高空作业车工作臂结构设计及有限元分析
轻巧型曲臂高空工程作业车整体结构的设计
与改进 [ ] 起重运输机械 ,19 ( ) 0— 2 J. 9 8 8 :3 3 .
( 中底座 高 12m,机 臂伸 展 高度 为 78m) 其 . . ;从
工作 平 台达 到水 平 最 大 距 离 时 杆 的位 置 ,可 以确 定机 械手 臂水 平达 到 的最远距 离 为 4 2m。 . 2 2 建立 计算 模型 . 2 2 1 机 械手臂 各杆 件强 度分 析 . . ( )工况 分析 1 由于 高空作 业 车 要 在 所 有 工 况 下 ,均 能 在 额
传 统 的高 空 作 业 车 的 区别 在 于 其 轻 巧 、多 折 叠 曲
臂 、履 带 自行式 且人 在 车外控 制其 行走 的特 点 。
2 机 械 手臂 结构 的 设 计 和 分 析
2 1 确 定设 计计 算状 态 .
负载 20k ,上 升最 高工 作位 置 9m,水 平 最 0 g 低 了设 备 运 行 阻力 ,改 善 了设 备 运 行 状 况 ,延 长 了设备 的使 用 寿命 ,保 障 了 企 业 的正 常生 产 ,经
轻 巧 型 曲臂 高空 工 程 作 业 车整 体 结 构 的设 计
孙 骅 王业 潘
广 州大 学机 电工程 学 院
摘
广州
500 10 6
要 :以高空工程作业 车为设 计对象 ,在设计 过程 中突 出 “ 、巧 ” 的特点 ,通 过对其 力平 衡 、速度 、 轻
位置 、传动与制动系统 的分析 ,对机械手臂结构 、行走机构 、曲臂 回转机 构 、工作平衡 支撑机构 的设计 与分析 , 介绍一种新式轻巧型 曲臂高空工程作业 车整体结构设计 。 关键词 :曲臂高空工程作业车 ;轻巧 型;机械手臂 ;履带式底盘 ;平衡机构
基于有限元分析的高空作业平台机架结构设计
作者简介 : 周元枝 ( 1 9 6 8一 ) , 男, 江西庐江人 , 机械工程师 , 讲师 , 合肥工业大学硕士在读硕士研究生 , 研究方 向为数控加工 技 技学 院学报 ( 自然科学版)
2 0 1 3 年8 月
基 于有 限元 分 析 的 高 空作 业 平 台机 架 结 构 设 计
周 元 枝 ’
( 1 . 安徽 机 电职 业技 术 学院 ,安徽 芜 湖 2 4 1 0 0 0 ; 2 . 合肥 工业 大学 ,合肥 2 3 0 0 0 9 )
载 荷 重 新 识 别 加 载
1 机 架 设 计 方 案
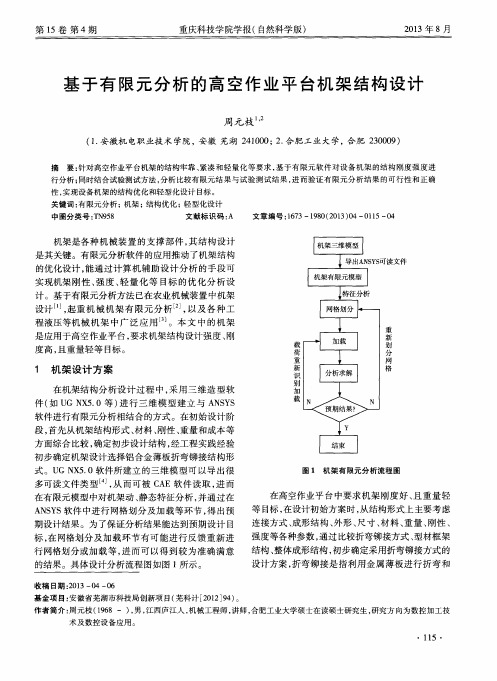
在机 架结 构 分 析设 计 过 程 中 , 采 用 三 维 造 型 软 件( 如U G N X 5 . 0等 ) 进行 三维模型建立与 A N S Y S
软件进行有限元分析相结合 的方式 。在初始设计阶
段, 首 先从 机架 结 构形 式 、 材料 、 刚性 、 重 量 和成 本 等 方 面综 合 比较 , 确定 初 步设 计结 构 , 经工 程实 践 经 验 初 步确 定 机架设 计 选择 铝合 金 薄板 折 弯铆接 结 构 形 式 。U G N X 5 . 0软 件所 建 立 的 三维 模 型 可 以 导 出很 多 可读 文件 类 型 j , 从而可被 C A E软 件 读 取 , 进 而 在有 限元模 型 中对 机架 动 、 静态 特征 分析 , 并 通 过在
[ 3 ]张剑寒 , 曾攀 , 颜永年 , 等. 4 0 0 MN航 空模锻 液压机机 架 有限元 分析 [ J ] .锻压技术 , 2 0 0 9 ( 4 ) : 9 3 - 9 6 .
9高空作业车部件伸缩臂结构分析设计
66
2012 年供电企业带电作业技术研讨会论文集
二位二通电磁阀。两处电磁换向阀分别由设在支腿处的接近 开关和设在臂支架处的行程开关控制, 实现支腿没有支撑稳固时,无法操作工作臂;工作臂离开臂支架后,即使操纵下车多路阀也不能收 支腿。避免由于误操作造成作业车的倾翻。
图 1-2 16 米高空作业车液压系统图 1.4.3 电气系统
高空作业车变幅是指改变工作平台到回转中心轴线之间的距离,这个距离称为幅度。变幅机构 扩大了高空车的作业范围,由垂直上下的直线作业范围扩大为一个面的作业范围。高空作业车变幅 机构一般采用液压油缸变幅。
高空作业车的一部分(一般指上车部分或回转部分)相对于另一部分(一般指下车部分或非回 转部分)做相对的旋转运动称为回转。为实现高空作业车的回转运动而设置的机构称为回转机构。 它是由液压马达经减速器将动力传递到回转小齿轮上,小齿轮既作自转又作沿着固定在底架上的回 转支承大齿圈公转,从而带动整个上车部分回转。有了回转运动,从而使高空作业车从面作业范围 又扩大为一定空间的作业范围。
高空作业车按其行走方式分为两大类,即采用专用汽车底盘的车载式高空作业车和采用四轮驱 动自走行式的高空作业车。采用改装汽车底盘的车载式高空作业车按其结构方式又可分折叠壁式高 空作业车、直臂式高空作业车和混合壁式高空作业车以及剪叉升降式高空作业车;按其工作性质又 可分绝缘式高空作业车和非绝缘式高空作业车。按领域分举高平台消防车、油田井架维修车、航空 食品装运车等。四轮驱动自走行式的高空作业车,同样按臂的结构也分为: 折叠壁式、直臂式及混 合壁和桅杆式等。
汽车起重机吊臂的有限元分析
第27卷第3期 辽 宁 工 学 院 学 报 V ol.27,No.32007年 6 月 Journal of Liaoning Institute of Technology Jun.2007收稿日期:2006-11-08基金项目:辽宁省重大科技攻关项目(2006219008-4A ) 作者简介:杨 晶(1982-),女,山东沂水人,硕士生。
李卫民(1965-),男,辽宁朝阳人,教授,博士。
汽车起重机吊臂的有限元分析杨 晶1,李卫民1,刘玉浩2(1.辽宁工业大学 机械工程与自动化学院,辽宁 锦州 121001;2. 空军第三飞行学院, 辽宁 锦州 121000)摘 要:以ANSYS 软件为工具,详细介绍了汽车起重机吊臂的各个臂段在不同工况下的有限元分析过程,包括实体建模、网格划分、载荷和约束的处理;并对汽车起重机吊臂进行了优化设计。
得出的结论为汽车起重机吊臂的设计提供了可靠的依据。
关键词:吊臂;工况;有限元分析;优化设计中图分类号:TP391.72 文献标识码:B 文章编号:1005-1090(2007)03-0195-03Finite Element Analysis of Truck Crane BoomYANG Jing 1,LI Wei-min 1,LIU Yu-hao 2(1.Mechanical Engineering & Automation College, Liaoning University of Technology, Jinzhou 121001, China ;2.The 3rd Flight Institute of Airforce, Jinzhou 121000,China )Key words: boom; work condition; finite element analysis; optimal designAbstract: By means of ANSYS software, finite element analysis of every boom of truck crane under different work condition was described in detail. Its procedure was expatiated, which included solid modeling, meshing, applying loads ;optimal design of the boom was analyzed. Valuable conclusions in application were obtained, with a credible theory foundation for the design of the truck crane boom rendered.吊臂是汽车起重机的重要组成部分。
多功能高空作业平台伸缩臂的有限元分析与优化
() 1 , 5 . 则许用应力 为 : ]331 = 3 . a ' = 3/.= 5 . 5 [ = 5/. 2 53 o ]2 51 167 1 5 MP z 5
式 中:△ } { “ —单元 8 个节点的位移向量 ;Ⅳ] [ —形函数矩阵。
任一点的应变位移的关系为 :6 I { “}e {k= N]△ ‘ "} /
重 物 惯性 阻 转矩 T=  ̄ a 1 3 I :2P  ̄ = 5 N‘ p n
() 1
( 2)
旋转轴的摩擦转矩 T=y+ T= 2 7 I :3 T 2 ̄ 6 . N。 6 n 坡度转矩 T= os a i l3 6 2 I :4P ci s  ̄ = 7 . N。 n n 9 n
21 7
3伸缩臂的有 限元分析
31接触 单元分 析及 其方 程 .
设接触单元的厚度为 e局部坐标系 ( t的原点取在单元 , mn)
f Au 1
2两种工况来研究。 ) 约束第一节立柱的底部各节点在 U 、 、 三 。
个方 向的位移 自由度和 U U 、 R 三个方 向的旋转 自由度 。 R 、R: , U
mut u c i n hg t u e pa f r lf n t ih — i d lt m i o alt o
L i-e gJA GWe,H N i u , A a — a I n fn , N iZ A G L- n G O N n n n Q I j ( c ol f ca ia E g er gJ n s nvr t o in e n eh o g , hni g2 0 , hn ) S ho o h ncl n i ei ,i guU i s y f ce c dT cn l y Z ej n 0 3 C ia Me n n a e i S a o a 1 2
基于ANSYS的高空作业车臂架有限元分析
基于ANSYS的高空作业车臂架有限元分析发表时间:2017-10-23T12:14:26.840Z 来源:《电力设备》2017年第17期作者:张幸幸[导读] 摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
(徐州徐工环境技术有限公司江苏徐州 221135)摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
关键词:高空作业车;臂架;有限元高空作业车主要由底盘、副车架、转台、臂架系统、控制系统、工作平台组成。
其中,臂架是高空作业车最主要的关键部件之一,其安全性、可靠性和先进性是决定高空作业车核心竞争力的关键。
臂架作为将工作平台送至指定工作位置的主要部件,其可靠性对作业安全性的影响至关重要,因此,对臂架结构进行优化及提高可靠性的研究和攻关具有重要意义。
本文以30m高空作业车臂架为研究对象,充分利用有限元多种单元类型的特点,对臂架实现了建模,得到了臂架静态计算的变形与应力,为臂架结构优化及其可靠性的提升奠定了理论与实践数据相统一的基础。
1 臂架所受载荷的确定对于静强度分析,传统观点认为,臂架水平全伸时的工况是最危险工况,但是对于某些部件,从经验可以判断最大应力发生在其他作业工况。
为了更好的了解臂架的整体应力分布情况,对其各个作业工况都进行有限元计算是非常必要的。
作用在臂架上的载荷分为基本载荷和附加载荷,基本载荷是始终或经常作用在高空作业车臂架结构上的载荷,包括自重载荷、工作载荷;附加载荷是高空作业车在正常工作状态下,结构件所受的非经常性作用的载荷,包括风载荷和冲击载荷。
对于不同的载荷,在计算过程中需要乘上不同的载荷系数。
高空作业车举升臂机构设计方案及液压控制

本科毕业设计题目高空作业车举升臂机构设计及液压控制系别工程技术系专业机械设计制造及其自动化学生姓名学号指导教师职称教授2013年04月18日摘要随着国家经济的不断发展,交通运输等基础行业发生着日新月异的变化。
高空作业车作为专用起重运输汽车的一种,它可以将工作人员和工作装备运送到达指定现场并进行作业的专用汽车。
高空作业车主要用于邮电通讯、市政建设、消防救护、建筑装饰、高空摄影以及造船、石油、化工、航空等行业。
它具有机动灵活、转移迅速、覆盖面广、便于接近、到达作业地点后能迅速投入工作等优点。
而且折叠臂式高空作业汽车结构比较简单,改装比较容易,因而发展比较快。
本设计主要内容是选择合适的二类底盘,在此基础上对高空作业车的主要工作装置进行设计。
通过对支腿机构、举升机构和回转机构的设计,进行各个应用元件布置,并采用液压系统对各个元件进行控制以实现举升和回转运动功能。
同时,还对高空作业车的附件进行了简单的设计,并对高空作业车的稳定性进行了计算分析,结果表明基本达到国家对改装车的标准要求。
关键词:高空作业车;支腿机构;举升机构;回转机构;设计AbstractWith the country's economic development, transportation and so on the basis of an ever-changing industry. Folding-arm high above the ground as a dedicated car lifting of a transport vehicle, which can be the work of staff and equipment arrived at the designated on-site delivery and operation of the Special Purpose Vehicle. Folding-arm high above the ground the main vehicle for posts and telecommunications, municipal construction, fire rescue, building decoration, high-altitude photography, as well as shipbuilding, petroleum, chemical, aviation and other industries. It has a flexible, rapid transfer, coverage for close to reach the sites quickly after getting a work of the advantages. And arm-folding high above the ground vehicle structure is relatively simple, relatively easy modification, and therefore faster development.The main content of this design is to choose a suitable chassis in the second category, on this basis of arm-folding work high above the main work of the car plant design. The outrigger body, lifting and turning the body design, layout components for various applications. And the use of the hydraulic system to control the various components in order to achieve lift and rotary motor function. At the same time, also folded-arm high above the ground Annex cars were simple design, and folded-arm high above the ground vehicle for the stability of the calculation and analysis, results showed that the modification of the basic national standards of vehicles.Key words:Folded-arm high above the ground vehicles。
高空作业车吊臂结构分析

高空作业车吊臂结构分析摘要:城市化建设的飞速发展,城市的高层建筑群越来越多,对适合于此类建筑物施工的高空作业车设备需求量与日俱增。
作业臂是高空作业平台的重要承载部件之一,也是整机结构强度相对薄弱的部分,其力学性能对机械的正常运转有直接影响,为了保证工作人员高空作业时的人身安全,其作业臂有着严格的设计要求。
关键词:建筑施工高空作业车作业臂设计1.绪论高空作业车要适应高层建筑的恶劣环境,因为工人们的安全必须被保证,工人们必须带着安全感工作。
结构件的设计和强度必须进行校验以提高最好的工作条件。
借助于一种经验设计方法,我们必须通过理论的方法研究出一种解决问题的工具。
1.1课题的研究背景与意义工程机械广泛应用于经济建设的各部门,在整个经济发展中占有十分重要的地位。
近年来,工程机械发展迅速,特别是随着高科技的广泛应用,带动了整个工业的迅猛发展,设计上的优化、仿真,使大型工程机械有了更广阔的发展空间。
高空作业车是一种用来运送工作人员和工作器材到达指定高度进行作业的工程机械。
由于它具有机动灵活、操作简单、安全可靠等特点,因此被广泛地用于大型场馆、桥梁、港口海岸的检护等方面,有着广阔的发展前景。
尽管我国在高空作业车设计制造上取得了一些成绩,但是国内生产制造的高空作业机械同国外同类型高空作业机械相比有一定的差距,主要表现为技术含量低、结构笨重、作业时稳定性能差等。
通过本课题的研究掌握高空作业车作业臂的结构设计理论和方法,从而实现较大的作业高度与幅度,提高使用的可靠性,为研制高空作业车工作臂奠定基础,这具有现实的重要意义。
1.2课题国内外的发展状况高空作业车在世界上已有几十年的发展历史,现已成为一个完整的专用产品研发、生产体系。
如德国的TIRRE,意大利的RICO、芬兰的BRONTO,英国的COLES等,且它们各有侧重,COLES侧重于车在高空作业平台,BRONTO 侧重于高空消防车系列。
高空作业车发展到现在,其作业高度已达到72m,作业车的可靠性、安全性、舒适性、操作方便和简单的直接性等方面都有较大的提高。
机械毕业设计716高空作业车的转台结构设计及有限元分析设计
高空作业车转台的结构设计及分析摘要本课题针对GKZ系列车型转台部分的要求工作装置,对GKZ型高空作业车回转机构进行设计及分析。
高空作业车由液压马达、回转减速器及回转小齿轮、回转支承等组成。
进行回转时,液压马达输出动力,通过回转减速器减速后带动输出轴上的小齿轮旋转,小齿轮与回转支承的齿圈啮合,由于回转支承的齿圈与车架刚性连接,因而回转减速器带动与之相连的转台回转。
本课题确定了高空作业车回转机构的传动方案,采用的单排四点接触球式回转支承,此类支承的主要优点是同时承受轴向、径向力和复合力矩。
适用子中小型起重机。
转台的结构设计采用的是倒π型结构,前后两个高强板,左右各一个支承板,再加两个加强筋形成。
对转台采用PRO/E进行建模,将建好的模型通过转化放入ANSYS中进行有限元分析,分析出变形最大和受应力最大的接触面,对分析的结果的提出改进方案,对改进后的方案进行有限元分析比较, 确定最佳方案。
本方案的设计为同类转台的结构设计提供了理论依据和分析方法。
在课题设计的过程中使用的方法有:(1)在结构设计过程中主要对转台的的受力情况进行分析,计算出转台的受力大小和转台的自重,对传动齿轮的设计及强度校核,运用绘图软件PRO/E进行建模。
(2)将模型导入ANSYS中,对转台的受力情况进行分析查看其分析的结果,确保转台的变形和所受的应力均能符合设计要求。
[关键词]:高空作业车;转台结构设计;有限元分析;ANSYSConstructional design and analysis for turn-table of aerial work platformsAbstractAccording to the requirement of working devices of turn-tables in the machine series type GKZ, this paper presented the constructional design and analysis for slewing mechanism of aerial work platforms. The aerial work platforms comprised hydraulic motors, rotary speed reducers, revolving pinions, slewing bearings and so on. When the turn-table slewed, the hydraulic motor transmitted power output which enabled pinions on the output shaft to revolve. Pinions were meshed with ring gear on slewing bearings. Due to rigid connection between the ring gear on slewing bearings and the chassis, turn-tables were rotated by rotary speed reducers. Gear plan for slewing mechanism of aerial work platforms and constructional design for turn-table were presented.Gear plans transmission for slewing mechanism of aerial work platforms was provided in which single-row four-point contact ball slewing bearings were adopted. The advantage of this type of bearing, which suited small and medium crane, was that it can bear axial force, radial force and compound moment at the same time. Configurations of anti type π were adopted in constructional design for turn-table, in which there were two high strength plates in tandem, two eudipleural supporting plates and two stiffened panels. Modeling and simulation of turn tables were obtained using PRO/E. The obtained modeling was transformation and analyzed by ANSYS Finite Element Analysis software. Consequently, contact area in the maximum of deformation and stress were analyzed. According to the results, improved schemes were presented, which were further analyzed and compared by finite element analysis. Finally, the best scheme was founded. This project provided the approaches of constructional design for the similar type of turn-table in theory.The following methods were used in this project: 1) Force situation of turn tables were analyzed in constructional design, and force variation and mass of turn-tables were calculated. The design and intensity of transmission gear were checked. Modeling and simulation were obtained using drawing software PRO/E; 2) The modeling were imputed into ANSYS and bearing force of turn-tables were analyzed. The results ensured that the deformation of turn-tables and their bearing force would meet the design requirements.[Keywords]: Aerial work platform; Turn-tables; Constructional design; Finite element analysis;ANSYS目录第一章绪论 (1)§1.1 引言 (1)§1.2 高空作业车的国内外发展概况 (1)1.2.1高空作业车的国外发展趋势与动向 (2)1.2.2高空作业车国内现状、差距与如何提高的方法 (3)§ 1.3 高空作业车的组成 (5)1.3.1工作机构 (5)1.3.2金属结构 (6)1.3.3动力装置 (6)1.3.4控制系统 (7)§ 1.4 本课题研究的意义 (7)第二章高空作业车的转台的结构分析 (8)§2.1 高空作业车的转台总体结构设计 (8)2.1.1转台的组成 (8)§2-2 转台的受力分析 (13)2.2.1转台的自重G (14)§2-3 上下臂的受力分析及计算 (16)2.3.1上臂的受力分析 (17)2.3.2下臂的受力分析 (19)§2-4 回转支承装置的计算 (21)2.4.1回转支承装置的计算载荷 (21)2.4.2转盘式回转支承装置的计算 (22)2.4.3按承载能力曲线选取合适的回转支承型号 (22)2.4.4转盘式回转支承装置的计算 (24)2.4.5按承载能力曲线选取合适的回转支承型号 (24)§2.5 传动齿轮的计算 (25)第三章转台的有限元分析 (28)§3.1 有限元方法的基础知识 (28)§3.2 有限元分析软件ANSYS (30)§3.3 转台结构的有限元分析 (34)3.3.1 实体建模 (34)3.3.2计算模型 (34)3.3.3有限元模型 (36)第4章结论 (43)致谢 (44)参考文献 (45)第一章绪论§1.1 引言工程机械广泛应用于经济建设的各部门,并且在整个经济发展中占有十分重要的地位。
高空作业平台伸缩臂有限元分析及优化
高空作业平台伸缩臂有限元分析及优化李大涛;刘晓婷【摘要】对国内某型蜘蛛式高空作业平台样机的伸缩臂进行建模、有限元分析和截面优化.在伸缩臂强度、变形均在许用范围内的条件下,得到较合理的截面形状和尺寸,使整个伸缩臂的重量最轻,达到优化的目的,为高空作业平台的设计、制造提供了依据.%The paper describes modeling, finite element analysis and section optimization of telescopic boom of a domestic spider-type aerial working platform prototype. Within the allowable strength and deformation of telescopic boom,reasonable section shape and dimension can be obtained to make the boom have minimum weight after optimization. It prorides basis for design and manufacturing of aerial working platform.【期刊名称】《起重运输机械》【年(卷),期】2011(000)005【总页数】4页(P67-70)【关键词】高空作业平台;伸缩臂;有限元分析;参数化建模;优化【作者】李大涛;刘晓婷【作者单位】长安大学工程机械学院,西安,710061;长安大学工程机械学院,西安,710061【正文语种】中文【中图分类】TH211+.6国内某型蜘蛛式高空作业平台伸缩液压缸布置在箱形伸缩臂内,伸缩臂共 4节 (基本臂、第 2节臂、第 3节臂、第 4节臂),采用高强度钢板焊接而成。
由液压缸实现变幅,采用 1个双作用液压缸和链条机构实现 4节臂的同步伸缩。
汽车起重机转台有限元分析及优化
汽车起重机转台的有限元分析及优化摘要:汽车起重机的转台是用来安装吊臂、起升机构、变幅机构、回转机构、上车发动机、司机室、液压阀组及管路等的机架。
转台通过回转支承安装在起重机的车架上,为了保证起重机的正常工作,转台应具有足够的刚度和强度。
对于汽车起重机,为了有较好的通过性和较低的成本,应尽量减小转台的外形尺寸及重量。
随着计算机辅助工程(CAE)技术在工业应用领域中的广度和深度的不断发展,它在提高产品设计质量、缩短设计周期、节约成本方面发挥了越来越重要的作用。
目前CAE分析的对象已由单一的零部件分析拓展到系统级的装配体,如挖掘机、汽车起重机等整机的仿真,而且,CAE分析不再仅仅是专职分析人员的工作,设计人员参与CAE分析已经成为必然。
关键词:汽车起重机;转台;有限元分析1.引言1.汽车起重机转台作为起重机三大结构件之一,负责起重机上车和底盘之间力的传递。
在现今高强板大量使用的情况下,如何简化结构、减少重量是起重机设计的难题之一。
经典ANSYS有限元分析界面是用板壳单元在ANSYS里面建模并进行计算,但是存在建模过于复杂,难以修改,模型无法导出的问题,属于验证性计算,而使用ANSYS Workbench Enviroment(AWE)则可以用PRO/E 软件建立模型,再导入AWE进行计算,且在PRO/E中修改模型后再次导入可以保留之前设置的边界条件,设计效率成倍提高。
ANSYS Workbench Enviroment(AWE)作为新一代多物理场协同CAE仿真环境,其独特的产品构架和众多支承性产品模块为整机、多场耦合分析提供了非常优秀的系统级解决方案。
具体来讲,AWE具有的主要特色如下:1.强大的装配体自动分析功能针对航空、汽车、电子产品结构复杂,零部件众多的技术特点,AWE可以识别相临的零件并自动设置接触关系,从而节省模型建立的时间。
而现行的许多软件均需手动设置接触关系,这不但浪费时间还容易出错。
除此之外,AWE还提供了许多工具,以方便手动编辑接触表面或为现有的接触指定接触类型。
高空作业车工作臂结构设计及有限元分析
目录第一章绪论 (4)1.1高空作业车的概况及其发展方向 (4)1.2高空作业车组成 (5)1.2.1 工作机构 (5)1.2.2 金属结构 (5)1.2.3 动力装置 (6)1.2.4 控制系统 (6)1.3 GKZ型高空作业车的概况 (6)1.3.1整机结构简介 (6)1.3.2高空作业臂 (7)1.3.3 作业车作业状态主要技术参数 (8)1.4 课题的提出 (8)1.5 本课题所要研究的具体任务 (9)1.6 本课题研究的意义 (9)第二章高空作业车的结构设计 (10)2.1 材料的选择 (10)2.2 计算上、下臂的长度 (11)2.3 确定油缸铰点的位置 (12)2.3.1 确定上臂油缸铰点的位置 (12)2.3.2 确定下臂油缸铰点的位置 (13)2.4 上臂截面尺寸的确定 (13)2.4.1 对上臂进行受力分析 (13)2.4.2 计算上臂截面尺寸 (14)2.4.3 对上臂进行强度效核 (16)2.5 下臂截面尺寸的确定 (18)2.5.1 对下臂进行受力分析 (18)2.5.2 计算下臂的截面尺寸 (21)2.5.3 对下臂进行正应力效核 (22)第三章高空作业臂有限元分析 (25)3.1 概述 (25)3.2 载荷条件及分析工况说明 (26)3.2.1 载荷条件 (26)3.2.2 分析工况 (26)3.3 上臂的有限元分析 (27)3.3.1上臂的实体建模 (27)3.3.2 有限元分析 (28)3.4 下臂的有限元分析 (32)3.4.1下臂的实体建模 (32)3.4.2 有限元分析 (32)第四章总结 (37)致谢 (38)参考文献 (39)高空作业车工作臂结构设计及有限元分析[摘要]:高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆。
本文主要以“GKZ型高空作业车”上、下臂结构为研究对象,对上、下臂进行结构设计和ANSYS有限元分析。
本文主要阐述了根据高空作业车的最大作业高度12米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据使用要求选择作业臂材料的类型;其次根据最大作业高度确定上、下臂的长度;再经过受力分析利用强度来确定臂的截面尺寸及油缸的铰接位置;再进行强度、刚度、稳定性的校核,查看作业臂的尺寸是否符合要求;利用PRO/E软件进行上、下臂实体建模,通过PRO/E软件的输出端口和ANSYS软件的输入端口,将实体模型导入ANSYS软件中。
高空作业车臂架结构优化设计研究
高空作业车臂架结构优化设计研究伸缩臂是汽车工作装置的主要组成部分,它直接影响到汽车的作业性能。
以臂架重量的最小化作为调整的最优目标,以强度和刚度等相关条件作为约束条件,创建出调整后的数学模型,从而得出最理想的截面类型。
研究调查显示,经调整后的臂架最大应力、以及质量等参数均有所降低,在增强臂架综合性能指标的水平之上,完成了减轻自重的初步目标,期望能对作业车的臂架内部结构的设计工作带来些许参考价值。
标签:高空作业;结构优化;臂架臂架的综合性能将极大地影响到汽车的作业效率。
伸缩臂的质量在整个作业车的质量中占有很大的比例。
若目前吊臂存在重量过大的现象,则会进一步地影响工作效率的问题。
所以,在保证工作强度以及工作刚度的基础之下,要不断地对臂架结构进行调整与优化,用以提高臂架的自身性能。
并创建臂架的具体化数学模型,通过部分软件实现对臂架截面的尺寸等参数进行调整与优化。
一、高空作业车臂架结构截面形式对高空作业车臂架结构的截面形式的优化与调整是截面优化的关键步骤,其可以在增强高空作业车臂架结构的综合能力的基础之上,进一步地减小其臂架自身的质量,最大程度上地节省所用原材料,降低作业成本。
高空作业车臂架结构的基本参数如图1所示,由图可得,高空作业车的臂架横截面的主要形式为矩形,其中,m、n分别为上、下盖板的厚度大小,L为作业车臂架的上下盖板宽度的大小,t为盖板的厚度大小,H则为盖板的高度大小,此五类信息为高空作业车臂架结构的主要参数。
二、高空作业车臂架结构的有限元类分析优化前,必须对臂架进行有限元分析。
在DM模块中创建了臂架结构的具体化数学模型[1]。
起重机的最大的工作载荷施加在臂座的上端面之中。
其方向是Y轴的负方向。
在臂架侧面施加120帕的风荷载,在臂架上施加等效重量的筒体、管道等部件。
u,ur的平移自由度。
U2和旋转的两个方向。
转子被约束在气缸和基本臂的铰链连接处,并释放其绕Z轴的转动方向的自由度。
并且在其他关节处增添相同的约束条件,通过静力分析得到相对应的应力云图以及应变云图。
gkz14高空作业车工作臂设计及有限元分析设计说明书_毕业论文

1 绪论1.1 概述我国高空作业机械的生产于20世纪70年代末开始起步,起步较晚但发展较快,目前生产经营企业已由原来的几家迅速增加到40余家,其中与国外合资或合作生产的企业有5家,根据2004年和2005年《中国工程机械年鉴》,2003年高空作业机械工业总产值为32139万元,生产各类高空作业平台1906台,高空作业车740台;2004年高空作业机械工业总产值为36340万元,生产各类高空作业平台2500台,高空作业车800台。
据不完全统计,到2008年,全国高空作业车年总产销量均超过1600台,可见发展速度之快,行业几个骨干企业通过近几年强化技术创新和科研开发,其生产规模不断扩大,形成了各自特色的产品系列,基本能满足国内市场高空作业机械的需要,企业的各项主要经济指标逐步上升,经济效益也逐年提高,行业也呈现出快速发展的态势。
1.1.1 高空作业机械行业的发展现状(1) 产品性能逐步提高我国高空作业机械行业的一些骨干企业利用自己的技术和设备优势,并通过引进、消化和再创新,开发了许多新产品,其产品的技术水平和产品质量都不断提高,达到和接近了国际同类产品的先进水平,推动了高空作业机械行业的技术进步,在国内市场中竞争力强,市场销路好,产量增加较快。
如杭州爱知工程车辆有限公司开发的全液压驱动型最大作业高度可达26.7m 的自行式高空作业平台,徐州海伦哲开发的全遥控16m自行走高空作业车、20m联动折叠加伸缩智能控制和35m多级伸缩折叠混合臂架智能控制高空作业车等,以上产品填补了国内产品空白,达到了国际先进水平,北京起重机厂开发了自行式剪叉平台、蜘蛛式折臂平台、箱型截面铝合金桅柱平台,其中箱型截面铝合金桅柱平台单桅柱最大作业高度达到了16.5m,杭州赛奇工程机械厂多桅柱铝合金平台达到了22m,。
此外,在高空作业车产品方面,徐州海伦哲、抚顺起重机、锦州重型、重庆大江等公司先后开发了30m以上的高空消防车,彻底打破了国内只能依赖进口产品的薄弱局面。
高空作业车车臂轻量化设计及参数优化

高空作业车车臂轻量化设计及参数优化*曹国智中铁第四勘察设计院集团有限公司 武汉 430063摘 要:文中针对高空作业车因车臂截面设计不合理而导致整车质量过大,进而导致无法在城市中正常作业,对某款作业高度为23 m的高空作业车车臂进行轻量化设计。
分析了作业臂的强度条件和刚度条件,建立了车臂起升的有限元模型,并通过实车试验验证了有限元模型的可靠性。
基于可靠的有限元模型,将四节车臂的截面高宽和厚度作为设计变量,以作业臂的重量和变形为目标,利用NSGA-Ⅱ遗传算法进行多目标优化。
研究结果表明:作业臂角度为50°时为作业臂的最危险工况,危险点为基本臂与液压缸的铰点位置;优化后,该款高空作业车车臂的质量降低了105 kg,减重比例18.5%,研究结果为高空作业车车臂的轻量化提供了一种设计方法。
关键词:作业臂;轻量化;数值模拟;NSGA-Ⅱ遗传算法中图分类号:TH211.6 文献标识码:A 文章编号:1001-0785(2024)04-0046-06Abstract: Considering that the unreasonable cross-section design of the boom of aerial working platform leads to the excessive weight of the whole vehicle, which leads to the failure of normal operation in the city, a lightweight design of the boom of an aerial working platform with an operating height of 23 m was carried out. The strength and stiffness conditions of the working boom were analyzed, and a finite element model of the lifting of the vehicle boom was established, and the reliability of the finite element model was verified by the real vehicle test. Based on this model, taking the cross-section height, width and thickness of the four-section boom as variables, and the weight and deformation of the working boom as the objective, the multi-objective optimization was carried out by NSGA-Ⅱ genetic algorithm. The results show that when the angle of the working boom reaches 50 degrees, the working boom is in the most dangerous working condition, and the dangerous point is the hinge position between the basic boom and the hydraulic cylinder. After optimization, the weight of the boom of this aerial working platform is reduced by 105 kg and 18.5%, which provides a design method for the lightweight of the boom of aerial working platform.Keywords:working boom; lightweight; numerical simulation; NSGA-Ⅱ genetic algorithm0 引言随着节能减排和双碳战略的不断推进,国家对汽车质量方面有了更加严格的要求。
高空作业车的转台结构设计

徐州师范大学本科生毕业论文(设计)论文题目:高空作业车的转台结构设计及有限元分析姓名:院系:专业、年级、班组:指导教师:徐州师范大学教务处印制200** 年 6 月 4 日徐州师范大学机电工程学院毕业设计(论文)任务书院(系)专业班学生一、设计题目:高空作业车的转台结构设计及有限元分析二、设计任务要求及主要原始资料:设计任务:回转机构的传动方案的确定,转台装配图一张及主要零件的零件图,转台有限元分析及根据分析结果的改进方案,改进后的有限元分析结果与原方案分析结果的比较。
原始资料:平台的额定载荷200kg回转速度0-2 r/min三、设计时间:20** 年 4 月13 日至20** 年6 月 3 日指导教师:(签名)教学院长:(签名)徐州师范大学机电工程学院毕业设计(论文)立题卡(理工类)院(系)专业班级说明:(1)空格内打"√"或填上数字等负责指导教师日期(2)本卡一式3份,指导教师、院(系)和教务科各一份教研室主任日期教学院长日期徐州师范大学毕业设计(论文)开题报告及工作实施计划院系专业年级、班级姓名指导教师开题报告日期徐州师范大学教务处印制一、毕业设计(论文)开题报告二、毕业设计(论文)工作实施计划(一)毕业设计(论文)的理论分析与软硬件要求及其应达到的水平与结果(二)毕业设计(论文)工作进度与安排三、对开题报告的审阅意见高空作业车转台的结构设计及分析(Constructional design and analysis for turn-table of aerial work platforms)摘要本课题针对GKZ系列车型转台部分的要求工作装置,对GKZ型高空作业车回转机构进行设计及分析。
高空作业车由液压马达、回转减速器及回转小齿轮、回转支承等组成。
进行回转时,液压马达输出动力,通过回转减速器减速后带动输出轴上的小齿轮旋转,小齿轮与回转支承的齿圈啮合,由于回转支承的齿圈与车架刚性连接,因而回转减速器带动与之相连的转台回转。
高空作业车载人作业平台臂架系统优化设计研究
高空作业车载人作业平台臂架系统优化设计研究摘要:当前,高空作业广泛执行,此种作业模式主要是利用高空作业车支撑高空维修等工作平稳运行,其中臂架需要在几十米高空运送物品,保证高空作业稳定安全开展非常重要。
本文主要围绕着臂架系统来展开,基于高空作业模式,对车臂架变幅下降阶段的稳定性展开深入研究,保证高空作业更加安全,为工作人员提供一个可靠的操作环境。
关键词:仿真模型;臂架参数;本体性能引言:臂架的整体性能至关重要,将会影响到高空作业的效率,在作业车中,伸缩臂的质量占据着较大的比例,如果吊臂的重量太大,则会极大地制约工作进度,因此,确保工作强度、刚度趋于合理化设计水平,应加强对臂架系统的改进,提升臂架系统的整体性能,保证高空任务可以顺利完成,优化底盘设施,促进整体设备重心得到稳定效果。
1.分析当前高空作业车臂架变幅体系状态应用变幅机构,可以实现对臂架的上升、下降有效处理,带动臂架整体工作幅度趋于合理化。
变幅机构得到广泛应用,其中在高空作业车方面起到了至关重要的作用,还可以用于混凝土的输送泵车中,它是主要的工作机构,此机构有助于提升整体设备的稳定性。
当前应用比较高频的变幅机构中,其中一种为臂架形式,主要依据变幅性选择对应的变幅方式,从而最大化的发挥机构的性能[1]。
2.基于臂架变幅机构分析其仿真模型2.1有关于臂架结构的概述在臂架体系中,其伸缩机构涉及到诸多方面,不仅包含着基本臂,还包括二节、三节臂形式等。
当油进入到伸缩缸中,就会带动二节臂呈现伸出状态,导致基本臂与钢丝绳的距离越来越远,而对于三节臂与钢丝绳来讲,二者的距离变短了。
与臂架密切相关的变幅机构,其结构组成复杂,具备连杆、转台等部分,同时还拥有三脚架、臂架等部分。
变幅机构的使用,不仅可以促进作业车得到目标高度值,还有助于维护油缸,减少其承受的压力。
针对于臂架有关的变幅机构,在现实作业期间,可以将较大范围的应用材料等输送到目的地。
另外,作业车投入使用时,可以利用变幅机构的铰接,在高空位置实现360度的旋转功能。
高空作业车的典型结构设计

高空作业车的典型结构设计高空作业车典型结构设计1、支腿机构设计高空作业车有各咱不同类型的支腿,起调平和保证整车工作稳定的作用,要求坚固可靠,操作方便。
1.1、支腿跨距的确定高空作业车的支腿一般为前后设置,并向两侧伸出,如图1所示。
支腿支承点纵横方向的位置选择要适当,其原则是作业平台在标定载荷和最大作业幅度时,整车稳定性要达到规定要求。
图1 高空作业车的支腿跨距后方III侧方(右)II侧方(左)IVa、支腿横向跨距支腿横向外伸跨距的最小值应保证高空作业车在侧向作业时的稳定性,即全部载荷的重力合力落在侧倾覆边以内,并使绕左右倾覆边AB或DC和稳定力矩大于倾覆力矩。
如图2所示,1/2支腿横向跨距a应满足:图2 支腿跨距的确定(一)图3 支腿跨距的确定(二)()()q Q G G G L G R q Q r G a b b ++++-++≥2111 ()1式中:g m G 11=,1m ——转台质量,kg ; g m G 22=,2m ——底盘质量,kg ; g m G b b =,b m ——臂架质量,kg ; g m q q =,q m ——作业平台质量,kg ; Q ——作业平台的标定载荷,N ;1L ——转台重力中心至回转中心的距离,m ; r ——臂架重力中心至回转中心的距离,m ; R ——作业半径(臂幅),m 。
b 、支腿纵向跨距支腿纵跨距的确定和横向跨距确定的原则一样,应使绕前、后倾覆边BC 或AD 的稳定力矩大于倾覆力矩。
当作业平台在车辆后方作业时,如图3所示,可得后支腿支承点至回转中心的距离1b ,应满足:()q Q G G G L G a b b ++++-=21221 ()2式中:2L ——底盘质心至回转中心的距离,m 。
同理,可得前支腿支承点至回转中心的距离2b 为:()q Q G G G L G a b b +++-=21222 ()3由式2、式3可知,1b 和2b 不等。
这是因为底盘重心在回转中心之前所致,且a b b 221=+。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章绪论 (4)1.1高空作业车的概况及其发展方向 (4)1.2高空作业车组成 (5)1.2.1 工作机构 (5)1.2.2 金属结构 (5)1.2.3 动力装置 (6)1.2.4 控制系统 (6)1.3 GKZ型高空作业车的概况 (6)1.3.1整机结构简介 (6)1.3.2高空作业臂 (7)1.3.3 作业车作业状态主要技术参数 (8)1.4 课题的提出 (8)1.5 本课题所要研究的具体任务 (9)1.6 本课题研究的意义 (9)第二章高空作业车的结构设计 (10)2.1 材料的选择 (10)2.2 计算上、下臂的长度 (11)2.3 确定油缸铰点的位置 (12)2.3.1 确定上臂油缸铰点的位置 (12)2.3.2 确定下臂油缸铰点的位置 (13)2.4 上臂截面尺寸的确定 (13)2.4.1 对上臂进行受力分析 (13)2.4.2 计算上臂截面尺寸 (14)2.4.3 对上臂进行强度效核 (16)2.5 下臂截面尺寸的确定 (18)2.5.1 对下臂进行受力分析 (18)2.5.2 计算下臂的截面尺寸 (21)2.5.3 对下臂进行正应力效核 (22)第三章高空作业臂有限元分析 (25)3.1 概述 (25)3.2 载荷条件及分析工况说明 (26)3.2.1 载荷条件 (26)3.2.2 分析工况 (26)3.3 上臂的有限元分析 (27)3.3.1上臂的实体建模 (27)3.3.2 有限元分析 (28)3.4 下臂的有限元分析 (32)3.4.1下臂的实体建模 (32)3.4.2 有限元分析 (32)第四章总结 (37)致谢 (38)参考文献 (39)高空作业车工作臂结构设计及有限元分析[摘要]:高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆。
本文主要以“GKZ型高空作业车”上、下臂结构为研究对象,对上、下臂进行结构设计和ANSYS有限元分析。
本文主要阐述了根据高空作业车的最大作业高度12米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据使用要求选择作业臂材料的类型;其次根据最大作业高度确定上、下臂的长度;再经过受力分析利用强度来确定臂的截面尺寸及油缸的铰接位置;再进行强度、刚度、稳定性的校核,查看作业臂的尺寸是否符合要求;利用PRO/E软件进行上、下臂实体建模,通过PRO/E软件的输出端口和ANSYS软件的输入端口,将实体模型导入ANSYS软件中。
在ANSYS软件中,先定义工作臂的单元类型为实体单元“Solid Brick 8 node 45”;其材料属性定义为:弹性模量为2.1e11,泊松比为0.3,钢的密度为37850kg/m。
进行网格划分时,采用了ANSYS提供的最常用的网格划分控制工具“MeshTool”中的“SmartSize Controls”,网格划分的值越小得到的结果越好,但网格太细会占用大量的分析时间,造成资源浪费,由于上、下臂的尺寸较大,而厚度较小,为提高计算效率,在网格划分密度时,选取值为4。
然后,施加均布载荷和约束,进行结构的强度和刚度分析,确定危险截面或危险点的应力分布及变形。
根据有限元分析结果,找出结构设计中的不合理因素,提出改进方案,并对改进后的结构进行有限元分析,对两种分析结果进行比较。
最后画出作业臂总装图及上、下臂零件图。
[关键词]:高空作业车;结构设计;有限元分析;ANSYSAerial vehicle arm of Aerial work platform structuredesignand finite element analysis[Abstract]:Aerial vehicle arm of Aerial work platform is a special vehicle which carries operators and tools to the aerial appoint place for work,In this paper, “GKZ high-altitude vehicles in the” upper and lower arm structure of the research object, right, under arms, structural design and Finite Element Analysis. This paper elaborated on the basis of aerial vehicle operations largest 16 meters high, to meet the high operating on the premise that for high-altitude operations arm of structural design : First choice under the requirements of the use of operating arm of the types of materials; Second, based on the height of the largest operations to determine the upper and lower arm length; After Analysis to determine the intensity of use of the arm section size and fuel tanks articulated position; further strength, stiffness, Stability of Verification, check the operating arm size whether it meets the requirements; PROE software using the upper and lower arm entity modeling, PROE software through the output ports and ANSYS input ports, Entity Model into ANSYS software. In ANSYS, first definition of the modules work arm type of entity unit "Solid Brick 8 node 45"; material properties : the definition of elastic modulus of 2.1 e11, the Poisson's ratio of 0.3, the density of steel. For mesh, ANSYS used for the most commonly used mesh control tool "MeshTool" of the "Smar tSize Controls, "mesh smaller the value the better the results. But mesh too small will occupy a great deal of analysis time, resulting in a waste of resources, since the upper and lower arm of a larger size. thickness and smaller, to increase the efficiency of the computation, the mesh density, the selected value of four. Then, impose uniform loads and constraints, structural strength and rigidity, identify hazardous or dangerous section the stress distribution and deformation. According to the finite element analysis, structural design to identify the irrational factors that improvement program also improved the structure of finite element analysis, the analysis of both results. Finally paint operations arm assembly diagram and the upper and lower parts arm map. [Keywords]:Aerial vehicle arm of Aerial work platform;Structural design;Finite element analysis;ANSYS第一章绪论1.1高空作业车的概况及其发展方向高空作业车又称登高平台消防车,广泛用于建筑、市政、电讯、机场、工厂、园林、住宅等场所,从事消防、抢险救灾、施工、安装、维护等工作。
其中,供消防部门用于灭火、辅助灭火或消防救援,是最主要的一个功能。
高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的。
高空作业装置包括高空作业臂、起重工作臂、起升机构、动力系统、液压系统、电气系统还有操纵装置等部分组成。
现在的高空作业装置具有操作平顺、工作稳定、自动调速、安全可靠等优点,大大提高了空中作业的工作效率。
高空作业车按工作臂的型式,有四种基本型式,分别为:垂直升降式、折叠臂式、伸缩臂式和混合臂式。
垂直升降式高空作业车的升降机构只能在垂直方向上进行运动。
它的主要特点是结构简单,承载能力强,但作业范围小,作业高度低,这种结构型式应用比较少。
折叠臂式高空作业车工作臂之间的连接全部采用铰接型式,所以国外又把它叫做铰接式高空作业车。
折叠臂高空作业车结构适合于较低作业高度的车型,如要加大作业高度,必然要增加臂长或增加工作臂数量,增加臂长会使作业车体积庞大,降低灵活性;增加工作臂数量会造成操作繁琐,安全性降低。
伸缩臂式的高空作业车在行驶状态时,工作臂缩回套叠,工作时伸出,可以有效增大作业高度,同时具有工作效率高、操作简单、动作平稳等特点。
混合臂式高空作业车工作臂之间既有铰接,也有伸缩,是折叠臂式和伸缩臂式高空作业车的结合,它综合了两种结构型式的优点,工作性能最好,但结构也最为复杂。