MODBUS主站通讯时的注意事项
Modbus通讯协议详解
Modbus通讯协议详解协议简介:Modbus是一种通信协议,用于在自动化系统中传输数据。
它是一种简单、开放、易于实现的协议,广泛应用于工业控制领域。
本文将详细介绍Modbus通讯协议的结构、功能以及使用方法。
一、协议结构Modbus协议由两个主要部分组成:应用层和传输层。
1. 应用层应用层定义了数据的格式和传输方式。
它包括以下几个部分:- 功能码:用于标识数据传输的类型,如读取数据、写入数据等。
- 数据地址:用于指定要读取或写入的数据的位置。
- 数据长度:用于指定要读取或写入的数据的长度。
- 数据值:要读取或写入的实际数据。
2. 传输层传输层定义了数据的传输方式。
Modbus协议支持多种传输方式,包括串行通信和以太网通信。
其中,串行通信使用RS-232、RS-485等物理层协议,以太网通信使用TCP/IP协议。
二、功能码Modbus协议定义了一系列功能码,用于标识数据传输的类型。
以下是一些常用的功能码:1. 读取线圈状态(功能码:01)该功能码用于读取线圈的状态,即开关量的状态。
通过指定起始地址和数量,可以一次性读取多个线圈的状态。
2. 读取输入状态(功能码:02)该功能码用于读取输入的状态,即传感器的状态。
通过指定起始地址和数量,可以一次性读取多个输入的状态。
3. 读取保持寄存器(功能码:03)该功能码用于读取保持寄存器的值,即模拟量的值。
通过指定起始地址和数量,可以一次性读取多个保持寄存器的值。
4. 读取输入寄存器(功能码:04)该功能码用于读取输入寄存器的值,即模拟量的值。
通过指定起始地址和数量,可以一次性读取多个输入寄存器的值。
5. 写单个线圈(功能码:05)该功能码用于写入单个线圈的状态,即开关量的状态。
通过指定线圈地址和状态值,可以实现对单个线圈的写入操作。
6. 写单个保持寄存器(功能码:06)该功能码用于写入单个保持寄存器的值,即模拟量的值。
通过指定寄存器地址和值,可以实现对单个保持寄存器的写入操作。
Modbus协议电能表

Modbus协议电能表Modbus协议是一种用于实现设备之间通信的通信协议,它广泛应用于工业自动化领域。
在电能表领域,Modbus协议也被广泛应用,它使得电能表可以方便地与其他设备进行数据交换和通信。
本文将介绍Modbus协议在电能表中的应用,包括其原理、特点以及在实际应用中的一些注意事项。
首先,Modbus协议是一种基于主从结构的通信协议,它采用了简单、开放的通信方式,可以轻松实现不同厂家的设备之间的通信。
在电能表中,通常会有一个主站(主机)和多个从站(电能表),主站负责发送指令和接收数据,而从站则负责接收指令并发送数据。
这种结构使得电能表可以方便地与其他设备进行通信,实现数据的采集和监控。
其次,Modbus协议在电能表中的应用具有一些特点。
首先,它采用了简单的数据传输方式,可以通过串口、以太网等方式进行通信,非常灵活方便。
其次,Modbus协议支持多种数据格式,包括整型、浮点型等,可以满足不同应用场景的需求。
此外,Modbus协议还具有良好的兼容性,可以与各种硬件设备和软件系统进行集成,为电能表的应用提供了广阔的空间。
在实际应用中,使用Modbus协议的电能表需要注意一些事项。
首先,需要正确配置主从站的地址和通信参数,确保主从站之间可以正常通信。
其次,需要合理设计数据传输的格式和频率,避免数据传输过程中出现丢失或错误。
另外,还需要考虑安全性和稳定性等因素,保障电能表在长期运行中的可靠性和稳定性。
综上所述,Modbus协议在电能表中具有重要的应用价值,它为电能表的数据采集和通信提供了便利和灵活性。
在未来,随着工业自动化和智能化的发展,Modbus协议在电能表领域的应用将会更加广泛,为电能表的智能化和互联化提供更多可能性。
希望本文对您了解Modbus协议在电能表中的应用有所帮助,谢谢阅读。
M218_Modbus通讯注意事项

M218 Modbus 通讯注意事项内容:在Modbus通讯过程中遇到需要读取或者写入I(数字量输入线圈)和Q(内部位或数字量输出线圈)时如何配置SoMachine的功能块说明:READ_V AR支持的数据类型:MW、IW、I、QWRITE_V AR支持的数据类型:MW、QWRITE_READ_V AR支持的数据类型:MWSINGAL_WRITE支持的数据类型:MW如果需要对I或者Q进行操作的话,下面以READ_V AR和WRITE_V AR为例介绍使用时功能块的参数设置,程序结构如下所示(实现功能:读取从站号为1的M218的输入点和写入输出点的数值):变量声明:V ARaddm_1: ADDM; // 地址管理功能块re_1: READ_V AR; // 读功能块ADDRESS;//地址管理addr_1:ex_1: BOOL; //Addm功能块使能BOOL;//Read功能块使能ex_2:BOOL;//Abort功能使能ab_1:tim_1: WORD := 5;//通讯超时时间ObjectType:=1;//读取数据类型ob_1:f_1: DINT := 0;//首地址q_1: UINT := 8;//读取数据个数b_1: ARRAY[0..1] OF BYTE;//读取到的数据保存到该地址WRITE_V AR;//写功能块wr_1:ex_3:BOOL;//写功能块执行BOOL;//Abort使能ab_2:tim_2: WORD :=5;//通讯超时时间ob_2: ObjectType := 2;//写入数据类型f_2: DINT;//写入数据首地址q_2: UINT := 8;//写入数据个数b_2: ARRAY[0..1] OF BYTE;//写入数据寄存器y1: BOOL;y2: BOOL;y3: BYTE;y4: BOOL;y5: BOOL;y6: BOOL;y7: BOOL;y8: BYTE;y9: DWORD;b12: BOOL;r1: BOOL;r2: BOOL;r3: BOOL;r4: BOOL;r5: BYTE;r6: DWORD;END_V AR说明:虽然我们读取和写入的数据均为BOOL 型(I 和Q ),但是我们在通信时,将Buffer 的数组类型尽量不要声明为BOOL 类型。
modbus 通讯常见问题
Modbus 通讯常见问题这里不介绍过多Modbus的原理和理论,我也不熟悉。
废话少说,直接开始常见问题。
1、接线问题:现在大部分采用两线制(四线制较少用,这里不介绍)接线方式,采用屏蔽双绞线。
大部分厂家的接线端子标识为:A、B,但是由于各厂家之间的有可能采用的规范不太一样,有的A是正极,有的B是正极,再加上有第三方设备接线混乱,正负经常接反。
通讯之前干两件事:a)第三方设备,也就是从站线接好,用万用表量线间电压,通常会量到1~5V(个别的会到8V)的电压,没有电压,通讯肯定不通,检查线路和接线,以及第三方设备;b)量到电压,判断正负,接到主站设备对应端子上来。
2、信号源问题:确认线路正常,通讯配置及读取地址正确,通讯还是不通,有可能就是信号源的问题。
信号源的问题通常是信号衰减或者有干扰源。
Modbus通讯的理论距离是1200M,距离越长,信号衰减越厉害,加上有一些电缆质量较差,衰减更厉害。
干扰源就不用介绍了。
解决的方法如下:a)信号衰减:更换质量更好的电缆,或者在通讯电缆中间加中继器(优点可以延长Modbus通讯的理论距离,缺点是需要供电);b)干扰源:最理想的方法是排除干扰源(比较艰难)。
也可以尝试更换屏蔽效果更好的电缆,尽量减少和供电电缆放到一起。
另外,有些设备Modbus接线端子没有终端电阻,可以在电缆两端各并联一个终端电阻(电阻为120欧,哪端如果有,就不用加了,具体有没有查看设备样本,一般都会有说明)。
3、通讯配置:主从站配置(波特率、数据位数、停止位数、奇偶校验)一致就可以,不多说了。
4、通讯地址:这个是问题最多的,下面我把自己碰到问题列出来及解决方法列出来,供大家参考。
a)地址偏移:有时会发现第三方设备给你的地址表和你自己读取的不一致,甚至是读不出来,你可以尝试往前或往后读一位,比如说,地址是40001,你可以尝试读取40000或者40002;b)读取数量:有一些设备寄存器较小,读太多和通讯错误;还有一些设备,主站读取数量必须与从站一致,比如说,16位模拟量有三个,你就只能读取三个,数字量有7位,你只能读取7位。
第六章:使用Modbus注意要项
第六章:使用Modbus注意要项1 善用检核表及Utility程序做通信异常确认由于通信系统是包括双方甚至多方的设备及系统都要配合得当,才能建立完成。
于通信系统建立之初或者某种设备异动故障时,常常为了找出其通信不通的关键点,需要耗费许多时间。
本章节提供一个检核表(Check List),让使用者由硬件、配线、设备的设定系数、操作系统、应用程序等各种方向,做一一的检查,希望以标准的程序为每次通信系统建立时,提供一个最快速便捷的方法。
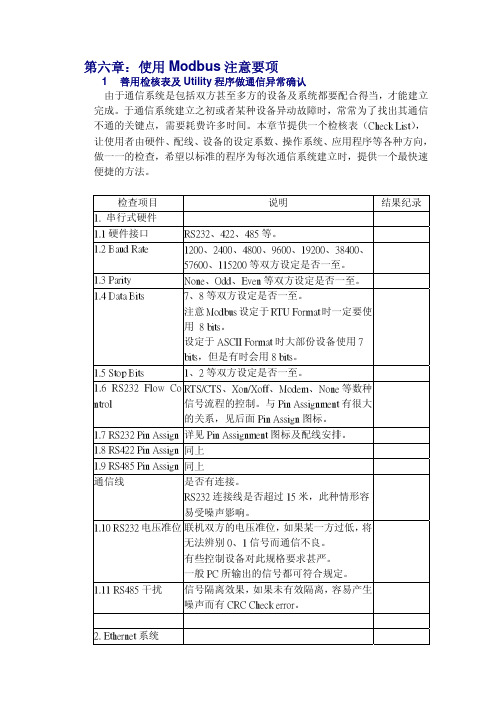
检查项目说明结果纪录1. 串行式硬件1.1硬件接口RS232、422、485等。
1.2 Baud Rate 1200、2400、4800、9600、19200、38400、57600、115200等双方设定是否一至。
1.3 Parity None、Odd、Even等双方设定是否一至。
1.4 Data Bits 7、8等双方设定是否一至。
注意Modbus设定于RTU Format时一定要使用8 bits。
设定于ASCII Format时大部份设备使用7bits,但是有时会用8 bits。
1.5 Stop Bits 1、2等双方设定是否一至。
1.6 RS232 Flow Co ntrol RTS/CTS、Xon/Xoff、Modem、None等数种信号流程的控制。
与Pin Assignment有很大的关系,见后面Pin Assign图标。
1.7 RS232 Pin Assign 详见Pin Assignment图标及配线安排。
1.8 RS422 Pin Assign 同上1.9 RS485 Pin Assign 同上通信线是否有连接。
RS232连接线是否超过15米,此种情形容易受噪声影响。
1.10 RS232电压准位联机双方的电压准位,如果某一方过低,将无法辨别0、1信号而通信不良。
有些控制设备对此规格要求甚严。
一般PC所输出的信号都可符合规定。
1.11 RS485干扰信号隔离效果,如果未有效隔离,容易产生噪声而有CRC Check error。
Modbus协议使用问题注意事项
Modbus协议使用问题注意事项Modbus协议最初由Modicon公司开发出来,是针对PLC设备设计的基于串行总线的主从模式的应用层总线设备协议。
ModbusTCP是封装在TCP包内的Modbus协议,虽然有一些变化,但是根本上还是主从模式。
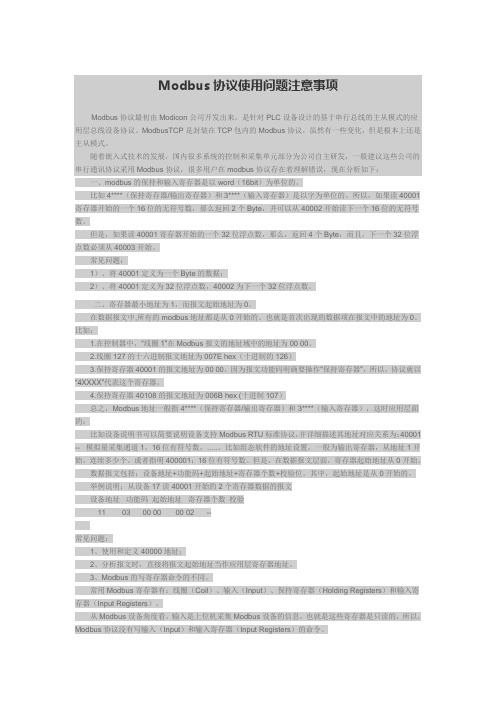
随着嵌入式技术的发展,国内很多系统的控制和采集单元部分为公司自主研发,一般建议这些公司的串行通讯协议采用Modbus协议,很多用户在modbus协议存在着理解错误,现在分析如下:一、modbus的保持和输入寄存器是以word(16bit)为单位的。
比如4****(保持寄存器/输出寄存器)和3****(输入寄存器)是以字为单位的。
所以,如果读40001寄存器开始的一个16位的无符号数,那么返回2个Byte,并可以从40002开始读下一个16位的无符号数。
但是,如果读40001寄存器开始的一个32位浮点数,那么,返回4个Byte,而且,下一个32位浮点数必须从40003开始。
常见问题:1)、将40001定义为一个Byte的数据;2)、将40001定义为32位浮点数,40002为下一个32位浮点数。
二、寄存器最小地址为1,而报文起始地址为0。
在数据报文中,所有的modbus地址都是从0开始的。
也就是首次出现的数据项在报文中的地址为0。
比如:1.在控制器中,“线圈1”在Modbus报文的地址域中的地址为00 00。
2.线圈127的十六进制报文地址为007E hex(十进制的126)3.保持寄存器40001的报文地址为00 00。
因为报文功能码明确要操作“保持寄存器”,所以,协议就以“4XXXX”代表这个寄存器。
4.保持寄存器40108的报文地址为006B hex (十进制107)总之,Modbus地址一般指4****(保持寄存器/输出寄存器)和3****(输入寄存器),这时应用层面的:比如设备说明书可以简要说明设备支持Modbus RTU标准协议,并详细描述其地址对应关系为:40001 -- 模拟量采集通道1,16位有符号数,.....。
串行线路MODBUS协议的规范和实施指南

串行线路MODBUS协议的规范和实施指南引言:MODBUS是一种串行通信协议,用于在可靠性要求不高的工业自动化领域中进行设备之间的数据通信。
本文将对串行线路MODBUS协议的规范和实施进行详细介绍,并提供一些实施指南。
一、规范MODBUS协议包括了一系列规范,用于定义设备之间的通信规则和数据格式。
以下是MODBUS协议的主要规范:1.物理层规范:MODBUS协议通常使用RS-485或RS-232串行线路来进行通信。
对于RS-485线路,需要注意设置好通信速率、数据位、停止位等参数,以保证通信的稳定性和可靠性。
2.数据传输规范:MODBUS协议采用一种主从结构的通信方式。
主设备负责发送请求,并等待从设备的响应。
从设备接收到请求后进行处理,并返回响应。
主设备和从设备之间通过读写寄存器的方式进行数据的交互。
3.数据格式规范:MODBUS协议定义了一种基于字节的数据格式,包括了多种功能码,用于表示不同的操作类型,比如读取输入寄存器、写入单个寄存器等。
每个数据包包括了一个起始字符、设备地址、功能码、数据等信息。
二、实施指南实施串行线路MODBUS协议需要遵循以下几个步骤:1.选择合适的硬件设备:根据实际需求选择合适的串行通信设备,比如RS-485转RS-232适配器、MODBUS控制器等。
确保设备的品质和稳定性。
2.配置通信参数:根据实际通信环境的需求,设置好通信速率、数据位、停止位等参数。
这些参数需要与所使用的硬件设备相匹配。
3. 实现MODBUS功能库:选择一种合适的编程语言,利用现有的MODBUS功能库实现MODBUS协议的通信功能。
常用的编程语言有C/C++、Python等。
4.编写通信程序:根据实际需求编写相关的通信程序,包括数据读取、数据写入等功能。
确保程序的稳定性和可靠性。
5.测试和调试:在实际使用前,进行一系列的测试和调试工作,包括通信参数的设置是否正确、数据的读写是否准确等。
确保系统的正常运行。
科林公司MODBUS通讯规约1

通讯规约V1.1(科林公司内部MODBUS协议)此规约适用于系列微机远动的遥测、遥控、遥信各单元与主控单元的通讯,及主控单元同维护计算机的通讯。
对于功能码小于AFH的命令为主控(维护计算机)到单元设备,对于B0H-DFH的功能码为维护计算机到主控。
通讯方式为RS485半双工方式,以主控单元为主,其他各单元为从,每个相同功能的从单元有各自唯一的地址号,主控单元查询某个从单元时,被查询的单元做出相应的回应。
扩展说明:1、在召测设备时如果设备发生遥信变位,则除当前召测类型为(遥控选择、遥控执行、读写参数、设置表底)外,都返回遥信数据帧。
2、召测设备时如果数据长度为零,则按该召测类型的有效长度来回应。
3、对子站命令的功能说明:下面以地址号为01H的子站为例,详细介绍各种功能的主站命令和子站回应的规约格式。
(1)读数字量输入状态(Read DI Status)(功能码:02)下行:该命令读取子站的遥信输入状态,它包括子站地址、功能码、遥信起上行:此回应包括子站地址、功能码、数据长度、遥信数据和CRC校验码。
其中遥信特征数据的每一位从低到高分别代表1~n路遥信输入状态,1表示ON,0表示OFF。
(假设1到16路的遥信输入状态为“1”,17到32路的遥信32路,KLD-8100:8路。
(2)读内存数据(Read Data)(功能码:03)下行:该命令将使主站获得子站的遥测实时数据,它包括子站地址、功能码、上行:此回应包括子站地址、功能码、数据长度、遥测数据、和CRC校验码。
类型设备的遥测数据:KLD-8100、KLD-8200、KLD-7100等。
(3)广播对时(功能码:04)下行:该命令是用来为各单元对时,格式如下:(4)写数字量输出状态(Control DO)(功能码:05)下行:该命令改变设备开关量中任何一路的输出状态。
它包括子站地址、功能码、开关量地址、特征数据和CRC校验码。
其中开关量的地址范围是0000H—00FFH,特征数据FF00H使遥控开关量输出状态为ON,即遥控输出继电器接点闭合,特征数据0000H使遥控开关量输出状态为OFF,即遥控输出继电器接点打开。
S7-200之间进行MODBUS 通讯
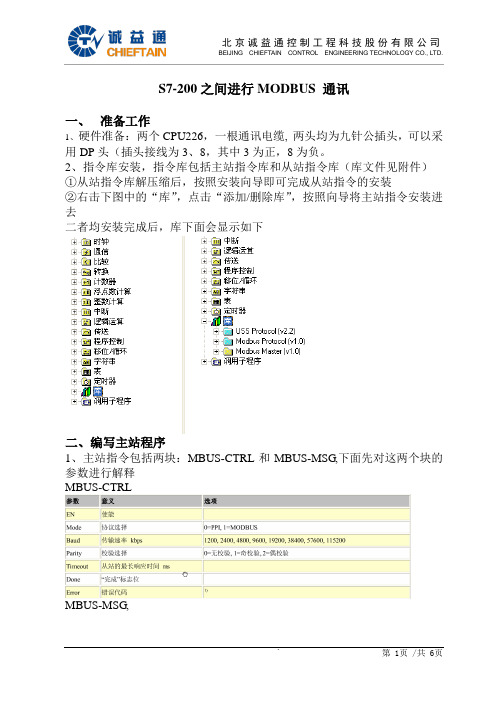
S7-200之间进行MODBUS 通讯一、准备工作1、硬件准备:两个CPU226,一根通讯电缆, 两头均为九针公插头,可以采用DP头(插头接线为3、8,其中3为正,8为负。
2、指令库安装,指令库包括主站指令库和从站指令库(库文件见附件)①从站指令库解压缩后,按照安装向导即可完成从站指令的安装②右击下图中的“库”,点击“添加/删除库”,按照向导将主站指令安装进去二者均安装完成后,库下面会显示如下二、编写主站程序1、主站指令包括两块:MBUS-CTRL和MBUS-MSG,下面先对这两个块的参数进行解释MBUS-CTRLMBUS-MSG,2、例子程序见附件,下面对例子程序的每一个网络进行讲解1)、第一个扫描周期复位各个标志位和done位2)、初始化完成后,置M0.1为1,开始读写功能3)、初始化完成后,M0.0会一直保持“on”状态Baud 波特率:设为9600,要与从站波特率对应4)、读从站实际输入值注:主站中Slave的值要与从站中的Addr的值一致First前面必须是脉冲,且其必须与EN端同步,故我们程序中的First 和EN的条件是一样的5)、上个网络中的M0.2得电后,复位M0.1和EN端的M0.5,形成循环扫描6)、第一个MSG的DONE端的M0.2得电后,启动下面网络的读写功能注:从站对应的V区地址为:2*(Addr-40001)+Holdstart.。
若这里的Addr=40100,而从7)、M0.3得电后,复位M0.2站中的Holdstart=&VB0,则从站中对应的地址为2*(40100-40001)+&VB0=VB198 8)、M0.3得电后,启动下面的MSG的读写功能9)、DONE端的M0.4得电后,复位EN端的M0.310)、M0.4得电后,下网络使能注:写从站实际Q值时,Count值=1或8n(n=1、2、3…….)当Count为1时,Addr可以为任何离散输出,8n时,Addr=8m+1(m=0、1、2…..)三、编写从站程序1、从站指令包括两块:MBUS-INIT和MBUS-SLA VE,下面先对这两个块的参数进行解释MBUS-INITMBUS-SLA VE2、从站例子程序见附件四、注意事项注1:程序中不可使用库存储区占用的地址注2:同一个线圈不可在上位和下位中同时使用,比如Q0.1在下位中使用了,上位中就不可对其进行写功能,反之亦然。
modbus使用方法

modbus使用方法【最新版2篇】篇1 目录1.Modbus 简介2.Modbus 的组成部分3.Modbus 的通信协议4.Modbus 的使用方法5.Modbus 的优点和局限性篇1正文1.Modbus 简介Modbus 是一种串行通信协议,最初由 Modicon 公司开发,用于在工业控制系统中传输数据。
如今,Modbus 已经成为了工业领域中广泛使用的通信协议之一,可以实现设备之间的数据交互和控制。
2.Modbus 的组成部分Modbus 主要包括三个组成部分:Modbus 主设备、Modbus 从设备和Modbus 通信协议。
- Modbus 主设备:负责发起通信请求,与从设备进行数据交互。
- Modbus 从设备:负责响应主设备的通信请求,发送或接收数据。
- Modbus 通信协议:定义了主设备与从设备之间的通信规则,包括数据格式、传输速率、校验方式等。
3.Modbus 的通信协议Modbus 通信协议基于串行通信,数据传输速率可调。
通信过程中,数据被组织成帧,包括起始符、地址、数据、校验和、结束符等部分。
Modbus 协议支持多种数据表示形式,如 ASCII 码、十六进制、浮点数等。
4.Modbus 的使用方法使用 Modbus 时,首先需要确保主设备和从设备之间的物理连接,如RS-232、RS-485 等。
然后,通过配置 Modbus 主设备的 IP 地址、子网掩码、网关地址等参数,建立与从设备的通信连接。
接下来,主设备可以向从设备发送请求帧,从设备收到请求后,发送响应帧。
最后,主设备根据响应帧中的数据进行相应的处理。
5.Modbus 的优点和局限性Modbus 的优点包括:- 广泛应用于工业控制系统,具有良好的兼容性和可扩展性。
- 支持多种数据表示形式,适应性强。
- 通信速率可调,满足不同应用场景的需求。
Modbus 的局限性包括:- 受到串行通信距离限制,通信距离较短。
- 在通信过程中可能出现数据丢失或损坏的情况。
Modbus通讯笔记注意事项
Modbus通讯笔记注意事项Modbus寻址Modbus地址通常是包含数据类型和偏移量的5个或6个字符值。
第一个或前两个字符决定数据类型,最后的四个字符是符合数据类型的一个适当的值。
Modbus主设备指令能将地址映射至正确的功能,以便发送到从站。
1 Modbus主站寻址Modbus主设备指令支持下列Modbus地址:(1) 00001至09999是离散输出(线圈)。
(2) 10001至19999是离散输入(触点)。
(3) 30001至39999是输入寄存器(通常是模拟量输入)。
(4) 40001至49999是保持寄存器。
所有Modbus地址均以1为基位,表示第一个数据值从地址1开始。
有效地址范围将取决于从站。
不同的从站将支持不同的数据类型和地址范围。
2 Modbus从站寻址Modbus从站指令支持以下地址:(1) 000001至000128是实际输出,对应于Q0.0——Q15.7。
(2) 010001至010128是实际输入,对应于I0.0——丨15.7。
(3) 030001至030032是模拟输入寄存器,对应于AIW0至AIW2。
(4) 040001至04XXXX是保持寄存器,对应于V区。
Modbus从站协议允许您对Modbus主站可访问的输入、输出、模拟量输入和保持寄存器(V区)的数量进行限定。
MBUS_INIT指令的参数MaxlQ指定Modbus主站允许访问的实际输入或输出(I或Q)的最大数量。
MBUS_INIT指令的MaxAl参数指定Modbus主站允许访问的输入寄存器(A丨W)的最大数量。
MBUS_INIT指令的MaxHold参数指定Modbus主站允许访问的保持寄存器(V存储区字)的最大数MBUS_CTRL 指令西门子Modbus主站协议库包括两条指令:MBUS_CTRL指令和MBUS_MSG指令。
MBUS_CTRL指令用于初始化主站通信,MBUS_MSG指令(或用于端口1的MBUS_MSG_P1)用于启动对Modbus从站的请求并处理应答。
Modbus通讯注意事项及测试
Modbus通讯注意事项及测试经常看到有很多同学在做Modbus通讯时,不知道如何设置参数,同时,如果通讯失败后,如何判断失败原因。
本文将重点介绍Modbus通讯的几个常见注意事项、通讯超时时间计算及常用的Modbus通讯测试工具。
很多同学在做Modbus通讯时,需要连续读取多个现场设备的数据,虽然也编写了Modbus轮询的程序,但是有时还是无法正常通讯。
有时虽然能够保证通讯,但是所有现场设备的轮询周期很长。
本文将从MBUS_CTRL的超时时间参数设置来说明超时时间设置的重要性。
一、通讯地址设定利用Modbus协议可以实现设备间的数据交换。
Modbus通讯理论上支持4种Modicon PLC地址,即0*、1*、3* 和4*四种,分别表示开出(中间线圈)、开入、模入、模出(中间寄存器)等数据地址。
与西门子或其它设备中的开入、开出、模入、模出地址完全不对应。
可以理解为0*和1*对应位地址的读写操作,3* 和4*字地址的读写操作。
此处0*、1*、3* 和4*表示长度有的为5位数字、有的为6位,其实和Modbus通讯无关,只是和软件的表示方式有关。
按照Modbus通讯时最常用的是RTU读请求格式:从站地址(1个字节)、功能代码(1个字节)、从站数据起始地址(2个字节)、读数据长度(2个字节)、CRC校验(2个字节)可见,只需设置起始从站数据区起始地址和通讯长度即可。
特别注意,Modbus地址遵从IEC1的地址标准(最小地址为*1),西门子遵从IEC0的标准(最小地址为0,如M0.0)。
因此,不同标准的地址做通讯时需要做地址变换,即加1的操作。
二、通讯故障诊断在做Modbus通讯时经常会出现通讯失败的现象,如果判断是程序问题还是别的问题,其实完全可以利用常见的Modbus测试软件来判断。
常见的Modbus测试软件有Modscan和Modsim。
也可以使用常见的串口调试工具软件,如SSCOM42等。
其中Modscan软件可以读取Modbus从站的数据,如果利用Modscan软件可以建立连接,但是设备间直连后无法通讯,问题可以在RS485极化、主站上。
modbus 功能码16用法
modbus 功能码16用法Modbus是一种广泛应用于工业控制的通信协议,其功能码16在Modbus协议中表示“读取保持寄存器”功能。
在本文中,我们将介绍Modbus功能码16的用法,包括其功能、参数、应用场景以及注意事项。
一、功能介绍Modbus功能码16用于从指定的从设备读取一组保持寄存器的内容。
该功能允许从设备将数据存储在保持寄存器中,而不需要定期刷新。
通过使用功能码16,主设备可以读取这些保持寄存器的值,从而实现与从设备的通信。
二、参数说明1. 功能码:Modbus功能码16,表示读取保持寄存器。
2. 从站设备地址:指定要读取的从站设备的地址。
3. 起始地址:指定要读取的保持寄存器的起始地址。
4. 寄存器数量:指定要读取的保持寄存器的数量。
三、应用场景1. 数据记录:从设备(如传感器、执行器等)将数据存储在保持寄存器中,以便在系统不运行或断电时保留数据。
主设备(如PLC、PC 等)定期使用功能码16读取这些保持寄存器的内容,以获取数据记录。
2. 调试和诊断:在调试和诊断过程中,主设备可以使用功能码16来读取从设备的保持寄存器,以检查从设备的工作状态和数据。
3. 远程监控:通过Modbus协议,主设备可以远程读取从设备的保持寄存器,实现远程监控和故障诊断。
四、注意事项1. 保持寄存器限制:从设备可能有限制保持寄存器数量的政策。
确保只读取从设备允许的范围之内。
2. 数据校验:在读取过程中,主设备应该对从设备返回的数据进行校验,以确保数据的准确性和完整性。
3. 从站设备的支持:确保所选从站设备支持Modbus协议,并正确实现功能码16功能。
4. 网络稳定性:在较长距离或复杂网络环境下使用Modbus时,需要考虑网络稳定性问题,以确保数据传输的准确性。
5. 协议版本和实现:根据实际需求选择合适的Modbus协议版本,并确保主设备和从设备都按照相同的协议版本实现。
五、代码示例以下是一个使用Python和pymodbus库的示例代码,展示了如何使用Modbus功能码16读取保持寄存器:```pythonfrom pymodbus.client.sync import ModbusTcpClient# 创建Modbus客户端对象client = ModbusTcpClient('localhost')# 连接到Modbus服务器client.connect()# 从站设备地址和起始地址address = 0x0000register_count = 10 # 要读取的保持寄存器数量# 读取保持寄存器内容response = client.read_holding_registers(address, register_count)if response.isError():print("读取保持寄存器失败")else:print("保持寄存器内容:")for i in range(register_count):print(response.registers[i], end=' ')print()# 断开连接client.close()```通过以上介绍和示例代码,我们能够更好地理解和应用Modbus功能码16在工业控制中的用法。
modbus通信master轮训正规写法
modbus通信master轮训正规写法在进行Modbus通信Master轮询时,按照正规的写法,我们需要遵循特定的格式和规范。
以下是对Modbus通信Master轮询正规写法的详细讨论:一、Modbus通信简介Modbus是一种通信协议,用于在不同设备之间进行数据传输和通信。
它通常被用于工业自动化和建筑物自动化系统中。
在Modbus通信中,Master是指发起通信请求的设备,而Slave是被请求的设备。
二、Modbus通信Master轮询的基本原则1. 连接建立:Master首先与Slave建立连接,确保通信通道畅通。
2. 请求发送:Master向Slave发送请求,并指定要读取或写入的寄存器地址。
3. 响应接收:Slave接收到Master的请求后,根据请求的指令执行相应的操作,并将结果反馈给Master。
4. 结果解析:Master接收到Slave的响应后,解析响应结果,获取所需的数据或确认写入操作是否成功。
5. 轮询重复:根据需要,Master可以轮询多个Slave设备,以获取或写入相应的数据。
三、Modbus通信Master轮询的具体步骤1. 准备通信环境和工具:在开发或使用Modbus通信Master轮询之前,需要确保有相应的Modbus通信库或工具,可以提供必要的函数和方法实现通信功能。
2. 初始化Master设备:在程序中,首先需要初始化Master设备,包括设置通信参数、串口配置、连接确认等。
3. 建立连接:使用通信库提供的函数或方法,Master设备与特定的Slave设备建立连接,确保通信可靠。
4. 编写请求代码:根据需要,编写请求代码,包括读取或写入寄存器的地址、寄存器数量或写入的值等。
根据Modbus协议,使用不同的功能码实现不同的操作。
5. 发送请求:将编写好的请求代码发送给Slave设备,等待响应结果。
6. 等待响应:在发送请求后,Master设备需要等待Slave设备的响应。
MODBUS主站通讯时的注意事项

有关 TSXSCP114卡及TSXSCY21601/TSXSCY11601 模块在Premium/Micro PLC 中作为MODBUS主站通讯时的注意事项目录1.前言 (2)2.TSXSCPCM4030的接线 (2)3.TSXSCYCM6030的接线 (3)4.ANSWER DELAY 的参数设置 (4)5.NUMBER OF RETRIES 参数设置 (5)6.CHARACTER DELAY 参数设置 (5)7.通讯管理字 (6)7.1详细的错误代码: (7)7.2超时时间设置 (8)8.通讯函数调用 (9)9.其他注意事项 (10)1. 前言近来发现有些客户反映在应用SCP114或SCY21601/ SCY11601模块作为MODBUS (RTU模式)主站与其他从站设备以RS485方式通讯时,有通讯不畅或不能采集到数据的情况。
经对部分客户的现场调查,发现有部分原因是由于对SCP114或SCY模块的的配置及应用程序编写不当而引起。
本文指出其中一些需要注意的问题,望大家在以后使用SCP114卡或SCY21601/SCY11601时注意一下。
2. TSXSCPCM4030的接线应用TSXSCP114卡作MODBUS RTU RS485方式通讯时,采用的连接的电缆应选择TSXSCPCM4030电缆。
原先手册中的接线如下:请注意的新订的TSXSCPCM4030电缆的颜色编码已经改变为如下:当TSXSCP114卡连接作为网络中间节点时,只需要将绿线(D-)与棕线(D+)接入网络。
但当TSXSCP114卡连在未端应按未端的接法接线,如下图所示:即在未端时,加上终端电阻及上拉下拉电阻,以提高线路的通讯性能。
对于最后一个从站也应加上终端电阻以防止信号反射引起通讯不稳定。
有些从站上本身带有终端电阻可以通过拔码设置,有些从站设备本身没带终端电阻需要并接一个120欧姆左右的电阻,具体情况可视最后一个从站设备而定。
modbus TCP主站设置
MODBUS TCP/IP主站设置
可以通过MODBUS TCP/IP协议,在局域网内对对触摸屏进行远程的通信与控制。
屏做主站的设置:
一、设置IP
首先使用拨码开关1、3设置触摸屏的IP地址和端口号,该例中设置主站屏的IP地址为:192.168.1.61,端口号为:502。
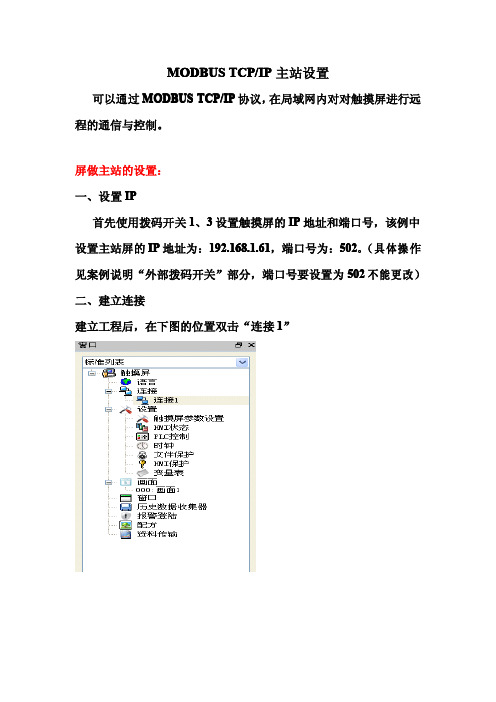
(具体操作见案例说明“外部拨码开关”部分,端口号要设置为502不能更改)二、建立连接
建立工程后,在下图的位置双击“连接1”
弹出“通讯口属性”对话框(如下图示)
在上图所示的对话框中,进行下列设置:
*连接接口:选择为“以太网”(如图所示)
*HMI位置:选择为“本机”(如图所示)
*连接服务:选择为“Mosbus”-“Modbus Master TCP/IP"
(如图所示)
在弹出的“通讯口属性”对话框点击“参数”,进入下图所示对话框设置IP地址和端口号,“地址模式”选择为“扩展模式”。
设置完成点击“确定”。
(端口号为:502)
三、在画面上做相应的控件
如下图做几个从站的画面,从站号为从站ip地址的第四个地址(例如:从站1IP地址为192.168.1.31从站号为31,从站2IP地址为192.168.1.30从站号为30,从站3IP地址为192.168.1.200从站号为200。
)
从站1地址输入画面:
从站2地址输入画面:
从站3地址输入画面:
做完上述设置,将程序下载到屏内,将主从站连接到路由器或者直接连接,进行监视和控制操作。
注:1、屏做从站时使用的地址为屏的内部地址。
2、端口号设置为502。
“MODBUS”常见问题解答

“MODBUS”常见问题解答“MODBUS”常见问题解答1. 我的设备支持modbus设备,能否直接与组态王软件连接?只要设备是标准的modbus 协议设备,即可使用组态王设备列表下的PLC-->莫迪康-->MODBUSRTU(或者ACSII 码)进行通信。
但具体的寄存器地址对照表必须从设备厂家索取。
2. 我的支持modbus 协议的串口设备,能否与多个上位软件(比如组态王软件和某品牌触摸屏)同时通讯?因为modbus 串口协议不支持多主站,所以不能多个软件同时与modbus 设备同时通信。
3. 在组态王工程中建立多个modbusTCPIPserver 设备定义,分别使用两台客户端对其访问,只有站点高的那个server 通讯ok,站点低的通讯失败,为什么?这是因为在组态王软件中只支持建立一个modbusTCPIPserver,当建立多个server 时,组态王客户端则会自动与站点高的server进行通讯,所以会导致站点低的通讯失败。
4. 如何实现组态王数据通过串口或者以太网驱动方式传送到其他组态软件或者应用程序中?如果其他组态软件或者应用程序支持modbus 协议,则可以通过组态王提供的modRTUserver 或者modbusTCPserver 驱动来实现。
5. 组态王与支持Modbus协议的设备进行通讯时,组态王画面上显示的数据不正确常有哪些原因?引起数据不正确的原因主要有如下几点:1)组态王中定义的寄存器地址跟实际设备不一致导致。
比如某些使用modbus 协议通讯的设备的数据地址是从0 开始的,而组态王modbus 协议驱动寄存器地址是从1 开始的,所以遇到此种情况时在组态王中定义变量时,寄存器地址要进行加1 处理;2)数据词典中最大原始值和最大值定义不不当;比如最大原始值和最大值不一样会导致画面看到的数据和实际设备不一致;3)组态王读取FLOAT 和LONG 类型的数据时,没有使用提供的SwapF 和SwapL 寄存器来调整FLOAT 型和LONG型数据的字节顺序;4)LONG 或FLOAT 型的双字的数据,没有按照间隔隔地址方式定义;因为modbus 协议所对应的参数地址一般按照字为基本单位进行分地址排序的。
关于200PLC modbus通讯的注意点
关于200PLC modbus通讯的注意点
在学西门子200PLC的modbus主站通讯编程时,发现下图中这样一个问题,如果我想用MBUSTCRL的完成位作为MBUSMSG的初始化启动,我必须要在他们中加一个先复位一下M0.0,不懂这是为什么呢?我的原来的想法是,当我PLC运行,我MBUSTCRL的完成位M0.0接通的话,我直接触发M0.1就行了嘛,但是这样做,好像运行不起来,不知道这是为什么?
图片说明:1,1
最佳答案
因为”正向转换”和”负向转换”指令要求执行”打开至关闭”或”关闭至打开”转换,您无法在首次扫描时检测上升沿或向下沿。
在首次扫描中,S7-200设置由这些指令指定的位状态。
在其后的扫描中,这些指令无法检测指定位的转换。
所以在首次扫描中m0.0不能触发上升沿P,需要延后一个扫描周期!!(可以看一下沿触发指令的工作原理)。
modbus 通讯常见问题
Modbus 通讯常见问题这里不介绍过多Modbus的原理和理论,我也不熟悉。
废话少说,直接开始常见问题。
1、接线问题:现在大部分采用两线制(四线制较少用,这里不介绍)接线方式,采用屏蔽双绞线。
大部分厂家的接线端子标识为:A、B,但是由于各厂家之间的有可能采用的规范不太一样,有的A是正极,有的B是正极,再加上有第三方设备接线混乱,正负经常接反。
通讯之前干两件事:a)第三方设备,也就是从站线接好,用万用表量线间电压,通常会量到1~5V(个别的会到8V)的电压,没有电压,通讯肯定不通,检查线路和接线,以及第三方设备;b)量到电压,判断正负,接到主站设备对应端子上来。
2、信号源问题:确认线路正常,通讯配置及读取地址正确,通讯还是不通,有可能就是信号源的问题。
信号源的问题通常是信号衰减或者有干扰源。
Modbus通讯的理论距离是1200M,距离越长,信号衰减越厉害,加上有一些电缆质量较差,衰减更厉害。
干扰源就不用介绍了。
解决的方法如下:a)信号衰减:更换质量更好的电缆,或者在通讯电缆中间加中继器(优点可以延长Modbus通讯的理论距离,缺点是需要供电);b)干扰源:最理想的方法是排除干扰源(比较艰难)。
也可以尝试更换屏蔽效果更好的电缆,尽量减少和供电电缆放到一起。
另外,有些设备Modbus接线端子没有终端电阻,可以在电缆两端各并联一个终端电阻(电阻为120欧,哪端如果有,就不用加了,具体有没有查看设备样本,一般都会有说明)。
3、通讯配置:主从站配置(波特率、数据位数、停止位数、奇偶校验)一致就可以,不多说了。
4、通讯地址:这个是问题最多的,下面我把自己碰到问题列出来及解决方法列出来,供大家参考。
a)地址偏移:有时会发现第三方设备给你的地址表和你自己读取的不一致,甚至是读不出来,你可以尝试往前或往后读一位,比如说,地址是40001,你可以尝试读取40000或者40002;b)读取数量:有一些设备寄存器较小,读太多和通讯错误;还有一些设备,主站读取数量必须与从站一致,比如说,16位模拟量有三个,你就只能读取三个,数字量有7位,你只能读取7位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
有关 TSXSCP114卡及TSXSCY21601/TSXSCY11601 模块在
Premium/Micro PLC 中作为MODBUS主站通讯时的注意事项
目录
1.前言 (2)
2.TSXSCPCM4030的接线 (2)
3.TSXSCYCM6030的接线 (3)
4.ANSWER DELAY 的参数设置 (4)
5.NUMBER OF RETRIES 参数设置 (5)
6.CHARACTER DELAY 参数设置 (5)
7.通讯管理字 (6)
7.1详细的错误代码: (7)
7.2超时时间设置 (8)
8.通讯函数调用 (9)
9.其他注意事项 (10)
1. 前言
近来发现有些客户反映在应用SCP114或SCY21601/ SCY11601模块作为MODBUS (RTU模式)主站与其他从站设备以RS485方式通讯时,有通讯不畅或不能采集到数据的情况。
经对部分客户的现场调查,发现有部分原因是由于对SCP114或SCY模块的的配置及应用程序编写不当而引起。
本文指出其中一些需要注意的问题,望大家在以后使用SCP114卡或SCY21601/SCY11601时注意一下。
2. TSXSCPCM4030的接线
应用TSXSCP114卡作MODBUS RTU RS485方式通讯时,采用的连接的电缆应选择TSXSCPCM4030电缆。
原先手册中的接线如下:
请注意的新订的TSXSCPCM4030电缆的颜色编码已经改变为如下:
当TSXSCP114卡连接作为网络中间节点时,只需要将绿线(D-)与棕线(D+)接入网络。
但当
TSXSCP114卡连在未端应按未端的接法接线,如下图所示:
即在未端时,加上终端电阻及上拉下拉电阻,以提高线路的通讯性能。
对于最后一个从站也应加上终端电阻以防止信号反射引起通讯不稳定。
有些从站上本身带有终端电阻可以通过拔码设置,有些从站设备本身没带终端电阻需要并接一个120欧姆左右的电阻,具体情况可视最后一个从站设备而定。
3. TSXSCYCM6030的接线
应用TSXSCY21601 / TSXSCY11601通讯模块 作MODBUS RTU RS485方式通讯时应采用TSXSCYCM6030通讯电缆,其不作为未端使用时接线方式如下:
SCP114
2#Temperature meter
3#
protection
1# Power meter
Premium PLC
C P U
若作未端连接时则应如下方式连接:
注意:上述图中D(A)为D-, D(B)为D+。
图中TSXSCA50 为施耐德电气提供的接线盒。
4. ANSWER DELAY 的参数设置
在TSXSCP114及TSXSCY21601的配置中都answer delay的参数设置,如下图所示:
此Answer delay参数设置的目的是当主站发出请求之后,若在此参数规定的时间没有任何信息响应,则主站会根据Retries中的设置重新发出新的请求。
如上图所示,当请求发出后在1秒之内主站没能收到任何数据响应,随后会重新发送一请求。
若请求发出之后,在1秒之内收到数据,无论此数数据是否正确则不会重新发出请求。
Answer Delay参数隐含设置为1秒,可以根据下列情况来调整:
若从站响应的延迟时间较长,可以将此时间适当延长。
如:读取数据的设备本身不是MODBUS从站,需要通协议转换读取数据,此时通过现场设备、协议转换器所需要的时间可能会超过1秒,在这种情况下需要将此参数调整为更长的时间。
否则永远无法读到此设备的数据,或由于从站的较长响应延时导致数据冲突,产生较多的CRC错误。
若从站响应较快可以将此时间参数缩短,以避免偶尔的无数据响应导致较长的等侍时间,可以提高整个网络的通讯效率。
尤其在有多从站的应用中,我们可能会重点关注整个网络上所有从站的数据刷新时间,当某从站通讯有问题时希望尽快跳过此站,在此种情况下可以将此参数调整为较小的时间,如:300ms 或 500ms等。
通常情况下,建议将此参数设为500ms
5. Number of Retries 参数设置
在TSXSCP114及TSXSCY21601模块作MODBUS主站时,在其参数配置中也同样都有Number of Retries参数设置。
如下图所示:
此参数设置的目的是当从站没有数据响应时,主站重新发送请求偿试通讯的次数。
此参数隐含设置3次。
建议在实际应用将此参数调整为1次,通常若重试1次后仍收不到数据响应,往往是从站设备不存在或本身有问题,此时再重试多次没有实际的意义。
在有很多从站的应用中,若关注重点为快速轮询则可以将此重试次数设为0。
6. Character Delay 参数设置
如下图所示,在TSXSCP114卡及SCY21601模块配置为MODBUS主站时,有“Delay between
characters”的参数设置。
此参数为判断某一数据帧传输结束的静默时间长度。
MODBUS RTU 数据帧间隔
在MODBUS RTU方式通讯中,对MODBUS 数据帧间隔是有一定要求的,通常两个数据帧之间的间隔时间要大于传输3.5个字符的时间。
在19200bps的传输速率时,此时间为1.75ms。
在9600bps时,此时间为3.5ms左右。
所以在配置参数中当通讯速率为9600时,其隐含的值通常为4ms,即到总线静默4ms之后表明前一数据帧结束可以传输下一数据帧。
示波器波形分析
如上图中所示,此参数会影响前一响应到下一请求之间的时间间隔。
假如现场从站设备不符合MODBUS串行通讯的标准要求,在总线静默时间超过3.5个字符时长不能判别前一数据帧通讯已经结束则需要加大此参数值,否则会导致从站无法识别新的MODBUS请求,导致从站无数据响应。
尤其在多从站通讯时,导致数据效率大降低或无法完成数据交换。
(如:DY2000的温度巡检仪就有此问题,在4ms内它不能识别数据帧的结束,需将将此值调整10~15ms左右)
7. 通讯管理字
在Premium、Mirco PLC的通讯函数中,最后的参数为4个字的通讯管理字表
如上图中所示的READ_VAR函数中,最后的通讯管理字为%MW137:4 。
通讯管理字表的含义如下:
%MWx:4 高字节低字节
%MWx 通讯交换号通讯激活状态(最低位)
%MWx+1 操作报告通讯报告
%MWx+2 超时时间(时基为100ms)
%MWx+3 长度(发送或接收的字节数)
通讯交换号指每次触发通讯时,系统会自动给出一个编号。
可以根据此编号将某一次通讯取消(CANCEL 函数)。
通讯激活状态为此字节最低位(%MWx:X0),当此位为1表示通讯正在进行,为0表示通讯结束。
通讯报告指通讯链路建立时的错误情况。
操作报告指当数据交换可以实现但数据有误时的错误情况。
超时时间指在CPU管理此通讯时允许的规定时间。
若此值设为0表示无超时设置,无数据响应或无错误报告时会始终处于等待状态。
此参数设置的时间基值为100ms, 例设值为3,表示超时时间为300ms。
在通讯管理字表中,前两个字由系统进行自动管理,应用程序中不能对这两个字作任何的赋值操作。
7.1 详细的错误代码:
操作报告
此报告字节对应于各个功能,用于指明对远程应用程序进行操作的结果。
仅当通讯报告具有以下值时,此报告才有效:
16#00(交换正确)
16#FF(消息被拒绝)
7.2 超时时间设置
对于超时时间设置建议如下:
1.在通讯管理字表的第三个字中,必须设置超时时间。
以防止当某次通讯无响应时,导致通讯始终处于等待状态,无法触发下次通讯。
建议编写程序时,在通讯函数执行之前对超时
时间进行赋值,防止在从重新下载程序之后忘记超时时间的设置。
如下图所示:
2. 超时时间的设值,建议 超时时间=3* Answer delay* ( reties +1 )
8. 通讯函数调用
在Premium 系统中对于通讯函数的调用有一定的限止,在同一扫描周期内每个通讯端口同时处于激活状态的通讯函数数量为4个(最新的版本中说明为8个,但建议在程序设计中仍以4个为设计标准)。
当有多个从站需要进行通讯,或对单个从站有多个读写通讯函数时需要注意通讯函数触发的调度。
如:按秒调度,前一秒种读取1号与2号从站数据,后一秒种读取5、6、7、8号从站的数据,通过秒脉冲对内部字及触发条件进控制:
1#温度巡检仪
7# 电表 Premium PLC
C P U
2#温度巡检仪
SCY21601
5# 电表 6# 电表 8# 电表
再利用触发条件控制通讯函数:
另外在每个通讯函数之前必须加对激活状态的控制,如上图所示。
9. 其他注意事项
○1根据不同的通讯方式,选择正确的通讯电缆。
○2注意EMC及接地。
○3注意各站之间通讯参数的一致性。