CAN总线出现故障。
20
CAN总线系统的故障诊断与维修-项目实施
二、CAN总线的故障诊断
使用故障诊断仪诊断--诊断流程
1)分析故障原因并进行基本诊断。 2)检查故降诊断代码(DTC),记录输出的代码。 3)清除故障诊断代码(DTC)。 4)通过模拟DTC提示的原始状态(或模拟故障发生的条件)来 生成DTC。 5)再次检查DTC,若DTC出现,则查阅DTC的内容,并根据 DTC提示的内容进行调整、修理或更换;若DTC未出现,则通过 检查电源电路和通信总线、检查各ECU的端子信号、波形分析来 检查故障。 6)排除故障。
9
CAN总线系统的故障诊断与维修
四、CAN总线的数据类型
过载帧
过载帧包括两个域:过载标志、过载界定符。过载标志 由6个“显性”位组成。过载界定符的形式和错误界定符 的形式一样。过载标志被传送后,控制单元就一直监视 总线直到检测到一个从“显性”位到“隐性”位的发送。 此时,总线上的每个控制单元都完成了过载标志的发送, 并开始同时发送7个“隐性”位。
五、CAN总线的基本组成
12
CAN总线系统的故障诊断与维修
五、CAN总线的基本组成
CAN控制器
CAN控制器由接口管理逻辑电路、发送缓冲器、验收过 滤器、接收缓冲器、CAN核心模块等组成,主要用来接 收在控制单元微处理器中的数据,处理数据并传送给 CAN收发器;同时也接受CAN收发器的数据,处理数据 并传送给微处理器。控制功能包含数据发送、时间控制、 数据接收控制、数据格式转换等。
CAN-BUS系统引起的漏电故障

CAN-BUS系统引起的漏电故障就最近几年汽车维修的趋势,越来越多的车普遍性的搭载了CAN、LIN、MOST、Flexray ,多路传输等等总线,同时由于车身控制系统的集成化,复杂化,造成车辆漏电,放电等一系列故障越来越多,越来越频繁。
本文结合笔者一些日常的维修经验和资料收集,说下我对汽车漏电的一些诊断技巧。
文化水平有限,不对之处。
敬请点评,转载的。
打招呼再拿走。
电控系统的休眠(Standby)模式,是指在发动机熄火一段时间后,整车自动进入一种用电量非常小的状态,因而也称为“低能耗模式”。
一般来说,当汽车锁上车门35s以后,或者未锁车门不进行任何操作10min以后,系统自动进入休眠状态,此时数据总线系统由运行电流150mA转为休眠电流6~8mA,给电子防盗系统供电。
当网关接收到打开任一车门、发动机盖、后备厢盖或者操作遥控器的信号时,数据总线系统将结束休眠模式,系统内所有的控制单元被唤醒,唤醒电流大约为700mA。
汽车电控系统设置休眠模式的目的,一是减少在点火开关关闭以后蓄电池电能的无谓消耗,使蓄电池经常保持充足的电量:二是当CAN多路数据传输系统中某个控制单元出现故障时,不至因“寄生电流”过大而引起蓄电池亏电。
电控系统休眠模式的“魔力”来源于多路数据传输系统网关(BSI、智能服务器)的软件设置,休眠模式所有的控制过程都是在CAN网络内不动声色地进行着。
需要说明的是,休眠模式仅存在于CAN舒适总线和信息娱乐总线,动力总线系统不具有休眠模式。
导致舒适总线和信息娱乐总线无法进入休眠状态的常见原因有以下几方面(以大众车系为例)。
1.多路数据传输系统线束折断;2.车载电源控制单元(J519)的插接器接触不良;3.舒适系统控制单元(J393)发生故障;4.车门控制单元有问题;5.风扇控制单元失常;6.发动机ECU主继电器等继电器工作异常(如触点粘连、非正常吸合);7.行李厢灯、杂物箱灯等隐蔽处的照明灯损坏或者常亮;8.导线的绝缘损坏,引起短路。
CAN BUS
在信息数据列中有11位的状态区,这11位二进制中 前7位既是发送信息的控制器标识符,同时又表示 了它的优先级,即从前往后数,前面零越多,优先 级越高。而后4位则是这个控制器发送不同信息的 编号,如发动机控制单元既要发送转速信号,又要 发送水温等信号,则后4位就有所不同。
CAN-BUS系统
Canbus系统的难题-发送和接受的同步
广播原理:一家发送,大家接 收
CAN-BUS系统
CAN-BUS系统组成:
CAN收发器: 安装在控制器内部,同时兼具接受和发送的功能,将控制器传来的数据化为 电 信号并将其送入数据传输线。 数据传输终端:是一个电阻,防止数据在线端被反射,以回声的形式返回,影响数据的传 输。 数据传输线:双向数据线,由高低双绞线组成。
针脚号 1 4 5 6 7 14 15 16 对应的线束 15号线 接地 接地 CANBUS(高) k线 CANBUS(低) L线 30号线
注:未标明的针脚号暂未使用。
CAN-BUS系统
Canbus上的信息 Canbus上的信息是以二进制形式出现的 。也就是说控制单元将信息转换成二进制 ,Canbus用电平来模拟二进制,接受控 制单元将电平转换成二进制数据,再将二 进制数据转换成正常数据。
CAN-BUS系统
CAN 诊断
CAN 信息
CAN 驱动 CAN 舒适 CAN 仪表
CAN-BUS系统
CAN-区域图
诊断接口 网关
发动机
变速箱
ABS J104
ESP传 感器
J533
雨括器 L
安全气囊 J234
G85
电动转向 J500 转向柱 J527
收音机
车载电话
雨括器 R
J519
CAN-BUS多路信息传输系统故障分析及检测
现故 障 ( 通信 线路短 路 、 如 断路及 线路 物理性 质引起 的通信信 号衰 减或 失真 ) , 时 都会 引起 多个 电控单元
无 法工作 或 电控 系统 错误 动作 。判 断方法是 采用示 波 器或 汽车专用 光纤 诊断 仪来 观察通 信数据 信号是 否 与标准 通信数 据信 号相 符 。另 外 , 系统不稳 定 时 , 使用 故 障检测仪 可测 出关 于总线 的故 障码 。
线 系统 的检测 。先读 取控 制单 元 内的故 障码 。如 图 2所示 , 如果 控制 单元 1 与控 制单 元 2和控 制单元 3
公 汽 lc in H i h y 路 tmo i e g wa s& Au与 tv 运 to s o App ia
3 4
第 5 期
20 0 8年 9月
公 路 与 汽 运
总 第 1 8期 2
Hih y g wa s& Au o tv tmo i e App ia in lc to s
3 3
C — US多路 信 息传 输 系统故 障分 析 及 检 测 AN B
陈建 国 , 亚平 韩
( 河北 交通 职 ቤተ መጻሕፍቲ ባይዱ 技 术 学 院 ,河 北 石 家庄 009 ) 5 0 1
1 3 节点 故障 .
地短 路 。如 果数 据总 线无故 障 , 换较 易拆 下 ( 更 或较 便宜) 的一个 控 制单 元 试 一 下 。如 果 数 据 总线 系统 仍 不 能正常 工作 , 换 另一个 控制 单元 。 更
节 点 是 汽车 多 路信 息 传输 系统 中 的 电控模 块 , 节 点故 障就 是 电 控 模 块 E M 的 故 障 , 括 软 件 故 C 包 障和硬 件故 障 。软件故 障 即传 输 协议或 软件 程序有 缺 陷或 冲突 , 导致 汽 车 多路 信 息 传输 系 统 通 信混 乱 或 无法 工作 。这种 故障 一般成 批 出现 , 无法 维修 。 且 硬 件故 障主要 是通 信 芯 片 或集 成 电路 故 障 , 将 造 也
CAN-bus总线错误及故障处理 V1[1].20
![CAN-bus总线错误及故障处理 V1[1].20](https://img.taocdn.com/s3/m/8b1819ec856a561252d36f40.png)
五种错误检测机制 错误标记及错误计数 错误帧及超载帧 错误等级划分 主动错误模式及被动错误模式 总线关闭模式 常见总线故障的硬件与软件处理
广州致远电子
专注的力量成就梦想
谢谢!
广州致远电子
广州致远电子专注的力量成就梦想 Nhomakorabea超载帧
超载帧
当控制器未能足够快地处理当前的信息时将发送 超载帧中断其他发送控制器发送过程以减缓发 送速度,加长发送帧间隔
组成
由超载标志场及 超载界定场组成
广州致远电子
专注的力量成就梦想
广州致远电子
专注的力量成就梦想
主动错误模式及被动错误模式
被动错误模式
当控制器错误计数超越错误警告限制时进入被 动错误模式(消极错误模式)
仅能发送错误认可标志,错误计数仍旧生效, 但不会破坏总线
广州致远电子
专注的力量成就梦想
总线关闭模式
错误标记及错误计数
错误计数
1. 每监测到一个接收错误其错误计数加1
2. 每监测到一个发送错误其错误计数加8,发送 错误更容易被察觉到
SJA1000相关寄存器介绍
1. error warning limit register 2. RX error counter register 3. TX error counter register
总线关闭模式,任意一个错误计数器超越 255导致控制器进入总线关闭模式
1. 持久的总线故障将导致总线关闭
2. 在总线故障清除,控制器检测到总线上连续 的11位隐性位发生128次后,总线关闭的节点 将返回到错误激活状态,错误寄存器状态清 零
广州致远电子
专注的力量成就梦想
经典CAN总线错误分析与解决方案

经典CAN总线错误分析与解决方案1、(CAN)总线的常见故障CAN总线错误分析与解决当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常,车辆无法启动,启动后无法熄灭,车辆动力性能下降,某些电控系统功能失等。
这是因为相关数据或(信息)是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个(网络)系统瘫痪。
最为常见的故障症状是仪表板的显示异常,如下图所示。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断,根据诊断结果制定相关检修方案,做到心中有数,目标明确。
接着查找具体的故障部位和原因,同时结合相应的(检测)方法和测量结果找到故障点,从而彻底排除故障。
由于CAN网络采用多种协议,每个控制模块的(端口)在正常的情况下都有标准电压,因此电压测量法可用于判断线路是否有对地或(电源)短路、相线间短路等问题。
为了确定CAN H 或CAN L 导线是否损坏或(信号)是否正常,可以测量其对地电压(平均电压)。
测量点通常在OBD 诊断(接口)处,如下图所示。
诊断接口的6号针脚连接CAN H 导线,14号针脚连接CAN L 导线。
如果诊断接口上连接有两组CAN总线,那么动力CAN总线使用6号和14号针脚,舒适总线使用3号和11号针脚。
诊断接口的针脚含义如下图所示。
正常情况下,当CAN总线唤醒后,CAN H 对地电压约为2.656V,CAN L 对地电压约为2.319V,而且两者相加为4.975V▼正常的CAN H 电压正常的CAN L 电压CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反。
2、CAN H与CAN L短路当CAN H 与CAN L 短路时,CAN网络会关闭,无法再进行(通信)。
会有相应的网络故障码。
CAN H 与CAN L 短路的总线波形如下图所示。
当两者相互短路之后,CAN电压电位置于隐性电压值(约2.5V)。
CAN BUS汽车多路信息传输系统故障原因及检修
CAN BUS汽车多路信息传输系统故障原因及检修汽车多路信息传输系统故障的原因一般有三种:一是汽车电源系统引起的故障;二是汽车多路信息传输系统的链路故障;三是汽车多路信息传输系统的节点故障。
1.汽车电源系统故障引起的汽车多路信息传输系统故障汽车多路信息传输系统的核心部分是含有通讯IC芯片的电控模块ECM,电控模块ECM的正常工作电压在10.5~15.0V的范围内。
如果汽车电源系统提供的工作电压低于该值,就会造成一些对工作电压要求高的电控模块ECM出现短暂的停止工作,从而使整个汽车多路信息传输系统出现短暂的无法通讯。
这种现象就如同用微机故障诊断仪在未起动发动机时就已经设定好要检测的传感器界面,当发动机起动时,往往微机故障诊断仪又回到初始界面。
2.节点故障节点是汽车多路信息传输系统中的电控模块,因此节点故障就是电控模块ECM的故障。
它包括软件故障即传输协议或软件程序有缺陷或冲突,从而使汽车多路信息传输系统通讯出现混乱或无法工作,这种故障一般成批出现,且无法维修。
硬件故障一般由于通讯芯片或集成电路故障,造成汽车多路信息传输系统无法正常工作。
对于采用低版本信息传输协议回点到点信息传输协议的汽车多路信息传输系统,如果有节点故障,将出现整个汽车多路信息传输系统无法工作。
3.链路故障当汽车多路信息传输系统的链路(或通讯线路)出现故障时,如;通讯线路的短路、断路以及线路物理性质引起的通讯信号衰减或失真,都会引起多个电控单元无法工作或电控系统错误动作。
判断是否为链路故障时,一般采用示波器或汽车专用光纤诊断仪来观察通讯数据信号是否与标准通讯数据信号相符。
通过对以上三种汽车多路信息传输系统故障的分析,可以总结出该系统一般诊断步骤为:4.1了解该车型的汽车多路传输系统特点(包括:传输介质、几种子网及汽车多路信息传输系统的结构形式等)。
4.2汽车多路信息传输系统的功能,如:有无唤醒功能和休眠功能等。
4.3检查汽车电源系统是否存在故障,如:交流发电机的输出波形是否正常(若不正常将导致信号干扰等故障)等。
浅析公交客车CAN总线动力网常见故障及排除方法

浅析公交客车总线动力网常见故障及排除方法李跃华公交保修一厂[摘要]随着公交客车的飞速发展,一些关键技术已达到了国际水平。
这就迫切要求客车使用和我们维修人员更新观念,尤其近几年总线技术被大量运用于公交客车。
其分为动力总线控制网络(高速总线);多媒体总线控制网络(中速总线);车身总线控制网络(低速总线)三部分。
为了适应总线维修需要,在我们大脑中要形成一种空间网络的概念,形成一个车辆的控制局域网。
在以理论为基础,实践相结合,对动力网的一些常见故障加以剖析、分解。
合理的将网络故障引起的客车问题排除掉。
[关键词]公交客车;总线;动力网络;维修.转变维修理念,跟上时代发展随着现代公交客车的飞速发展无论从原理、结构上,还是客车的使用与维修上均与传统客车有着很大的区别。
传统的客车电路维修方法已远远不能适应客车总线的发展,因此迫切要求客车使用和我们维修人员更新观念,主动来适应客车总线维修的需要。
显然,常见故障检修与排除方法分析是一种快速掌握客车总线维修技术的很好途径。
我根据这两年的实践和理论基础对一些总线常见故障及排除方法加以分析,为自己今后分析总线问题、解决问题的思路和方法奠定了良好的基础。
客车总线故障虽然不像传统客车电路故障一目了然,但仍有规律可循,只要依据其基本工作原理,按照一定的检测程序去查找故障所在,问题便迎刃而解。
为了使自身快速掌握总线维修技术,达到举一反三、触类旁通的目的,提高分析故障、排除故障的能力。
自己对现在的总线动力总线控制网络(高速总线)常见故障及排除方法进行了主观和片面的一个总结。
.明确概念,掌握网络基本原理动力网络层定义车辆总线分为:动力总线控制网络(高速总线);多媒体总线控制网络(中速总线);车身总线控制网络(低速总线)三部分。
我所说的总线系统是目前北京公交客车普遍采用的动力总线控制网络(高速总线)和哈尔滨威帝开发的三级车身总线控制网络(低速总线)系统,加以剖析。
目前公交客车采用的哈尔滨威帝开发的三级总线,采用协议。
汽车 CAN—BUS总线故障及波形分析
汽车 CAN—BUS总线故障及波形分析作者:逯海燕来源:《时代汽车》2016年第09期摘要:目前,随着电子科技及先进技术的逐步提高,汽车已不只是交通工具,同时承担着更多的功能。
现代科技已将信息娱乐、个人通信电子装置、多媒体、网络、无线连接等功能整合到汽车内部,为乘客提供了前所未有的舒适和便利,这一切都有赖于汽车网络信息通信技术。
本文介绍了汽车 CAN-Bus总线的基本情况,对典型车辆常见的车载网络系统出现的故障做了详细的分析。
关键词:CAN-Bus系统;车载网络系统;故障1 前言 [1-2]当前汽车技术已经发展到第四代,即计算机技术、电子技术、综合控制技术、智能传感器技术等先进汽车电子技术。
现代汽车的电子结构是通过几种通信系统将微控制器、传感器和执行器连接起来的,汽车电控单元已不再是线束连接,而是网络系统连接起来的。
因此,网络信息通信技术的引入是汽车电子技术发展的里程碑。
现代汽车中电子设备比比皆是,涉及汽车的主要部件,基本上可分为三类:动力电子系统、底盘电子系统、车上电子系统。
而车用信息通信系统,即Telematics也将会成为汽车电子系统的重要组成部分。
2 CAN总线基本知识 [3-4]CAN(Controller Area Network)是控制单元(ECU)通过网络进行数据交换的一种通信方式,即控制器局域网络。
是国际上应用最广泛的现场总线之一。
2.1 CAN总线在汽车上应用的原因随着汽车工业的发展,现代汽车使用的电子控制系统和通信系统越来越多,如安全气囊(SRS)、发动机电控系统、防抱死制动系统(ABS)、自动变速器控制系统、自动巡航系统(ACC)舒适系统和信息娱乐系统等。
各个系统、系统和组合仪表、系统和诊断接口之间均需要进行数据交换,如此巨大的数据交换量,如仍采用导线进行点对点的连接传输方式将会面临各种困难。
因此,用网络信息通信传输系统取而代之就成为必然的选择。
主要表现为:(1)人们对车辆安全性和舒适性要求的逐步提高,以及各国对排放的限制和对环保的重视;(2)现代车辆上都安装了越来越多的电器部件(控制单元/传感器/执行元件);(3)电控单元 /电子元部件间需要进行适时高速大量的信息交换,同时要保证数据传输时较高的安全性及可靠性;(4)此外,数据总线技术在车上的应用,减少连接插头尺寸即减小控制单元尺寸,增大安装空间;可以降低车辆自重:减少线束数量从而减轻了重量,降低成本及故障诊断时的复杂程度。
高速CAN-BUS的故障与检修

重点难点
重点
重点难点(Important and difficult)
1 2 3 4
CAN数据总线系统的分类 CAN数据总线组成结构 CAN数据传输 高速CAN-BUS故障检修
难点 1 2
CAN数据传输
高速CAN-BUS故障检修
知识脉络图
• •
CAN控制器 传CAN收发器 数据传递终端 CAN数据总线
应用拓展
思考与练习
Reflections and Practice
一、填空题
1.高速CAN-BUS主要应用在一些要求高实时性的系统中,如 、
1
填空题
等。 2.CAN数据总线中,每个连接在CAN总线上的节点内部都安装了一个CAN 形成 和 共同组成。 、 、数据接收控制、数据格式转换等。 和 数据线 、一个CAN 、两条数据传递线
2 判断题 络上的其他节点发送信息,所有节点不分主次,通信方式灵活。( ) 5.CAN-BUS网络上的各个节点信息分成不同的优先级,可以满足不同的实时要求,高优先级的 3 简答题 信息优先传递。( )
6.如果总线上的电平信号处于静止位置,就称为显性电平(或叫有源)。( )
7.CAN数据总线在极短的时间里,在各控制单元间传递数据,数据的传输以帧为最小单位,每帧 数据包含7个部分。( ) 8.一般说来,引起汽车车载网络系统故障的原因有三种:一是汽车电源系统引起的故障;二是汽
课前进行知识回顾,内容有二:
电控换气系统包括空气供给系统、进气控制系统、排气控制系统。
电控换气系统的故障检修内容包括元器件拆装、数据流检测及通过故障特征来检测和排 除故障的过程与方法。
知识一
知识二
项目目标
知识 目标
项目目标(Project Objectives)
汽车总线CANBUS的保护设计详解

汽车总线CANBUS的保护设计详解汽车总线CAN BUS(Controller Area Network)是一项常用于汽车电子系统的通信协议,它允许车辆中的不同电子控制单元(ECU)之间实现高速的通信和数据共享。
由于CAN BUS在车辆中很重要,因此设计时需要采取一系列保护措施,以确保其可靠性和稳定性。
首先,CANBUS需要保护电路免受电磁干扰的影响。
电磁干扰可能来自于汽车电源线、引擎点火系统、可变速驱动器和其他电子设备。
为了降低电磁干扰的影响,可以使用滤波器来抑制高频噪声。
滤波器的类型可以根据具体需求选择,包括低通滤波器、带通滤波器和带阻滤波器等。
其次,CANBUS也需要保护电路免受过电压和过电流的影响。
过电压和过电流可能是由于车辆电源系统故障、短路或电路不当设计而引起的。
为了防止这种情况发生,可以使用保险丝、电压稳压器和过压保护电路。
保险丝能够在过电流时切断电路,保护CANBUS电路不受损害。
电压稳压器可以将不稳定的电压转换为稳定的电压,确保CANBUS电路正常工作。
过压保护电路则能够防止过高的电压进入CANBUS电路,保护其不受到损坏。
此外,还需要保护CANBUS免受短路和开路的影响。
短路可能是由于线束损坏、连接错误或ECU故障引起的。
为了防止短路对CANBUS产生影响,可以在线路上安装保护器件,如短路保护二极管。
这些保护器件能够在短路时切断电路,以保护CANBUS免受损坏。
另外,开路也可能导致CANBUS通信失败。
为了检测开路情况,可以将终端电阻安装在CANBUS线路的两端,通过检测线路上的信号电平变化来判断是否存在开路。
此外,对于CANBUS的保护设计还应考虑到防止恶意攻击和网络安全问题。
由于CANBUS是一种共享总线通信系统,没有加密或身份验证机制,因此可能受到恶意攻击者的攻击。
为了提高CANBUS的安全性,可以使用防火墙、加密算法和认证机制来保护CANBUS免受未经授权的访问和篡改。
汽车CAN-BUS 系统的故障诊断技术分析
10.16638/ki.1671-7988.2020.23.057汽车CAN-BUS系统的故障诊断技术分析张洲,郭阳阳(武汉职业技术学院,湖北武汉430074)摘要:汽车CAN-BUS系统近些年来在汽车通信行业的使用与普及越来越广泛,依靠其系统的可依赖性、可交互性、灵动性强和实时检测等优势,在汽车硬件装备的升级与软件系统的运行中起到了至关重要的作用。
文章针对汽车CAN-BUS的故障诊断技术的发展与应用分析提出几方面粗浅的分析与见解,以供参考。
关键词:汽车CAN-BUS系统;波形分析;故障排查中图分类号:U472.4 文献标识码:B 文章编号:1671-7988(2020)23-181-03Analysis of Fault Diagnosis Technology of Automobile CAN-BUS SystemZhang Zhou, Guo Yangyang( Wuhan V ocational and Technical College, Hubei Wuhan 430074 )Abstract: In recent years, the use and popularization of automotive CAN-BUS systems in the automotive communication industry have become more and more widespread. Relying on the advantages of the system's reliability, interactivity, flexibility and real-time detection, it has been upgraded in automotive hardware equipment. Played a vital role in the operation of the software system. This article puts forward several superficial analysis and insights for the development and application analysis of automobile CAN-BUS fault diagnosis technology for reference.Keywords: Automotive CAN-BUS system; Waveform analysis; TroubleshootingCLC NO.: U472.4 Document Code: B Article ID: 1671-7988(2020)23-181-031 引言汽车CAN-BUS系统是汽车行业发展至今在车内控电技术的发展取得的产物,它的应用与广泛地投入与实践中,使得汽车电控系统发生了翻天覆地的改变,提高了汽电体统的安全性与稳定性。
汽车CAN—BUS电路常见故障排除
之一 。 C A N — B U S总线是为了解决现代汽车 中众多电控模块 ( E C U) 之 间的数据交换而开发 的一种 串行数据总线 。数据总线是模块之 4 ) 模块内部芯片一定要 防止静 电击穿 。 间运行数据的公共通道 ,它将各个功能部件 的 E C U连在一起 , 大 5 ) 模块 内的 自恢复保 险是根据 每个接 口的负 载功 率 , 设 置不 量 的数据信息和控制信息在总线上流动 , 实现各功能部件的 E C U 同的安培值 , 所 以不能随便增加某个输 出接 口的负载 。 之间 的信息交换 。 6 ) 不能将负载导线 长时间接地 。 1 . 2 C AN — B U S 总线 网络数据传输分为三类 。 A类 一 L I N传输数据 7 ) 在断开蓄电池连线或 电控单元连线之前应关断电源开关。 8 ) 在检 测充 电系统时 , 如果点火 开关 闭合 、 发动 机工作 时千 数 率小 于 1 0 K b p s 是属 于汽车 低层 网络 协议 范畴 ,定 位于低 于 C A N — B U S总 线 网 络 的 通 信 层 ,一 般 使 用 单 线 连 接 。 B类 万不要拆卸蓄电池连线。
民营 科技2 0 1 5 年第1 1 期
科技 论坛
汽车 C A N — B U S电路常 见故障排 除
郭建 习 马 士 恩 ( 甘 肃 省 庆 阳市 陇 东职 业 中专 , 甘肃 庆阳 7 4 5 0 0 2 )
摘 要: 电子控 制技 术和各种 电子设备在现代 车辆上 的应 用已经随处可见 , 由于 电控技术和 电子设施 的增加 , 为 了节省成本 和便 于众 多电控模块之 间相 互联 系而使 用 C A N — B U S总线 , 随着车辆使 用时间的增加汽车 电路方面的故障越 来越 多。排 除和预防线路 常见
凯美瑞车CAN-BUS故障排除
凯美瑞车CAN-BUS故障排除随着汽车电子技术的不断发展,CAN-BUS已经成为现代汽车电子系统中最常见的网络类型,其可以在车辆的各个部分之间传递信号和控制命令。
在凯美瑞车辆中,车CAN-BUS被广泛应用于整车诊断和控制系统中。
但是,随着车龄的增加和使用情况的不同,CAN-BUS也可能出现故障。
本文将为您介绍凯美瑞车CAN-BUS故障的排除方法。
首先,对凯美瑞车CAN-BUS故障进行诊断非常重要。
如果您的车辆出现了故障现象,例如发动机灯亮,仪表板出现错误码等情况,建议您使用汽车诊断仪进行故障读取和分析,以确定故障出现的具体位置和原因。
如果您不具备诊断仪或不确定如何使用它,建议您到专业的汽车维修厂进行检查和修理。
其次,凯美瑞车CAN-BUS故障的常见原因有很多,例如传感器故障、线路故障、控制模块故障等。
针对不同的故障原因,我们需要采取不同的排除方法。
例如,如果传感器故障,可以先对传感器引线进行检查和清理;如果线路故障,可以检查线路连接是否良好,并检查电路电源是否正常;如果控制模块故障,可以尝试进行控制模块复位或更换控制模块等。
最后,为了保障凯美瑞车CAN-BUS的正常工作,我们需要注意以下几点:首先是日常保养。
建议车主每隔一段时间进行一次全面的保养,包括量程、清洗和检查钢丝绳,以确保电路、电器和电池的正常运转。
其次是规范行车习惯。
车主在日常行驶中应尽可能规范自己的行车习惯,尽量避免剧烈操作,保证车辆的安全和可靠性。
最后是及时维修。
如果车主发现车辆出现了任何异常现象或故障,应及时到专业的汽车维修厂进行检查和维修,以避免故障进一步扩大或导致车辆安全事故。
总之,凯美瑞车CAN-BUS故障的排除需要我们在日常使用中格外重视。
只有保障车辆的正常运行,才能让我们更加安全和舒适地驾驶汽车。
凯美瑞车CAN-BUS故障排除需要根据具体的故障原因以及车主的实际情况来进行。
在排除故障时,另外一个非常重要的因素就是作为车主你需要有一定的认知,比如说可以看一看故障代码,不要随便拿着手工具乱动引擎,需要更换配件时一定要购买原厂配件等等。
浅析汽车起动机不运转之CAN-BUS故障的诊断
第22卷第6期辽宁省交通咼等专科学校学报Vol. 22 No. 62 0 2 0 年 12 月 JOURNAL OF LIAONING PROVINCIAL COLLEGE OF COMMUNICATIONSDec. 2 ° 2 0文章编号:1008-3812(2020)06-023-03浅析汽车起动机不运转之CAN-BUS 故障的诊断修玲玲(辽宁省交通高等专科学校,辽宁沈阳110122)摘 要 CAN-BUS 是汽车上的重要局域网络,CAN-BUS 出现故障,会导致车辆无法正常工作甚至无法起动,正确的故障诊断流程是快速有效排除故障的保证。
以迈腾轿车起动机不转故障的案例,浅析汽车起动机不转之驱动CAN-BUS 故障的诊断与排除流程,可给汽车维修专业学生和汽车维修企业提供诊断流程借鉴。
关键词 起动机;不运转;CAN-BUS :故障诊断中图分类号:U464.142汽车在使用过程中,发动机无法起动是常见 的故障之一。
发动机无法起动可以归为两大类,—类是起动机不运转,另一类是起动机运转、但 发动机无法起动。
若是起动机不运转,则属于起动系统存在故障,有可能是起动机本身的故障、起动机电源故障、或者起动机控制部分故障。
若 起动机运转而发动机无法起动,则有可能是点火系统故障、燃油供给系统故障等等。
文章以起动机不运转为例,介绍CAN-BUS 故障的诊断流程。
1 CAN-BUS 简介CAN (Controller Area Network ),控制单元 局域网,用于汽车上控制单元的信息传递,一方面减少了车上的布线,另一方面保证了信息传输 的可靠性,现在的大部分汽车都有CAN-BUS , 按照通信协议、传输速率和所用控制单元的不同,有驱动CAN-BUS 、舒适CAN-BUS 和信息娱乐CAN-BUS 。
⑴CAN-BUS 一旦出现故障, 会导致CAN-BUS 上的控制单元无法进行信息传递,在起动系统中,CAN-BUS 出现故障,起动 机的控制线路会无法工作,无法使起动机运转。
导航漏电怎么解决方案
导航漏电怎么解决方案
《导航漏电怎么解决方案》
导航漏电是指导航系统在使用过程中出现漏电现象,导致设备无法正常工作。
这种问题可能由于设备损坏、线路短路或者其他原因引起。
解决导航漏电问题需要仔细检查设备和线路,找出问题根源并采取相应的解决方案。
首先,当发现导航系统出现漏电问题时,应该立即停止使用该设备,并断开电源。
然后,可以通过以下几种方法来解决导航漏电问题:
1. 更换电源线:有时候导航系统的电源线可能破损或老化,导致漏电问题。
这时可以先尝试更换新的电源线,确保连接牢固、无损坏。
2. 检查设备损坏:有时候导航系统本身可能出现故障或损坏,导致漏电现象。
这时可以将设备送至专业维修点进行检测和维修。
3. 检查线路:有时候导航系统的线路可能短路或接触不良,导致漏电问题。
这时可以仔细检查线路,确认连接是否牢固,是否有损坏和短路现象,及时进行修复。
4. 防漏电插座:对于长期出现漏电问题的导航设备,可以考虑安装防漏电插座来保护设备和用户的安全。
总的来说,解决导航系统漏电问题需要综合考虑设备、线路和电源等多方面因素,找出问题的根源并采取相应的解决方案。
在操作过程中,一定要注意安全和谨慎,避免因操作不当而导致更大的安全隐患。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAN-BUS系统引起的漏电故障就最近几年汽车维修的趋势,越来越多的车普遍性的搭载了CAN、LIN、MOST、Flexray ,多路传输等等总线,同时由于车身控制系统的集成化,复杂化,造成车辆漏电,放电等一系列故障越来越多,越来越频繁。
本文结合笔者一些日常的维修经验和资料收集,说下我对汽车漏电的一些诊断技巧。
文化水平有限,不对之处。
敬请点评,转载的。
打招呼再拿走。
电控系统的休眠(Standby)模式,是指在发动机熄火一段时间后,整车自动进入一种用电量非常小的状态,因而也称为“低能耗模式”。
一般来说,当汽车锁上车门35s以后,或者未锁车门不进行任何操作10min以后,系统自动进入休眠状态,此时数据总线系统由运行电流150mA转为休眠电流6~8mA,给电子防盗系统供电。
当网关接收到打开任一车门、发动机盖、后备厢盖或者操作遥控器的信号时,数据总线系统将结束休眠模式,系统内所有的控制单元被唤醒,唤醒电流大约为700mA。
汽车电控系统设置休眠模式的目的,一是减少在点火开关关闭以后蓄电池电能的无谓消耗,使蓄电池经常保持充足的电量:二是当CAN多路数据传输系统中某个控制单元出现故障时,不至因“寄生电流”过大而引起蓄电池亏电。
电控系统休眠模式的“魔力”来源于多路数据传输系统网关(BSI、智能服务器)的软件设置,休眠模式所有的控制过程都是在CAN网络内不动声色地进行着。
需要说明的是,休眠模式仅存在于CAN舒适总线和信息娱乐总线,动力总线系统不具有休眠模式。
导致舒适总线和信息娱乐总线无法进入休眠状态的常见原因有以下几方面(以大众车系为例)。
1.多路数据传输系统线束折断;2.车载电源控制单元(J519)的插接器接触不良;3.舒适系统控制单元(J393)发生故障;4.车门控制单元有问题;5.风扇控制单元失常;6.发动机ECU主继电器等继电器工作异常(如触点粘连、非正常吸合);7.行李厢灯、杂物箱灯等隐蔽处的照明灯损坏或者常亮;8.导线的绝缘损坏,引起短路。
二、休眠模式的进入、终止与唤醒1.进入休眠模式当关闭点火开关和其他用电器开关(除车门锁按钮开关外),再关闭驾驶侧车门(目的是消除电动车窗升降控制系统中的点火钥匙拔出定时器信号,同时确认车外灯熄灭),1min 内如果不再操作车门开关、照明灯开关、发动机舱盖开关、收音机开关、尾灯继电器熔断丝等,则整车电控系统进入休眠状态。
电控系统进入休眠模式后,对于不需要工作的控制单元。
多路数据传输系统将停止其信号传输,以节省蓄电池的电能,但是电子防盗系统仍然需要供电。
2.终止休眠模式在休眠模式下,一旦施加人为的操作(例如开启一侧车门),休眠模式将被终止。
3.唤醒网络当接通点火开关时,原来处于“休眠”状态的CAN多路数据传输系统及相关控制单元被“唤醒”,并立即开始运作。
由此可见,“唤醒”ECU的动力来源于蓄电池的电能。
也就是说,唤醒电源(即信号)来自于点火开关。
如果ECU因故接收不到唤醒电源,发动机将无法启动。
另外,若操作某一个与多路数据传输控制单元相关的开关,该控制单元被“唤醒”,其所有的功能被激活。
能够“唤醒”多路数据传输系统的信号装置包括遥控器以及上述各开关。
接下来,如果再次关闭点火开关,关闭驾驶侧车门或前乘客侧车门,电控系统又将进入休眠模式,如此周而复始。
三、典型车型休眠模式的主要功能1.2011年款大众全新帕萨特轿车的休眠模式(1)15正电再激活功能:15正电关闭以后,动力总线系统有些控制单元仍然需要交换数据,因此在网络内部,用30正电激活15正电,保证在断电以后,数据信息能够正常地传递。
再激活功能的时间为10s到15min。
(2)休眠模式、唤醒模式的监控:当网关监控到舒适和信息娱乐总线处于空闲状态时,网关发出休眠指令,进入休眠模式。
此时数据总线的电压低位线为12V,高位线为0。
如果动力总线处于数据传递过程中,舒适和娱乐总线是不允许进入休眠状态的。
当舒适总线处于数据传递的过程中,娱乐和信息总线也不肯进入休眠模式。
当某一个信号唤醒相应的总线后,网关会激活其他的总线系统。
2.雪铁龙凯旋轿车的休眠模式凯旋轿车的网关(BSI)除了起到CAN多路传输系统的指挥员和协调员的“角色”外,还控制电系的供电分配和进行电路保护。
为此,在BSI中装有保险丝。
这种保险丝的电能来自于蓄电池和点火开关。
为了避免蓄电池因长时间库存而耗尽电能,采用SH保险保证BSI处于低电能消耗状态。
在汽车下线时。
BSI就是设置为这个状态,被称为“库存模式”;在新车准备出售时。
要将SH保险设置在“用户模式”。
凯旋轿车的网关(BSI)具有以下4种状态:(1)“无效”状态:所有由BSI控制的输出装置都处于睡眠状态。
(2)“休眠”状态:没有来自BSM的+APC信号。
(3)“唤醒”状态:所有的功能被激活,尤其是CAN I/S网、CAN舒适网和CAN车身网的多路通信。
(4)“醒来”状态:指从BSI进入唤醒状态到BSI离开唤醒状态之间的这段过程。
四、电控系统休眠模式的检测1.检测多路数据传输系统的电压多路数据传输系统进入休眼模式以后,应该无电压;转入“唤醒”模式以后,应该为标准电压。
以宝马730轿车(装备M54发动机和E66底盘)为例。
该车采用CAN总线传输数据,总线插接器里有3根导线。
其中两根为动力总线PT-CAN(CAN-H和CAN-L),另一根为唤醒总线。
唤醒总线的对地电压应当是蓄电池电压,CAN-H 和CAN-L的对地电压分别为2,6V和2.4V。
如果PT-CAN(动力总线)与唤醒总线短路,将使总线上的各模块之间无法正常传输数据。
并出现多个故障及指示灯点亮现象。
2.检测蓄电池的寄生电流蓄电池的寄生电流一般应在70mA以下,如果电流过大,说明休眠模式已经失效。
例如宝马车系,要求休眠模式下的寄生电流不大于20 mA。
可以连接故障诊断仪GT1,进入Measuring System(测量系统),测量元件数值,就能够检测到蓄电池电压以及休眠模式下的寄生电流等。
3.读取数据流以2011年款途锐轿车为例,连接故障诊断仪,进入19-08-001。
可以阅读到仪表盘唤醒线-数据总线诊断接口的状态(被动式/主动式)、舒适系统总线状态(无读数/总线空闲)、信息娱乐总线状态(无读数/总线空闲)、动力系统总线状态(无读数/总线空闲);进入19-08-002,可以阅读到“运输模式”是激活还是禁用。
4.实行延时检测考虑到驾驶人完成停车、熄火和断开电器开关需要一定的时间等情况。
所以从关闭点火开关到电控系统进入休眠模式中间设置了一个滞后期。
有鉴于此。
休眠模式的检测应当在所有电器停用几分钟之后再进行。
例如宝马745Li轿车(配E66底盘),在所有用电设备停用3min后进入一次休眠,此时起动开关处的红灯熄灭;在所有用电设备停用16min后进入my,休眠。
如果此时起动开关处的红灯仍然点亮,说明还有用电器在耗电。
帕萨特B5轿车的舒适系统控制单元(J393)具备防止放电功能,如果驾驶人忘记关闭舒适系统的某些电器,J393会自动切断其电源,电脑软件设计的断电开始时间为锁闭车门后的2h左右。
又如爱丽舍轿车,它的冷却系统有2个电子风扇,主要受水温控制盒的控制。
在发动机熄火后,如果冷却液温度超过112℃,电子风扇会低速运转。
进行6min的延时冷却,在这段时间内,也要消耗电能。
除此以外,在发动机熄火后,电控单元(ECU)需要驱动怠速步进电机运转,使节气门回到初始位置,以利于下次启动;热线式空气流量传感器的热线在发动机熄火5s后,热线被电流加热,在1s内升温至1000℃,用于烧掉粘附在热线上的杂质。
在这些时间内也需要消耗电能。
总之。
检测寄生电流应当在所有电器停用几分钟之后再进行。
否则容易引起误判。
五、电控系统休眠,唤醒模式典型案例分析1.通过自适应学习,唤醒处于休眠状态的电器高端车型一般装备了大量的用电器,如果有的电器长时间不使用,电能管理系统会自动关闭某些耗电量比较大的电器设备(如后备箱控制系统),使其处于休眠状态。
遇到这种情况,可以连接故障诊断仪,对电控系统进行自适应学习,就能唤醒处于休眠状态的电器,使其投入工作。
一辆大众辉腾轿车,长时间停放以后。
遥控器无法打开后备厢盖。
分析认为,这是由于后备厢控制单元仍然处于“休眠”状态的缘故。
此时可以对后备厢控制单元进行自适应学习,其方法是:①连接VAS5051故障诊断仪;②进入舒适系统的地址码“46”;③选择功能“10”(匹配);④输入通道号“24”,进入后备厢系统自适应界面;⑤选择“SAVE”;⑥输入重新确认数值“0”,并按“ACCEPT”键,此时后备厢开关会模拟开启和关闭的全过程,并且重复执行3次。
这样操作,后备厢控制单元就能被“唤醒”,后备厢就能恢复正常的开启和关闭功能。
2.车辆“运输模式”的启用与关闭以2006款朗逸轿车为例,在商品车运输到经销商之前,为了防止蓄电池过多放电,应当尽量降低汽车的耗电量,为此需要启用运输模式,让电控系统处于休眠状态。
在运输模式下,以下系统不工作(即功能被关闭):收音机、遥控功能、内部监控系统、驻车加热、倾斜传感器、内部照明灯、车门上的二极管防盗指示灯等。
在汽车销售给用户之前,必须使用诊断仪器VAS5052和工具VAS5052/6A关闭运输模式。
即进入19-08-002。
就可以关闭运输模式。
“运输模式”关闭以后,汽车的电能管理系统恢复正常。
如果汽车的行驶里程达到150km,系统将自动关闭运输模式,并且此模式不能再激活。
3.网线断路引起休眠模式失效一辆2008年款领域轿车,停放2天后难以启动,仪表盘上没有任何指示灯报警。
怀疑系统漏电,于是在静止状态下测量蓄电池的放电电流,达到1.05A(标准值为小于50mA)。
连接故障诊断仪VAS5052进行检测。
读到一个故障码“00470”,其含义是单线组合舒适系统数据总线断路。
选择故障诊断仪的“引导性查询功能”,查询CAN总线的数据流。
在正常情况下,关闭点火开关,等待大约1min,由于网关休眠。
第1区(唤醒总线状态)的结果应为“被动”,第2区(舒适总线)、第3区(信息娱乐总线)和第4区(动力总线)都应为“CAN总线休眠”。
但是故障车点火开关关闭1 min后的测量结果却为:第1区显示为“主动”,说明CAN总线没有休眠;第2区(舒适总线)、第3区(信息娱乐总线)显示为空白。
说明舒适总线和信息娱乐总线没有休眠;第4区(动力总线)显示为传输休眠,说明动力总线正常。
为了进一步判断舒适总线和信息娱乐总线没有休眠的原因。
再次利用故障诊断仪的“引导性查询功能”,查看舒适总线和信息娱乐总线的数据流,结果如表1。
从表1中看出,第2区所示的“乘客侧车门导线”后面没有显示(若后面显示“1”,表示连接正常;后面无显示。
表示连接不正常;后面显示“单线”,表示1根导线断路;后面显示“S”,表示休眠模式已设置),说明乘客侧车门上的舒适总线连接不正常。