300MW汽轮机电液控制系统技术改造
300MW机组汽轮机通流改造采用的技术措施

300MW机组汽轮机通流改造采用的技术措施摘要节约能源足我国的一项基本国策,对现役国产汽轮机组通流部分进行技术改造是发电厂节能降耗的有效手段。
通过对汽轮机通流部分的损失进行分析,论述300MW机组汽轮机通流改造采用的技术措施,对于大型机组改造具有一定借鉴作用。
关键词300MW机组;汽轮机;通流改造;关键技术随着国民经济的稳步发展,对电力的需求迅速提高。
电力作为商品,也正在走向市场,全国各电网负荷峰谷差拉大变得日益突出。
如何进一步提高国产老机组的调峰能力和低负荷运行的经济性;如何进一步降低国产老机组的发电成本,提高市场竞争能力;如何进行国产老机组的技术改造,提高机组运行可靠性已经成为了国内电力企业研究的重点课题之一。
国产大型火力发电机组的现代化改造项目是一种多快好省的技改工程,该项目极具推广应用价值,应用前景十分美好,对节能降耗、保护生态环境、增加社会效益将有重大意义。
本文主要分析了300MW机组汽轮机通流改造采用的相关技术措施。
1 高压缸技术改造前汽轮机组是一台单轴冲动式四缸四排汽机组,由一只单流高压缸、一只单流中压缸和二只双流低压缸组成。
机组的给水回热系统由三级高压加热器、一级除氧器和四级低压加热器组成。
Parsons公司提出的改造方案为更换单流高压缸以及二只双流低压缸的通流部分,包括转子、动叶片和隔板,改造前轴承座和中轴承座台板滑动面结构。
改后的高压缸部件包括一级冲动式调节级和13级反动度为50%的反动级。
调节级仍设计为冲动式。
这是考虑到当汽轮机选用顺序阀调节控制方式运行时,调节级经常处于部分进汽状态下工作,动叶片不可能保持较大的反动度,否则,蒸汽会通过进汽的叶片通道流到级后。
调节级在不同负荷下的焓降变化较其它级要大,为不使焓降变化对级效率产生较大的影响,因此采用较小的速比以及直径较大的调节级。
本级动叶片的节径改造前后分别为1104.5mm和1040mm,叶高分别为46mm和38.66mm。
汽轮机数字电液控制系统技术应用研究
之一 。随着汽轮机厂容量不断扩大, 对运行参数要求不断提高, 控 制设备不断升级换代, 采用先进 的热工 自动化技术是提 高机组安
全、 经 济运 行 最有 效 的措 施 之 一 。 文章 就对 汽轮 机 数 字 电 液控 制 系统 技 术应 用 情 况进 行 了分 析和 探 讨 。
关键 词 : 汽轮 机 ; 控制 ; 技 术
上, 考 虑了 电网控制 , 热 网控制 和机 炉协调 控制 的需 要 而发展 起来 的 , 数字电液控制系统 D E H是现代汽轮机控制系统的典型形式。而 D E H 数字电液控制系统能够精确地控制汽轮机的转速或功率。较强的对汽 轮机主机及辅机系统扩展监控的能力 , 主控制器采用高性能 C P U, 可以 满足汽轮 机 自启动 ( A T C ) 的运算要 求 , 危急遮断 系统 主要用 来在危 急状 态下迅速关闭主调门, 实现停机, 以保护汽轮机的安全。另外 , 还可以降 低热耗 , 提高机组的经济 l 生。其阀门管理功能即单阀顺 序阀切换功能, 使 机组在 稳定运行 时 可选 择采用 喷嘴调节 方式 ,尽 量减少 了节流状 态 下 的阀门损失 。 2 . 2 2 0 0 M W 汽轮机 D E H数字电液调节系统应用。 近年来随着计算 机技术的发展及用户对 自动化要求的不断提高,中小汽轮机也陆续开 始应用 数字 电液控制 系统 。2 0 0 M W 汽轮机 电液调节 系统具有 及 时 、 快 速、 准确、 灵敏度高的特 , 其迟缓率不大于 0 . 0 6 7 %。 在蒸汽参数稳定的 情况下, 可以保证功率偏差小于 1 MW。当蒸汽参数处在不断变4 g ,  ̄ - 中, 获得相对稳定或变化很小的蒸汽参数才是我们的目的。因此, 必须掌握 蒸汽参数的变化规律。其特点是压力损失小, 量程范围大 , 精度高, 减少 机组全周进汽, 缩短启动时间, 无可动机械零件。不断提高可靠性指标, 从 而使产 品显 著提高 。 从 而使机组运行减 少不必要 的节流损失 , 提高机 组的热经济性 。 2 _ 3 3 E H与 C C S 控制信号的联络。随着工业 自动化程度的不断提 高, 发电厂单机容量的增大, 机组 自 动化水平不断提高。分散控制系统 ( D C S ) 在 国内外 大型发 电厂 的应用 日 趋广 泛。 信号 的联络 其实质是 计算 机技术对 生产过程 进行集 中监视 、 操作、 管理 和分散控制 的一捉 新型 控 制。 从而实现了机组运行方式向单元制、 协调控制的方向发展。使电动 机驱动 和保 护 、 同期 、 快切 等专 用模块 , 将 过程控 制 和电气 控制 融为 一 个整体。 通过若干台投入 C C S 系统运行机组实践检验 , 证明这种传输方 式 能够 安全 、 有 效地 实现 C C S 、 A G C控 制 , 并获 得 了很好 的调 节效果 。 综 上所述 ,D E H系统的投入 , 使机 组能够 稳定 、 快速 地响应机 组负荷指 令变化 , 这样才有可能进一步投入协调控制系统( c c s ) 和机组 自动发电 控制( A G C ) 。从而实现了控制技术与信息技术质与量的飞跃 , 为用户确 保 了安全经 济的连续 生产 , 获得 了广大用 户的认可 和好 评 。 3结束语 随着科学的进步,技术的完善以及使用单位人员对数字电液控制 系统技术认识的提高,电液调节系统的优越性将体现得更加充分。因 此 ,加强 对数字 电液控制 系统研究 是对我 国汽轮机 数字 电液控制系 统 的发展提 供参考的重要途 径 。 ,
300MW机组数字电液控制系统的仿真
中图分 类号 :-K3 1 r 2
文献 标识 码 :人
文章 编号 :1 7 一3 0 2 0 ) 10 6 —3 l0 2 ( 0 7 0 0 60 6
交电厂 的 N K3 01 . / 3 / 3 Z 0 6 7 5 7 5 7型 ( 缸 ) 合 汽轮 机 f东 方 汽轮 机 厂 制 造 ,为 亚 f 中 间再 热 、 } = 1 临界 轴 、双缸 双排 汽 、 直接空 冷 、凝汽 式 汽轮机 。与
功 率负 荷小平 衡控 制 及 10 超 速 跳 闸 等功 能 。超 1 速 保护 () C)也 称超 速 限制控 制 ,它用 来避 免 冈 (P
收 稿 日期 :2o ̄ 91 。修 回 日期 :2 0 O o (o —5 一 0 6 l 6 2 作 者 简 介 :降爱 举 ( 6 .女 , 山 两 太 原 人 , 1 8 J 7) 9 9年 毕 业 于 两 9 宣 交通 大 r助 制 l j .叶 帅 ;
相应 容量 的锅炉 和汽 轮发 电机 配套 ,构 成大 型火 力
发 电机组 ,在 电网 中 以带 摹本 负荷 为主 ,廿可 承 担 王 部 分 凋峰任 务 。该机 型采用 数 字 电 { 制 系统 ,完 1 ! - 成对 汽轮机 的监 视与 挖制 。对某 台! 的机组 开 发
速 、仆I 叫、外 负荷 及正常 负荷 调节 ,还 可增加 主 汽
各 个 阀¨的 阀位指 令 电气 和液 压 两部分 之间 用 电
液 伺 算机 一般 是不 能直 接
认 知和处 理 的 ,这就 要求 为之 建立 一个 既能 反映 所
古 交电 厂 I ) 控 制 系统功 能如 下 。 EH a S )O P超速 保 护 控 制功 能 。包 括 1 3 o 速 、 0 V超
汽轮机数字电液控制系统的组成及功能

曲线校正后形成各 个阀门的开度指令, 阀门同时开启,对 应于4组喷 嘴同时进汽。
说出上图的在本教材中的图号,并说明阀特性曲线的特点 (快开、直线、抛物线、等百分比)
⑵喷嘴调节 在正常(额定)负荷范围内采用喷嘴调节变压 运行方式,可使机组有最好的热经济性和运行灵活性。
采用喷嘴调节、部分进汽时,当I、Ⅱ号调节阀阀杆开启到 24.6m时,Ⅲ号调节阀开启;当Ⅲ号调节阀阀杆行程达到 15.8mm时,Ⅳ号调节阀开始开启。
冷态启动:温度小于150℃。 温态启动:150~300℃。 热态启动:300~400℃。 极热态启动:温度大于400℃。 2.启动方式
本机组具有中压缸启动和高中压缸联合启动两种方式。
中压缸启动方式,具有降低高中压转子的寿命损耗、改 善汽缸热膨胀和缩短启动时间等优点。
中压缸启动时,在机组冲转前、锅炉点火升温时,蒸汽通过高压旁路,倒暖阀RFV进入 高压缸,对高压缸预暖,同时对高压主汽管、高压主汽调节阀和再热器、中压联合 汽阀进行加热;
⑴滑压控制
⑵这种运行方式能够提高机组变工况运行时的热经济性,减少 进汽部分的温差和负荷变化时的温度变化,因而降低了机组 的低周热疲劳损伤。
采用滑压运行能改变机组在变工况运行时的热应力和热变形, 使机组启停时间缩短,减小节流损失,降低给水泵功率消耗, 提高机组效益。
⑶μT= μT0 ⑷变化
⑸根据机组运行方式
(即定压运行还是滑
压运行)产生压力设
定值P0 ⑹
⑺试在定-滑-定曲线上画出相应的μT曲线 ⑻ECR/MCR-额定功率/最大功率
⑼定压运行允许的最大 负荷变化率为 3%ECR/min。 ⑽滑压运行时允许的 最大负荷变化率为 5%ECR/min。
国产引进型300MW汽轮机组液压旁路系统改造

5 性 能
a 定位精度小于全行程 的0 1%。 . .5
b 重复率小于全行程的0 1 . .%。
C 死 区在控制 信号 的 0 i 一 %范 围内可 . .% 5
4 集成型 执行 器旁路 系统特 点
a 采用机 电液一体化 、 . 集成 化、 模块 化、 小型
化设计 。结构简单、 体积小 , 无需外供油 源或气源 ,
成型 R X E A电液 执行器 取代原 系统 的液 压执行机
立
双 液 缸 作用 压
瞳:高压回路 口: 低压回路
图 1 智能集成型执行器工作原理图
3 改造方 案
a 保 留原系统减压阀、 . 减温阀。 b 拆除二台控制油站、 . 减压 阀和减温 阀液压 执行机构以及相应的油管路。
关键词
1 概 述
国产引进型 30 W 机组 , 0M 是按照美 国 WH公司
转让技术生产 的单轴、 双缸、 双排汽、 次再 热凝汽 一 式汽轮机 , 按照美国 C E公司技术设计生产的亚临界 次再热控制循环汽包炉或 自然循 环汽包炉。原型 机组无旁路系统 , 依靠锅炉 5 C %M R启 动疏水旁路
C 采用智能集成型执行器取代原系统的液压 .
执行机构 。 d 控制系统可纳入机组 D S系统 , . C 也可采用 独立的 P C可编程控制器。 L
构, 对该旁路系统进行改造。
e 仅实现压力、 . 温度正常调节与控制, 不设快
一
3 一 O
维普资讯
调 , 小可达 00 % 。 最 .5
d 输入信号 4— 0 A标准模 拟量和脉 冲量 . 2m
信号。 e 高旁减压阀全行程动作过程时间约为 6 s . 0; 低旁减压阀全行程 动作过 程时间约为 9 s 0 。减温 阀 全行程动作过程时间小于 3 s 5。
300MW机组电液调节系统异常原因分析及处理
第 5期 ( 第 1 4 ) 总 3期
20 0 6年 1 0月
山 西 电 力
S H人NXI EI ECTRI: P(W ER ( )
NO 5 ( r 3 . Se .1 4)
()t 20 c . 06
3 0MW 机 组 电液 调 节 系 统异 常原 因分 析 及 处 理 0
1 伺 服 阀 损 坏 和 E 油 系 统 异 常 经 过 H
a )2号机 组 EH 油 系统 在 2 0 0 5年 7月 1日开 始 油循 环 ,8月 1 日油循 环 合格 。8月 2 0 2日第 一 次启 动 E 油 系统 做 试验 ,压 力 为 1. a H 4 3MP ,流
量为 3 .mi。在 以后 的 调 试 过 程 中 ,流量 缓 慢 51 / n
是 E 油 系统 出现异 常的主要 原 因。经过 采取换 油 、滤油 、降温等 一 系列措 施 。问题得 到 了解 决 H
处 理 。 确 保 了机 组 的 安 全 稳 定 运 行 。
关 键词 :E 油 系统异 常 ;原 因分 析 ;处理 H 中图分类 号 :TK 6 , 2 38 文献标 识码 :B 文章编 号 i 6 10 2 (0 6 0 —0 80 l7 _3 0 2 0 ) 50 3 —3 更换 新 油 ,重 新 启 动 机 组 后 ,抗 燃 油 压 力 维 持 在 1 . a 1 . a 3 2MP ~ 4 5 MP ,流 量 维 持 在 2 / i O L r n~ a
油箱油 位 也正 常 。在 1 0月 1 6日抽 取 双机的 抗燃油 样 进 行 全 分 析 化 验 , 同 时 将 损 坏 的 伺 服 阀 送 到 MOOG公 司进 行解 体分析 原 因 。
油样 化验 结果 是 :1号机 抗燃 油 和 2号抗 燃 油 样 品的 “ 电阻 率 ( 0℃ ,Q ・ m) 2 c ”不 符 合标 准 的
300MW火电机组给水控制系统的设计.
目录1选题背景 (2)1.1引言 (2)1.2设计目的及要求 (2)2方案论证 (3)2.1方案一 (3)2.2方案二 (4)3过程论述 (5)3.1总体设计 (5)3.2详细设计 (6)3.2.1信号的测量部分 (6)3.2.2单冲量控制方式 (10)3.2.3串级三冲量控制方式 (11)3.3信号监测 (12)3.3.1给水旁路调节阀控制强制切到手动 (12)3.3.2电动给水泵强制切到手动 (13)3.3.3汽动给水泵强制切到手动 (13)3.4工作方式 (13)3.5切换与跟踪 (13)3.5.1切换 (13)3.5.2跟踪 (14)3.6控制器选型 (14)4结论 (14)5课程设计心得体会 (15)6参考文献 (15)1选题背景:1.1引言火电厂在我国电力工业中占有主要地位,大型火力发电机组具有效率高,投资省,自动化水平高等优点,在国内外发展很快,如今随着科技的进步,大型火力发电厂地位显得尤为重要。
但由于其内部设备组成很多,工艺流程的复杂,管道纵横交错,有上千个参数需要监视、操作和控制,这就需要有先进的自动化设备和控制系统使之正常运行,并且电能生产要求高度的安全可靠和经济性。
大型发电单元机组是一个以锅炉,高压和中、低压汽轮机和发电机为主体的整体。
锅炉作为电厂中的一个重要设备,起着重要的作用,根据生产流程又可以分为燃烧系统和汽水系统。
其中,汽包锅炉给水及水位的调节已经完全采用自动的方式加以控制。
给水全程控制系统是一个能在锅炉启动、停炉、低负荷以及在机组发生某些重大事故等各种不同的工况下,都能实现给水自动控制的系统而且从一种控制状态到另一种控制状态的判断、转换、故障检测也常常靠系统本身自动完成。
1.2设计目的及要求本次课程设计的要求是根据大型火电机组的生产实际设计出功能较为全面的300 MW火电机组全程给水控制系统,该控制系统的设计任务是使给水量与锅炉的蒸发量相适应,维持汽包水位在规定的范围内。
汽轮机数字电液控制系统

汽轮机数字电液控制系统摘要300 MW的自备电厂建成后,300 MW的发电设备在国内市场上占据着举足轻重的位置,目前国内300 MW的发电机组已经投入使用,为国家的经济和社会的稳定发展作出了巨大贡献。
300 MW汽轮机采用的是苏联的技术,其设备设计和制造水平与国外相比有很大的差异。
该系统使用了常规的机械式液力调整,存在灵敏度低,迟滞率大,负荷适应能力差,自动化程度低等问题,对机组的安全和经济性造成了一定的影响。
该系统具有转速控制、负荷控制、甩负荷控制功能、超速保护功能、汽轮机自启动和负荷控制功能、主汽压力控制功能等功能。
介绍了300 MW电力电子调节的设计与使用,并着重介绍了超速保护、阀门管理、ATC及甩载测试等方面的工作。
关键词:300MW机组全电调控制升速升负荷阀门管理ATC EH系统高压遮断一、绪论1.1概述汽轮机是火力发电厂中的一个关键装置,它由高温和高压水蒸气带动,实现了热能向机械能的转化。
水轮机组带动发电机旋转,将机器能量转换成电能,电力网向不同的客户供电。
为保持电力系统的运行,需要将汽轮机的速度控制在接近标称速度的极低值,一般在-1.5-3.0 r/分钟之间。
为此,汽轮机需要有一个稳定的、自动化的设备。
水轮发电机组的发展经过了若干个发展时期,首先采用一组机械式的水力机械,完成了对速度的自动调整和对负载的人工控制。
这种体系通常被称作是水力调整。
1.2 300MW国产机组调节系统的现状及改造国内300 MW汽轮机的调速控制主要是由纯水压力的低压汽轮机油和凸轮配汽器组成。
这种调整系统是蒸汽机的常规运行方式,它具有一定的可视性,但是它的运行和数据收集都要靠手工完成,很难适应当前蒸气机组的高自动化、现代化的运行管理需求,所以需要对机组进行全电调的改进,从而达到自动控制的目的。
改进后的全电调速系统包括:液压伺服、高压防油屏蔽、机油供给、低压汽轮机油屏蔽等四大部分。
燃油供给系统的作用是供给高压燃油,驱动伺服系统,高压燃油屏蔽系统。
国产引进型300MW汽轮机组液压旁路系统改造

国产 引进 型 30M 机 组 是按 照 美 国 WH公 0 W
左右 , 均采 用手 动操 作方 式 , 组正 常运 行 中旁路 机
系统不 投入 热备 用 。
司转 让技 术 生 产 的单 轴 、 缸 、 排 汽 、 双 双 一次 再 热 凝汽 式 汽 轮 机 , 套 的 锅 炉 按 照 美 国 C 配 E公 司 技 术设计 生 产的亚 临界 一次再 热 控制循 环 汽包 炉或
炉点火 至 汽轮 机挂 闸前 投 入 , 锅 炉 起 动 的 过 程 在 中 , 以提升 主蒸 汽温度 、 力 。旁 路 系统运 行 时 用 压
一
为进 一步 简化 系 统结 构 , 高 旁 路 系 统运 行 提
的 可靠 性 、 控 性 和 可 操 作 性 , 据 引 进 型 30 可 根 0
Ab t a t:A y o e o sr cig te h d a lc o eae y p s y tm fte lc nsd tp 0 W ta t bie。 sr c wa fr c n ta t h y ru i p r td b — a ss se o h ie e y e 3 0M n se m ur n b k n U e f a y ma i g S o REXA itl g n itgae tp ee to h d a i a tao , i ee td。 wi wh c te y p s nel e t ne r td y e lcr- y rul i c cu tr s prs ne t h ih h b ・ a s po lm ft epat fn tb i g a l O b uti evc n te n r lwa rbe o s ,o o en be t p n sr ie i h o ma y。h sb e ov d. h e a n s le e
300MW汽轮机数字电液调节系统伺服系统调试
中图分类号 : TK2 3 7 6 . 2
文献标识码 : A
文 章 编 号 :O 7 6 2 ( 0 1 O — 0 1 一 O 10— 912 1)9 12 2
1 7 V PC 卡 自 检 正 常 .
电 液 调 节 系 统 主 要 是 控 制 汽 轮 机 的 高 压 主 汽
门 、 压 主 汽 门 、 压 调 门 、 压 调 门 。高 压 调 门 、 中 高 中 中
可 点 击 菜 单 栏 下 的 图 标 ) VP 卡 调 试 界 面 的 左 下 , C
在 调 试 前 首 先 要 做 以 下 几 方 面 的工 作 :
1 1 安 全 检 查 .
系 统 联 调 期 间 开 工 作 票 , 地 油 动 机 附 近 派 专 就 人 检 查 确 保 无 人 工 作 , 免 油 动 机 开 关 动 作 误 伤 人 以
21 0 1年 5月
内 蒙 古 科 技 与 经 济
I n rMo g l ce c c n lg n e n oi S in eTe h oo y& Ec n my a oo
M a 01 y2 1
第 9 总 第 25期 期 3
No. 9 Tot lNo. 5 a 23
2 .1 执 行 程 序
运 行 VPC DBG. EXE 调 试 程 序 , 文 件 菜 单 下 在
打 开 “*. C” 件 。 VP 文
22 . 选 择 卡 件
迟 缓 率 过 大 等 问 题 影 响 机 组 的 稳 定 运 行 , 以 在 设 所
备 大 、 、 修 时 及 时 对 伺 服 系 统 进 行 调 试 及 出 现 的 中 小 问题 及 早 处 理 是 尤 为必 要 的而 且 还 要 必 须 持 非 常 谨 慎 。 下 面 就 现 场 实 际 的 应 用 谈 一 下 调 试 及 故 障 处 理
华能上安电厂300 MW机组给水泵汽轮机控制系统的改造开发及应用
华能上安电厂300 MW机组给水泵汽轮机控制系统的改造开发及应用景效国;张建军;张伟;刘伟;刘玉杰;郄彦明;刘庆红;李素芳;陈勇【期刊名称】《热力发电》【年(卷),期】2000(000)005【摘要】介绍华能上安电厂1号机组给水泵汽轮机控制系统(MEH)改造背景、系统配置、主要功能及其软件结构.实践表明,采用INFI90硬件对GE 公司的给水泵汽轮机控制系统进行改造,能够提高机组运行经济性和自动化水平,为同类型机组MEH改造提供了经验.【总页数】2页(P41-42)【作者】景效国;张建军;张伟;刘伟;刘玉杰;郄彦明;刘庆红;李素芳;陈勇【作者单位】国家电力公司热工研究院,西安,710032;国家电力公司热工研究院,西安,710032;国家电力公司热工研究院,西安,710032;国家电力公司热工研究院,西安,710032;华能上安发电厂,河北井陉,050310;华能上安发电厂,河北井陉,050310;华能上安发电厂,河北井陉,050310;华能上安发电厂,河北井陉,050310;华能上安发电厂,河北井陉,050310【正文语种】中文【中图分类】TM61【相关文献】1.广州珠江电厂300 MW机组分散控制系统一体化改造的经验 [J], 郑建平2.湛江发电厂一期2×300MW机组给水泵汽轮机保护系统的换型改造及完善 [J], 庞继清;黄康强;梁中荣3.铁岭发电厂300MW机组DCS改造及协调控制系统投入 [J], 韩庆民;刘双宝;王迎东4.铁岭电厂300MW机组给煤机控制系统改造 [J], 杨庆柏;韩希昌5.华能上安电厂2×350MW机组2号机给水泵汽轮机电液调节控制系统改造 [J], 张伟;倪申;景效国;李轶因版权原因,仅展示原文概要,查看原文内容请购买。
浅析电液调节系统性能及改造方案
一
科l l 【 技 论 坛
浅析 电液调节系统性能及改造 方案
王 朕
( 黑龙江省 火电第一工程公司, 黑龙 江 哈 尔滨 10 0 ) 5 0 0
摘 要: 随着汽轮 发电机级容量的增大、 蒸汽参数 的提 高, 对机组的安全性 、 经济性 、 动化水平的要 求也越来越 高。传统的机械 ( 自 液压 ) 节 型调 系统 MHC已不能完全适应机组 自动化 水平提 高的要求 , 因而促进 了汽轮机 电液调节 系统 E HC的开发 与发展 。 关键词 : 汽轮机 ; 电液调节 系统 ; 转速 表 1 局部转速( 荷 ) 负 不等率% 1 电液调节系统 的性能 不要盲 目追求大而全 ,功能 1 转速不等率 6 给定值不 变 , . 1 : 在额定参 的确定应 以实 用为原 则 , 根 数下 , 机组功率 由零至额定值对应的转 速变化 , 据机组的容 量、 型 、 构特 类 结 以额定转速 的百分率表示称转速不 等率 。转速 点和机组 在电网中的作 用选 不等率应连续 可调 , 一般为 3 一 %。 % 6 择。 23在条件许可 时 , 制 . 控 1 局部 转速( . 2 负荷) 不等率 8 在 某一给定 : 功率点处, 小范 围内的转速不等率 。 在调节系统 器 宜 采用 与 机组 D S分 散 机组 功率 ( ) C MW 迟缓率 ( %) O < O.5 1 静态特性 曲线上 , 为给定功率处 的斜率 。 局部转 控 制系统 硬件一 体化 配置 , ≤ 1 0 0  ̄2 0( 0) < O1 .0 速不等率列于表 1 。 对 于 无 D S的 机 组 , 选 用 1 0 0 包 括 2 0 C 应 < O0 6 0 l3 -迟缓率 8: 不会 引起调节汽 门位置改变 能满足 电液调节系统专用要 > 2 0 的稳态转速变化的总值 ,以额定转速的百分率 求 的控制器。 表示 。不同容量机组迟缓率要求值列于表 2 。 24在实现相 同功能 的条 件下 ,应 以投资 用控制接 口, . 独立的 P 调节器。电液转换器车 I 日 ! I 液压)系统脉 冲油路 相并 1 . 4为保 证 电网运 行 的可 靠性 和 电能 质 少 、 改造工作量小、 系统简单 、 实用 、 可靠为确定 出 的控制 油与机械 f 联, 构成并级调 节。 原系统同步器在任意负荷位 量, 应有一次调频能力 。 电液调节系统中设有 改造方案的基 本原则 。 在 次调频不灵 敏区, 为保证功率控制的稳定性 , 3 实施 电液调节系统改造方案 置时 , 可采用转移方式实现联合控制 , 原系统 在 般设置较大 ,因而丧失 了机组的一次调频能 3 同步器型 电液调节系统。机械( 压) . 1 液 调 同步器处 于最大负荷位置时 ,该系统可近于纯 在任何情况下机械( 液压) 调 力, 对电网的安全性带来 了不利的影响。 一次调 节系统的同步器 电动机转速高 、 惯性大 、 分辨率 电液调节方式运行 , 频不灵敏区应尽量小 , 要求不大于± . H 。 0 z 1 低, 难与 C S A C接 口, C 、G 实现 自动控制。为适 节系统 同步器均可进行无扰干预。一般具有基 1 转速 、 给定 : 速调节范 围一般 为 应机组 自 . 5 负荷 转 动化改造的需要 , 对其进行改造 , 本操作控制方式 、基本控制功能 、必备控制功 必须 5 — 6 0 r n 并连续可调 ; 率给定应能连续 以克服原有 同步器的固有缺 点。其改造方式为 能 、 护功能 、 030r i, / a 功 保 限制 功能和试验功能 , 在系统故 应 该 可调 , 分辨率不大于额定功率的 0 %。 . 5 原 机械f 液压) 调节系统 、 保护系统不 变 , 只改造 障必须退 出运行的情况下 , 具有保位 功能。 改造 工作量小 、 投资少 、 维护和 1 汽轮发 电机组甩负荷 后 ,汽轮机在调 同步器 。其控制方式可由协调控制 系统直接控 方 案结构简单 、 . 6 运行灵活 、 可靠性 高。 适用 于中、 小 节系统控制下 ,瞬时最高转速不应使危急保安 制 , 由独立的 P 调节器控制 , 或 I 与原机械( 液压) 运行费用低 、 器动作 。其瞬时最高飞升转速一般不超过额定 调节系统构成串级调节。只要求实现机炉协调 型机组尤其是小机组调节系统的改造 。目前已 2 2 MW 5 MW 1 0 15 转速 的 8 %。机组甩负荷后 , 汽轮机在调节系统 控制 、 电网自动发电控制功能 。 该方案具有方案 在 1 MW 、5 、O 、0 MW 、2MW 机 组 失控条件下 ,主汽门关 闭后 的最高转速称危急 简单 、 投资小 、 改造工作量最小 、 改造工期最短 、 上采用。 3 透平油纯电液调节系统 。保留油系统 、 . 4 超速最高转速 。危急超 速最高转速最高不得大 易于实现等特点 , 但控制精度相对较低 。 适用于 于额 定 转 速 的 l %。 8 机械 ( ) 节系统 运行正 常 、 液压 调 并在 有限 的资 保安系统 、 油动机 和配汽机构 , 一只油动机 配置 I 超速保护系统 :机械危急保 安器脱 扣 金条件下、 . 7 只要求实现机炉协调控制 、 自动调度 只电液转 换器 , 独立 的控制接 口, 的刃调 独立 一般根据机组的实际需要设置功能 , 也可 动作机组跳闸 , 脱扣动作设定转速一般为额定 控制或 自动发 电控制功能的机组 ,曾应用 在国 节器。 转速的 10 - %,复位转 速应 高于额定转速 。 产 l o W、2M 机组上 , % 1 1 + o M 15 w 目前较少采用。 实现电液调节 系统全部功能 。 该方 案与高压抗 电气超速保护动作机组跳闸(P ) O T, 动作转速 可 3 . 2电液并 存 、 跟踪 、 切换运行 电液调节 系 燃油纯电液调节系统相 比较 ,系统结构相对简 改造工作量 相对 小 、 投资相对少 、 对油质的 等于或低 于机 械危急保安 器动作转速 1 2 统。原机械( %一 % 液压) 调节系统 、 系统 、 油 保护系统 单 、 运行 费用相对低 、 运行维护 方便 。 额定转速 , 当作为超速后备保护 时 , 其动作转速 全部保 留; 增加 电液转换 器 、 电液切换装 置 、 要求 相对低 、 电 应 比危急保安器动作转速高 1 一 % % 2 额定转速。 液跟踪装置和控制器 ;采用 多个调节汽 门配置 适用 于大 、 小 型各类 机组调节 系统 的改造。 中、 1 稳定性 : . 8 在额定参数 下 , 转速波动不应 只油动机 、一只电液转换装置和公用控制接 目前 , 1— 0 MW 机组上均有应用业绩 。 在 230 大于额定转 速的土 01 在额定参 数下 , . %; 功率 口, 独立的 P 调节器控 制。 I 机械f 液压) 调节系统 3 抗燃油纯电液调节系统 。 改造方式除 . 5 其 采用高压抗燃油系统 , 一 波动不应大于额定功 率的- . +5 0 %;按技术条件 和电液调节系统并存 、 切换 、 跟踪运行 , 般 以 调节汽 门外全部改造。 一 一只电液伺服阀 , 规定 的最大升速率下 ,其转速 的超调量应小于 电液 调节系 统为主要 运行方 式 , 械( 机 液压) 调 只调节汽门配置一 只油动机 、 额定转速 的 02 调节系统动态过程应能迅速 节系统作跟踪 备用 。要求具有基本操作控制方 保护系统通 过隔膜阀与危急遮 断系统接 口, .%; 独 稳定 , 理想状态为非周期过程 , 实际多为衰减振 式 、 基本控制功能、 必备控制功能 、 保护功能、 限 立 的 P 调 节器 。可实现电液调节 系统全部 功 1 荡过程 , 振荡次数不应超过 2 3 。 -次 制功能 、 验功能 , 试 在系统故障必须退 出运行 的 能 , 也可根据机组 的实际需要设置功能。 系统 该 运行方式灵活等特点。 结构相 1 油动机动作过程时间 : 、 . 9 高 中压 调节 汽 情况下 , 自动无扰 切换到机 械( 能 液压) 调节 系 具有控制精 度高 、 改造工作量大 、 对复杂 , 对油质 的要求相对较高 , 工作量相 改造 门和高 、 中压主汽 门油动机动作过程 时间 t 为 统。该方 案系统结构相对复杂 、 o 维护工作量大 。适用于 中、 小型机组 的改造 , 在 对较 大。 适用于大容量机组调节系统的改造 , 目 动作延迟时间 t和关闭时间 t 2 之和。 2 实施 电液调节系统改造的基本原则 调节系统改造初期 ,尤其是在 2 0 W 机组上 前已广泛应用各种类型调节系统和各容量等级 0M 2 以实现机组启动控制 、 炉协调控制 、 采用较 多。 前 , . 1 机 目 电液并存 、 跟踪 、 切换运行 电液 的机 组 上。 电网 自动发 电控制为汽轮机调节系统改造 的主 调节系统 已逐步被纯电液调节系统取代。 要 目的 。 3 . 3电液并存联合调节 电液 调节系统 。原 2 应根据机组在 电网中的作用 、机组的 机械( . 2 、 液压) 系统 、 调节 油系统 、 保护 系统全部保 具体情况及实际需求选 择功能 。功能的确定与 留, 只增加电液转 换器和控制器 。 采用多个调节 责 任 编 辑 : 丽 敏 赵 系统结构 、 改造投资 、 造工作量等密切相 关 , 汽 门配置一只电液转换装置 、一只油动机和公 改
300MW机组数字电液控制系统DEH仿真机研发
3 0 0 MW 机 组数 字 电液 控 制 系统 DE H 仿 真 机 研 发
李 浩 ,孙海蓉
( 华北电力大学 控制与计算机工程学 院 ,河北 保定 0 7 1 0 0 3 )
摘 要 :根 据 国 电达 州 电厂 3 0 0 MW 机 组 设 计 并 开 发 了仿 真 机 D E H 系 统 ,利 用 国 电 智 深 E D P F — N T P L U S控 制 系统 仿 真软 件 搭 建控 制 模 型 。 经反 复调 试 ,证 明 该 系统 能 正 确 反 映 原 设 计 思 想 。实 现 机 组 的 启 停 、 运
1 . 1 仿 真机 特点 简介
达 州 电厂 仿 真 机 的 硬 件 构 成 如 图 1所 示 。该
硬 件 系统 主 要 包 括 模 型 服 务 器 ( 装 载 及 运行 机 、
的培 训 和 考 核 , 同 时 也 可 对 其 他 类 型 机 组 运 行 及 炉 、电模 型 及 通 讯 软 件 的仿 真 支 撑 平 台 ,是 仿 真 管 理 人 员 进 行 培 训 和 考 核 ;满 足 工 程 技 术 人 员 对 机 硬 件 系 统 的 核 心 部 分 ) 、工 程 师 站 ( E D P F — N T 该 类 型 设 备 及 其 系 统 改 进 的 研 究 分 析 任 务 。 电 厂 P L U S中组 态 、管 理 和维 护 工 程 的计 算 机 ,是 虚 拟 仿 真 机 也 可 用 来 进 行 电 厂 运 行 分 析 和 控 制 系 统 研 DC S的 核 心 ) 、历 史 站 ( 采 集 、储 存 以 及 检 索 点 究 ,对 实 际 发 电 机 组 发 生 的 故 障进 行 验 证 ,并 可 数 据 、报 警 和 S O E事 件 ,显 示 历 史 趋 势 曲线 、报
引进WH技术国产300MW汽轮机组液压旁路系统改造

门不参与调节 , 因而旁路系统仅在锅炉点火 至汽轮机挂 闸前 投入 , 在锅炉启动的过程 中, 以提升主蒸汽温度 、 用 压力 。旁 路系统运 行 一 般 高 压旁 路 开 启 2 % 左 右 , 压 旁 路 开启 0 低 5 %左右 , 0 均采用手 动操作 方式 , 机组正 常运行 中旁 路系 统
不投 入热备用 …。
为设备原理 图。由智能可控电机和独立的 、 封闭的液压控制 系统组 成 , 采用高度集 成化 、 块化 、 模 小型化设 计 , 有组件 所 内部集成 , 一体化结构 。 智能可控 电机接受控制 模块 的功 能
该型机组一般 采用苏尔 寿液压执行 机构 的液压旁路 系 统 、 门子电动执行机构 的电动旁路或 国产电动执行机构 的 西 电动旁路 。近年来 , 普遍 反映旁路 系统不 能正 常投入 , 其 尤 是液压执行机构的液压旁路 系统 , 液漏 泄 、 油 执行 机构卡涩 ,
PineControl DEH控制系统在300MW汽轮机上的应用
些D S C 处理器主备切换不正常,处理
() 2 利用 PnC D组态软件 ,实现 i A e 多回路 、多变量调节 ,具有较强的适应 外界负荷变化和抗内扰能力 ,成功地配
合D S C 系统连续长时间投入双进双出中
器的初始化易引发意外的问题。
() 7 由于 P e ot l E i C n o D H控制系统 n r 以PC L 作为硬件平台, 用于 工
一
可实现3 位或 6 位高精确度复杂的计 2 4
算过程 ,并使控制逻辑更简单高效。在 蒸汽参数稳定的情况下 .可保证功率偏
差小于 1 MW,转速偏差小于 1/ i。 mn r
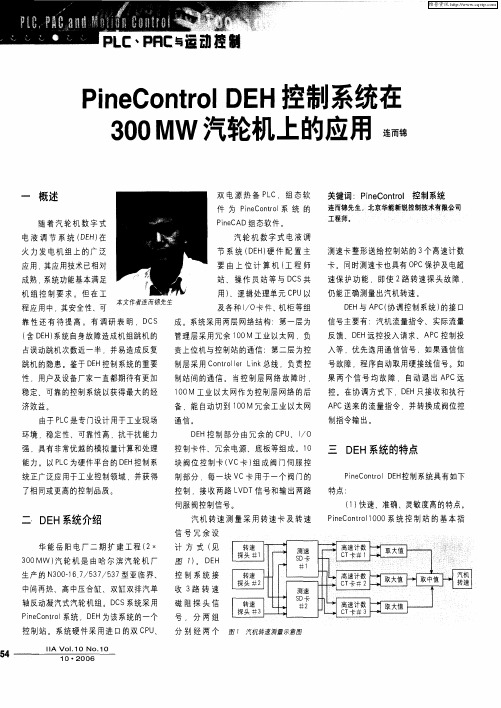
组从调试到投入商业运行 ,经过多次开 停机及 1 8 次运行考验 ,D H系统运行 6 E 情况良好 ,无一次 由于系统自身故障造 成机组跳机 . 在机组启动升速( 见图2 、 ) 跨越临界转速 、超速试验、并网升降负 荷、变工况运行、抗拢动能力、一次调
信 号 冗 佘 设
计 方 式 ( 见
30 0 MW) 汽轮机 是 由哈 尔滨汽轮 机厂 生产 的N 0 _67 5 7 5 7 30 l./ 3 / 3 型亚临界、
图 7 。D H ) E 控 制 系统 接
中间再热、高 中压合缸、双缸双排汽单
轴反动凝汽式汽轮机组。D S系统采用 C PnC nrl i ot 系统 ,D H为该系统的一个 e o E 控制站 。系统硬件采用进 1 3的双 C U P、
能力。以PC为硬件平台的D H控制系 L E
要 由上 位 计 算机 ( 程 师 工
站、操作 员站等与 D S C 共
用) 、逻辑处理单元 C U以 P 及各种 io卡件、 / 机柜等组
伺服阀原理

300MW汽轮机电液控制系统技术改造2007-11-13 00:19:16 作者:heixue671023 来源:热电联盟浏览次数:155 文字大小:【大】【中】【小】一、项目提出的背景1.1 300MW汽轮机电液控制系统洛阳首阳山电厂二期2x300MW汽轮机为日立公司TCDF-33.5亚临界压力、中间再热、双缸双排汽、冲动、凝汽式汽轮机,于1995年12月和1996年3月投产。
汽轮机调节系统为数字电液调节(D—EHG),采用低压汽轮机油电液调节。
执行机构的设置为1个高压油动机带动4个高压调速汽门,2个中压油动机带动2个中压调速汽门。
每个油动机由一个电液伺服阀控制,1台汽轮机的3个油动机(CV、左右侧ICV)的电液伺服阀均为日本制造的Abex415型电液伺服阀。
控制油和润滑油均采用同一油源即主油箱内的N32号防锈汽轮机油,在控制油路上安装一精密滤网(精度为51μm)。
1.2 存在问题首阳LU电厂3、4号机组从1995年试运开始,机组启动冲转过程中经常出现油动机突然不动的现象,经检查控制系统正常,信号传输正常,均为伺服阀故障所致,伺服阀更换后调节系统恢复正常。
机组在带负荷稳定运行和中压调节门活动试验日寸,也出现油动机不动的情况及油动机全开或全关的现象,检查均为伺服阀故障。
伺服阀出现故障必须进行更换,而这种调节系统设计形式伺服阀无法隔离,只能被迫停机更换。
首阳山电厂3、4号机组由于伺服阀原因造成的停机:2000年分别为8次、5次,2001年分别为1次、2次;截止到2002年6月仅3号机组由于伺服阀原因造成的停机就达4次。
对拆下来的故障伺服阀进行检查,发现其内部滤芯堵塞、喷嘴堵塞、滑阀卡涩。
伺服阀内部滤芯堵塞引起伺服阀前置级控制压力过低,不能控制伺眼阀的第2级滑阀运动,致使油动机拒动(对控制信号不响应);喷嘴堵塞油动机关闭;伺服阀卡涩,使油动机保持在全开或全关位置。
油质污染是造成上述故障的主要原因,油质污染造成伺阀卡涩的故障占伺服阀故障的85%[1]。
300MW机组介绍DEHSCS

机械保安部分
• 挂闸装置 • 危急遮断器 • 危急遮断滑阀
试验块
润滑油压低实验块 真空低实验
20-1/LBO
F1
F2
20-2/LBO
ห้องสมุดไป่ตู้63-1/LBO
63-3/LBO
63-2/LBO 63-4/LBO U
F
SCS是整个DCS系统中的顺序控制系统 SCS是整个DCS系统中的顺序控制系统 • 作为典型的开关量控制系统,一般将其分为三层: 单元机组级、功能组级和子功能组级。我厂的 SCS系统根据锅炉、汽机、发电机、空冷岛等其 它附属设备及工艺系统的运行要求,将构成不同 的顺序控制功能子组。 • 目前单元机组级尚无应用成功的范例,一般就到 功能组级。这里我主要介绍一下其中常规的“引 风机功能组”中的启动。
高压主汽阀执 行机构
油动机照片
低压主汽阀执 行机构
高压调节阀执 行机构
低压调节阀执 行机构
调节阀油动机
危急遮断系统
为了防止汽轮机在运行中因部分设备工作失常可能导致机组发 生重大损伤事故,在机组上装有危急遮断系统。基本构成如下:
1. 2. 3.
OPC电磁阀组 AST电磁阀 薄膜阀
OPC-AST控制块照片 OPC-AST控制块照片
300MW汽轮机DEH及SCS系 300MW汽轮机DEH及SCS系 统简介
• 汽轮机电液控制系统DEH的功能,主要包 括大范围(从盘车转速到额定转速)的转 速控制、负荷控制、异常工况下的负荷限 制、主蒸汽压力控制、阀位控制及自动同 期等。其原则性结构框图如下所示:
• 一、转速控制 • 汽轮机的转速控制用以实现大范围的转速自动调节,即从盘车转速起将汽轮机的转速逐 汽轮机的转速控制用以实现大范围的转速自动调节, 渐提升到额定转速。转速调节范围一般为50~3300r/min,调节准确度为 渐提升到额定转速。转速调节范围一般为 ,调节准确度为1~2 r/min 轮机转速定值和实际转速偏差信号经过转速控制回路输出, 轮机转速定值和实际转速偏差信号经过转速控制回路输出,通过负荷控制回路给出阀门 开度指令,开度指令经阀门控制回路去操作蒸汽阀门的启闭。 开度指令,开度指令经阀门控制回路去操作蒸汽阀门的启闭。 • 汽轮机根据运行人员设定(或应力计算结果)的目标转速和升速率,从盘车速度升速到 汽轮机根据运行人员设定(或应力计算结果)的目标转速和升速率, 额定速度。汽轮机转速由冗余的速度传感器检测。 额定速度。汽轮机转速由冗余的速度传感器检测。 • 转速控制功能一般包括下列内容:①升速控制;②摩擦检查;③中速暖机;④临界转速 转速控制功能一般包括下列内容: 升速控制; 摩擦检查; 中速暖机; 区内的升速率控制; 发电机同期时的转速控制。 区内的升速率控制;⑤发电机同期时的转速控制。 • 一般的转速控制采用比例加积分控制器(PI控制器)来进行。该比例积分控制器决定阀 一般的转速控制采用比例加积分控制器( 控制器 来进行。 控制器) 门的流量要求, 门的流量要求,从而通过检测实际转速与给定转速的偏差以选定的升速率使汽轮机升速 • 在汽轮机的升速过程中,转速定值是一个按预定升速率变化的值。 在汽轮机的升速过程中,转速定值是一个按预定升速率变化的值。 • 大部分电调采用上述方法产生可变的转速定值来实现汽轮机升速过程中的转速控制 有的电调系统采用升速率作为被调量来实现升速过程中的转速控制。 有的电调系统采用升速率作为被调量来实现升速过程中的转速控制。 • 汽轮机启动过程中的升速率可以由人工在规定的几个值中选择,也可以由控制系统根据 汽轮机启动过程中的升速率可以由人工在规定的几个值中选择, 热应力计算的结果自动选择。 热应力计算的结果自动选择。 • 在汽轮机升速过程中,如果运行工况出现异常,如轴振动大,转子热应力过大等 在汽轮机升速过程中,如果运行工况出现异常,如轴振动大, 系统能够自动闭锁转速定值或升速率定值, 系统能够自动闭锁转速定值或升速率定值,使汽轮机维持在当前转速或降低至设备可接 受的转速,实现转速的保持。控制系统也可接受人工指令转入保持状态。 受的转速,实现转速的保持。控制系统也可接受人工指令转入保持状态。当异常状态消 失后,可自动继续升速。在临界转速范围内,转速不能保持,同时, 失后,可自动继续升速。在临界转速范围内,转速不能保持,同时,在临界转速范围内 控制系统具有自动提高升速率的功能。 控制系统具有自动提高升速率的功能。
300MW机组DEH系统的控制与调试
300MW机组DEH系统的控制与调试作者:高飞张前一彭洁来源:《城市建设理论研究》2013年第17期摘要:本文以某电厂300MW机组汽轮机数字电液调节系统(简称DEH)为例,介绍了300MW机组DEH系统的控制系统结构、实现功能及调试要点。
关键词:DEH系统;系统结构;控制功能中图分类号:TM31文献标识码: A 文章编号:一、工程概况某电厂300MW机组,配有2个高压主汽门(TV)、4个高压调门(GV)、2个中压主汽门(RSV)和2个中压调门(IV)。
汽轮机调节系统为高压抗燃油型数字电液调节系统,控制系统采用了ABB北京贝利控制有限公司的Symphony系统,液压系统采用了上海汽轮机控制工程有限公司成套的高压抗燃油EH装置。
二、控制功能1、超速保护部分超速保护部分的主要作用是提供转速三选二、油开关状态及汽机自动停机挂闸(ASL)状态三选二、超速保护逻辑、超速试验选择逻辑以及DEH跳闸逻辑,它控制着OPC电磁阀,同时汇总DEH相关跳闸信号后通过硬接线送ETS。
超速保护(OPC)通过控制OPC电磁阀快速关闭GV和IV,有效防止汽轮机转速飞升,并将转速维持在3000r/min。
2、基本控制部分(1)转速控制为保证汽机安全通过临界区,当实际转速在920~2000r/min、2120~2820r/min时,转速进入临界区,升速率自动设置为500r/min。
转速临界区的范围可通过工程师站在线修改。
当转速达到2949~2951r/min时,程序自动进入HOLD状态,表示进入TV/GV切换阶段。
运行人员发出TV/GV切换命令后,GV开始以1%/s的速率缓缓关闭;当GV已影响到汽机转速时,TV以2%/s开启。
当TV开度达到100%时,汽机转速由GV控制,TV/GV切换结束。
TV/GV 切换过程中,汽机转速将保持在2950r/min附近。
切换结束后,GV控制汽机升速到3000r/min。
3000r/min定速后,可以进行自动同期。
汽轮机数字电液控制系统的改造
() 2 真空 过低保护 。真 空过低会 引起 排汽温度 升高 , 低压 缸
变形 , 损坏末级 叶片 , 机组振动大 。 ( ) 向位移遮断 。汽 轮机 轴向位移 运行 中受到严 格限制 , 3轴
超过允许值将使旋转部位产生摩擦 。
() 4 汽轮机严重超 速( %) 10 保护 。严重超 速可损害汽 轮发 1 电机组 , 甚至整个轴系断裂 。
发变组故 障( 电气提供跳 闸信号 ) 。⑥手动跳机 。⑦高压缸胀差 ( 高缸胀差 大一 值报警 信号与高 缸胀差大二 值相“ )中压缸 与” ,
胀差 ( 中缸胀差 大一值报 警信号 与中缸胀差 大二值相“ )低 与” ,
设 簟 与 幢 28 8 置 理 维 0 № 圈 0
维普资讯
二、 系统 改 造
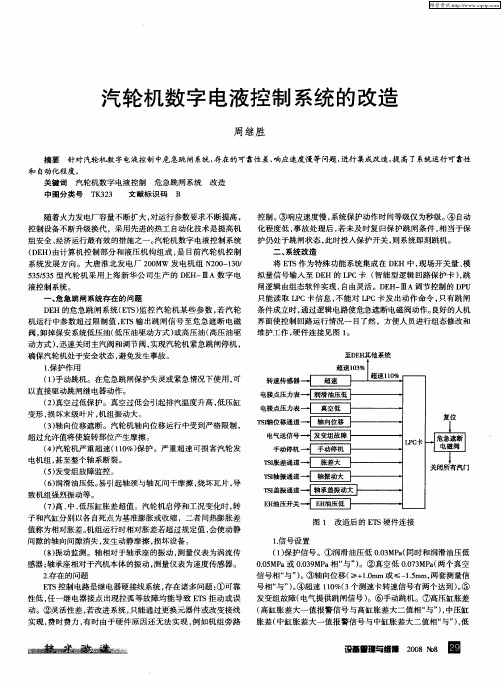
将 E S作为 特殊 功能系统集成 在 D H 中, T E 现场开关量 、 模
5 55 5型汽 轮机采用 上海新 华公 司生产 的 D H一1 3/3 E 1A数 字 电 1
液控C卡 ( 能型逻辑 回路保 护卡 )跳 E P 智 , 闸逻辑 由组态软 件实现 , 自由灵活 。D H ⅢA调节控制的 D U E一 P 只 能读 取 L C卡信 息 , P 不能对 L C卡发 出动作 命令 , P 只有跳 闸 条件成立时 , 通过逻辑 电路使危急遮 断电磁 阀动作。 良好的人机 界面使控制 回路 运行 情况一 目了然 ,方便人员进行组态修改和
感器 ; 轴承座相对于汽机本体的振动 , 测量仪表为速度传感器 。
2存在的 问题 . ES T 控制 电路是 继电器硬接线系统 , 在诸多 问题 : 存 ①可靠
性低 , 任一继 电器 接点 出现拉弧 等故 障均能导致 E S拒 动或误 T 动 。②灵活性差 , 若改进系统 , 只能通 过更换元器件或改变接线 实现 , 费时费力 , 时由于硬件原 因还无法 实现 , 有 例如机 组旁路
REXA电液执行机构在300MW火电机组给水泵汽轮机上的应用与典型故障分析
REXA电液执行机构在 300MW火电机组给水泵汽轮机上的应用与典型故障分析[摘要]REXA电液执行机构作为控制系统的一种重要调节器在300MW火电机组给水泵汽轮机低压调门上广泛使用。
通过REXA执行器带动低压调门油动机动作,改变给水泵出力来进行给水流量调节。
REXA执行机构作为重要辅机执行机构其安全可靠精准的控制直接影响机组给水调节的品质,特殊情况下将直接威胁机组的安全运行。
本文分别介绍REXA电液执行机构的结构、原理、应用以及从设备机械结构、硬件部分、人员调试及设备工作环境四个方面引发的设备典型故障进行分析。
为类似机组提供参考。
关键词电液执行机构控制原理故障1.概述大型火电机组给水控制系统要求调节迅速准确、抗干扰能力强、安全可靠性高、两台给水泵汽轮机出力高度匹配,无论是何种工况,控制系统均能够满足系统要求。
REXA电液执行机构是将液压、机械、电子、控制技术有效结合的一种一体化电液执行机构。
集成了电动执行器的智能化和液压执行器的动力、高精度。
其具有结构简单、可靠性高、控制精准、操作方便等特点。
作为给水泵汽轮机调节器,它故障率低、动作迅速精准能够满足各类工况下的调节需求。
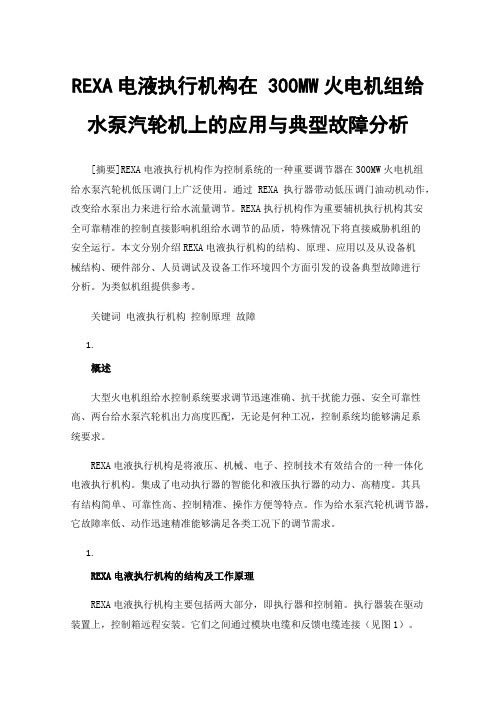
1.REXA电液执行机构的结构及工作原理REXA电液执行机构主要包括两大部分,即执行器和控制箱。
执行器装在驱动装置上,控制箱远程安装。
它们之间通过模块电缆和反馈电缆连接(见图1)。
2.1执行器执行器部分的核心是电液动力模块,包括马达、齿轮泵、流量配对阀、贮油等(见图2)。
2.2 控制箱控制箱包括位置控制处理器(PCP)、电源供应、马达驱动器、保险丝、过滤器和一个终端(见图2)。
(图2)2.3 动作原理根据设置时确定的行程和信号范围,位置控制处理器(PCP) 把外部送入的控制信号转化为目标位置,执行器的当前位置通过装在其上的反馈组件测定。
目标位置和当前位置间的差值为控制偏差。
如果偏差超出了死区(用户设定),PCP将启动马达来重新校正。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
300MW汽轮机电液控制系统技术改造[作者:王源景,许顺祥发表时间:2007-12-3 阅读:112]一、项目提出的背景1.1 300MW汽轮机电液控制系统洛阳首阳山电厂二期2x300MW汽轮机为日立公司TCDF-33.5亚临界压力、中间再热、双缸双排汽、冲动、凝汽式汽轮机,于1995年12月和1996年3月投产。
汽轮机调节系统为数字电液调节(D—EHG),采用低压汽轮机油电液调节。
执行机构的设置为1个高压油动机带动4个高压调速汽门,2个中压油动机带动2个中压调速汽门。
每个油动机由一个电液伺服阀控制,1台汽轮机的3个油动机(CV、左右侧ICV)的电液伺服阀均为日本制造的Abex415型电液伺服阀。
控制油和润滑油均采用同一油源即主油箱内的N32号防锈汽轮机油,在控制油路上安装一精密滤网(精度为51μm)。
1.2 存在问题首阳LU电厂3、4号机组从1995年试运开始,机组启动冲转过程中经常出现油动机突然不动的现象,经检查控制系统正常,信号传输正常,均为伺服阀故障所致,伺服阀更换后调节系统恢复正常。
机组在带负荷稳定运行和中压调节门活动试验日寸,也出现油动机不动的情况及油动机全开或全关的现象,检查均为伺服阀故障。
伺服阀出现故障必须进行更换,而这种调节系统设计形式伺服阀无法隔离,只能被迫停机更换。
首阳山电厂3、4号机组由于伺服阀原因造成的停机:2000年分别为8次、5次,2001年分别为1次、2次;截止到2002年6月仅3号机组由于伺服阀原因造成的停机就达4次。
对拆下来的故障伺服阀进行检查,发现其内部滤芯堵塞、喷嘴堵塞、滑阀卡涩。
伺服阀内部滤芯堵塞引起伺服阀前置级控制压力过低,不能控制伺眼阀的第2级滑阀运动,致使油动机拒动(对控制信号不响应);喷嘴堵塞油动机关闭;伺服阀卡涩,使油动机保持在全开或全关位置。
油质污染是造成上述故障的主要原因,油质污染造成伺阀卡涩的故障占伺服阀故障的85%[1]。
1.3 油质状况及防止伺服阀卡涩的措施由于3、4号机组试运时就经常发生伺服阀卡涩,移交生产后首阳山电厂对油质就非常重视,1996年成立了滤油班加强滤油管理,提高油质清洁度。
伺服阀卡涩频率比试运时降低了许多,但次数还比较多。
日立《汽轮机维护手册》标明,伺服阀可在等于或低于NASl638第7级污染程度的油质中良好工作。
二期油系统管路设计为套管形式,滤网后向伺服阀供油的控制油管位于润滑油回油管中无法取样监测,只能监视润滑油的清洁度。
根据旧的《电厂用运行中汽轮机油质量标准》[2]中对油中机械杂质的要求是外观目视无杂质,1996年至今,每周化验3、4号机润滑油,油样透明、无杂质(有一段时间含少量水分,极少检查有杂质)。
新的《电厂用运行中汽轮机油质量标准》[3]除要求外观目视油中无机械杂质外,对油质提出了更高要求:250MW及以上机组要求测试颗粒度,参考国外标准极限值NASl638规定8-9级或MOOG规定6级;有的300MW汽轮机润滑系统和调速系统共用一个油箱,也用矿物汽轮机油,此时油中颗粒度指标应按制造厂提供的指标,测试周期为每6个月1次。
2001年对3、4号机组汽轮机油取样讲行颗粒度分析,运行油颗粒度均合格(见表1)。
伺服阀卡涩引起停机,对机组安全性影响非常大,且伺服阀卡涩引起机组非计划停运影响电厂的经济性。
首阳山电厂采取了以下临时措施:(1)定期更换伺服阀,超过3个月后遇到机组停机进行更换;(2)定期切换控制油滤芯,并对其清洗;(3)滤油机连续运行时提高油质清洁度;(4)加强油质检验。
从运行看,因伺服阀卡涩引起停机次数有所减少。
但尚无从根本上解决问题,为此经分析、研究提出一系列改造设想,如“采用独立的控制油源”、“不停机更换伺服阀”等,但由于系统改造量大、改造费用高或技术上不可行而均放弃。
经多方分析、调研,提出将伺服阀改型,选用抗污染性能较强的DDV阀的方案。
二、Abex415型电液伺服阀2.1 工作原理电液伺服阀是电液转换元件,又是功率放大元件,它把微小的电气信号转换成大功率的液压能输出,控制调速汽门的阀位。
它的性能优劣对电液调节系统影响很大,是电液调节系统的核心和关键。
该伺服阀为射流管式力反馈二级电液伺服阀,为四通阀门,其作用是控制进出液压系统的油量,使其与输入的电信号成比例,主要由阀体、转距电动机(线圈、电枢)、永久性磁铁、第1级射流管、压力反馈弹簧、第2级滑阀、“O”形环、外壳等组成(见图1)。
其工作原理:少量液压油从油源流经滤网,然后流经连接在力矩马达转子上的软管,最后从喷油嘴流出。
从喷嘴出来的油喷到2根集油管上,2根油管分别连于滑阀的两端。
无偏移时,每个集油管产生约二分之一的管道压力,因而无差压产生,所以滑阀平衡。
电流流过力矩马达时即产生一定力矩,使力矩马达的转子转动一个小角度。
若转子为反时针转动,则喷油管向右移动,引起更多的油喷到右边的集油管上,即产生压力,而左边集油管产生较小的压力。
这样滑阀上出现压差,引起滑阀向左移动。
滑阀一直向左移动直到回位弹簧产生的反力与力矩马达产生的力相等为止。
这时滑阀处于一新的平衡位置。
第2级电流成正比。
如电流极性相反,则滑阀移到另一侧。
2.2 主要特点(1)该阀为射流管式力反馈二级放大电液伺服阀;(2)低滞环,高分辨率;(3)灵敏度高,线性好且控制精度高;(4)控制油采用润滑油同一油源即主油箱内的N32号防锈汽轮机油,对油质要求高且抗污染能力差。
2.3 主要技术规范伺服阀的型号、参数见表2。
三、DDV伺服阀技术介绍3.1 工作原理DDV伺服阀由集成块电子线路、直线马达、阀芯、阀套等几部分构成(见图2)。
其工作原理为:一个电指令信号施加到阀芯位置控制器集成块上,电子线路在直线马达产生一个脉宽调制(PWM)电流,震荡器使阀芯位置传感器(LVDT)励磁。
经解调后的阀芯位置信号和指令位置信号进行比较,阀芯位置控制器产生一个电流输出给力矩马达,力矩马达驱动阀芯,一直使阀芯移动到指令位置。
阀芯的位置与指令信号大小成正比。
伺服阀的实际流量Q是阀芯位置与通过阀芯计量边的压力降的函数。
永磁直线马达结构见图3。
其工作原理:直线马达是一个永磁的差动马达,永磁提供部分所需的磁力,直线马达所需的电流明显低于同量级的比例电磁线圈所需的电流。
直线马达具有中性的中位,因为它一偏离中位就会产生力和行程,力和行程与电流成正比,,自线马达在向外伸出的过程巾必须克服高刚度弹簧所产生的对中力与外部的附加力(即液动力及由污染引起的摩擦力)。
在直线马达返回中位时,对中弹簧力是和马达产生的力同方向的,等于给阀芯提供了附加的驱动力,因此使DDV伺服阀对污染的敏感性大为降低。
直线马达借助对,卜弹簧回中,不需外加电流。
停电、电缆损坏或紧急停机情况下,伺服阀均能自行回中,无需外力推动。
3.2 主要特点DDV阀是MOOG公司最新研制成功的新型电液伺服阀,目前已由MOOGGmbH(德国)公司进行批量生产。
它是一种直接驱动式伺服阀,用集成电路实现阀芯位置的闭环控制。
阀芯的驱动装置是永磁直线力马达,对中弹簧使阀芯保持在中位,直线力马达克服弹簧的对中力使阀芯在2个方向都可偏离中位,平衡在一个新的位置,这样就解决了比例电磁线圈只能在一个方向产:生力的不足之处。
阀芯位置闭环控制电子线路与脉宽调制(PWM)驱动电子线路固化为一块集成块,用特殊的连接技术固定在伺服阀内,因此该伺服阀无需配套电子装置就能对其进行控制。
DDV阀与“射流管式伺服阀”(或“双喷嘴力反馈两级伺服阀”)相比,其最大特点是:(1)无液压前置级;(2)用大功率的直线力马达替代丁小功率的力矩马达;(3)用先进的集成块与微型位置传感器替代了工艺复杂的机械反馈装置一力反馈杆与弹簧管;(4)低的滞环,高的分辨率;(5)保持了带前置级的两级伺服阀的基本性能与技术指标;(6)对控制油质抗污染能力大大提高;(7)降低运行维护成本。
3.3 主要技术参数DDV伺服阀的型号、参数(D633系列)见表3。
四、技术改造方案及设备安装调试通过技术改造实现的目标:(1)彻底解决伺服阀卡涩;(2)不改变调节系统的调节特性;(3)具有高的可靠性、安全性;(4)改造量小。
改造方案:(1)将汽轮机的CV、左右侧ICV伺服阀均改为DDV型伺服阀。
(2)机械方面:因2种伺服阀形状、开孔尺寸及安装尺寸不同,在伺服阀与执行器间加装连接用的油路集成块,并在集成块上安装进油滤网。
(3)热工方面:安装电源及信号转换箱,接受HITASS的D-EHG控制信号(±8mA)和2路220V交流电源(一路UPS,一路保安段),将控制信号(±8mA)变为电压信号(±10V)作为DDV的控制信号,交流220V 转换为直流24V作为DDV的电源。
通过静止试验表明,调节系统静态特性达到与改型前试验数值基本一致,表明伺服阀改为DDV阀后,整个控制系统调节方法、调节性能无变化。
改型前后静态试验数据见表4、5。
为检验伺服阀改为DDV阀后是否安全,能否保证失电状况下执行器关闭,进行了失电试验:加一开启信号,执行器开启;就地拔去信号接头,执行器自行关闭。
五、运行实践及经济分析4号机组自2001年9月运行至今,机组启停多次,调节系统可靠稳定,没有发生一次因伺服阀卡涩而造成机组的非计划停运。
技术改造后对机组安全、经济方面的影响。
安全性:避免了伺服阀卡涩,极大地提高了机组的安全性、可靠性且机组非计划停运次数大大减少;经济性:技术改造除增加发电量外,每年约可节约费用74万元。
技术改造费为每台机20万元,2台机组共40万元。
1台机组1年就可收回2台机组的全部投资,经济效益显著。
六、结论实际运行情况表明:该项技术改造在于汽轮机电液控制系统与润滑油系统同用一个油源,提高了适用性及抗污染能力,解决了电液伺服阀卡涩问题,大大减少了机组非计划停运次数,有明显的经济效益。
可在同类日立00MW汽轮机的电液控制系统推广、实施。
目前国内机组电液控制系统工作液采用磷酸酯抗燃油的较多,而磷酸酯抗燃油与透平油相比理化性能要求严格、价格昂贵且维护复杂,尤其是磷酸酯抗燃油废液目前不能处理,其污染等同核污染,对人体健康有一定的危害。
考虑到这些因素,机组电液控制系统工作液由抗燃油向汽轮机油系统发展是大趋势。
虽然DDV阀对油质污染的敏感性大为降低,但油质清洁度下降,会降低伺服阀计量边使用寿命,所以加强油质化学监督一点也不能放松。
同时建议机组进行一次甩负荷试验,以进一步检验DDV阀的甩负荷特性。