Kinematical structure of the circumstellar environments of galactic B[e]-type stars
一种体内构建组织工程软骨的方法
一种体内构建组织工程软骨的方法1.组织工程学是一门研究如何在体内构建组织和器官的学科。
Tissue engineering is a discipline that studies how to build tissues and organs in the body.2.目前,体内构建软骨组织的方法已经取得了一定的进展。
Currently, there has been some progress in the methods of building cartilage tissue in the body.3.软骨是一种结缔组织,具有一定的韧性和弹性。
Cartilage is a type of connective tissue that has a certain toughness and elasticity.4.在体内构建软骨组织需要考虑细胞、生物材料和生物力学等因素。
Building cartilage tissue in the body requires consideration of factors such as cells, biomaterials, and biomechanics.5.一种常见的体内构建软骨组织的方法是通过干细胞移植。
A common method for building cartilage tissue in the body is through stem cell transplantation.6.干细胞具有多能性,可以分化成不同类型的细胞,如软骨细胞。
Stem cells have pluripotency and can differentiate into different types of cells, such as chondrocytes.7.干细胞移植需要将干细胞注入到受损的软骨组织中,促进软骨再生。
Stem cell transplantation involves injecting stem cells into damaged cartilage tissue to promote cartilage regeneration.8.另一种体内构建软骨组织的方法是通过生物材料支架的植入。
Investigation of crystal growth kinetics
Investigation of crystal growthkineticsIntroductionCrystal growth is a process that involves the formation of crystal structures from a homogeneous solution or melt. The study of crystal growth kinetics is important in terms of understanding the fundamental principles underlying the processes of nucleation and crystal growth, as well as in the development and optimization of crystal growth techniques and the design of new materials.NucleationNucleation is the initial stage in crystal growth that involves the formation of small clusters or nuclei of the crystal phase in the supersaturated solution or melt. The rate of nucleation is dependent on several factors including temperature, concentration, degree of supersaturation, and the presence of seed crystals.The classical theory of nucleation postulates that the free energy required for the formation of a nucleus is proportional to the volume of the nucleus raised to the power of 2/3. This implies that the formation of larger nuclei requires much higher free energy, which in turn leads to a decrease in the rate of nucleation. Changing the crystallization conditions can affect the kinetics of nucleation, and a detailed understanding of this process is essential for controlling the formation of crystals with specific properties.Crystal GrowthOnce nuclei are formed, crystal growth proceeds through the addition of atoms or molecules to the growing crystal surface. The rate of crystal growth is dependent on the concentration of solute in the solution, temperature, and other factors such as agitation or the presence of impurities.Crystal growth can either be diffusion-controlled or surface-controlled. In diffusion-controlled growth, the rate of crystal growth is limited by the rate of diffusion of solute to the growing surface. Surface-controlled growth, on the other hand, is limited by the rate of attachment or detachment of solute molecules at the crystal surface.Crystal Growth KineticsThe kinetics of crystal growth can be described by several models, including the Avrami equation, the Ostwald–de Waele model, and the Lifshitz–Slyozov–Wagner model. These models are based on assumptions about the mechanisms of crystal growth and have different mathematical forms.The Avrami equation is one of the most widely used models for describing the kinetics of crystal growth. It is based on the assumption that the growth of crystals is a random process, and the rate of growth of a crystal is proportional to the number of crystals present in the solution or melt.The Ostwald–de Waele model assumes that crystal growth is a power-law process, and the relationship between the growth rate and the concentration of solute in the solution follows a power law. This model is particularly useful for describing the kinetics of crystal growth in systems where diffusion is the rate-limiting step.The Lifshitz–Slyozov–Wagner model is based on the assumption that crystal growth occurs through the coalescence of smaller crystals into larger ones. This model is useful for understanding the mechanisms underlying the formation of large single crystals from a solution or melt.ConclusionIn conclusion, the study of crystal growth kinetics is an important area of research that is essential for the development of new materials and the optimization of crystal growth techniques. The kinetics of nucleation and crystal growth are dependent on several factors such as temperature, concentration, and the presence of impurities, and can be described by several mathematical models. A detailed understanding of thekinetics of crystal growth is essential for controlling the formation of crystals with specific properties and for the design of new materials with novel properties.。
光合作用中细胞各部分结构的联系
英文回答:The process of photosynthesis involves the intricate coordination of various cellular structures within plant cells. These structures epass the chloroplasts, thylakoid membranes, stroma, and grana. The chloroplasts, serving as the primary organelles for photosynthesis, consist of thylakoid membranes that amodate the photosystems responsible for capturing light energy, while the stroma hosts the enzymes essential for the Calvin cycle, the secondary phase of photosynthesis. Moreover, the grana,prised of stacked thylakoid membranes, play a pivotal role in facilitating the light-dependent reactions of photosynthesis.光合作用的过程涉及植物细胞内各种细胞结构的复杂协调。
这些结构通过氯仿、Thylakoid膜、石膏和颗粒。
作为光合作用的主要管子的氯聚变器由热液膜组成,该膜对负责捕捉光能的光系统产生摩擦作用,而斯特罗玛则拥有对卡尔文循环至关重要的酶,即光合作用二级。
由叠叠的Thylakoid膜制成的颗粒在促进光合作用依赖光的反应方面发挥着关键作用。
The chloroplasts have this double layer of membranes that kind of act like bodyguards for all the photosynthesis stuff inside.Inside these membranes, there are these stacks called grana where the light-dependent reactions happen. These stacks are packed with these green pigments called chlorophyll that suck up all the light energy and kick off the whole photosynthesis process. Then there's this fluid-filled space outside the stacks called the stroma, where the Calvin cycle happens. This is where the carbon dioxide gets turned into glucose with the help of enzymes and ATP that's made during the light-dependent reactions.氯仿机有一层双层膜里面所有光合作用的东西都像保镖一样在这些膜内部,有这些被称为grana的堆积物,在那里发生依赖光的反应。
Kink Casimir energy in a lattice sine-Gordon model Phys

J M Speight Department of Mathematical Sciences, University of Durham, Durham DH1 3LE
The Casimir energy of quantum uctuations about the classical kink con guration is computed numerically in the weak coupling approximation for a recently proposed lattice sineGordon model. This energy depends periodically on the kink position and is found to be approximately sinusoidal. PACS classi cation numbers: 03.65.Sq, 11.10.Lm, 63.10.+a.
2 h X 2 sin ( ? j ) ? m sin 2 ( j+1 + j ) 4 j h 2 j+1 X = V + 2m2 (cos j+1 ? cos j ) j m )V 2
0
(4)
when kink boundary conditions are imposed. This (the Bogomol'nyi) bound is saturated if and only if sin 2 ( j+1 ? j ) = hm 2 ( j+1 + j ): (5)
Creep behavior of austenitic stainless steel weld metals as a function of ferrite content

Materials Science and Engineering A452–453 (2007) 284–291Creep behavior of austenitic stainless steel weldmetals as a function of ferrite contentY.Cui∗,Carl D.LundinDepartment of Materials Science and Engineering,The University of Tennessee,Knoxville,TN37996-2200,USAReceived26July2005;received in revised form17October2006;accepted18October2006AbstractFour types of modified and commercial E308H and E316H weld deposits with Ferrite Number(FN)in the range of0–5.7were investigated for creep behavior at stress levels between70and240MPa,with a range of temperature550–700◦C.After creep testing,sigma phase was found in commercial E308H and E316H creep samples,significant carbide evolution from modified E308H and E316H with0FN creep samples distribute in a random and a chain along the substructures and grain boundaries,respectively.The creep results show that,for E316H weld deposits,modified samples with0FN,even though containing microfissures,have a higher creep strength than thefissure-free commercial samples with a higher ferrite content.This can be attributed to the beneficial effect from the carbides on dislocation barriers and the detrimental effect on hard and brittle sigma formed in commercial E316H.Fissure-containing modified E308H has a lower creep strength thanfissure-free commercial sample because of the propagation paths provided byfissures and the minimal effect on the randomly distributed carbides.© 2006 Elsevier B.V. All rights reserved.Keywords:Welding;Creep;Austenitic stainless steel;Ferrite Number;Dislocation1.IntroductionAustenitic stainless steels constitute the largest stainless fam-ily in terms of alloy type and are used in various corrosive conditions over the temperatures ranging from cryogenic to elevated[1].They are generally regarded as readily weldable materials without the risk of cracking and with considerable tolerance for variations in welding conditions.However,fully austenitic weld deposits may contain microfissures in single pass welds and in underlying weld runs reheated by subsequent passes in multipass welds.The occurrence of the microfissures can be the cause of weld rejection and may induce of prop-erty degradation of the weld metal.Hot cracking in austenitic stainless steel welds has been extensively discussed in the lit-erature,and a universal agreement,on liquidation mechanisms, have been reached among investigators[2–10].Carl D.Lundin summarized the characteristics of microfissuring in his series of articles discussing microfissure investigations.Microfissures occur primarily in ferrite-free areas along grain boundaries in the HAZ of the previous deposited weld pass.The microfis-∗Corresponding author.Tel.:+18659745299;fax:+18659740880.E-mail address:ycui1@(Y.Cui).suring tendency is enhanced by multiple thermal cycling in the HAZ[11].In addition,a low ductility region already exists in the weld metal of previously deposited weld beads from multi-pass or repair welding.This region is usually the initial location for microfissuring occurrence when the weld with a low ferrite content,under a high imposed strain that exceeds the strain tol-erance of the microstructure[9].Delta ferrite is usually required at a certain level for its beneficial effect in reducing or preventing microfissuring in austenitic stainless steel weldments[12].This level of ferrite was morefirmly established by Lundin et al.in an article documenting the ferrite-fissuring tendency of austenitic stainless steel weld metals[13].Because the microfissures are very small and not detectable at lower magnification,the Fissur-ing Bend Test method is often used to evaluate the microfissuring tendency in multipass weldments due to its favorable features most desired in a weldability test[18].Several of constitution diagrams and models have been developed to accurately predict the ferrite content in stainless steel welds[14–17].Electrode manufacturers as well as consumers often use Ferrite Number,a measure of the ferrite content,as an alloy specification in order to ensure that weldments contain a desired minimum(or maxi-mum)ferrite level.Ferrite in the austenitic stainless steel weld plays a dual role.On the one hand,it reduces the susceptibility of the weld to hot cracking and on the other hand it affects the0921-5093/$–see front matter© 2006 Elsevier B.V. All rights reserved. doi:10.1016/j.msea.2006.10.132Y.Cui,C.D.Lundin/Materials Science and Engineering A 452–453 (2007) 284–291285creep properties for long-term service at elevated temperatures. Microfissures can be controlled to a certain extent by attention to consumable composition and purity,and welding technique, but they cannot be uniquely eradicated in real weld application because ferrite distribution is not uniform.Thus,Ferrite Num-ber and microfissures or cracks in austenitic materials generally cause the most alarm when the weldment properties are being considered such as strength,toughness,corrosion resistance and long-term service at elevated temperatures.The purpose of this study was to evaluate the creep behavior of austenitic stainless steel weld metals with and without ferrite content(fissure-free andfissure-containing).2.Experimental procedures2.1.Materials evaluationFour different weld electrodes(3.2mm diameter),com-mercial and modified E308H and E316H,were used in this investigation.Modified electrodes are those electrodes that were especially produced by adjusting the ratio of Chromium-equivalent and Nickel-equivalent in order to obtain a ferrite-free microstructure and produce microfissures.The deposit chemical compositions still meet the AWS A5.4specification,as shown in Table1.The base metal used is304stainless steel cut from bar stock.Three-layer weld pads(six beads to each layer)were pro-duced using Shielded Metal Arc(SMA)welding to permit the evaluation of microfissuring in relatively undiluted weld metal. Before welding,plates were clamped on each end to a heavy backingfixture to prevent excessive deformation during weld-ing.The deposited three-layer pad is approximately6.4mm thick,25.4mm wide and203mm long with the configuration as shown in Fig.1.The welding parameters are shown in Table2. With the pads still in the clampingfixture,the surface was milled using a0.254mm depth of cut on each pass until the surface was clear of irregularities.The pad surface was ground on a surface grinder using a12pass sequence with thefirst8passes each removing0.025mm and thefinal4passes each removing 0.013mm.After grinding,the specimens were removed from the clampingfixture and ultrasonically washed in methanol to remove all traces of cuttingfluids for Ferrite Number measure-ment and Fissure Bend Testing.The Ferrite Number was determined in the center100mm region of the ground pad,using a15intersection grid layout, with the Feritscope,as shown in Fig.2.The average Ferrite Number of commercial E316H and E308H,modified E316H and E308H are4.7,5.7,0and0,respectively.Fig.1.Schematic drawing of(a)the clampingfixture and(b)the pad configu-ration.Table2Welding parametersCurrent(A)95V oltage(V)23Travel speed(mm/min)203Number of layers3Interpass temperature(◦C)94Heat Input(kJ/mm)0.7Fig.2.Schematic diagram for Ferrite Number determination.Table1Chemical composition of weld depositsC Mn Si P S Cr Ni Mo Al Ti Co V Cu Nb N C308H0.048 1.680.490.0290.00819.789.490.160.010.010.130.0860.230.010.82 M308H0.074 1.170.410.0340.01118.3910.510.170.0040.010.0300.0800.240.010.12 C316H0.065 1.700.400.0250.00719.1011.90 2.30––––0.200.010.03 M316H0.065 1.230.430.0380.01117.4013.47 2.22––––0.150.010.13286Y.Cui,C.D.Lundin /Materials Science and EngineeringA 452–453 (2007) 284–291Fig.3.Weldment preparation and schematic drawing of creep sample.The bend fixture was used to perform the Fissure Bend Test on weld coupons to determine the microfissure distribution.The milled and surface ground weld pads were bent in tension to an angle of 120◦for detecting the microfissures present across the center 100mm of the pad surface for evaluation of microfissur-ing tendency.The number of microfissures was counted under the microscope at 100magnification.An average microfissure density of 7.9and 5.9cm −2was determined for modified E308H and E316H pads,meanwhile no microfissures were present in the commercial E308H and E316H weld pads.2.2.Creep property evaluation2.2.1.Sample preparationBefore welding,the plates were clamped on each side to a heavy backing fixture to prevent excessive distortion.All weld-ing was accomplished with the same welding conditions as those for the electrode evaluation.Fig.3shows the groove joint prepa-ration,the application of two butter layers and the sequence of the joint.All weld-metal test specimens for creep testing were extracted along the longitudinal direction from the coupon.2.2.2.Creep testingThe creep testing was conducted in constant load creep frames.Each frame contains a three-zone furnace with the power level for each zone being independently adjustable.Each furnace is controlled by a Leeds and Northrup Electromax III controller which utilizes a chromel–alumel thermocouple to monitor the temperature at the center of the middle zone.Each specimen is mounted in a testing fixture and suspended within the creep frame furnace.A chromel–alumel thermocouple wired to the center of the specimen gauge length is connected to a digi-tal temperature recorder which,in turn,is used to monitor the temperature of the specimen during testing.To minimize the convection of air through the furnace,both the top and bottomorifices of the furnace were packed with ceramic wool.At the beginning of each test,the specimens are heated to the desired temperature and stabilized before any load is applied.Loading is in uniaxial tension with a constant load throughout the test.In addition to temperature,specimen extension,measured by a dial gauge attached to the testing fixture,is also recorded as a function of time.Different stress levels between 70and 240MPa were used together with a range of temperature (550–700◦C)for creep testing of commercial and modified E308H and E316H weld deposits.3.Results and discussion 3.1.Creep testing resultsFig.4illustrates typical creep curves (strain versus time to rupture)for fissure-containing and fissure-free E316HsamplesFig.4.Typical creep curves (strain vs.time to rupture)for fissure-containing and fissure-free 316H samples under the same testing condition,117MPa and 660◦C.Y.Cui,C.D.Lundin/Materials Science and Engineering A 452–453 (2007) 284–291287Fig.5.(a).Creep-rupture behavior for E308H welds;(b)creep-rupture behavior for E316H welds;(c)creep-rupture behavior for commercial E308H and E316H.under the same testing conditions,117MPa and660◦C.Both curves match well up to1700h,then thefissure-containing spec-imen exhibits more secondary creep.The creep rate increases rapidly in the tertiary region that starts at approximately2% creep strain in both specimens.However,the time to rupture for fissure-containing modified316H is1000h greater than com-mercial316Hfissure-free sample.The analysis of creep test results was conducted using the Larson–Miller Parameter technique as shown in Fig.5(stress level versus LMP).It is apparent that the creep properties of modified E316H(microfissure-containing)are superior to the commercial E316H(microfissure-free)samples;meanwhile modified E308H(fissure-containing)sample shows lower creep properties than commercial E308H(fissure-free)sample.3.2.Metallurgical evaluationSamples for microstructure evaluation were extracted from fractured creep specimens and ground and polished to0.05m surfacefinish and electrolytically etched with potassium hydrox-ide to reveal the morphology of the microstructure.The etchant selection is considered to be sensitive in revealing sigma phase (colored)in austenitic stainless steel weld metals which have experienced long-term service at elevated temperature.The most successful etchant for revealing sigma phase is an electrolytic etchant containing potassium hydroxide(KOH–H2O)solution under a controlled(DC)current density and the etchant time.The solution preferentially etches sigma(relative to the austenitic grain boundaries)the color of which varies from yellow to reddish-brown under the optical microscope.Such characteristic colors and contrast made sigma phase identification[19].Fig.6shows the microstructural morphologies of modified 308H samples before and after creep testing.Before and after creep testing,the microstructure of modified308H is austenite (FN=0),as shown in Fig.6(a).For commercial308H,the as-deposited microstructures are austenite with ferrite,austenite with ferrite and sigma after creep testing as shown in Fig.6(b).Fig.6(c)shows the microstructure of modified316H.Before creep testing,the microstructure is all austenite(FN=0).Dur-ing testing,carbides evolved in the vicinity of the substructure and grain boundaries.For commercial316H(FN=4.7),the microstructure is austenite with ferrite before creep testing and austenite with ferrite and sigma(deduced from morphology and color etching)after creep testing,as shown in Fig.6(d).288Y.Cui,C.D.Lundin /Materials Science and EngineeringA 452–453 (2007) 284–291Fig.6.Microstructure of samples before and after creep testing.(a)Modified E308H (138MPa,620◦C,746h);(b)commercial E308H (138MPa,645◦C,754h);(c)modified E316H (117MPa,660◦C,3671h);(d)commercial E316H (117MPa,660◦C,2685h).The sigma phase is distributed along the substructure and grain boundaries and shows reddish-brown under the microscope.SEM microstructural morphology of commercial and modi-fied E316H samples after creep testing is presented in Fig.7as a back scattered image.The typical microstructure includes the coarse irregular-shaped secondary phase like the “islands”in the matrix in Fig.7(a)and the dark globular particles in Fig.7(b).The majority of the globular particles form,in modified E316H,along the substructure and grain boundaries and exhibit a size in the range of 0.2–0.4m while the size of the particles within the matrix is around 0.6m.EDS analysis was performed at location A for the irregular-shaped secondary phase and location B for matrix.The EDS spectra presented in Fig.8for locations A and B,respectively.The EDS results show that the irregular-shaped secondary phase contains higher Cr as compared to the matrix.In addition,the fact that these irregular-shaped secondary phasesY.Cui,C.D.Lundin /Materials Science and Engineering A 452–453 (2007) 284–291289Fig.7.SEM microstructural morphology of creep samples after testing (117MPa,660◦C),as a back scattered image (a)commercial E316H (2686h);(b)modified E316H (3671h).were stained red by potassium hydroxide etching,indicates that these are phase.Aluminum oxide presented shown in Fig.8(a)(Al and O peaks)was involved from the polishing process with alumina powder.This can be deduced from the chemicalcom-Fig.8.The EDS spectra for locations A (a)and B (b)in Fig.7(a).position (less aluminum content)and further proved by the latter X-ray diffraction pattern (no aluminum peak appears again).The EDS spectra for particles and matrix for modified E316H do not indicate large difference in chemical composition because it is hard to isolate the small particles from the matrix using EDS.3.3.X-ray diffractionTo further verify the presence of sigma phase and precipita-tion,an X-ray diffraction apparatus was employed to carry out the analysis.An electrolytic precipitate exaction technique was used to obtain the precipitates from commercial and modified E308H and E316H samples before and after creep testing.To extract particles,a known weight of a sample was placed into 10%HCl +90%methanol solution with a constant voltage of 8V referred to the platinum electrode.A centrifuge was used to separate the particles from the solution.The particles collected from the solution were cleaned using high purity methanol.Then the particles were ready for X-ray diffraction.The par-ticles extracted are weighed again and the ratio of the weight percentage of the precipitate to the matrix is obtained from the following formula [20].The results of electrolytic extraction of particles from weld deposits are shown in Table 3.R = M r(M i f )×100,where M i is the initial mass of sample,M f the final mass of sample after extraction and cleaning,M r the mass of residue and R is the residue,mass %.The X-ray diffraction (XRD)spectra were obtained in a Philips X’pert Pro Diffractometer at 45kV and 40mA.Diffrac-290Y.Cui,C.D.Lundin /Materials Science and Engineering A 452–453 (2007) 284–291Table 3Results of electrolytic extraction of particles from weld deposits Material M i (g)M f (g)M r (g)R (%)M316H bf 10.1990 5.47980.01140.242M316H af 0.57600.11140.0050 1.076C316H bf 19.946713.41840.03830.587C316H af 2.10040.27890.0360 1.976M308H bf 3.7304 2.37090.00400.294M308H af 1.96110.13190.0200 1.093C308H bf 4.7813 1.33510.00270.078C308H af1.88590.16950.00930.542tion patterns are acquired from samples in a step mode with 0.02◦step (2θ)and 4s per point over diffraction angles from 30◦to 60◦.The information from X-ray examination was recorded in the form of intensity as function of 2θ.It is evident that Cr 23C 6is the dominant precipitate with a few MnS inclusions for both commercial and modified 308H and 316H before creep testing.After creep testing most particles are Cr 23C 6and an amount of -FeCr was observed in the commercial 316H sample.This agrees with the metallographic examination on this sample.The majority particles for modified and commercial 308H as well as modified 316H are Cr 23C 6.No -FeCr was found in commer-cial E308H samples due to an insufficient amount particles to be detected using X-ray diffraction.The typical X-ray spectra of modified and commercial 316H after creep testing are shown in Fig.9.Fig.9.Typical X-ray diffraction patterns obtained from modified and commer-cial E316H weld deposits after creep testing.3.4.Mechanism analysisAccording to the results on particles extracted from weld deposits of modified E308H and E316H (FN =0),the ratio of extracted particle weight (the ratio of the particle weight to the weight dissolved in electrolytic precipitate extraction)for these two deposits pre-and post-creep testing are in the same level,around 0.2and 1%,respectively.The precipitate ratio after creep testing is much greater than that before,which means that a sig-nificant of carbides evolved after creep testing.The carbides in modified E316H are distributed in chains and those in modi-fied E308H are distributed at random.For commercial E308H and E316H,the extraction ratios are quite different.Because of molybdenum added in E316H,more carbides formed in weld deposits for E316H than E308H before creep testing.After creep testing,more sigma phase formed in E316H than E308H which results in the large difference in extraction ratio for both of these commercial weld deposits.It is to be noted that microfissures decrease creep resis-tance for E308H because of the propagation paths provided by fissures and the reduced benefit effect of the randomly dis-tributed carbides.However,for commercial E316H,sigma phase formed along the grain boundaries due to the higher ferrite and Mo content (the extent of sigmatizion is greater than for commercial 308H).Since the sigma phase is hard and brittle it promotes secondary cracking between the sigma phase and austenite in the matrix under the stress.For modified E316H (fissure-containing),carbides are distributed in a chain of dis-crete globular M 23C 6at the substructure and grain boundaries.This morphology benefits creep-rupture life.The mechanisms causing creep are complex and not fully understood,but dislocation climb is thought to be important.To observe the morphology related to carbides and disloca-tion,a Hitachi 800H type transmission electron microscope was employed.The sample for TEM evaluation extracted from the transverse section of modified E316H sample after creep test,at 45◦along the loading axis.The chemical thinning was per-formed by using a type Tenupo-3dual electrolytic polishing equipment with a solution of 5%perchloric acid in methanol.Fig.10shows the typical TEM microstructural morphology of modified E316H after creep testing under 70MPa,700◦C and 4560h.From the metallurgraphy evaluation and particle extraction ratio,the concentration of the evolved carbides in the modified E316creep sample is high.At such high con-centrations,the precipitates may interact with the dislocation cooperatively rather than individually.Dislocations are multi-plied and locked by the fine precipitate formed in austenite.It is evident that bonding of dislocation to the precipitates will be much stronger than it would be to an “atmosphere”.The precip-itates nucleated at dislocations most effectively retard slip.With increasing plastic deformation,the intersection of dislocations with each other grows to form a network as a forest of disloca-tions.Because of the particles in the forest,any slip dislocation does not travel far before it intersects other dislocations passing through its slip plane at various angles.The particles make the movement of the entangled dislocations through the lattice more difficult.When part of the dislocation in the forest is locked,it isY.Cui,C.D.Lundin/Materials Science and Engineering A 452–453 (2007) 284–291291Fig.10.Typical TEM microstructural morphology of modified E316H after creep testing under70MPa,700◦C and4560h.hard to move entire network.This results in the density of dislo-cations on one side of a particle wall higher than the other side. It is not quite understood that why carbides distributed in a chain of discrete globular precipitates in the E316H weld metal,but in a random order in E308H weld deposits when both FNs are pared to the effect of microfissures and sigma phase in E316H and E308H weld deposits,it is concluded that secondary cracking caused by sigma phase is a main factor in effecting creep properties for E316H deposits,and the microfissures to E308H deposits.4.Conclusions1.The creep test results revealed that modified E316H with0FN(fissure-containing deposits)have superior creep resistance, followed by commercial E316H and E308H,the modified 308H with0FN(fissure-containing)samples showed the poorest performance.2.M23C6carbides evolved from modified E308H and E316Hweld coupons after creep testing when their Ferrite Numbers are0in as-welded samples.The majority of the carbides in modified316H(FN=0)in the range of0.2–0.4m dis-tributed in a chain of discrete globular M23C6along the substructure and grain boundaries while the carbides in mod-ified E308H weld coupons(FN=0)are distributed in a random order.3.Sigma phase can be detected in commercial E316H andE308H samples after the creep tests.More sigma phaseformed in commercial E316H weld deposits than commercial E308H because of the difference in molybdenum content.4.Carbides evolved in a chain effectively retard the movementof dislocation which results in the higher creep properties of modified E316Hfissure-containing sample thanfissure-free.Fissure-containing modified E308H has a lower creep strength thanfissure-free commercial sample because of the propagation paths provided byfissures and the reduced effect on the randomly distributed carbides.5.Creep strength of austenitic stainless weld metals is as a func-tion of ferrite:secondary cracking caused by sigma phase (high ferrite content)is a main factor in effecting creep prop-erties for E316H deposits,and the microfissures to E308H deposits(low ferrite content).AcknowledgementsThe author acknowledges thefinancial support from the Welding Research Council.The authors are grateful to Dr.D.J. Kotecki(The Lincoln Electric Co.)and Mr.Frank Lake(ESAB) for supplying the electrodes.References[1]J.R.Davis,Stainless Steels,ASM Specialty Handbook,ASM International,1996.[2]J.C.Borland,R.N.Younger,Br.Weld.J.8(1960)22–59.[3]R.G.Bake,Br.Weld.J.15(1968)283–295.[4]R.G.Baker,R.P.Newman,Met.Construct.Br.Weld.J.1(1969)1–4.[5]A.M.Rirrer,W.F.Savage,Metall.Trans.A17A(1986)727–737.[6]H.Thielsch,Weld.Eng.52(1967)80–85.[7]T.G.Gooch,J.Honeycomb,Met.Construct.9(1970)375–380.[8]C.D.Lundin,D.F.Spond,Weld.J.55(1976)356s–366s.[9]C.D.Lundin,Weld.J.8(1980)226s–232s.[10]R.Nakkalil,N.L.Richards,M.C.Chaturvedi,Metall.Trans.A24A(1993)1169–1179.[11]C.D.Lundin,C.P.D.Chou,Weld.J.64(1985)113s–118s.[12]F.C.Hull,Weld.J.46(1967)339s–409s.[13]C.D.Lundin,W.T.DeLong,D.F.Spond,Weld.J.54(1975)241s–246s.[14]A.L.Schaeffler,Met.Prog.56(1949)680–680B.[15]W.T.DeLog,Weld.J.53(1974)273s–286s.[16]D.J.Kotecki,T.A.Siewert,Weld.J.71(1992)171s–178s.[17]J.M.Vitek,S.A.David,C.R.Hinman,Weld.J.82(2003)10s–17s,and43s–50s.[18]C.D.Lundin,W.T.DeLong,D.F.Spond,Weld.J.55(1976)145s–151s.[19]L.Patel,The effect of carbon on the formation of sigma phase inaustenitic stainless steel,Master Thesis,The University of Tennessee,1981, p.81.[20]ASTM Designation:E963-95,Standard Practice for Electrolytic Extractionof Phase from Ni and Ni–Fe Base Superalloys Using a Hydrochloric-Mehanol Electrolyte.。
机器人学导论 chapter4

Inverse ManipulatorKinematicsAlgebraic solution by reduction to polynomialOutline2 Introduction IntroductionIntroductionThe Inverse kinematic is the basis of robot trajectory planning and control.5IntroductionExample :6Algebraic solution by reduction to polynomialOutline7SolvabilitySolvabilityFor the 6 DOF Puma 560 manipulator,we have:How to find the 6 joint variablesHere we might have 12 equations to solve for 6 independent variables. Constraints should be utilized.6 equations for 6 unknown variables9SolvabilityDifficulty: these 6 equations are nonlinear and transcendental equations.obtain the solution.whereSolvability11SolvabilitySolvabilityThe dexterous workspace is only one point(the origin). The There is no dexterous workspace. The reachable SolvabilityFor most industry robots, there is limitation for the joint variable range, thus the workspace is reduced.Only one attainable orientationIf a manipulator has less than 6 DOF, it can’t attain general goal position and orientation in 3D space.Workspace also depends on the tool-frame transformation.Solvability15There might be multiple solution in solving kinematic equations.Two possible solution for the same position and orientation.How to choose possible solution?Solvability” solution.The number of solutions depends on the number of and the allowable ranges of motion of the joints, also, it can be a function of other link parameters (link length, link twist, link offset, joint angle).Solvability2. Multiple solutions17The PUMA 560 can reach certain goals with 8different solutions.+Due to the limits of joints range, some of these 8 solutions could be inaccessible.SolvabilitySolvabilityAlgebraic solution by reduction to polynomial Outline20Manipulator Subspace21workspace is a portion of an n‐DOF subspacesubspace : planeworkspace : a subset of the plane{workspace} ⊂{subspace} ⊂{space}Manipulator Subspaceof a manipulator?Giving an expression for a manipulator’s wrist frame {w}to be free to take on all possible values.Manipulator SubspaceThe subspace of is given by:233R planar manipulatorAs are allowed to take on arbitrary values, the subspace is generatedNOTE : Link lengths and joints limits restrict the workspace of the manipulator to be a subset of this subspace.Algebraic solution by reduction to polynomial Outline24Algebraic vs. GeometricGiven the transformation matrix, solved for25Algebraic vs. GeometricD-H TableAlgebraic vs. GeometricThe transformation matrix can be computed viaand we haveAlgebraic vs. GeometricSpecification of the goal points can be accomplished by specifying three parameters: ..The transformation is assumed to have the following structurewhereThe above four nonlinear equations are used to solve for (unknown)Algebraic vs. GeometricThe parameters is How to solve for according thefollowing equations:Algebraic vs. Geometric1.Algebraic solution 30The is the only unknown parameter.Algebraic vs. GeometricStep1.In the solution algorithm, the above constraintshould be checked to determine whether a solution exist or not. If the constrain is not Algebraic vs. Geometric1.Algebraic solution Here, the choice of signs in the solution of corresponds to Algebraic vs. Geometric33Based on the solution of , we can get:whereAlgebraic vs. Geometricwe haveAlgebraic vs. GeometricNote:If a choice of sign is made in the solution of ,it will affect and thus affectStep5. Based on the fact that The solution of can be obtained.Algebraic vs. Geometric36solved for by using the tools of plane geometry.can utilize plane geometry directly to find a solution.Algebraic vs. Geometricconsidering the solid triangle, the “” can be applied to solve for as:37PossibleconfigurationThe other possible solution can be obtained by settingAlgebraic vs. Geometric2. Geometric solutionTo solve for , we find the express for angleand .38and can be solved via:then can be solved as:Algebraic vs. Geometric39the solution of can Algebraic solution by reduction to polynomial Outline40Algebraic solution by reduction to polynomialexpression in terms of a single variable.This is a very important geometric substitution used often in solving kinematic equations. These substitution convert transcendental equations into polynomial equations in Algebraic solution by reduction to polynomialGiven a transcendental equation try to solve for42Solutions:(when )Algebraic solution by reduction to polynomial Outline43Inverse manipulator kinematicsThe Unimation Puma 560 Industry Robot44Inverse manipulator kinematicsReview : D-H table45Inverse manipulator kinematicsReview : Transformation of each link.46Inverse manipulator kinematicsReview : Transformation of all link47whereInverse manipulator kinematics: Given the goal point and orientation specified by:(Known: Numerical value)Solve forInverse manipulator kinematics Separating out 1 unknown parameter How to solve ?Inverse manipulator kinematics2. Inverting to be obtain50 whereInverse manipulator kinematicsCheck the (2,4) elements on both sides ,we have Inverse manipulator kinematicsIntroduce the trigonometric(三角恒等变换) substitutions:52whereThen it can be obtained that:Inverse manipulator kinematics3. The left side of the following equation is known53Inverse manipulator kinematicsTaking square of the above two equations, and adding the results together, it can be obtained thatInverse manipulator kinematicsThe above equation depends only on , then similar steps can be followed to solve for as:4. Consider the following equationhave been solved, but is unknownInverse manipulator kinematics56Eq.(3.11) in Chapter3Check elements (1,4) and (2,4) on both sides, we haveInverse manipulator kinematics 57Inverse manipulator kinematics585. Now the left side of the following equation is knownEq.(3.11) in Chapter3Check the elements (1,3) and (3,3), it can be obtained thatInverse manipulator kinematics ca can be solved as:Case2.,The manipulator is in a singular configurationas axis 4 and 6 line up and cause the same motion of the last link of the robot. Thus is chosen arbitrarily.Inverse manipulator kinematics606. Consider the following equation again:andCheck the elements (1,3) and (3,3), it can be obtained thatInverse manipulator kinematics 61Hence, we can solve for as7. Applying the same method one more time, we havewhereCheck the elements (3,1) and (1,1), it can be obtained thatInverse manipulator kinematics62Thus we can solve for aswe can obtain eight sets of possible solutions, some of them will be discarded due to the joint angle limitsInverse manipulator kinematics63Summary1、原则:等号两端的矩阵中对应元素相等,列出相关方)、从含变量少的左边开始,如,向右递推,直到)、选择等号左边或右边矩阵中等于常数或仅含有一个变量的元素,列出相应元素对应的方程或方程组。
材料成型专业英语 Heat Treatment
English in Materials Science and Engineering
The presence of undissolved particles increases the value of G, since these particles serve as additional nuclei. The value of G diminishes with increasing size of austenitic grains. Crystallization nuclei appear mainly on grain boundaries, therefore, the conditions for nucleation are worse in coarse grained steel where the extent of grain boundaries is smaller.
2012-5-26 合肥工大材料学院 何顺荣制作 8
English in Materials Science and Engineering
In hypoeutectoid * steels, the transformation of austenite begins with the formation of ferrite and the saturation of the remaining solution with carbon, and in hypereutectoid steels, with the precipitation of cementite and depletion* of the austenite of carbon. [2]
《金属基复合材料》第二章,界面及相容性
2.2 Definition of interface (界面的定义)
It is a micro-region between matrix and reinforcements where the chemical composition is changed markedly and load can be transferred. It is a new phase which has a certain thickness and structure of which has obvious difference as compared to reinforcement or matrix. So called interfacial phases.
Type of interfacial binding force:(界面结合力有三类) 1) Mechanical combining force —— Friction,
(机械结合——摩擦力)
2) Physical combining force —— Vanderwaals force and hydrogen bond,(物理结合——范德华力和氢键)
metal matrix composite materials cannot be considered in isolation, they are mutually related. Chemical interactions and reactions between the matrix and the reinforcement component determine the interface adhesion, modify the characteristics of the composite components and affect the mechanical characteristics significantly. In high temperature use of MMCs the microstructure has to remain stable for long service periods. Thermal stability and failure is determined by changes in the microstructure and at the interfaces, e.g. reaction and precipitation processes. Thermal stress of MMCs can take place both isothermally and cyclically. The effects show differences. During a cyclic load of monolithic materials, especially at high temperature gradients and cycle speeds, a high probability of failure by thermal fatigue is to be expected, e.g. short-fiber reinforced aluminum alloys possess good thermal shock stability. The formation of the interface between the matrix and the reinforcing phase has a substantial influence on the production and characteristics of the metallic composite materials. The adhesion between both phases is usually determined by the interaction between them. During the production of the molten matrix e.g. by infiltration, wettability becomes significant.
【神圣几何】金字塔科技
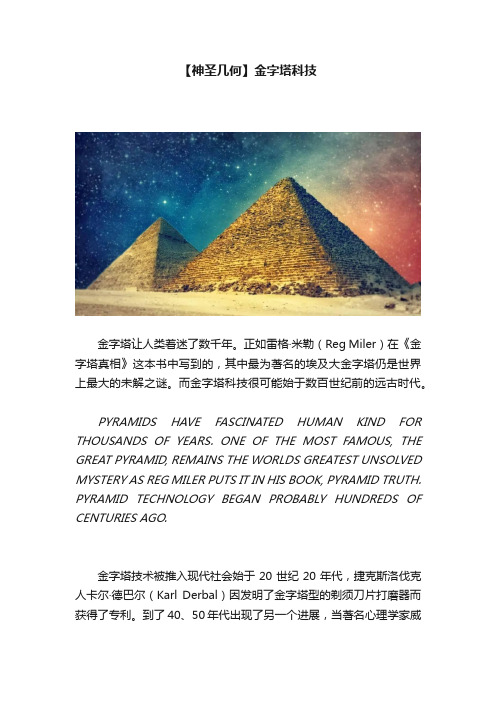
【神圣几何】金字塔科技金字塔让人类着迷了数千年。
正如雷格·米勒(Reg Miler)在《金字塔真相》这本书中写到的,其中最为著名的埃及大金字塔仍是世界上最大的未解之谜。
而金字塔科技很可能始于数百世纪前的远古时代。
PYRAMIDS HAVE FASCINATED HUMAN KIND FOR THOUSANDS OF YEARS. ONE OF THE MOST FAMOUS, THE GREAT PYRAMID, REMAINS THE WORLDS GREATEST UNSOLVED MYSTERY AS REG MILER PUTS IT IN HIS BOOK, PYRAMID TRUTH. PYRAMID TECHNOLOGY BEGAN PROBABLY HUNDREDS OF CENTURIES AGO.金字塔技术被推入现代社会始于20世纪20年代,捷克斯洛伐克人卡尔·德巴尔(Karl Derbal)因发明了金字塔型的剃须刀片打磨器而获得了专利。
到了40、50年代出现了另一个进展,当著名心理学家威廉·赖希(Wilhelm Reich)提出的奥根效应(Orgone effect)被应用到金字塔科技时,极大的增强了这些技术的多功能疗愈和排毒效果。
It got its first real push into modern society in the 1920s, when Karl Derbal of Czechoslovakia, received a patent for the pyramids used as a razor blade sharpener. Then another development occurred in the 1940s to 1950s, when Wilhelm Reich discovered the Orgone effect which, when applied to pyramid technologies, greatly enhanced the multipurpose healing and detoxification effect of pyramids.我们都知道金字塔很特别。
关节的生物力学
软骨性连接
纤维性连接
• 动关节有:
• 滑膜连接(Synovial joints) • 动关节的两块骨之间会有腔隙。关节面会有关节软骨。整 个关节在外形上是一个关节囊.它由 • 外面的纤维膜 Membrana fibrosa (致密结缔组织) • 内面的滑膜 Membrana synovialis (一类似表皮组织的 结缔组织) • 关节韧带启动加固关节的作用。关节韧带分为囊外韧带和 囊内韧带两种。后者会部分过渡成为滑膜。 • 关节囊内有腔隙关节腔。内有粘性液体填充,称为滑液, 它是滑液膜的分泌物。
• • • • • •
自由度2 Flexion(弯曲) 120–140 Extension (伸展)0 Medial rotation (内旋)30 Lateral rotation (外旋)40 当身体有大的冲击时,如起跳,爬行,膝关节承 受的压力是身体的数倍。但是膝盖周边复杂的骨 和韧带加上肌肉都能很好的动态调节,时刻维持 着其稳定性。
• • • • • • • •
自由度 3 Flexion(弯曲) 90–120 Extension(伸展) 10–20 Abduction(外展) 30–45 Medial rotation(旋内) 30–40 Lateral rotation(旋外) 60 Circumduction Complete 在单脚站立的时候,髋关节承受3倍体重(BW) 的力量。大步行走或者跑步时,可能会增加到体 重的6倍左右
球窝关节
枢纽关节
车轴关节
椭球关节
鞍形关节
关节动力学
• 简单的说就是关节受到的力及其运动情况。但实 际运动过程中各个组织的受力,运动,变化又是 很复杂的。
数据分析
• 数据收集
The structure of the nucleon

F1s(Q2) =
1 2
g
(Q2)
βωs
m2ω m2ω + Q2
+
βφs
m2φ m2φ + Q2
,
F2s(Q2) =
1 g(Q2) 2
αsω
m2ω m2ω + Q2
+
αsφ
m2φ m2φ + Q2
.
(3)
The β’s and α’s in Eqs. (2) and (3) are not independent of one another. The coefficients appearing in the isoscalar and strange form factors depend on the same nucleon-meson and current-meson couplings [ 9]. In addition, they are constrained by the electric charges and magnetic moments of the nucleon
机械制造专利翻译词汇_部分6
killed steel 镇静钢(脱氧钢)kinematic analysis 运动分析kinematic chain 运动链kinematic design 运动设计kinematic design of mechanism 机构运动设计kinematic inversion 反转法kinematic inversion 机架变换kinematic inversion 运动倒置kinematic pair 运动副kinematic precept design 运动方案设计kinematic sketch 运动简图kinematic sketch of mechanism 机构运动简图kinematic synthesis 运动综合kinematic viscosity 运动粘度kinematical seal 动密封knife-edge follower 尖底从动件knock 敲缸knuckle-joint press 曲柄压力机knurled nut 滚花螺母labour hygiene standard 劳动卫生标准labour productivity of repair man 汽车修理工人实物劳动生产率labour protectig standard 劳动保护标准labyrinth seal 迷宫密封lack of painting 烤漆不到位lack of power 乏力ladle 浇包lamp holder 灯架lap welding 搭接焊lapping 打光lapping 研磨lapping machine 研磨机large spool 大焊丝盘laser hardening 激光硬化laser machining 激光加工laser welding 激光焊接lasering heat treatmetn 激光热处理latex 胶乳lathe 车lathe 车床lathe 车床lathe 车床Layout 布置图Layout 布置图layout of cam profile 凸轮廓线绘制lbs. Inch 镑、英寸lbs. inch 镑、英寸lead 导程lead 螺纹导程lead alloy 铅合金lead angle 导程角lead angle at reference cylinder 分度圆柱导程角lead base babbitt 铅基巴氏合金lead bronze 铅青铜lead fouling (火花塞)铅沉积lead lined steel tank 衬铅槽lead-base alloy 铅基合金lead-bronze bearing 铅表铜轴承lead-covered steel sheet 镀铅钢板leakage 泄漏leakage 泄漏leatherette 人造革ledeburite 莱氏体left fork 叉车left fork 叉车length of line of action 啮合线长度level of standardization 标准化的水平levelling power 均镀力levels of standards 标准的级别liaison 联络单lift 升距light cargo 轻泡货物light metal alloy 轻金属合金light rail rapid transit car 快速有轨电车Light Source 光源lighting cable 照明电缆lightning conductor 接地极lime grease 钙基润滑脂lime-sodium base grease 钙-钠基润滑脂limiting clearance 极限间隙limiting condition of vehicle 汽车极限技术状况limiting wear 极限磨损line borer 直线镗削机line number 路别line of action 啮合线line of centers 连心线line supervisor 线长line supervisor 线长linear cutting 线切割linear cutting 线切割linear motion 直线运动link 构件linkage 连杆机构lip rubber seal 唇形橡胶密封lipowit's metal 李彼威特合金liquefied petroleum gas(LPG) 液化石油气liquid spring 液体弹簧list 目录little finger 小指load 载荷load balancing mechanism 均衡装置load rating 额定载荷load—deformation curve 载荷 — 变形曲线load—deformation diagram 载荷 — 变形图loader 上料器loading and unloading charge 装卸费用loading mileage 载货行程load-shedding equipment 减负荷装置local bus 慢车local hardening 局部淬火location 地点long distance bus sto 长途公共汽车站long distance transportation 长途运输long goods 长型货物long-distance bus 长途公共汽车loom 织布机loop line 环形线路lots of production 生产批量loudspeaker 扬声器low alloy steel sheet with high strength 高强度底合金钢板low brake pedal 制动踏板过低low lead fuel 低含铅汽油low temperature annealing 低温退火low temperature tempering 低温回火lower die 下锤头lower pair 低副low-floor bus 低地板式公共汽车low-shaft furnace 坑式炉lubricant 润滑剂lubricant 润滑剂lubricant film 润滑油膜lubrication 润滑lubrication device 润滑装置lubricity 润滑性Luft Dushe steel 顶吹氧转炉钢luminous paint 发光漆maceration 侵渍作用machine 机器machine design; mechanical design 机械设计machine forging 机器锻造machinery 机械machining 机加工macrography 低倍照相macro-structure 宏观组织magnalium 镁铝合金magnesium 镁金magnetic fluid bearing 磁流体轴承magnetic levitated vehicle 磁垫车magnetic steel 磁钢magnetic tickeet 磁性月票magnetizer 加磁器main bearing aligning gauge 主轴承座孔同轴度检验仪main flow during the peak period 高峰主流向main line 正线main manifold 主集流脉maintainability of vehicle 汽车维修性maintenance depot (station )of vehicle 汽车维修场(站)major defect 主要缺陷major failure 严重故障major repair of vehicle 汽车大修male die 公模malfunctioning 故障malleable cast iron 可锻铸铁Maltese cross 马耳他十字mandatory standard 强制性标准Man-day total/work-day total 工日合计manganese brass 锰黄铜manganese bronze 锰青铜manganin 锰铜manifold pressure gauge set 歧管压力表manipulator 机器人操作器manipulator 机械手manual fuel pump 手油泵manual welding 手工焊manufactruing equipment of automobile 汽车制造设备manufacture management 制造管理manufacture procedure 制造过程manufacture procedure 制造过程manufacturing defect 制造缺陷marquenching 分级淬火martensite 马氏体masking 遮蔽mass 质量mass transit system 大运量客运系统mass-radius product 质径积matching 拼接material change, stock change 材料变更material check list 物料检查表material check list 物料检查表materials 物料materials expenses 材料费materials used in auto manufacturing 汽车用材料mathematic model 数学模型matrix 矩阵maximum difference work between plus and minus work 最大盈亏功maximum passenger capacity 最大载客量ME 制造工程师ME 制造工程师mean diameter 中径mean screw diameter 平均中径mechanical 机械的mechanical advantage 机械利益mechanical behavior 机械特性mechanical creation design, MCD 机械创新设计mechanical efficiency 机械效率mechanical plating 机械电镀mechanical press 机械压力机mechanical speed governors 机械调速mechanical stepless speed changes 机械无级变速mechanical system 机械系统mechanical system design, MSD 机械系统设计mechanical wear 机械磨损mechanical-electrical integration system design 机电一体化系统设计mechanism 机构mechanism 机构学mechanism with flexible elements 挠性机构medium repair of vehicle 汽车中修medium temperature tempering 中温回火membership 隶属度Mercury Lamp 水银灯具metal 金属metal arc welding 金属极电弧焊接metal case hardening 金属表面强化处理metal halide lamp 金属卤化物灯metal heat treatment 金属热处理metal inert gas arc welding 金属极惰性气体保护点焊metal plate 钣金Metallic Halide Lamp 金属卤化物灯metallography 金相学metered fare 计程票制metering panel 计量盘methanol 甲醇method of vehicle maintenance 汽车维护方法method of vehicle maintenance on universal post 汽车维护定位作业法methylated spirit 含甲醇酒精metric gears 公制齿轮micro-structure 显微组织midfinger 中指mid-plane 中间平面mild steel 软钢mildewed=moldy=mouldy 发霉mileage between repair 修理里程mill 锉milled helicoids worm 锥面包络圆柱蜗杆miller 铣床miller 铣床minibus 小公共汽车minimum radius 最小向径minimum teeth number 最少齿数ministerial standard 部标准minor defect 次要缺陷minor diameter 小径minor failure 一般故障misfiring 不发火(不点火)missing part 漏件mixed color 杂色mixture robbery 抢气model 机锺modern machine design 机械的现代设计modification coefficient 变位系数modified gear 变位齿轮modified sine acceleration motion 修正正弦加速度运动规律modified trapezoidal acceleration motion 修正梯形加速度运动规律modular design, MD 模块化设计modular system 模块式传动系统modulation, regulation 调节module 模数molding 成型molding factory 成型厂molding factory 成型厂moly high speed steel 钼高速钢moment 力矩moment of couple 力偶矩moment of flywheel 飞轮矩moment of inertia ,shaking moment 惯性力矩moment of torque 扭矩monel 蒙乃尔合金mongline 单线monorail car 单轨车monorail transit system 单轨运输系统monthly ticket 月票mop 拖把morning peak 早高峰morphology box 模幅箱motor vehicle liquidation 汽车报废moulded bearing metal 浇铸式合金轴承moving link 运动构件multi-diameter shaft 阶梯轴multilaterally harmonized standard 多边协调标准multilayer welding 多层焊multilingual international standard 多种语言的国际标准multi-operator welding set 多站电焊机multipass welding 多道焊multiple abrasive wheels surface grinding machine 多砂轮平面磨床multiple impression forging 多型槽锻造multiple projection welding 多点凸焊multiple spot welder 多点焊机multiple station combined machine for piston machining 活塞加工多工位组合机床multipurpose additive 多用途添加剂multi-row bearing 多列轴承multi-spindle deep hole drilling machine 多轴深孔钻床multi-steel 多层钢multi-steel sheet with plastic plate 塑料夹层消声钢板multi-tool cutting 多刀切削N/C crankshaft milling machine 数控曲轴铣床name of a department 部门名称narrow V belt 窄 V 带national standard 国家标准national standard 国家标准national standardization 国家标准化national standardization plan 国家标准化计划national standards body 国家标准机构national technical committee for standardization 全国标准化技术委员会natural gasoline 天然汽油natural rubber 天然橡胶neckling die 缩口模needle bearing 滚针轴承needle roller 滚针needle roller bearing 滚针轴承neon spark tester 氖管火花试验器nephelometer 浊度计network element 网络单元network of vehicle maintenance and repair 汽车维修网点new work item proposal 新工作项目建议nick 缺口nickel brass 镍黄铜nickel bronze 镍青铜night bus 夜班车night line 夜间线路night-bus stop board 夜班车站牌nitriding 渗氮(氮化)nitriding steel 氮化钢nitrile butadiene rubber(NBR) 腈基丁二烯橡胶nitrile rubber 丁腈橡胶nitrocellulose enamel 硝基面漆nitrocellulose filler 硝化腻子nitrocellulose primer 硝基底漆no-draft forging 挤压模锻nodular cast iron 球墨铸铁noisy brake 制动器发响no-loading mileage 不载货行程nomenclature 名称nominal diameter 公称直径nominal stress 名义应力、公称应力Nomogram 诺模图non gas shielded arc welding 无气体保护电弧焊non=ferrous metal 有色金属non-chip finish 少无切削加工non-circular gear 非圆齿轮non-contact seal 非接触式密封non-cyanide plating 无氰电镀nonflammable paint 耐火漆nonstandard gear 非标准齿轮normal circular pitch 法面齿距normal force 法向力normal load 垂直载荷、法向载荷normal module 法面模数normal parameters 法面参数normal pitch 法向齿距normal plane 法面normal pressure angle 法面压力角normal stress 正应力、法向应力normal tooth profile 法向齿廓normal wear 正常磨损normalizing 正火normative document 标准文件normative element 标准的成分normative reference 参考标准normative requirement 标准的要求not up to grade, not qualified 不合格not up to standard 不合规格notes 说明nugget 焊核number of threads 蜗杆头数number of vehicles being received from maintenance or repair 汽车维修竣工辆次number of waves 波数numerator 分子nut 螺母。
α2-巨球蛋白通过调控血管内皮细胞改善小鼠激素性股骨头坏死

糖皮质激素(GC )广泛应用于严重感染、血液病和自身免疫性疾病,发挥其抗炎、代谢调节和免疫抑制的作用[1]。
然而,超生理剂量GC 的应用可导致库欣综合征、骨质疏松和心血管反应等一系列的副作用。
激素性股骨头坏死(SANFH )是过量使用糖皮质激素的严重后α2-macroglobulin alleviates glucocorticoid-induced avascular necrosis of the femoral head in mice by promoting proliferation,migration and angiogenesis of vascular endothelial cellsZHU Qi,LU Yunxiang,PENG You,HE Jiale,WEI Zeyu,LI Zhiyong,CHEN YuxianDepartment of Joint Surgery,Third Affiliated Hospital,Sun Yat-Sen University,Guangzhou 510630,China摘要:目的探讨α2-巨球蛋白(A2M )是否对激素性股骨头坏死(SANFH )具有保护作用。
方法体外实验:用梯度浓度(10-8~10-5mol/L )地塞米松(DEX )处理人脐静脉内皮细胞(HUVECs )建立糖皮质激素(GC )诱导内皮细胞损伤体外模型,设置对照组、DEX 组、DEX+A2M (0.05mg/mL )和DEX+A2M (0.1mg/mL )4组,采用CCK-8法检测细胞活性,Transwell 实验和划痕愈合实验检测HUVECs 迁移,血管形成实验检测HUVECs 血管形成能力,Western blot 检测HUVECs 中CD31和VEGF-A 蛋白表达水平。
体内实验:将24只BALB/c 小鼠分为对照组、模型组(GC )和干预组(GC+A2M ),Micro-CT 检测骨小梁情况,HE 染色观察组织学特征,免疫组化染色检测CD31的表达。
一种新型两平移两转动并联机构的拓扑设计及其运动学性能分析

2023年第47卷第12期Journal of Mechanical Transmission一种新型两平移两转动并联机构的拓扑设计及其运动学性能分析吉恩成沈惠平李菊(常州大学现代机构学研究中心,江苏常州213016)摘要首先,基于并联机构拓扑结构设计方法设计了两平移两转动(2T2R)并联机构,其耦合度为1,并计算了方位特征(Position Orientation Characteristics,POC)集、约束度和自由度;其次,分析了该机构的拓扑特征运动学,求解了该机构的位置正解与位置反解,验证了正解与反解的正确性;最后,基于位置反解对该机构的奇异性、工作空间进行分析计算,得到了机构可能发生的奇异位置,并求得了机构的最大可达空间。
这为机构的动力学和动平衡研究以及样机制造奠定了基础。
关键词并联机构耦合度奇异性方位特征运动学Topological Design and Kinematic Performance Analysis of a New ParallelMechanism with Two Translations and Two RotationsJi Encheng Shen Huiping Li Ju(Research Center of Modern Mechanism Theory, Changzhou University, Changzhou 213016, China)Abstract Firstly, based on the topological structure design method of the parallel mechanism, a two-translation and two-rotation (2T2R) parallel mechanism is designed. Its coupling degree is 1, and the position orientation characteristics (POC) set, constraint degree and degree of freedom are calculated. Secondly, the to⁃pological characteristic kinematics of the mechanism is analyzed, and the forward and inverse position solutions of the mechanism are solved, which verifies the correctness of the forward and inverse solutions. Finally, based on the inverse position solution, the singularity and workspace of the mechanism are analyzed and calculated, the possible singular position of the mechanism is obtained, and the maximum reachable space of the mecha⁃nism is obtained, which lay a foundation for the dynamics and dynamic balance research of the mechanism, as well as the manufacturing of the prototype.Key words Parallel mechanism Coupling degree Singularity Position orientation characteristics Kinematics0 引言目前,在自动化机加工的工厂当中,4自由度的两平移两转动(2T2R)并联机器人较为常见。
Kinenatics Dexterity Analysis and Optimization of 4-UPS-UPU Parallel Robot Manipulator

Kinematics Dexterity Analysis and Optimization of 4-UPS-UPU Parallel Robot ManipulatorGuohua Cui∗, Haiqiang Zhang, Feng Xu, and Chuanrong SunCollege of Equipment Manufacture,Hebei University of Engineering,Handan, Hebei Province, 056038, Chinaghcui@, zhq19860905@Abstract.The development of a new parallel robot manipulator based onsimulation analysis is a rapid approach to discover the unique features oradvantage of a conceptual model. In this paper, a 5-DOF parallel robotmanipulator which can generate three translations and two rotations waspresented. The kinematics mathematical model and Jacobian matrix werederived analytically. The global conditions index (GCI) and the global gradientindex (GGI) which represent the evaluation index of dexterity were introducedby considering the kinematics performance indices over the whole workspace.The workspace model of the mechanism was analyzed based on a simplifiedboundary searching method. The mathematical model of the global conditionnumber was developed simultaneously. The multi-objective optimization modelwas deduced on the basis of the multidisciplinary design philosophy. Themanipulator was optimized by using the design of experiment (DOE) and themulti-island genetic algorithm (MIGA). The optimal solution was chosen fromthe multi optimal solutions in a reasonable manner. Through the comparison ofresults before and after optimization, the kinematics performance of themechanism was improved, which provide not only a guide to the multipleobjectives optimal design but also an applicable method of dimensionalsynthesis for the optimal design of general parallel robot manipulator.Keywords:Parallel Robot Manipulator, Kinematics Dexterity, Workspace,Multi-objective optimization.1IntroductionParallel manipulator has the advantage of high rigidity, strong bearing capacity, and high precision and small error. Since the Stewart Parallel Manipulator, parallel manipulator has become an international research focus [1][2]. The dexterity and isotropy are of importance performance index to evaluate the mechanism. The kinematics dexterity can evaluate the transmission performance. Gosselin [3] ∗ This research was supported by the national natural science foundation of China under grant No. 51175143.2 G. Cui et al.introduced the concept of dexterity into parallel manipulator, and pointed out that the condition of Jacobian matrix can represent the dexterity; Zhang [4] adapted the kinematics condition index (KCI) to evaluated the dexterity, and draw the distribution atlas of spatial KCI; Moreno [5] regarded the condition of Jacobian matrix as the performance index of dexterity, calculated and analyzed the condition. Sergiu [6] proposed a large number of performance criteria dealing with workspace, quality transmission, manipulability, dexterity and stiffness, and the evaluation measures can be used for optimal synthesis; Chen [7] studied the dexterity of 4-UPS-UPU parallel manipulator focused on the seven performance indices; Qi [8] analyzed the structure of the five degree of freedom 4-UPS-UPU and proposed synthesis methods about the operation performance optimization on the orientation workspace.In this paper, a five degree 4-UPS-UPU parallel manipulator was studied and its kinematics model and the dimensionless Jacobian matrix were established. Considering the kinematics performance on the workspace, the GCI and GGI were introduced as the evaluation index of the dexterity, which was optimized based on the multidisciplinary and multi-objective optimization software Isight. On the basis of workspace, the global condition index was developed and obtained the mathematical model of optimization. Last we obtained the Pareto solution by using design of experiment and multi-island genetic algorithm and selected the reasonable optimal solution. Compared the results before and after optimization, we can draw the conclusion that the new mechanism after optimization has excellent dexterity and transmissions performance, which provide a guide for design optimization and performance assessment. Therefore, it is necessary to seek an effective optimization procedure to improve the performance indices for achieving a higher score evaluation. 2 4-UPS-UPU Parallel Manipulator ModelAs shown in Fig.1, 4-UPS-UPU parallel manipulator model and coordinate system were established, which consists of a moving platform, fixed platform and the legs connected the moving platform and the fixed platform, for four identifiable active chains UPS and one constraint active chain UPU, U stands for Hooke joint, P stand for Prismatic joint, S for Spherical joint, where the P joint is driven by a linear actuator.Suppose that the platforms are circular and the connection points are distributed along the circumference of the moving platform and the fixed platform circles of radii a r and b r , respectively. The coordinate system O XYZ −is fixed to the fixedplatform and the coordinate o xyz −is attached to the moving platform. x axis point to 1A ,z axis perpendicular to the moving platform on the positive axis directionand y axis is given by the right hand. Similarly,X axis point to 1B point, the Z axis isvertical. The points of intermediate branched Hooke joints are located on the point o and point O of the moving platform and the fixed platform, respectively.Kinematics Dexterity Analysis and Optimization 33Fig. 1. The schematic diagram of 4-UPS-UPU parallel manipulator architectureThe number of degree of freedom for the parallel manipulator can be obtained by the general Kutahach-Grubler formula [9]1=d(1)6(12151)295g i i M n g f =−−+=×−−+=∑ (1)The 4-UPS-UPU parallel manipulator is a spatial 5-DOF, its moving platform can move in X ,Y ,Z and rotate around X and Y direction.34-UPS-UPU Parallel Manipulator Kinematics Model 3.1 Inverse Kinematics SolutionAs shown in Fig.1, position vector i A ,i B and branched chains i i A B , for 1,2,3,4i =, theCartesian coordinate of the moving platform is given by the position vector O i A with respect to the moving coordinate system, and the position of the attachment point i B with respect to the fixed coordinate system can be written as O i B . The Cartesianvariables are chosen to be the relative position and orientation of o xyz −frame with respect to O XYZ − frame, where the position of o is specified by the position of its origin with respect to O XYZ −frame, Furthermore, if vector []T o x y z =described the position of the attachment point o with respect to O XYZ −frame. The coordinate can be represented as following,T o i ixiy iz A A A A ⎡⎤=⎣⎦, []T O i iXiY iZ B B B B =, []TO i iX iY iZ A A A A =4G. Cui et al. O i Ais expressed with respect to the coordinate system O XYZ −can be computed by O o i i A Q A o =+ (2)Q is a matrix describing the orientation of o xyz −with respect to the O XYZ −, here RPY coordinate system representation is chosen to describe the pose, that is ,c s s c s Q c c s s c c c βαβαβααβαβαβ⎡⎤⎢⎥=−⎢⎥⎢⎥−⎣⎦(3)Where, s and c present sine and cosine, respectivelyThe length vector can be expressed asO O i i i i i L A B A B ==− (4)Then, the length of the active leg can be expressed by taking the norm of the vector of Eq.(4), we can get theO O i i i i i l A B A B ==− (5)3.2 Jacobian Matrix of the Parallel ManipulatorThe relation between active joint velocities 12345T l l l l l l ⎡⎤=⎣⎦and twist of the end-effector Tx y t x y z ωω⎡⎤=⎣⎦ can be described using a differential kinematicsmodel, namely,l t =J (6) Where J denote the Jacobian matrix12345121122334455[]T q q q q q r q r q r q r q r q ⎡⎤==⎢⎥×××××⎣⎦J J J # (7) Where, the unit vector i q , for 1,2,3,4,5i =can be expressed in terms of position vectors, namely,i i iL q l = (8) And vector i r can be written aso i i r Q A = (9)1J denoted Jacobian matrix of linear velocity and 2J denoted Jacobian matrix ofangle velocity , whose dimension of 1J and 2J are both 63×. Considering the unitKinematics Dexterity Analysis and Optimization 5 difference of the Jacobian matrix was dimensionally inhomogeneous [10]. So we use a characteristic length,c L , to homogenize the original Jacobian matrix in such a way that111(1,1,1,,,)H c c cdiag L L L =⋅J J (10)Where,c L H J denotes the new homogeneous Jacobian matrix. 4 Performance Index of Kinematics DexterityIn order to make the mechanism has good kinematics performance in the workspace, the kinematics dexterity optimization was studied and the GCI and the GGI were introduced as the evaluation index [11].4.1 The Global Condition IndexThe condition number of the Jacobian matrix changed along with the position and orientation of parallel robot manipulator, therefore, it cannot be measured the dexterity of the mechanism in the whole workspace. In order to obtain the kinematics performance in the whole workspace, Gosselin and Angeles [12] proposed the global condition index, which is a measure of its kinematics precision and control accuracy and which is defined as the ratio of the integral of the inverse condition numbers calculated in the whole workspace, dived by the volume of the workspace, i.e.,WWdW GCI dW ν=∫∫ (11) In which ν is the local condition number defined as the reciprocal of the condition of the Jacobian matrix at a particular pose, and W is the workspace. It is noteworthy that the Global Condition number Index is bounded as (0, 1). If the GCI approach zero, the mechanism has a bad global performance and as the GCI approaches one the mechanism has a good global performance. Therefore, we should make the optimization objective GCI maximization.4.2 The Global Gradient IndexThe global gradient index reflected the average deviation level of the kinematics performance in the working space, and cannot reflect the fluctuation properties of mechanism in the working space. ra-Molina [13] proposed the global gradient index, which represented the fluctuation information of the local performance index, and defined asmax 1/()WGGI J κ∇=∇ (12)6 G. Cui et al.Where, the local gradient condition number can be expressed as1/()1/()1/()1/()1/()1/[,,,,]J J J J J x y z κκκκκκαβ∂∂∂∂∂∇=∂∂∂∂∂ (13) GGI is approximately equal to the maximum value of the local gradient throughout the workspace. As the gradient is bigger, so the fluctuation of the kinematics dexterity is greater. That means the kinematics performance of the parallel robot manipulator is up and down in the entire workspace. If the gradient is small, the kinematics performance of the mechanism in the working space is more stable. Therefore, the global gradient index should take the smallest value in the whole working space.4.3 The Workspace AnalysisThe workspace of parallel robot manipulator can be divided into constant orientation workspace and the dexterous workspace. Because of rotation around z axis constrained by the institution, so the mechanism doesn’t have the dexterous workspace. In this paper, we established the GCI based on the constant orientation workspace, according the Section 4.1, we need to solve the workspace [14]. The workspace can be expressed as{}(,,)|(,,)0W x y z R f x y z =∈≤ (14)Where, (,,)0f x y z ≤denoted the constraint condition, namely,(1) The active chains length constraints can be expressed bymin max l i l l ≤≤ (15)Where max l denoted the maximum link length, i l denoted the link length of the i thlink, and min l denoted the minimum link length;(2) The rotational angle of the spherical joint and the Hooke joint and their constraint can be computed bymax os(/)u i i u arcc l eb l θθ=≤i (16)max cos(/)s i i s arc l ea l θθ=≤i (17)Where, ea , eb represented the unit normal vector of the moving platform and fixed platform, respectively. max u θ, max s θrepresented the max angle limitation of the Hookejoint and Spherical joint, respectively.(3) The mechanism was non-singular configuration, namely, the determinant of the Jacobian matrix was not equal to zero.In order to obtain the position workspace of 4-UPS-UPU parallel manipulator quickly, we set the structural parameters of the parallel robot manipulator as, respectively: the circumcircle radius of the moving platform 0.06a r =m, the circumcircle radius of the fixed platform 0.15b r =m, the maximum shrinkage limit of the active chains are 0.05m ,the maximum elongation limit is 0.25m , the maximumKinematics Dexterity Analysis and Optimization7 angle of the Hooke joint and the Spherical joint are both 3π. The translation ranges ofthe moving platform when 0αβ==D are x [0.1,0.1]m m ∈−,y [0.1,0.1]m m ∈−, z [0.05m,0.2m]∈. The workspace is drawn using software MATLAB, as shown in Fig.2.Fig. 2. Workspace of the 4-UPS-UPU parallel manipulator5The Multi-objective Optimization Problem of 4-UPS-UPU Parallel Robot Manipulator 5.1 The Optimization ModelThe scale parameters of the parallel manipulator were radii of the moving platform a r and the fixed platform b r . Select the link length of the active chains i l , and angle of the Hooke joint u θ and Spherical joint s θas the constraint conditions, theoptimization objective functions for GCI and the GGI , then the multi-objective optimization model can be expressed as12max (r )max -(r r )a b a b f GCI r f GGI =⎧⎨=⎩、、 (18) s.t. 0.030.080.080.180.050.32533a b i s u r r l πθπθ≤≤⎧⎪≤≤⎪⎪≤≤⎪⎨≤⎪⎪⎪≤⎪⎩(19)8 G. Cui et al.5.2The Optimization Results AnalysisIsight software integrated MATLAB, which adopted design of experiment and optimal algorithm to solve the maximum value of GCI and the minimum value of GGI[15]. The design of experiment (DOE) used the optimal Latin hypercube method and optimal algorithm used multi island genetic algorithm (MIGA).Genetic algorithm parameters configuration are as follows:Total population size: 100;Sub population number: 10;The number of the island: 20;The total number: 100;Cross probability: 0.8;Migration rate: 0.45;Interval algebra migration: 5;The ratio of the individual to participate competition: 1;The number of elite individuals of the next generation: 1;In the multi-objective optimization process based on Isight, the samples points in the design of experiment were calculated and eliminated the values which were inconsistent with the constraints, and the values which were satisfied the constraints would access to the optimization part and conducted the multi-objective optimization solution. After several genetic iterations, we can obtain the Pareto frontier of the GCI and the GGI.We can obtain the main effect diagram and Pareto diagram between design variables and objective functions from the design of experiment, as shown in Fig.3 to Fig.6. We can get the Pareto frontier between the GCI and the GGI and the feasibility of the design of optimization at the end of the MIGA optimization, in the following Fig.7 and Fig.8.Fig. 3. The main effect between the design variables and GCI Fig. 4. The main effect between the design variables and GGIKinematics Dexterity Analysis and Optimization 9Fig. 5. Pareto diagram of the Global ConditionIndexFig. 6. Pareto diagram of the GlobalGradient IndexFig. 7. Pareto frontier of the global performanceindicesFig. 8. The feasibility of the optimal designAs is shown in the Fig.3 and Fig.4 above, we can see that the design variablesar andbr have a large effect on the global performance indices GCI and GGI,and there is a linear relationship. From Fig.5 and Fig.6,2br, the square of the design br, has a big contribution to GCI approximately sixty percent (the blue denoted thepositive effect). Secondly,ar has a big impact on the performance GGI(the reddenoted the negative effect). The cross terma br r−has a small effect on the GCI. The influence trend of the design variables is substantially the same between GCI and GGI. Distribution from the Pareto solution in Fig.7, we can see that the Global Condition Index and the Global Gradient Index were the conflicting indices. If the GCI increased, simultaneously, the GGI would improve. Multi-objective optimization was different from the single objective optimization, not to obtain a solution of the function. Due to the conflicting of the multi-objective function, the Pareto solution may not be dominant. But if we simply optimize a target, we may make the other performance index poor.P10 G. Cui et al.As can be seen in Fig.8, the feasibility of the optimization design was more than seven, which indicated it was feasible to optimization design. What’s more, the red box represented the recommended design point. In this paper, we choose P point as the optimal solution, and the best variables are revealed in Table 1 (Fig.8).Table 1. Results comparison before and after optimizationa rb r GCI GGI Before optimization0.06 0.15 0.28 0.08 After optimization 0.044 0.1980.46 0.1The result shows that the kinematics dexterity increased, but loss the gradient index. So the designers need to weigh the results according to the specific application.Fig. 9. Local dexterity before optimization when 0.08z = Fig. 10. Local dexterity after optimization when 0.08z =Through the comparisons between Fig.9 and Fig.10, we can see the kinematics dexterity increased obviously after optimization, in the position 0x =,0y =, 0.08z =, has the best dexterity, and the value is close to one. Due to the symmetry of the mechanism, the dexterity was also symmetric distribution in the workspace. By weighing comprehensively, we can choose P point as the design optimization solution.6 Conclusion(1) In this paper, 4-UPS-UPU parallel manipulator with a five-degree of freedom was studied, and the kinematics model and the Jacobian matrix were established. Considering the kinematics performance in the workspace, we introduced the GCI and the GGI as the evaluation criterion of the kinematics dexterity.(2) We established a mathematical model of the global index on the workspace; and we constructed the multi-objective optimization model of 4-UPS-UPU parallel manipulator. In order to obtain the global performance value, we must solve the workspace firstly.Kinematics Dexterity Analysis and Optimization 11(3) Multi-objective optimization research was conducted on the basis of the multidisciplinary design optimization software Isight, adopted the design of experiment and the multi-island genetic algorithm to optimize the 4-UPS-UPU parallel manipulator, and obtained the Pareto solutions.(4) We choose the optimal solution from the number of the solutions in reasonable selection and determined the structural parameters and optimization parameters. The results between before and after optimization show that the kinematics performance improved highly. The methodology in this paper paves the way for providing not only the effective guidance but also a new approach of dimensional synthesis for the optimal design of general parallel mechanisms.References1.Gupta, A., O’Malley, K., Patoglu, V., et al.: Design, Control and performance of RiceWrist: A Force Feedback Wrist Exoskeleton for Rehabilitation and Traning. The International Journal of Robotics Research 27(2), 233–251 (2008)2.Refaat, S., Herve, J., Nahavandi, S.: Two-mode overatrained three-DOFs rotationaltranslational linear motor based parallel-kinematics mechanism for machine tool application. Robotic 25, 461–466 (2007)3.Gosselin, C.: Dexterity indices for planar and spatial robotic manipulators. In: 1990 IEEEInternational Conference Robotics and Automation, vol. 1, pp. 650–655 (1990)4.Zhang, Y., Zhang, H.: Kinematics and Dexterity Analysis of a Novel Pure TranslationalParallel Manipulator. Machine Tool and Hydraulics 08, 13–16 (2010)5.Moreno, H.A., Pamanes, J.A., Wenger, P., et al.: Global optimization of performance of a2PRR parallel manipulator for cooperative tasks. In: 3rd International Conference on Informatics in Control, Automation and Robotics (2006)6.Stan, S., Manic, M., Szep, C., et al.: Performance analysis of 3DOF Delta parallel. In:2011 4th International Conference on Human System Interaction (HSI), Yokohama, Japan, May 19-21 (2011)7.Chen, X., Gao, Q., Zhao, Y.: Research on Dexterity Measures of 4-ups-upu ParallelCoordinate Measuring Machine. Computer Integrated Manufacturing System 18(6) (2012) 8.QI, M.: Dimensional synthesis of 4-UPS/UPU 5-DOF parallel mechanism. Journal ofHarbin Institute of Technology 11(41), 160–164 (2009)9.Yu, J., Liu, X., et al.: The robot mechanism mathematical foundation. Mechanical IndustryPress (2008)10.Xie, B., Zhao, J.: Advances in Robotic Kinematic Dexterity and Indices. MechanicalScience and Technology 08, 1386–1393 (2011)11.Gosselin, C., Angeles, J.: A Global Performance Index for the Kinematic Optimization ofRobotic Manipultors. Journal of Mechanical Design 113(3), 220–226 (1991)12.Gosselin, C., Angeles, J.: The optimum kinematics design of a spherical three degree offreedom parallel manipulator. ASME Journal of Mechanisms, Transmissions, and Automation in Design 111(2), 202–207 (1989)ra-Molina, F.A., Rosario, J.M., et al.: Multi-Objective design of parallel manipulatorusing global indices. The Open Mechanical Engineering Journal 4, 37–47 (2010)14.Cui, G., Zhou, H., Wang, N., et al.: Multi-objective Optimization of 3-UPS-S Parallelmechanism Based on Isight. Journal of Agricultural Machinery 09, 261–266 (2013)15.Stan, S.D., Manic, M., Mătieş, M., Bălan, R.: Evolutionary Approach to Optimal Design of3 DOF Translation Exoskeleton a Medical Parallel Robots. In: HSI 2008, IEEEConference on Hum System Interaction, Krakow, Poland, May 25-27 (2008)。
on the inverse kinematics of redundant manipulators characterization of the self-motion manifolds

1. I n t r o d u c t i o n
A manipulator forward kinematic function, f, is a nonlinear vector function which relates a set of n joint coordinates, q, to a set of m end-effector coordinates:
J L ( q ) = WJT(q)(J(q)WJT(q))-’ is a weighted pseudo-inverse of the manipulator Jacobian matrix which instantaneously minimizes the symmetric weighted quadratic form qTW-’q a t configuration q. The term (I - JL(q) J(q)) projects an arbitrary R. x 1 vector, y, onto the null space of the manipulator Jacobian matrix. Physically, any motion in the null space is an instantaneous motion of the manipulator joints which causes no motion of the end-effector. Many redundancy resolution objectives can be developed as potential functions, and y might be the gradient of the objective function. In the redundant manipulator literature, the inverse solution to (3) is often referred to as the inverse kinematic solution, rather than (2). This paper will investigate and characterize the global set of inverse solutions to (2), rather than the linearized version of (3). Some interpretations of the instantaneous solutions in (4) will be considered, but because of space limitations, practical applications of these ideas to redundancy resolution and path planning have been largely omitted. The global analysis of redundaቤተ መጻሕፍቲ ባይዱt manipulator kinematics is based on a manifold mapping reformulation which considers the aggregate action of the kinematic and inverse kinematic maps on the configuration space manifold. This approach was introduced in [2], and this papers summarizes and corrects some of this work. This approach allows simple topological tools to be applied to the study of manipulator kinematics. Topological methods have been previously used to study manipulator kinematics [3,4,5]. For the particular problems addressed in this paper, few results from topology are needed.
生物大分子结构与功能第14章纤维蛋白剖析
第十四章: 纤维蛋白
fibrous proteins
主动脉
腱
Three most abundant residues in fibrous proteins
存在于丝毛中的a螺旋纤维是有柔性的,它们可以伸展为近两倍的长度, 并且具有弹性以使得当张力被释放时可以恢复到原始的长度。胶原蛋白纤维与之 相比则更具有强度抗拉伸,因而相对具有刚性β折叠片纤维。既具有强度也有柔 性最好的例子是蜘蛛网纤维,某些蜘蛛的网比相同粗细的钢丝还要强,并且同时 还具有柔性,以使得在蛛网上捕捉到昆虫时不被弄破。纤维β折叠片在细胞内也 可由一些可溶性球蛋白的错误折叠产生因而会引起,像阿尔茨海默Alzheimer’s 病和疯牛病prion等疾病。
3, Elastin (弹性蛋白): in ligaments and arterial blood vessels
(韧带)
(动脉血管)
4, Fibroin (丝心蛋白): in silk made by silkworms or spiders
Fibrous Proteins: Structural Materials of Cells and Tissues
蛋白质通常可分为两种截然不同的功能类型,即由排列 为长的蛋白纤维所构成的被动的结构材料和排列为小的致密结 构域的多肽链所组成的细胞机理的活性成分。不管它们在结构 和功能上的差异如何,这些类型的蛋白都含有由环区域所隔开 的a螺旋和β折叠片。在大多数情况下,纤维蛋白含有特殊的重 复氨基酸顺序,这对于它们的特殊三维结构来说是必需的。
自然界的超螺旋结构

自然界的超螺旋结构英文回答:The superhelical structure is a common phenomenon found in nature, especially in biological systems. This structure is characterized by a coiled or twisted shape, which can be observed in molecules such as DNA, proteins, and even some types of polymers.One of the most well-known examples of a superhelical structure is the double helix shape of DNA. The DNA molecule is composed of two strands that twist around each other to form a double helix. This coiled structure is essential for the storage and replication of genetic information.In proteins, the superhelical structure can be observed in the arrangement of alpha helices and beta sheets. These secondary structures can twist and coil around each other, giving rise to complex three-dimensional shapes that arecrucial for the function of the protein.Superhelical structures are also found in some types of polymers, where the molecular chains can twist and coil around each other, leading to unique mechanical and physical properties.Overall, the superhelical structure is a fascinating phenomenon in nature that plays a crucial role in the function and behavior of various biological and chemical systems.中文回答:超螺旋结构是自然界中常见的现象,特别是在生物系统中。
机械设计专业英语
机械设计专业英语圆柱螺旋扭转弹簧cylindroid helical-coil torsion spring圆柱螺旋压缩弹簧cylindroid helical-coil compression spring 圆柱凸轮 cylindrical cam圆柱蜗杆 cylindrical worm圆柱坐标操作器cylindrical coordinate manipulator圆锥螺旋扭转弹簧conoid helical-coil compression spring 圆锥滚子 tapered roller圆锥滚子轴承tapered roller bearing圆锥齿轮机构 bevel gears圆锥角 cone angle原动件 driving link约束 constraint约束条件 constraint condition 约束反力 constraining force跃度 jerk跃度曲线 jerk diagram 运动倒置 kinematic inversion运动方案设计 kinematic precept design运动分析 kinematic analysis运动副 kinematic pair运动构件 moving link运动简图 kinematic sketch运动链 kinematic chain运动失真 undercutting运动设计 kinematic design运动周期 cycle of motion运动综合 kinematic synthesis运转不均匀系数 coefficient of velocity fluctuation运动粘度 kenematic viscosity载荷 load载荷—变形曲线load—deformation curve载荷—变形图load—deformation diagram窄 V 带 narrow V belt毡圈密封 felt ring seal展成法 generating张紧力 tension张紧轮 tension pulley振动 vibration振动力矩 shaking couple振动频率 frequency of vibration 振幅 amplitude of vibration正切机构 tangent mechanism正向运动学direct forward kinematics正弦机构 sine generator; scotch yoke织布机 loom正应力、法向应力 normal stress 制动器 brake直齿圆柱齿轮 spur gear直齿锥齿轮 straight bevel gear 直角三角形 right triangle直角坐标操作器Cartesian coordinate manipulator直径系数 diametral quotient直径系列 diameter series 直廓环面蜗杆 hindley worm直线运动 linear motion直轴 straight shaft质量 mass质心 center of mass执行构件executive link; working link质径积 mass-radius product智能化设计 intelligent design; ID中间平面 mid-plane中心距 center distance中心距变动center distance change中心轮 central gear中径 mean diameter终止啮合点 final contact; end of contact周节 pitch周期性速度波动 periodic speed fluctuation周转轮系 epicyclic gear train肘形机构 toggle mechanism轴 shaft轴承盖 bearing cup轴承合金 bearing alloy轴承座 bearing block轴承高度 bearing height轴承宽度 bearing width轴承内径 bearing bore diameter 轴承寿命 bearing life轴承套圈 bearing ring轴承外径bearing outside diameter轴颈 journal轴瓦、轴承衬 bearing bush轴端挡圈 shaft end ring轴环 shaft collar轴肩 shaft shoulder轴角 shaft angle轴向 axial direction轴向齿廓 axial tooth profile轴向当量动载荷dynamic equivalent axial load 轴向当量静载荷static equivalent axial load轴向基本额定动载荷basic dynamic axial load rating轴向基本额定静载荷basic static axial load rating轴向接触轴承axial contact bearing轴向平面 axial plane轴向游隙axial internal clearance轴向载荷 axial load轴向载荷系数 axial load factor 轴向分力 axial thrust load主动件 driving link主动齿轮 driving gear主动带轮 driving pulley转动导杆机构whitworth mechanism转动副 revolute turning pair转速 swiveling speed ; rotating speed转动关节 revolute joint转轴 revolving shaft转子 rotor转子平衡 balance of rotor装配条件 assembly condition锥齿轮 bevel gear锥顶 common apex of cone锥距 cone distance锥轮 bevel pulley; bevel wheel 锥齿轮的当量直齿轮 equivalent spur gear of the bevel gear锥面包络圆柱蜗杆milled helicoids worm准双曲面齿轮 hypoid gear子程序 subroutine子机构 sub-mechanism自动化 automation自锁 self-locking自锁条件condition of self-locking自由度degree of freedom; mobility 总重合度 total contact ratio总反力 resultant force总效率combined efficiency; overall efficiency组成原理 theory of constitution 组合齿形 composite tooth form 组合安装 stack mounting组合机构 combined mechanism阻抗力 resistance最大盈亏功 maximum difference work between plus and minus work 纵向重合度overlap contact ratio纵坐标 ordinate组合机构 combined mechanism最少齿数 minimum teeth number 最小向径 minimum radius作用力 applied force坐标系 coordinate frame行星轮变速装置 planetary speed changing devices行星轮系 planetary gear train形封闭凸轮机构 positive-drive or form-closed cam mechanism虚拟现实 virtual reality虚拟现实技术virtual reality technology; VRT虚拟现实设计virtual reality design; VRD虚约束redundant or passive constraint许用不平衡量 allowable amount of unbalance许用压力角 allowable pressure angle许用应力allowable stress; permissible stress悬臂结构 cantilever structure 悬臂梁 cantilever beam循环功率流circulating power load旋转力矩 running torque旋转式密封 rotating seal旋转运动 rotary motion 选型 type selection压力 pressure压力中心 center of pressure压缩机 compressor压应力 compressive stress压力角 pressure angle牙嵌式联轴器jaw teeth positive-contact coupling雅可比矩阵 Jacobi matrix摇杆 rocker液力传动 hydrodynamic drive液力耦合器 hydraulic couplers 液体弹簧 liquid spring液压无级变速hydraulic stepless speed changes液压机构 hydraulic mechanism一般化运动链generalized kinematic chain移动从动件reciprocating follower移动副 prismatic pair; sliding pair移动关节 prismatic joint移动凸轮 wedge cam盈亏功 increment or decrement work应力幅 stress amplitude应力集中 stress concentration 应力集中系数 factor of stress concentration应力图 stress diagram应力—应变图stress-strain diagram优化设计 optimal design油杯 oil bottle油壶 oil can油沟密封 oily ditch seal有害阻力 useless resistance有益阻力 useful resistance有效拉力 effective tension有效圆周力effective circle force有害阻力detrimental resistance 余弦加速度运动cosine acceleration or simple harmonic motion预紧力 preload原动机 primer mover圆带 round belt圆带传动 round belt drive圆弧齿厚 circular thickness圆弧圆柱蜗杆 hollow flank worm 圆角半径 fillet radius圆盘摩擦离合器disc friction clutch圆盘制动器 disc brake原动机 prime mover原始机构 original mechanism圆形齿轮 circular gear圆柱滚子 cylindrical roller圆柱滚子轴承cylindrical roller bearing圆柱副 cylindric pair圆柱式凸轮步进运动机构 barrel cylindric cam圆柱螺旋拉伸弹簧cylindroid helical-coil extension spring凸轮 cam凸轮倒置机构inverse cam mechanism凸轮机构 cam ; cam mechanism凸轮廓线 cam profile凸轮廓线绘制layout of cam profile凸轮理论廓线 pitch curve凸缘联轴器 flange coupling图册、图谱 atlas图解法 graphical method推程 rise推力球轴承 thrust ball bearing 推力轴承 thrust bearing退刀槽 tool withdrawal groove 退火 anneal陀螺仪 gyroscopeV 带 V belt外力 external force外圈 outer ring外形尺寸 boundary dimension万向联轴器Hooks coupling ; universal coupling外齿轮 external gear弯曲应力 beading stress弯矩 bending moment腕部 wrist往复移动 reciprocating motion 往复式密封 reciprocating seal 网上设计 on-net design; OND微动螺旋机构differential screw mechanism位移 displacement位移曲线 displacement diagram 位姿pose ; position and orientation稳定运转阶段steady motion period稳健设计 robust design蜗杆 worm蜗杆传动机构 worm gearing蜗杆头数 number of threads蜗杆直径系数diametral quotient蜗杆蜗轮机构 worm and worm gear 蜗杆形凸轮步进机构worm cam interval mechanism蜗杆旋向 hands of worm蜗轮 worm gear涡圈形盘簧 power spring无级变速装置stepless speed changes devices无穷大 infinite系杆 crank arm; planet carrier 现场平衡 field balancing向心轴承 radial bearing向心力 centrifugal force相对速度 relative velocity相对运动 relative motion相对间隙 relative gap象限 quadrant橡皮泥 plasticine细牙螺纹 fine threads销 pin 消耗 consumption小齿轮 pinion小径 minor diameter橡胶弹簧 balata spring修正梯形加速度运动规律modified trapezoidal acceleration motion修正正弦加速度运动规律modified sine acceleration motion斜齿圆柱齿轮 helical gear斜键、钩头楔键 taper key泄漏 leakage谐波齿轮 harmonic gear谐波传动 harmonic driving谐波发生器 harmonic generator 斜齿轮的当量直齿轮 equivalent spur gear of the helical gear 心轴 spindle行程速度变化系数coefficient of travel speed variation行程速比系数advance-toreturn-time ratio行星齿轮装置planetary transmission行星轮 planet gear平衡机 balancing machine平衡品质 balancing quality平衡平面 correcting plane平衡质量 balancing mass平衡重 counterweight平衡转速 balancing speed平面副 planar pair; flat pair 平面机构 planar mechanism平面运动副planar kinematic pair平面连杆机构 planar linkage平面凸轮 planar cam平面凸轮机构planar cam mechanism平面轴斜齿轮 parallel helical gears普通平键 parallel key其他常用机构 other mechanism in common use起动阶段 starting period启动力矩 starting torque气动机构 pneumatic mechanism奇异位置 singular position起始啮合点initial contact ; beginning of contact气体轴承 gas bearing千斤顶 jack嵌入键 sunk key强迫振动 forced vibration切齿深度 depth of cut曲柄 crank曲柄存在条件 Grashoff`s law曲柄导杆机构crank shaper guide-bar mechanism曲柄滑块机构slider-crank or crank-slider mechanism曲柄摇杆机构crank-rocker mechanism曲齿锥齿轮 spiral bevel gear曲率 curvature曲率半径 radius of curvature曲面从动件curved-shoe follower曲线拼接 curve matching曲线运动 curvilinear motion曲轴 crank shaft驱动力 driving force驱动力矩 driving moment torque 全齿高 whole depth权重集 weight sets球 ball球面滚子 convex roller球轴承 ball bearing球面副 spheric pair球面渐开线 spherical involute 球面运动 spherical motion球销副 sphere-pin pair球坐标操作器 polar coordinate manipulator燃点 spontaneous ignition热平衡 heat balance; thermal equilibrium人字齿轮 herringbone gear冗余自由度 redundant degree of freedom柔轮 flexspline柔性冲击 flexible impulse; soft shock柔性制造系统flexible manufacturing system; FMS柔性自动化 flexible automation 润滑油膜 lubricant film润滑装置 lubrication device润滑 lubrication润滑剂 lubricant三角形花键 serration spline三角形螺纹 V thread screw三维凸轮three-dimensional cam三心定理 Kennedy`s theorem砂轮越程槽grinding wheel groove砂漏 hour-glass少齿差行星传动 planetary drivewith small teeth difference设计方法学 design methodology 设计变量 design variable设计约束 design constraints深沟球轴承deep groove ball bearing生产阻力 productive resistance 升程 rise升距 lift螺旋角 helix angle螺旋线 helix ;helical line绿色设计 green design ; design for environment马耳他机构Geneva wheel ; Geneva gear马耳他十字 Maltese cross脉动无级变速pulsating stepless speed changes脉动循环应力fluctuating circulating stress脉动载荷 fluctuating load铆钉 rivet 迷宫密封 labyrinth seal密封 seal密封带 seal belt密封胶 seal gum密封元件 potted component密封装置 sealing arrangement面对面安装face-to-face arrangement面向产品生命周期设计design for product`s life cycle; DPLC 名义应力、公称应力nominal stress模块化设计 modular design; MD 模块式传动系统 modular system 模幅箱 morphology box模糊集 fuzzy set模糊评价 fuzzy evaluation模数 module摩擦 friction摩擦角 friction angle摩擦力 friction force摩擦学设计 tribology design; TD摩擦阻力 frictional resistance 摩擦力矩 friction moment摩擦系数coefficient of friction摩擦圆 friction circle磨损 abrasion ;wear; scratching 末端执行器 end-effector目标函数 objective function耐腐蚀性 corrosion resistance 耐磨性 wear resistance挠性机构mechanism with flexible elements挠性转子 flexible rotor内齿轮 internal gear内齿圈 ring gear内力 internal force内圈 inner ring能量 energy能量指示图 viscosity逆时针counterclockwise or anticlockwise啮出 engaging-out 啮合 engagement; mesh; gearing 啮合点 contact points啮合角 working pressure angle 啮合线 line of action啮合线长度length of line of action啮入 engaging-in牛头刨床 shaper凝固点freezing point; solidifying point扭转应力 torsion stress扭矩 moment of torque扭簧 helical torsion spring诺模图 NomogramO 形密封圈密封 O ring seal盘形凸轮 disk cam盘形转子 disk-like rotor抛物线运动 parabolic motion疲劳极限 fatigue limit疲劳强度 fatigue strength偏置式 offset偏心距 offset distance偏心率 eccentricity ratio偏心质量 eccentric mass偏距圆 offset circle偏心盘 eccentric偏置滚子从动件offset roller follower偏置尖底从动件offset knife-edge follower偏置曲柄滑块机构offset slider-crank mechanism拼接 matching评价与决策evaluation and decision频率 frequency平带 flat belt平带传动 flat belt driving平底从动件 flat-face follower 平底宽度 face width平分线 bisector平均应力 average stress平均中径 mean screw diameter平均速度 average velocity 平衡 balance可靠度 degree of reliability可靠性 reliability可靠性设计 reliability design; RD空气弹簧 air spring空间机构 spatial mechanism空间连杆机构 spatial linkage空间凸轮机构 spatial cam空间运动副spatial kinematic pair空间运动链spatial kinematic chain空转 idle宽度系列 width series框图 block diagram雷诺方程Reynolds‘s equation离心力 centrifugal force离心应力 centrifugal stress离合器 clutch离心密封 centrifugal seal理论廓线 pitch curve理论啮合线 theoretical line of action隶属度 membership力 force力多边形 force polygon力封闭型凸轮机构force-drive or force-closed cam mechanism力矩 moment力平衡 equilibrium力偶 couple力偶矩 moment of couple连杆 connecting rod; coupler连杆机构 linkage连杆曲线 coupler-curve连心线 line of centers链 chain链传动装置 chain gearing链轮 sprocket ; sprocket-wheel ; sprocket gear ; chain wheel联组 V 带 tight-up V belt联轴器coupling ; shaft coupling 两维凸轮 two-dimensional cam临界转速 critical speed六杆机构 six-bar linkage龙门刨床 double Haas planer轮坯 blank轮系 gear train螺杆 screw螺距 thread pitch螺母 screw nut螺旋锥齿轮 helical bevel gear 螺钉 screws螺栓 bolts螺纹导程 lead螺纹效率 screw efficiency螺旋传动 power screw螺旋密封 spiral seal螺纹 thread of a screw螺旋副 helical pair螺旋机构 screw mechanism基本额定寿命 basic rating life 基于实例设计case-based design;CBD基圆 base circle基圆半径 radius of base circle 基圆齿距 base pitch基圆压力角pressure angle of base circle基圆柱 base cylinder基圆锥 base cone急回机构quick-return mechanism急回特性quick-return characteristics急回系数advance-to return-time ratio急回运动 quick-return motion棘轮 ratchet棘轮机构 ratchet mechanism棘爪 pawl极限位置extreme or limiting position极位夹角crank angle between extreme or limiting positions 计算机辅助设计 computer aided design; CAD计算机辅助制造 computer aided manufacturing; CAM计算机集成制造系统computer integrated manufacturing system; CIMS计算力矩factored moment; calculation moment计算弯矩calculated bending moment加权系数 weighting efficient加速度 acceleration加速度分析acceleration analysis加速度曲线acceleration diagram尖点 pointing; cusp尖底从动件 knife-edge follower 间隙 backlash间歇运动机构intermittent motion mechanism减速比 reduction ratio减速齿轮、减速装置reduction gear减速器 speed reducer减摩性 anti-friction quality渐开螺旋面 involute helicoid渐开线 involute渐开线齿廓 involute profile渐开线齿轮 involute gear渐开线发生线 generating line of involute渐开线方程 involute equation渐开线函数 involute function渐开线蜗杆 involute worm渐开线压力角 pressure angle of involute渐开线花键 involute spline简谐运动 simple harmonic motion 键 key键槽 keyway交变应力 repeated stress交变载荷 repeated fluctuating load 交叉带传动 cross-belt drive交错轴斜齿轮crossed helical gears胶合 scoring角加速度 angular acceleration 角速度 angular velocity角速比 angular velocity ratio 角接触球轴承angular contact ball bearing角接触推力轴承 angular contact thrust bearing角接触向心轴承 angular contact radial bearing角接触轴承angular contact bearing铰链、枢纽 hinge校正平面 correcting plane接触应力 contact stress接触式密封 contact seal阶梯轴 multi-diameter shaft结构 structure结构设计 structural design截面 section节点 pitch point节距 circular pitch; pitch of teeth节线 pitch line节圆 pitch circle节圆齿厚thickness on pitch circle节圆直径 pitch diameter节圆锥 pitch cone节圆锥角 pitch cone angle解析设计 analytical design紧边 tight-side紧固件 fastener径节 diametral pitch径向 radial direction径向当量动载荷dynamic equivalent radial load径向当量静载荷static equivalent radial load径向基本额定动载荷basic dynamic radial load rating 径向基本额定静载荷basic static radial load tating径向接触轴承radial contact bearing径向平面 radial plane径向游隙radial internal clearance径向载荷 radial load径向载荷系数 radial load factor 径向间隙 clearance静力 static force静平衡 static balance静载荷 static load静密封 static seal局部自由度passive degree of freedom矩阵 matrix矩形螺纹 square threaded form 锯齿形螺纹 buttress thread form 矩形牙嵌式离合器square-jaw positive-contact clutch绝对尺寸系数absolutedimensional factor绝对运动 absolute motion绝对速度 absolute velocity均衡装置load balancing mechanism抗压强度 compression strength 开口传动 open-belt drive开式链 open kinematic chain开链机构 open chain mechanism高度系列 height series功 work工况系数 application factor工艺设计 technological design 工作循环图working cycle diagram工作机构 operation mechanism工作载荷 external loads工作空间 working space工作应力 working stress工作阻力 effective resistance 工作阻力矩effective resistance moment 公法线 common normal line公共约束 general constraint公制齿轮 metric gears功率 power功能分析设计 function analyses design共轭齿廓 conjugate profiles共轭凸轮 conjugate cam构件 link鼓风机 blower固定构件 fixed link; frame固体润滑剂 solid lubricant关节型操作器jointed manipulator惯性力 inertia force惯性力矩moment of inertia ;shaking moment惯性力平衡 balance of shaking force惯性力完全平衡 full balance of shaking force惯性力部分平衡 partial balanceof shaking force惯性主矩resultant moment of inertia惯性主失resultant vector of inertia冠轮 crown gear广义机构 generation mechanism 广义坐标generalized coordinate轨迹生成 path generation轨迹发生器 path generator滚刀 hob滚道 raceway滚动体 rolling element滚动轴承 rolling bearing滚动轴承代号rolling bearing identification code滚针 needle roller滚针轴承 needle roller bearing 滚子 roller滚子轴承 roller bearing滚子半径 radius of roller 滚子从动件 roller follower滚子链 roller chain滚子链联轴器double roller chain coupling滚珠丝杆 ball screw滚柱式单向超越离合器roller clutch过度切割 undercutting函数发生器 function generator 函数生成 function generation含油轴承 oil bearing耗油量 oil consumption耗油量系数oil consumption factor赫兹公式 H. Hertz equation合成弯矩resultant bending moment合力 resultant force合力矩resultant moment of force黑箱 black box横坐标 abscissa互换性齿轮interchangeable gears花键 spline滑键、导键 feather key滑动轴承 sliding bearing滑动率 sliding ratio滑块 slider环面蜗杆 toroid helicoids worm 环形弹簧 annular spring缓冲装置shocks; shock-absorber灰铸铁 grey cast iron回程 return回转体平衡 balance of rotors混合轮系 compound gear train 积分 integrate机电一体化系统设计mechanical-electrical integration system design机构 mechanism机构分析 analysis of mechanism 机构平衡 balance of mechanism 机构学 mechanism机构运动设计 kinematic design of mechanism机构运动简图 kinematic sketch of mechanism机构综合 synthesis of mechanism 机构组成constitution of mechanism机架 frame; fixed link机架变换 kinematic inversion机器 machine机器人 robot机器人操作器 manipulator机器人学 robotics技术过程 technique process技术经济评价technical and economic evaluation技术系统 technique system机械 machinery机械创新设计mechanical creation design; MCD机械系统设计 mechanical systemdesign; MSD机械动力分析 dynamic analysis of machinery机械动力设计 dynamic design of machinery机械动力学dynamics of machinery机械的现代设计 modern machine design机械系统 mechanical system机械利益 mechanical advantage 机械平衡 balance of machinery 机械手 manipulator机械设计machine design; mechanical design机械特性 mechanical behavior机械调速mechanical speed governors机械效率 mechanical efficiency 机械原理 theory of machines and mechanisms机械运转不均匀系数 coefficient of speed fluctuation机械无级变速mechanical stepless speed changes基础机构 fundamental mechanism 端面 transverse plane端面参数 transverse parameters 端面齿距transverse circular pitch端面齿廓transverse tooth profile端面重合度 transverse contact ratio端面模数 transverse module端面压力角 transverse pressure angle锻造 forge对称循环应力symmetry circulating stress对心滚子从动件radial or in-line roller follower对心直动从动件radial or in-line translating follower对心移动从动件radial reciprocating follower对心曲柄滑块机构in-line slider-crank or crank-slider mechanism多列轴承 multi-row bearing多楔带 poly V-belt多项式运动规律polynomial motion多质量转子 rotor with several masses惰轮 idle gear额定寿命 rating life额定载荷 load ratingII 级杆组 dyad发生线 generating line发生面 generating plane法面 normal plane法面参数 normal parameters法面齿距 normal circular pitch 法面模数 normal module法面压力角normal pressure angle法向齿距 normal pitch法向齿廓 normal tooth profile 法向直廓蜗杆straight sided normal worm法向力 normal force反馈式组合 feedback combining 反向运动学inverse or backward kinematics反转法 kinematic inversion反正切 Arctan范成法 generating cutting仿形法 form cutting方案设计、概念设计concept design; CD防振装置 shockproof device飞轮 flywheel飞轮矩 moment of flywheel非标准齿轮 nonstandard gear非接触式密封 non-contact seal 非周期性速度波动aperiodic speed fluctuation非圆齿轮 non-circular gear粉末合金 powder metallurgy分度线 reference line; standard pitch line分度圆reference circle; standard cutting pitch circle 分度圆柱导程角 lead angle at reference cylinder分度圆柱螺旋角 helix angle at reference cylinder分母 denominator分子 numerator分度圆锥reference cone; standard pitch cone分析法 analytical method封闭差动轮系planetary differential复合铰链 compound hinge复合式组合 compound combining 复合轮系 compound or combined gear train复合平带 compound flat belt 复合应力 combined stress复式螺旋机构Compound screw mechanism复杂机构 complex mechanism杆组 Assur group干涉 interference刚度系数 stiffness coefficient 刚轮 rigid circular spline钢丝软轴 wire soft shaft刚体导引机构body guidance mechanism刚性冲击 rigid impulse shock刚性转子 rigid rotor刚性轴承 rigid bearing刚性联轴器 rigid coupling高度系列 height series高速带 high speed belt高副 higher pair格拉晓夫定理 Grashoff`s law根切 undercutting公称直径 nominal diameter阿基米德蜗杆 Archimedes worm安全系数 safety factor; factor of safety安全载荷 safe load凹面、凹度 concavity扳手 wrench板簧 flat leaf spring半圆键 woodruff key变形 deformation摆杆 oscillating bar摆动从动件oscillating follower摆动从动件凸轮机构cam with oscillating follower摆动导杆机构oscillating guide-bar mechanism摆线齿轮 cycloidal gear摆线齿形cycloidal tooth profile摆线运动规律 cycloidal motion 摆线针轮 cycloidal-pin wheel包角 angle of contact保持架 cage 背对背安装back-to-back arrangement背锥 back cone ; normal cone 背锥角 back angle背锥距 back cone distance比例尺 scale比热容 specific heat capacity 闭式链 closed kinematic chain 闭链机构 closed chain mechanism 臂部 arm变频器 frequency converters变频调速 frequency control of motor speed变速 speed change变速齿轮 change gear ; change wheel变位齿轮 modified gear变位系数modification coefficient标准齿轮 standard gear标准直齿轮 standard spur gear 表面质量系数 superficial massfactor表面传热系数surface coefficient of heat transfer表面粗糙度 surface roughness并联式组合combination in parallel并联机构 parallel mechanism并联组合机构 parallel combined mechanism并行工程concurrent engineering并行设计 concurred design; CD 不平衡相位phase angle of unbalance不平衡 imbalance or unbalance 不平衡量 amount of unbalance不完全齿轮机构intermittent gearing波发生器 wave generator波数 number of waves补偿 compensation参数化设计parameterization design; PD残余应力 residual stress操纵及控制装置operation control device槽轮 Geneva wheel槽轮机构Geneva mechanism ;Maltese cross槽数 Geneva numerate槽凸轮 groove cam侧隙 backlash差动轮系differential gear train差动螺旋机构differential screw mechanism差速器 differential常用机构conventional mechanism; mechanism in common use车床 lathe承载量系数bearing capacity factor承载能力 bearing capacity成对安装 paired mounting尺寸系列 dimension series齿槽 tooth space齿槽宽 spacewidth齿侧间隙 backlash齿顶高 addendum齿顶圆 addendum circle齿根高 dedendum齿根圆 dedendum circle齿厚 tooth thickness齿距 circular pitch齿宽 face width齿廓 tooth profile齿廓曲线 tooth curve齿轮 gear齿轮变速箱 speed-changing gear boxes齿轮齿条机构 pinion and rack齿轮插刀pinion cutter; pinion-shaped shaper cutter齿轮滚刀 hob ;hobbing cutter齿轮机构 gear 齿轮轮坯 blank齿轮传动系 pinion unit齿轮联轴器 gear coupling齿条传动 rack gear齿数 tooth number齿数比 gear ratio齿条 rack齿条插刀rack cutter; rack-shaped shaper cutter齿形链、无声链 silent chain齿形系数 form factor齿式棘轮机构tooth ratchet mechanism插齿机 gear shaper重合点 coincident points重合度 contact ratio冲床 punch传动比transmission ratio; speed ratio传动装置 gearing; transmission gear传动系统 driven system传动角 transmission angle传动轴 transmission shaft串联式组合combination in series串联式组合机构 series combined mechanism串级调速 cascade speed control 创新 innovation ; creation创新设计 creation design垂直载荷、法向载荷 normal load 唇形橡胶密封 lip rubber seal磁流体轴承magnetic fluid bearing从动带轮 driven pulley从动件 driven link; follower从动件平底宽度width of flat-face从动件停歇 follower dwell从动件运动规律 follower motion 从动轮 driven gear粗线 bold line粗牙螺纹 coarse thread 大齿轮 gear wheel打包机 packer打滑 slipping带传动 belt driving带轮 belt pulley带式制动器 band brake单列轴承 single row bearing单向推力轴承 single-direction thrust bearing单万向联轴节 single universal joint单位矢量 unit vector当量齿轮 equivalent spur gear; virtual gear当量齿数equivalent teeth number; virtual number of teeth 当量摩擦系数equivalent coefficient of friction当量载荷 equivalent load刀具 cutter导数 derivative倒角 chamfer导热性 conduction of heat导程 lead导程角 lead angle等加等减速运动规律parabolic motion; constant acceleration and deceleration motion等速运动规律uniform motion; constant velocity motion等径凸轮 conjugate yoke radial cam等宽凸轮 constant-breadth cam 等效构件 equivalent link等效力 equivalent force等效力矩 equivalent moment of force等效量 equivalent等效质量 equivalent mass等效转动惯量 equivalent moment of inertia等效动力学模型dynamically equivalent model底座 chassis 低副 lower pair点划线 chain dotted line疲劳点蚀 pitting垫圈 gasket垫片密封 gasket seal碟形弹簧 belleville spring顶隙 bottom clearance定轴轮系 ordinary gear train; gear train with fixed axes动力学 dynamics动密封 kinematical seal动能 dynamic energy动力粘度 dynamic viscosity动力润滑 dynamic lubrication动平衡 dynamic balance动平衡机dynamic balancing machine动态特性dynamic characteristics动态分析设计 dynamic analysis design动压力 dynamic reaction动载荷 dynamic load。
一种可移动多媒体讲台的结构设计研究
一种可移动多媒体讲台的结构设计研究杨辉(常州工学院机械与车辆工程学院,江苏常州213002)摘要:基于实验室、机房、小型会议室等场所的教学及研讨需求,根据人机工程学原理,研发了一款可移动的多媒体讲台。
该讲台具有台面扩展、高度升降、投影仪抽屉伸出及其托板举升等功能,使用者可根据自身需要及使用场合,自行调整讲台的位置、高度、台面大小及投影仪托板高度。
讲台的整体升降结构及投影仪托板举升结构的运动仿真分析及实物演示结果表明,讲台中各结构设计合理,使用安全、可靠。
关键词:多媒体讲台;结构设计;运动仿真分析中图分类号:TH112.1文献标志码:A文章编号:员园园圆原圆猿猿猿(圆园员8)08原园046原园3 Research on Structural Design of a Movable Multimedia PlatformYANG Hui(School of Mechanical&Vehicle Engineering,Changzhou Institute of Technology,Changzhou213002,China)Abstract:Based on the teaching and studying requirements of laboratories,computer rooms and small conference rooms,a movable multimedia platform is developed according to the principles of ergonomics.The platform has a surface extension,height lifting,projector drawer protruding and its supporting plate lifting and other functions,the user can adjust the location,height,table size and projector bracket height of the platform according to their own needs and occasions.Through the analysis and demonstration of the whole lifting mechanism of the platform and the lifting mechanism of the projector bracket,it is proved that the design of the structure in the platform is reasonable, safe and reliable.Keywords:multimedia platform;structural design;kinematics simulation analysis0引言多媒体教学以其图文并茂的演示效果而受到师生的喜爱,并已发展成主要的授课模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a r X i v :a s t r o -p h /0308087v 1 6 A u g 2003Astronomy &Astrophysics manuscript no.zickgraf February 2,2008(DOI:will be inserted by hand later)Kinematical structure of the circumstellar environments ofgalactic B[e]-type stars ⋆F.-J.ZickgrafHamburger Sternwarte,Gojenbergsweg 112,21029Hamburg,GermanyReceived date;accepted dateAbstract.High resolution line profiles are presented for selected forbidden and permitted emission lines of a sample of galactic B[e]-type stars.The spectral resolution corresponds to 5-7km s −1with the exception of some line profiles which were observed with a resolution of 9-13km s −1.All H αprofiles are characterized by a narrow split or single emission component with a width of ∼150−250km s −1(FWHM)and broad wings with a full width of ∼1000−2000km s −1.The H αprofiles can be classified into three groups:double-peaked profiles representing the majority,single-peaked emission-line profiles,and normal P Cygni-type profiles.Likewise,the forbidden lines exhibit in most cases double-peaked profiles.In particular,the majority of starsshows split [O I ]λ6300˚A.Double-peaked profiles are also found in several stars for [N II ]λ6583˚A and [Fe II ]λ7155˚A although these lines in many stars exhibit single-peaked emission profiles.The split forbidden line profiles have peak separations of as little as ∼10km s −1,and were therefore only discernible for the first time in the high-resolution spectra.The ratio of violet to red emission peak intensities,V /R ,is predominantly smaller or equal to 1.Theoretical profiles were calculated for the optically thin case.A latitude-dependent stellar wind with a radial expansion and a velocity decreasing from the pole to the equator was adopted.This configuration can produce split line profiles if viewed under some angle with respect to the line of sight.In addition an equatorial dust ring with various optical depths was assumed.It can explain line asymmetries observed in some stars.Moreover,the V /R ratios can be understood in terms of this model.The comparison of the observed line profiles with the models thus confirms the assumption of disk-like line-formation regions as commonly adopted for B[e]-type stars.Key words.Stars:circumstellar matter –Stars:early-type –Stars:emission-line,Be –Stars:mass-loss1.IntroductionThe class of B[e]-type stars is characterized by the B[e]phe-nomenon (Lamers et al.1998).This term summarizes the pres-ence of strong Balmer emission lines,narrow permitted and forbidden low-excitation emission lines of Fe II ,[Fe II ]and [O I ],and in particular a strong near to mid-IR excess.It is attributed to hot circumstellar dust (T dust ∼1000K)and is a distinguishing characteristic with respect to other classes of peculiar emission-line stars.The presence of dust requires re-gions of high density and a temperature low enough to allow dust condensation.A recent review of the properties of this still enigmatic class of emission-line stars was given by Zickgraf (1998)during the first workshop dedicated entirely to this type of stars (Hubert &Jaschek 1998).It was shown that although B[e]-type stars share the mentioned properties,indicating very similar physical conditions in their circumstellar environments with regard to temperature,density,and velocity,they form by2 F.-J.Zickgraf:Circumstellar environments of galactic B[e]-type starsin the Magellanic Clouds(MCs).These observations strongly suggested that the stellar winds can be described by a two-component model.In this picture a cool and dense equatorial wind emerging from a single star is responsible for the for-mation of the narrow low-excitation emission lines.It is also supposed to be the site of dust formation.The polar region is dominated by a hot and fast expanding OB star wind with the high wind velocities observed normally for stars of this type.A similar model had been proposed earlier by Swings(1973a) for the galactic B[e]-type star HD45677also based on spectro-scopic observations.In contrast to the post-main sequence MC sgB[e]s it seems to be a(near)main-sequence object.Likewise, the pre-main sequence Herbig Ae/Be stars are supposed to pos-sess circumstellar disks.Disk-like circumstellar environments could also be caused by binarity.Apart from objects belonging to the subclass of symB[e]several B[e]stars have in fact been shown to be com-ponents of a binary system.In the SMC two B[e]supergiants, Hen S18and R4,were found to possess lower mass com-panions(Zickgraf et al.1989,1996).Likewise,in the Milky Way a couple of B[e]stars were found to be binaries,e.g. MWC623(Zickgraf&Stahl1989),AS381(Miroshnichenko et al.2002a),and CI Cam(=MWC84).Further instances are possibly MWC349A(Hofmann et al.2002)and MWC342 (Miroshnichenko&Corporon1999).It is,however,not clear whether in these objects the B[e]phenomenon itself is actually caused by their binary nature.For some objects this seems not to be the case.In Hen S18,R4,and MWC623the B[e]phe-nomenon can be ascribed to the B star component in the binary systems.These B[e]stars behave like single stars(Zickgraf et al.1989,1996,Zickgraf2001).AS381on the other hand shows signs of mass transfer suggesting that interaction could play a role in the occurence of the B[e]phenomenon in this object(Miroshnichenko et al.2002a).At this time the role of binarity is thus controversial.Spectroscopic studies showed that the low-excitation lines attributed to the disks are narrow and thus indicative for low wind velocities in the line forming region.Typically, line widths(FWHM)of the order of less than∼100km s−1 to300km s−1are observed(e.g.Swings&Andrillat1981, Zickgraf et al.1986).Given the early spectral types of the un-derlying stars such small wind velocities are unusual.In the case of stars viewed edge-on the direct investiga-tion of the velocity structure of the disk winds is possible by studying absorption lines formed in the disk.This method was used by Zickgraf et al.(1996)to study three B[e]supergiants in the MCs using satellite UV spectroscopy.The observations of UV resonance lines showed that the disk winds are in fact very slow,at least in the case of massive supergiants.The expansion velocities measured were of the order of70-100km s−1,i.e. typically a factor of10less than usually observed for stars of similar spectral type.This may also hold for members of other B[e]star classes.For viewing angles deviating from edge-on one can make use of the low-excitation emission lines to study the kinematics of the disk winds.Of particular interest are lines from forbidden transitions because they are optically thin.Therefore radiation transfer does not complicate the interpretation of the line in-Table1.Observed sample of B[e]-type stars.References forspectral types are:WS85=Wolf&Stahl(1985),McG88= McGregor et al.(1988),WW89=Winkler&Wolf(1989), LeB89=Le Bertre et al.(1989),Th´e94=Th´e et al.(1994), Sw73=Swings(1973a),C99=Clark et al.(1999),Lei77= Leibowitz1977),L98=Lamers et al.(1998),Isr96=Israelian et al.(1996),Drew97=Drew et al.(1997).star spec.class.references tensities and profiles.Furthermore,the forbidden lines should form at a large distance from the central star.Hence,in the case of a radially accelerated outflow(as e.g.the usually adopted β-type velocity law)the radial velocity component in the line forming region should have reached the terminal wind speed. Because of the small velocities involved the investigation of the emission-line profiles requires high spectral resolution.If one aims at a resolution of about1/10of the terminal velocity a spectral resolution of about∼5−10km s−1is necessary for the wind velocities measured e.g.by Zickgraf et al.(1996)forB[e]supergiants.In order to study the disk winds using emission-line pro-files a sample of galactic B[e]-type stars listed in Table1was observed with high spectral resolution.In Sect.2the observa-tions are described.The observed line profiles are described in Sect.3.The density conditions in the line formation region of the forbidden lines are discussed in Sect.4.The role of rotation and expansion is investigated in Sect.5.In Sect.6model cal-culations of optically thin line profiles are presented and com-pared with the observed lines.Finally,conclusions are given in Sect.7.The Appendix contains the observational data in Sects.A and B,and remarks on individual stars in Sect.C.An atlas of the high-resolution spectra is presented in Sect.D1.F.-J.Zickgraf:Circumstellar environments of galactic B[e]-type stars3 Table3.Lines observed with CES in1986(+)and in1988(×).star Hα+[N II][O I][Fe II][Fe II]Fe II Fe II He I+Na I Dλ6300˚Aλ7155˚Aλ4287˚Aλ6456˚Aλ4549/56˚Aλ5876˚ATable4.Lines observed at Calar Alto Observatory.Coud´e observations with a resolution of45000are indicated by the letter”h”, coud´e observations obtained with the lower resolution of23000are indicated by”m”.Supplementary observations with FOCES are denoted by the letter“F”.star Hα+[N II][N II][O I][Fe II]He I+Na I D He Iλ6583˚Aλ6300˚Aλ7155˚Aλ5876˚A&λ6678˚A2.Observations and data reductionThe spectroscopic observations were carried out in1986and1988with the Coud´e Echelle Spectrometer(CES)at the1.4mCAT at ESO,La Silla,and in1987with the coud´e spec-trograph at the2.2m telescope at the Centro AstronomicoHispano Aleman(CAHA)on Calar Alto,Spain.For a fewstars with incomplete coud´e data the observations were sup-plemented by echelle spectra obtained with FOCES at CalarAlto Observatory in June2000and February2002.The journalof observations is given in Table2.Due to the small spectral coverage of about≃30−60˚Aprovided by the coud´e spectrographs strong emission linescharacteristic for B[e]-type stars were selected and the ob-served wavelength ranges adjusted around these lines.In Tabs.3and4the observed lines are listed for each studied object.During the1987observing run on Calar Alto the northern B[e]-type star MWC623was included in the sample.The resultson this star have been presented already by Zickgraf&Stahl(1989)and Zickgraf(2001)and are therefore omitted here.The CES spectra were collected during two campaigns inNovember1986and March1988.The short camera of thespectrograph was equipped with a RCA CCD(ESO CCD#8,4 F.-J.Zickgraf:Circumstellar environments of galactic B[e]-type starsTable2.Journal of observations.date wavel.range spectral res.instrument[˚A]R=λ/∆λchip with24µm pixel size.With a diaphragm diameter of 200µm and an entrance slit width of180µm a spectral resolu-tion of34000was achieved,i.e.9km s−1.A full discussion of the FOCES spectra will be given elsewhere(Zickgraf2003,in preparation).Here only the lines observed also with the coud´e spectrographs will be considered.During all observing campaigns wavelength calibration was obtained with Th-Ar lamps.Forflatfielding built-in lamps were used.The coud´e spectra were reduced by application of standard procedures(bias subtraction,flat-fielding,wavelength calibration,normalization)of the ESO-MIDAS image process-ing software package,context longslit.For the FOCES data the ESO-MIDAS context echelle was used.All spectra werefinally rebinned to heliocentric wavelengths.The spectra in the red spectral region are strongly affected by narrow telluric absorption features.To correct for these lines,the normalized spectra were divided by the normalized spectrum of a hot comparison star with a line free continuum or with possible photospheric lines removed during the normal-ization procedure.For the Hαlines the correction spectrum was created from the object spectra themselves.First each spec-trum was smoothed.Then the original spectrum was divided by the smoothed spectrum.Thefinal correction spectrum was then created by averaging several of these individual spectra observed during the same night as the spectrum to be corrected.The observed spectral sections are displayed in the Appendix in Figs.D.1to D.8together with remarks on the in-dividual objects in Sect.C.For Hαsee Fig.1.3.Observed line profilesIn the following the observed characteristics of the line profiles are summarized.Table A.1in the Appendix lists relevant line parameters.Measurements of heliocentric radial velocities are also listed in the Appendix in Table B.1.The profiles of Hα, of He I emission lines,and of the forbidden lines rebinned on a velocity scale are displayed in Figs.13and2a,b.The line profiles can be categorized into four groups:–group1:normal P Cygni-type line profiles with an absorp-tion component reaching below the continuum on the violet side of the profile and an emission component on the red side,–group2:single-peaked pure emission lines without absorp-tion components,–group3:double-peaked emission lines with a central or al-most central absorption component,or at least an intensity dip on one of the lineflanks,–group4:absorption lines.These profile groups correspond to Beals types I,V,III,and VII-VIII,respectively,defined by Beals(1955).The profile types of the observed lines are summarized in Table5.3.1.HαprofilesA general characteristic of all Hαprofiles displayed in Fig.1is that they exhibit a narrow single or split emission component with a full width at half maximum(FWHM)of about3-5˚A, i.e.∼150−250km s−1,and broad wings on both sides of the emission component extending up to typically∼20−25˚A,i.e.∼1000km s−1.These wings are generally ascribed to electron scattering(e.g.Zickgraf et al.1986).Only one star,CPD−52◦9243,shows a P Cygni profile which resembles the“normal”(group1)profile type.Hen485 in1988and MWC1055may also be classed with group1,al-though the absorption components do not reach below the con-tinuum level.The Hαprofiles of four stars,MWC84,MWC137, MWC297,and Hen230,fall into group2,which exhibits pure emission line profiles.The FWHM is of the order of3-5˚A. Note,however,that the lines are not symmetric.The asymme-try is particularly pronounced in the case of MWC84.Most of the investigated stars belong to group3exhibiting double-peaked Hαemission lines.In all of the eleven cases of this group the blue emission peak is weaker than the red peak. In no case the central absorption components reaches below the continuum level.For the peculiar line profiles of HD45677and MWC645see Sect.C.For several stars Hαwas observed more than once.The profiles are plotted in Fig.1:MWC137in1987(solid line) and in2002(dashed line);MWC342in1987(solid line)and in2000(dashed line);MWC939in1987(solid line)and1988 (dashed line),the profile observed in2000is indistinguish-able that of1988;MWC1055in1987(solid line)and2000 (dashed line);HD87643in1986(solid line)and1988(dashed line);Hen485in1986(solid line)and1988(dashed line).ForHen485(see text).malized to the peakflux.From bottom to top the profiles of[O I]λ6300A,[Fe II]λ7155A,[N II]λ6583A,and[S III]λ6312A are plotted with shifts in relative intensity of0,0.75,1.5,and2.25,respectively.the line observed in2002is shown.3.2.2.[N II]linesThe wavelength region around[N II]λ6583˚A is displayed in Fig.D.2.In two stars,CPD−52◦9243and HD87643,the [N II]line is absent.The lines visible in the spectra of these stars aroundλ6585˚A are probably due to Fe IIλ6586.69˚A. Heliocentric radial velocities are v rad=−72km s−1for CPD−52◦9243and v rad=−18km s−1for HD87643.In MWC1055[N II]is only weakly discernible.The majority of stars,however,exhibits clearly visible,in many cases strong, [N II]λ6583˚A emission.Eight stars show double-peak profiles. Hen1191shows a sloping line top inclined towards the red side similar to the[O I]line of Hen230,however with a weak peak on the blue edge.Due to this feature the line was classified type 3.Eight stars exhibit single-peaked emission lines.However,in two of these cases,respectively,the profiles were observed with the lower resolution of23000and34000.They are labelled “e”and”f”in Table5.Note that each of these stars shows a double-peaked(type3)[O I]profile.3.2.3.[Fe II]The spectral section with[Fe II]λ7155˚A is shown in Fig.D.3. Note for that CD−24◦5721the forbiddden lines[Fe II]λλ4287, 4276˚A were observed instead of the red line(Fig.D.4).In five cases the[Fe II]profiles are double-peaked similar to[O I]. However,contrary to[O I]the majority of objects,i.e.10,ex-hibits single-peaked profiles,2of them on a resolution level of 9km s−1.3.2.4.[S III]linesThe[S III]λ6312˚A lines are displayed in Fig.D.1.Only four stars exhibit this higher-excitation emission line,i.e.MWC17, MWC84,MWC137,and MWC349A.In MWC137it is very weak and not much can be said about its profile.The[S III] line of MWC84is also weak.The strongest[S III]was found in MWC349A.3.2.5.Fe II linesFor only half of the sample permitted Fe II lines were observed, mostly Fe IIλ6456˚A,but also Fe II lines around4550˚A for a few stars instead.The wavelength region around Fe IIλ6456˚A is displayed in Fig.D.5.Three of the observed stars exhibit single-peak emission lines.Four stars show double-peaked pro-files.For Hen485the double-peak structure is only weakly in-dicated.CPD−52◦9243is the only star showing a P Cygni pro-file of group1.CD−24◦5721is exceptional.This star shows narrow absorption lines(Fig.D.6).The lines identified in the observed spectral sections of this star are listed in Table C.1.3.2.6.Na I D linesThe lines of the Na I D doublet are shown in Fig.D.7.The spectral section shown in thisfigure also contains the line of He Iλ5876˚A(see below).Most stars clearly show circumstel-lar Na I emission.Only4of the14observed stars do not show an emission component of the doublet.In most cases the ab-sorption components are blends of multiple narrow absorptionF.-J.Zickgraf:Circumstellar environments of galactic B[e]-type stars9 Table5.Classification of the line profile types of the programme stars into groups1to4:1=normal P Cygni profile,2=single-peaked emission line,3=double-peaked emission line,4=absorption line.Additional classification codes are:?=weak line, no further classification possible,0=no line visible,–=not observed.For class3a minus or plus sign denotes objects with V/R≤1.0or V/R>1.0,respectively.For Na I D no group is listed because of the confusion due to interstellar absorption components.For this doublet only the presence of emission(“em”)or pure absorption(“abs”)is indicated.star Hα[O I][Fe II][N II][S III]Fe II He I Na I Da:Fe IIλ6586c:He Iλ6678in emissiond:He Iλ6678possible blue shifted absorption componente:observed with R=23000f:observed with FOCESlines which are very likely mainly due to interstellar absorp-tion.This makes it difficult to detect circumstellar absorption features.Because of this problem only the overall appearance of emission or absorption is listed in Table5.Exceptions are CPD−52◦9243and possibly Hen485,cf.Sect.C.18and C.14. Heliocentric radial velocities of the absorption components are listed in Table B.2.3.3.He I linesThe He Iλ5876˚A lines are displayed in Fig.D.7.They appear in all four varieties of profile types.However,only one star exhibits a clear P Cyg profile of type1,namely MWC300.In CPD−57◦2874an emission component seems to partlyfill in the absorption component.Two stars show split type3profiles andfive stars single-peaked emission profiles.Six stars show an absorption line.For four stars no observation of He Iλ5876˚A were obtained.In MWC137strong variability was found be-tween1987and2002.The He I line changed from absorption to emission(cf.Sect.C.3).3.4.SummaryAn important result of the observations presented here is the detection of one or more double-peaked emission lines in many objects(cf.Table5).Actually,15,possibly16,of the18objects show at least one line with a double-peaked profile.This profile type is found for both,permitted and forbidden lines,but not necessarily for each line of a particular star.Eleven of the18 objects have split Hαprofiles.Split forbidden lines are found in13objects.Twelve stars exhibit split[O I]lines.The frac-tion of split lines of[N II]and[Fe II]is smaller.Only8of18 stars exhibit split[N II]lines,and5of17stars have split[Fe II] lines.There are only2cases where Hαis double-peaked, but all forbidden lines are single-peaked emission lines.These are HD87643and MWC300.According to Oudmaijer et al. (1998),and Wolf&Stahl(1985and Winkler&Wolf(1989), respectively,they belong to the B[e]supergiants and are most likely viewed under intermediate to pole-on inclination angles. Note,however,that the nature of these stars still is controver-sially discussed(see also Sect.C.5).A remarkable feature of the double-peaked profiles is that most,i.e.,∼85%,of the observed lines have an intensity ratio of the violet to red component of V/R≤1.Of the43detected type3lines only8show a V/R ratio larger than1.These are 6of26forbidden,and2of16permitted lines(cf.Table A.1). The latter are all Fe II lines.4.Density conditions in the forbidden-lineforming zoneThe interpretation of the observed line profiles might be com-plicated by the fact that the sample of B[e]-type stars is not ho-mogeneous with respect to the intrinsic object characteristics. The discussion by Lamers et al.(1998)showed that the con-nection between the different classes of B[e]-type stars is the10 F.-J.Zickgraf:Circumstellar environments of galactic B[e]-type starsuniformity of the B[e]phenomenon which calls for invoking a common cause for its occurence in different environments.In the following we will therefore take the view of looking primar-ily at the B[e]phenomenon itself rather than at specific object classes.The forbidden-lines in the spectra of B[e]-type stars are dominated by lines of low-excitation ions of neutral or singly ionized metals.Higher excitation lines like [S III ]are rare.This indicates that the temperaturein thelineemittingregion is about 104K (Lamers et al.1998).The forbidden lines probe the outer low-density zone of the line formation region.A measure for the maximum density in this region is the critical density,N cr ,for which downward collisional and radiative rates are equal.In the approximation of a 2-level ion with upper level u and lower level l it is given by N cr =A ulΩ(u,l )T2(2)with the collision strength Ω(u,l ),the statistical weight g u andthe electron temperature T .According to Viotti (1976)Ω(u,l )is given byΩ(u,l )≈0.2λ4g u A ul(3)with the wavelength λin microns.For [Fe II ](14F)λ7155˚Athis leads to N cr ≃2.2108cm −3for T e =104K.The critical den-sities are summarized in Table 6.Table 6.Critical densities,N cr ,of the observed forbidden lines for an electron temperature of T e =104K,and total ion-ization energies,χ,for the production of the respective ion (Cox 2000).The last line gives D 0=N 0/N cr for a density N 0=1011cm −3at r =1R ⋆.ion [O I ][Fe II ][N II ][S III ]lineλ6300˚Aλ7155˚Aλ6583˚Aλ6312˚AThe forbidden lines not only differ with respect to the crit-ical density but also have different ionisation potentials.Theionisation energy necessary to form Fe II is 7.9eV .For N II an energy of 14.53eV is required.With χ=33.70eV S III has the highest ionisation energy of the observed forbidden lines.Hence,the forbidden lines probe a density interval of about three orders of magnitude,∼105-108cm −3,and a range of ionisation from neutral,[O I ],to [S III ]with an ionisation po-tential of ∼34eV .5.Disk wind:radial expansion vs.rotationA spherically symmetric and radially expanding wind is ex-pected to form flat-topped profiles if the lines are optically thin.This has already been shown by Beals (1931).The forbidden lines in particular form at large distances from the central star where the wind has reached the terminal velocity (see below).A constant velocity wind is expected to form box-shaped lines if the emissivity is constant throughout the emitting volume.In the observed sample of B[e]-type stars there is just one case,CPD −57◦2874,where a line profile comes close to flat-topped,however not box-shaped.This is the line [O I ]λ6300of this object.The vast majority of the observed profiles are clearly different from flat-topped and therefore are inconsis-tent with a spherically symmetric and optically thin line for-mation region.Deviations from flat-topped profiles could be produced in the case of spherical symmetry by additional ex-tinction due to dust distributed evenly throughout the line for-mation region.This has been discussed e.g by Appenzeller et al.(1984)for T Tauri stars.However,the profile shape expected for this configuration is not observed in any of the B[e]-type stars of the sample presented here.The polarimetric observa-tions and the forbidden line profiles therefore strongly indicate that the B[e]phenomenon is correlated with an anisotropic dis-tribution of the circumstellar matter.Split profiles of H αsimilar to those shown in Fig.1are fre-quently found in classical Be stars,although the H αequivalent widths in these stars are usually much smaller than in B[e]-type stars and the underlying photospheric absorption component is often discernible.The double-peaked Be star profiles are gener-ally assigned to a disk-like geometry of the line forming region in connection with rotation.Mihalas &Conti (1980)discussed the formation of Beals type III,i.e.type 3,line profiles in the context of the combi-nation of rotation and expansion in a disk-like circumstellar environment.Adding expansion could in particular explain the blueshifted absorption components of H αand the V/R ratios smaller than 1.It would introduce an asymmetry of the line profiles by shifting the central reversals towards shorter wave-lengths as observed for most B[e]-type stars.For the forbidden lines,however,this mechanism would not work because the lines are optically thin and therefore absorption does not con-tribute.Nevertheless,the combination of expansion and rota-tion could at least explain the observed double-peaked profiles of H α.The double-peaked profiles of the optically thin lines could quite naturally be produced in rotating disks as shown e.g.by P¨o llitsch (1981).Keplerian disks could for example ex-ist around binary B[e]stars (see Sect.1).The profiles calcu-lated by P¨o llitsch display,however,two emission peaks withV/R=1due to the axial symmetry.Profiles of this type found only in a few cases,e.g.[S III]of MWC349A,[N II] CPD−57◦2874,[N II]and[Fe II]of MWC939,and[O I] CD−24◦5721and CPD−57◦2874.However,the majority double-peak lines has V/R<1including other lines of mentioned stars.It is therefore not obvious that rotation is likely explanation for the double-peaked profiles.Rather, line profiles seem to be determined by radial outflow.Let us assume as an example a disk-like configurationa rotational velocity v0at1R⋆of v0=300km s−1and constant radial expansion velocity of v exp.Angulartum conservation requires v rot(r)=v0R⋆/r.Hence at distance of10R⋆the rotation velocity would have droppedures the solid line designates a ratio of line widths of1.The observed line widths may help to better understand the possible role of expansion and rotation.In a disk-like circum-stellar environment in which rotation dominates over expansion the forbidden lines are expected to be narrower than the permit-ted lines because the rotational velocity decreases outwards.If rotation is negligible compared to the expansion velocity of a wind accelerated outwards the forbidden lines should have a larger width than the permitted lines.The latter are formed in the accelerating inner wind zone.The forbidden lines originate at large distance from the star where the wind has reached the terminal velocity.In Figs.5and6the FWHM of[O I]λ6300˚A is plotted ver-sus the FWHM of Hαand He I,respectively.They clearly showThe comparison of the line widths of the forbidden lines shown in Fig.7reveals a correlation which is consistent with the assumption that the velocity in the line forming region is constant,and hence that rotation is not important far from the central star.With few exceptions the[O I]line is approx-imately as broad as the[Fe II]line.For[N II]the result is similar,however,with larger scatter.The comparison of[N II] and[Fe II]displayed in the lower left panel of Fig.7shows four stars with broader[Fe II]than[N II].Note that in two of these cases,MWC137and MWC1055,the lines are very weak and the line widths are uncertain.Only Hen485and CPD−57◦2874show significantly broader[Fe II]than[N II]. The general trend is towards equal widths or smaller widths for[Fe II].The comparison with[S III]is not meaningful and therefore not shown because only three stars exhibit this line, i.e.MWC17,MWC137,and MWC349A.Inspecting the line。