铝合金自动焊接焊缝跟踪技术研究
铝合金材料焊接技术研究进展
铝合金材料焊接技术研究进展铝合金材料焊接技术是一种非常重要的技术,随着人们对新材料的需求越来越高,铝合金材料焊接技术的研究也越来越深入。
目前,铝合金材料焊接技术已经发展到了比较成熟的阶段,但仍然有一定的问题存在。
本文将围绕铝合金材料焊接技术的研究进展,分别从焊接技术、焊接材料和焊接设备三个方面进行探讨。
一、焊接技术目前,常见的铝合金材料焊接技术主要有极限板厚薄板焊接技术、熔核焊接技术、电子束焊接技术、激光焊接技术等。
极限板厚薄板焊接技术是一种常见的技术,其主要特点是焊缝宽度较小,但焊接速度快,适合焊接铝合金材料的薄板。
熔核焊接技术是一种比较常见的技术,其主要特点是焊缝质量较高,但焊接速度相对较慢,适合焊接工程上的铝合金材料。
电子束焊接技术是一种高能量密度焊接技术,适用于焊接铝合金材料的高强度部位。
激光焊接技术是一种焊接速度快、焊缝热影响区小、适合焊接薄板的技术。
这些焊接技术均有其优点和缺点,需要根据实际需要选用合适的技术进行焊接。
二、焊接材料焊接材料对于焊接质量的影响非常大,目前常见的焊接材料主要有铝合金焊接材料和焊接钨丝。
铝合金焊接材料是一种用于焊接铝合金材料的特殊材料,可针对不同的铝合金材料选择不同的焊接材料进行焊接,并根据实际需要控制焊接时的温度和垂直度。
焊接钨丝是一种用于支撑焊接材料的材料,其主要作用是稳定熔池形态,提高焊接质量。
三、焊接设备焊接设备是焊接过程中非常关键的一环,目前常见的焊接设备主要有TIG焊机、MIG焊机、激光焊接设备和电子束焊接设备等。
TIG焊机是一种常见的焊接设备,主要用于焊接薄板和焊接形状复杂的铝合金材料。
MIG焊机是一种自动化焊接设备,其主要特点是高效率、高生产率和高质量。
激光焊接设备是一种高能量密度焊接设备,其优点是焊接高速、焊缝热影响区小,适合焊接铝合金材料的高强度部位。
电子束焊接设备是一种高能量密度焊接设备,其焊接质量较高,适用于焊接高难度或高质量要求的铝合金材料。
铝合金焊接技术的研究现状及发展趋势
铝合金焊接技术的研究现状及发展趋势发布时间:2022-11-08T07:23:33.659Z 来源:《福光技术》2022年22期作者:袁江[导读] 铝合金具有较高的比强度、良好的耐蚀性,并且材料品种覆盖范围大,是优良的轻质结构材料,在汽车、轨道交通、航空航天及船舶等行业获得广泛应用。
新疆乌鲁木齐石化公司检维修中心维修二车间新疆乌鲁木齐 830019摘要:长期以来,铝合金激光焊接是科研院所和企业持续进行技术研究和应用的难点和热点领域,随着市场对结构轻量化需求的持续增长,以及国产高功率激光器、激光头产品逐渐发展成熟,激光焊接系统成本呈现下降趋势。
在此背景下,限制铝合金激光焊接应用扩大的关键瓶颈将由成本投入向焊接工艺转变,突破新型/难焊铝合金材料、以及厚板复杂结构在特定应用场合的激光焊接工艺将成为铝合金激光焊接技术的发展趋势和应用增长的动力源泉。
关键词:铝合金;激光焊接;焊接工艺;应用铝合金具有较高的比强度、良好的耐蚀性,并且材料品种覆盖范围大,是优良的轻质结构材料,在汽车、轨道交通、航空航天及船舶等行业获得广泛应用。
近年来,激光焊接作为高效率、低热输入、高柔性的高质量连接技术在国内市场获得越来越多的关注和应用。
铝合金激光焊接技术的应用和发展主要受到三方面因素的影响:一是铝合金材料的发展,材料的焊接性与满足应用条件的强塑性、耐蚀性等性能提升;二是激光焊接工艺研究与焊接质量评估的成熟度;三是激光焊接设备,包括激光器的快速发展,以及激光束的输出形式、调控方式的多样化等。
在上述基础上,针对不同行业、场景的应用需求,可供选择与搭配的激光焊接系统在成本和工艺上更具有灵活性和适用性。
1 铝合金焊接技术的研究现状1.1 传统焊接技术铝合金的传统焊接技术包括TIG焊、MIG焊、等离子弧焊等。
这些技术的焊接工艺已经比较成熟,现阶段的研究重点在于改善与创新。
1998年由肯塔基大学的机器人及制造系统中心和美国国家科技基金资助而研制的双焊枪TIG焊,可以不用填充焊丝,并能增加熔深;芬兰Kemppi公司2001年在市场上推出的一款全数字化脉冲(double pulse)MIG焊机Kemppi pro Evolution,使得送丝速度与脉冲频率相适应从而提高焊接质量;美国航空航天管理局(NANA)对变极性进行了大量的研究,成功研制了以变极性等离子弧焊工艺(VPPAW)为核心的焊接技术和相应的设备,并成功地实现了厚板铝合金构件的焊接。
铝合金焊接技术和应用研究
铝合金焊接技术和应用研究铝合金是一种广泛应用于工业领域的材料。
铝合金具有轻质、高强度、耐腐蚀等优点,在航空、汽车、船舶等领域得到了广泛应用。
铝合金的焊接技术也随着使用领域的不断扩大而得到了更多的研究和应用。
一、铝合金焊接技术概述铝合金焊接技术主要包括氩弧焊、TIG焊、MIG焊、激光焊等不同种类。
其中,氩弧焊是目前应用最为广泛的一种焊接技术。
氩弧焊具有焊缝质量好、成本低等优点,可用于航空、航天、汽车等领域的铝合金结构件的焊接。
TIG焊是一种适用于薄壁铝合金材料的焊接技术。
TIG焊具有功率控制、热输入量小、焊接速度快等优点,在航空、电子等领域得到广泛应用。
MIG焊是近年来发展起来的一种新型铝合金焊接技术。
MIG焊具有焊缝良好、成本低等优点,在汽车、电子、造船等领域的铝合金焊接中得到了广泛应用。
激光焊是一种适用于高要求、高精度、高效率的铝合金焊接技术。
激光焊是一种非接触式焊接技术,具有热影响区小、精度高、速度快等优点。
目前,激光焊用于航空、航天、汽车、电子等领域的高精度铝合金焊接中。
二、铝合金焊接技术的应用研究在航空领域,铝合金结构件的焊接质量直接关系到航空器的飞行安全。
目前,航空领域广泛应用TIG焊和高能激光焊技术。
高能激光焊具有焊缝几乎无顶部缺陷、堆焊率高等优点,是目前最为理想的航空领域铝合金结构件的焊接技术。
在汽车领域,铝合金的轻量化特性得到广泛应用。
铝合金车身结构件的焊接技术是汽车工业发展的重要技术之一。
目前,汽车领域广泛应用MIG焊、TIG焊和激光焊技术。
相较于氩弧焊来说,MIG焊和TIG焊在铝合金车身结构件的焊接中具有更好的适应性和焊缝品质。
在电子领域,铝合金是电子外壳的常用材料。
铝合金外壳的焊接技术直接关系到电子设备的密封性和机械强度。
目前,电子领域广泛应用TIG焊、激光焊技术。
相较于TIG焊来说,激光焊具有焊缝更细、威胁成像性好等优点,更适用于电子外壳的高密度、高精度焊接。
三、铝合金焊接技术的未来发展趋势随着新材料、新工艺的不断涌现,铝合金焊接技术也将不断发展。
铝合金MIG焊接工艺研究及应用论文
试论铝合金MIG焊接工艺研究及应用【摘要】文章对铝合金mig焊接工艺进行了研究【关键词】铝合金;mig序言高强铝合金具有很高的室温强度及良好的高温和超低温性能,广泛应用于航空、航天及其它运载工具的结构材料,如:运载火箭的液体燃料箱、超音速飞机和汽车的结构件以及轻型战车的装甲等。
目前常用于铝合金连接的主要焊接方法有:交流钨极氩弧焊(tig)和直流反极性熔化极气体保护焊(mig)。
tig焊由于采用交流电,钨极烧损严重,限制了所使用的焊接电流,而且此法熔深能力弱,因此只适用于薄件铝合金的焊接。
mig焊包括连续电流焊接和脉冲电流焊接。
mig焊时,焊丝做为阳极,可采用比tig焊更大的焊接电流,电弧功率大,焊接效率高,故特别适合于中厚板铝合金的焊接。
实验研究发现,在铝合金mig焊时,脉冲电流焊接优于连续电流焊接,它提高了铝合金焊缝金属的强度、塑性和疲劳寿命。
为进一步提高电弧的稳定性、改善焊缝成形和增加熔深以及厚板铝合金的高效焊接,近几年国外发展了单丝复合脉冲mig焊和双丝tandem mig焊方法,本文针对30mm厚的7a52中厚板高强铝合金,进行了单丝单脉冲、复合脉冲和双丝tandem mig焊工艺的研究,并应用于生产中。
1 tandem双丝焊和单丝复合脉冲mig焊原理tandem双丝焊是将两根焊丝按一定角度放在一个特别设计的焊枪里,两根焊丝分别由各自独立的电源供电。
除送丝速度可以不同外,其它参数,如:焊丝的材质、直径、是否加脉冲等都可彼此独立设定,从而保证了电弧工作在最佳状态。
与其它双丝焊技术相比,由于两根焊丝的电弧是在同一熔池中燃烧,提高了总的焊接电流,因此提高了熔敷效率和焊接速度。
同时由于两根焊丝交替送进同一熔池,对熔池具有搅拌作用,而降低了气孔敏感性,改善了焊缝质量。
1.1 同频率同相位的(适合焊接钢)1.2 同频率相位差180度(适合焊接铝)1.3 不同频率相位任意(适合焊接钢)单丝复合脉冲焊接工艺是采用一个低频的协调脉冲对另一个高频脉冲的峰值和时间进行调制,使脉冲的强度在强、弱之间低频周期性切换,得到周期性变化的强弱脉冲群。
焊缝跟踪和焊缝寻位的原理
焊缝跟踪和焊缝寻位的原理
一、焊缝跟踪原理
焊缝跟踪是焊接过程中的一项重要工作,它能够确保焊接质量和工艺
参数的一致性。
其原理是通过焊缝检测传感器或视觉传感器对焊接过
程中的焊缝进行实时监测,根据预置的规程控制焊接电流和速度实现
焊接质量的稳定性。
焊缝跟踪系统一般由控制器、传感器、信号接口等组成。
其中,传感
器可分为近红外传感器、激光传感器、摄像头传感器等,根据不同的
焊接场景选择相应的传感器。
通过掌握焊接过程中的实时参数,如焊
接速度、电流强度、电压等,可以及时调整焊接参数,确保焊接质量。
二、焊缝寻位原理
焊缝寻位是焊接前的重要工作,它可以在焊接前精确定位焊接部位,
降低焊接质量测评成本,提高焊接效率。
焊缝寻位技术可以通过机械
手臂、计算机视觉、激光测量等方式实现。
消费电子产品采用的主要焊缝寻位技术是机械手臂寻位,通过机械臂
精确控制焊枪位置,实现对焊接部位的寻位。
另外,一些大型生产厂
家也使用了激光测量的方法,在焊接前使用激光传感器对焊接部位进行测量,确定焊接位置。
三、焊缝跟踪与焊缝寻位的关系
焊缝跟踪和焊缝寻位是两个不同的概念,但它们在焊接中有着密切的关系。
首先,焊缝寻位可以为焊缝跟踪提供准确的焊接部位信息,避免焊接过程中出现偏差。
同时,焊缝跟踪技术也可以为焊缝寻位的自动化提供支持,通过对焊接过程中的数据分析,优化焊缝寻位方案,提高寻位精度和效率。
总之,焊缝跟踪和焊缝寻位是两项相互依存的技术,在焊接过程中都发挥着重要作用,提高焊接质量,降低成本。
济南焊缝跟踪工作原理
济南焊缝跟踪工作原理
济南焊缝跟踪的工作原理是通过使用光电传感器和图像处理技术来实现的。
具体工作原理如下:
1. 光电传感器检测:焊接过程中,光电传感器被安置在焊缝附近,探测器将检测到的光信号转换为电信号,并将其传送到控制系统。
2. 图像处理:控制系统接收到光电传感器传来的电信号后,通过图像处理的算法将其转换成可视化的图像或视频。
图像处理技术可以对图像进行增强、滤波和分割等处理,以便更好地检测焊缝。
3. 焊缝识别:通过图像处理技术,控制系统可以对焊缝进行识别和提取。
通过分析焊缝图像的特征,如形状、颜色和纹理等,识别出焊缝的位置和形状。
4. 焊缝跟踪:一旦焊缝被识别出来,控制系统将根据焊缝的位置信息调整焊接机器人或焊接设备的位置和姿态,以保持焊接点与焊缝的对齐。
5. 实时反馈:焊接过程中,控制系统可以实时监测焊缝的跟踪情况,并根据需要进行实时调整。
如果焊缝位置发生变化或偏移,控制系统将发出指令以修正焊接点的位置,以确保焊接质量。
综上所述,济南焊缝跟踪工作原理主要涉及光电传感器检测、
图像处理和焊缝识别等步骤,通过实时反馈和调整,实现焊接点与焊缝的精确对齐。
这种方法可以提高焊接的精度、效率和质量。
焊缝跟踪的实时跟踪控制算法
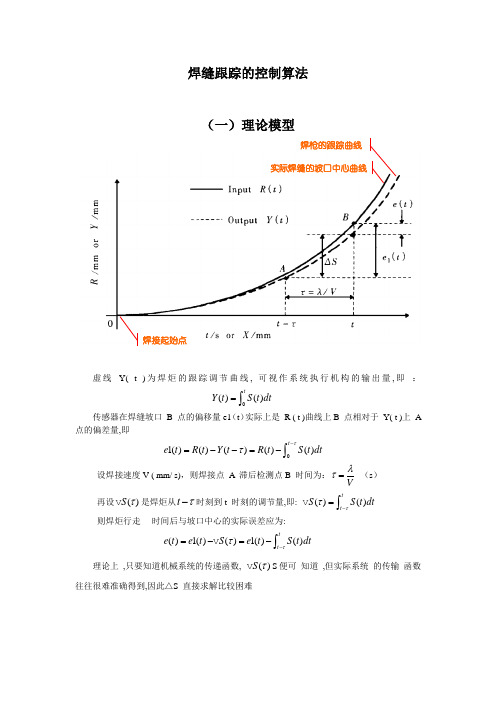
焊缝跟踪的控制算法(一)理论模型虚线 Y( t )为焊炬的跟踪调节曲线, 可视作系统执行机构的输出量,即 :()()tY t S t dt =⎰传感器在焊缝坡口 B 点的偏移量e1(t )实际上是 R ( t )曲线上B 点相对于 Y( t )上 A 点的偏差量,即1()()()()()t e t R t Y t R t S t dt ττ-=--=-⎰设焊接速度V ( mm/ s),则焊接点 A 滞后检测点B 时间为:Vλτ= (s )再设()S τ是焊炬从t τ-时刻到t 时刻的调节量,即: ()()tt S S t dt ττ-=⎰则焊炬行走 时间后与坡口中心的实际误差应为:()1()()1()()tt e t e t S e t S t dt ττ-=-=-⎰理论上 ,只要知道机械系统的传递函数,()S τS 便可 知道 ,但实际系统 的传输 函数往往很难准确得到,因此△S 直接求解比较困难焊接起始点实际焊缝的坡口中心曲线焊枪的跟踪曲线(二)由模型得出的简易控制算法实际的焊缝跟踪过程中,视觉系统提供的位置偏差是经过传感器经过一帧一帧的图像采集后,再经过一系列的图像处理,最终得出位置偏差信息提供给控制器。
因此,需做以下设定:(1) 位置请求指令发送时间间隔和执行机构调整时间间隔同步; (2) 在每次位置请求时,在上一调整周期内焊枪已完成所需的调整量; (3) λ为采样间隔点的整数倍。
设O 点为初始参考点,O 0为焊枪开始纠正起始点,从O 点到O 0点,视觉传感器只做图像采集,焊枪并不进行跟踪,这一段距离属于“盲区”。
i e 为每次识别的坡口中心点与初始参考点之间的差值,i m 为每一步的焊枪实际跟踪量。
系统焊枪实时跟踪量m i 的算法为: 1()i ii a i i am em ---=-∑ ( i=a ,a+1,···,n )焊接方向(三)根据简易控制算法得出的两种方案第一种方案:焊接过程中,在焊接速度方向上,焊枪相对工件每移动固定的距离,完成一次调整,或者说,每移动固定的距离,控制器向传感系统发出一次位置请求指令。
焊缝跟踪技术的应用探析
焊缝跟踪技术的应用探析摘要:在焊接生产过程中,不同的产品通常需要特定的焊接设备及工装夹具,需要设计不同类型的生产线及生产流程,即便是同类产品,由于型号不同,通常也需要更换工装夹具。
同时由于工件在组对过程中存在组对误差,加工过程存在加工误差,因此会导致实际焊接的工件与设计图样存在差异,工件一致性较差,对于机器人焊接来说简单的示教通常存在较大的误差。
在焊接过程中的热形变也会引起误差,造成焊接缺陷。
以上问题在一般工业生产中普遍存在,这就需要焊接自动化生产线具有精确定位工件和纠正偏差的能力,同时在焊接过程中能够对焊缝实时检测,调整焊接的路径,纠正焊接的偏差,保证焊接的质量,这样也可以大幅降低操作人员的工作量,提高焊接效率,降低制造成本,实现智能的柔性制造。
关键词:焊缝跟踪技术;应用;分析下文综合了近年来焊缝跟踪领域相关文献及新技术、新应用,分析了各种焊缝跟踪方式的特点,指出基于激光结构光的焊缝定位及跟踪方式将有更大的优势及更宽广的发展空间。
分析展望了未来基于激光结构光的焊缝跟踪新技术与新应用。
1 焊缝跟踪技术的应用现状在实际焊接行业中,由于机械式接触传感技术存在精度差、易磨损的问题,应用已经较为少见。
目前,在实际生产中应用最为广泛的是非接触式的电弧跟踪及基于视觉传感器的跟踪方法。
1.1电弧跟踪电弧跟踪的基本原理是检测焊接电流和电弧电压的变化,来表达电弧长度的变化,从而推算焊枪与焊缝的相对高度及与焊接坡口的相对位置关系,通过焊接执行机构的实时调节,实现焊接过程中的实时电弧跟踪。
但是在实际中电弧长度与焊接电流、电弧电压之间的精准数学模型难以确定,特别是在熔化极电弧焊接过程中,焊接坡口的准确尺寸也难以在线实时检测,以及电弧跟踪需要角接焊缝、摆动焊接等限制条件,因此电弧实时跟踪的应用具有较大的局限性。
1.2基于三角测距原理的激光结构光检测该方法具有对比度高、精度高、实时性强、无接触等特点,得到了广泛应用。
在实际使用中,激光结构光有多种类型,如单线结构光、多线结构光、圆形及椭圆结构光、点阵等。
铝及铝合金焊接工艺研究

铝及铝合金焊接工艺研究摘要:有色金属(non-ferrousmetal),狹义的有色金属又或简称其为非铁金属,是对我国除铁、锰、铬以外的所有金属的统称。
广义的有色金属还包括有色合金。
有色合金是以一种有色金属为基体含量通常大于50%,在其中混合一种或者几种不同的金属元素形成的合成金属。
有色金属是国家实力、航空航天、国防工业和科技发展不可缺少的基本材料和重要战略物资。
没有有色金属,就不能实现农业现代化、工业现代化、国防现代化。
比如,飞机、雷达、火箭、核潜艇、航空母舰等尖端武器,以及先进技术,如原子能、电视、通信、雷达、电子计算机所需的构件或部件,大多由有色金属中以及轻金属和稀有金属构成;此外,没有镍、钴、钨、钼、钒、铌等有色金属,也不能生产合金钢。
有色金属在电力、航空航天等行业的使用量也是非常大的。
有色金属在工业发达国家也属于国家级别战略资源,国与国之间的竞争也非常激烈。
关键词:铝及铝合金;焊接工艺;策略1铝合金的分类硬铝:硬铝就是指以铜为主要合成元素的铝合金,硬铝具有良好的机械性能,强度比其他铝合金要大,而且硬铝的密度小,可以用于制作轻型结构材料。
为了增加铝合金的抗拉强度,需控制合金中铜的含量,铜含量不得超过4%。
锰含量也是影响铝合金硬度的主要成分,铝合金中加入适量锰,主要目的是降低铁与铝发生对抗性,而对铝合金性能产生的影响。
一般的硬铝中,严格控制Mn的含量小于1%。
在硬铝中可以加入少量的钛,合金晶粒得到一定细化。
铝合金合成元素中,镁、铜、硅等元素可快速形成且属于可溶性有机化合物,硬铝合金通过高温加热时,其性能更加优良。
铜铝在高温退火过程中的抗拉性能和强度一般在160Mpa~220Mpa之间,经高温淬火和加速时效后其抗拉强度可提高到312Mpa~460Mpa。
由于硬铝抗腐蚀性能不佳,为增强铝合金的抗腐蚀性,可在硬铝合金外层增加一层保护膜。
硬铝的缺点主要有:(1)硬铝的抗腐蚀性较差,所以一般要在硬铝焊件的表面镀上一层工业纯铝,来保护件不被腐蚀,这种材料被叫做包铝硬铝,当材料有包铝层时,它的强度会因纯铝的厚度降低强度。
2219铝合金厚板MIG焊的工艺研究
332219铝合金厚板MIG 焊的工艺研究司子华 张明新 郭旭东 李海燕 (山西长治清华机械厂,长治 046012)摘要:在工厂条件下, 对35mm 厚2219铝合金采用MIG 焊进行对接双面焊,通过调节焊接电流、电弧电压、焊接速度、氩气流量等控制焊缝成形及焊接质量的关键参数,试制成功35mm 厚2219铝合金板材粗丝MIG 焊对接双面焊的焊接工艺。
焊后发现,35mm 厚2219铝合金焊缝表面鱼鳞纹均匀,焊道宽窄、高低一致,成形美观。
X 光射线探伤实验表明,焊缝质量符合QJ176A —99《地面设备熔焊技术条件》Ⅰ级焊缝标准。
关键词:2219铝合金;厚板;MIG 焊Research on MIG Welding of 2219 Aluminum Alloy Thick PlatesSi Zihua Zhang Mingxin Guo Xudong Li Haiyan (Changzhi Qinghua Machinery Factory, Changzhi 046012)Abstract :The double sides MIG welding can be adopted to handle 2219 aluminum alloy plates with thickness 35mm in factory, herein the figuration of welding seams and the key parameters of welding quality can be controlled effectively throughout the adjustment of welding current, arc voltage, welding speed, and argon flow. After finishing the welding, it can be seen that the surface ripples of the welding seams are homogeneous and the welding bead has the same width and height. Furthermore, the result of X-ray detection proves that the quality of welding seams are completely in accordance with the standard QJ176A —99Ⅰstipulated in “The Technical Specification of Fusion Welding by Ground-based Devices” .Key words :2219 aluminum alloy ;thick plate ;MIG welding 1 引言2219铝合金属硬铝合金,可热处理强化,在-235℃至+200℃均具有良好的力学性能、抗应力腐蚀 性能,在航空、航天领域有着广泛的应用。
焊缝跟踪技术
xi (xu cx ) sx
yi
( yu
cy )
sy
xu,yu,cx,cy:像素坐标Ou
sx, sy:单位距离上的像素点
.
3
1
D
O
β
h
P
ΔZ
F1 F
f
FF1=I
2
3
4
1.激光发生器 D成像靶面 D摄像机透镜 4.被测平面
htgaD rctIg/ f
ZhDtg
.
4
1
4
5
2
6
姿态修正
实际轨迹 修正后轨迹
示教轨迹
ε :设定偏差 0.2-0.3 mm
姿态修正较复杂,一般传感系统不采用
.
9
激光扫描焊缝跟踪传感器
.
传感器控制系统
10
长征系列火箭贮箱箱底. 机器人自动焊接系统
11
双目视觉导引/跟踪、熔透控制传感器系统
.
12
双目视觉导引/跟踪、熔透. 控制传感器系统
13
基于视觉传感的多机器人智能化焊接系统
第6章 焊缝跟踪技术
1. 激光扫描视觉传感器原理 2. 焊缝类型识别和特征提取 3. 机器人直接视觉跟踪系统实现
.
1
一、激光扫描视觉传感器原理
基 于 三 角 测 量 原 理
.
2
标定
需标定的摄像机内参数有 (cx, cy),sx,sy,k及f 等六个参数
xi
yi
xn (1 kr 2 ) yn (1 kr 2 )
Δ
激光扫描Y型坡口轮廓线
.
6
V/Y型坡口接头轮廓模式示意图
搭接接头轮廓模式示意图
对接无坡口轮廓示意图
焊缝跟踪系统
焊缝跟踪系统简介焊缝跟踪系统是一种自动化设备,用于跟踪焊缝的位置,控制焊接机器人或激光焊接机的运动,保证焊接质量,提高焊接效率。
该系统常用于汽车工业、航空航天工业等领域。
功能焊缝跟踪系统可以自动识别焊缝位置和形状,实现焊接轨迹的自动规划和控制,避免人为因素对焊接质量的影响。
常见的焊缝跟踪系统有激光焊接跟踪系统和焊接机器人跟踪系统。
激光焊接跟踪系统激光焊接跟踪系统是利用两个激光发射器形成的光线在焊缝上形成一条光线。
通过摄像机识别光线,并计算出光线与焊缝的距离和角度,并将这些数据输入到焊接控制系统中,从而控制激光焊接机在焊接过程中自动调整焊缝位置。
焊接机器人跟踪系统焊接机器人跟踪系统是基于视觉传感器实现的。
该系统通过视觉传感器获取焊接工件信息,如焊缝位置、高度和宽度等,从而我们可以预先设置焊接机器人的轨迹和焊接参数,达到自动焊接的目的。
该系统在焊接不规则形状的焊缝时具有很大的灵活性和自适应性。
其他特点除了基本的焊缝跟踪和控制功能外,还有许多其他特点和增强功能。
自适应焊缝跟踪系统可以根据不同的焊接工件形状和位置进行自适应调节,提高焊接质量和效率。
精度高焊缝跟踪系统采用高精度传感器,可以实现焊缝位置的精确测量和控制,提高焊接的稳定性和一致性。
交互性现代的焊缝跟踪系统配备了用户友好的交互界面,可以通过触摸屏等方式轻松地进行设备配置和操作。
应用领域焊缝跟踪系统可以应用于以下领域:•汽车制造业:焊接汽车车身和底盘。
•航空航天工业:焊接飞机结构和部件。
•电子制造业:焊接电子元器件。
•其他:如船舶制造、建筑结构等。
发展趋势随着焊接技术的进步和产业的发展,焊缝跟踪系统也在不断地发展和进化。
目前,焊缝跟踪系统正向更高的自动化、智能化和高精度发展。
未来,该技术将应用于更多的领域,并为生产效率与品质提供新的保障。
焊缝跟踪原理

焊缝跟踪原理
焊缝跟踪是一种自动化的焊接质量检测技术,主要用于对焊缝进
行实时监测和记录。
它采用高精度传感器对焊缝进行实时检测,将检
测到的数据传输给计算机进行分析,从而实现对焊接过程的全程跟踪。
焊缝跟踪技术的应用不仅可以提高焊接质量,增加产品性能,还可提
高工作效率,降低生产成本。
焊缝跟踪技术的工作原理主要有两种:一种是通过激光测距仪等
传感器对焊缝进行三维点云的扫描,然后通过算法处理生成二维或三
维的焊缝模型,再根据焊缝模型进行数据的分析和处理。
另一种是利
用高速相机对焊缝进行实时图像捕捉和处理,从而实现对焊缝质量的
判断。
这两种方法都可以实现对焊缝进行全程监测和记录,保证焊接
质量的稳定性和可靠性。
在焊缝跟踪的实际应用过程中,需要注意以下几点:
1. 焊接环境不能影响焊缝跟踪的准确性,应避免强光照射、强磁
场等情况。
2. 焊接工艺参数需要根据焊缝跟踪的结果进行调整,以提高焊接
质量。
3. 焊接机器人等设备需要进行定期维护和保养,以确保焊接质量
的稳定性和可靠性。
4. 焊缝跟踪的数据记录和处理需要进行有效管理,以备后续分析和查询。
总之,焊缝跟踪技术的应用可以提高焊接质量和效率,是现代化生产的必备技术之一。
在实际应用过程中,我们需要根据实际情况进行合理的设计和调整,以达到最佳的效果。
焊缝跟踪系统及焊接过程智能控制技术的研究

焊接过程是一个复杂 的过程 , 由于非线性及干扰 因素 多等 特点 , 因而很难建立起 精确的数学模 型 。使用经典控制理论 和 现代控制理论难 以实现 自动控 制 ( 或控 制效 果不佳 ) 。而智 能
汽机控 制 , 并取得 了比传统 的 D C控制 更好 的效果 , 的成 功 D 它 标志着模 糊逻辑用于工业控制 的开始 。
康 丽 汤 楠 穆 向 阳
( 西安石 油 大学 自动 化实 验室 )
摘 ・ : 要 焊缝跟踪过程 的 自动化和智能化是 未来焊接技术 的发展 方向。文章介 绍 了经典控 制 、 模糊控制 、 家系统 、 经 网络和复合控制智 能控制理论及其在 焊接过程控制 的应用 , 专 神 分析和探讨 了焊接过程 智能控 制技 术的发展 现状及 趋势 。为以后 智能焊接技 术的研
维普资讯
山西科 技
S A X CE C N E H O O Y H N I IN EA D T C N L G S
20 年 第 3 08 期
5月 2 0日出版
● 应 用 技 术
焊 缝 跟踪 系 统 及 焊 接 过 程 智能 控 制 技 术 的 研 究
控制作为一种通过定性与定量相结合 的综合集 成方法 , 是人 工
智能和控制系统相结合 的产物 , 能够针对系统环境和任务 的复 杂性 、 模糊性 和不确定性 , 有效实现复杂 的信息处理 功能 , 因此 比现代控制理论 中系统辨识 的 自适应控制 具有更好 的鲁棒性 。
模糊控制方法吸收 了人的思维具有模糊性的特点 , 利用模 糊数 学中的隶 属函数 、 模糊关 系 、 糊推理 得到控 制动作 。根 模
2. 焊 接 跟 踪 过 程 模 糊控 制 2
围之内。在焊缝 跟踪系统 中, 据求 得的焊缝中心与焊矩在 图 根 像中的位置 , 以方便地求 出焊矩偏 离焊缝 中心线 的偏差信号 可 和方向信号。左偏 时 , 比例 纠正电机正转 , 带动焊矩 右移 , 靠近
焊接温度场焊缝识别及焊缝跟踪技术研究

。
围绕这 个问题 , 人们 提 出 了许多 解决方 法 例
如激 光扫 描跟踪 技术 、 转 电弧传感 跟 踪技术 等 . 旋 然 而这 些 技 术在 实 际应 用 中存 在 着各 自的局 限 。 焊 接 温 度 场 能 反 映 焊 接 的 动 态 过 程 , 过 对 焊 接 通
明 , 设 计 的 系 统 能 够 准 确 识 别 焊 缝 位 置 , 现 了 所 实
焊缝 跟踪智 能控 制 , 系统运 行稳 定 、 可靠
1 焊缝 跟 踪 模 糊 控 制 系 统
见 图 1 系 统 由被 控 对 象 、 . 温度 场 传 感 器 图 像 卡 、 控 机 、/ 接 口 以及执 行 机 构 组 成 , 中 工 IO 其 温 度场传感 器 由双色 滤光 片和 I C 构成 。 CD
I | }
图 I 焊缝 跟 踪 控 榭 系 统框 图
( b】
焊 接 过 程 中 , 接 温 度 场 传 感 器 将 拍 摄 的 焊 焊
圈 2 实 际拍 摄 的焊 接 温 度 场 图 像
对 称 性 得 出 。 种 现 象 表 明 。 果 焊 炬 与 焊 缝 对 这 如
收 稿 B期 : 0 d l 一: 2 o l 7 4
焊 缝 跟 踪 模 糊 控 制 系 统 , 成 功 地 应 用 于 焊 缝 已
为 8位 数 字信 号 表示 的 26个灰 度 等级 , 5 经过 双 色温 度场传 感器标 定后 可 以表 示实 际 的温度 场分
布 。 里采集 的 7 0 0 这 0 X 5 0个焊接 温度 场分 布像素 对应 实 际焊件 的物理 尺寸 是 3 r 5 mX 2 rm。图 2 a 5 a 为 实际拍 摄 的焊接 温度场热 图像 , 2 图 a焊炬 与焊 缝基 本吻 合且 焊缝 信息十分 明显 , 2 图 b焊炬 偏离 焊 缝且 焊缝 信 息 比较模 糊 . 但从 视 觉上 都 可 以看
焊缝跟踪技术的应用研究

第2 3卷 第 3期
V0 . 3 No. 12 3
湖 北 工 业 大 学 学 报
J u n lo b i ie st fT c n lg o r a fHu e Un v riy o e h o o y
与智 能 机 械 .
维普资讯
第2 3卷 第 3期
黄荣杰等
焊 缝 跟 踪技 术 的 应 用 研 究
9 1
A, B之 间 , 不 能 同时 与 二 者 接 触 ; 杆 铰 接 在 探 但 杠 头 的调 整机 构上. 一旦 永 磁 铁 没 有 处 于焊 道 正 中间 位 置 , 受到 不平衡 磁 力 的影 响 , 杆必 然发 生倾 斜 将 杠 并与触 头 A或 B发 生接 触. 图 2中忽 略 了杠 杆 的 厚度 . 永 磁 铁探 头 处 于 若 焊 道 中 间偏 左 位 置 , 杠 杆 与 触 头 B接 触 ; 探 头 则 若 处 于焊 道 中 间偏 右 位 置 , 杠 杆 与触 头 A 接 触 . 则 杠 杆 接上 电压信 息 , 检 测触 头 A 和 B的 电压 信 息 , 并
吸 引 至距 离 坡 口面 较 近 的 一 方 . 据 上 述 原 理 可 以 根
导致严重 的飞溅 、 孔 、 不透 等 焊 接缺 陷. 于 大 气 焊 对 多数焊 接情况 而言 , 接接头 的规范性 不高 , 焊 夹装误 差, 以及焊接机 器人或 焊接专 机本身 的误差 等 因素 , 焊枪与 焊缝 的相对 位置 并 不 十分 准 确 和稳 定. 保 要 证 焊枪 头部与 焊缝 相对 位 置 的准 确 性 与稳 定性 , 必 须采用 相应 的检测 元件 , 对焊 接V 坡口 型
u 坡 口 型
图 1 常 用 焊 缝坡 口形 式
焊缝跟踪发展现状及未来趋势分析
焊缝跟踪发展现状及未来趋势分析焊接是一种常见而重要的工艺,广泛应用于各个行业的制造和维修过程中。
而焊缝跟踪作为焊接过程中的重要环节,旨在实时监测和控制焊缝的质量,以保证焊接工艺的稳定性和可靠性。
本文将对焊缝跟踪的发展现状及未来趋势进行分析,并探讨其对焊接工艺的影响和应用前景。
首先,焊缝跟踪技术的发展现状是值得关注的。
随着科技的进步和自动化程度的提升,焊缝跟踪技术已经取得了显著的进展。
传统的焊缝跟踪方法主要依赖于人工观察和记录,而现代化的焊缝跟踪技术则借助于计算机视觉和机器学习等先进技术,实现了自动化和智能化的监测与控制。
通过对焊缝形状、尺寸、位置和质量等关键参数的实时测量和分析,焊缝跟踪系统能够及时发现和纠正焊接过程中的异常情况,提升焊接质量和效率。
其次,焊缝跟踪技术在焊接工艺中的应用越来越广泛。
焊缝跟踪技术不仅仅能够监测焊接过程中的实时参数,还可以记录并分析历史数据,为焊接工艺的研究和改进提供有力的支持。
例如,通过对焊缝形态的跟踪和分析,可以评估焊接质量的可靠性和一致性,并通过优化焊接参数,提高焊接工艺的稳定性和可靠性。
此外,焊缝跟踪技术还可用于焊接过程中的质量控制和检测,以避免焊接缺陷和质量问题的发生,提高产品的制造质量和可靠性。
未来,焊缝跟踪技术将继续发展并有望取得更大的突破。
首先,随着人工智能和大数据分析等技术的不断成熟,焊缝跟踪系统的智能化和自适应能力将得到进一步提升。
通过机器学习和深度学习等算法的应用,焊缝跟踪系统能够更好地适应不同焊接工艺和材料的特点,实现个性化和定制化的焊接过程控制,进一步提高产品的质量和效率。
其次,焊缝跟踪技术在焊接工艺中的应用领域将更加广泛。
目前,焊缝跟踪技术主要应用于工业制造领域,如汽车、造船、航空航天等。
然而,随着新兴行业的兴起和发展,焊缝跟踪技术可能被应用于更多领域,如新能源、智能制造、生物医药等。
例如,在新能源领域,焊缝跟踪技术可被用于太阳能电池板的生产和组件制造过程中,以提高太阳能电池板的效率和稳定性。
自动焊缝跟踪系统的设计与实现

自动焊缝跟踪系统的设计与实现摘要:本文介绍了一种基于旋转电弧传感器的焊接机器人系统。
系统采用惯量小,成本低,灵活性大的新型十字滑块系统作为机械传动机构;旋转电弧传感器的位置精度高,焊缝偏差小,使用各类焊缝类型;配合步进电机完成整个系统位移单元的传动,并进行位置伺服。
环境预检测系统完成工作环境的检测,确保系统的安全运行,DSP主控系统完成整个系统的管理和控制,并设计了包括软件保护,机械限位保护,报警保护,电源管理保护在内的各种保护措施。
为了方便系统的维护和升级,预留了标准的串口和以太网接口,可以方便对系统进行扩展升级。
关键词:焊缝跟踪;旋转电弧传感器;位置伺服;十字滑块目录1项目背景 02设计要求和需求分析 03系统总指标分析 (1)3.1 系统静态指标 (1)系统动态指标 (1)运动精度指标 (1)智能性指标分析 (1)可扩展性指标分析 (1)应用指标 (1)环境要求 (2)装配指标分析 (2)4 模块设计指标和方案分析 (2)总体设计方案 (2)主控系统指标分析和方案比较 (3)机械结构指标分析和方案比较 (3)4.4 反馈系统模块指标分析和方案比较 (5)运动控制模块指标分析和方案比较 (6)机械保护模块的指标分析和方案比较 (6)环境检测保护模块指标分析和方案比较 (7)接口扩展模块指标分析和方案比较 (7)4.9 电源管理模块指标分析和方案比较 (7)4.10 焊接指标分析与方案论证 (8)5硬件系统方案的实现 (8)总控制核心系统的实现 (8)机械传动结构方案的实现 (9)反馈系统模块的实现 (13)5.3.1 电弧传感器的分类及选型 (13)5.3.2 旋转电弧传感器结构与工作原理 (16)5.3.3 跟踪与纠偏原理 (17)运动控制模块的方案实现 (19)步进电机的选取 (19)步进电机驱动器的选取 (21)直线步进电机的选取 (22)直线步进电机驱动器的选取 (23)5.5 机械保护模块方案实现 (24)环境检测系统的实现 (24)接口扩展模块的方案实现 (26)5.8 电源管理模块方案的实现 (27)报警模块的方案实现 (28)6软件控制平台的实现 (28)传感器的控制算法和模型 (28)6.1.1 传感器与系统的初始化 (28)6.1.2 传感器的算法分析 (29)6.1.3 电弧长度模型与平面拟合算法分析 (30)电机驱动的算法 (32)7 成本估计 (33)8 项目总结与改良 (33)8.1 项目总结 (33)8.2.1 旋转扫描电弧传感器的问题与改良 (34)8.2.2 系统与无线传感网络的通信 (34)8.2.3 系统的可移植性改良 (34)9 心得体会 (34)参考文献: (37)附件分工明细 (38)1项目背景焊接是一门材料连接技术,通过某种物理化学过程使别离的材料产生原子或者分子间的作用力而连接在一起,随着焊接技术的不断发展,它在生产中的应用日趋广泛,到目前为止已经成为一种重要的加工手段。
铝及铝合金先进焊接技术探索论文
铝及铝合金先进焊接技术探索论文铝及铝合金先进焊接技术探索论文摘要:铝及铝合金广泛应用于工业生产,近些年来,铝及铝合金焊接技术发展迅速,克服了传统的铝及合金焊接的众多弊端。
基于此,本文在概述铝及合金焊接过程中出现问题的基础上,对铝及铝合金先进焊接技术进行了概述,为铝及铝合金工艺的积极开发及高性能铝合金产品的发展提供理论依据。
关键词:铝及铝合金;先进焊接;技术研究一、前言铝及铝合金不仅具有良好的耐腐蚀性,而且导热性和导电性俱佳,为此广泛应用于工业生产,包括汽车制造、航空航天等制造业。
近些年来,我国的铝及铝合金焊接技术发展迅速,出现了新型焊接技术,包括调制脉冲焊接、穿孔离子焊接、激光焊接及摩擦搅拌焊等,这些新兴的焊接技术,显示出极大的技术优势,为自动化焊接提供了理论基础,基于此,本文在概述铝及合金焊接过程中出现问题的基础上,对铝及铝合金先进焊接技术进行了概述,为铝及铝合金工艺的积极开发及高性能铝合金产品的发展提供理论依据。
二、铝及铝合金焊接概述铝及铝合金不仅材质轻,而且强度好,具有良好的耐腐蚀性,因此,在各类焊接结构产品中得到了广泛的应用。
而在工业焊接的过程中,经常会产生气孔、出现裂纹、接头“等强性”等现象,极大了影响到工业生产制造的质量。
首先,焊接过程中产生气孔主要是由氢气导致的,而氢气来源主要来自于各种原因产生的水,避免气孔的主要途径是通过消除熔池吸水来解决的,具体方法包括,焊前的处理,需要焊接材质的干燥,做好焊接前的工件表明杂志的清除工作,确保氩气中含水量低于0.08%;焊接过程中,做好焊接工艺,通过控制熔池高温时间,促进氢的析出,也就是说可采用高温情况下快速焊接,以提高氢的析出。
其次,导致焊接裂纹的原因包括以下两方面,第一,熔池存在脆性温度区间,从液态到冷却凝固的`时间内,存在某一稳定范围,强度和脆性低,容易出现焊接裂缝;第二,较大的焊接膨胀系数,使得熔池冷却的过程中存在较大的拉伸变形,尤其是在脆性温度区间,增强了冷却凝固过程中裂缝出现的几率,为此,可以通过缩短脆性温度区间,提高焊接工艺及填充其他金属元素等方式,防止焊接过程中出现过多的裂纹。