在VxWorks嵌入式系统下实现自有协议开发
VxWorks系统下嵌入式显控模块设计与实现中期报告
VxWorks系统下嵌入式显控模块设计与实现中期报
告
一、项目背景
嵌入式系统通常会由一个处理器、相关外设和嵌入式操作系统(如VxWorks)组成。
在这种系统中,操作系统和应用程序通常运行在不同的处理器上,需要通过共享不同的资源、通信和同步来进行交互。
本项目旨在实现一个嵌入式显控模块,该模块将作为VxWorks系统中的一个应用程序运行,用于控制液晶显示屏的显示和触摸控制。
二、项目进展
1.软件设计
(1)系统架构
该嵌入式显控模块将分为两部分:前端部分和后端部分。
前端部分负责与用户进行交互,包括触控屏幕、接收用户输入的指令等。
后端部分负责控制液晶显示屏的显示,调用VxWorks提供的图形库实现图像的显示等。
(2)软件设计流程
软件设计流程如下:
需求分析→设计→编码→测试→文档编写
2.硬件设计
(1)硬件架构
本项目涉及的硬件包括:
(1)液晶屏模块:用于显示图像;
(2)触摸屏模块:用于接收用户的触摸操作;
(3)开发板(STM32F103C8T6):用于控制屏幕和触摸屏模块。
(2)硬件设计流程
硬件设计流程如下:
需求分析→电路设计→ PCB设计→样板制作→原理图生成→
模块生产→接口测试→文档编写
三、下一步工作
1.继续进行软件设计和编码工作,实现嵌入式显控模块的基本功能。
2.进行硬件电路设计和PCB设计,制作出嵌入式显控模块的硬件模块。
3.测试硬件模块和软件模块的性能和稳定性,对系统进行优化和整合。
4.编写项目文档,包括用户手册、硬件设计文档、软件设计文档等。
基于嵌入式操作系统VxWorks的多任务并发程序设计(全)

1引言嵌入式系统定义为:嵌入到对象体系中的专用计算机系统。
“嵌入性”、“专用性”与“计算机系统”是嵌入式系统的三个基本要素,对象系统则是指嵌入式系统所嵌入的宿主系统。
目前,随着高端消费类电子产品(如PDA、手机、智能家电)的普及,嵌入式计算机系统获得了相当广泛的应用。
操作系统在嵌入式软件体系中占据着重要低位,学习和掌握相关的知识是一名嵌入式系统研发人员的必须。
1.1本文的读者对象与写作目的本文针对的读者对象为入门级的嵌入式系统软件开发人员以及其他对嵌入式操作系统感兴趣的朋友,顺利阅读本文需要读者具备的基本知识能力为:(1)熟练的C语言程序设计能力;(2)操作系统的基本知识。
如果读者具备在Windows平台下进行多线程程序设计或者其他嵌入式操作系统本台下进行多任务程序设计的经验,将对阅读本文有很大的帮助。
本文虽然以VxWorks为介绍的主体对象,但是其中所论述的概念和方法并不局限于VxWorks操作系统本身。
它们也同样适用于其它嵌入式操作系统,如WinCE、嵌入式Linux、ucos等,所谓“万变不离其宗”。
笔者力求能以通俗和形象的语言进行论述,但是由于水平有限,文中难免存在错误和纰漏,诚盼读者朋友指正。
1.2 为什么以VxWorks为写作对象之所以选择VxWorks操作系统为本文的写作对象,是因为:(1)VxWorks具备清晰的多任务并发控制及任务间通信的成熟机制;(2)VxWorks有广泛的使用基础,国内外分布着大量的VxWorks程序员;(3)VxWorks简单易学,便于我们集中目标讲解多任务控制程序本身。
1.3 什么是VxWorksVxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),它凭借着良好的可持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据了重要一席。
VxWorks具备高可靠性和实时性,因而被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
嵌入式论文——嵌入式操作系统VxWorks

嵌入式操作系统VxWorks摘要:本文介绍了嵌入式操作系统VxWorks的内部结构和特点,以及跟其他操作系统的进行比较,了解各自的有缺点以及使用的领域,最后对WxWorks进行展望。
关键字:嵌入式操作系统VxWorks1.嵌入式操作系统背景随着计算机技术的迅速发展和芯片制造工艺的不断进步,嵌入式系统的应用日益广泛:从民用的电视、手机等电路设备到军用的飞机、坦克等武器系统,到处都有嵌入式系统的身影。
在嵌入式系统的应用开发中,采用嵌入式实时操作系统(简称RTOS)能够支持多任务,使得程序开发更加容易,便于维护,同时能够提高系统的稳定性和可靠性。
这已逐渐成为嵌入式系统开发的一个发展方向。
2.什么是VxWorksVxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统,是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
3.VxWorks的组成VxWorks操作系统包括了进程管理、存储管理、设备管理、文件系统管理、网络协议及系统应用等几个部分。
VxWorks只占用了很小的存储空间,并可高度裁减,保证了系统能以较高的效率运行。
VxWorks由以下几个主要部分组成:3.1高性能的实时操作系统核心windVxWorks的核心,被称作wind,包括多任务调度(采用优先级抢占方式),任务间的同步和进程间通信机制以及中断处理,看门狗和内存管理机制。
一个多任务环境允许实时应用程序以一套独立任务的方式构筑,每个任务拥有独立的执行线程和它自己的一套系统资源。
vxworks 程序开发实践

vxworks 程序开发实践VxWorks程序开发实践在现代软件开发领域中,实时操作系统(RTOS)被广泛应用于各种嵌入式系统中。
VxWorks是一个广受欢迎且强大的实时操作系统,它提供了许多功能和工具,可帮助开发人员构建高效可靠的嵌入式应用程序。
本文将深入探讨VxWorks程序开发的实践,详细介绍使用该系统进行开发的步骤和技巧。
第一步:项目准备在开始VxWorks程序开发之前,我们需要准备好所需的硬件和软件资源。
首先,我们需要选择适合项目需求的VxWorks版本。
VxWorks提供了许多不同版本以满足不同的嵌入式应用场景。
在选择版本时,我们应该考虑硬件平台的兼容性和所需要的功能。
其次,我们需要确保拥有适当的开发工具和文档。
VxWorks提供了VxWorks工作台和Tornado IDE等工具,这些工具能够提供强大的开发环境和调试支持。
此外,VxWorks还提供了详细的开发文档,包括用户指南、API参考和示例代码,以帮助开发人员更好地理解和应用系统。
第二步:项目设计在进行VxWorks程序开发之前,我们需要仔细设计我们的项目。
这包括确定项目的需求和功能,以及定义适当的软件架构和模块划分。
我们应该明确每个模块的职责和接口,以便实现高内聚和低耦合的设计。
此外,我们还需要考虑系统的实时性和可靠性需求,以确保我们的设计能够满足这些需求。
我们可以使用UML图或流程图等工具来辅助我们的设计过程。
第三步:开发环境设置在进行VxWorks程序开发之前,我们需要设置好正确的开发环境。
首先,我们需要安装和配置VxWorks工作台或Tornado IDE。
这些工具可以帮助我们创建和管理项目,以及进行代码编译和调试。
其次,我们需要配置正确的目标硬件和连接方式。
这包括选择适当的开发板和连接器,并设置好正确的连接参数。
最后,我们需要设置好合适的编译工具链和编译选项。
这些工具和选项可以确保我们的代码能够正确地编译和链接到目标系统。
嵌入式实验指导书-VxWorks
《嵌入式计算机系统》VxWorks实验指导书编写:魏晓敏西北工业大学2013年11月实验一基于VxWorks的多任务设计第一部搭建VxWorks开发环境VxWorks 是专门为实时嵌入式系统设计开发的操作系统软件,为程序员提供了高效的实时任务调度、中断管理、实时的系统资源以及实时的任务间通信。
VxWorks是种功能强大而且复杂的操作系统,仅仅依靠人上编程调试,很难发挥它的功能并设计出可靠、高效的嵌入式系统,必须有与之相适应的开发工具。
Tornado就是为开发基于VxWorks 的应用系统而提供的集成开发环境,Tornado中包含的工具管理软件,可以将用户自己的代码与VxWorks 的核心系统有效地组合起束,从而轻松、可靠地完成嵌入式应用厅发。
Tornado是Windriver 公司开发的嵌入式软件开发环境。
Tornado开发环境的最新版本是2.2 ,它在延续了Tornado2.0 开发环境的基础上,增加了更多易于使用、性能优异的工具,因此在商业上取得了较大成功,获得了用户的好评。
Tornado开发环境是嵌入式实时领域里最新的开发调试环境,是编写嵌入式实时应用程序的完整的软件开发平台。
它给嵌入式系统开发人员提供了一个不受目标机资源限制的超级开发和调试环境a。
它包含3 个高度集成的部分:●运行在宿主机和目标机上的强有力的交叉开发工具和实用程序●运行在目标机上的高性能、可裁剪的实时操作系统VxWorks●连接宿主机和目标机的多种通讯方式,如以太网、串u线、ICE 或ROM 仿真器VxWorks的开发环境为Tornado,我们实验室用的是Tornado2.2。
包括Wind_River_tornado2.2.1_vxworks5.5.1 和Wind_River_vxworks5.5.1_BSP_drivers 两部分,需要分别安装,安装的顺序是先安装VxWorks5.5.1,再安装BSP包。
1.1Tornado安装步骤1.1.1 获取Tornado安装文件Tornado安装文件,包括 TORNADO2.2 和BSP的文件,可以从网上下载(/ShowFile.asp?FileID=62525)。
ARM嵌入式VxWorks实践教程课程设计

ARM嵌入式VxWorks实践教程课程设计课程概述本课程旨在介绍ARM嵌入式VxWorks操作系统的使用和实践。
VxWorks是实时操作系统(RTOS)的代表,被广泛应用于航空、能源、医疗等行业。
本课程将通过理论和实践相结合的方式,让学生了解VxWorks的基本原理和应用方法,并且亲身体验VxWorks在ARM嵌入式系统上的运行。
课程内容本课程分为理论和实践两个部分。
理论部分1.VxWorks概述:介绍VxWorks操作系统的发展历程、结构、特点和应用范围。
2.VxWorks基本组成:介绍VxWorks内核、文件系统、网络协议栈等基本组成部分的作用和特点。
3.VxWorks彩票调度算法:介绍VxWorks的彩票调度算法,让学生了解VxWorks任务调度的原理和方法。
4.VxWorks应用开发:介绍如何使用VxWorks进行应用开发,包括任务创建、消息队列、信号量、互斥量等基本应用方式。
实践部分1.环境配置:学生需要在Linux操作系统上安装交叉编译工具链和VxWorks仿真器,配置好开发环境。
2.简单例子:学生编写一个简单的VxWorks应用程序,能够在仿真器上运行。
3.TCP/IP通信:学生编写一个TCP/IP通信的应用程序,通过网络协议栈实现两台开发板之间的通信。
4.多任务调度:学生编写一个多任务调度的应用程序,演示VxWorks彩票调度算法的应用。
5.实时控制:学生通过引脚控制板上的LED灯,演示VxWorks实时控制能力。
实验设备1.ARM开发板:使用STM32F407开发板,搭载ARM Cortex-M4内核,提供了丰富的外设接口和扩展板槽,适合实时控制和通信应用。
2.仿真器:使用Wind River提供的VxSim仿真器,能够在Linux平台上仿真VxWorks操作系统和应用程序。
3.其他外设:必要的OLED屏幕、按键和LED灯等外设。
实验流程1.学习理论部分,了解VxWorks操作系统的基本原理和应用方法。
VxWorks嵌入式系统下SNMP的开发
D EFAUL T next2f unction2async t ut Ex - nextproc D EFAUL T cookie (char 3 ) NULL 31 使用 mibcomp 工具编译 mib 库 , 生成 c 代码 (1) 检查 mib 中是否有语法错误 。 这一步是对要转换的 mib 进行语法检查 , 它可 以帮助我们检查一些疏忽的语法错误 。
FORCE2INCL UD E < wrn/ wm/ snmp/ vxagent/ t ut Ex - mibleaf1h >
D EFAUL T get2f unction2async t ut Ex - getproc D EFAUL T set2f unction2async t ut Ex - setproc D EFAUL T test2f unction2async t ut Ex - testproc
21 将 example1mib 改 写 为 Windmanage snmp 的格式 就是在 “EXAM PL E2M IB ”和 “D EF IN ITIO2 NS : : = B EGIN”之间添加以下语句 :
FORCE2INCL UD E < st dio1h > FORCE2INCL UD E < types1h > FORCE2INCL UD E < wrn/ wm/ snmp/ engine/ asn11h > FORCE2INCL UD E < wrn/ wm/ snmp/ engine/ mib1h > FORCE2INCL UD E < wrn/ wm/ snmp/ engine/ snmpdef s1h > FORCE2INCL UD E < wrn/ wm/ snmp/ engine/ snmp1h > FORCE2INCL UD E < wrn/ wm/ snmp/ engine/ auxf uncs1h > FORCE2INCL UD E < wrn/ wm/ snmp/ vxagent/ t ut Ex - skel1h >
嵌入式操作系统VxWorks下CAN驱动程序开发

通 过 设 置 时钟 分 频 寄存 器 实现 。 ( ) 片 内 部 寄存 器 与 初 始 化 2芯
S A1 0 J 0 0控 制 器 工 作 模 式 的设 定 、 送 数 据 和 接 收 数 据 都 发
目前 流行 的控 制 嵌 入 式 操 作 系统 有很 多 种 ,但 是用 于 控 制 开 发 , 作 系统 的 实 时性 和 健 壮 性 是最 根 本 的要 求 , V W ok 操 而 x rs 操 作 系 统 就 是在 工 控 应 用 中运 行 的 很 成 功 的 一 套 嵌 入 式 实 时 操 作 系统 。同 时 ,在 工 控 领 域 正 在掀 起 用 现 场 总 线 控 制 系 统 F S C 改 造集 散 控 制 系统 DC S的 热 潮 。在 众 多 现 场 总 线 协 议 中 , AN C
分 数 据 中 , 有 仲裁 场 、 制场 和 数 据 场 是需 要 在 程 序 开 发 中 具 只 控
S A1 0 J 0 0具 有 两 种 工 作 方 式 :基 本 C N 工 作 模 式 B sc A ai — C N, 种 模 式 是 S A1 0 的 默认 工 作 模 式 ; 强 型 工 作 模 式 A 这 J 00 增
维普资讯
3 0
嵌 入 式 操 作 系统 V Wok x rs下 C N 驱 动程 序 开 发 A
嵌人式操作系统 V Wok 下 C N驱动程序开发 x rs A
E eo v lpme t o CAN Dr e n e n f i ru d rEmb d e ea in S se V W o k v e d d Op rt y tm x rs o
VxWorks嵌入式实时操作系统的原理和实现_王金辉
VxWorks 嵌入式实时操作系统的原理和实现王金辉(中国电子科技集团公司第54研究所,河北石家庄050081)摘 要 介绍了VxWorks 作为嵌入式实时操作系统具有的功能和特点。
分析了VxWorks 的任务调度管理机制,如何创建、管理任务、任务状态的切换、任务的优先级等。
分析了VxWorks 的任务间通信的机制,如何创建邮箱、收发邮件等,以及消息传递采用的方式。
介绍了VxWorks 在实际应用中的工程实现步骤和调试过程,同时介绍了几个重要概念(bootRom Image 、bsp 等)。
关键词 VxWorks;嵌入式实时系统;bootRom Image;bsp中图分类号 TP31612 文献标识码 A 文章编号 1003-3106(2007)01-0062-03Theory and Realization of VxWorks OSWANG Jin -hui(T he 54th Research Institute of CETC,Shijia zhuan g Hebei 050081,China)Abstract T his paper introduces the feature of VxWroks as embed operating system,analyses mechanis m of VxWorks task,how to create and manage tasks,and priori ty of task.It also analyses mechanism of communication between tasks,how to create mail box ,how to receive and send mail,and the method to send message,as well as the step of realize in application and process of debug,and some important conceptions (bootRom Image,bsp).Key words VxWorks;operation system of embedding;bootRom Image;bsp收稿日期:2006-03-090 引言随着科学技术的不断快速发展和对事件处理实时性要求的提高,在目前的通信产品开发中,功能相对单一的单片机(如C51)已经逐步被功能强大的嵌入式处理器代替。
基于VXWORKS的嵌入式开发技术

等待某种资源
被中断,用于调试
2012-7-2
27
实时操作系统
2012-7-2
7
与非实时操作系统的区别
基于优先级抢占的调度 高效、快 小,可配置
2012-7-2
8
实时操作系统中的概念
多任务 调度 优先权 时间片 通信和同步 资源共享 事件 互斥 信号量 邮箱
2012-7-2
9
多任务
目的:优化系统资源(CPU 时间、内存、磁盘、驱动 器...)的使用 多任务 OS 允许多个任务并发和独立地在系统上运行 实现独占和共享系统资源 根据所需的输入/输出资源,控制任务执行 任务(Task)、Process、Thread
系统错误处理 硬件事件管理 设备驱动器 最短 用户任务 最长 注释 唯一重要的优先权是任务 之间的相对优先权
2012-7-2
14
通信和同步
任务互操作,以便合作完成公共活动 目的
管理任务间共享的系统资源,避免系统死锁
2012-7-2
15
资源共享
资源可以是
软件或硬件 局部(仅在一个任务内使用)或公用 能共享的资源有最大的进入能力
2012-7-2
3
实时系统
时间约束是相对的 关键因素:系统对外部激励的响应时间
软件 领 工程 科学 事物 诊断 信号 物理 进程 飞行器 遥测 域 测试 处理 测量 仿真 仿真 计算 时间 1s 100ms 10ms 1ms 100s 50s 10s 1s 实时 医疗 应 飞行 导弹 工业 地震 网络 财务 用 系统 处理 测试 自动化 分析 控制 仿真 仿真 开发 分析
2012-7-2 4
计算机系统的组成
嵌入式实时操作系统VxWorks

目录
• VxWorks操作系统概述 • VxWorks系统核心功能 • VxWorks开发环境与工具 • VxWorks系统设计与实践
目录
• VxWorks系统案例分析 • VxWorks与其他实时操作系统的比较
01
VxWorks操作系统概述
定义与特点
定义
VxWorks是一种高性能、可扩展的实 时操作系统(RTOS),专为嵌入式系 统设计。
资源占用
Linux通常需要更多的内存和存储资源,不太适合资源有限 的嵌入式系统。VxWorks则更为紧凑。
开放性
Linux是开源的,拥有庞大的社区支持和丰富的软件资源。 VxWorks的源代码不公开。
VxWorks与QNX的比较
实时性
VxWorks和QNX都具备出色 的实时性,能够满足严苛的 实时需求。两者在微秒级别 内都能快速进行任务调度和
内存分区管理
VxWorks将内存划分为多个分区,每个任务占用一个 独立的内存分区,避免内存冲突。
内存保护机制
通过内存保护机制,确保每个任务的代码和数据不会 互相干扰。
动态内存分配
提供动态内存分配函数,允许任务在运行时申请和释 放内存。
系统优化与性能测试
代码优化
通过优化任务代码,降 低系统开销,提高实时 性。
中断处理优化
优化中断处理程序,减 少中断延迟,提高系统 响应速度。
性能测试与评估
通过实际测试和评估, 验证系统性能是否满足 实时性要求。
05
VxWorks系统案例分析
案例一:无人机飞控系统
无人机飞控系统需要实时响应、高可 靠性和可扩展性,以满足飞行控制和 导航的需求。
嵌入式实时操作系统VxWorks入门_开发环境构建
嵌入式实时操作系统VxWorks入门――开发环境构建VxWorks 操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
在美国的F-16、FA-18 战斗机、B-2隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器上也使用到了VxWorks。
VxWorks原先对中国区禁止销售,自解禁以来,在我们的军事、通信、工业控制等领域得到了非常广泛的应用。
VxWorks 的实时性体现在能于限定的时间内执行完所规定的功能,并能在限定的时间内对外部的异步事件作出响应。
因此,实时性系统主要应用于过程控制、数据采集、通信、多媒体信息处理等对时间敏感的场合。
本文将对这个操作系统进行一个入门级的、全面的介绍。
为力求展示其全貌,全文共分五章:(1)搭建VxWorks嵌入式开发环境;(2)简要介绍VxWorks的基本组成,内核的基本结构;(3)概述VxWorks板级支持包(BSP)的概念及VxWorks的启动过程;(4)介绍VxWorks设备驱动的架构及编写方法;(5)指明VxWorks应用开发的思路,任务调度及任务同步、中断与任务的同步机制。
以上各章中将贯穿着许多实例,由于本文定位于入门级教程,所以文中的实例都将十分简单。
下面我们进入第一章内容的讲解。
如图1,嵌入式系统的调试方法一般为通过PC(宿主机)上的集成开发环境交叉编译针对特定电路板(目标机)的程序,然后将程序通过目标板的JTAG、串口或网口等途径下载到目标板上运行。
因此,为了构造一个嵌入式系统的学习环境,拥有一块包含CPU、存储器及I/O电路(构造计算机系统)的目标电路板往往是必要的。
虽然许多集成开发环境附带模拟软件,但仅限于指令集的模拟,均无法模拟物理的目标机硬件平台,因而在其上只能进行应用程序的象征性模拟开发。
基于ARM7的VxWorks嵌入式操作系统开发平台的设计与实现
基于ARM7的VxWorks嵌入式操作系统开发平台的设计与实现摘要:本文介绍了基于ARM7的VxWorks嵌入式操作系统开发平台的设计与实现。
首先,介绍了VxWorks嵌入式操作系统的特点和应用领域。
然后,详细阐述了ARM7处理器的特点和其在嵌入式系统中的应用。
接着,重点讲解了基于ARM7的VxWorks开发平台的设计与实现,包括硬件选型、软件配置和开发环境的搭建等。
最后,通过实际应用案例验证了该开发平台的可行性和有效性。
关键词:ARM7;VxWorks;嵌入式操作系统;开发平台;设计与实现一、引言嵌入式系统作为现代信息技术的重要组成部分,在各个领域都发挥着重要作用。
而VxWorks作为一款成熟稳定的嵌入式操作系统,被广泛应用于工业自动化、通信、航空航天等领域。
本文旨在基于ARM7处理器设计并实现一套适用于VxWorks的嵌入式操作系统开发平台,以满足不同领域的需求。
二、VxWorks嵌入式操作系统的特点和应用领域VxWorks嵌入式操作系统具有高可靠性、实时性强、灵活性高等特点,适用于对实时性要求较高、资源有限的嵌入式系统。
它被广泛应用于工业自动化、网络通信、医疗设备、交通运输等领域。
三、ARM7处理器的特点和应用ARM7处理器作为一款经典的嵌入式处理器,具有低功耗、高性能、易扩展等特点,广泛应用于嵌入式系统中。
其先进的架构和丰富的外设接口使得ARM7成为VxWorks开发平台的理想选择。
四、基于ARM7的VxWorks开发平台的设计与实现1. 硬件选型:根据实际需求选择适合的ARM7处理器及相关外设,确保系统性能和稳定性。
2. 软件配置:根据VxWorks操作系统的要求,进行相关软件配置,包括内核、驱动程序、文件系统等。
3. 开发环境搭建:建立适合VxWorks开发的集成开发环境,包括编译器、调试器、仿真器等。
4. 系统调试与优化:通过调试和优化,确保系统的稳定性和性能。
五、实际应用案例以某工业自动化设备为例,利用基于ARM7的VxWorks开发平台进行系统开发和集成。
基于VXWORKS的嵌入式开发设计讲义
(6)WindView
(7)Simulator
四、单盘软件主要应用举例
MCU的初始化流程
将以下划分的各个功能模块依次添加到UserAppInit()函数中以完成各单盘的上电初始化过程,在各个功能模块中按照单盘的具体情况填写相应程序段。
如果需要其他特殊功能模块可以在适当的位置自行添加。
UCHAR Mode;
} SetLogicSubnetReqStruct;
void Oam_SetLogicSubnet_Req(UCHAR* pMsg)
{
DatagramHead *pDatagramHead;
UCHAR *pData;
SetLogicSubnetReqStruct *pSetLogicSubnetReq;
2、满足应用对时间的响应要求
3、多任务内核(实时调度、任务间通信、互斥访问)
4、标准库文件
5、可抢占式调度、快速、系统小而且可配置
6、所有任务工作在同一个地址空间内,所有任务运行在特定优先级模式
7、VxWorks开发环境Tornado
(1)Launch
(2)WindSh
(3)CrossWind
(4)Browser
#ifdef INCLUDE_NVRAM
getCpmMacAddr(buff, MAX_ADR_SIZE);
……
}
4、测试
(1)单元测试(在单机上测试)
(2)联调(主要测试接口)
(3)系统调试(测试功能)
三、VxWorks嵌入式实时操作系统
1、BSP(Board Support Package)的概念
一、嵌入式系统简介
1、嵌入式系统的基本特征
嵌入式系统VxWorks中针对X86开发
嵌入式系统VxWorks中针对X86开发
VxWorks操作系统是美国WindRiver公司于1983年设计开发的一种嵌入式实时操作系统(RTOS),是嵌入式开发环境的关键组成部分。
良好的持续发展能力、高性能的内核以及友好的用户开发环境,在嵌入式实时操作系统领域占据一席之地。
它以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。
实时嵌入式操作系统VxWorks已经在国内的嵌入式系统开发中占据着重要的地位,特别是在通信行业中。
在通信设备中,一般都是无头设备,所谓无头设备是指不外接显示器,也不外挂键盘的,那幺这个时候一般采用串口作为其输入输出的用户操作接口。
怎幺将串口转换为标准输入输出的用户操作接口,此时就出现了标准输入输出的重定向问题,笔者在VxWorks的开发中,曾多次碰到此问题,并就此问题进行了一些研究,也有一些心得。
VxWorks5.4中的输入输出重定向。
以ARM为例的Vxworks开发工具的使用操作流程

以ARM为例的Vxworks开发工具的使用操作流程一.认识Tornado II和VxworksVxWorks是一种嵌入式的实时操作系统,所谓嵌入式系统就是用户自己开发设计板子,板子上通常有一颗CPU,VxWorks支持32位的CPU,包括Intel公司的x86、Motorola公司的68k和PowerPC、MIPS、ARM、Intel公司的i960、Hitachi公司的SH。
我们设计的板子通常没有软件的自开发能力,所以我们需要一台通用机来辅助开发,这台通用机可以是PC 或工作站,我们称辅助我们软件开发的通用机为宿主机(Host),用户自己开发的板子为目标机(Target)。
宿主机上要有一个集成开发环境(IDE)来辅助我们的软件开发,这套集成开发环境可以运行在Windows95/NT或 UNIX下,包括交叉编译器(Cross Compiler)和交叉调试器(Cross Debugger),所谓交叉编译器就是在宿主机上编译生成可以在目标机上运行的代码IMAGE,交叉调试器就是通过宿主机和目标机之间的某种耦合方式实现前后台调试。
我们称宿主机上的这套集成开发环境为Tornado,编译生成的目标机上的可执行代码IMAGE为VxWorks。
在系统安装的时候,集成调试环境和VxWorks的原材料(一些obj文件)都安装到宿主机上,编译生成的在目标机上运行的IMAGE内包含操作系统。
二.Tornado II IDE的主要组成Tornado II IDE的主要组成部分有:1.集成的源代码编辑器(可惜不支持汉字输入)。
2.工程管理工具。
3.集成的C和C++编译器和make工具。
4.浏览器,用于收集可视化的资源,监视目标系统。
5.CrossWind,图形化的增强型调试器。
6.WindSh,C语言命令外壳,用于控制目标机。
7.VxSim,集成的vxworks目标机仿真器。
8.WindView,集成的软件逻辑分析仪。
9.可配置的各种选项,可以改变归Tornado GUI的外观等。
在VxWorks嵌入式系统下实现自有协议开发
在VxWorks嵌入式系统下实现自有协议开发
吴斌
【期刊名称】《广西通信技术》
【年(卷),期】2007(000)002
【摘要】本文主要讲解如何通过VxWorks的MUX(多元网络接口)实现自有协议的开发.
【总页数】4页(P51-54)
【作者】吴斌
【作者单位】中国电子科技集团公司第三十四研究所,广西,桂林,541004
【正文语种】中文
【中图分类】TN915.04
【相关文献】
1.嵌入式系统VxWorks下汉字输入法的研究与实现 [J], 韩改宁;李永锋;张西
2.VxWorks下SNMP协议的分析与实现 [J], 罗会洪;陈茂忠;陈刚
3.在VxWorks嵌入式系统下实现自有协议开发 [J], 吴斌
4.在VxWorks嵌入式系统下实现自有协议开发 [J], 吴斌
5.VxWorks下多协议转换硬件电路及其驱动设计与实现 [J], 方盈;翟正军;陈康因版权原因,仅展示原文概要,查看原文内容请购买。
vxworks 程序开发实践 -回复

vxworks 程序开发实践-回复VxWorks是一款由美国飞利浦公司(Wind River)开发的实时操作系统(RTOS),被广泛应用于嵌入式系统开发领域。
它具有高度可靠、快速响应和高度定制的特点,被广泛应用于航空航天、汽车、工业控制等领域。
在本篇文章中,我们将介绍VxWorks的程序开发实践,以帮助读者更好地了解和掌握这款操作系统。
首先,我们需要了解VxWorks的开发环境。
VxWorks支持多种开发环境,其中最常用的是Tornado工具套件。
Tornado提供了一套完整的开发工具,包括编译器、调试器和仿真器等。
开发者可以使用Tornado工具套件进行代码编写、编译、调试和部署等操作。
在开始开发之前,我们需要明确我们的开发目标。
VxWorks可以用于开发各种类型的嵌入式系统,例如实时控制系统、通信系统和网络设备等。
因此,在开始开发之前,我们需要明确我们的应用场景和需求,以便选择合适的编程语言和开发工具。
在选择编程语言方面,VxWorks支持多种语言,包括C、C++和Ada等。
C是最常用的编程语言之一,它具有广泛的应用和强大的性能。
C++是一种面向对象的编程语言,可以更好地组织和管理复杂的代码结构。
Ada是一种用于高可靠和高可维护系统的编程语言,特别适合于航空航天和国防领域。
在编写代码之前,我们需要了解VxWorks系统的基本架构和特性。
VxWorks采用内核和用户空间的分离设计,内核负责处理硬件和操作系统功能,用户空间用于编写应用程序。
用户程序可以通过系统调用接口访问操作系统提供的功能,例如创建任务、申请内存和发送消息等。
接下来,我们将介绍VxWorks的任务管理和调度机制。
任务是VxWorks 中最基本的执行单元,具有独立的代码、数据和栈空间。
开发者可以使用任务管理接口创建和销毁任务,以及设置任务的优先级和调度策略。
VxWorks提供了多种任务调度算法,包括优先级调度、轮转调度和时间片调度等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旦 !重 ! 【 鱼童5 蜥
ⅢL c I a dD r
墓
—
—
设各所含清单申删
多点侮 差地
删斓C dGt a re()【 获取设各清单列表中的多点传送 地址  ̄xoled P lSn () I 轮询模式投送数据包
删枷 d打Ad d d () 为设备所 含清单 添加一多点传送地址
Vod mu Bi d i x n
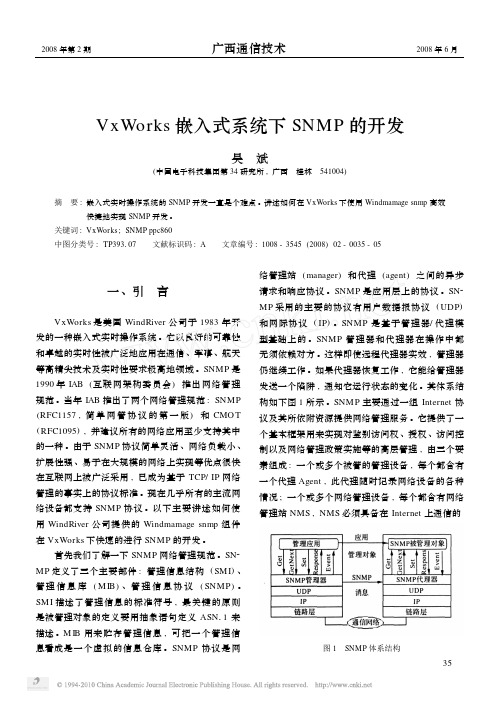
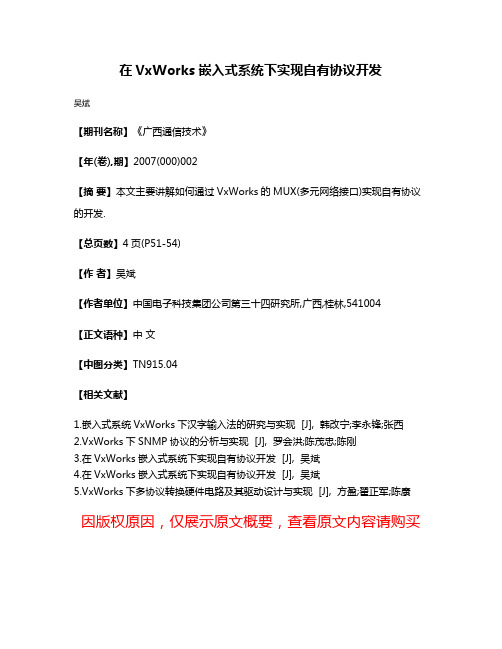
络 驱 动 , 而使 它 们 几乎 独 立 彼 此 。 种 使 增 加新 的 网络驱 动 和 从 这 协 议 变 得 简单 。如 想 添 加 一 个 新 的 E D( N 网络 驱 动 )所 以现 有 , 基 于 M X 的协 议 可使 用 新 的 网 络驱 动 。相 同 的 , 增 加 一 个 U 如想 新 的基 于 MU 的协议 , 何 现 有 的 E D均 可 通 过 MU X 任 N X来 访 问
层 的特 点是 :它 可 以完 全屏 蔽 嵌 入 式 系 统 的底 层 网 络 驱动 和上 层 协 议 的 关联 , 网络驱 动 程 序 和协 议 之 间 没有 内部 交 换数 据 , 使 它们 只 能 通 过 MU 间接 相 互 作 用 。 图 1展 示 了协 议 、 X、 X MU 网
络 驱 动 之 间 的关 系 。 由此 可 以看 出 MU X的 目的是 分 解 协议 和 网
大 吴 斌 ( 桂林激 光研 究所第 一事业 部 , 西 桂 林 5 10 ) 广 404
【 摘要】 文章 主要讲 解如何 通过 V Wok 的 MUX( x rs 多元 网
络接 口) 实现 自 协 议 的 开发 。 有 【 关键词】 x rsMUX; V Wok; 自有协议
A I 协议、 P和 网络 驱动 A I P 的调 用关 系 。 头 表 示 每 个调 用 程 序 箭
删 oleev() l 1Rcie 轮询模式{I 妾
m ̄ o t () x cl l 3 访问控制函数
包
时, 网络驱动也要进行修改 。 这给系统 的开发和维护增加了很多 的难 度 。 V Wok , N 砌V R提 供 了 一个 MU 层 。 X 在 x rs中 WI D E X MU
维普资讯
20 年第 6期 07 ( 总第 5 8期 )
职 业 圈
ZHl YE QUAN
NO. 2 0 6, 0 7
( u uai tN .8 C m lt ey O5 ) V
在 V W ok 嵌 入 式 系统 下 实现 自有协议 开发 x rs
■-Ⅷ !
’ ●
) , S A U a kh to n t( od p oke vi #pr) T T Ss c S udw Rn vi C oi, o t d ae , 关 闭 函数 } , S A U a k et tt( od E D vi Pp r , 复 T T Ss c R s r n vi p N , od sae t aR ) 位 函数 ,
— _ _
p n Hd ,  ̄ k r
v i p a b c l od C l a kd l
图 1 议 、 U 网络 驱 动 之 间的 关 系 协 M X、
二 、 X的分析 MU
下 面我 们对 V Wok 的 MU 进行 简要 的分析 。 2 示 为 x rs X 图 所 V Wok 系统 中 MU 协 议 和网络驱 动各标 准 A I 间的关 系。 x rs X、 P之
l 帆Ⅸ出错处理函数 f 从协议中接收数据包然后传递给设备
可靠性和卓越 的实时性被广泛地应用在通信 、 军事 、 航天等高精 尖技 术 及 实 时性要 求 极 高 地 领域 。经 过 数 十年 的发 展 完 善 , x V—
Wo 嵌 入 式操 作 系 统 已 经成 为实 时嵌 入 式 系统 的事 实 上 的工 s 业 标 准 和 军用 标 准 。 自有协 议 的 开 发一 直是 嵌 入 式 系 统 开 发 的 难 点 。 在传 统 的 嵌 入 式 系统 中底层 网络 驱 动 和协 议 是 紧 密 相 关 的。 当 协议 改 变
表 1MUX I的功 能 AP
三 、 议的 实现 协
任何 要 接 收 数 据包 的协 议 首先 要 将 其 比绑 定 到 MU 上 , X 通 过 MU 和 设备 连接 起 来 。 议 通 过调 用 m x id ) 完成 这 个 X 协 u Bn (来
工 作 。 下 面 为 muBn ( 的原 型 : x id )
的入 口点 。 如 m xe d ) 用 e de d ) 注 意 到 , 议通 过 调 例 u Sn (调 n Sn ( 。 协 用 m xe d ) u Sn ( 开始 传 送 , 图 2中并 没 有 指 出它 的 协 议 程 序 名 。 但
此 程 序 为 非标 准 A I P。
【 中图分类号 】 P 9 T 33
【 文献标识】 A
【 文章编号】6 1 5 6 ( 07 O 一 1 8 O 17 — 99 2 0 )6 O7 一 2
一
M U 层 各标 准 A I 功 能如 下表 1 X P的 :
^ 入 式操 作 系 统是 美 国 WI D E ( 河 公 司 ) x  ̄s N 砌V R 风 公 司于 18 9 3年开 发 的 一种 嵌 入 式 实 时 操 作 系统 。 以 其 良好 的 它
 ̄ id n ()  ̄x n id U b n () m ̄ela() x vod D ⅢI e u 1 ( LD v n∞d ) x  ̄ e e v () eie
 ̄ r o () rr mt d ) x  ̄n (
: MX 为 U 添加一协议 从帆Ⅸ卸载一协议 } 加载—设各 J 卸载 —设各 从设各向l Ⅸ L 传递数据包
(
c a p a e hr N m , it n ui n4 B 0 fs cR v t) 0 L *t k cRn a 设 备 名 ,
设 备单 元 号 } ,
接 收 函数 } /
新 的协议。
(
v i p d ln y e M BL I p e B f, —HDR I O od En , o g t p , K D N t u U NF