Universal Robots推出UR3新型机器人——全球最灵活轻便的台式机器人亮
2023年3月青少年机器人技术等级考试理论综合试卷三级真题(含答案)

2023年3月青少年机器人技术等级考试理论综合试卷三级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)1.Arduino UNO/Nano主控板,电位器连接到A0引脚,下图程序运行时,变量potVal值的范围是?()A.0~1B.0~255C.0~1023D.255~1023试题编号:20230310150646499试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:2.常用的舵机属于?()A.传感器B.执行器C.控制器D.感知器试题编号:20230310150645593试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:3.我国居民生活用电采用的是?()A.380V的交流电B.380V的直流电C.220V的交流电D.220V的直流电试题编号:20230310150645625试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:4.下列选项中,用于表示电流单位名称的是?()A.安培B.伏特C.欧姆D.法拉试题编号:20230310150645906试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:5.Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。
电路搭设及程序如下图所示,当光照强度逐渐增强时,LED的亮度逐渐减弱,此时红框A对应的程序是?()AB.C.D.试题编号:20230310150646845试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:6.下列选项中,属于导体的是?()A.橡皮擦B.干燥的木棒C.蒸馏水D.自来水试题编号:20230310150645672试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:7.Arduino UNO/Nano主控板电路搭设如下图所示,通过引脚6控制LED灯,能让LED灯点亮的程序模块是?()A.B.C.D.试题编号:20230310150646704试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:8.如图所示电路,下列说法错误的是?()A.该电路是串联电路。
2024年3月青少年机器人技术等级考试理论综合试卷三级真题及答案

2024年3月青少年机器人技术等级考试理论综合试卷三级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1.流程图图例如下,与该图例功能对应的选项是()。
A. 开始/结束B. 输入/输出C. 判断D. 处理标准答案:A。
2.题Arduino UNO/Nano主控板,在Mixly程序中使用变量保存电位器模块的返回值,下列选项中,该变量的数据类型最适合的是()。
A. 整数型B. 小数(浮点)型C. 字节型D. 布尔型标准答案:A。
3.下列选项中,属于导体的是()。
A. 橡皮擦B. 干燥的木棒C. 蒸馏水D. 220Ω电阻标准答案:D。
4.程序如下图所示,该程序结构对应是()。
A. 顺序结构B. 选择结构C. 循环结构D. 单分支结构标准答案:A。
5.下列选项中,用于表示电流单位的是()。
A. AB. VC. ΩD. U标准答案:A。
6.一般情况下,下图程序模块对应的器件类别是()。
A. 传感器B. 感受器C. 执行器D. 控制器标准答案:C。
7.程序如下图所示,该程序中循环体被执行的次数是()。
A. 1次B. 2次C. 5次D. 9次标准答案:C。
8.题Arduino UNO/Nano主控板,通过超声波传感器控制板载LED灯,程序模块如下,当超声波传感器返回的距离为10cm时,下列说法正确的是()。
A. 板载LED灯点亮。
B. 板载LED灯熄灭。
C. 板载LED灯闪烁。
D. 板载LED灯先点亮,然后保持熄灭。
标准答案:B。
9.题Arduino UNO/Nano主控板,下图程序运行时,板载LED灯闪烁5次,变量i的值是()。
A. 1B. 2C. 3D. 10标准答案:B。
10.超声波测距模块如下,下列选项中说法错误的是()。
A. 通过该程序模块可以获得超声波传感器的返回值B. 模块返回的距离单位是毫米C. 超声波传感器通过引脚2接收触发信号D. 超声波传感器通过引脚5返回检测数据标准答案:B。
Universal Robots 有限公司(优傲机器人)简介
公司简介Universal Robots有限公司 (优傲机器人)简介Universal Robots (优傲机器人) 致力于开发具有广泛可用性的机器人技术。
这家位于丹麦欧登塞市的公司开发并推广独特的工业机器人。
UR机器人可以在所有工业生产领域实现自动化和合理化,UR机器人具备成本效益高、高度灵活、且使用方便安全等特点,广获业界青睐。
历史2003年Universal Robots (优傲机器人) 的创立是基于一个“要研发一种易于安装和使用的轻型机器人”的理念。
公司的3位创始人艾斯本.奥斯特加、卡斯帕.斯特伊和克里斯汀.卡索在为南丹麦大学研发食品行业的特殊需求项目时得出结论,当时机器人市场的主要产品是大型、昂贵且笨拙的机器人。
2005年以此结论为基础,3位工程师于2005年创立了Universal Robots公司,并宣布致力开发中小企业也能承受的机器人技术。
公司创立时获得了丹麦公共投资基金Syddansk创新投资基金的投资,并得以成立。
2008年丹麦国家投资基金批准了Syddansk创新投资基金的企划书并会同Syddansk创新投资基金参与了对Universal Robots (优傲机器人) 的投资和管理。
2009年第一批UR5机器人通过经销商寻找到了丹麦和德国的用户。
2010年Universal Robots (优傲机器人) 业务覆盖了整个欧洲。
2011年Universal Robots (优傲机器人) 在中国设立代表处,开始拓展亚洲市场。
2012年Universal Robots (优傲机器人) 建立覆盖六大洲的经销商网络。
投放第二款产品——UR10机器人并在美国建立代表处公司由管理层、公共及私人投资基金拥有,财务状况良好,资金储备充裕。
2013年Universal Robots (优傲机器人) 在中国上海建立子公司—优傲机器人(上海)有限公司,组建更为强大的销售和技术支持团队,进一步扩大对中国市场的投入。
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
2023年12月青少年机器人技术等级考试理论综合试卷三级真题及答案

2023年12月青少年机器人技术等级考试理论综合试卷三级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)1.题下列选项中,关于光敏电阻描述正确的是?()试题编号:20231123210315146试题类型:单选题标准答案:B2.题正常情况下,通过Vin引脚给Arduino UNO/Nano主控板供电时,输入的电压范围是?()试题编号:20231123210314693试题类型:单选题标准答案:D3.题下列选项的名称中,与欧姆定律无关的选项是?()试题编号:20231123210314958试题类型:单选题标准答案:D4.题以下对Arduino的描述中,正确的是?()试题编号:20231123210314535试题类型:单选题标准答案:C5.题Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。
电路搭设及程序如下图所示,当试题编号:20231123210315976 试题类型:单选题 标准答案:A6.题一个完整的控制装置由传感器、控制器和执行器组成,以人做类比,人的大脑类似于?()试题编号:20231123210315099试题类型:单选题标准答案:B程序模块如下,关于该模块功能描述正确的是?()7.题试题编号:20231123210315521试题类型:单选题标准答案:A题控制装置中,接收主控板发出的电信号,并将电信号转化为其他形式信号的器件是?()试题编号:20231123210314582试题类型:单选题标准答案:A程序模块如下,串口监视器输出的值是?()9.题试题编号:20231123210315458试题类型:单选题标准答案:A10.题下列电路符号中,用于标识二极管的是?()试题编号:20231123210314740试题类型:单选题标准答案:A11.题Arduino UNO/Nano主控板,下图程序运行时,下列说法正确的是?()试题编号:20231123210315913试题类型:单选题标准答案:B12.题通过引脚6点亮LED灯,电路搭设如下图所示,通常情况下,图中和电阻相连的导线应连接到试题编号:20231123210315819试题类型:单选题标准答案:A13.题程序模块如下,串口监视器输出的值是?()试题编号:20231123210315568试题类型:单选题标准答案:B下列选项所示流程图中,与下图程序模块对应的是?()14.题试题编号:20231123210315396 试题类型:单选题标准答案:A15.题Arduino UNO主控板,具有模拟信号输入功能的引脚为?()试题编号:20231123210315052试题类型:单选题标准答案:A一般情况下,下列器件中,可用下图程序模块读取器件返回值的是?()16.题试题编号:20231123210315005试题类型:单选题标准答案:D17.题正常状况下,1节五号干电池的电压与人体的安全电压分别是?()试题编号:20231123210314644试题类型:单选题标准答案:B一般情况下,下列器件中,可使用下图程序模块的是?()18.题试题编号:20231123210315772试题类型:单选题标准答案:B19.题下列选项中,可用于保存小数的数据类型是?()试题编号:20231123210315615试题类型:单选题标准答案:DArduino UNO/Nano主控板,下图程序运行时,板载LED灯闪烁的次数是?()20.题试题编号:20231123210315866试题类型:单选题标准答案:D二、多选题(共5题,共10分)如图所示电路,当按键开关按下后,LED灯点亮的是?()21.题试题编号:20231123210315255试题类型:多选题标准答案:A|C22.题如图所示电路,下列说法正确的是?()试题编号:20231123210315193试题类型:多选题标准答案:A|B|C|D23.题下列模块中,属于选择(分支)结构的模块有?()试题编号:20231123210315663试题类型:多选题标准答案:A|B24.题下列选项中,表示元器件电源(正极)的符号标识有?()试题编号:20231123210314833试题类型:多选题标准答案:A|B|C25.题通常情况下,下列选项中,属于导体的是?()试题编号:20231123210314787试题类型:多选题标准答案:A|B|D三、判断题(共5题,共10分)26.题电路中,电源外部电流的方向是从正极流向负极。
2023年高考英语外刊时文精读专题02机器人的崛起
2023年高考英语外刊时文精读精练 (2)Rise of the robots机器人的崛起主题语境:人与社会主题语境内容:科学与技术【外刊原文】(斜体单词为超纲词汇,认识即可;下划线单词为课标词汇,需熟记。
)The word “robot” was coined(创造) in 1920 by the Czech playwright Karel感器), fast wireless communications and powerful, smaller computer chips(芯social care and much more.the pandemic(疫情)and some people have left the workforce(劳动rising numbers of boxes. They are even beginning to trundle(移动)slowly alongpandemic-ravaged world, short of workers but with lots of elderly folk to look after,And yet many people fear that robots will destroy jobs. A paper in 2013 by economists at Oxford University was widely misinterpreted(曲解) as meaningfor labour markets. Japan and South Korea have the highest robot penetration(渗透)but very strong workforces. A Yale University study that looked at Japanese manufacturing(生产)between 1978 and 2017 found that an increase of one robot unit per 1,000 workers boosted a company’s employment by 2.2%. Research from the Bank of Korea found that robotisation(机器自动化) moved jobs away from manufacturing into other sectors(领域), but that there was no decrease in overall vacancies(空位). Another study, by researchers at the Massachusetts Institute of Technology and colleagues elsewhere, looked at Finnishhiring.For all that, the march of the robots will bring big changes to workplaces. Theof lasers.make society as a whole better off. One lesson from the freewheeling(自由放纵的)globalisation of the 1990s and 2000s is that the growth in trade that wasbecause the losers felt left behind. That is one more reason why firms and governmentsand manage the robots that will increasingly be their colleagues.The potential gains from the robot revolution are huge. In Capek’s play, the robots revolt(反叛)against their human masters and cause mass unemployment and worse. The beginnings of the world’s real robots have not matched Capek’s satire (讽刺). There is no reason to think that their future needs to either.【课标词汇】1.artificial人造的,人工的;仿造的•clothes made of artificial fibres人造纤维质地的服装•an artificial heart人造心脏•an artificial lake人工湖•artificial fur/sweeteners/flowers人造毛皮/人造甜味剂/假花2.functional 实用的 ;作用的;功能的;(能)起作用的,工作的,运转的Bathrooms don't have to be purely functional. 浴室不必完全只为了实用。
2023年12月青少年机器人技术等级考试理论综合试卷三级(含答案)

2023年12月青少年机器人技术等级考试理论综合试卷三级(含答案)分数:100题数:30一、单选题(共20题,共80分)1.下列选项中,关于光敏电阻描述正确的是?(B)A.光敏电阻是由导体材料制作而成。
B.光照射光敏电阻时,光照越强,光敏电阻的阻值越小。
C.光敏电阻具有单向导通的特性。
D.在电路中,使用光敏电阻读取环境光强度的变化值,不需要串联电阻。
2.正常情况下,通过Vin引脚给Arduino UNO/Nano主控板供电时,输入的电压范围是?(D)A.5VB.5V~12VC.6V~20VD.7V~12V3.下列选项的名称中,与欧姆定律无关的选项是?(D)A.安培B.伏特C.欧姆D.瓦特4.以下对Arduino的描述中,正确的是?(C)A.Arduino是指硬件主控板B.Arduino是指Arduino语言C.Arduino主控板包含UNO和Nano等众多类型的主控板D.Arduino以闭源的方式进行推广5.关于Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。
电路搭设及程序如下图所示,当光照强度逐渐减弱时,LED的亮度变化是?(A)声明1drVal为整数并赋值01drVal赋值为模拟输入管脚#A01drVal赋值为映射1drVal从[1023,0]到[0,255]模拟输出管脚#6赋值为1drValA.LED灯逐渐变暗B.LED灯逐渐变亮C.LED灯闪烁D.LED灯无任何变化6.一个完整的控制装置由传感器、控制器和执行器组成,以人做类比,人的大脑类似于?(B)A.传感器B.控制器C.执行器D.闭环控制7.程序模块如下,关于该模块功能描述正确的是?(A)数字输出管脚#A0设为高A.A0引脚输出高电平数字信号B.A0引脚输出高电平模拟信号C.A0引脚输入高电平数字信号D.A0引脚输入高电平模拟信号8.控制装置中,接收主控板发出的电信号,并将电信号转化为其他形式信号的器件是?(A)A.执行器B.传感器C.数字信号D.模拟信号9.程序模块如下,串口监视器输出的值是(A)初始化声明A为字节并赋值255声明B为字节并赋值1.5声明C为字节并赋值0C赋值为A+BSerial打印(自动换行)CA.0B.0.00C.256D.256.5010.下列电路符号中,用于标识二极管的是?(A)A.B.C.D.11.关于Arduino UNO/Nano主控板,下图程序运行时,下列说法正确的是?(B)dist赋值为超声波测距(cm)Trig#2Echo#5如果dist≥5且dist≤10执行数字输出管脚#3设为高否则数字输出管脚#3设为低A.当超声波传感器返回的距离为12厘米时,引脚3输出高电平B.当超声波传感器返回的距离为8厘米时,引脚3输出高电平C.当超声波传感器返回的距离为3厘米时,引脚3输出高电平D.当超声波传感器返回的距离为0厘米时,引脚3输出高电平12.通过引脚6点亮LED灯,电路搭设如下图所示,通常情况下,图中和电阻相连的导线应连接到?(A)A.VCCB.GNDC.D0引脚D.D1引脚13.程序模块如下,串口监视器输出的值是?(B)初始化使用i从1到5步长为1执行switch i%3case0Serial打印‘*’case1Serial打印‘-’case2Serial打印‘+’A.*-+*-B.-+*-+C.+*-+*D.-*+-*14.下列选项所示流程图中,与下图程序模块对应的是?(A)如果执行A.B.C.D.15.关于Arduino UNO主控板,具有模拟信号输入功能的引脚为?(A)A.A0~A5B.D0~D13C.D3/D5/D6/D9/D10/D11D.D0~D13/A0~A516.一般情况下,下列器件中,可用下图程序模块读取器件返回值的是?(D)数字输入管脚#A0A.LEDB.电位器C.舵机D.按键模块17.正常状况下,1节五号干电池的电压与人体的安全电压分别是?(B)A. 1.5V24VB. 1.5V36VC.5V24VD.5V36V18.一般情况下,下列器件中,可使用下图程序模块的是?(B)模拟输出管脚#3赋值为0A.按键开关模块B.LED模块C.光敏电阻模块D.电位器模块19.下列选项中,可用于保存小数的数据类型是?(D)A.布尔型B.字节型C.整数型D.浮点型20.对于Arduino UNO/Nano主控板,下图程序运行时,板载LED灯闪烁的次数是?(D)初始化使用i从10到0步长为2执行数字输出管脚#13设为高延时毫秒500数字输出管脚#13设为低延时毫秒500A.5B.6C.10D.不确定二、多选题(共5题,共10分)21.如图所示电路,当按键开关按下后,LED灯点亮的是?(AC)A.电路AB.电路BC.电路CD.电路D22.如图所示电路,下列说法正确的是?(ABCD)A.当开关S断开时,整个电路断路。
2023年9月青少年机器人技术等级考试理论综合试卷四级真题(含答案)

2023年9月青少年机器人技术等级考试理论综合试卷四级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1.题Arduino C程序如下,当程序运行时,串口监|视器输出结果是()。
标准答案:C。
2.题Arduino C程序如下,当程序运行时,串口监|视器输出结果是()。
标准答案:B。
3.题Arduino C程序如下,该程序运行后在串口监|视器显示的内容是()。
标准答案:D。
4.题Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。
电路搭设及部分程序如下图所示,当光照强度逐渐增强时,LED的亮度逐渐减弱,此时红框A对应的程序是()。
A.B.C.D.标准答案:B。
5.题Arduino UNO/Nano主控板,电路搭设如下,下列选项中,实现按键开关按下后,LED熄灭的程序段是()。
A.B.C.D.标准答案:C。
6.题Arduino UNO/Nano主控板,读取超声波传感器的返回值,电路搭设和部分程序如下图所示,程序中红色方框A所对应的程序是()。
A.B.C.D.标准答案:B。
7.题Arduino UNO/Nano主控板,通过引脚3发送4个20微秒的低电平脉冲触发信号,时序如下图所示,下列程序正确的是()。
A.B.C.D.标准答案:C。
8.下列图示电路中,属于外部上拉电阻电路的是()。
标准答案:A。
9.如图所示电路,,当开关闭合时,下列选项中正确的是()。
A.B.C.D.标准答案:C。
10.题Arduino C语言中,下列选项中,用于表示二进制的前缀是()。
标准答案:A。
11.题Arduino C语言中,布尔型变量所对应的描述符是()。
标准答案:D。
12.题Arduino C语言,Serial类库提供的成员函数中,用于设置串口波特率的成员函数是()。
A.B.C.D.标准答案:A。
13.题Arduino C语言,下列选项所示变量名称中,符合要求的是()。
标准答案:C。
机器人试题库带答案

机器人题库〔带答案〕1.abb机器人属于哪个国家?〔C 〕A.美国B中国C瑞典D日本2.机器人控制柜发生火灾, 用何种灭火方式适宜?〔B 〕A.浇水B二氧化碳灭火器C泡沫灭火器D毛毯扑打3.在何处找到机器人的序列号?〔B 〕A控制柜名牌B示教器C操作面板D驱动板4.abb机器人的额定电压是多少?DA 24vB 36vC 110v D380v5.安川机器人属于哪个国家?〔A 〕A日本C挪威C俄罗斯D 美国6.abb可以允许有几个主程序main 〔A 〕A一B二 C 三D四7.在哪个窗口可以改变操作时的工具〔B 〕A程序编辑器B手动操作C输入输出D其它窗口8.哪条指令用来等待数字输入信号〔A 〕A WaitDiB WaitDoC DiWaitD WaitTime9.准确到达工作点用那个zone 〔D 〕A z1B z50C z100 DFine10.哪个zone可获得最圆滑路径〔D 〕A z1B Z5 Cz10 D z10011.哪个指令可最方便回到六轴的校准位置?〔C〕AMoveL BMoveJ CMoveAbsJ DArcL12.机器人速度是那个单位〔C〕?A /min B.in/min C.mm/sec D.in/sec13.哪条指令将数字输出信号置1 〔C 〕A SetB ResetC SetAOD PulseDo14.用何功能保存模块〔B〕A 程序另存为B另存模块为C另存工具为D系统另存为15.在哪个窗口可以定义机器人输入输出〔C 〕A 程序编辑器B 手动操作C 输入输出D 控制面板16.在哪个窗口可以标定机器人的零位〔C 〕A程序编辑器 B 手动操作 C 校准 D 控制面板17.在哪个窗口可以看到故障信息〔C 〕A 程序数据B 控制面板C 事件日志D 系统信息18.在急停解除后, 在何处复位可以使电机上电〔A 〕A控制柜白色按钮 B 示教器 C 控制柜部 D 机器人本体19.机器人手动操作时, 示教使能器要一直按住〔√〕20机器人四大家族是发那科, 安川电机, abb , 酷卡〔√〕21机器人工作时, 工作围可以站人〔X 〕22机器人不用定期保养〔X 〕23机器人可以做搬运, 焊接, 打磨等工程〔√〕24机器人可以有六轴以上〔√〕25程序模块只能有一个〔X 〕26对机器人进展示教时.作为示教人员必须事先承受过专门的培训才行.与示教作业人员一起进展作业的监护人员.处在机器人可动围外时,〔B〕, 可进展共同作业。
2023年3月青少年机器人技术等级考试理论综合试卷六级真题(含答案)

2023年3月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)1.ESP32 for Arduino I2C类库的成员函数beginTransmissio()中,下列描述正确的是?()A. 初始化,并作为主设备加入I2CB. 将向从设备发送的数据加入到发送数据队列C. 将从设备的地址加入到发送数据队列D. 将数据队列发送给从设备试题编号:20230310164543190试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:2.MPU6050姿态传感器的角速度传感器单元可以设置如下不同的量程,其中测量精度最高的量程是?()A. 250°/sB. 500°/sC. 1000°/sD. 2000°/s试题编号:20230310164543237试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:3.ESP32主控板通过网络连接到路由器,该主控板的工作模式是?()A. ClientB. STAC. APD. Server试题编号:20230310164542909试题类型:单选题标准答案:B试题难度:一般考生答案:B考生得分:4是否评分:已评分评价描述:4.SPI通信,主机向从机发送数据的数据线是?()A. SCLKB. MOSIC. MISOD. SDA试题编号:20230310164543269试题类型:单选题标准答案:B试题难度:试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:5.日常邮件发送,该操作对应TCP/IP四层模型中的?()A. 应用层B. 传输层C. 网络层D. 网络接口层试题编号:20230310164542800试题类型:单选题标准答案:A试题难度:试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:6.浏览网页,使用传输层的协议是?()A. HTTP协议B. TCP协议C. UDP协议D. IP协议试题编号:20230310164542847试题类型:单选题标准答案:B试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:7.共阳数码管和74HC595芯片连接如下图所示,数码管显示字符为“A”,下列选项中正确的程序是?()A.B.C.D.试题编号:20230310164543878试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:B是否评分:已评分评价描述:8.ESP32 for Arduino I2C类库的下列成员函数中,用于主设备向从设备发送读取数据请求的成员函数是?()A. Wire.begin()B. Wire.write()C. Wire.beginTransmission()D. Wire.requestFrom()试题编号:20230310164543159试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:9.ESP32 for Arduino,下列程序是ESP32主控板以AP模式,创建Web服务器的部分程序,程序中方框所对应的程序是?()A. WiFi.begin();B. WiFi.server();C. server.softAPConnect()D. server.begin();试题编号:20230310164543831试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D是否评分:已评分评价描述:10.ESP32 for Arduino SPI类库的下列成员函数中,用于设置数据传送方式的成员函数是?()A. SPI.begin()B. SPI.setBitOrder()C. SPI.setFrequency()D. SPI.setDataMode()试题编号:20230310164543316试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:11.HTTP请求报文头部的结束符是?()A. 回车符B. 换行符C. 空格D. 仅回车符+换行符试题编号:20230310164543628试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:12.步进电机类库AccelStepper的成员函数中,用于设定恒速转动时转动速度的成员函数是?()A. AccelStepper.setMaxSpeed()B. AccelStepper.setSpeed()C. AccelStepper.setCurrentPosition()D. AccelStepper.setAcceleration()试题编号:20230310164543581试题类型:单选题标准答案:B试题难度:考生答案:B考生得分:4是否评分:已评分评价描述:13.ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定为STA模式的成员函数是?()A. WiFi.begin()B. WiFi.softAP()C. WiFi.localIP()D. WiFi.softAPIP()试题编号:20230310164543659试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:14.关于步进电机,以下说法中不正确的是?()A. 步进电机转动采用电脉冲信号控制B. 步进电机转动的速度与脉冲频率成正比C. 步进电机是执行器D. 步进电机是开环控制,所以会产生误差累计试题编号:20230310164543362试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:15.下列选项中,用于检测网络环境下,设备之间是否连通的命令是?()A. ipconfigB. msconfigC. pingD. find试题编号:20230310164543550试题类型:单选题试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:16.ESP32 主控板与一个I2C接口的外设模块进行通信,模块的地址为0x3C,现欲向外设模块地址为0x2C的寄存器地址写入数据0xFF。
Universal Robots UR10 CB3 用户手册

用户手册UR10/CB3翻译自原有指示(zh)用户手册UR10/CB3版本3.2(rev.18629)翻译自原有指示(zh)序列号UR10/CB3:此处所包含的信息是Universal Robots A/S 的财产,未经Universal Robots A/S 事先书面许可,不得全部或部分复制其中的内容。
此处所包含的信息不应视为Universal Robots A/S 的承诺,并且其内容可能会更改,恕不另行通知。
本手册定期进行评审与修订。
对于本文档的任何错误或遗漏,Universal Robots A/S 概不负责。
版权所有©2009–2015by Universal Robots A/SUniversal Robots 徽标是Universal Robots A/S 的注册商标。
UR10/CB3ii 版本3.2(rev.18629).版权所有©2009-2015U n i v e r s a l R o b o t s A /S 。
保留所有权利。
目录前言ix 这些箱子里装的是什么 (ix)重要安全说明 (x)如何使用本手册 (x)哪里可以找到更多信息 (x)I硬件安装手册I-11安全I-31.1简介..............................I-31.2有效性和责任...........................I-31.3责任限制............................I-31.4该手册中的警告标志........................I-41.5一般警告和提醒..........................I-41.6拟定用途............................I-71.7风险评估............................I-71.8紧急停机............................I-91.9无电力驱动的移动.........................I-92安全相关的功能和接口I-112.1简介..............................I-112.2安全系统的停止时间........................I-112.3限制安全相关功能.........................I-122.4安全模式............................I-132.5安全相关的电气接口........................I-142.5.1安全相关的电气输入.....................I-142.5.2安全相关的电气输出.....................I-153运输I-174机械接口I-194.1简介..............................I-19版本3.2(rev.18629).版权所有©2 0 0 9 -2 0 1 5 U n i v e r s a l R o b o t s A / S 。
2023年9月青少年机器人技术等级考试理论综合试卷一级真题含答案

2023年9月青少年机器人技术等级考试理论综合试卷一级真题(含答案)分数:100 题数:45一、单选题(共30题,共60分)。
1.如图哪个工具是撬棍()。
A.aB.bC.cD.d标准答案:D。
2.如图使用门把手相当于使用了()。
A.滑轮B.齿轮C.斜面D.轮轴标准答案:D。
3.如图使用镊子时动力作用点是()。
A.aB.bC.cD.d标准答案:B。
4.如图下列选项中不能省力的是()。
A.aB.bC.cD.d标准答案:A。
5.如图,该滑轮组有几个定滑轮()。
A.0个B.1个C.2个D.3个标准答案:D。
6.下列齿轮组起减速作用的是()。
A.主动轮12齿,从动轮6齿。
B.主动轮6齿,从动轮18齿。
C.主动轮18齿,从动轮18齿。
D.主动轮6齿,从动轮6齿。
标准答案:B。
7.关于链传动说法正确的是()。
A.链条长度不能调节B.传动链和链轮需要在同一平面内安装C.每条传动链只能连接两个链轮D.同一个传动链连接的两个链轮转向相反标准答案:B。
8.如图,两齿轮平行啮合,a是主动轮,下列说法正确的是()。
A.两齿轮旋转方向相反B.齿轮组起加速作用C.齿轮组传动比是1:1D.a齿轮比b齿轮转速慢标准答案:A。
9.如图,以下哪个工具是费力杠杆()。
A.aB.bC.cD.d标准答案:C。
10.如图,从机械手表的内部结构图中我们能看到()。
A.链传动B.齿轮垂直啮合C.杠杆D.齿轮平行啮合标准答案:D。
11.下列哪个齿轮组是齿轮垂直啮合()。
A.aB.bC.cD.d标准答案:B。
12.如图可以配合该工具使用的零件是()。
A.aB.bC.cD.d标准答案:D。
13.下列机构中不能省力的是()。
A.斜面B.定滑轮C.滑轮组D.杠杆标准答案:B。
14.如图,盘山公路是什么的应用()。
A.齿轮B.定滑轮C.斜面D.杠杆标准答案:C。
15.关于齿轮平行啮合说法正确的是()。
A.平行啮合的两个齿轮转动方向相反B.齿轮只能平行啮合C.平行啮合的所有齿轮转动方向相同D.平行啮合的齿轮传动比都是1:1标准答案:A。
2022年12月青少年机器人技术等级考试理论综合试卷三级真题(含答案)
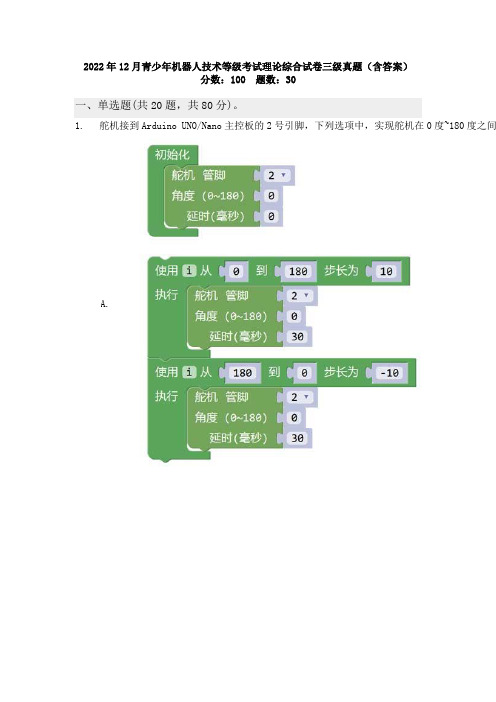
2022年12月青少年机器人技术等级考试理论综合试卷三级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1. 舵机接到Arduino UNO/Nano主控板的2号引脚,下列选项中,实现舵机在0度~180度之间A.B.C.D.标准答案:C。
2. 如图所示,串口监视器打印出的值为()。
A. 1B. 0C. -1D. 程序报错标准答案:C。
3. 一般情况下,在以下设备中,不可以作为电源的是()。
A. 干电池B. 蓄电池C. 发电机D. 继电器标准答案:D。
4. 将LED灯接在Arduino UNO/Nano主控板的3号引脚上,程序如图所示,LED灯的效果是()A. 持续点亮B. 持续熄灭C. 呼吸灯效果D. 不断闪烁标准答案:C。
5. Arduino UNO主控板的电路搭建以及对应的程序如图所示,随着光照强度的增加,LED灯的明A.LED 灯逐渐变暗 B.LED 灯逐渐变亮 C.LED 灯忽亮忽暗 D. LED 灯无任何变化标准答案:B 。
6. 一般情况下,人体的安全电压不超过()。
A. 12VB.36V C.110V D. 220V标准答案:B 。
7. 电路搭建如图所示,与之相对应的电路图是()。
A.B.C.D.标准答案:B。
8. 如图所示,若想让两盏LED灯交替闪烁,正确的程序是()。
A.B.C.D.标准答案:B。
9. 一般情况下,纯净水属于()。
A. 导体B. 超导体C. 半导体D. 绝缘体标准答案:D。
10. 如图程序执行后,串口监视器输出i的值为()。
A. 10B. 1C. -1D. 0标准答案:A。
11. 以下选项中属于传感器的是()。
A. 电机B. 蜂鸣器C. 电位器D. LED灯标准答案:C。
12. 以下关于串联电路的叙述中,错误的是()。
A. 串联电路中开关在任何位置都可以控制整个电路,也就是其作用与所在的位置无关B. 串联电路中,各个用电器的电流之和等于总电路的电流。
2024年3月青少年机器人技术等级考试理论综合试卷六级真题及答案

2024年3月青少年机器人技术等级考试理论综合试卷六级真题(含答案)分数:100 题数:30一、单选题(共20题,共80分)。
1.下列选项中,属于URL的是()。
A.B.C.D.标准答案:C。
2.下图所示的SPI外设原理图中,时钟数据线对应的是()。
A. AB. BC. CD. D标准答案:A。
3.关于MPU6050姿态传感器,下列描述错误的是()。
A. MPU6050是一个九轴传感器B. MPU6050集成了三轴陀螺仪C. MPU6050集成了三轴加速度计D. MPU6050集成了数字运动处理器标准答案:A。
4.题ESP32 for Arduino SPI类库,关于成员函数transfer()的功能,下列描述正确的是()。
A. 设置数据的传送方式。
B. 发送一个字节的数据,同时接收一个字节的数据。
C. 发送时钟数据。
D. 启动SPI通信事务。
标准答案:B。
5.下列选项中,关于IPV4说法错误的是()。
A. IPV4的地址长度是32位B. IPV4的地址分为4段C. IPV4地址各段用“.”隔开D. IPV4地址使用16进制数表示标准答案:D。
6.使用ESP32 for Arduino SPI类库,下列选项中,用于初始化SPI接口的成员函数是()。
A. SPI.begin()B. SPI.setBitOrder()C. SPI.setFrequency()D. SPI.setup()标准答案:A。
7.TCP/IP四层模型,从本机向外部发送网络数据时,数据在本机的传送顺序是()。
A. 应用层→传输层→网络层→网络接口层B. 网络接口层→网络层→传输层→应用层C. 应用层→网络层→传输层→网络接口层D. 网络接口层→传输层→网络层→应用层标准答案:A。
8.题ESP32 for Arduino 提供的WiFi类库的成员函数中,用于设定ESP32主控板为STA模式的成员函数是()。
A. WiFi.begin()B. WiFi.softAP()C. WiFi.localIP()D. WiFi.softAPIP()标准答案:A。
robotiq三指产品手册

robotiq三指产品手册【最新版】目录1.产品概述2.产品特点3.应用场景4.使用方法5.技术参数6.维护保养正文1.产品概述Robotiq 三指是一款集科技与实用性于一身的机器人产品。
这款产品以其独特的三指设计,强大的功能和广泛的应用场景,成为机器人领域的一大亮点。
2.产品特点Robotiq 三指的主要特点包括:(1)三指设计:这款产品的最大亮点就是其独特的三指设计,这使得它能够完成更多复杂的任务,例如抓取、搬运等。
(2)强大的功能:Robotiq 三指不仅具有强大的抓取功能,还能够进行精密的测量和检测,为各种工作提供便利。
(3)高精度:这款产品的三指设计使得其能够精确地抓取物品,误差控制在毫米级别,满足了高精度工作的需求。
3.应用场景Robotiq 三指的应用场景非常广泛,包括但不限于以下领域:(1)制造业:在制造业中,Robotiq 三指可以完成各种复杂的抓取和搬运工作,大大提高了生产效率。
(2)科研领域:在科研领域,Robotiq 三指的高精度和强大的功能为科研工作者提供了极大的便利。
(3)医疗领域:在医疗领域,Robotiq 三指可以帮助医生完成一些精密的操作,如手术等。
4.使用方法在使用 Robotiq 三指时,用户需要进行以下几个步骤:(1)安装:首先,用户需要将 Robotiq 三指安装到相应的设备上。
(2)设置:然后,用户需要对 Robotiq 三指进行一些基本的设置,如校准等。
(3)操作:最后,用户就可以通过控制设备来操作 Robotiq 三指,完成各种工作。
5.技术参数Robotiq 三指的主要技术参数包括:(1)尺寸:长 xx 毫米,宽 xx 毫米,高 xx 毫米。
(2)重量:xx 千克。
(3)工作电压:xx 伏特。
(4)工作温度:xx 摄氏度。
6.维护保养为了保证 Robotiq 三指的正常工作和延长使用寿命,用户需要注意以下几点:(1)定期检查:用户需要定期检查 Robotiq 三指的工作状态,如发现异常需要及时处理。
2023年北京学生机器人智能大赛工程挑战赛题库
2023年北京市学生机器人智能大赛机器人工程挑战赛参照题目机器人工程挑战赛现场制作旳作品除竞赛规则规定旳内容外,至少应满足如下基本规定:1、至少使用一种控制器。
2、作品中有效运用传感器不少于3个。
3、动力装置旳使用不少于3个。
4、作品演示效果直观、简洁。
竞赛组委会鼓励使用多种机器人平台。
参照题目:01.读书小精灵——设计一种协助人们阅览纸质书籍旳机器人。
02.看我72变——机器人可以有多种截然不一样旳形态进行展示。
03.百尺竿头更深入——机器人沿着指定旳空间向上延伸,以初始状态和最终稳定状态下主控器抬升比例为原则。
04.我旳地盘我做主——机器人可以识别5种以上不一样特性(如重量、颜色、体积、形状、密度等)旳物体,并分类寄存。
05.芝麻开门:设计出具有自动开关门旳机器装置。
06.拓荒者——在自己设定旳情境中,通过机器人进行探索信息,运用机械构造处理问题。
07.机器人裁判——运用机器人技术取代或协助裁判员工作。
08.有我更以便——运用机器人技术辅助人们平常家居生活,处理生活中旳问题。
09.我要参与运动会——让机器人成为体育运动员进行竞技活动。
10.安全运送——在道路不畅通状况下,用多种形式安全精确旳将目旳物运送到目旳地。
11.如影随行——一种或多种机器人通过识别目旳信息到达随行旳目旳,提议具有自动识别导航旳功能尽量防止目旳旳丢失。
12.随我去旅行——制作一种机器人,在外出旅行中协助人们一同远足。
13.山峰都市——在一座建筑中提供应人们各个方面协助旳智能系统。
14.智能工具——以机器人操作工具为目旳,提高工作效率,延伸使用环境。
15.人与机器人旳结合——体现人机互动,重视互动效果、方式。
16.苹果成熟了——农业果实成熟后,机器人对其进行后续处理。
17.人体旳延伸——将人体旳五感通过机器人功能加以强化。
18.精确定位旳机器人——使用算法能在复杂运动中定位或精确前去目旳,重视稳定性。
19.翻墙机器人——体现机器人克服困难,到达目旳旳目旳。