小型陀螺仪
微型陀螺仪
华中科技大学机械科学与工程学院2015-2016 年第1 学期课程报告考生姓名:潜世界考生学号:M201570372专业、班级:机硕1502 班课程名称:微纳制造技术基础授课教师:朱福龙课程成绩:考查日期:2015年11月摘要陀螺仪是一种能够敏感载体角度或角速度的惯性器件,在姿态控制和导航定位等领域有着非常重要的作用。
传统的机械陀螺仪由于体积大、成本高、不适合批量生产等因素制约了其在很多方面的应用。
在科技发展的推动以及市场需求的牵引下,陀螺仪正朝着高精度、高可靠性、微型化、多轴测量和多功能测量的方向发展。
随着MEMS 技术的发展,MEMS 微细加工工艺在惯性器件制作中的应用大大减小了陀螺仪的尺寸,降低了生产成本,使其能够在汽车、工业自动化、消费电子等领域得到更广泛的应用。
文章首先对陀螺仪做了简单的原理和功能介绍,阐述了当前微陀螺仪是非常具有前景的研究防线,并简单介绍了几种常见的微陀螺仪,然后对微陀螺仪的结构进行了简单的分析并且分析了微机械陀螺仪的设计及制造过程和工艺方法并对其中的技术难点进行了分析,也对加工陀螺仪必须的MEM工艺进行了概述,然后对微陀螺仪的前景及应用进行了进一步的探讨。
关键词:微机械陀螺仪、MEM技术、制造过程AbstractGyroscope is a kind of inertial device which can be sensitiveto the angle or angular velocity of the carrier, which is very important in attitude control and navigation. Because of the large volume, high cost and not suitable for mass production, thetraditional mechanical gyroscope has been used in many aspects.Driven by the development of science and technology and the demand of the market, the gyroscope is developing in the direction of high precision, high reliability, miniaturization, multi axis measurement and multi function measurement. With the development of MEMS technology, the application of MEMS micro machining technology in the fabrication of inertial device greatly reduces the size of the gyroscope, reduces the cost of production, and can be used in the fields of automobile, industrial automation, consumer electronics and other fields.Firstly, this paper introduces the principle and function ofthe gyroscope. The current research on the micro gyroscope is very promising, and some common micro gyroscope is introduced. Then the structure of the micro gyroscope is analyzed. The design and manufacturing process and process method are analyzed.Keywords:Micromechanical gyroscopes, MEMS technology, production process、微机械陀螺仪研究背景(一)概念简介微机械MEM 是英文Micro Electro Mechanical systems 的缩写,即微电子 机械系统。
六轴陀螺仪原理
六轴陀螺仪原理
六轴陀螺仪是一种常用于飞行器、机器人等设备中的惯性测量单元。
它由三个加速度计和三个陀螺仪组成,可以测量物体在三个方向上的加速度和角速度。
陀螺仪原理是基于角动量守恒定律,即当一个物体受到外力作用时,它的角动量会保持不变。
在六轴陀螺仪中,陀螺仪通过测量物体绕三个轴的角速度来计算物体的角动量。
当物体绕某个轴旋转时,陀螺仪会感受到一个由惯性力引起的扭矩,这个扭矩与物体的角速度成正比。
通过测量这个扭矩,陀螺仪可以计算出物体的角速度。
加速度计原理是基于牛顿第二定律,即物体的加速度与作用在它上面的力成正比。
在六轴陀螺仪中,加速度计通过测量物体在三个方向上的加速度来计算作用在物体上的力。
当物体加速度发生变化时,加速度计会感受到一个由惯性力引起的变化,这个变化与物体的加速度成正比。
通过测量这个变化,加速度计可以计算出物体所受的加速度。
综合使用陀螺仪和加速度计可以得到物体在三个方向上的角速度和加速度,从而实现对物体的姿态和运动状态的测量。
小学科学实验制作简易陀螺仪

陀螺仪的未来发展前景
陀螺仪在航空航天领域的应用将更加广泛,为导航、姿态控制等提供更加精确的数据。
随着智能驾驶技术的发展,陀螺仪在汽车领域的应用将更加重要,为车辆的稳定性控 制和自动驾驶提供支持。
陀螺仪在机器人领域的应用将更加普及,为机器人的运动控制和导航提供更加智能化 的解决方案。
陀螺仪在虚拟现实和增强现实领域的应用将更加深入,为虚拟环境的稳定性和真实性 提供保障。
军事:陀螺仪可用 于导弹、火箭和战 斗机的导航和制导 系统。
汽车:陀螺仪可应 用于车辆稳定性控 制、自动驾驶和悬 挂系统。
机器人:陀螺仪可 以帮助机器人实现 自主导航和姿态控 制。
陀螺仪的局限性
精度限制:由 于制造工艺和 材料限制,陀 螺仪的精度会 受到一定影响。
温度影响:陀 螺仪的工作性 能受温度影响 较大,需要采 取相应的温度
小学科学实验制作简易陀螺仪
, a click to unlimited possibilities
汇报人:
目录
单击此处添加 目录项标题
陀螺仪的原理
制作简易陀螺 仪
陀螺仪的实验 应用
陀螺仪的拓展 知识
01
添加章节标题
02
陀螺仪的原理
陀螺仪的工作原理
陀螺仪的原理基于角动量守恒定 律,即旋转轴所指的方向在不受 外力影响时是不会改变的。
制作技巧
选择合适的材料:选用轻便、坚固且转动力强的材料,如塑料或木材。 设计合适的形状:陀螺仪的形状应尽量简单,以减少空气阻力,提高旋转稳定性。 确定合适的轴心:确保陀螺仪的轴心与旋转轴线重合,以提高旋转稳定性。 调整重心位置:通过调整陀螺仪的重心位置,可以改变其旋转速度和稳定性。
制作成功后的测试
音叉式微陀螺的工作原理

音叉式微陀螺的工作原理
音叉式微陀螺是一种常见的微型陀螺仪,它的工作原理基于震动传感器和陀螺效应。
音叉式微陀螺的结构包括两个相互垂直的音叉,每个音叉的末端都有一个质量块。
当陀螺仪受到旋转力矩时,两个音叉的振动频率会发生微小的差异。
当陀螺仪不受旋转力矩作用时,两个音叉的振动频率是相等的。
当陀螺仪受到旋转力矩作用时,陀螺会发生旋转,这会导致两个音叉振动频率的微小差异。
这个差异可以通过传感器检测到。
传感器一般采用压电传感器或光纤传感器。
压电传感器通过测量音叉振动产生的压电信号来检测音叉的振动频率差异。
光纤传感器则通过测量音叉振动产生的光信号来检测振动频率差异。
根据陀螺效应,当陀螺仪受到外部旋转力矩作用时,它会产生一个与旋转速度正比的陀螺力矩。
这个陀螺力矩会使陀螺产生一个与旋转速度方向垂直的角动量,使陀螺仪保持平衡。
通过测量音叉振动频率的差异,可以确定陀螺仪受到的旋转力矩的大小和方向。
因此,音叉式微陀螺可以用来测量和检测物体的旋转运动。
关于微陀螺仪的原理及应用
关于微陀螺仪的原理及应用1. 简介微陀螺仪是一种用于测量和检测角速度和角位置的微型惯性传感器。
它基于陀螺效应原理,利用微电子加工和微机电系统(MEMS)技术制造而成。
微陀螺仪具有体积小、重量轻、功耗低、响应速度快等特点,广泛应用于航空航天、导航仪器、车载系统、智能手机等领域。
2. 原理微陀螺仪的工作原理基于陀螺效应,即当一个物体在转动时,会产生一个力矩,使物体保持转动。
微陀螺仪利用这一原理来测量角速度和角位置。
微陀螺仪通常由两个相互垂直的振荡器构成,一个用于测量x轴角速度,另一个用于测量y轴角速度。
当微陀螺仪受到外界作用力或角速度时,振荡器会产生微小的振荡,其振荡的频率与外界作用力或角速度成正比。
微陀螺仪会通过测量这些振荡器的频率变化来计算角速度和角位置。
3. 应用微陀螺仪具有广泛的应用前景,在许多领域发挥重要作用。
以下是一些常见的应用领域:3.1 导航与定位微陀螺仪在导航与定位系统中有着广泛的应用。
例如,无人机、导弹等需要精确控制姿态的设备中,微陀螺仪可以通过测量姿态角速度和角位置来实现精确的飞行控制。
同时,在车载导航系统中,微陀螺仪可以用来检测车辆的转弯动作,从而提供更准确的导航信息。
3.2 智能手机和可穿戴设备微陀螺仪被广泛应用于智能手机和可穿戴设备中。
智能手机中的陀螺仪可以检测和监测设备的姿态、方向和运动状态,为用户提供更加智能化和沉浸式的交互体验。
同时,可穿戴设备中的陀螺仪可以用来监测用户的运动和活动状态,实现计步、睡眠监测等功能。
3.3 航空航天微陀螺仪在航空航天领域有着广泛的应用。
例如,航天器中的姿态控制系统通常需要使用微陀螺仪来实现姿态的测量和控制。
此外,微陀螺仪还可以用于飞机的导航和飞行控制系统中,提供准确的飞行姿态和位置信息。
3.4 其他领域除了上述应用领域之外,微陀螺仪还被应用于许多其他领域。
例如,在运动仪器中,微陀螺仪可以检测运动设备的角速度和角位置,为用户提供准确的运动数据。
光纤陀螺小型化技术的研究现状分析

光纤陀螺小型化技术的研究现状分析摘要:光纤陀螺仪(FOG)作为一种导航仪器,在航海、航天乃至国防等多个领域都获得了广泛应用。
就目前来看,光纤陀螺仪(FOG)受到体积的限制,导致其在航海、航天以及国防领域的应用备受限制。
这主要是因为光纤陀螺仪(FOG)广泛应用于无人机、水下机器人等方面,而随着科技的进步,这些设备的体积越来越小,对于导航的精准度也进一步提升,这也促使光纤陀螺(FOG)小型化技术进一步发展。
基于此,本文围绕光纤陀螺仪(FOG)小型化技术展开研究,对其技术原理、发展历程以及主要研究方向进行分析,并对其主要面临的技术问题展开研究,以供参考。
关键词:光纤陀螺;小型化技术;集成化引言光纤陀螺(FOG)是一种惯性陀螺仪,可以做到对物体运动方位实施精准把控[1]。
光纤陀螺仪(FOG)可以实现对载体相对惯性空间运动角速率进行测量,并且有着使用年限长、精准度高,并且其可以测量的范围也非常大,所以在航海、航天、工业乃至国防等领域都可以看到光纤陀螺仪(FOG)的身影,并已经成为现代化惯性器件的主流,也是今后惯性器件技术发展的主要方向。
一、光纤陀螺(FOG)技术原理分析光纤陀螺仪(FOG)技术的出现离不开萨格奈克效应(Sagnac),其主要是利用萨格奈克效应对载体的角速率信号实施测量,这也是惯性空间转动闭环光路中一种非常常见的光传播效应[2]。
闭环光路中,光的传播主要是发生在同一闭合光路中,向一个光源同时发射两束相同的光,在反方向传播下最终在同一探测点完成汇合。
当垂直于闭合光路所处平面轴线,在相对惯性空间存在转动角速度,那此时发出的光束和反方向传播的光束就会出现不同,这种不同也被称之为光程差。
因为光程差和相对惯性空间存在的旋转角速度成正比,所以在求旋转角速度时,只需要掌握光程差和相位差信息即可。
光纤陀螺(FOG)技术主要有三种,分别为干涉式光纤陀螺、布里渊光纤陀螺以及谐振腔光纤陀螺[3]。
其中干涉式光纤陀螺因为其具备互易性结构,两束发射的光在反方向传播时有着具备相同的传输特征,再加上其附加位移也相同,且有着良好的共模抑制效果,有利于避免寄生效应,所以精准度也更高。
激光陀螺精度

电源:±30 V、±12 V、±5 V、15 V DC
功耗:<25 W
通讯接口:RS422
电气接口:J30J-25ZK
物理指标
重量:<5.9 kg
体积:200 mm×186 mm×123 mm
环境适应性:
工作温度:-40℃~70℃
贮存温度:-55℃~80℃
振动:满足GJB150附录图A 8 W曲线地面车辆上设备振动试验曲线的要求
)
100°/s or 0.0278°/h
(我国发展:如漂移率0.01°~0.02°/h的新型激光陀螺捷联系统在新型战机上试飞,漂移率0.05°/h以下的光纤陀螺、捷联惯导在舰艇、潜艇上的应用,以及小型化挠性捷联惯导在各类导弹制导武器上的应用)
带宽
50
线性度
1
量程
600
角度随机游走
6°/sor 0.00166667°/h
冲击:30 g,11 ms
产品名称:HT-LG-IMU激光陀螺仪
产品简介:
小型数字化IMU,具备精度高、体积小的优点;预留减振器及GPS转换板安装接口。
技术指标
1)陀螺仪指标
零偏稳定性:≤0.01°/h(1σ)
零偏重复性:≤0.003°/h(1σ)
随机游走系数:≤0.003°/√h
标度因数重复性:≤10 ppm
标度因数非线性度:≤10 ppm
2)加速度计指标
零偏稳定性:5×10-5g(1σ)
零偏重复性:5×10-5g(1σ)
ห้องสมุดไป่ตู้陀螺性能指标
测试结果
标度因子
17.8
零漂
(陀螺仪的发展经历了几个阶段。最初的滚珠轴承式陀螺,其漂移速率为(l-2)°/h,通过攻克惯性仪表支撑技术而发展起来的气浮、液浮和磁浮陀螺仪,其精度可以达到0.001°/h,而静电支撑陀螺的精度可优于0.0001°/h。从60年代开始,挠性陀螺的研制工作开始起步,其漂移精度优于0.05°/h量级,最好的水平可以达到0.001°/h。
一种基于集成光学芯片的微小型光纤陀螺
第28卷第5期 中国惯性技术学报 V ol.28 No.5 2020年10月 Journal of Chinese Inertial Technology Oct. 2020 收稿日期:2020-07-28;修回日期:2020-10-15基金项目:国家重点研发计划(2017YFC0601702);航天科工集团重大自主创新课题(C041gjdx )作者简介:尚克军(1977—),男,博士研究生,从事惯性导航、视觉导航、数据融合技术研究。
E-mail :***************联 系 人:雷明(1983—),男,高级工程师,从事光纤陀螺技术研究。
E-mail :152****************文章编号:1005-6734(2020)05-0650-04 doi.10.13695/ki.12-1222/o3.2020.05.013一种基于集成光学芯片的微小型光纤陀螺尚克军1,2,雷 明2,向 强2,杨 怿2,冯 喆2,张丽哲2(1. 北京理工大学自动化学院,北京100081;2. 北京自动化控制设备研究所,北京100074) 摘要:针对海陆空天领域对微小型光纤导航元件的需求,提出了一种基于集成光学芯片的微小型光纤陀螺。
首先,给出了兼具光源、探测器、耦合器的集成光学芯片设计方案,根据光子噪声计算出陀螺的精度极限;随后,基于集成光学芯片、微型化环圈和小型化检测电路,搭建成功微小型光纤陀螺样机,陀螺整机尺寸仅为35 mm×35 mm×35 mm ;最后,对陀螺样机进行了性能测试,陀螺测试零偏不稳定性达到了0.072 ︒/h 。
虽然与基于分立光学器件的传统光纤陀螺相比,精度上还存在一定差距,但是通过集成光学芯片性能的进一步优化,未来有望满足微小型光纤陀螺的应用需求。
关 键 词:微小型光纤陀螺;集成光学芯片;超细径光纤;零偏不稳定性中图分类号:V241.5 文献标志码:AAn integrated optical chip based miniature fiber optic gyroscopeSHANG Kejun 1,2, LEI Ming 2, XIANG Qiang 2, YANG Yi 2, FENG Zhe 2, ZHANG Lizhe 2(1. School of Automation, Beijing Institute of Technology, Beijing 100081, China; 2. Beijing Institute of AutomaticControl and Equipment , Beijing 100074, China)Abstract: In order to meet the demand of micro fiber elements in the field of sea, land, air and sky, an miniature fiber optical gyroscope (M-FOG) based on integrated optical chip is proposed. Firstly, an integrated optical chip with a light source, a photo-diode and a 3-dB coupler is designed, and the precision limit of M-FOG is calculated. Secondly, based on the integrated optical chip, miniature fiber coil and detection circuit, M-FOG prototype is built successfully with the size of the 35 mm ×35 mm ×35 mm. Finally, the performance of the M-FOG is tested and the bias instability is 0.072︒/h. Although there is still a certain gap in precision compared with the traditional FOG based on discrete optical components, further optimization of the performance of integrated optical chip is expected to satisfy the requirement of miniature FOG in the future.Key words: miniature fiber optic gyro; integrated optical chip; ultra-fine fiber; bias instability光纤陀螺(Fiber Optical Gyroscope, FOG )经过40余年的发展,其精度范围覆盖0.0001 ︒/h~10 ︒/h [1-3],已广泛应用于海、陆、空、天各领域。
MEMS 3轴陀螺仪
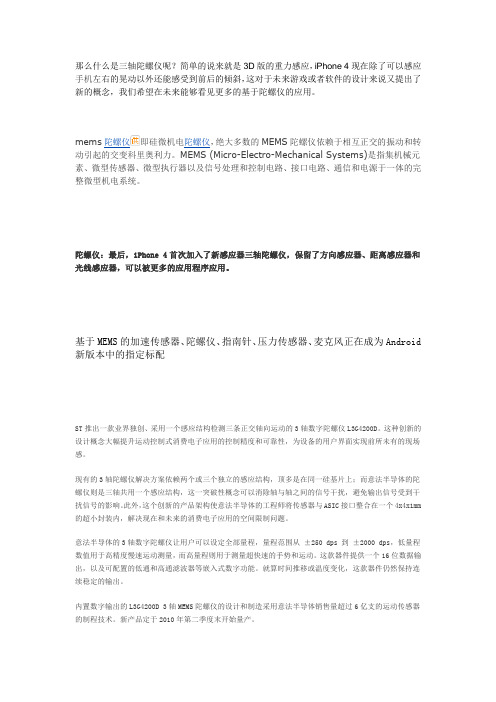
那么什么是三轴陀螺仪呢?简单的说来就是3D版的重力感应,iPhone 4现在除了可以感应手机左右的晃动以外还能感受到前后的倾斜,这对于未来游戏或者软件的设计来说又提出了新的概念,我们希望在未来能够看见更多的基于陀螺仪的应用。
mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。
MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。
陀螺仪:最后,iPhone 4首次加入了新感应器三轴陀螺仪,保留了方向感应器、距离感应器和光线感应器,可以被更多的应用程序应用。
基于MEMS的加速传感器、陀螺仪、指南针、压力传感器、麦克风正在成为Android 新版本中的指定标配ST推出一款业界独创、采用一个感应结构检测三条正交轴向运动的3轴数字陀螺仪L3G4200D。
这种创新的设计概念大幅提升运动控制式消费电子应用的控制精度和可靠性,为设备的用户界面实现前所未有的现场感。
现有的3轴陀螺仪解决方案依赖两个或三个独立的感应结构,顶多是在同一硅基片上;而意法半导体的陀螺仪则是三轴共用一个感应结构,这一突破性概念可以消除轴与轴之间的信号干扰,避免输出信号受到干扰信号的影响。
此外,这个创新的产品架构使意法半导体的工程师将传感器与ASIC接口整合在一个4x4x1mm 的超小封装内,解决现在和未来的消费电子应用的空间限制问题。
意法半导体的3轴数字陀螺仪让用户可以设定全部量程,量程范围从±250 dps 到±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。
这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。
就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
内置数字输出的L3G4200D 3轴MEMS陀螺仪的设计和制造采用意法半导体销售量超过6亿支的运动传感器的制程技术。
陀螺仪

陀螺仪的原理与发展一、引言陀螺仪是一种利用是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,在姿态控制和导航定位等领域有着非常重要的作用。
二、原理绕一个支点高速转动的刚体称为陀螺,通常它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,环绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进,又称为回转效应。
通常陀螺仪的基本组成包括:陀螺转子,内、外框架,附件等部件。
(如图一所示)图一图二三、特性陀螺仪在航空、航天、航海等领域的大规模应用,是由于它的两个基本特性:一为定轴性,另一是进动性。
定轴性是指:当陀螺仪高速旋转时,如果没有外力矩作用到陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,同时当有外力矩干扰时反抗任何改变转子轴向的力矩。
并且转子的转动惯量越大,转子的角速度越大,陀螺仪的稳定性越好。
进动性是指:当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。
其转动角速度方向与外力矩作用方向互相垂直。
进动角速度的方向可用右手定则判断(如图二所示)即伸直右手,大拇指与食指垂直,手指顺着自转轴的方向,手掌朝外力矩的正方向,然后手掌与4指弯曲握拳,则大拇指的方向就是进动角速度的方向。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为进动角速度ω=M/H。
(ω为进动角速度,M为外力矩,H为动量矩)四、陀螺仪的发展陀螺仪由1850年法国物理学家莱昂·傅科在研究地球自传中获得灵感而发明出来的,类似像是把一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度。
陀螺仪发明后,首先应用到航海上,后来在航空、航天等领域迎来了大规模应用,成为了最重要的仪表之一。
到第二次世界大战,德国人为了使飞弹能准确的落到目标上空,德国人研发了惯性制导系统。
MEMS陀螺仪研究综述(1)
MEMS 陀螺仪研究综述摘要:从MEMS 陀螺仪的基本工作原理、发展历程和相关的技术介绍,回顾了MEMS 微陀螺仪的研究进展,并简单介绍了MEMS 微陀螺仪的市场应用。
一、引言MEMS 是微电子机械系统(Micro-Electro-Mechanical Systems )的英文缩写,MEMS 技术是建立在微米/纳米技术(micro/nanotechnology )基础上,对微米/纳米材料进行设计、加工、制造、测量和控制的技术。
它可以将机械构件、光学系统、驱动部件、电控系统整合为一个整体单元,集微型机构、微型传感器、微型执行器以及信号处理和控制电路、直至接口、通信和电源等于一体的微型器件或系统。
如果采用与集成电路工艺类似的硅加工技术,便可利用IC 生产中的成熟技术、工艺 ,进行大批量、低成本生产,使性价比相对于传统的机械制造技术大幅度提高,实现大规模集成产业化。
而其中,MEMS 陀螺仪(gyroscope )又是MEMS 的一个重要发展方向。
随着MEMS 技术的发展,惯性微陀螺仪以其尺寸小、精度高等特点,越来越受到人们的关注。
在汽车导航、消费电子和移动应用等民用领域,航空航天以及现代和可预见的未来高科技战场上都拥有着广阔的发展和市场前景。
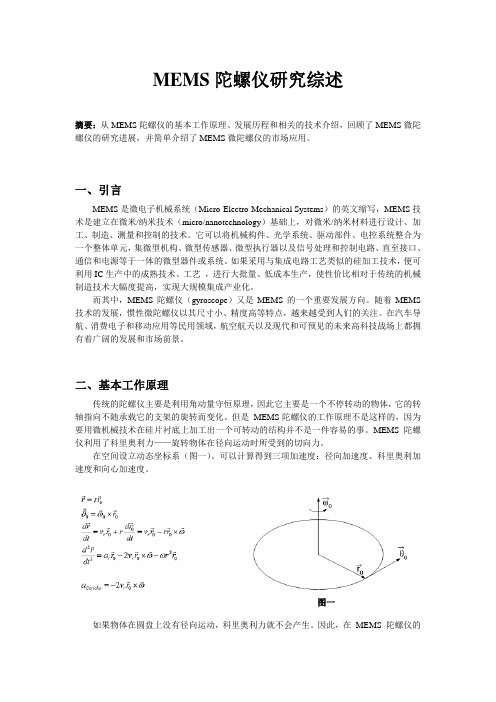
二、基本工作原理传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。
但是 MEMS 陀螺仪的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构并不是一件容易的事。
MEMS 陀螺仪利用了科里奥利力——旋转物体在径向运动时所受到的切向力。
在空间设立动态坐标系(图一)。
可以计算得到三项加速度:径向加速度、科里奥利加速度和向心加速度。
如果物体在圆盘上没有径向运动,科里奥利力就不会产生。
因此,在 MEMS 陀螺仪的图一设计上,这个物体被驱动,不停地来回做径向运动或者振动,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小振动,相位正好与驱动力差90度(图二)。
MEMS陀螺仪

MEMS陀螺仪的分类
1.振动式微机械陀螺仪 振动式微机械陀螺仪利用单晶硅或多晶硅制成的振动质 量,在被基带动旋转时的哥氏效应感测角速度。
2.转子式微机械陀螺仪 转子式微机械陀螺仪的转子由多晶硅制成,采用静电悬 浮,并通过力短再平衡回路测出角速度。从功能看,转 子式微机械陀螺仪属于双轴速率陀螺仪或双轴角速率传 感器。
低成本批量生产
• 将MEMS陀螺仪与其辅助电路整合在同一个封装内, 运用创新的MEMS制程技术,简化传感器与线路之 间的焊接过程,并缩小它们的封装尺寸(多轴陀 螺仪的系统封装面积仅为3×5平方毫米),用一 块硅片可一次性快速生产大量产品,实现低成本 量产。
MEMS陀螺仪的特点
缺点: • 陀螺仪根据精度划分,有超高精度、中高精度陀
导航等领域。
MEMS陀螺仪的民用优势
微机械陀螺仪由于具有非 常容易小型化和批量生产, 成本低和体积小等特点。 近年来,在很多应用中受 到密切地关注。
MEMS陀螺仪可 在数码相机中 用于稳定图像
整合MEMS加速计和陀螺仪地磁的模块 正在进入廉价的电子玩具市场,传感 器模块提供的动作感应功能可实现互 动的游戏体验,还能让更小的儿童上 网分享快乐:孩子们很快就能够用自 然的动作玩这些玩具,不再使用按钮 或键盘一类的东西。
螺仪和低精度陀螺仪。MEMS陀螺仪虽然应用前景 广,但目前仍属于低精度陀螺仪,随机漂移误差 较大。超高精度陀螺仪主要包括静电陀螺、磁浮 陀螺和液浮陀螺。目前最高精度的陀螺仪是静电 陀螺仪。
MEMS陀螺仪的应用发展史
1.MEMS陀螺仪的第一波应用是1990年代的汽车安 全系统
2.MEMS陀螺仪第二波应用是始于2000年的消费电 子产品
2、CRS02系列角速度传感器(微机械陀螺仪) 是 用于测量运动物体角速度的微型惯性器件。陀螺 仪应用Corioli效果,采用硅素超微精密环型传 感件设计而生产一耐震动的高精度类比输出电压。 陀螺仪量得的是角速度资料, 经积分旋转,而经 微分可得角加速度资料。惯性系统最大的一个缺 点, 就是陀螺仪的误差会随着工作时间而累积, 这样的误差是无法接受的,需要以各种滤波和定 位方法, 去修正位置的误差。 它的主要用途是 导航、汽车安全系统、遥控直升机、车装/船双 卫星天线、航天、工业用、安定架、测量仪器、 船双电子罗盘补偿等
机械行业-微机械陀螺简述,微惯性技术 精品

微
机
械
陀
螺
分
按材料
类
旋转振动结构 线性振动结构
硅材料 非硅材料
振动盘结构陀螺 旋转盘结构陀螺
正交线振动结构 非正交线振动结构
单晶硅 多晶硅 石英 其它
振动平板结构 振动梁结构 振动音叉结构 加速度计振动结构
振动平板结构 振动梁结构 振IGA(光刻、电铸和注塑)
微机械陀螺简述
Contents
微机械陀螺仪基本概念 微机械陀螺仪基本原理 微机械陀螺仪基本性能指标 微机械陀螺仪发展概述
微机械陀螺仪应用
1、 微机械陀螺仪基本概念
基本概念及组成 微机械陀螺特点 微机械陀螺分类
1.1 基本概念及组成
陀螺仪也称角速率传感器,是用来测量物体旋转快慢 的传感器。微机械陀螺仪(MEMS gyroscope)主要有转子式、 振动式微机械陀螺仪和微机械加速度计陀螺仪三种。由于 工艺限制,在硅衬底上加工出可高速旋转的转子并不容易, 因此转子式的微机械陀螺并不常见,而振动式和微加速度 计式的微陀螺基本原理一致,都是利用柯氏效应。
Vr0=r0 ω
向 分
速 度
α=ωt
析
α=ωt
析
分
析
由于对时间取极限t→0
两个加速度方向 相同
柯氏加速度: ac=at+ar=2Vω
2.2 柯氏效应与柯氏力
根据以上分析验证了“柯氏加速度的方向垂直于角 速度矢量和相对速度矢量”
同时发现:柯氏加速度正比于运动速度和旋转角 速度。 ac=2Vω
下面将利用前面分析的柯氏加速度的方法解释一自 然现象——傅科摆。
1. 体积小、重量轻、功耗低。 2. 成本低,加工工艺可保证大规模生产。 3. 可靠性好,工作寿命超过10万小时,能承受数千甚至上万g的 冲击。 4. 测量范围大,一些MEMS 陀螺仪测量范围可高达数千°/s
MEMS 陀螺仪简介及其应用

命题教师:1.出题用小四号、宋体输入打印, 纸张大小为8K.考 生:1.不得用红色笔,铅笔答题,不得在试题纸外的其他纸张上答题,否则试卷无效。
2.参加同卷考试的学生必须在“备注”栏中填写“同卷”字样。
3.考试作弊者,给予留校察看处分;叫他人代考或代他人考试者,双方均给予开除学籍处理。
并取消授予学士学位资格,该科成绩以零分记。
MEMS 陀螺仪简介及其应用杨永 110204116摘要:自陀螺仪问世,因其独特的性能,广泛地应用于航海、航空、航天以及国民经济等领域。
陀螺及其相关技术一直是各国重点发展的技术之一,发展十分迅速。
迄今为止,陀螺仪从传统的刚体转子陀螺仪到新型的固态陀螺仪,种类十分繁多。
液浮陀螺、静电陀螺和动力调谐陀螺是技术成熟的三种刚体转子陀螺仪,达到了精密仪器领域内的高技术水平。
随着光电技术、微米/纳米技术的发展,新型陀螺仪如激光陀螺、光纤陀螺和微机械陀螺应运而生。
它们都是广义上的陀螺仪,是根据近代物理学原理制成的具有陀螺效应的传感器。
因其无活动部件,称为固态陀螺仪。
这种新型全固态的陀螺仪将成为未来的主导产品,具有广泛的发展前途和应用前景。
关键词: MEMS ;陀螺仪;光学陀螺;微机械陀螺1.MEMS 概述MEMS 是英文Micro Electro Mechanical systems 的缩写,即微电子机械系统。
微电子机械系统(MEMS)技术是建立在微米/纳米技术(micro/nanotechnology )基础上的 21世纪前沿技术,是指对微米/纳米材料进行设计、加工、制造、测量和控制的技术。
它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统。
这种微电子机械系统不仅能够采集、处理与发送信息或指令,还能够按照所获取的信息自主地或根据外部的指令采取行动。
它用微电子技术和微加工技术(包括硅体微加工、硅表面微加工、LIGA 和晶片键合等技术)相结合的制造工艺,制造出各种性能优异、价格低廉、微型化的传感器、执行器、驱动器和微系统。
G3 陀螺仪说明书
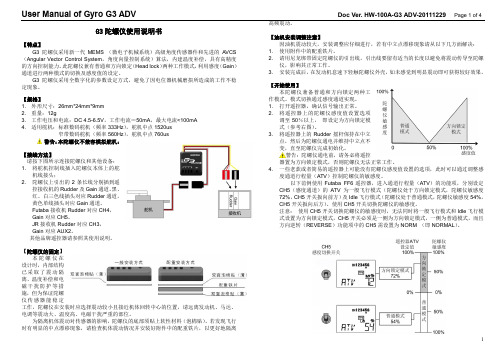
G3陀螺仪使用说明书【特点】G3陀螺仪采用新一代MEMS (微电子机械系统)高级角度传感器件和先进的AVCS(Angular Vector Control System,角度向量控制系统)算法,内建温度补偿,具有高精度的方向控制能力。
此陀螺仪兼有普通和方向锁定(Head lock)两种工作模式,利用感度(Gain)通道进行两种模式的切换及感度值的设定。
G3陀螺仪采用全数字化的参数设定方式,避免了因电位器机械磨损所造成的工作不稳定现象。
【规格】1. 外形尺寸:26mm*24mm*9mm2. 重量:12g3. 工作电压和电流:DC4.5-6.5V,工作电流≈50mA,最大电流<100mA4. 适用舵机:标准数码舵机(频率333Hz),舵机中点1520us窄带数码舵机(频率560Hz),舵机中点760us警告:本陀螺仪不兼容模拟舵机:【接线方法】请按下图所示连接陀螺仪和其他设备:1. 将舵机控制线插入陀螺仪本体上的舵机线接头;2. 陀螺仪上引出的2条长线分别插到遥控接收机的Rudder及Gain通道。
黑、红、白三色线插头对应Rudder通道,黄色单线插头对应Gain通道。
Futaba接收机Rudder对应CH4,Gain对应CH5。
JR接收机Rudder对应CH3,Gain对应AUX2。
其他品牌遥控器请参照其使用说明。
【陀螺仪的固定】本陀螺仪在设计时,内部结构已采取了震动隔离、温度补偿和电磁干扰防护等措施,但为保证陀螺仪传感器能稳定工作,陀螺仪在安装时应选择震动较小且接近机体回转中心的位置,请远离发动机、马达、电调等震动大、温度高、电磁干扰严重的部位。
为隔离机体震动对传感器的影响,陀螺仪的底部须贴上软性材料(泡棉贴)。
若发现飞行时有明显的中点漂移现象,请检查机体震动情况并安装好附件中的配重铁片,以更好地隔离高频震动。
【油机安装调整注意】因油机震动较大,安装调整应仔细进行,若有中立点漂移现象请从以下几方面解决:1. 使用附件中的配重铁片。
全球最小的3轴陀螺仪L3G3250A出世

全球最小的3轴陀螺仪L3G3250A出世IC购商城()报道:作为智能手机领域的创新技术,3轴陀螺仪在iPhone4中大放异彩。
据最新报道,iPhone4内置的3轴陀螺仪制作商意法半导体公司最近又推出新的3轴陀螺仪L3G3250A,这款产品占板空间相比上一款缩减近40%,是全球最小的3轴陀螺仪。
意法半导体在过去两年内共推出40余款陀螺仪产品,在消费电子和移动应用市场的占有率从2009年的不到1%大幅提升至2010年的30%。
其上一款产品意法半导体的L3G462A陀螺仪已经是市场上最小的3轴模拟陀螺仪,采用4x4x1mm3 超小封装。
而新产品L3G3250A的封装仅为3.5x3x1mm,占板空间由原来的的17.6 mm3 缩减至10.5 mm3,缩减幅度近40%。
以便于满足下一代游戏机、虚拟实境输入设备、运动控制人机界面(MMI)、GPS导航系统、家电以及机器人对更小占板空间的要求。
而且L3G3250A谐振频率设置在音频带宽之外,从而使其可以完全抵抗如安装在传感器附近的扬声器产生的音频噪声,以及通过印刷电路板传递的耦合机械振动,进而使新产品拥有更高的检测精度和可靠性。
意法半导体的3轴陀螺仪产品最早在IPONE4中就得到应用。
2010年,苹果公司创新性地在新产品iPhone 4 中置入“三轴陀螺仪”,让iPhone的方向感应变得更加智能,从此手机也有了像飞机一样的“感应”,能够知道自己“处在什么样的位置”。
这个功能最大的特点就是即使手机在进入隧道丢失GPS信号的时候,也可以依靠拼接陀螺仪感知的加速度方向和大小继续导航。
同时三轴陀螺仪将会与iPhone原有的距离感应器、光线感应器、方向感应器结合起来让iPhone 4更好的人机交互功。
国外一些机构还指出在苹果的另外一款新产品iPad平板电脑中本来也计划要加入这种陀螺仪设计,不过后来由于某种原因放弃了这个计划,但有可能在下一代iPad中会加入这种功能。
而意法半导体公司推出的这一技术进步对手机、平板电脑、游戏机等智能消费电子产品尤为重要,它将用于实现高精准度的手势控制和更直接的用户界面,使其更加真实,有效实现人机互动和提升用户体验,在制造商们在日益激烈的市场竞争中占据有利地位。
GY401陀螺仪说明书
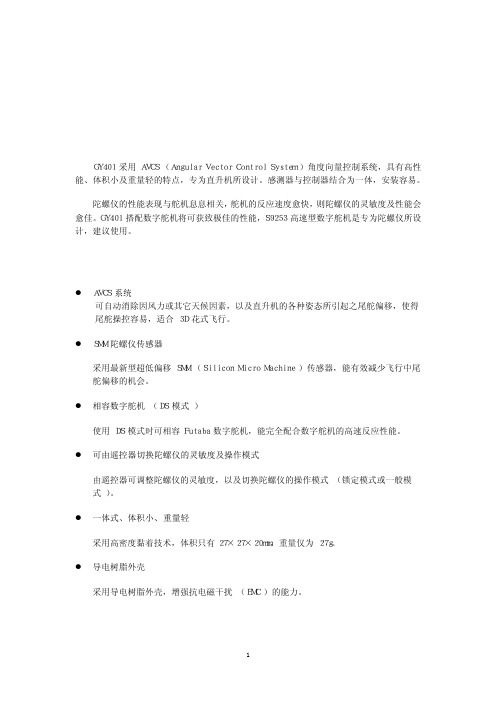
GY401使用手册 前言 GY401 采用 AVCS ( Angular Vector Control System ) 角度向量控制系统,具有高性能、体积小及重量轻的特点,专为直升机所设计。
感测器与控制器结合为一体,安装容易。
陀螺仪的性能表现与舵机息息相关,舵机的反应速度愈快,则陀螺仪的灵敏度及性能会愈佳。
GY401 搭配数字舵机将可获致极佳的性能,S9253 高速型数字舵机是专为陀螺仪所设计,建议使用。
功能介绍 lAVCS 系统 可自动消除因风力或其它天候因素,以及直升机的各种姿态所引起之尾舵偏移,使得尾舵操控容易,适合 3D 花式飞行。
lSMM 陀螺仪传感器 采用最新型超低偏移 SMM ( Silicon Micro Machine ) 传感器,能有效减少飞行中尾舵偏移的机会。
l相容数字舵机 ( DS 模式 ) 使用 DS 模式时可相容Futaba 数字舵机,能完全配合数字舵机的高速反应性能。
l可由遥控器切换陀螺仪的灵敏度及操作模式 由遥控器可调整陀螺仪的灵敏度,以及切换陀螺仪的操作模式 ( 锁定模式或一般模式 )。
l一体式、体积小、重量轻 采用高密度黏着技术,体积只有27×27×20mm,重量仅为 27g。
l导电树脂外壳 采用导电树脂外壳,增强抗电磁干扰 ( EMC ) 的能力。
套件内的组件 打开 GY401 包装盒后,请先检查是否包括下列组件∶ GY401 规格资料 l控制系统:数字式 PI ( proportional integration ) 比例式积分控制。
l陀螺仪传感器:SMM 系统振动式陀螺仪。
l操作电压:4~6V ( 直流电 ) l操作温度:-10  ̄ +45°C l外型尺寸:27 × 27 × 20 mm l重量:27g 功能∶具备正逆转开关、DS 模式开关、控制延迟调整旋纽、舵机最大行程量调整旋纽。
减摇陀螺原理

减摇陀螺原理减摇陀螺是一种常见的稳定控制装置,广泛应用于航空航天、导航、导弹制导、船舶控制等领域。
它通过利用陀螺仪的原理,实现对物体的稳定控制。
下面将详细介绍减摇陀螺的原理和工作方式。
一、陀螺仪的原理陀螺仪是一种利用陀螺效应来测量和控制角速度的设备。
陀螺效应是指陀螺在转动过程中产生的稳定性。
当陀螺体转动时,其转动轴会保持一个固定的方向,不受外界力的影响。
这是因为陀螺体的转动轴具有稳定性,使得陀螺体能够保持一个固定的姿态。
二、减摇陀螺的原理减摇陀螺是利用陀螺仪的原理来实现对物体的稳定控制。
它通过在物体上安装陀螺仪,并将陀螺仪的输出信号与控制系统相连,实现对物体的姿态稳定控制。
具体来说,减摇陀螺通过测量陀螺仪的输出信号,得到物体的姿态角速度,然后通过控制系统对物体进行调整,使其保持稳定。
三、减摇陀螺的工作方式减摇陀螺的工作方式可以分为两个主要步骤:测量和控制。
1. 测量:减摇陀螺通过陀螺仪来测量物体的姿态角速度。
陀螺仪通过感知物体的转动轴的变化,测量出物体的角速度。
具体来说,陀螺仪会产生一个与物体转动轴一致的输出信号,该信号可以表示物体的角速度。
2. 控制:减摇陀螺通过控制系统来调整物体的姿态,使其保持稳定。
控制系统会根据陀螺仪的输出信号,计算出物体需要进行的调整动作。
然后,控制系统会将调整动作传递给物体,使其按照要求进行姿态调整。
减摇陀螺的工作过程可以简单描述为:陀螺仪测量物体的姿态角速度,控制系统根据姿态角速度计算出调整动作,然后将调整动作传递给物体,使其保持稳定。
四、减摇陀螺的应用减摇陀螺广泛应用于航空航天、导航、导弹制导、船舶控制等领域。
在航空航天领域,减摇陀螺被用于飞行器的姿态稳定控制,使飞行器能够保持平稳飞行。
在导航领域,减摇陀螺被用于导航设备的稳定控制,提高导航的精度和可靠性。
在导弹制导领域,减摇陀螺被用于导弹的姿态控制,使导弹能够准确击中目标。
在船舶控制领域,减摇陀螺被用于船舶的稳定控制,降低船舶的晃动和颠簸。
不用电的磁悬浮陀螺—创客电子制作入门制作方案及趣味软硬件DIY项目

不用电的磁悬浮陀螺笔者此次介绍的悬浮陀螺不需要控制电路,不用电,只使用铁氧体永磁铁,悬浮高度可达5cm,而且趣味性强!经过适当练习,相信你很快就能成为“悬浮达人”。
3.1 材料与制作图3.1所示为制作所需原材料,具体如表3.1所示。
图3.1 制作悬浮陀螺所需材料表3.1 制作悬浮陀螺所需材料清单环形铁氧体磁铁A充当底座磁铁。
悬浮陀螺受到底座磁铁的排斥力,当此排斥力与悬浮陀螺受到的重力大小相等、方向相反时,悬浮陀螺就可以悬浮了。
铁氧体磁铁B用来制作悬浮陀螺。
在底座磁铁的规格是内径40mm、外径80mm、高度20mm的条件下,笔者也曾经试验过用其他规格的小型环形磁铁制作过悬浮陀螺,但是效果不好。
笔者认为,目前用于制作悬浮陀螺的小型环形磁铁内径不宜过大,不应该比旋转轴(签字笔芯)大出太多,同时小型环形磁铁的外径也不应过大。
如果您的底座磁铁不是笔者所提供的规格,那么小型环形磁铁的规格可以适当调整。
图3.2所示为底座磁铁A与悬浮陀螺磁铁B的比例视图。
图3.2 环形铁氧体磁铁A与B图3.3所示为塑料底盘。
在塑料底盘的边缘均匀地钻3个孔,孔的大小应与螺母的大小相近。
打完孔后将螺母填入孔中,并使用AB胶水将螺母与孔之间的缝隙填补上。
当螺母与塑料底盘固定好后,将螺丝拧入螺母(见图3.4)。
在3个螺丝分别安装好后,悬浮陀螺的底盘就大功告成了。
图3.3 悬浮陀螺塑料底盘图3.4 将螺丝拧入螺母现在开始制作悬浮用的陀螺。
取出废旧签字笔的笔芯,并清洁干净(见图3.5)。
将笔头去除,并将笔芯截短(见图3.6)。
笔芯余下的L段长度大约为5mm,因为悬浮陀螺磁铁的高度为5mm。
图3.5 废旧签字笔笔芯图3.6 去除笔头截短后的笔芯在图3.6中L段缠上宽度为5mm的双面胶(见图3.7)。
注意,此时只用双面胶的胶层(正反两面都有黏性),而不用白色的阻胶层,当L段的直径在双面胶的包裹下达到大约7mm(悬浮陀螺磁铁内径大小)时即可。
图3.7 给L段缠上双面胶将制作好的旋转轴塞入悬浮陀螺磁铁,旋转轴应与磁铁的内壁紧密接触,以保证旋转轴位于陀螺磁铁的中心(见图3.8)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小型陀螺仪
【实验目的】
让学生理解进动现象。
【实验原理】
绕旋转对称轴以很大的角速度转动的陀螺,如果没有外力矩的作用,由于惯性,物体转动轴的方向保持不变。
迅速转动的陀螺受外力矩(如重力力矩)作用时,它并不是立即倾倒,而是转动轴绕着某固定轴缓缓转动,即进动。
由于磨擦等因素使陀螺绕对称轴转动的角速度逐渐变小,才慢慢地倾倒下来。
【实验操作方法】
1、演示角动量守恒:将带框的陀螺仪放在加速器上,踩脚踏开关。
当陀螺仪高速旋转起来时,将陀螺仪拿起,观察陀螺转轴的角度,然后手拿陀螺仪外框的轴向各个方向转动,这时陀螺转轴的角度始终不变。
2、演示刚体的进动:将无框的陀螺仪放在加速器上,踩脚踏开关,当陀螺仪高速旋转起来时,将陀螺仪拿起,放置于底座上,此时,陀螺仪就会绕竖直轴进动。
3、还有几个用陀螺仪演示的角动量守恒小实验,也非常有趣:将旋转的陀螺仪放在斜坡上,它不会倒下,而会沿斜坡下滑;将旋转的陀螺仪倒放在转盘上,放的位置不同,现象也不同。
【注意事项】
在做实验时,请注意安全。
本仪器一般由老师来演示。
1。