以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述
步进电机驱动芯片选型指南
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
单片机在步进电机细分驱动系统的应用
单片机在步进电机细分驱动系统的应用随着工业自动化的不断发展和技术的不断创新,步进电机成为了目前最为广泛应用的一种控制马达。
而在步进电机的驱动系统中,单片机作为一种高效、灵活的控制芯片,可以通过对步进电机细分驱动实现更加精准、高效、低噪声的控制。
一、步进电机细分驱动系统概述步进电机细分驱动系统是将每一步的动作拆分成多个小步进行控制,从而提高步进电机旋转的精度和平稳度。
常用的细分控制方法有全步进、半步进、四分步、八分步和十六分步等,在步进电机驱动系统控制中,通过不同的细分方式来实现步进电机的精细控制,还可以增加步进电机的转矩,并减小噪声和振动等。
二、单片机在步进电机细分驱动系统中的应用单片机具有高效、灵活、可编程性强和易于集成等特点,可以更好的实现对步进电机的细分控制。
单片机应用于步进电机细分驱动系统时,通过对系统进行编程实现对步进电机的细分控制,可以精确地控制步进电机的旋转角度和速度,控制步进电机运动过程中的步数和旋转方向等,从而达到精细控制的目的。
单片机在步进电机细分驱动系统中可以实现以下功能:1.多种细分方式控制。
通过单片机的编程实现不同的细分方式控制,可以实现全步进、半步进、四分步、八分步和十六分步等多种细分方式,灵活控制步进电机的工作状态。
2.旋转角度和速度控制。
通过单片机的编程实现对步进电机的旋转角度和速度进行控制,可以精确地控制步进电机的运动状态,从而达到要求。
3.步数和旋转方向控制。
通过单片机的编程实现对步数和旋转方向控制,可以实现步进电机的正/反向旋转控制和精确定位功能,提高步进电机的工作精度。
三、单片机在步进电机细分驱动系统中的优势1.高灵活性。
单片机可以根据不同的应用场合和要求进行编程,实现多样化、灵活性高的步进电机细分驱动控制。
2.精细控制能力强。
单片机能够实现精细控制,通过不同的细分方式,实现步进电机旋转角度和速度的控制,提高整个步进电机驱动系统的工作精度。
3.易于集成。
单片机处理器可以集成控制、计算和通讯等多种功能,实现与其他控制系统的无缝衔接,并且便于后续升级和维护。
步进电机控制课程设计
步进电机控制 课程设计一、课程目标知识目标:1. 让学生理解步进电机的原理与结构,掌握其工作方式;2. 使学生掌握步进电机控制的基础知识,包括驱动电路的设计与控制算法;3. 引导学生了解步进电机在自动化设备中的应用。
技能目标:1. 培养学生能够运用所学知识进行步进电机的选型与安装;2. 培养学生具备编写步进电机控制程序的能力,实现电机的精确控制;3. 提高学生动手实践能力,能够独立完成步进电机控制系统的搭建与调试。
情感态度价值观目标:1. 培养学生对步进电机控制技术的兴趣,激发学生学习热情;2. 培养学生具备团队协作精神,能够在小组合作中发挥个人优势;3. 引导学生认识到步进电机控制技术在工业自动化中的重要性,树立科技创新意识。
分析课程性质、学生特点和教学要求:本课程为电子技术及应用领域的一门实用课程,针对高年级学生,他们在前期已经掌握了电子技术基础知识,具备一定的实践能力。
本课程旨在进一步提高学生的实际操作能力,培养他们解决实际问题的能力。
课程目标具体、可衡量,便于学生和教师在教学过程中明确预期成果。
通过本课程的学习,学生能够将理论知识与实际应用相结合,具备步进电机控制系统的设计与实施能力,为将来的职业生涯打下坚实基础。
二、教学内容1. 步进电机原理与结构:- 步进电机的工作原理- 步进电机的分类及结构特点- 步进电机的性能参数2. 步进电机控制系统基础:- 驱动电路设计与原理- 控制算法原理及应用- 步进电机与控制器接口技术3. 步进电机控制程序编写:- 控制程序设计流程- 编程语言及开发环境选择- 步进电机控制程序实例4. 步进电机控制系统实践:- 步进电机选型与安装- 控制系统硬件连接与调试- 控制程序下载与运行5. 步进电机应用案例分析:- 步进电机在自动化设备中的应用案例- 案例分析与讨论- 创新设计与实践教学内容安排与进度:第一周:步进电机原理与结构学习第二周:步进电机控制系统基础学习第三周:步进电机控制程序编写学习第四周:步进电机控制系统实践操作第五周:步进电机应用案例分析及创新设计教材章节关联:《电子技术与应用》第四章:电机控制技术《自动化控制系统》第三章:步进电机及其控制系统教学内容确保科学性和系统性,结合课程目标,按照教学大纲安排和进度,使学生能够循序渐进地掌握步进电机控制相关知识。
步进电机的PLC控制系统设计

Design of PLC Control System for Stepper MotorWu Ziming,Zhao Weixue(Heilongjiang University of Business and Technology, Harbin, Heilongjiang 150025, CHN)【Abstract】Firstly, designs the overall scheme of the stepper motor speed regulation electrical control system, and analyzes and selects the functions of the existing stepper drive functional mod⁃ules based on the corresponding modules. It mainly includes PLC control module, sensor module, motor drive module, power supply, and other parts. Secondly, a programming tool for the stepper motor speed control electrical control system was provided to control the sensors and the specific program for controlling the motor, and automatic cyclic positioning was achieved. In the field ex⁃periment, the specific methods of multiple working modes of the system are debugged, the physical objects of step positioning are analyzed, and the man-machine interface is added to realize the vi⁃sualization of the step motor speed control system.Key words:stepper motor;PLC;sensors;man-machine interface1引言在工业4.0的时代,步进驱动自动化的应用越来越广泛,其中,又以基于PLC的自动化控制系统最先进。
步进电机系统的组成及原理
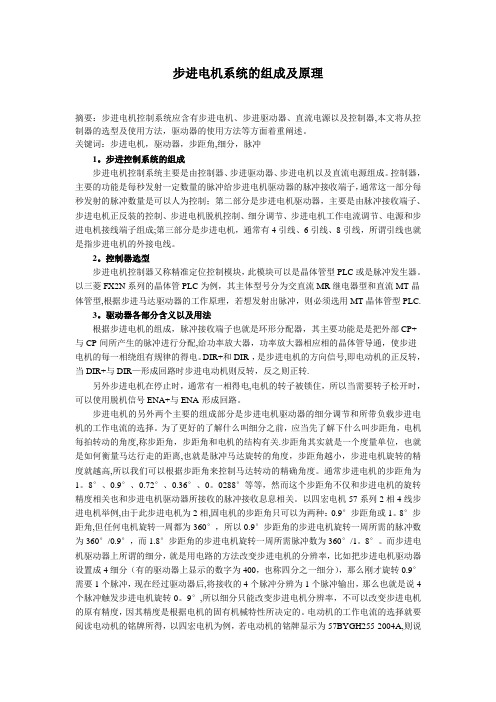
步进电机系统的组成及原理摘要:步进电机控制系统应含有步进电机、步进驱动器、直流电源以及控制器,本文将从控制器的选型及使用方法,驱动器的使用方法等方面着重阐述。
关键词:步进电机,驱动器,步距角,细分,脉冲1。
步进控制系统的组成步进电机控制系统主要是由控制器、步进驱动器、步进电机以及直流电源组成。
控制器,主要的功能是每秒发射一定数量的脉冲给步进电机驱动器的脉冲接收端子,通常这一部分每秒发射的脉冲数量是可以人为控制;第二部分是步进电机驱动器,主要是由脉冲接收端子、步进电机正反装的控制、步进电机脱机控制、细分调节、步进电机工作电流调节、电源和步进电机接线端子组成;第三部分是步进电机,通常有4引线、6引线、8引线,所谓引线也就是指步进电机的外接电线。
2。
控制器选型步进电机控制器又称精准定位控制模块,此模块可以是晶体管型PLC或是脉冲发生器。
以三菱FX2N系列的晶体管PLC为例,其主体型号分为交直流MR继电器型和直流MT晶体管型,根据步进马达驱动器的工作原理,若想发射出脉冲,则必须选用MT晶体管型PLC.3。
驱动器各部分含义以及用法根据步进电机的组成,脉冲接收端子也就是环形分配器,其主要功能是是把外部CP+与CP-间所产生的脉冲进行分配,给功率放大器,功率放大器相应相的晶体管导通,使步进电机的每一相绕组有规律的得电。
DIR+和DIR-,是步进电机的方向信号,即电动机的正反转,当DIR+与DIR—形成回路时步进电动机则反转,反之则正转.另外步进电机在停止时,通常有一相得电,电机的转子被锁住,所以当需要转子松开时,可以使用脱机信号ENA+与ENA-形成回路。
步进电机的另外两个主要的组成部分是步进电机驱动器的细分调节和所带负载步进电机的工作电流的选择。
为了更好的了解什么叫细分之前,应当先了解下什么叫步距角,电机每拍转动的角度,称步距角,步距角和电机的结构有关.步距角其实就是一个度量单位,也就是如何衡量马达行走的距离,也就是脉冲马达旋转的角度,步距角越小,步进电机旋转的精度就越高,所以我们可以根据步距角来控制马达转动的精确角度。
自动化题库(有答案)
自动化题库(有答案)1、DL/T860标准中关于SCD描述正确的是 AA、是全站系统配置文件,全站唯一;B、是IED实例配置文件;C、是系统规范描述文件;D、是IED能力描述文件2、DL/T860标准中关于ICD描述正确的是 DA、是全站系统配置文件,全站唯一;B、是IED实例配置文件;C、是系统规范描述文件;D、是IED能力描述文件3、DL/T860标准中关于CID描述正确的是 BA、是全站系统配置文件,全站唯一;B、是IED实例配置文件;C、是系统规范描述文件;D、是IED能力描述文件4、DL/T860标准中关于SSD描述正确的是 CA、是全站系统配置文件,全站唯一;B、是IED实例配置文件;C、是系统规范描述文件;D、是IED能力描述文件5、DL/T860标准中不同的功能约束代表不同的类型,ST代表的是 AA、状态信息;B、测量值;C、控制;D、定值组6、DL/T860标准中不同的功能约束代表不同的类型,MX代表的是 BA、状态信息;B、测量值;C、控制;D、定值组7、DL/T860标准中不同的功能约束代表不同的类型,SG代表的是 DA、状态信息;B、测量值;C、控制;D、定值组8、DL/T860标准中不同的功能约束代表不同的类型,CO代表的是 CA、状态信息;B、测量值;C、控制;D、定值组9、DL/T860-7 关于TrgOp触发条件中dchg描述正确的是 AA、数据变化;B、数据更新;C、品质变化;D、以上都不正确10、DL/T860-7 关于TrgOp触发条件中qchg描述正确的是 CA、数据变化;B、数据更新;C、品质变化;D、以上都不正确11、DL/T860-7 关于TrgOp 触发条件中dupd描述正确的是 BA、数据变化;B、数据更新;C、品质变化;D、以上都不正确12、应用DL/T860标准的变电站,设备之间采用TCP/IP通讯,其中站控层设备、间隔层设备分别是(B )A、服务器端、客户端;B、客户端、服务器端;C都是服务器端;D、都是客户端13、SV报文中,电压采样值值为32为整形,1LSB=();电流采样值值为32为整形,1LSB=(A)A、10mV 1mA;B、1mV 1mA ;C、10mV 10mA;D、1mV 10mA14、SCL模型中,LDNAME的字符数不大于( D )A、4;B、8;C、16;D、3215、SCL模型中,dataNAME的字符数不大于(D )A、1;B、5;C、7;D、1016、DL/T860中,取代是一种功能约束,其英文标示为( A )A、SV;B、SP;C、DC;D、CF17、SCL模型中数据属性列入标示为“M”代表( B )A、可选;B、强制;C、取代;D、配置18、逻辑节点组指示符中的“M”代表(C )A、控制;B、保护;C、计量和测量;D、监控19、SCL模型中的数据属性“q”代表的是(A )A、品质;B、时间;C、值;D、其他20、常用(B)节点表示GOOSE服务节点。
7.2 步进电机及其驱动控制系统

C N C 主要内容7.2 步进电机及其驱动控制系统主要内容:•步进电机的原理;•主要性能参数;•步进驱动的特点;•驱动控制:环形分配器,功放电路。
要求:在掌握原理基础上,注重围绕应用了解各型电机的特点、性能参数、功放电路。
主要内容定义:步进电机是一种脉冲控制的执行元件,将电脉冲转化为角位移。
每给步进电机输入一个脉冲,其转轴就转过一个角度,称为步距角。
✓脉冲数量----位移量;✓脉冲频率----电机转速;✓脉冲相序----方向。
组成:由步进电机驱动电源和步进电机组成,没有反馈环节,属于开环位置控制系统。
7.2.1 步进电机概述主要内容优点:结构简单,价格便宜,工作可靠;缺点:–容易失步(尤其在高速、大负载时),影响定位精度;–在低速时容易产生振动;–细分技术的应用,明显提高了定位精度,降低了低速振动。
应用:要求一般的开环伺服驱动系统,如经济型数控机床、和电加工机床、计算机的打印机、绘图仪等设备。
步进电动机的分类按运动方式分:旋转式、直线运动式、平面运动式和滚切运动式。
按工作原理分:反应式(磁阻式)、电磁式、永磁式、混合式。
按结构分:单段式(径向式)、多段式(轴向式),印刷绕组式。
按相数分:三相、四相、五相、六相和八相等。
按使用频率分:高频步进电动机和低频步进电动机。
(1) 反应式步进电动机极与极之间的夹角为60°,每个定子磁极上均匀分布了五个齿,齿槽距相等,齿距角为9°。
转子铁心上无绕组,只有均匀分布的40个齿,齿槽距相等,齿距角为360°/40=9°。
单段式的结构:三相反应式步进电动机。
定子铁心上有六个均匀分布的磁极,沿直径相对两个极上的线圈串联,构成一相励磁绕组。
特点:转子无绕组,定转子开小齿、步距小;应用最广。
7.2 步进电机及其驱动控制系统C N C(2) 永磁式步进电动机工作原理:转子或定子一方具有永久磁钢,另一方有软磁材料制成,由绕组轮流通电产生的磁场与永久磁钢相互作用,产生转矩是转子转动。
微型精密车床的设计

摘要微型精密车床的设计,它主要包括以下几个主要部分:床身、主轴箱组件、尾架组件、变速齿轮箱、丝杠等。
床身主要起支撑的作用,所有其他主要部件都安装在床身上,通常在床身上面有内外两组平行的导轨。
主轴箱组件是机床实现旋转运动的执行件,是机床上的一个关键组件。
主轴组件由主轴,主轴支撑和安装在主轴上的传动件,密封件组成。
尾座组件主要由三部分组成。
底座与床身的内侧导轨配合,并可以在导轨上做纵向移动,底座上有一个可以使整个尾座组件夹紧在任意位置上的装置。
变速箱主要通过齿轮的变速最终使刀具按主轴的转数纵向地或横向地精确移动。
采用滚珠丝杠,减小摩擦,提高了运动精度。
本设计主要设计进给部分,包括溜板箱的设计,丝杆的设计,步进电动机的选型和校核计算,刀架的设计。
由于微型精密车床体积小,质量轻,便于运输。
所以微型精密车床得到了广泛的应用关键词微型精密滚珠丝杠溜板箱组件刀架步进电动机AbstractMicro precision lathes design, it mainly includes the following main parts: lathe bed, headstock assembly, tailstock assembly, quick-change gear box ,leadscrew, etc. The bed`s main effect is supporting, all other major components are installed in bed, usually in bed with internal and external two groups of parallel ways. headstock assembly is the realization of rotating machine tools, implementation is a key component. headstock assembly is made up of spindle, spindle support and installed in the transmission shaft and seals. tailstock assembly mainly consists of three parts. Pedestal and the inside of the bed, and can guide ways longitudinal move in on a pedestal, can make whole tailstock assembly clamping device in any position. The quick-change box mainly though changegears eventually made by cutting the number of vertical shaft by turning horizontally o r precise movement. Using the leadscrew, reducing friction, improve the motion precision. This design mainly design the feed part, including the carriage design, leadscrew design, the design of stepping motor selection and design of the check calculation, the tool post design. Because the micro precision lathe, small size, light quality, easy to transport. So the micro precision lathes are widely applied. Keywords micro precision leadscrew carriage assembly tool post stepping motor目录前言 (5)1.绪论 (6)1.1 设计的目的和意义 (6)1.2 微型机械加工技术发展现状趋势分析 (6)1.3 微型精密车床的现状 (7)2.微型精密车床总体方案拟定 (9)2.1 进给部分电动机的选用 (9)2.1.1 步进电动机及其发展 (9)2.1.2步进电动机的特点 (10)2.1.3 步进电动机的类型 (10)2.1.4 步进电机的工作原理 (11)2.1.5 步进电机的常用参数 (12)2.1.6 步进电机具有如下优点 : (13)2.2 丝杆螺母的选用 (14)2.3机床导轨及尾座的设计 (14)2.4 机床床身的设计 (14)3.纵向进给机构设计 (17)3.1 进给系统的概述和总体方案设计 (17)3.2 滚珠丝杠螺母的概述 (17)3.2.1 滚珠丝杠螺母工作原理及其特点 (17)3.2.2 滚珠丝杠螺母的结构循环方式 (18)3.3 丝杆螺母副的选择 (21)3.3.1内循环与外循环的选用说明 (21)3.3.2 滚珠丝杠的轴向间隙调整和预紧方法 (21)3.3.3.滚珠丝杠的安装 (21)3.4 滚珠丝杠螺母副的计算 (22)3.5 滚珠丝杠螺母副的验算 (24)3.5.1 刚度计算 (24)3.5.2 稳定性验算: (25)3.5.3丝杠系统的刚度计算: (26)3.5.4 反向死区的验算: (26)3.6 滚珠丝杠的设计与计算 (27)3.6.1 切削力的计算 (28)3.6.2 滚珠丝杠设计计算 (29)3.7 纵向步进电动机的验算 (30)3.8 消隙齿轮的计算 (34)3.9 消隙轴的设计 (39)3.10 动力计算 (44)3.10.1 小齿轮的转动惯量 (44)3.10.3 计算工作台的转动惯量JW (45)3.10.4 计算丝杠的转动惯量Js (45)4.横向进给机构的设计 (46)4.1 横向滚珠丝杠螺母副的型号选择与校核步骤 (46)4.1.1型号选择 (46)4.1.2 横向滚珠丝杠的校核 (46)4.2 横向进给系统的设计和计算 (47)4.2.1 横向进给系统的设计 (47)4.2.2 横向进给系统的设计和计算 (47)4.2.3 滚珠丝杠设计计算 (48)4.2.4 动载强度计算 (49)4.2.5 静强度计算 (51)4.2.6 临界转速校核 (51)4.2.7 额定寿命的校核 (52)4.3 横向进给步进电机的计算 (52)5. 刀架的设计 (54)5.1 减速传动机构的设计 (54)5.2 自动回转刀架的工作原理 (55)结论 (60)致谢 (61)参考文献 (62)前言大学的学习生活即将结束,大学学习生活中的最后一个环节也是最重要一个环节——毕业设计,它是对所学知识和技能的综合运用和检验。
步进电机控制系统设计

步进电机控制系统设计目录1绪论 (3)1.1 步进电机概述 (3)1.2 步进电机的特征 (3)1.3 步进电机驱动系统概述 (4)1.4 课题研究的主要内容 (4)2步进电机驱动系统的方案论证 (5)2.1 步进电机驱动系统简介 (5)2.2 步进电机驱动器的特点 (5)2.3 混合式步进电机的驱动电路分类和性能比较 (6)2.3.1 双极性驱动器与单极性驱动器 (6)2.3.2 单电压驱动方式 (8)2.3.3 高低压驱动方式 (9)2.3.4 斩波恒流驱动 (10)2.4 方案的确定 (10)3混合式步进电动机驱动控制系统硬件设计 (11)3.1单片机最小系统 (11)3.2 红外遥控电路 (12)3.2.1 红外发射电路 (12)3.2.2 红外接收电路 (13)3.3 LCD显示电路 (14)3.4 双机通讯 (15)3.5 步进电机驱动部分 (16)3.5.1 单极性步进电机驱动 (16)3.5.2 双极性步进电机驱动 (18)3.6 电源电路 (18)4 软件设计 (19)4.1 主机LCD显示菜单程序 (19)4.2 双机通讯程序 (20)4.3 下位机步进电机驱动程序 (22)5 驱动器试验结果 (24)5.1 概述 (24)5.2 试验内容和结论 (24)总结 (26)参考文献 (27)1绪论1.1 步进电机概述步进电机是将电脉冲信号转换为角位移或线性运动的执行器。
它由步进电机及其动力驱动装置组成,形成开环定位运动系统。
当步进驱动器接收到脉冲信号时,它驱动步进电机以设定方向以固定角度(步进角度)旋转。
脉冲输入越多,电机旋转的角度越大;输入脉冲的频率越高,电机的速度越快。
因此,可以通过控制脉冲数来控制角位移,从而达到精确定位的目的;同时,通过控制脉冲频率可以控制电机转速,从而达到调速的目的。
根据自身结构,步进电机可分为三类:反应型(VR),永磁型(PM)和混合型(HB)。
混合式步进电机具有无功和永磁两种优点,应用越来越广泛。
简易步进电机驱动系统的设计与实现
简易步进电机驱动系统的设计与实现摘要:本实验设计了一个简易的步进电机驱动电路,使用了SST89E516RD单片机、ULN2803电机驱动芯片和四相八拍的步进电机。
实验的目标是通过控制电路,使步进电机按照预定的顺序旋转。
首先,我们将SST89E516RD单片机与ULN2803电机驱动芯片进行连接。
单片机的相应引脚连接到ULN2803的输入端,ULN2803的输出端通过电阻连接到步进电机的控制端。
然后,根据步进电机的类型和步进方式,我们确定了四相八拍的驱动顺序。
通过对ULN2803的输入信号进行适时改变,可以实现步进电机的转动。
关键词:步进电机驱动电路,SST89E516RD单片机,四相八拍的步进电机,ULN2803电机驱动芯片,步进电机的转动一、设计任务与要求1、基本要求(1)利用SST89E516RD单片机、ULN2803电机驱动芯片和四相八拍的步进电机,设计一个简易的步进电机驱动电路;(2)使用嘉立创EDA或者Altium Designer软件完成硬件原理图的设计,并借助SST89E516RD单片机实验箱完成硬件电路的搭建;(3)利用Keil等集成开发环境,完成汇编语言软件的编写和调试,并借助串口下载器将程序下载到实验系统上运行,本系统可以利用按键对步进电机进行加速和减速顺时针转动。
2、拓展要求(选做)设计C语言代码完成上述基本要求,并且读取按键值,使步进电机进行逆时针转动。
二、总体方案设计(一)总体方案论证1. 步进电机选型:根据实验要求和预设条件,选择具有合适参数的步进电机作为驱动电机。
需要考虑的参数包括步距角、相数、电机型号等。
选择步进电机时需要根据实际需求确定电机的转速和扭矩要求,以及所需要的精度和分辨率等。
2. 驱动电路设计:步进电机的驱动电路通常由电流控制器和功率放大器组成。
电流控制器负责产生所需的驱动信号,而功率放大器则负责将信号放大以驱动步进电机。
常见的驱动方式包括双极性驱动和四相驱动。
步进电动机伺服系统概述

图6-7 矩角特性
6.2 步 进 电 动 机伺 服系统
图6-8 步进电动机静态矩角特性曲线 图6-9 启动转矩
如图6-8所示,三相步进电动机各相的矩 角特性曲线的相位差为1/3周期,其中曲线 A和曲线B的交点所对应的力矩Tq是电动机 运行状态的最大启动转矩。也就是说,只 有负载转矩TL小于Tq,电动机才能正常启 动运行;否则,容易造成丢步,电动机也 不能正常启动。
(输入信号)
CNl-7 CN1-8
RDY COM
控制回路正常 (输出信号)
输出信号公共点
CNl-9 ZERO
电气循环原点 (输出信号)
单脉冲方式时,正反转方向(DIR DIR )信号
双脉冲方式时,反转脉冲(CCW、CCW )信号
当控制电源、回路正常时,输出低电平信号
RDY、ZERO输出信号的公共点 半步运行时每二十拍送出一电气循环原点 整步运行时每十拍送出一电气循环原点
6.2 步 进 电 动 机伺 服系统
图6-5 步进电动机原示意图
图6-6 三相反应式步进电机工作原理示意图
对每一相绕组通电的操作称为一拍,则A、B、C三相绕组轮流通电需要三
拍,从上面分析可知,电动机转子转动一个齿距需要三拍操作。实际上,电
动机每一拍都转一个角度,也称前进了一步,这个转过的角度称为步距角,
最高工作频率,记为fmax。它是决定定子绕组通电状态最高变化频率的 参数,即决定了步进电动机的最高转速。
6.2 步 进 电 动 机伺 服系统
5.矩频特性 矩频特性T=F(f)所描述的是
步进电动机连续稳定运行时输出 转矩与连续运行频率之间的关系 。如图6-10所示,该特性曲线上 每一频率f所对应的转矩为动态 转矩T。可见,动态转矩的基本 趋势是随连续运行频率的增大而 降低。
机电驱动系统

步进电机驱动系统采用步进电机作为动力源 ,通过控制器对电机的步进角度进行控制。 这种驱动系统主要用于实现精确的定位和角 度调整,被广泛应用于数控机床、机器人等 领域
机电驱动系统的应用
机电驱动系统被广泛应用于各 种机械设备中,如数控机床、 机器人、自动化生产线等
同时,随着科技的不断发展和 进步,机电驱动系统的应用领 域也在不断扩大,如新能源汽 车、风力发电等领域
机电驱动系统
XXX:XXX XXX:XXX
2
01 03
-
02 04
概述
机电驱动系统是机械设备 中重要的组成部分,主要 包括电机、传动机构、控 制器等部分
传动机构则将电机的输出 扭矩传递到机械设备上, 以实现设备的运动和操作
12
+
34
电机作为驱动系统的核心 部件,通过电磁感应原理 将电能转化为机械能,从
机电驱动系统的未来发展趋势
模块化和标准化
随着机械设备复杂性的不断增加,模块化和标准化将成为机电驱动系统的未来发展趋势。 通过模块化和标准化技术,可以实现机电驱动系统的快速组装和更换,提高设备的维修性 和互换性。这将有助于降低设备的成本和提高设备的竞争力
-
感谢观看
20X球能源危机的加剧,高效化和节能化将成为机电驱动系统未来发展的重要趋势。新 型的电机控制技术和材料将不断涌现,为提高机电驱动系统的效率和降低能耗提供更多的 选择和可能性
机电驱动系统的未来发展趋势
智能化和网络化
随着人工智能和物联网技术的不断发展,智能化和网络 化将成为机电驱动系统的未来发展趋势。通过智能化和 网络化技术,可以实现远程监控和管理机电驱动系统, 提高设备的运行效率和安全性。同时,智能化技术还可 以通过数据分析和预测等方式,提高设备的可靠性和使 用寿命
电机驱动解决方案
电机驱动解决方案一、引言电机驱动解决方案是指为了实现电机的正常运转和控制而采取的一系列技术和措施。
在现代工业生产中,电机广泛应用于各个领域,如机械制造、汽车工业、航空航天等。
为了提高电机的性能和效率,需要采用合适的电机驱动解决方案。
二、电机驱动解决方案的基本原理1. 电机驱动系统的组成电机驱动系统主要由电源、电机、驱动器和控制器四个部分组成。
电源向电机提供所需的电能,驱动器将电能转换为机械能,控制器对驱动器进行控制,实现对电机的运转和控制。
2. 电机驱动的基本原理电机驱动的基本原理是根据电机的类型和工作要求,选择合适的驱动器和控制器,通过控制器对驱动器进行控制,使电机按照预定的要求进行运转。
常见的电机驱动方式包括直流电机驱动、交流电机驱动和步进电机驱动等。
三、电机驱动解决方案的分类根据电机的类型和工作要求,电机驱动解决方案可以分为以下几类:1. 直流电机驱动解决方案直流电机驱动解决方案适用于需要精确控制转速和转矩的应用,如机床、机器人、电动车等。
常见的直流电机驱动解决方案包括直流电机驱动器和直流电机控制器。
2. 交流电机驱动解决方案交流电机驱动解决方案适用于需要大功率输出和高效率的应用,如空调、电梯、水泵等。
常见的交流电机驱动解决方案包括变频器、伺服驱动器和电机控制器。
3. 步进电机驱动解决方案步进电机驱动解决方案适用于需要高精度定位和控制的应用,如CNC机床、纺织机械、印刷设备等。
常见的步进电机驱动解决方案包括步进电机驱动器和步进电机控制器。
四、电机驱动解决方案的选择和设计选择合适的电机驱动解决方案需要考虑以下几个方面:1. 电机的类型和工作要求根据电机的类型和工作要求,选择相应的驱动器和控制器。
例如,对于需要精确控制转速和转矩的应用,可以选择直流电机驱动解决方案;对于需要大功率输出和高效率的应用,可以选择交流电机驱动解决方案。
2. 功率和效率要求根据应用的功率和效率要求,选择合适的电机驱动器和控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阅读文章--机电之家步进电机规格种类型号大全[ 来源:'d' | 类别:技术| 时间:2009-5-11 15:59:23 ] [字体:大中小]前言:以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。
(3)混合式步进电机:也叫永磁反应式、永磁感应式步进电机,混合了永磁式和反应式的优点。
其定子和四相反应式步进电机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。
一般为两相或四相;须供给正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;是目前发展较快的一种步进电机。
6、步进电机按工作方式分类:可分为功率式和伺服式两种。
(1)功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电机)。
(2)伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电机)。
7、步进电机的选择:(1)首先选择类型,其次是具体的品种与型号。
(2)反应式、永磁式和混合式三种步进电机的性能指标、外形尺寸、安装方法、脉冲电源种类和控制电路等都不同,价格差异也很大,选择时应综合考虑。
(3)具有控制集成电路的步进电机应优先考虑。
8、步进电机的基本参数:(1)电机固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。
电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机工作时的实际步距角,实际步距角和驱动器有关。
(2)步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。
步进电机增加相数能提高性能,但步进电机的结构和驱动电源都会更复杂,成本也会增加。
(3)保持转矩(HOLDING TORQUE):也叫最大静转矩,是在额定静态电流下施加在已通电的步进电机转轴上而不产生连续旋转的最大转矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
(4)步距精度:可以用定位误差来表示,也可以用步距角误差来表示。
(5)矩角特性:步进电机的转子离开平衡位置后所具有的恢复转矩,随着转角的偏移而变化。
步进电机静转矩与失调角的关系称为矩角特性。
(6)静态温升:指电机静止不动时,按规定的运行方式中最多的相数通以额定静态电流,达到稳定的热平衡状态时的温升。
(7)动态温升:电机在某一频率下空载运行,按规定的运行时间进行工作,运行时间结束后电机所达到的温升叫动态温升。
(8)转矩特性:它表示电机转矩和单相通电时励磁电流的关系。
(9)启动矩频特性:启动频率与负载转矩的关系称为启动矩频特性。
(10)运行矩频特性/惯频特性:略(11)升降频时间:指电机从启动频率升到最高运行频率或从最高运行频率降到启动频率所需的时间。
(12)DETENT TORQUE:是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易产生误解;反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
9、步进电机的一些特点:(1)步进电机没有积累误差:一般步进电机的精度为实际步距角的百分之三到五,且不累积。
(2)步进电机在工作时,脉冲信号按一定顺序轮流加到各相绕组上(由驱动器内的环形分配器控制绕组通断电的方式)。
(3)即使是同一台步进电机,在使用不同驱动方案时,其矩频特性也相差很大。
(4)步进电机与其它电动机不同,其标称额定电压和额定电流只是参考值;又因为步进电机是以脉冲方式供电,电源电压是其最高电压,而不是平均电压,所以,步进电机可以超出其额定值范围工作。
但选择时不应偏离额定值太远。
(5)步进电机外表允许的最高温度:步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
(6)步进电机的力矩会随转速的升高而下降:当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。
在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
(7)步进电机低速时可以正常运转,但若高于一定频率就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
(8)四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。
串联接法一般在电机转速较低的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
(9)混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。
如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
(10)供电电源电流一般根据驱动器的输出相电流I来确定。
如果采用线性电源,电源电流一般可取I 的1.1~1.3倍;如果采用开关电源,电源电流一般可取I 的1.5~2.0倍。
(11)当脱机信号FREE为低电平时,驱动器输出到电机的电流被切断,电机转子处于自由状态(脱机状态)。
在有些自动化设备中,如果在驱动器不断电的情况下要求直接转动电机轴(手动方式),就可以将FREE信号置低,使电机脱机,进行手动操作或调节。
手动完成后,再将FREE信号置高,以继续自动控制。
(12)用简单的方法调整两相步进电机通电后的转动方向,只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。
10、步进电机驱动器的一些特点:(1)构成步进电机驱动器系统的专用集成电路:A、脉冲分配器集成电路:如三洋公司的PMM8713、PMM8723、PMM8714等。
B、包含脉冲分配器和电流斩波的控制器集成电路:如SGS公司的L297、L6506等。
C、只含功率驱动(或包含电流控制、保护电路)的驱动器集成电路:如日本新电元工业公司的MTD1110(四相斩波驱动)和MTD2001(两相、H桥、斩波驱动)。
D、将脉冲分配器、功率驱动、电流控制和保护电路都包括在内的驱动控制器集成电路,如东芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。
(2)“细分驱动”概述:概念:将“电机固有步距角”细分成若干小步的驱动方法,称为细分驱动,细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。
其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。
最新技术发展:国内外对细分驱动技术的研究十分活跃,高性能的细分驱动电路,可以细分到上千甚至任意细分。
目前已经能够做到通过复杂的计算使细分后的步距角均匀一致,大大提高了步进电机的脉冲分辨率,减小或消除了震荡、噪声和转矩波动,使步进电机更具有“类伺服”特性。
对实际步距角的作用:在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己对步距角的要求。