PID技术交流
浅谈光伏组件的PID现象和解决方案

浅谈光伏组件的PID现象和解决方案摘要:PID最早是Sunpower在2005年发现的。
组件长期在高电压作用下使得玻璃、封装材料之间存在漏电流,大量电荷聚集在电池片表面,使得电池片表面的钝化效果恶化,导致FF、Isc、Voc降低,使组件性能低于设计标准。
在2010年,NREL和Solon证实了无论组件采用何种技术的p型晶硅电池片,组件在负偏压下都有PID的风险。
关键词:光伏组件;PID现象;解决方案1PID效应的危害和测试方法1.1PID效应的危害PID的作用使PN结中的电子器件受到越来越多的损坏,电池模块的输出功率损失很大,这使得电池模块的填充因子(FF)开路电压和短路容量降低。
在实际工作中,PID实用程序的生成不仅会降低太阳能电站的功率,还会继续降低发电容量。
最高可达50%或更高,降低了太阳能发电厂的盈利能力。
1.2PID测试标准电致发光成像技术(通常称为“El”)是一种操纵和测试太阳能电池控制面板潜在缺陷的方法。
检测应在暗室中进行。
直流电源的正极加载到晶体硅太阳能电池板的正极,并引入不平衡自由电子。
借助于从扩散区域引入的许多不平衡自由电子,电池板被连续复合照明,释放光量子。
面对电池板的CCD摄像机捕捉到该光量子,该光量子经室外电子计算机求解后以图像形式呈现。
图像的色度与少数载流子扩散的长度和电池的电流强度呈正相关。
当图像变暗时,意味着少数载流子扩散越来越短,表明电池模块中存在缺陷。
1.3PID现象的修复方法1.3.1集中式逆变器负极接地在使用500kW以上逆变器的中国地面电站中,采用集中式逆变器负极接地的方法来处理PID损耗。
太阳能组件根据直流电缆接收直流电流收集箱,然后根据直流电缆连接逆变器并将其转换为交流电流。
最后,保护降压变压器根据交流电缆投入运行,并在负极接地。
做好绝缘层,并在逆变器内部结构中进行直流对地故障测试。
当检测到公共接地故障时,将切断公共故障电流,发出公共故障警告数据信号,并切断和关闭具有公共接地故障的蓄电池部件。
单片机电机控制

单片机电机控制引言:单片机作为一种集成电路芯片,广泛应用于各个领域,尤其在电机控制方面发挥着重要作用。
本文将介绍单片机在电机控制中的应用及相关知识,以及常见的控制方法和技术。
一、单片机在电机控制中的应用单片机在电机控制中的应用广泛,包括直流电机控制、步进电机控制、交流电机控制等。
通过单片机的控制,可以实现电机的启停、速度调节、方向控制等功能。
1. 直流电机控制:直流电机是一种常见的电机类型,广泛应用于各个领域。
单片机可以通过PWM信号控制直流电机的转速和方向。
通过改变PWM信号的占空比,可以控制直流电机的速度,通过改变PWM信号的正负脉冲,可以控制直流电机的正转和反转。
2. 步进电机控制:步进电机是一种精密控制的电机,常用于需要准确定位的应用中。
单片机可以通过控制步进电机驱动器的信号,实现步进电机的精确控制。
通过改变驱动器信号的频率和脉冲数,可以控制步进电机的转速和步距。
3. 交流电机控制:交流电机是一种常见的电机类型,广泛应用于各个领域。
单片机可以通过外部电路和传感器,获取交流电机的相关信号,从而实现对交流电机的控制。
常见的控制方法包括矢量控制、电流控制和速度控制等。
二、电机控制的常见方法和技术在单片机电机控制中,常见的方法和技术有PWM调速、PID控制、闭环控制等。
1. PWM调速:PWM调速是一种通过改变PWM信号的占空比来调节电机转速的方法。
通过改变占空比,可以改变电机的平均电压和平均功率,从而实现电机的调速功能。
PWM调速具有调速范围广、控制精度高的优点,在电机控制中被广泛应用。
2. PID控制:PID控制是一种比例、积分和微分控制的方法,常用于对电机速度和位置的控制。
通过测量电机的反馈信号和设定值,PID控制可以根据误差的大小来调整控制器的输出,从而实现电机的精确控制。
3. 闭环控制:闭环控制是一种通过反馈信号来调节电机控制器输出的方法。
通过测量电机的反馈信号,可以实时调整控制器的输出,从而实现对电机的精确控制。
交流电机控制与仿真技术:带你掌握电动车与变频技术核心算法

交流电机控制与仿真技术:带你掌握电动车与变频技术核心算法1. 什么是交流电机控制与仿真技术?交流电机控制与仿真技术是指通过控制理论和仿真技术来实现对交流电机的运行状态、效果的控制和仿真模拟的方法和技术。
交流电机是一种常见的电动机,广泛应用于许多领域,如工业生产、交通工具等。
掌握交流电机控制与仿真技术,可以有效提高交流电机的运行效率和稳定性。
2. 为什么需要交流电机控制与仿真技术?交流电机控制与仿真技术的出现是为了满足市场需求和提高产品和系统的性能。
传统的手动控制方式已经无法满足复杂的生产和运输需求。
借助控制理论和仿真技术,可以通过对交流电机的控制和仿真模拟来提高生产效率、降低能耗、提高产品质量等。
3. 交流电机控制与仿真技术的核心算法有哪些?交流电机控制与仿真技术的核心算法包括速度闭环控制算法、位置闭环控制算法和电流闭环控制算法等。
速度闭环控制算法采用PID控制器对电机的转速进行闭环控制,使电机能够按照设定的速度运行。
位置闭环控制算法利用位置传感器或编码器测量电机的位置,并通过闭环控制算法调整电机的角度或位置。
电流闭环控制算法通过测量电机的电流,利用控制器对电机的电流进行调整,以达到所需的输出功率。
4. 交流电机控制与仿真技术的应用领域有哪些?交流电机控制与仿真技术广泛应用于各个领域,如工业生产、交通工具、家电等。
在工业生产中,交流电机控制与仿真技术可以用于机械设备的自动化控制、生产线的优化等方面,提高生产效率和质量。
在交通工具领域,交流电机控制与仿真技术可以应用于电动汽车、电动自行车等的动力系统控制,提高能源利用效率和行驶稳定性。
在家电领域,交流电机控制与仿真技术可以应用于空调、洗衣机、冰箱等电器的功率控制和运行管理,实现智能化和节能效果。
5. 如何掌握交流电机控制与仿真技术?要掌握交流电机控制与仿真技术,首先需要进行理论学习,了解交流电机的工作原理、控制理论和仿真技术的基本原理。
其次,需要进行实际操作和实验,通过搭建电机控制系统和使用仿真软件进行电机仿真模拟,加深对技术的理解和掌握。
pid控制系统课程设计
pid控制系统课程设计一、教学目标本节课的教学目标是让学生掌握PID控制系统的原理、结构和应用,具备分析和设计PID控制系统的能力。
具体目标如下:1.知识目标:–了解PID控制系统的概念、原理和组成部分;–掌握PID控制器的参数调整方法;–了解PID控制系统在实际应用中的优缺点。
2.技能目标:–能够运用PID控制原理分析和解决实际问题;–能够使用仿真软件进行PID控制系统的模拟和优化;–能够设计简单的PID控制系统并进行实际操作。
3.情感态度价值观目标:–培养学生对自动化技术的兴趣和认识,认识到PID控制系统在现代工业中的重要作用;–培养学生勇于探索、善于合作的科学精神;–培养学生关注社会、关心他人的责任感。
二、教学内容本节课的教学内容主要包括以下几个部分:1.PID控制系统的概念和原理:介绍PID控制系统的定义、作用和基本原理,让学生了解PID控制系统在工业控制中的应用。
2.PID控制器的参数调整:讲解PID控制器的参数(比例系数、积分系数、微分系数)的作用和调整方法,引导学生掌握参数调整的技巧。
3.PID控制系统的应用:分析PID控制系统在实际应用中的优缺点,让学生了解PID控制系统在不同领域的应用实例。
4.PID控制系统的仿真与实际操作:利用仿真软件,让学生亲自模拟和优化PID控制系统,提高学生运用所学知识解决实际问题的能力。
三、教学方法本节课采用多种教学方法相结合,以提高学生的学习兴趣和主动性:1.讲授法:讲解PID控制系统的原理、结构和参数调整方法,为学生提供系统的知识结构。
2.案例分析法:分析实际应用中的PID控制系统案例,让学生了解PID控制系统的应用场景和优缺点。
3.实验法:让学生利用仿真软件进行PID控制系统的模拟和优化,培养学生的实际操作能力。
4.讨论法:学生进行小组讨论,分享学习心得和体会,提高学生的沟通能力和团队协作精神。
四、教学资源本节课的教学资源包括以下几个方面:1.教材:选用国内权威的PID控制系统教材,为学生提供系统的理论知识。
PID例子

本文只是技术交流,仅仅是鄙人对一些知识的看法和认识,由于鄙人学疏才浅,必然会在本文中出现定义理解不深刻,原理叙述有误等错误,敬请各位高人理解,如有错误之处,请大家指出,我将积极学习改进。
其实很早就应该写这么一个东西,由于学习和工作太忙,一直没有时间去写,春节放假,偶尔有了时间,决心一定要写好,本文只是针对初学者,对于那些老鸟和大神们,基本上没有看的必要,所以再您看这篇文章之前,还要对我多多的理解和宽容,写不好,我改进学习,写的好,希望对您有帮助。
(一)PID 的背景和一些原理上理解PID 控制技术,是最简单的闭环控制技术之一,一般都是利用单反馈或者多反馈来实现对控制对象的调节,实现被控对象的可控性和可预知性的控制。
使得设备运行的更加的可靠,合理且平稳。
PID 的全称为比例积分微分控制,P 即为比例,I 即为积分,D 即为微分。
PID 往往都是应用于惰性系统,所谓惰性系统就是变化较慢且无法精确控制和调节的对象,其中最最重要的特点就是变化速度慢,调节速度慢,控制周期较长,最经典的控制对象就为温度的温控。
下面就举一个简单的例子进行说明:比如我们要对一个水箱里面的水进行加热,我们的目标加热温度为100℃,首先我们不用闭环对水温进行加热,也就是说我们只是靠人为观察温度计的温度值来对加热器进行人工的干预。
当温度加热到100℃以后,我们就停止加热,这个时候,虽然水温已经到达100 且加热器已经不再通电加热,但是由于加热器的预热和水本身传递温度的惰性,导致水温会继续上升,经过一段时间后,水温会继续升高,并且超过100℃,那么该系统就无法达到我们所预期的要求。
这个时候您谁想,停止加热后本身会继续散热继续升温,那等到温度到90摄氏度左右以后,我们停止加热,然后利用水的惰性和加热器的散热,让水温继续升温,正好达到100℃,这样不就解决问题了吗?这么想是对的,但是水温要达到90 几度的时候我们停止加热呢?还有就是从停止加热到100℃的时间是多少?经过一段时间后,温度没有达到100℃,而是小于100 摄氏度以后温度就达到了顶峰,这样怎么办?上述所有的办法,可能能够解决水温到达100℃的要求,但是其中很多环节很多结果都是无法预测和无法控制的,即便经历了很麻烦的人为干预同时经过了一个较长的时间达到了我们对水温加热到100℃的要求,也要经历一个相当复杂和相当漫长的时间才能达到,并且整个过程一直要有人为的干预,实在是属于劳民伤财。
PID效应的成因和解决方案

1.1PID 效应的发现和成因PID效应( Potential Induced Degradation )全称为电势诱导衰减。
PID 直接危害就是大量电荷聚集在电池片表面,使电池表面的钝化效,从而导致电池片的填充因子、开路电压、短路电流降低,电池组件功率衰减。
2005年Sun power公司就发现晶硅N型电池在组件中施加正高压后存在PID 现象。
2008年,Ever green 公司报道了P 型电池组件的PID 效应。
但是目前还没有明确的证据能够证明一个工作了五年的光伏电站,组件的输出功率骤降就是因为PID 效应引起的。
不过近年光伏行业对电池组件的PID 效应还是引起了足够的重视。
德国测试企业TUV发布了他们的建议标准:TC82 标准化(82/685 / NP) 温度、湿度、偏置电压、导体, 上述参数测试的主要环境数据。
目前光伏行业比较认可的认可的一种PID 效应成因是:随着光伏系统大规模应用,系统电压越来愈高,电池组件往往20-22 块串联才能达到逆变器的MPPT工作电压。
这就导致了很高的开路电压和工作电压.STC环境下300WP 的72 片电池组件为例,20 串电池组件的开路电压高达860V,工作电压为720V. 由于防雷工程的需要,一般组件的铝合金边框都要求接地,这样在电池片和铝框之间就形成了接近1000V 的直流高压。
电池组件在封装的层压过程中,分为 5 层。
从外到内为:玻璃、EVA、电池片、EVA、背板。
由于EVA材料不可能做到100%的绝缘,特别是在潮湿环境下水气通过作为封边用途的硅胶或背板进入组件内部。
EVA的酯键在遇到水后按下面的过程发生分解,产生可以自由移动的醋酸。
醋酸和玻璃表面碱反应后,产生了钠离子。
钠离子在外加电场的作用下向电池片表面移动并富集到减反层而导致PID现象的产生(图1-1 为PID效应产生的原理图)。
图1-1文献[2] 中提到了一个化学现象。
已经衰减的电池组件在100℃左右的温度下烘干100小时以后,由PID引起的衰减现象消失了。
自动化常用英文缩写

自动化常用英文缩写自动化技术在现代工业和生活中扮演着重要的角色。
为了方便交流和减少冗长的表达,人们普遍使用缩写词来代表自动化领域中的常用术语和概念。
以下是一些自动化常用英文缩写及其解释:1. PLC:可编程逻辑控制器(Programmable Logic Controller)PLC是一种用于控制工业过程的电子设备,它可以接收输入信号并根据预设的程序进行逻辑运算,最终输出控制信号。
2. SCADA:监控、控制和数据采集(Supervisory Control and Data Acquisition)SCADA系统用于监控和控制工业过程中的设备和系统。
它能够实时采集数据、进行远程控制,并提供报警和故障诊断功能。
3. HMI:人机界面(Human-Machine Interface)HMI是一种提供人机交互的设备或者软件。
它通常由触摸屏、键盘和显示器组成,用于操作和监视自动化系统。
4. DCS:分散控制系统(Distributed Control System)DCS是一种用于控制和监控工业过程的系统。
它由多个分散的控制器组成,能够实现分布式的控制和数据处理。
5. MES:创造执行系统(Manufacturing Execution System)MES是一种用于管理和控制创造过程的系统。
它与企业资源计划(ERP)系统集成,能够实现生产计划、物料追踪和质量管理等功能。
6. CNC:计算机数控(Computer Numerical Control)CNC是一种通过计算机控制的自动化加工技术。
它能够实现高精度和高效率的加工,广泛应用于机械加工和创造业。
7. PID:比例-积分-微分(Proportional-Integral-Derivative)PID是一种常用的控制算法。
它通过比较实际值与设定值的差异,并根据比例、积分和微分的参数进行调整,实现闭环控制。
8. RFID:射频识别(Radio Frequency Identification)RFID是一种用于自动识别和追踪物体的技术。
仪表PID图例符号

方便沟通与交流:在工程领域,PID图例符号是一种通用的语言,方便工程师、技术 人员之间的沟通与交流,确保对控制系统的理解与实现一致。
提高设计效率:使用PID图例符号进行设计,可以减少文字描述和绘图工作量,提高 设计效率和质量。
•
仪表PID图例符号的绘制与编辑
•
打开仪表PID图例符号库
•
选择需要的符号并拖拽到绘图区域
•
调整符号大小、位置和颜色
•
添加或删除符号的线条和节点
•
使用快捷键进行快速编辑
•
保存编辑后的符号为常用符号或自定义符号
PID图例符号的组成:P、I、D三个字母的组合 PID图例符号的含义:比例、积分、微分 PID图例符号的作用:描述控制系统中的控制规律 PID图例符号的应用:在自动化领域中广泛使用,用于描述各种控制系统的控制规律
描述控制系统结构:PID图例符号能够清晰地描述控制系统的结构,包括控制器、执 行器、传感器等组成部分。
差压流量计PID图例符号
涡街流量计PID图例符号
电磁流量计PID图例符号
超声波流量计PID图例符 号
浮球液位计PID图例符号 差压式液位计PID图例符号
磁翻板液位计PID图例符号 超声波液位计PID图例符号
PID图例符号的 分类与识别
仪表PID图例符 号的使用方法
PID图例符号的 参数设置与调整
•
调整符号大小、位置和颜色
•
添加或删除符号的线条和节点
•
使用快捷键进行快速编辑
•
保存编辑后的符号为常用符号或自定义符号
•
基于STM32单片机PID温控学习系统设计
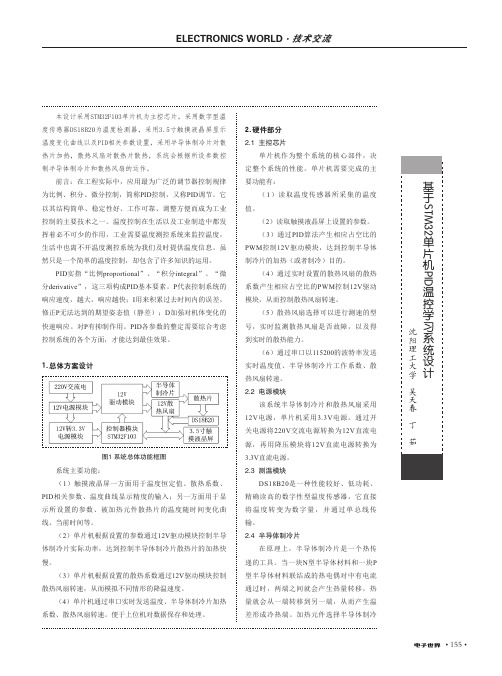
• 155•本设计采用STM32F103单片机为主控芯片,采用数字型温度传感器DS18B20为温度检测器,采用3.5寸触摸液晶屏显示温度变化曲线以及PID相关参数设置,采用半导体制冷片对散热片加热,散热风扇对散热片散热,系统会根据所设参数控制半导体制冷片和散热风扇的运作。
前言:在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID 调节。
它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
温度控制在生活以及工业制造中都发挥着必不可少的作用,工业需要温度测控系统来监控温度,生活中也离不开温度测控系统为我们及时提供温度信息。
虽然只是一个简单的温度控制,却包含了许多知识的运用。
PID 实指“比例proportional ”、“积分integral ”、“微分derivative ”,这三项构成PID 基本要素。
P 代表控制系统的响应速度,越大,响应越快;I 用来积累过去时间内的误差,修正P 无法达到的期望姿态值(静差);D 加强对机体变化的快速响应。
对P 有抑制作用。
PID 各参数的整定需要综合考虑控制系统的各个方面,才能达到最佳效果。
1.总体方案设计图1 系统总体功能框图系统主要功能:(1)触摸液晶屏一方面用于温度恒定值、散热系数、PID 相关参数、温度曲线显示精度的输入;另一方面用于显示所设置的参数、被加热元件散热片的温度随时间变化曲线、当前时间等。
(2)单片机根据设置的参数通过12V 驱动模块控制半导体制冷片实际功率,达到控制半导体制冷片散热片的加热快慢。
(3)单片机根据设置的散热系数通过12V 驱动模块控制散热风扇转速,从而模拟不同情形的降温速度。
(4)单片机通过串口实时发送温度、半导体制冷片加热系数、散热风扇转速。
便于上位机对数据保存和处理。
2.硬件部分2.1 主控芯片单片机作为整个系统的核心部件,决定整个系统的性能。
单片机需要完成的主要功能有:(1)读取温度传感器所采集的温度值。
光伏逆变器pid
光伏逆变器pid光伏逆变器PID光伏逆变器是将太阳能发电系统中直流电转换为交流电的关键设备。
PID(Potential Induced Degradation)即潜在感应腐蚀,是指光伏组件在特定环境下产生的电势差,导致发电效率下降的现象。
光伏逆变器PID是为了解决光伏组件PID效应而设计的一种技术。
光伏逆变器PID效应的原因是由于光伏组件在工作过程中,组件与地面或其他接地物之间形成了电势差。
这种电势差会引发电流在光伏组件的玻璃和背板之间流动,导致电压损失,进而减少光伏组件的发电效率。
光伏逆变器PID技术的出现,旨在通过控制逆变器的输出电压,减小光伏组件之间的电势差,从而有效抑制PID效应,提高光伏系统的发电效率。
光伏逆变器PID技术的核心是PID抑制算法。
在光伏逆变器中,通过加入PID抑制算法,可以在逆变器输出电压中引入一定的频率和幅度的波动,以抵消光伏组件产生的电势差。
这种波动可以有效地减小电势差,降低PID效应对光伏组件的影响。
PID抑制算法的实现需要逆变器具备一定的控制能力。
光伏逆变器PID技术通常采用先进的数字信号处理器(DSP)作为控制核心,通过对逆变器输出电压进行实时监测和调整,来实现PID效应的抑制。
此外,PID抑制算法还需要考虑光伏组件的工作状态、环境温度、光照强度等因素,以便根据实际情况进行动态调整,以最大程度地减小PID效应的影响。
光伏逆变器PID技术的应用可以带来多重好处。
首先,通过抑制PID效应,可以提高光伏系统的发电效率,从而增加系统的发电量,提高经济效益。
其次,PID技术可以延长光伏组件的使用寿命,减少维护和更换成本。
另外,PID抑制算法还可以提高光伏系统的稳定性和可靠性,保证系统的正常运行。
光伏逆变器PID技术已经得到了广泛应用,并取得了显著的成果。
在光伏发电领域,PID技术已经成为一项重要的技术支撑,为光伏系统的稳定运行和高效发电提供了可靠的保障。
随着光伏技术的不断发展,相信光伏逆变器PID技术将会得到进一步的完善和推广,为光伏发电行业带来更多的创新和发展机遇。
毕业设计(论文)基于智能pid的直流电机调速系统
摘要由于变频技术的出现,交流调速一直冲击直流调速,但综观全局,尤其是我国在此领域的现状,再加上全数字直流调速系统的出现,提高了直流调速系统的精度及可靠性,直流调速仍将处于重要地位。
对于直流调速系统转速控制的要求有稳速、调速、加速或减速三个方面,而在工业生产中对于后两个要求已能很好地实现,但工程应用中稳速指标却往往不能达到预期的效果,稳速要求即以一定的精度在所需要的转速上稳定运行,在各种干扰下不允许有过大的转速波动。
稳速很难达到要求原因在于数字直流调速装置中的PID调节器对被控对象及其负载参数变化自适应能力差。
模糊控制不要求被控对象的精确模型且适应性强,为了克服常规数字直流调速装置的缺点,本文将模糊控制与PID调节器结合,着手fuzzy-PID复合控制方案理论研究和硬件的实现,设计出相关控制方案的直流调速系统,该方案以AT89C51单片机为主控单元,合适的驱动电路和一些外围电路构成硬件系统;以参数模糊自整定PID为控制策略。
本文对于系统的硬件及软件设计进行了详细的设计,包括电机控制模块、检测模块、电机驱动模块的设计等,以及软件的控制思想和编程方法。
本系统的设计顺应了目前国外直流调速朝着数字化,发展的趋势,充分利用了单片机的优点,使得通用性得到了提高。
经过理论分析和设计此控制器的各项性能指标优于模糊控制器和常规PID 控制器,具有很强的鲁棒性。
关键词:模糊控制;直流调速;稳态性能;单片机AbstractAfter Frequency Conversion Technology appeared,AC speed regulation method had always impacted DC Speed Regulation,but Generally speaking,especially the status in our country,in addition to digital DC Speed Regulation emerged,it improving the precision and the reliability in DC Speed Regulation System.DC Speed Regulation was also in the important status.Speed stability、speed ratio、acceleration、deceleration are the four factors in DC Speed Regulation System,the last two factors already reached well in industry application.But the Stability index does not match the desired purpose.Stability index is that the DC motor running in the precision range on desired speed,even if the system has uncertain disturbance.It is hard to realize because of adaptiveability digital DC Speed Regulation device is not enough when in the condition of the load parameters change unpredictably.Fuzzy control does not need precision mathematic model to conquer the shortcoming in routine digital DC Speed Regulation.We can combine with the PID adjuster and fuzzy control,focusing on theory research and realization of fuzzy-PID compound control scheme,design relevant DC Speed Regulation System was designed in the dissertation.This scheme is based on the core of AT89C51 single chip,appropriate driver circuit and some peripheral circuits,Fuzzy Self-tuning PID is the control strategy,This dissertation also introduce the plan of hardware and software,including DC motor control module、driver module、examine circuit and so on in detail,if explained the method of control and the thought of software,this system got used to the trend of digital power in the international,used the single micro—computer fully,and improveed the general use of the power.Theoretical analysis and design showed that all performance indexes of Parameter Self-Adjusting Fuzzy Logic PID Controller was in advance of those of the simple fuzzy controller and the conventional PID controller.Especially,the adaptive fuzzy controller is robust.Keywords:fuzzy logic control(FLC);DC Speed Regulation;stability performance;Single micro-computer目 录摘 要 .................................................................................................................................................I Abstract ......................................................................................................................................... II 目 录 ............................................................................................................................................ I II第一章 绪论 (1)1.1 序言 (1)1.2 PID 控制中存在的问题 (1)1.3 模糊控制的发展状况 (2)模糊控制的发展过程 (2)模糊控制技术要解决的问题 (3)1.4 直流调速系统的发展概况 (4)1.5 本课题的研究内容及目的 (5)第二章 直流调速系统的理论分析 (6)2.1 控制理论在调速系统中的应用分析 (6)调速系统性能指标 (6)直流调速常用的方法 (7)2.2 传统直流调速系统中调节器参数的计算 (9)设计指标及要求 (9)固有、预置参数计算 (9)电流调节器参数计算 (10)转速调节器参数 (10)2.3 数字PID 调节器的原理及应用 (12)2.4 数字PID 控制器的算法实现 (14)第三章 模糊PID 控制算法设计 (16)3.1 模糊控制的原理 (16)模糊控制的理论基础 (16)模糊控制系统的组成 (16)模糊控制在实际中的适用性 (17)3.1.4 模糊控制器的设计方法 (17)3.2直流调速系统模糊PID 控制结构设计 .......................................................................... 18 被控过程对参数P K 、I K 、D K 的自整定要求 (19)3.3模糊自整定PID 参数控器设计 (20)确定控制器的输入、输出语言变量 (20)3.3.2确定各语言变量论域,在其论域上定义模糊量 .............................................. 21 确定P K 、I K 、D K 的调节规则 .. (21)模糊推理和模糊运算 (22)第四章 调速系统硬件设计 (24)4.1硬件总体方案设计 (24)4.2 主电路设计 (24)4.3 整流电力二极管参数的确定 (25)4.4 IGBT 的选择 (26)4.5 IGBT 驱动电路的设计 (26)IGBT 驱动电路的一般要求 (26)IGBT 的专用驱动集成电路 (26)4.6 泵升电压的抑制 (28)4.7 电流反馈信号检测装置设计 (29)概述 (29)4.7.2 电流检测装置的设计 (30)4.8转速检测环节及其与单片机接口电路的设计 (30)4.9 模拟量给定电流、转速反馈量与单片机的接口设计 (32)4.10 键盘与显示接口电路 (32)第五章系统软件设计 (34)5.1主程序 (34)5.2 A/D转换设计 (35)5.3键盘与显示子程序设计 (36)5.4模糊PID控制流程设计 (37)结论 (38)参考文献 (39)致谢 (42)第一章绪论1.1 序言在现代化的工业生产过程中,几乎无处不使用电力传动装置,生产工艺、产品质量的要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速。
机的交流伺服电机转速控制系统设计

机的交流伺服电机转速控制系统设计机器的交流伺服电机转速控制系统设计是一个复杂而关键的过程。
这个过程涉及到多个组件和步骤,包括传感器选择、控制器设计、反馈回路等。
在本文中,我们将详细介绍和讨论这些方面,并给出一种基于PID控制器的转速控制系统设计示例。
1.传感器选择在设计交流伺服电机转速控制系统时,选择合适的传感器对于准确地测量电机转速非常重要。
最常用的传感器是霍尔传感器和光电编码器。
霍尔传感器使用磁场检测旋转,而光电编码器使用光电开关检测旋转。
根据具体需求选择最合适的传感器。
2.控制器设计在交流伺服电机转速控制系统中,PID控制器是最常用的控制器类型。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分通过将误差乘以一个比例常数来控制输出;积分部分通过将误差的累积值乘以一个积分常数来消除静态误差;微分部分通过将误差的变化率乘以一个微分常数来预测未来的误差。
通过调整PID控制器的参数,可以实现较好的转速控制性能。
3.反馈回路在交流伺服电机转速控制系统中,反馈回路是必不可少的。
反馈回路通过将实际测量的转速与期望的转速进行比较,从而产生误差信号。
这个误差信号被送入PID控制器,控制器将根据误差的大小和变化率输出相应的控制信号。
这个控制信号被送入电机驱动器,从而控制电机的转速。
4.精确度和稳定性在交流伺服电机转速控制系统设计中,精确度和稳定性是非常重要的指标。
精确度指的是控制系统实际转速与期望转速的偏差;稳定性指的是控制系统的输出是否在可接受的范围内波动。
通过合理选择传感器、设计合适的控制器和优化反馈回路,可以提高系统的精确度和稳定性。
5.鲁棒性和抗干扰性在实际应用中,交流伺服电机转速控制系统经常面临各种各样的干扰和外界扰动。
为了提高系统的鲁棒性和抗干扰性,可以采用一系列方法,比如滤波技术、模型预测控制等。
综上所述,交流伺服电机转速控制系统设计是一个综合考虑多个因素的复杂过程。
通过合理选择传感器、设计合适的控制器、优化反馈回路以及提高系统的精确度、稳定性、鲁棒性和抗干扰性,可以实现高性能的转速控制。
电动机的电机控制与PID调节

电动机的电机控制与PID调节电动机是一种将电能转化为机械能的装置,广泛应用于各个行业和领域。
为了更好地控制电动机的性能和效果,使用电机控制技术是非常重要的。
PID控制是一种常用的电机控制方法,本文将介绍电机的电机控制原理以及PID调节的应用。
一、电机的电机控制原理电机的电机控制原理是指通过对电流、电压等信号输入进行控制,以实现对电机转速、力矩等参数的精准控制。
在电机控制系统中,需要使用电机控制器对输入信号进行处理和转换,然后输出控制信号给电机实现控制。
电机控制的基本原理是根据电机的特性曲线,通过调整输入信号的大小和频率,控制电机的转速和力矩。
常见的电机控制方式包括直流电机控制、交流电机控制和步进电机控制等。
其中,直流电机控制最为简单,可以通过改变电压大小和极性来控制转速和方向;交流电机控制较为复杂,需要采用V/F控制、矢量控制等方式;步进电机控制则通过控制电机驱动器的脉冲信号来实现精确控制。
二、PID调节在电机控制中的应用PID调节是一种经典的控制方法,常用于电机控制系统中。
PID控制器由比例(P)、积分(I)、微分(D)三个部分组成,通过对误差信号进行比例、积分和微分的处理,提供控制输出,从而使系统达到稳定状态。
1. 比例控制(P)比例控制是根据误差的大小来调整控制输出的大小。
在电机控制中,可以根据设定值和反馈值的差异来调整输出信号的大小,从而控制电机的转速和力矩。
2. 积分控制(I)积分控制是根据误差的累积值来调整控制输出的大小。
在电机控制中,积分控制可以通过积分误差的方法来消除系统的静态误差,使控制更加精确。
3. 微分控制(D)微分控制是根据误差的变化率来调整控制输出的变化率。
在电机控制中,微分控制可以通过监测误差的变化趋势,来提前调整控制输出,从而使系统更加稳定。
PID调节在电机控制中的应用可以帮助提高系统的响应速度和稳定性。
通过适当调整PID参数,可以根据实际需求来优化电机控制系统的性能。
控制理论课程设计pid

控制理论课程设计pid一、教学目标本课程的教学目标是使学生掌握PID控制理论的基本概念、原理和应用方法。
通过本课程的学习,学生将能够:1.知识目标:理解PID控制器的原理、结构和参数调整方法;掌握PID控制算法的实现和应用。
2.技能目标:能够运用PID控制理论分析和解决实际控制系统问题;具备PID控制器的设计和参数优化能力。
3.情感态度价值观目标:培养学生对自动控制技术的兴趣和热情,提高学生解决实际问题的能力,培养学生的创新意识和团队协作精神。
二、教学内容本课程的教学内容主要包括以下几个部分:1.PID控制理论的基本概念和原理:包括PID控制器的结构、工作原理和参数调整方法。
2.PID控制算法的实现:包括PID控制算法的编程实现和仿真分析。
3.PID控制器的应用:包括PID控制器在各种实际控制系统中的应用案例分析。
4.PID控制器的设计和参数优化:包括PID控制器的设计方法、参数优化策略和实际应用。
三、教学方法为了达到本课程的教学目标,将采用以下教学方法:1.讲授法:通过讲解PID控制理论的基本概念、原理和应用,使学生掌握基本知识。
2.讨论法:通过分组讨论和课堂讨论,引导学生深入思考和理解PID控制理论。
3.案例分析法:通过分析实际案例,使学生了解PID控制器在实际中的应用和效果。
4.实验法:通过实验操作,使学生亲手实践PID控制器的设计和应用,提高学生的实际操作能力。
四、教学资源为了支持本课程的教学内容和教学方法的实施,将准备以下教学资源:1.教材:选用权威、实用的PID控制理论教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,丰富学生的知识体系。
3.多媒体资料:制作课件、教学视频等多媒体资料,提高课堂教学效果。
4.实验设备:准备相关的实验设备和器材,为学生提供实践操作的机会。
五、教学评估为了全面、客观地评估学生的学习成果,本课程将采用以下评估方式:1.平时表现:通过课堂参与、提问、讨论等环节,评估学生的学习态度和参与程度。
船用控制手柄PID控制技术

• 158•船用控制手柄PID控制技术中电科(宁波)海洋电子研究院有限公司 连雪海宁波财经学院 马 勰浙大宁波理工学院 胡可威中电科(宁波)海洋电子研究院有限公司 徐 峰浙大宁波理工学院 宋苏谕 梁译文 马修水船用控制手柄是一种用于远程操纵的控制设备,是船舶信息化中重要的一环,广泛应用于船舶推进系统、港口机械、液压控制等领域。
船用控制手柄根据结构及其功能不同,可分为普通型控制手柄、船用随动型控制手柄(包括驾驶室控制手柄和机舱接受指示手柄)、船用全回转控制手柄。
电机伺服控制技术是船用控制手柄的关键技术之一。
由于空心杯电机电枢无铁心的特殊结构,使其具有节能及铁心电机无法达到的控制和拖动特性。
在船用手柄开发中,主要使用的是空心杯永磁同步电机,永磁同步电机,如何实现永磁同步电机控制最优,过渡过程时间短,且无静差,控制优化是关键。
本文基于PID 控制器介绍永磁同步电机伺服控制系统的控制技术。
1 PID控制器PID 控制器主要由比例(P )、积分(I )和微分(D )模块组成,通过调节比例系数K p ,积分时间T i ,微分时间T d 三个参数,充分利用比例、微分、积分控制各自特点和优势,实现控制系统具有良好的动、静态特性及稳定性,满足高效控制的需要,设计高性价比的控制系统。
PID 控制器工作原理如图1所示。
图1 PID控制器工作原理PID 控制不需要推导和求解电机及传动系统精确的数学模型即可进行有效控制,且鲁棒性较好,是目前实际应用中普遍采用的控制方法。
在PID 控制系统中,不能单独使用微分和积分控制,一般PI 、PD 模块组合控制。
在工程应用中,比例系数、积分时间以及微分时间的合理设计和调节十分重要。
一般通过阶跃输入、输关系确定和调节比例环节的比例系数;通过在阶跃输入下用示波器观察比例输出和积分输出相等时确定和调节积分环节的积分时间。
最后调节微分环节的微分时间,主要是在等速斜坡输入下比例输出和微分输出相等时确定和调节微分环节的微分时间。
基于分段式pid无刷直流电机控制系统设计

• 110•针对传统PI 调节给定转速越高,调节效果越差,而采用模拟PID 和神经网络算法程序设计较复杂,设计了一款专用于四旋翼飞行器的三相无感无刷直流电机调速系统,它由C8051F396微处理器基本应用系统、换相过零检测电路、三相逆变桥及其驱动电路等单元所组成。
软件包含有三段启动法的电机预启动程序、换相程序、电机保护程序、分段式PID 程序等。
通过实际制作,验证了换相时实际三相波形与理论分析三相波形一致,并比较了分段式PID 控制和传统PI 控制时的电机空载调速效果。
实验表明,运用于920KV MN2212无感无刷直流电动机的驱动,运行平稳,调速性能良好。
1 引言伴随无人机应用领域热潮的来临,对于无刷直流电机控制系统的研究也逐渐增多。
在无刷直流电机控制系统中,通常采用安装位置传感器或反电动势过零检测法来获取转子的位置,进而实现电机的换相,在调速方式上,有开环调速或闭环调速两种。
其中文献(刘官瑞,李绪胜,樊云光,王晓飞,小型无感无刷直流电机控制系统设计与研究:科学技术创新,2018;赵熠,黄海波,卢军,简炜,江学焕,张金亮,无感无刷直流电机控制系统的研究与设计:微电机,2018)都采用反电动势过零检测法获取转子位置,但未引入闭环调速的概念,导致调速效果差,文献(童宏伟,张莉萍,申景双,解大,陈宇晨,基于STM32的无刷直流电机控制系统:传感器与微系统,2019)采用神经网络PI 闭环控制,程序设计较复杂,对微处理器要求高,造价成本也相应高,而文献(温嘉斌,赵红阳,刘子宁,无刷直流电机神经网络PI 控制系统设计:电机与控制应用,2018)虽引入模糊PID 控制,但是模糊PID 控制不易掌握,不利用推广。
本设计采用以C8051F396微处理器为核心的无感无刷直流电机控制系统,采用反电动势过零检测法获取转子位置,采用分段式PID 算法形成了闭环调速系统,这样不仅简化了外围电路,而且降低了程序的难度,并保证了电机在不同给定转速时依然保持良好的调速效果。
浅析PID巡线算法的应用
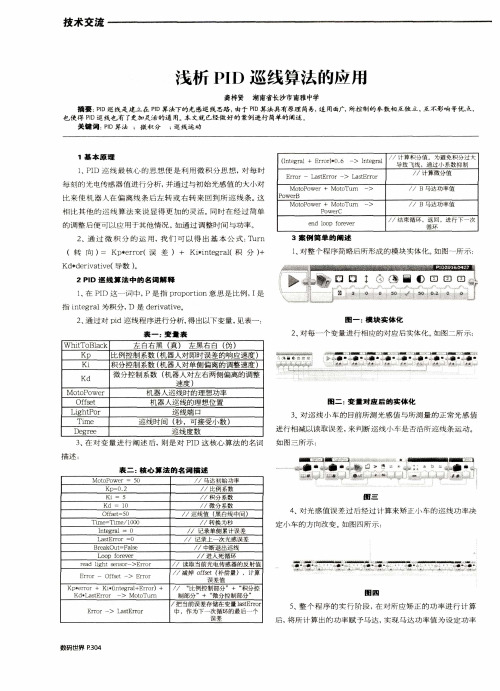
圈 三 4、对 光 感 值 误 差 过 后 经 过 计 算 来矫 正 小 车 的 巡 线 功 率 决 定 小 车 的 方 向改 变 。如 图四 所 示 :
// 马达 初 始功 率 // 比 例 系 数 //积 分 系数 //微 分 系 数
//巡线值 (黑 白线中间 ) //转 换 为 秒
// 记 录 单 侧 累 计 误 差 // 记 录 上 一 次 光 感 误 差
//中 断 退 出巡 线 //进 入死 循 环
read light 9en ̄)r一>Error Error
Error一> LastError
/把 当前误 差存储 在变量 iastError 中 ,作 为下 一次 循 环 的 最 后 个 误 差
■■ 【薹二二]誓【 :五 三:l
誓 - ■ 一
墨
一
,
释
孽 .
· 翊■■ ■——■ 誓蟹 翻 —■:王 1
: ’ …
…蕾簟 -
一
嚣
技术 交流
浅 析 PlD 巡 线 算法 的应用
龚梓贤 湖南省长沙市南雅中学 摘 要 :PlD巡 线 是 建立 在 PID算 法 下的 光 感 巡 线 思路 ,由 于 PID算 法具 有 原 理 简易 ,适 用 面广,所 控 制 的 参 数 相 互 独 立 ,互 不 影 响 等 优 点 也 使得 PID巡线也有 了更加灵活 的通 用。本 文就已经做好 的案例进行 简单的阐述 。 关 键 词 :PID算 法 : 微 积 分 ;巡 线 运 动
. | { s s s
舶 M i 】簟 ■ 【 ■■l l■ j It ’ j■‘ , Il L一一=】曲 ■ i-t j
: l| i _ ■ · ■ -I · ● · ■ - · 簟 -
PID图(工艺仪表流程图)基础知识培训

这几种图由于要求不同,其内容和表达的重点也不一致,但彼此之
间却有着密切的联系。
方案流程图
方案流程图的作用及内容
作用:表达物料从原料到成品或半成品的工艺过程,及 所使用的设备和机器。用于设计开始时的工艺方案的讨 论,也可作为施工流程图的设计基础。 内容: ①设备——用示意图表示生产过程中所使用的机器、设
进 出
节目录 主菜单
HG20519.2中 管道组合号规 定:
备注:公称直径以mm表示,例如:50即50 mm;管道编号一般为四位数字,首位 数字代表“部分号”,后面数字为管道序号。如果装置不分成若干部分,则管道编号一 般为三位数字,没有“部分号”。
第三部分 P&ID图的通用设计规定
P&ID图的管道隔热规定
P&ID图的基本内容
P&ID图的基本内容
1.设备示意图:用规定的图形符号和文字代号,表示工艺过程的 全部设备、机械和驱动设备,包括备用设备和移动式设备, 并进行编号和标注。 2.管道流程线: 详细表示所需的全部管道、阀门、主要管件,( 包括临时管道、阀门和管件)、公用工程站和隔热等,并进行 编号和标注。 3. 表示全部工艺分析取样点,并进行编号和标注。 4. 表示全部检测、指示、控制功能仪表,包括一次仪表和传感 器,并进行编号和标注。 5. 安全生产、试车、开停车和事故处理在P&ID上需要说明的事 项,包括对管道、自控的设计要求和关键设计尺寸。
一、仪表图形符号
包括: 1.测量点(包括检测元件、取样点) 2.连接线(通用仪表信号线、相交相连、相交不相连) 3.常用仪表及安装位置的图形符号(如孔板、转子流量计) 4.常用执行器的图形符号
过程测量与控制仪表的功能标志及图形符号
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汇聚层
汇聚层
120G环 200G环
400G环
•合适的带宽,量身定造 •灵活组网,扩容方便 •业务即开即通,运维高效 •数字化网络,SDH-LIKE,高效简化光方 向处理,总体节省40%机房面积。
…… BRAS BRAS
……
SDH/PDH
Enterprise group
华为OTN,超大容量,光电集成,打造完美城域核心传送解决方案
HUAWEI TECHNOLOGIES CO., LTD. Huawei Confidential Page 13
OTN“全系统+小系统”典型应用模式
80×10G/40G 构建核心带宽池, 满足核心调度需 求
SDH-LIKE的 OTN网络
光电集成,MADM 式组网,无光方向子 架/无光放/无跳纤
核心调度层 80G 环
ENQ2:4路10G业务(背板侧)的接入 功能,只能与NPO2单板配合使用,1
集中交叉 ODU0/1/2/2e 客户侧信号(10G/2.5G/GE等)
个槽位
12波:1*ENQ2+NPO2
8波:NPO2
8800 T64/T32/T16(R6)
2010年推出支线路分离PID线路板-NPO2,最大80波容量,支持 ODU0/1/2/2e背板调度,不支持客户侧直接接入
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 8
PID在T16上的实现方案
4组PID可用槽位
走线槽 EFI AUX PIU AUX PIU 走线槽 ATE
E L Q X
N 1P O 2
E L Q X
N 2P O 2
IU10 XCS/STG/SCC
IU9 XCS/STG/SCC
E L Q X
IU11
N 3P O 2
IU12 IU13 IU14
E L Q X
IU15
N 4P O 2
IU16 IU17 IU18
IU1
IU2
IU3
IU4
IU5
IU6
IU7
IU8
FAN
120G
120G
120G
120G
支线路分离PID实现了40/80波应用规格,可以使用当前系统的光放等器件,保证系统的兼容性。
240G环
80*10G/40G ASON
200G环
OLT上行
120G 环
光电集成组汇聚环,容 量适中,无跳纤、省空 间,易开通易维护 节点多、分布广,机 房空间紧张,光电集 成有效降低Opex HUAWEI TECHNOLOGIES CO., LTD.
每个节点挂环再不用增加传统意义的光方向了! 网络复杂度下降、Capex/Opex下降、维护效率提高
E N Q 2
3
IU29
N P O 2
E N Q 2
4
IU33
N P O 2
S C C
8组PID可用槽位
每组最大120G
IU20
IU22
IU23
IU24
IU26
IU27
IU28
IU30
IU31
IU32
IU34
IU35
IU36
E N Q 2
5
IU2
N P O 2
E N Q 2
6
IU6
N P O 2
E N Q 2
Huawei Confidential
Page 14
汇聚层采用光电集成技术(PID)
光电集成线卡
提供80~120G带宽
集成合/分波器、激光器,降成
本、低功耗 40km跨距,适合城域组网需求
丰富的支路接入
支持GE/10GE/FE/STM-N等接口 支持分组特性、业务汇聚,OUDFlex灵
活映射 支持多种末端业务接入 高集成度:支持16*FE/12×GE/ 4×10GE/ 4×10G/8×any
7
IU12
N P O 2
E N Q 2
8
IU16
N P O 2
S C C
IU1
IU3
IU4
IU5
IU7
IU8
IU9
IU10
IU11
IU13
IU14
IU15
IU17
IU18
IU19
FAN
支线路分离PID实现了40/80波应用规格,可以使用当前系统的光放等器件,保证系统的兼容性。 OTN线路板,支持支线路分离交叉ODU0/1/2调度能力。 整个分带所有波长均不在中间站点上下时,可以整个分带为单位进行光层穿通 分带有任意波长上下,则整个波带必须进行一次电中继,中继站点配置与源站点同等数量的NPO2和 ENQ2,但无需配置支路板。
大容量OUDx交叉
交叉容量640G/1.28T/2.56T,1
+1热备份 支持ODU0/1/2调度,满足
华为OTN简系统传送平台
支线路分离,大容量线路,单纤n×10G带宽。支路、线路没有槽位限制。 支持1588V2传送,满足无线网络高精度时钟要求 支持大带宽、高QoS业务、高安全传送需求,支持IPTV组播要求,支持FMC综合承载 重传送功能,具备必要的二层特性。 光电集成,无需复杂跳纤维护
+
12*10G
传统模式,12*OTU+MUX/DEMUX,14个以上槽位
12路10G OTU
DEMUX MUX
HUAWEI TECHNOLOGIES CO., LTD.
M 4 0
O T U
12*10G信号
12*10G信号
单片PID即完成12波10G信号的发送/接收/复用/解复用
PID模式,高度集成的PID模块,3个槽位
整体效率
HUAWEI TECHNOLOGIES CO., LTD.
高
Huawei Confidential Page 4
中
PID:多板变一板的光电合一解决方案
12路10G OTU MUX M 4 0 12路10G OTU DMUX
12*10G
12*10G
O T U
传统模式,需要大量OTU和Mux/DeMux
低成本
• 省空间:槽位利用率高, 机房面积节省80% • 省功耗:相比传统解决方 案,能耗降低40% • 省时间:无需人工连纤, 网规简单,部署快捷
Huawei Photonic Integration Device
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 3
PID:投资有效率最高的光电集成方案
综合效率最高的集成方案!
用最可靠最简单的方法,将最成熟的技术集成起来,实现 更多的功能,是华为PID的根本理念
磷化铟 DFB 阵列芯片
微型TEC和加 热器集成
可成 靠熟 性度
成熟技术,混合集成
磷化铟/砷化镓 PIN芯片
R T I F D D 平台设 计
城域网络
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 15
OTN+光电集成方案应用模式
8x10G 数字集成环
40/80x40G网络
12x10G 数字集成环
城域组网配置图
10x10G 数字集成环
灵活接入,简洁的光层, 无OA/DCM
基于现网分析,OTN+数字集成方案非常适合用于以下场景。
194.45 194.25 194.05 193.85
194.35 194.15 193.95 193.75
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 10
PID的8/12/20波配置方案与规格
1 12*10G 8/12/20*10G 8*10G 2
80波在上述波长分布基础上再增加4组PID波长分布:
ENQ2 NPO2 196.05 195.85 195.65 195.45 195.25 195.05 194.85 194.65 ENQ2 NPO2 195.95 195.75 195.55 195.35 195.15 194.95 194.75 194.55 NPO2 193.65 193.45 193.25 193.05 193.95 192.65 192.45 192.25 192.55 192.35 192.15
组
12*10G
8*10G
PID
8/12/20*10G
20波以下容量系统,无需合分波单板。
关键规格,采用AFEC以提高传送能力 20 x 10G =200G,12x22dB
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 11
目
录
PID技术介绍
Huawei Confidential
Page 2
PID:创新的高集成度方案
业界最优
城域配置优化
• 40km无需光放 • 80km 无需色散补偿 • 8/12/20×10G/组,可平滑升 级至40~80波 • 自有知识产权的PID芯片
人无我有,人有我优
• 作为业界能够提供PID解决 方案的两家供应商之一, 集成度和规格高于I友商 • 其他友商无
Huawei Confidential
Page 5
目
录
PID技术介绍
PID实现方案
PID应用场景
HUAWEI TECHNOLOGIES CO., LTD.
Huawei Confidential
Page 6