BODE图 画图过程
如何绘制伯德图PPT课件
G( j ) 00
(5-63) (5-64)
100 00
900 1800
10 100 1000
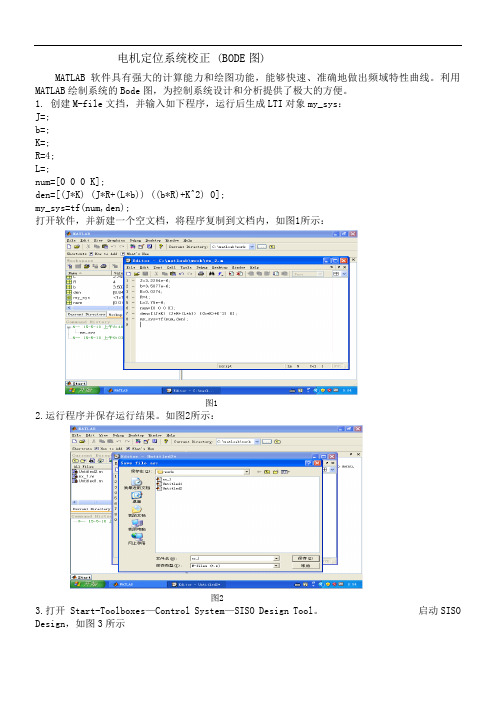
图5-11 放大环节的Bode图
如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G( j) 1 j 1 1 e j90 j
7
当有n个积分环节串联时,即
dB L()
G(
j
)
(
1
j
)n
其对数幅频特性为
20 lg
G(
j )
20 lg
1
பைடு நூலகம்n
40
( 5-70 )
0
(5-71)
0.01 0.1
40 dB / dec
1
10
n 20 lg
G( j ) n 900
(5-72) 度 ()
6
设 ' 10 ,则有
20lg ' 20lg 10 20 20lg
dB L()
可见,其对数幅频特性是一条在
60
(5-68)
ω =1(弧度/秒)处穿过零分贝线 (ω 轴),且以每增加十倍频降 低20分贝的速度(-20dB/dec ) 变化的直线。
40
20dB / dec
1
L() dB
bode图怎么绘制

bode图怎么绘制不过在系统辨识工具箱中有相应的函数能够完成该功能。
应该是invfrqs函数。
但这个是由频率响应得到的,所以你的对输入输出信号做傅里叶变换得到频率响应后在用这个函数拟合传递函数。
使用matlab工具箱更为方便和直观:1. 把u,y信号导入到工作空间里。
2. 用ident命令打开matlab系统辨识工具箱,然后点击import data,从新打开界面里导入工作空间的数据。
然后可以通过图形查看该输入输出信号,或者在proprocess进行信号预处理。
3. 根据你的模型在estimate里选择linear parameter models,个人觉得你应该选择ARX 结构,确定阶数,然后进行估计。
4. 在主界面里查看估计模型,并且可以和实际输出比较,看看拟合度。
详细使用方面参考帮助文档System Identification Toolbox User's Guide也只能是拟合吧,拟合的目标也只能是有限的一些典型传递函数。
做过这个,就是拟合吧在sisotool工具里放置合适的零极点,尽量使曲线吻合,得到传递函数我是大概知道实测的曲线的零极点分布的,然后去拟合的,这样好做点如果已经得到Bode plot,就幅度vs频率,相位vs频率曲线,根据+/-20db/dec,+/-40db/dec 渐近线先预测几个pole,zero,double pole double zero,然后再去近似了。
还有几个比较困难的地方是:1)实际系统引入的杂散参数和群延迟特性,才是拟合和预测的难点。
2)实际测量时仪器已经采用了离散化的数字处理手段,还有测量系统处理误差和测量时注入的扰动幅度所引起的误差,对低频还好,对高频都是很大的影响。
3)所以目前已有的模型,多是对1/2开关频率之前的预测,V2等新模型有所改进,但是还是有其局限性以我测试的为例吧,R=1e3; C=1e-7; L=0.1; Rl=1000;magdb_LCR=zeros(1,1e5);% -sL-R-|(1/sC)mag_LCR=zeros(1,1e5);phase_LCR=zeros(1,1e5);freq=(1:1e5);RCplot=zeros(1,1e5);LCRplot=zeros(1,1e5);for f=1:1:1e5LCR=1/((1i*2*pi*f)^2*L*C+1i*2*pi*f*C*Rl+1);LCRplot(f)=LCR;mag_LCR(f)=abs(LCR);magdb_LCR(f)=20*log10(abs(LCR));phase_LCR(f)=angle(LCR)*180/pi;end我用上方的函数写一个已知的传递函数,生成对应频率下的幅值和相位。
如何绘制伯德图.ppt
j?
??
其幅频特性为
1
G ( j? ) ? ?
对数幅频特性是
(5-65) (5-66)
1
20 lg G ( j? ) ? 20 lg ? ? 20 lg ? ?
(5-67)
当 ? ? 0 . 1 时,20 lg G ( j 0 . 1 ) ? ? 20 lg 0 . 1 ? 20 ( dB ) ; 当 ? ? 1 时,20 lg G ( j1) ? ? 20 lg 1 ? 0 ( dB ) ;
当 ? ? 10 时,20 lg G ( j10 ) ? ? 20 lg 10 ? ? 20 ( dB ) 。
6
设 ? ' ? 10 ? ,则有
? 20 lg ? ' ? ? 20 lg 10 ? ? ? 20 ? 20 lg ?
可见,其对数幅频特性是一条 在
dB L(? )
60
(5-68)
ω =1(弧度/秒)处穿过零分贝线
(5-73) (5-74)
? ? 20 lg 1 ? T 2? 2
当 ? ?? 1 时, 20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? 0 ( dB ) ,
T
当 ? ?? 1 时,20 lg G ( j ? ) ? ? 20 lg 1 ? T 2 ? 2 ? ? 20 lg T ? ( dB )
40
(ω 轴),且以每增加十倍频降
20
? 20 dB / dec
低20分贝的速度( -20dB/dec )
0
0.01
0.1
1
10
?
变化的直线。
? 20
积分环节的相频特性是
? G ( j ? ) ? ? 90 0
如何绘制伯德图
。
6
设 ' 10 ,则有
20 lg 20 lg 10 20 20 lg
'
(5-68)
dB L( )
可见,其对数幅频特性是一条在 ω =1(弧度/秒)处穿过零分贝线 ( ω 轴),且以每增加十倍频降 低 20 分贝的速度( -20dB/dec ) 变化的直线。 积分环节的相频特性是
对数幅频特性为
20 lg G( j ) 20 lg K
(5-61)
当K>1时,20lgK>0,位于横轴上方;
当K=1时,20lgK=0,与横轴重合;
当K<1时,20lgK<0,位于横轴下方。
4
放大环节的对数幅频特性如图5-11所示,它是一条与角频 率ω 无关且平行于横轴的直线,其纵坐 标为20lgK。
0
100
1000
(5-63)
180
0
放大环节的相频特性是
G( j ) 0
0
图5-11 放大环节的Bode图
(5-64) 如图5-11所示,它是一条与角频率ω无关且与ω轴重合的直线。
5
(二)积分环节 积分环节的频率特性是
G ( j ) 1 j j 1
1
e
j 90
2 2 2
(5-85)
相频特性是
G ( j ) arctg 2 1
2 2
dB
40
(5-86)20
0
1 1 10
0
精确特性
40dB / dec
二阶微分环节与振荡节的Bode
1
图关于ω 轴对称,如图5-21 。
第5章4——Bode图
2
1 2 n
2
n
2 arc tg n 2 1 2 n
0 0 ( ) 90 n 180
autocumt@ 22
振荡环节L()
L()dB 40 20 0dB -20
(rad / s)
10 -2
10 -1
1
10
0
2 3 4
10
1
autocumt@
自动控制原理
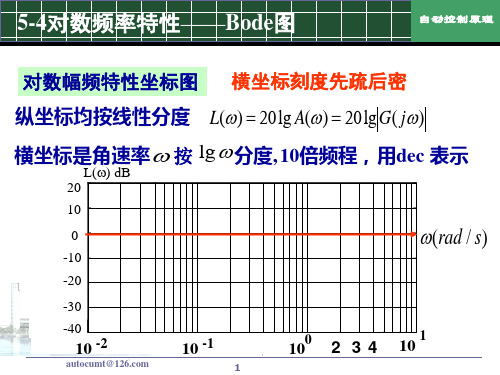
对数分度:
lg 2 0.301
lg 3 0.4771 lg 4 2lg 2 0.602 lg 5 0.699 lg 6 lg 3 lg 2 0.778
lg 7 0.845 lg 8 3 lg 2 0.903 lg 9 2 lg 3 0.954
()º
(rad / s)
10 -2
autocumt@
10 -1
3
100
10
1
20 10 0
自动控制原理
L() dB -10
-20 -30 -40 900 450
( )
00 0 -450 -900
-1350
完 整 图 二 合 一
-1800
10 -2
autocumt@
[-20] 0.1 0.2
1
2
10 20
[-20]
100
16
5-4 对数频率特性——Bode图
(5)一次微分环节
传递函数: G(S) TS+ 1 频率特性: G ( j ) Tj 1
0 0 1 相频特性 ( ) arctanT 45 T 90
bode图画图过程
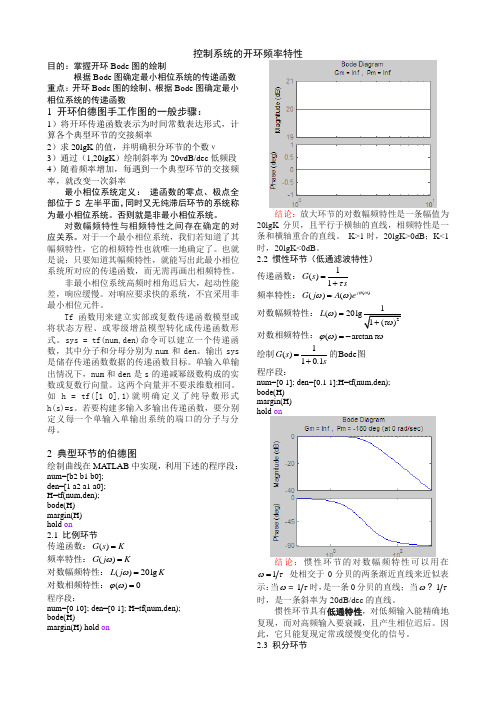
电机定位系统校正 (BODE图)MATLAB软件具有强大的计算能力和绘图功能,能够快速、准确地做出频域特性曲线。
利用MATLAB绘制系统的Bode图,为控制系统设计和分析提供了极大的方便。
1. 创建M-file文挡,并输入如下程序,运行后生成LTI对象my_sys:J=;b=;K=;R=4;L=;num=[0 0 0 K];den=[(J*K) (J*R+(L*b)) ((b*R)+K^2) 0];my_sys=tf(num,den);打开软件,并新建一个空文档,将程序复制到文档内,如图1所示:图12.运行程序并保存运行结果。
如图2所示:图23.打开 Start-Toolboxes—Control System—SISO Design Tool。
启动SISO Design,如图3所示图34. 将my_sys程序导入到SISO Design Tool中,File-Import 如图4所示图45. 在View菜单中,关闭根轨迹显示,只显示开环的Bode图。
如图5所示图56. 加积分环节;加零点(60角频率)将各个参数进行积分:空白处右键—Add Pole/Zero—Integrator。
如图6所示:图67.在magnitude曲线加零点,然后Analysis菜单下Response to Step Command指令。
如图7所示:图78. 在管理反馈界面中,只显示闭环的r与y的关系—LT1 Viewer For SISO Design Tool界面空白处右键—Systems—Closed Loop :r to u (green),如图8所示:图89. 添加零点和极点,如图8所示,并移动极点、零点和线的位置,调整LT1 Viewer For SISO Design Tool窗口中函数图像的变化直到符合Bode图,如图9所示:图 910.用鼠标上下移动观察阶越响应的超调量变化,满足校正要求。
如图10 所示:图1011.从analysis→closed loopbode调用LTI viewer分析闭环BODE图。
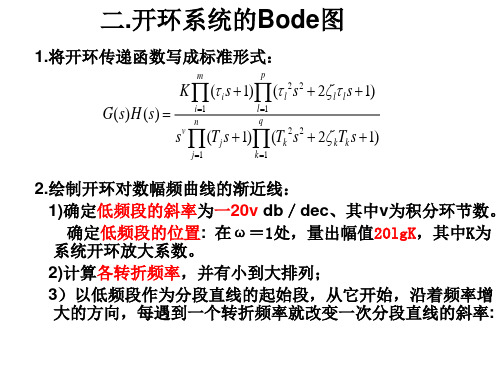
5.3.2开环系统bode图的绘制
5.3.2 开环系统Bode 图的绘制将开环传递函数()G s 表示成式(5-48)形式的典型环节组合形式,有12121212()20lg ()20lg[()()()]20lg ()20lg ()20lg ()()()()()()()()l l l l L A A A A A A A L L L ω=ω=ωωω⎧⎪=ω+ω++ω⎪⎨=ω+ω++ω⎪⎪ϕω=ϕω+ϕω+ϕω⎩ (5-58) 式中,)(ωi L 和)(ωϕi 分别表示各典型环节的对数幅频特性和对数相频特性。
式(5-58)表明,只要能作出)(ωj G 所包含的各典型环节的对数幅频和对数相频曲线,将它们进行代数相加,就可以求得开环系统的Bode 图。
实际上,在熟悉了对数幅频特性的性质后,可以采用更为简捷的办法直接画出开环系统的Bode 图,具体步骤如下。
(1) 将开环传递函数写成尾1标准形式:()211()2211(1)[()21]()(1)[()21]m p pzh i h i zh zh n q v qv pk j k j pk pks s s K z G s s s s s p -==--==+++=+++∏∏∏∏ξωωξωω 确定系统开环增益K 和型别v ,把各典型环节的转折频率由小到大依次标在频率轴上。
(2) 绘制开环对数幅频特性低频段的渐近线。
由于低频段渐近线的频率特性为()v K j ω,所以它就是过点(K lg 20,1)、斜率为20dB/dec v -的直线。
(3) 在低频段渐近线的基础上,沿频率增大的方向每遇到一个转折频率就改变一次斜率,其规律是遇到惯性环节的转折频率,斜率变化20dB/dec -;遇到一阶复合微分环节的转折频率,斜率变化20dB/dec ;遇到二阶复合微分环节的转折频率,斜率变化40dB/dec ;遇到振荡环节的转折频率,斜率变化40dB/dec -;直到所有转折全部进行完毕。
最右端转折频率之后的渐近线斜率应该是20()dB/dec n m --,其中,m n ,分别为)(s G 分母、分子的阶数。
典型环节的Bode图
控制系统的开环频率特性目的:掌握开环Bode图的绘制根据Bode图确定最小相位系统的传递函数重点:开环Bode图的绘制、根据Bode图确定最小相位系统的传递函数1 开环伯德图手工作图的一般步骤:1)将开环传递函数表示为时间常数表达形式,计算各个典型环节的交接频率2)求20lgK的值,并明确积分环节的个数ν3)通过(1,20lgK)绘制斜率为-20vdB/dec低频段4)随着频率增加,每遇到一个典型环节的交接频率,就改变一次斜率最小相位系统定义:递函数的零点、极点全部位于S 左半平面,同时又无纯滞后环节的系统称为最小相位系统。
否则就是非最小相位系统。
对数幅频特性与相频特性之间存在确定的对应关系。
对于一个最小相位系统,我们若知道了其幅频特性,它的相频特性也就唯一地确定了。
也就是说:只要知道其幅频特性,就能写出此最小相位系统所对应的传递函数,而无需再画出相频特性。
非最小相位系统高频时相角迟后大,起动性能差,响应缓慢。
对响应要求快的系统,不宜采用非最小相位元件。
Tf函数用来建立实部或复数传递函数模型或将状态方程、或零级增益模型转化成传递函数形式。
sys = tf(num,den)命令可以建立一个传递函数,其中分子和分母分别为num和den。
输出sys 是储存传递函数数据的传递函数目标。
单输入单输出情况下,num和den是s的递减幂级数构成的实数或复数行向量。
这两个向量并不要求维数相同。
如h = tf([1 0],1)就明确定义了纯导数形式h(s)=s。
若要构建多输入多输出传递函数,要分别定义每一个单输入单输出系统的端口的分子与分母。
2 典型环节的伯德图绘制曲线在MA TLAB中实现,利用下述的程序段:num=[b2 b1 b0];den=[1 a2 a1 a0];H=tf(num,den);bode(H)margin(H)hold on2.1 比例环节传递函数:()G s K=频率特性:()G j Kω=对数幅频特性:()20lgL j Kω=对数相频特性:()0ϕω=程序段:num=[0 10]; den=[0 1]; H=tf(num,den);bode(H)margin(H) holdon结论:放大环节的对数幅频特性是一条幅值为20lgK分贝,且平行于横轴的直线,相频特性是一条和横轴重合的直线。
如何绘制伯德图

2 20 log
A( )
20 log
K
40
K 10
20log K 20log ,
20
当K 1时, 1, L() 0;
20 40
()
1 10 100 K 1
10,L() 20 可见斜率为-20dB/dec 当K 0时, 1, L() 20 log K;
1 10 100
T
2
可见,相角的变化范围从0~180度。
Wednesday, May 29, 2024
17
二阶微分环节的波德图
( )(deg)
180°
1.0
150° 0.7
120° 90°
0.5 0.3 0.2
60° 0.1
30°
0°
L( )(dB)
40dB / Dec
L( ) 20
(dB)
比例环节的bode图
二、典型环节的波德图
⒈ 比例环节:G(s) K, (K 0),G( j) K 幅频特性:A() K;相频特性:() 0
L() / dB
20log K
20log K
20log K
()
180
K 1
K 1 log
0 K 1
对数幅频特性:
0
L() 20lg K 0
0
K 0 log
相频特性:
() K 0
180
Wednesday, May 29, 2024
K 1 K 1 0 K 1
1
积分环节的Bode图
⒉ 积分环节的频率特性:G(s) K
s
频率特性:
G( j )
K
j
K
K
e2
BODE图的讲解(共22张)
1 0.1 ② 2 1
3 5
2
③ 基准线:
1, 20lg 0.032 30dB
斜率 - 20 v 20dB / dec
第14页,共22页。
例1 根据Bode图确定(quèdìng)系统传递函数。
解. 依图有 G(s) K
() G arctan 1 arctan m 90v arctan T1 arctan Tn-v
第10页,共22页。
绘制开环系统Bode图的步骤
⑴ 化G(j)为尾1标准型
⑵ 顺序列出转折频率
例1
G(s)
40(s 0.5) s(s 0.2)( s2 s 1)
100( s 1)
/T 第7页,共22页。
⑹ 振荡(zhèndàng)G环(节s)
n2
s2 2ns n2
G(
j )
1
2 n2
1
j2
n
L( ) 20lg
[1
2 n2
]2
[2
n
]2
( )
arctan 2
n
1 -
2
2 n
1
n
1
n
L() 0
() 0
L( ) 40lg n
() 180
第8页,共22页。
第15页,共22页。
例5 已知 L(),写出G(s),绘制 , G(j)。
解⑴
K( s 1)
G(s) 1
s( s 1)
2
20 log c 20 log 0
2
1
0
1c 2
k1
0
1c 2
⑵ 叠加作图如右
⑶ G( j )
G( j0) 90
5_2 Bode绘制步骤
的 Φ(ω)曲线 G ( s ) H ( s ) s ( s 1)( s 20)
100( s 2)
10(0.5 s 1) s ( s 1)(0.05 s 1)
(-20 ) 90 arctg arctg 0.5 arctg 0.05
0
-40
例绘制
G (s)H (s)
100( s 2) s ( s 1)( s 20)
的Bode图
10 (0.5 ) 1
2
解1. 开环传递函数标准化:(图板书)
G (s)H (s)
10(0.5 s 1) s ( s 1)(0.05 s 1)
G ( j ) H ( j )
二.开环系统的Bode图
1.将开环传递函数写成标准形式:
G (s)H (s) K ( i s 1) ( l s 2 l l s 1)
2 2 m p i 1 n l 1 q
s
v
(T j s 1) (Tk s 2 k Tk s 1)
2 2 j 1 k 1
10
3
Bode Diagram 100
50
Magnitude (dB)
c
0
-50
-100 -90
( c )
Phase (deg)
-135
-180 10
-2
10
-1
10
0
10 Frequency (rad/sec)
1
10
2
10
3
c 5
( c ) 114.5 0
1 1 : 惯 性 环 节
1 s 1
斜 率 改 变 [-20]
自动控制理频域伯德图

Lω 20lg1 =0 dB
——低频渐近线为一条0dB的水平直线。
Lω 20lg 1 Tn ω
2
2 2
2ζ T ω
n
2
高频段,即ωTn>>1时
L() 20lg( Tn ) 40lg(Tn )
2 2
当ω增加10倍
ωTn 40 40lgωTn L() 40lg10
相频与ω无关,值为-90°且平行于横轴的直线。
L ( )
20 0
20 0.1 10
1
( )
0 90
0.1
1
10
3 微分因子
G jω jω
微分环节是积分环节的倒数,它们的 曲线斜率和相位移也正好相差一个负号。
L ( )
20
0
20
0.1 20
1
10
( )
90
L() 40lg Tn 40lg1 0(dB)
即高频渐近线是一条斜率为-40dB/dec的直线。 当 ωω 1 时
n
Tn
说明
ω ωn
1 Tn
为二阶系统(振荡环节)的转折频率。
。10
0
0.1
0.2 0. 3
L ( )
dB
-40dB/dec
0 .7 1
10
系统 的相频特性为 90 arctan arctan 2 10
0
W=0
90
0
W=1
W=10 W=无穷大
110.860
123.70
0 90
控制器之设计 利用Bode plot 波德图设计控制器之步骤
• 其轉移函數可表示成
Vi
+ - K(s)
Vo
Gp(s)
H (s)
M (s) G(s) 1 G(s)H (s)
• 其特徵方程式 (s) 1 G(s)H(s) 0 • G(s)H(s) 稱為開迴路增益(open loop) • 波德圖設計 根基於開迴路增益
對應增益交越頻率。相位邊限 22.68 增益交越頻率 868 rad/sec • Step 3:計算出需增加多少相位邊限,並求
出此相位邊限之頻率 。 wg' • Step 4:將此相位邊限之頻率 wg' 代回原波
德圖,計算出提供多少增益
PI空制器器需提供 21.5dB
設計步驟為
• Step 5;將Step 4求出之增益代入控制器以
波德圖設計控制器之步驟
• step 1:劃出原有未補償之波德圖。 • Step 2:找出該波德圖之相位邊限,及其相對應
增益交越頻率 • Step 3:計算出需增加多少相位邊限,並求出此
相位邊限之頻率。 • Step 4:將此相位邊限之頻率代回原波德圖,計
算出提供多少增益。 • Step 5;將Step 4求出之增益代入控制器以求得
求出 K P
K P 10 G( jห้องสมุดไป่ตู้g/ ) dB / 20 0.084
•
Step 6:將Step 5求出之
代入 K P
KP KI
關
係式求出 KI
KI
w
' g
K
P
10
1.36
模擬結果:未加控制器
模擬結果:加控制器
相關之增益值及相位。進一步求出相關變數。
bode图 nyquist图
系统开环Nyquist图的绘制
例1 已知系统的开环传递函数如下,试绘制系统的 开环Nyquist图。
举例说明
系统开环Nyquist图的绘制
举例说明
例2 已知系统的开环传递函数如下,试绘制系统的 开环Nyquist图,并求与实轴的交点。
Nyquist图与实轴相交时
系统开环Nyquist图的绘制
延迟环节 是不是 最小相位环节 ?
系统开环Bode图的绘制
Bode图的绘制举例
系统开环Bode图的绘制
单回路开环系统Bode图的绘制
系统开环Nyquist图的绘制
概述
K ( n s 1) ( k s 2 k k s 1)
2 2
G( s) s
v
n 1
k 1
举例说明
例3 已知系统的开环传递函数如下,试绘制系统的 开环Nyquist图。
系统开环Nyquist图的绘制
总结
0型系统(v = 0)
G ( j ) K (1 j 1 )(1 j 2 )...(1 j m ) ( j ) (1 jT1 )(1 jT2 )...(1 jTn )
n m
0
A(0) K
只包含惯性环节的0型系统Nyquist图
( 0) 0
A( ) 0
( ) ( n m ) 90
系统开环Nyquist图的绘制
总结
I型系统(v = 1)
G ( j ) K (1 j 1 )(1 j 2 )...(1 j m ) ( j ) (1 jT1 )(1 jT2 )...(1 jTn )