接触分析1
abaqus七讲:abaqus接触分析

• ABAQUS/Standard中使 用的严格的主/从接触算法。 • 从属表面的节点不能 穿透到主控表面。 • 主控表面的节点可以 穿透到从属表面。
在多数情况下,ABAQUS/Explicit使用平衡的主/从算法。
• 两次应用单纯的主-从接触算法,并平均化。在第二次施加接触 约束时,交换主/从表面。 • 使接触物体之间的侵彻达到最小化。
变形体之间的有限滑动接触 这是最一般类型的接触。
例子:螺纹连接。 • 这些问题一般包含初始的过盈配合
由于过盈精度引起的 接触压力的分布
自接触
单个表面与它自身接触称为自接 触。在ABAQUS的二维和三维模 型中可用。 在分析过中,当表面严重变形时, 使用自接触将非常方便。对于某 些问题,在分析之前不可能确定 单个的接触区域,或者确定接触 区域是非常困难的。 把单个接触表面作为接触对定义 自接触,而不是通过两个不同的 表面定义。
SURF1 (刚体) SURF2
最小主应力云图
例子:橡胶垫片的压缩 (选自 “Self-contact ts: rubber gasket,” ABAQUS例子手册1.1.17 节)
变形体与刚体的接触:
表面之间的有限滑动(大位移)。 变形组件之间的有限应变。
讲接触非线性
概述
• 简介 • 主/从方法和隐含假设 • 定义双面接触概述 • 定义面的规则 • 局部表面行为 • 接触问题中点的相对滑动 • 接触问题中调整初始节点位置
• 接触输出
• 完全约束的接触行为 • 刚体
简介
• 什么是接触?
当两个实体接触时,力通过它们的接触表面传递。 • 在某些情况下,只传递垂直接触表面的力。
定义表面接触属性
*SURFACE INTERACTION选项定义表面接触属性。
abaqus第七讲:abaqus接触分析解析
北京怡格明思工程技术有限公司
Innovating through simulation
简介
• 什么是接触?
当两个实体接触时,力通过它们的接触表面传递。 • 在某些情况下,只传递垂直接触表面的力。
• 如果存在摩擦,沿接触表面的切向传递切向力。
• 一般目标: 确定接触面积和传递的应力。
• 两次应用单纯的主-从接触算法,并平均化。在第二次施加接触 约束时,交换主/从表面。 • 使接触物体之间的侵彻达到最小化。
北京怡格明思工程技术有限公司
Innovating through simulation
接触方向总是与主控表面垂直。
• 沿主控表面的法向检查接触条件。 • 沿主控表面的法向传递接触力。 • 沿接触表面的切向传递摩擦力。
北京怡格明思工程技术有限公司
Innovating through simulation
主/从方法和隐含假设
北京怡格明思工程技术有限公司
Innovating through simulation
• 因为接触表面下面的 实体被离散化,接触 表面也必须被离散化。 接触表面分为: 主面 从面
北京怡格明思工程技术有限公司
北京怡格明思工程技术gh simulation
定义双面接触概述
北京怡格明思工程技术有限公司
Innovating through simulation
定义接触的三个步骤:
1
定义接触表面。 定义接触对。 定义接触属性。
2
3
北京怡格明思工程技术有限公司
Innovating through simulation
赫兹接触
接触面之间的相对位移很 小。 分布表面的接触。
ABAQUS接触分析
ABAQUS接触分析
在接触分析中,ABAQUS可以模拟两个或多个物体之间的力学接触行为,并计算出接触面上的接触力、接触压力分布等关键参数。
对于弹性材料,ABAQUS使用接触算法来离散表示接触面,通过求解相应的接触力方程来计算接触力。
对于非弹性材料,ABAQUS使用弹塑性粘弹塑性接触法来模拟接触行为。
在使用ABAQUS进行接触分析时,首先需要定义接触面的集合以及相应的接触属性。
接触面可以由点、线、面或体素集表示。
接触属性包括摩擦系数、弹性刚度、硬化指数等。
然后,需要指定接触算法以及公式,用于计算接触力和接触面的位移。
接下来,需要定义物体的材料属性和边界条件。
材料属性包括弹性模量、屈服强度等。
边界条件包括约束条件、加载条件等。
在进行接触分析时,需要确保物体的几何形状和网格划分是准确和合适的。
完成模型的设置后,可以进行求解计算。
ABAQUS通过迭代方法求解非线性方程组,得到接触力和接触面的位移解。
求解完毕后,可以进行结果的后处理,包括接触力分布的可视化、接触面的位移和应变分布等。
总之,ABAQUS接触分析是一种重要的模拟方法,可以帮助工程师和科学家研究不同物体之间的力学接触行为。
通过合理设置模型参数和边界条件,结合强大的求解算法,ABAQUS可以提供精确和可靠的接触力和位移解,为工程设计和科学研究提供有力的支持。
workbench的接触解析(1)

WorkBench接触解析1.接触的基本概念1.1. 接触的定义两独立表面相互接触并相切,则称之为接触.一般物理意义上, 接触的表面包含如下特性:不会渗透.可传递法向压缩力和切向摩擦力.通常不传递法向拉伸力.可自由分离和互相移动.接触是状态改变非线性. 也就是说, 系统刚度取决于接触状态, 即part之间是接触或分离.1.2. workbench接触类型1)Bonded(绑定): 这是Workbench中关于接触的默认设置。
如果接触区域被设置为绑定,不允许面或线间有相对滑动或分离,可以将此区域看作被连接在一起,类似于共结点。
因为接触长度/面积是保持不变的,所以这种接触可以用作线性求解。
如果接触是从数学模型中设定的,程序将填充所有的间隙,忽略所有的初始渗透。
2)No Separation(不分离): 这种接触方式和绑定类似。
它只适用于面。
不允许接触区域的面分离,但是沿着接触面可以有小的无摩擦滑动。
即法向不分离,切向可以有小位移,也只用于线性接触。
3)Frictionless(无摩擦): 这种接触类型代表单边接触,即如果出现分离则法向压力为零。
只适用于面接触。
因此,根据不同的载荷,模型间可以出现间隙。
它是非线性求解,因为在载荷施加过程中接触面积可能会发生改变。
假设摩擦系数为零,因此允许自由滑动。
使用这种接触方式时,需注意模型约束的定义,防止出现欠约束。
法向可分离,但不渗透,切向自由滑动。
程序会给装配体加上弱弹簧,帮助固定模型,以得到合理的解。
4)Rough(粗糙的): 这种接触方式和无摩擦类似。
但表现为完全的摩擦接触,即没有相对滑动,法向可分离,不渗透,切向不滑动。
只适用于面接触。
默认情况下,不自动消除间隙。
这种情况相当于接触体间的摩擦系数为无穷大。
5)Frictional(有摩擦): 这种情况下,在发生相对滑动前,两接触面可以通过接触区域传递一定数量的剪应力。
有点像胶水。
法向可分离,但不渗透,切向滑动,有摩擦力。
第7章30接触分析 谐响应分析

• 7.4.4 接触设置 • 7.4.5 网格划分 • 7.4.6 载荷及约束设置 • 7.4.7 模型求解 • 7.4.8 结果后处理
7.5 本章小结
• 本章先对接触问题的基本概念和模型进行介绍,让读者对 有限元接触有一个概念性的了解。然后通过两个实例分析, 详细介绍如何在WB 19.0中进行含非线性接触问题的仿真 设置和操作,并对WB 19.0中提供的各类接触模型及接触 类型进行逐一讲解,使读者掌握如何选择接触类型、设置 接触参数、查看接触产生的各种结果类型,最终完成整个 接触项目的仿真。
A
B
7.2 接触类型介绍
• WB 19.0中提供了6种接触类型,分别是绑定(Bonded)、 无分离(No Separation)、无摩擦(Frictionless)、静 摩擦(Rough)、摩擦接触(Frictional)、滑动摩擦 (Forced Frictional Sliding)。
Байду номын сангаас
1.绑定
• 本例将以法兰盘连接为分析对象,从模型简化讲解,到基 本的接触设置和操作方法介绍,为读者提供全面的绑定类 型接触的使用场景介绍。
7.3.1 问题描述
• 法兰盘连接是比较常见的连接类型,一般用于传递扭矩, 如图7-4所示,通过法兰盘连接后面的旋转主轴,带动轴 系结构进行旋转是轴类法兰盘连接常见的一种形式。
5.摩擦接触
• 通用摩擦接触,既包含静摩擦也包含滑动摩擦,在接触初始时,两接 触体是静摩擦状态,当外界作用力增大且使两接触体发生相对滑动时, 此时产生滑动摩擦,滑动摩擦力基于F=计算,用户在定义该接触类 型时需要定义接触面之间的摩擦系数。
hyperworks接触分析实例教程1
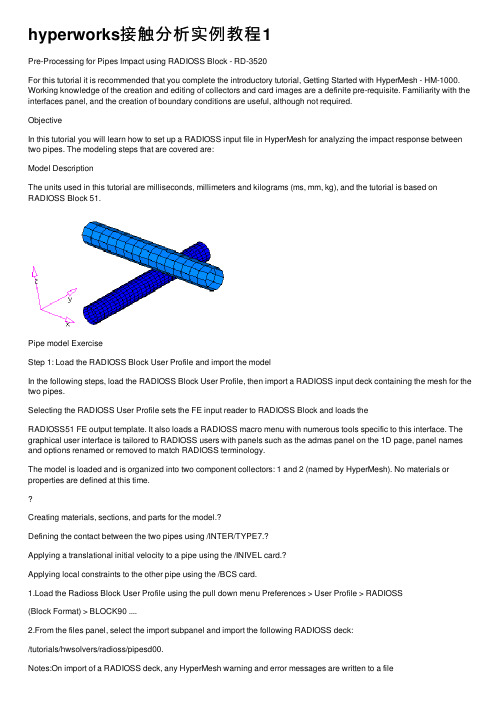
hyperworks接触分析实例教程1Pre-Processing for Pipes Impact using RADIOSS Block - RD-3520For this tutorial it is recommended that you complete the introductory tutorial, Getting Started with HyperMesh - HM-1000. Working knowledge of the creation and editing of collectors and card images are a definite pre-requisite. Familiarity with the interfaces panel, and the creation of boundary conditions are useful, although not required.ObjectiveIn this tutorial you will learn how to set up a RADIOSS input file in HyperMesh for analyzing the impact response between two pipes. The modeling steps that are covered are:Model DescriptionThe units used in this tutorial are milliseconds, millimeters and kilograms (ms, mm, kg), and the tutorial is based on RADIOSS Block 51.Pipe model ExerciseStep 1: Load the RADIOSS Block User Profile and import the modelIn the following steps, load the RADIOSS Block User Profile, then import a RADIOSS input deck containing the mesh for the two pipes.Selecting the RADIOSS User Profile sets the FE input reader to RADIOSS Block and loads theRADIOSS51 FE output template. It also loads a RADIOSS macro menu with numerous tools specific to this interface. The graphical user interface is tailored to RADIOSS users with panels such as the admas panel on the 1D page, panel names and options renamed or removed to match RADIOSS terminology.The model is loaded and is organized into two component collectors: 1 and 2 (named by HyperMesh). No materials or properties are defined at this time.Creating materials, sections, and parts for the model.?Defining the contact between the two pipes using /INTER/TYPE7.?Applying a translational initial velocity to a pipe using the /INIVEL card.?Applying local constraints to the other pipe using the /BCS card.1.Load the Radioss Block User Profile using the pull down menu Preferences > User Profile > RADIOSS(Block Format) > BLOCK90 ....2.From the files panel, select the import subpanel and import the following RADIOSS deck:/tutorials/hwsolvers/radioss/pipesd00.Notes:On import of a RADIOSS deck, any HyperMesh warning and error messages are written to a fileOn import, any RADIOSS cards not supported by HyperMesh are written to the control cardunsupp_cards . This card is accessed from the control cards panel on the BCs page and is apop-up text editor. The unsupported cards are exported with the rest of the model.Care should be taken if an unsupported card points to an entity in HyperMesh. An example of this is an unsupported material referenced by a /PART card. HyperMesh stores unsupported cards as text and does not consider pointers.On import, HyperMesh renumbers entities having the same ID as other entities. In HyperMesh, for example, all elements must have a unique ID. The message file radiossblk.msg provides a list of renumbered elements and their original and new IDs.Step 2: Understand the relationships between the /PART, /SHELL, /MAT and /PROP cards in HyperMeshA /PART shares attributes such as section properties (/PROP) and a material model (/MAT). A group of shells (/SHELL) sharing common attributes generally share a common part ID (PID).The figure below shows how these keywords are mapped to HyperMesh entities:Map to HyperMesh entities Component, property and material collectors are created and edited from the collectors panel.For the RADIOSS keyword interface, there is only one component card image and it is named Part . There are several property card images, such as P1_shell P2_truss , P14_solid . There are many material card images, such as M1_ELAST , M48_HONEYCOMB .The complete list of card images is available from the collectors panel, as you assign card images to the various types of collectors.A HyperMesh card image allows you to view the image of keywords and data lines for defined RADIOSS entities as interpreted by the loaded template. The keywords and data lines appear in the exported RADIOSS input file as you see them in the card images. Additionally, for some card images, you can define and edit various parameters and data items for the corresponding RADIOSS Block.Use the card (card editor) panel from the permanent menu to review and edit card images. Also, for many entities, their card image can be viewed and edited from the panels in which they are created.Step 3: Create a /MAT card In HyperMesh, a /MAT card is associated to a material collector. To relate it to a /PART card, the material collector needs to be assigned to a component collector.You can assign the material to the component collector as you create the component using the createsubpanel of the collectors panel. In situations where the material was not assigned to the component at the time of creation (and in this case, a dummy material is created with the same name as the componentnamed radiossblk.msg . This file is created in the folder from which HyperMesh is started. The content of the file is also displayed in a pop-up window./SHELL elem_ID part_ID> Organized into component collectors/PART part_ID prop_ID mat_ID > Component collector with a componentcard image/PROP prop_ID > Property collector with a property cardimage/MAT mat_ID>Material collector with a material cardimagecollector), update the component collector's definition by assigning the material in the update subpanel of the collectors panel.In this step, create a material collector with the M1_ELAST card image using the collectors panel. This material will be assigned to both pipes.1.Create/edit a material collector with the name elast1, and a M1_ELAST card image using the createsubpanel of the collectors panel.2.In the card previewer, click [Rho_I] to activate its field.For density, specify 7.8 E-6For Young's modulus [E], specify 208For Poisson's ratio [nu], specify 0.30Note:If you have difficulties completing any task with the creation, update or editing of collectors in this tutorial, refer to the on-line help for the collectors panel by clicking help from the permanent menu. Hint:Any collector that you mistakenly create instead of create/edit can be edited using the card image subpanel of the collectors panel.In this step, we created the material we will use for the analysis. We can now define the /PROP card that will be used to define the properties of the elements in the model.Step 4: Create a /PROP cardIn HyperMesh, the /PROP card is assigned to a property collector. To generate this card, create a property collector using either Property collector icon in the toolbar or from the pull down menu Properties > Create. The model consists of two pipes modeled with shell elements. Create a property collector witha /PROP/SHELL card that will be used for all the elements.1.Create a property collector with the name prop shell, set Type = to surface, set card image= toP1_SHELL, and Thickness = 2.5 card.2.In the card previewer for the /PROP/SHELL card, check 2.5for the shell thickness [Thick].Step 5: Assign the /PART, /MAT and /PROP cards to the elementsAssign the /PART card to the component for the coarse pipe and specify the /PROP/SHELL card ID in it.1.Load the Component Collector Update panel from either the toolbar Component collector or from thepull down menu, select Component > Create.2.Click update subpanel.3.Select the pipe 1 component.4.For card image, select PART.5.Assign the material elast1 and property prop shell.6.Click update.Repeat this procedure for pipe 2.Step 6: Create contact cardsRADIOSS contacts are created in the interfaces panel from the Analysis page or from the pull down menu, selectBCs>Create>Interfaces.A RADIOSS contact is a HyperMesh group. When you want to manipulate an /INTER card, such as delete it, renumber it, or turn it off, you need to work with HyperMesh group entities.In this step, create a contact between the two pipes using /INTER/TYPE7. The pipe with the coarser mesh (2) will be the master surface while the one with finer mesh (1) will be the slave surface. RADIOSS has multiple ways to define master andslave entity types from which to choose; in this example define the master and slave entities as components, doing this the master will be exported as /SURF/PART and the slave asa /GRNOD/PART.First create a group interface with the TYPE7card image using the create subpanel of the interfaces panel.Next, add the master and slave to the group using the add subpanel. Lastly, edit the group’s card image using the card image subpanel, and specify a friction coefficient.Automatically TYPE7 is selected for card image.In this step, we defined the contact between the two pipes as /INTER/TYPE7.Creating boundary conditions for a deck in RADIOSS Block can be efficiently carried out with the BC’s Manager available on the Utility Browser , which can be switched on the screen from the View pull down menu.Every load needs to be stored in a load collector with the corresponding card image. For example, store the velocity loads ina velocity load collector and boundary conditions in the respective collector.1.Create a group with the name contact and the TYPE7 card image using the create subpanel of the interfaces panel.2.From the BCs page, select the interfaces panel or from the pull down menu, select BCs > Create > Interfaces .3.Select the create subpanel.4.In the name= field, enter contact .5.For type=, select TYPE7.6.Optionally select a color.7.Click create .8.From the interfaces panel, select the add subpanel.9.Under master , set the entity type to comps :10.Click the yellow comps selector and select the coarser pipe component 2.11.Click update in the master: field, to the right of the yellow comps selector.12.For slave:, select comps .13.Click the yellow comps selector in the slave:line and select the finer mesh pipe component 1.14.In the slave: field, click update .15.Click review to graphically view the entities in the interface, the master entities of the interface are drawn in blue and the slave entities in red.16.Edit the definition of the group, using the card image subpanel to set the static coefficient to 0.10.17.From the interfaces panel, select the card image subpanel.18.Click edit to review the card image.19.Specify 0.10 for the static coefficient [FRIC].Step 7: Create an initial velocity (/INIVEL/TRA)In this step, we will apply a translational initial velocity to the coarse pipe using /INIVEL/TRA applied to a predefined set of nodes /GRNOD/PART.1.Click on BC’s Manager on the Utility browser.2.From the Boundary Conditions Manager, enter the name tran_vel and select the type as initialvelocity under the Create header.3.For creating a entity set of type GRNOD which is referred to in the INIVEL card, click on Parts button andselect the coarser pipe from the GUI (component ID 2). Click proceed.4.In the BC’s Manager, enter the initial velocity components as 0,0 and -30 for Vx, Vy and Vz fields.5.There is an option for creating/referring the initial velocity card to a local coordinate system. However ifnothing is specified, the global coordinate system is selected by default.6.There is an option to specify the size of the load display on the screen under Label Scale.7.Click the create button. Double check in the model browser for your reference that a load collector andan entity set is created.This completes the creation of an initial velocity for the pipe in the negative global Z direction.Step 8: Create a /BCS and constrain the finer mesh pipeIn this step, we will fully constrain the end nodes of the bottom pipe by using the Boundary Conditions Manager.1.In the BCs Manager under the Create subheading, enter the Name SPC and set Select type asBoundary Condition.2.Now specify the node set of type as GRNOD for the BCS card, switch the entity from parts to Nodesand select the end nodes of the bottom pipe, which are to be constrained.3.Under the Boundary condition components subheading (as illustrated below) activate all thetranslational and rotational check boxes. Click the create button. A load collector with a BCS card is Step 9: Create output definitions and control cardsA window pops up.created and applied the nodes as selected in the above steps. A corresponding node set is created.1.In the Utility menu of the solver browser, click the Engine button.2.Select the options, as shown below.Step 10: Export the modelThis concludes this tutorial. You may discard this HyperMesh model or save it for your own reference. In this tutorial we introduced some of the concepts that govern the HyperMesh interface to RADIOSS. We also use numerous panels that allowed us to do basic modeling in terms of RADIOSS such as defining contacts or boundary conditions.EXERCISE EXPECTED RESULTS3.Click Apply and Close to store the selected options for control and output.1.On Standard toolbar at the top of the HyperMesh window, click Export.2.For File:, click the foldericon and navigate to destination directory where you want to run.3.For Name , enter pipeimpact and click Save .4.Click the downward-pointing arrows next to Export options to expand the panel.5.Click Auto export engine file to export the engine file with the model file.6.Click Export to export both model and engine file.Final deformation and energy balance plotSee alsoSee HyperMesh Tutorials for a complete list of tutorials.。
ANSYS接触分析

7、初始穿透
• 有几种技术可以模拟初始穿透接触问题(如过盈装配)。 可以使用初始几何穿透,或指定偏移量,或二者皆有。 • 指定偏移量(CNOF)
• 或在实常数中指定偏移量(CNOF)contact surface offset CNOF: 0.025
7、初始穿透
正的 CNOF 加大初始穿透 负的 CNOF 减小初始穿透或导致间隙 CNOF 可与几何穿透组合 自动 CNOF 调整 允许 ANSYS 基于初始穿透自动给定 CNOF 值。 导致 “刚好接触” 配置 ICONT 缺省为 0
7、初始穿透
• 如果模型包含初始几何穿透,接触力将立即“阶跃”到一个大值。 • -载荷突变经常导致收敛困难,期望有一种机制能够将初始穿透效应 渐变到零。 • Include with ramped effects 和 Include off set only w/ramp 选项通过在第一载荷步,将初始穿透渐变为零克服收敛困难。为求得 好的结果,在第一载荷步不应施加其它载荷 。
§2 接触单元
§2 接触单元
• 3. 点-点接触单元用于模拟单点和另一个确定点 之间的接触。 • 建立模型时必须事先知道确切的接触位置; • 多个点-点接触单元可以模拟两个具有多个单元 表面间的接触; • 每个表面的网格必须是相同的; • 相对滑动必须很小; • 只对小的转动响应有效。 • 例如: 点一点接触可以模拟一些面的接触。如地基 和土壤的接触
• 2、选取接触刚度的指导:
• Step 1. 开始采用较小的刚度值 • Step 2. 对前几个子步进行计算 • Step 3. 检查穿透量和每一个子步中的平衡迭代次数
•
• • •
在粗略的检查中,如以实际比例显示整个模型时就能观 察到穿透,则穿透可能太大了,需要提高刚度重新分析。 如果收敛的迭代次数过多(或未收敛),降低刚度重新 分析。 牢记:接触刚度是同时影响计算精度和收敛性的最重要 的参数。如果收敛有问题,减小刚度值,重新分析 在分析中减小刚度范围,直到结果(接触压力、最大 SEQV 等)不再明显改变。
ANSYS接触分析_学习手记
◆前提:◇有限元模型。
◇已识别接触面及目标面。
(*可应用自由度耦合来替代接触。
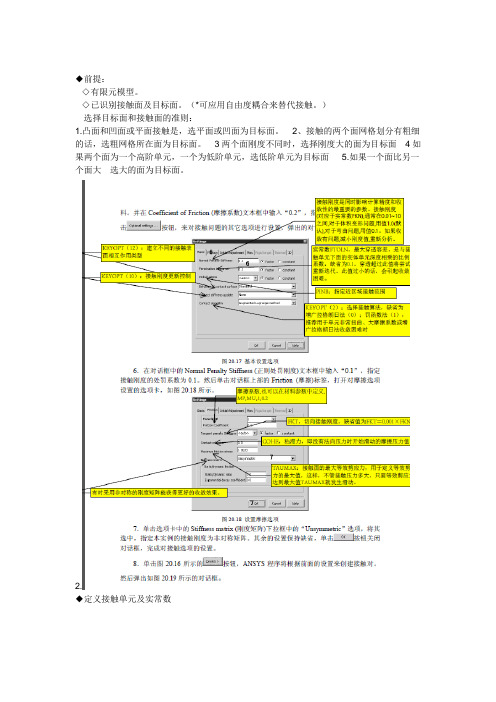
)选择目标面和接触面的准则:1.凸面和凹面或平面接触是,选平面或凹面为目标面。
2、接触的两个面网格划分有粗细的话,选粗网格所在面为目标面。
3两个面刚度不同时,选择刚度大的面为目标面4如果两个面为一个高阶单元,一个为低阶单元,选低阶单元为目标面 5.如果一个面比另一个面大选大的面为目标面。
2.◆定义接触单元及实常数◇(刚性)目标单元—— TARGE169 TARGE170 ;◇(柔性)接触单元—— CONTA171~CONTA172。
***Commands***ET,K,169 !K - 指定的单元编号ET,K+1,172*** ****◇实常数——一个接触对对应同一个实常数号。
TARGE单元的实常数包括:R1、R2 —定义目标单元几何形状CONTA单元的实常数包括:No. Name Description1 R1 Target circle radius(刚性环半径)2 R2 Superelement thickness(单元厚度)*3 FKN Normal penalty stiffness factor(法向接触刚度因子)*4 FTOLN Penetration tolerance factor(最大允许的穿透)*5 ICONT Initial contact closure(初始闭合因子)6 PINB Pinball region(“Pinball”区域)*7 PMAX Upper limit of initial allowable penetration(初始穿透的最大值)*8 PMIN Lower limit of initial allowable penetration(初始穿透的最小值)*9 TAUMAX Maximum friction stress(最大的接触摩擦)*10 CNOF Contact surface offset(施加于接触面的正或负的偏移值)11 FKOP Contact opening stiffness or contact damping*12 FKT Tangent penalty stiffness factor(切向接触刚度)13 COHE Contact cohesion(滑动抗力粘聚力)14 TCC Thermal contact conductance(热接触传导系数)15 FHTG Frictional heating factor(摩擦耗散能量的热转换率)16 SBCT Stefan-Boltzmann constant17 RDVF Radiation view factor18 FWGT Heat distribution weighing factor19 ECC Electric contact conductance20 FHEG Joule dissipation weight factor21 FACT Static/dynamic ratio(静摩擦系数和动摩擦系数的比率)22 DC Exponential decay coefficient(摩擦衰减系数)23 SLTO Allowable elastic slip24 TNOP Maximum allowable tensile contact pressure25 TOLS Target edge extension factor附注:+值作为比例因子,-值作为绝对值;带*号的实常数比较重要,关乎接触分析的收敛;一般实常数可为缺省值。
接触分析
面─面的接触分析之一在涉及到两个边界的接触问题中,很自然把一个边界作为“目标”面而把另一个作为“接触”面,对刚体─柔体的接触,“目标”面总是刚性的,“接触”面总是柔性面,这两个面合起来叫作“接触对”使用Targe169和Conta171或Conta172来定义2-D接触对,使用Targe170和Conta173或Conta174来定义3-D接触对,程序通过相同的实常收号来识别“接触对”。
接触分析的步骤:执行一个典型的面─面接触分析的基本步骤列示如下:1.建立模型,并划分网格2.识别接触对3.定义刚性目标面4.定义柔性接触面5.设置单元关键字和实常的6.定义/控制刚性目标面的运动7.给定必须的边界条件8.定义求解选项和载荷步9.求解接触问题10.查看结果步骤1:建立模型,并划分网格在这一步中,你需要建立代表接触体几何形状的实体模型。
与其它分析过程一样,设置单元类型,实常的,材料特性。
用恰当的单元类型给接触体划分网格。
命令:AMESHVMESHGUI:Main Menu>Preprocessor>mesh>Mapped>3 or4 SidedMain Menu>Pneprocessor>mesh>mapped>4 or 6 sided步骤二:识别接触对你必须认识到,模型在变形期间哪些地方可能发生接触,一是你已经识别出潜在的接触面,你应该通过目标单元和接触单元来定义它们,目标和接触单元跟踪变形阶段的运动,构成一个接触对的目标单元和接触单元通过共享的实常号联系起来。
接触环(区域)可以任意定义,然而为了更有效的进行计算(主要指CPU时间)你可能想定义更小的局部化的接触环,但能保证它足以描述所需要的接触行为,不同的接触对必须通过不同的实常数号来定义(即使实常数号没有变化)。
由于几何模型和潜在变形的多样形,有时候一个接触面的同一区域可能和多个目标面产生接触关系。
面面接触分析
面面接触分析在涉及到两个边界的接触问题中,很自然把一个边界作为“目标”面而把另一个作为“接触”面,对刚体─柔体的接触,“目标”面总是刚性的,“接触”面总是柔性面,这两个面合起来叫作“接触对”使用Targe169和Conta171或Conta172来定义2-D接触对,使用Targe170和Conta173或Conta174来定义3-D 接触对,程序通过相同的实常收号来识别“接触对”。
接触分析的步骤:执行一个典型的面─面接触分析的基本步骤列示如下:1.建立模型,并划分网格2.识别接触对3.定义刚性目标面4.定义柔性接触面5.设置单元关键字和实常的6.定义/控制刚性目标面的运动7.给定必须的边界条件8.定义求解选项和载荷步9.求解接触问题10.查看结果步骤1:建立模型,并划分网格在这一步中,你需要建立代表接触体几何形状的实体模型。
与其它分析过程一样,设置单元类型,实常的,材料特性。
用恰当的单元类型给接触体划分网格。
命令:AMESHVMESHGUI:Main Menu>Preprocessor>mesh>Mapped>3 or4 SidedMain Menu>Pneprocessor>mesh>mapped>4 or 6 sided步骤二:识别接触对你必须认识到,模型在变形期间哪些地方可能发生接触,一是你已经识别出潜在的接触面,你应该通过目标单元和接触单元来定义它们,目标和接触单元跟踪变形阶段的运动,构成一个接触对的目标单元和接触单元通过共享的实常号联系起来。
接触环(区域)可以任意定义,然而为了更有效的进行计算(主要指CPU时间)你可能想定义更小的局部化的接触环,但能保证它足以描述所需要的接触行为,不同的接触对必须通过不同的实常数号来定义(即使实常数号没有变化)。
由于几何模型和潜在变形的多样形,有时候一个接触面的同一区域可能和多个目标面产生接触关系。
在这种情况下,应该定义多个接触对(使用多组覆盖层接触单元)。
abaqus接触分析

abaqus接触分析abaqus—接触分析(转)已有 264 次阅读2010-8-24 19:39 |1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding,adjust=0.2.4、定义tie时也应该设定类似的position tolerance: *Tie,name=ShaftBottom, adjust=yes, position tolerance=0.15、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
abaqus接触分析
abaqus—接触分析(转)已有 264 次阅读2010-8-24 19:39|1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding, adjust=0.2.4、定义tie时也应该设定类似的position tolerance:*Tie, name=ShaftBottom, adjust=yes, position tolerance=0.15、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
Ansys接触分析和设置
Ansys非线性接触分析和设置设置实常数和单元关键选项程序利用20个实常数和数个单元关键选项,来操纵面─面接触单元的接触。
参见《ANSYS Elements Reference》中对接触单元的描述。
实常数在20个实常数中,两个(R1和R2)用来概念目标面单元的几何形状。
剩下的用来操纵接触面单元。
R1和R2 概念目标单元几何形状。
FKN 概念法向接触刚度因子。
FTOLN 是基于单元厚度的一个系数,用于计算许诺的穿透。
ICONT 概念初始闭合因子。
PINB 概念“Pinball"区域。
PMIN和PMAX 概念初始穿透的允许范围。
TAUMAR 指定最大的接触摩擦。
CNOF 指定施加于接触面的正或负的偏移值。
FKOP 指定在接触分开时施加的刚度系数。
FKT 指定切向接触刚度。
COHE 制定滑动抗力粘聚力。
TCC 指定热接触传导系数。
FHTG 指定摩擦耗散能量的热转换率。
SBCT 指定 Stefan-Boltzman 常数。
RDVF 指定辐射观看系数。
FWGT 指定在接触面和目标面之间热散布的权重系数。
FACT 静摩擦系数和动摩擦系数的比率。
DC 静、动摩擦衰减系数。
命令: RGUI:main menu> preprocessor>real constant对实常数 FKN, FTOLN, ICONT, PINB, PMAX, PMIN, FKOP 和 FKT,用户既能够概念一个正值,也能够概念一个负值。
程序将正值作为比例因子,将负值作为绝对值。
程序将下伏单元的厚度作为ICON,FTOLN,PINB,PMAX 和 PMIN 的参考值。
例如 ICON = 说明初始闭合因子是“*基层单元的厚度”。
但是,ICON = 那么表示真实调整带是单位。
若是下伏单元是超单元,那么将接触单元的最小长度作为厚度。
参见图5-8。
图5-8 基层单元的厚度在模型中,若是单元尺寸转变专门大,而且在实常数如 ICONT, FTOLN, PINB, PMAX, PMIN 中应用比例系数,那么可能会显现问题。
ANSYS接触分析精华

ANSYS接触分析精华ANSYS是一款广泛应用于工程领域的有限元分析软件,可以帮助工程师进行各种结构和材料的力学性能分析。
在ANSYS中,接触分析是一个重要的模块,它可以模拟在不同物体之间的接触行为。
本文将介绍ANSYS接触分析的精华内容及其应用。
1. 接触分析的基本原理接触分析是通过建立不同物体之间的节点接触来模拟物体间的接触行为。
在ANSYS中,通过采用节点到节点的接触关系,来模拟物体之间的接触和相互影响。
接触分析的基本原理是基于虚功原理和平衡方程,利用迭代计算方法求解出物体之间的接触压力、接触应力分布、接触区域等参数。
2. 接触问题的分类在ANSYS中,接触问题可分为无接触和有接触两类。
无接触问题是指物体之间不存在接触行为,而有接触问题则包括有限元模型中物体间的相互接触。
有接触问题又可细分为针对不同接触类型的分析,如点对面接触、面对面接触或多物体接触等。
ANSYS提供了不同类型接触分析的功能模块,可以根据实际情况选择合适的接触类型进行模拟。
3. 接触分析的关键步骤3.1 几何建模:在进行接触分析前,需要首先进行几何建模。
ANSYS提供了丰富的几何建模工具,可以创建各种复杂形状的模型。
3.2 网格划分:在进行接触分析前,需要将模型进行网格划分。
合适的网格划分能够保证分析结果的准确性和计算效率。
3.3 材料属性定义:在ANSYS中,需要对物体的材料属性进行定义,包括材料的弹性模量、泊松比、压力限制等。
3.4 边界条件设定:在接触分析中,需要对物体的边界条件进行设定,包括约束条件和加载条件等。
3.5 接触参数设定:在进行接触分析前,需要对接触参数进行设定,如摩擦系数、接触模型类型等。
3.6 求解与后处理:设置好模型后,可以进行求解和后处理。
ANSYS提供强大的求解器用于求解接触问题,并可根据需要进行后处理和结果分析。
4. ANSYS接触分析的应用领域ANSYS接触分析广泛应用于机械、土木、航空航天、汽车等工程领域。
1 传统理论分析齿轮间接触问题

1 传统理论分析齿轮间接触问题传统齿轮接触应力的计算公式是以2圆柱体接触的接触应力公式为基础,结合齿轮的参数导出的。
1881年赫兹导出了2弹性圆柱体接触表面最大接触应力的计算公式以上公式基于如下假设:(1)2圆柱体为无限长、均质的、各向同性的弹性体;(2)变形后的接触面积与圆柱体表面积相比较是极其微小的;(3)作用力为静载荷,与接触面垂直,且沿圆柱体的长度方向均匀分布。
由渐开线的性质可知,渐开线的曲率是变化的,因此,一对齿廓接触点的曲率半径是变化的,并且轮齿处在单齿和双齿啮合区所受载荷也不同,因而一对轮齿啮合时的接触应力随啮合点的位置变化而变化。
实际计算中是以节点啮合为计算位置的,因为该位置计算方便,且接触应力也与最大点差别不大。
从而得到齿轮的接触应力计算公式2 有限元理论分析对圆柱齿轮进行有限元分析时,首先要对齿轮进行力学模型并进行离散化处理,有限元模型的建立合理与否是影响接触边界迭代求解收敛的关键。
现有的计算方法都是建立在某种假定接触区形状的基础上,按赫兹的接触理论进行求解,这与实际接触隋况有所不同。
齿轮的瞬时接触区形状与压力分布是典型的接触非线性问题,有限元法可以很好地饵决。
将2个弹性接触体分离成2个独立物体,根据弹性有限元理论,写出它们各自的有限元基本方程用对称方程组的Cholesky分解法进行求解,每次迭代求解时根据接触状态剔除最大负接触内力的接触点对,形成新的柔度子矩阵,循环迭代求解,直到所有接触点都满足接触条件式以及所有接触内力大于或等于为止。
用柔度矩阵法求解三维弹性接触问题,只需调用一次有限元法得到各接触体可能接触点对上分别作用单位力时的柔度值,就可以完成接触问题的求解。
3 有限元模型对一些比较复杂的结构计算,较为有效的方法是运用有限元模型进行数值计算,来获得所需要的计算结果。
为了模拟齿轮之间的接触力的传递情况,在2个齿轮之间考虑了接触问题,采用的有限元计算软件是ANSYS。
3.1齿轮有限元建模(1)大齿轮主要参数模数: 2.5 nlln齿数: 30材料: 45钢泊松比:0.259(2)小齿论主要参数模数: 2.5 mm齿数: 30材料:40Cr泊松比:0.277由于ANSYS在齿轮造型比较复杂,所以,利用其比较完善的数据接口,在CAXA电子图板中利用其自带的齿轮库完成齿轮造型,以IGS文件格式导入到ANSYS中。
接触分析模块:概念1主面和从面
接触分析模块:概念1主面和从面
ABAQUS/Standard接触分析中的接触对由主面(master surface)和从面(slave surface)构成。
在模拟过程中,接触方向总是主面的法线方向,从面上的节点不会穿越到主面,但主面上的节点可以穿越从面。
定义主面和从面时要注意以下问题:
1、应选择刚度大的面作为主面。
这里所说的刚度,不仅要考虑材料本身的特性,还要考虑结构的刚度。
解析面(analytical surface)或由刚性单元构成的面必须作为主面,从面则必须是柔体上的面(可以是施加了刚性约束的柔体)。
2、如果两个接触面的刚度相似,则应选择网格较为粗的面作为主面。
3、两个面的节点位置不要求是一一对应的,但如果能够一一对应,可以得到更精确的结果。
4、主面不能是由节点构成的面,并且必须是连续的。
如果是有限滑移(finite sliding),主面在发生接触的部位必须是光滑的,不能有尖角。
5、如果接触面在发生接触的部位有很大的凹角或者尖角,应该将其分别定义为两个面。
6、如果是有限滑移,则在整个分析过程中,都尽量不要让从面节点落到主面之外,尤其是不要落到主面的背后,否则容易出现收敛问题。
7、一对接触面的法线方向应该相反,换言之,如果主面和从而在几何位置上没有发生重叠,则一个面的法线应该指向另一个所在的那
一侧,对于三维实体,法线应该指向实体的外侧。
如果法线方向错误,ABAQUS往往会将其理解为具有很大过盈量的过盈接触,因而无法达到收敛。
非线性_接触分析

接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS 使用的接触单元和使用它们的过程,下面分类详述。
点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
abaqus接触分析的常见问题
CAE(计算机辅助工程)是一门复杂的工程科学,涉及仿真技术、软件、产品设计和力学等众多领域。
世界上几大CAE公司各自以其独到的技术占领着相应的市场。
ABAQUS有限元分析软件拥有世界上最大的非线性力学用户群,是国际上公认的最先进的大型通用非线性有限元分析软件之一。
它广泛应用于机械制造、石油化工、航空航天、汽车交通、土木工程、国防军工、水利水电、生物医学、电子工程、能源、地矿、造船以及日用家电等工业和科学研究领域.ABAQUS在技术、品质和可靠性等方面具有卓越的声誉,可以对工程中各种复杂的线性和非线性问题进行分析计算。
《ABAQUS有限元分析常见问题解答》以问答的形式,详细介绍了使用ABAQUS建模分析过程中的各种常见问题,并以实例的形式教给读者如何分析问题、查找错误原因和尝试解决办法,帮助读者提高解决问题的能力。
《ABAQUS有限元分析常见问题解答》一书由机械工业出版社出版。
16.1。
1点对面离散与面对面离散【常见问题16-1】在ABAQUS/Standard分析中定义接触时,可以选择点对面离散方法(node-to-surf ace—dis—cre-tization)和面对面离散方法(surface-to—surfacediscretization),二者有何差别?『解答』在点对面离散方法中,从面(slavesurface)上的每个节点与该节点在主面(maste rsurface)上的投影点建立接触关系,每个接触条件都包含一个从面节点和它的投影点附近的一组主面节点.使用点对面离散方法时,从面节点不会穿透(penetrate)主面,但是主面节点可以穿透从面。
面对面离散方法会为整个从面(而不是单个节点)建立接触条件,在接触分析过程中同时考虑主面和从面的形状变化.可能在某些节点上出现穿透现象,但是穿透的程度不会很严重。
在如图16—l和图16—2所示的实例中,比较了两种情况。
1)从面网格比主面网格细:点对面离散(图16—1a)和面对面离散(图16-2a)的分析结果都很好,没有发生穿透,从面和主面都发生了正常的变形。
基于Hertz 理论圆柱和平面之间的滑动接触分析
基于Hertz 理论圆柱和平面之间的滑动接触分析的报告,600
字
Hertz理论是涉及到滑动接触分析中最重要的一种,它是圆柱
和平面之间形成的接触模型。
接触模型可以利用来估计弹性模量、摩擦因素以及摩擦力,进而分析此类滑动接触系统的受力情况。
Hertz理论的基本假设为:圆柱和平面之间接触点分布均匀,
接触面被假定为完全均匀的无限细软的体,接触角度为0°。
它假设,受力系统中接触面处的应力为极限应力,比如每一接触点的压应力可以表示为:
σ = \(\frac{4}{3}\)E√(\(\frac{R}{D}\))
其中,D 为接触体之间的间隙,R为接触体的半径。
Hertz理论另外还可以应用于描述不同尺寸的平面和圆柱之间
的滑动接触,不同尺寸的平面和圆柱之间接触点分布也不均匀。
在这种情况下,应力分布取决于接触体的几何尺寸,表面形状和材料特性,等等。
例如,当受力系统中存在尺寸不均匀、表面形状不平整或表面粗糙度较大时,接触压力会显著增大,而摩擦系数会有所减小。
同时,Hertz理论还可以用来计算不同材料之间接触、摩擦力
和弹性变形等物理量。
它可以帮助我们了解不同材料之间的物理性质,以及不同材料之间在滑动接触中传递的信息和能量,从而改善滑动接触系统的性能。
总而言之,Hertz理论是一种有效的分析方法,可以用来分析圆柱和平面之间滑动接触的性能。
它有利于我们深入了解材料之间相互作用的机理,从而建立更精确的分析模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一般的接触分类 (2)ANSYS接触能力 (2)点─点接触单元 (2)点─面接触单元 (2)面─面的接触单元 (3)执行接触分析 (4)面─面的接触分析 (4)接触分析的步骤: (4)步骤1:建立模型,并划分网格 (4)步骤二:识别接触对 (4)步骤三:定义刚性目标面 (5)步骤4:定义柔性体的接触面 (8)步骤5:设置实常数和单元关键字 (10)步骤六:控制刚性目标的运动 (21)步骤7:给变形体单元加必要的边界条件 (21)步骤8:定义求解和载步选项 (22)第十步:检查结果 (23)点─面接触分析 (25)点─面接触分析的步骤 (26)点-点的接触 (35)接触分析实例(GUI方法) (38)非线性静态实例分析(命令流方式) (42)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS使用的接触单元和使用它们的过程,下面分类详述。
点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
点─面接触单元点─面接触单元主要用于给点─面的接触行为建模,例如两根梁的相互接触。
如果通过一组结点来定义接触面,生成多个单元,那么可以通过点─面的接触单元来模拟面─面的接触问题,面即可以是刚性体也可以是柔性体,这类接触问题的一个典型例子是插头到插座里。
使用这类接触单元,不需要预先知道确切的接触位置,接触面之间也不需要保持一致的网格,并且允许有大的变形和大的相对滑动。
Contact48和Contact49都是点─面的接触单元,Contact26用来模拟柔性点─刚性面的接触,对有不连续的刚性面的问题,不推荐采用Contact26因为可能导致接触的丢失,在这种情况下,Contact48通过使用伪单元算法能提供较好的建模能力。
面─面的接触单元ANSYS支持刚体─柔体的面─面的接触单元,刚性面被当作“目标”面,分别用Targe169和Targe170来模拟2─D和3—D的“目标”面,柔性体的表面被当作“接触”面,用Conta171,Conta172,Conta173,Conta174来模拟。
一个目标单元和一个接触单元叫作一个“接触对”程序通过一个共享的实常号来识别“接触对”,为了建立一个“接触对”给目标单元和接触单元指定相同的实常的号。
与点─面接触单元相比,面─面接触单元有好几项优点,·支持低阶和高阶单元·支持有大滑动和摩擦的大变形,协调刚度阵计算,单元提法不对称刚度阵的选项。
·提供工程目的采用的更好的接触结果,例如法向压力和摩擦应力。
·没有刚体表面形状的限制,刚体表面的光滑性不是必须允许有自然的或网格离散引起的表面不连续。
·与点─面接触单元比,需要较多的接触单元,因而造成需要较小的磁盘空间和CPU时间。
·允许多种建模控制,例如:·绑定接触·渐变初始渗透·目标面自动移动到补始接触·平移接触面(老虎梁和单元的厚度)·支持死活单元使用这些单元,能模拟直线(面)和曲线(面),通常用简单的几何形状例如圆、抛物线、球、圆锥、圆柱采模拟曲面,更复杂的刚体形状能使用特殊的前处理技巧来建模。
执行接触分析不同的接触分析类型有不同的过程,下面分别讨论面─面的接触分析在涉及到两个边界的接触问题中,很自然把一个边界作为“目标”面而把另一个作为“接触”面,对刚体─柔体的接触,“目标”面总是刚性的,“接触”面总是柔性面,这两个面合起来叫作“接触对”使用Targe169和Conta171或Conta172来定义2-D接触对,使用Targe170和Conta173或Conta174来定义3-D 接触对,程序通过相同的实常收号来识别“接触对”。
接触分析的步骤:执行一个典型的面─面接触分析的基本步骤列示如下:1.建立模型,并划分网格2.识别接触对3.定义刚性目标面4.定义柔性接触面5.设置单元关键字和实常的6.定义/控制刚性目标面的运动7.给定必须的边界条件8.定义求解选项和载荷步9.求解接触问题10.查看结果步骤1:建立模型,并划分网格在这一步中,你需要建立代表接触体几何形状的实体模型。
与其它分析过程一样,设置单元类型,实常的,材料特性。
用恰当的单元类型给接触体划分网格。
命令:AMESHVMESHGUI:Main Menu>Preprocessor>mesh>Mapped>3 or4 SidedMain Menu>Pneprocessor>mesh>mapped>4 or 6 sided步骤二:识别接触对你必须认识到,模型在变形期间哪些地方可能发生接触,一是你已经识别出潜在的接触面,你应该通过目标单元和接触单元来定义它们,目标和接触单元跟踪变形阶段的运动,构成一个接触对的目标单元和接触单元通过共享的实常号联系起来。
接触环(区域)可以任意定义,然而为了更有效的进行计算(主要指CPU 时间)你可能想定义更小的局部化的接触环,但能保证它足以描述所需要的接触行为,不同的接触对必须通过不同的实常数号来定义(即使实常数号没有变化)。
由于几何模型和潜在变形的多样形,有时候一个接触面的同一区域可能和多个目标面产生接触关系。
在这种情况下,应该定义多个接触对(使用多组覆盖层接触单元)。
每个接触对有不同的实常数号。
步骤三:定义刚性目标面刚性目标面可能是2—D的或3─D的。
在2—D情况下,刚性目标面的形状可以通过一系列直线、圆弧和抛物线来描述,所有这些都可以用TAPGE169来表示。
另外,可以使用它们的任意组合来描述复杂的目标面。
在3—D情况下,目标面的形状可以通过三角面,圆柱面,圆锥面和球面来推述,所有这些都可以用TAPGE170来表示,对于一个复杂的,任意形状的目标面,应该使用三角面来给它建模。
控制结点(Pilot)刚性目标面可能会和“pilot结点“联系起来,它实际上是一个只有一个结点的单元,通过这个结点的运动可以控制整个目标面的运动,因此可以把pilot结点作为刚性目标的控制器。
整个目标面的受力和转动情况可以通过pilot结点表示出来,“pilot结点”可能是目标单元中的一个结点,也可能是一个任意位置的结点,只有当需要转动或力矩载荷时,“pilot结点”的位置才是重要的,如果你定义了“pilot结点”ANSYS程序只在“pilot结点”上检查边界条件,而忽略其它结点上的任何约束。
对于圆、圆柱、圆锥、和球的基本图段,ANSYS总是使用条一个结点作为“pilot结点”基本原型你能够使用基本几形状来模拟目标面,例如:“圆、圆柱、圆锥、球。
直线、抛物线、弧线、和三角形不被允许、虽然你不能把这些基本原型彼此合在一起,或者是把它们和其它的目标形状合在一起以便形成一个同一实常数号的复杂目标面。
但你可以给每个基本原型指定它自己的实常的号。
单元类型和实常数在生成目标单元之前,首先必须定义单元类型(TARG169或TARG170)。
命令:ETGUI:main menu>preprocessor>Element Type> Add/Edit/Delete随后必须设置目标单元的实常数。
命令:RealGUI:main menn>preprocessor>real constants对TARGE169和TARGE170仅需设置实常数R1和R2,而只有在使用直接生成法建立目标单元时,才需要从为指定实常数R1、R2,另外除了直接生成法,你也可以使用ANSYS网格划分工具生成目标单元,下面解释这两种方法。
使用直接生成法建立刚性目标单元为了直接生成目标单元,使用下面的命令和菜单路径。
命令:TSHAPGUI:main menu>preprocessor>modeling-create>Elements>Elem Attributes 随后指定单元形状,可能的形状有:·straight line (2D)·parabola (2-D)·clockwise arc(2-D)·counterclockwise arc (2-D)·circle(2-D)·Triangle (3-D)·Cylinder (3-D)·Cone (3-D)·Sphere (3-D)·Pilot node (2-D和3-D)一旦你指定目标单元形状,所有以后生成的单元都将保持这个形状,除非你指定另外一种形状。
然后你就可以使用标准的ANSYS直接生成技术生成结点和单元。
命令:NEGUI:main menu>pnoprocessor> modeling- create> nodesmain menu>pnoprocessor> modeling- create>Elements 在建立单元之后,你可以通过列示单元来验证单元形状命令:ELISTGUI:utility menu>list>Elements>Nodes+Attributes使用ANSYS网格划分工具生成刚性目标单元你也可以使用标准的ANSYS网格划分功能让程序自动地生成目标单元,ANSYS程序将会以实体模型为基础生成合适的目标单元形状而忽略TSHAP命令的选项。