基于局部抠像技术的融合图像精确跟踪算法_程昱宇
基于图像处理的实时目标跟踪技术研究

基于图像处理的实时目标跟踪技术研究随着科技的不断发展,图像处理技术已经被广泛应用到了各行各业。
其中,基于图像处理的实时目标跟踪技术是一个非常重要的技术领域。
它可以应用于人工智能、自动驾驶、智能机器人等众多领域,优化工业制造和生活方式,提升人们的生活质量。
本文将从基本原理、技术革新和未来应用三个角度,对该技术进行探讨。
一、基本原理基于图像处理的实时目标跟踪技术是建立在图像分析和计算机视觉技术的基础之上的。
它利用计算机对传感器采集到的图像进行处理,抽取出其中的特征信息,并通过不断的匹配、追踪,实现对目标的跟踪。
目标跟踪算法通常分为以下四个步骤。
第一步是目标检测。
通过特征抽取技术,根据目标的特征和外形信息,快速准确地找到图像中的目标物体。
第二步是轨迹预测。
通过对目标轨迹的统计学分析,预测目标下一步的运动方向和速度等信息。
第三步是目标跟踪。
通过运用不同的算法模型对目标进行跟踪,并在跟踪过程中不断更新目标的信息。
第四步是目标识别。
通过利用深度学习等技术,实现对目标进行识别,区分不同目标。
这四个步骤相互衔接,构成了图像处理的实时目标跟踪技术。
二、技术革新在技术革新方面,研究人员提出了许多新的方法和技术,不断改进了目标跟踪技术的性能和精度。
以下是一些重要的技术创新。
1、深度学习深度学习是实现目标识别的一种重要方法。
通过构建深度神经网络,可以实现对目标进行分类和识别。
在目标跟踪中,深度学习可以借助卷积神经网络(CNN)和循环神经网络(RNN)等模型,对目标进行跟踪和识别。
2、图像分割图像分割是指将一张图像分成若干互不重叠的子区域,每个子区域代表一个物体或一部分物体。
在目标跟踪中,图像分割可以使跟踪器更好地区分目标和背景,提高跟踪精度。
3、多跟踪器融合多跟踪器融合是指同时使用多个跟踪器,通过融合它们的输出结果,提高跟踪精度。
当前,许多跟踪算法都已经采用了多跟踪器融合的技术。
4、在线学习在线学习是指在实时目标跟踪过程中,不断从新的数据中学习知识。
超分辨率重建的微小人脸识别算法
超分辨率重建的微小人脸识别算法作者:李靖宇,程卫月,李子翔,林克正来源:《哈尔滨理工大学学报》2022年第03期摘要:針对低分辨率下小尺度人脸图像缺失有效身份信息导致的识别率低的问题,提出了超分辨率重建的微小人脸识别算法。
该算法首先将采集到的低分辨率人脸图像进行超分辨率重建,并采用细节增强的方法,以恢复图像的面部轮廓信息与纹理细节等高频信息,再通过一个改进的密集连接网络做特征提取,进行图像识别。
实验结果表明,该方法对于小尺度的人脸图像,在图像识别率上优于其它人脸识别算法,能够有效解决现实环境中微小人脸识别率低的问题。
关键词:超分辨率重建;人脸识别;特征提取;细节增强DOI:10.15938/j.jhust.2022.03.007中图分类号: TP391.4文献标志码: A文章编号: 1007-2683(2022)03-0052-07Small Face Recognition Algorithm Basedon Super-resolution ReconstructionLI Jing-yu1,CHENG Wei-yue2,LI Zi-xiang1,LIN Ke-zheng1(1.School of Computer Science and Technology, Harbin University of Science and Technology, Harbin 150080,China;2.Heilongjiang College of Business and Technology, Harbin 150025, China)Abstract:Aiming at the problem of low recognition rate caused by the lack of effective identity information in small-scale face images with low resolution, this small face recognition algorithm based on super-resolution reconstruction is proposed. The algorithm first performs super-resolution reconstruction on the collected low-resolution face images, and uses the method of detail enhancement to restore high-frequency information such as facial contour information and texture details of the image, and then uses an improved densely connected network to do feature extraction and image recognition. Experimental results show that this method is aimed at small-scale face images, and is superior to other face recognition algorithms in image recognition rate, and can effectively solve the problem of low recognition rate of small faces in real environments.Keywords:super-resolution reconstruction; face recognition; feature extraction; detail enhancement0引言随着人工智能与深度学习的发展,人脸识别技术已日渐成熟,越来越多的应用于人们的日常生活中,包括人脸识别门禁、智能安防系统、人脸识别考勤等领域。
基于激光点云数据的单木骨架三维重构浔

第40卷第1期2024年1月森㊀林㊀工㊀程FOREST ENGINEERINGVol.40No.1Jan.,2024doi:10.3969/j.issn.1006-8023.2024.01.015基于激光点云数据的单木骨架三维重构赵永辉,刘雪妍,吕勇,万晓玉,窦胡元,刘淑玉∗(东北林业大学计算机与控制工程学院,哈尔滨150040)摘㊀要:针对树木三维重构过程中面临的处理速度慢㊁重构精度低等问题,提出一种采用激光点云数据的单木骨架三维重构方法㊂首先,根据点云数据类型确定组合滤波方式,以去除离群点和地面点;其次,采用一种基于内部形态描述子(ISS )和相干点漂移算法(CPD )的混合配准算法(Intrinsic Shape -Coherent Point Drift ,IS -CPD ),以获取单棵树木的完整点云数据;最后,采用Laplace 收缩点集和拓扑细化相结合的方法提取骨架,并通过柱体构建枝干模型,实现骨架三维重构㊂试验结果表明,相比传统CPD 算法,研究设计的配准方案精度和执行速度分别提高50%和95.8%,最终重构误差不超过2.48%㊂研究结果证明可有效地重构单棵树木的三维骨架,效果接近树木原型,为构建林木数字孪生环境和林业资源管理提供参考㊂关键词:激光雷达;树木点云;关键点提取;树木骨架;几何模型中图分类号:S792.95;TN958.98㊀㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1006-8023(2024)01-0128-073D Reconstruction of Single Wood Skeleton Based on Laser Point Cloud DataZHAO Yonghui,LIU Xueyan,LYU Yong,WAN Xiaoyu,DOU Huyuan,LIU Shuyu ∗(College of Computer and Control Engineering,Northeast Forestry University,Harbin 150040,China)Abstract :In response to the slow processing speed and low reconstruction accuracy encountered during the 3D reconstruction of trees,a method for 3D reconstruction of single -tree skeletons using laser point cloud data is proposed.Firstly,a combination filtering method is determined based on the point cloud data type to remove outliers and ground points.Secondly,a hybrid registration algorithm based on ISS (Intrinsic Shape Descriptor)and CPD (Coherent Point Drift algorithm),called IS -CPD (Intrinsic Shape -Coherent Point Drift),is employed to obtain complete point cloud data for individual trees.Finally,a method combining Laplace contraction of point sets and topological refinement is used to obtain the skeleton,and branch models are constructed using cylinders to achieve 3D skeleton reconstruction.Experimental results show that compared to traditional CPD algorithm,the proposed registration scheme im-proves accuracy and execution speed by 50%and 95.8%respectively,with a final reconstruction error of no more than 2.48%.The research demonstrates the effective reconstruction of the 3D skeleton of individual trees,with results close to the original trees,provi-ding a reference for building digital twin environments of forest trees and forestry resource management.Keywords :LiDAR;tree point cloud;key point extraction;tree skeleton;geometry model收稿日期:2023-02-10基金项目:国家自然科学基金(31700643)㊂第一作者简介:赵永辉,硕士,工程师㊂研究方向为物联网与人工智能㊂E-mail:hero9968@∗通信作者:刘淑玉,硕士,讲师㊂研究方向为通信与信号处理㊂E -mail:1000002605@引文格式:赵永辉,刘雪妍,吕勇,等.基于激光点云数据的单木骨架三维重构[J].森林工程,2024,40(1):128-134.ZHAO Y H,LIU X Y,LYU Y,et al.3D reconstruction of sin-gle wood skeleton based on laser point cloud data[J].Forest En-gineering,2024,40(1):128-134.0㊀引言激光雷达可用于获取目标稠密点云数据,是实现自动驾驶和三维重建的重要手段㊂使用机载或地基激光雷达可以获取树高㊁胸径和冠层等量化信息,用于树木的三维重建,为推断树木的生态结构参数和碳储量反演提供依据,也可为林业数字孪生提供数据支撑㊂主流的点云数据去噪方法主要有基于密度㊁基于聚类和基于统计3种[1]㊂分离地面点和非地面点是点云数据处理的第一步,学者提出多种算法用于地面点分离㊂然而,即使是最先进的滤波算法,也需要设置许多复杂的参数才能实现㊂Zhang 等[2]提出了一种新颖的布料模拟滤波算法(Cloth Simu-lation Filter,CSF),该算法只需调整几个参数即可实现地面点的过滤,但该算法对于点云噪声非常敏感㊂在点云配准方面,经典的算法是Besl 等[3]提出的迭代最近点算法(Iterative Closest Point,ICP),但易出现局部最优解,从而限制了该算法的应用㊂因此,许多学者采用概率统计方法进行点云配准,典型的方法是相干点漂移算法(Coherent Point Drift,CPD)[4-5]等,但该方法存在运行时间长和计算复杂的问题㊂石珣等[6]结合曲率特征与CPD 提出了一第1期赵永辉,等:基于激光点云数据的单木骨架三维重构种快速配准方法,速度大大提高,但细节精确度有所下降㊂陆军等[7]㊁夏坎强[8]㊁史丰博等[9]对基于关键点特征匹配的点云配准方法进行了深入研究㊂三维树木几何重建从传统的基于规则㊁草图和影像重建,发展到如今借助激光雷达技术,可以构建拓扑正确的三维树木几何形态㊂翟晓晓等[10]以点云数据进行树木重建,由于受激光雷达视场角的约束,难以获得树冠结构的信息,因此仅重建了树干㊂Lin 等[11]㊁You 等[12]涉及点云骨架提取的研究,构建了树的几何和拓扑结构,但重构模型的真实感不够强㊂Cao 等[13]使用基于Laplace 算子的建模方法提取主要枝干的几何信息,拓扑连接正确,并保留了部分细枝㊂曹伟等[14]对点云树木建模的发展和前景进行了综述,但在结合点云数据提取骨架并重建等方面研究不足㊂本研究提出一种基于骨架的方法,旨在准确地从单木的点云数据中重建三维模型㊂原始点云数据经过CSF 算法和K 维树(Kd -Tree)近邻搜素法的组合滤波后,提取了准确的单木数据㊂同时,基于树木特征点云的混合配准算法(Intrinsic Shape -Co-herent Point Drift,IS -CPD),可显著提高配准效率㊂最后,通过提取单棵树木的骨架点,构造连接性,并用圆柱拟合枝干,实现了单木的三维建模㊂1㊀数据采集及预处理1.1㊀数据获取数据采集自山东省潍坊市奎文区植物园内一株高约8.5m㊁树龄约20a 的银杏树㊂使用Ro-boSense 雷达从2个不同角度进行点云数据采集,雷达高为1.5m,与树木水平距离约为10m㊂通过对来自树木正东方向和正北方向的2组点云数据进行采集,如图1所示㊂(a )角度1点云数据(正东方向)(a )Angle 1 point cloud data (East direction )(b )角度2点云数据(正北方向)(b )Angle 2 point cloud data (North direction)图1㊀2组点云的最初扫描结果Fig.1Initial scan results of two sets of point clouds1.2㊀点云预处理为了提高后续处理点云数据的准确性和时效性,需要对数据进行预处理㊂首先,利用CSF 滤波算法去除冗余的地面背景信息,该算法参数较少,分离速度快㊂通过使用落在重力下的布来获取地形的物理表示,单木点云可以被分离出来㊂由于扫描环境和激光雷达硬件误差的影响,可能会出现离群点㊂因此,采用Kd -Tree 算法对提取的点云进行降噪处理,提高单个树木数据的精度,以备在后续的算法使用中得到更准确的结果㊂通过搜索待滤波点云p i (x i ,y i ,z i )中每个点的空间邻近点p j (x j ,y j ,z j ),计算之间的平均距离(d i )㊁全局均值(μ)以及标准差(σ)㊂筛选符合范围(μ-αˑσɤd i ɤμ+αˑσ)的点并过滤掉离群值(α为决定点云空间分布的参数),d i ㊁μ㊁σ的计算公式如下㊂d i =ðkj =1x i -y j k μ=ðn i =1d i n σ=ðni =1(d i -μ)2n ìîíïïïïïïïïïïïï㊂(1)921森㊀林㊀工㊀程第40卷式中:k 为决定点云密集度的参数;n 为点云数量㊂通过试验发现,最终选定参数k =20,α=1.2时,对点云数据进行处理结果最优,滤噪结果如图2所示,基本去除了离群噪声点和地面点同时又确保对点云模型轮廓的保护㊂2㊀单木骨架重构方法单木骨架重构方法的过程主要包括以下几个步骤,如图3所示㊂首先,对预处理的2组点云数据进行特征提取,并进行精确的配准;其次,对点云进行几何收缩,获取零体积点集,并通过拓扑细化将点集细化成一维曲线,得到与点云模型基本吻合的骨架线;最后,基于骨架线对树木枝干进行圆柱拟合,以构建枝干的三维模型㊂图2㊀2组点云滤噪结果图Fig.2Two sets of point cloud filtering and denoisingresults图3㊀单木骨架重构方法过程图Fig.3Process diagram of single wood skeleton reconstruction method2.1㊀三维点云配准CPD 配准是一种基于概率的点集配准算法,在对点集进行配准时,一组点集作为高斯混合模型(Gaussian Mixture Model,GMM)的质心,假设模板点集坐标为X M ˑD =(y 1,y 2, ,y M )T ,另一组点集作为混合高斯模型的数据集,假设目标点集坐标为X N ˑD =(x 1,x 2, ,x N )T ,N ㊁M 分别代表2组点的数目,D 为Z 组的维度,T 为矩阵转置㊂通过GMM 的最大后验概率得到点集之间的匹配对应关系㊂GMM 概率密度函数如下㊂p (x )=ω1N +(1-ω)ðMm =11M p (x m )㊂(2)式中:p x |m ()=1(2πσ2)D 2exp (-x -y m 22σ2),;p (x )是概率密度函数;ω(0ɤωɤ1)为溢出点的权重参数;m 为1 M 中的任何一个数㊂GMM 质心的位置通过调整变换参数(θ)的值进行改变,而变换参数的值可以通过最小化-log 函数来求解㊂E θ,σ2()=-ðN n -1log ðMm -1p (m )p (x n |m )㊂(3)式中,x n 与y m 之间的匹配关系可以由GMM 质心的后验概率p (m x n )=p (m )p (x n m )来定义㊂采用期望最大值算法进行迭代循环,从而对最大似然估计进行优化,当收敛时迭代停止㊂得到θ和σ2的解,即完成模板网格点集向目标网格点集的配准㊂扫描设备采集的点云数据通常数量庞大,因此并非所有点云信息都对配准有效㊂此外,CPD 算法的计算复杂度较高,匹配速度较慢㊂因此,本研究采用ISS(Intrinsic Shape Signaturs)算法[15]提取关键点,以降低几何信息不显著点的数量㊂通过对这些特征点进行精确配准,可以提高点云配准的效率㊂图4给出了IS -CPD 配准过程㊂31第1期赵永辉,等:基于激光点云数据的单木骨架三维重构图4㊀基于特征点提取的配准过程图Fig.4Registration process diagram based on feature point extraction ㊀㊀IS-CPD点云配准算法流程如下㊂(1)选择2个视角点云重叠区域㊂(2)采用ISS算法提取特征点集㊂设点云数据有n个点,(x i,y i,z i),i=0,1, ,n-1㊂记P i=(x i,y i,z i)㊂①针对输入点云的每个点构建一个半径为r的球形邻域,并根据式(4)计算每个点的权重㊂W ij=1||p i-p j||,|p i-p j|<r㊂(4)②根据式(5)计算各点的协方差矩阵cov及其特征值{λ1i,λ2i,λ3i},并按从小到大的次序进行排列㊂cov(p i)=ð|p i-p j|<r w ij(P i-P j)(P i-P j)Tð|P i-P j|<r w ij㊂(5)③设置阈值ε1与ε2,满足λ1iλ2i ≪ε1㊁λ2iλ3i≪ε2的点即为关键点㊂(3)初始化CPD算法参数㊂(4)求出相关概率矩阵与后验概率p(m|x n)㊂(5)利用最小负对数似然函数求出各参数的值㊂(6)判断p的收敛性,若不收敛,则重复步骤(4)直到收敛㊂(7)在点集数据中,利用所得到的转换矩阵,完成配准㊂2.2㊀点云枝干重建传统的构建枝干的方法是直接在点云表面上进行重构,这种方法会导致大量畸变结构㊂因此,本研究先提取单木骨架线,再通过拟合圆柱来构建几何模型㊂图5为骨架提取并重建枝干的过程㊂为精确提取树干和树枝,采用Laplace收缩法提取骨架㊂首先,对点云模型进行顶点邻域三角化,得到顶点的单环邻域关系㊂然后,计算相应的余切形式的拉普拉斯矩阵,并以此为依据收缩点云,直至模型收缩比例占初始体积的1%,再通过拓扑细化将点集细化成一维曲线㊂采用最远距离点球对收缩点进行采样,利用一环邻域相关性将采样点连接成初始骨架,折叠不必要的边,直到不存在三角形,得到与点云模型基本吻合的骨架线㊂为准确地模拟树枝的几何形状,采用圆柱拟合方法㊂在树基区域,使用优化方法来获得主干的几何结构[16]㊂由于靠近树冠和树枝尖端的小树枝的点云数据较为杂乱,使用树木异速生长理论来控制枝干半径㊂最终,拟合圆柱体来得到树木点云的3D 几何模型[17],原理如图6所示㊂以粗度R为半径,以上端点M和下端点N为圆心生成多个圆截面,并沿着骨架线连接圆周点绘制出圆柱体,以此代表每个树枝,最终完成整棵树的枝干的绘制㊂131森㊀林㊀工㊀程第40卷图5㊀构建枝干模型流程图Fig.5Flow chart for building branch model(a)圆柱模型示例(a)Example of a cylindrical model(b)绘制局部树枝示例(b)Example of drawing a partial tree branchNMR图6㊀绘制树干几何形状原理Fig.6Principle of drawing tree trunk geometry3㊀试验结果与分析3.1㊀点云配准结果与分析为验证IS-CPD配准算法的有效性,对滤波后的点云进行试验,比较该算法与原始CPD算法及石珣等[6]提出的方法在同一数据下的运行时间及均方根误差(RMSE,式中记为R MSE),其表达式见式(6),值越小表示配准效果越精确㊂图7及表1给出了3种配准算法的对比结果㊂R MSE=㊀ðn i-1(x i-x︿i)2n㊂(6)式中:n为点云数量;x i和x︿i分别为配准前后对应点之间欧氏距离㊂经过配准结果图7和表1的分析,石珣等[5]算法虽提高了配准速度,但其细节精度下降,配准结果不佳㊂相比之下,CPD和IS-CPD算法均能成功地融合2个不同角度的点云,达到毫米级的精度,2种方法可视为效果近乎一致㊂相比之下,本研究算法的时间复杂度要小得多㊂此外,由表2可知,配准时间缩短至10.77s,平均配准精度相较CPD提高了约50%㊂3.2㊀点云枝干重建结果与分析在几何重建部分(图8),采用基于Laplace收缩的骨架提取方法,仅需不到5次迭代,就可以将点收缩到较好的位置,如图8(b)所示㊂对收缩后的零体231第1期赵永辉,等:基于激光点云数据的单木骨架三维重构图7㊀点云配准可视化对比Fig.7Point cloud registration visualization comparison表1㊀点云配准结果对比Tab.1Comparison of point cloud registration results配准算法Registration algorithm 点云总数/个Total number of point clouds角度1Angle 1角度2Angle 2历时/s Time 均方根误差/mRMSE CPD石珣等[6]Shi xun et al [6]本算法Proposed algorithm3795637647261.748.3ˑ10-386.58 1.6ˑ10-210.774.1ˑ10-3㊀㊀注:IS -CPD 算法提取关键点所需的时间可以忽略不计㊂Note:The time required for the IS -CPD algorithm to extract key points can beignored.积点集进行拓扑细化,得到与点云模型基本吻合的骨架线,如图8(c)所示㊂随后,对枝干进行圆柱拟合㊂至此,树木点云重建工作全部完成㊂图8(d)为树木骨架几何重建的最终结果㊂本研究使用单棵树木的树高和胸径作为重建模型的精度评价指标㊂首先,采用树干点拟合圆柱的方法来将点云投影至圆柱轴向方向,通过求取该轴向投影的最大值和最小值来获取树高信息㊂同时,(a )输入点云(a )Input point cloud(b )点云收缩(b )Point cloud shrinkage (c )连接骨架线(c )Connecting skeleton lines(d )树木点云的几何模型(d )Geometric model of treepoint cloud图8㊀单木几何重建过程Fig.8Single wood geometry reconstruction process在Pitkanen 等[18]研究方法的基础上,对树干点云进行分层切片处理,将二维平面上的分层点云进行投影,再通过圆拟合方法得到更为精确的胸径尺寸㊂为验证该算法重建模型的准确性,进行20次试验,并将其与Nurunnabi 等[16]的重建方法进行了比较㊂表2为2种方法分别获得的树高和胸径的平均值,并将其与真实测量值进行了对比㊂结果表明,该算法相较于Nurunnabi 等[16]的重建方法具有更高的精度,胸径平均误差仅为2.48%,树高平均误差仅为1.64%㊂表2㊀树木重构精度分析Tab.2Tree reconstruction accuracy analysis评估方法Evaluation method胸径/m DBH 树高/m Height 平均误差(%)Average error胸径DBH 树高Height Nurunnabi 等[16]Nurunnabi et al [16]2.13ˑ10-18.26 5.973.17本算法Proposed algorithm1.96ˑ10-18.392.48 1.64实测值Measured value2.01ˑ10-18.53331森㊀林㊀工㊀程第40卷4㊀结论本研究讨论了激光雷达重建单棵树木的流程,分析并改进了关键问题㊂充分发挥CSF滤波和Kd-Tree算法的优势,从而精准地分离出了单棵树木的数据,提高了处理速度㊂提出IS-CPD配准算法,可将点云配准的效率提高约95.8%㊂通过精确配准后的点云数据,成功提取骨架树,最终重构误差控制在2.48%以内㊂试验结果表明,研究方法在树木点云数据滤波㊁配准和骨架提取方面具有可行性,树木枝干结构重建效果良好,且重构模型可为评估农林作物㊁森林生态结构健康等提供支持㊂ʌ参㊀考㊀文㊀献ɔ[1]鲁冬冬,邹进贵.三维激光点云的降噪算法对比研究[J].测绘通报,2019(S2):102-105.LU D D,ZOU J parative research on denoising al-gorithms of3D laser point cloud[J].Survey and Mapping Bulletin,2019(S2):102-105.[2]ZHANG W,QI J,WAN P,et al.An easy-to-use air-borne LiDAR data filtering method based on cloth simula-tion[J].Remote Sensing,2016,8(6):501. [3]BESL P J,MCKAY H D.A method for registration of3-D shapes[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256. [4]MYRONENKO A,SONG X.Point set registration:coherent point drift[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(12):2262-2275. [5]王爱丽,张宇枭,吴海滨,等.基于集成卷积神经网络的LiDAR数据分类[J].哈尔滨理工大学学报,2021, 26(4):138-145WANG A L,ZHANG Y X,WU H B,et al.LiDAR data classification based on ensembled convolutional neural net-works[J].Journal of Harbin University of Science and Technology,2021,26(4):138-145.[6]石珣,任洁,任小康.等.基于曲率特征的漂移配准方法[J].激光与光电子学进展,2018,55(8):248-254. SHI X,REN J,REN X K,et al.Drift registration based on curvature characteristics[J].Laser&Optoelectronics Progress,2018,55(8):248-254.[7]陆军,邵红旭,王伟.等.基于关键点特征匹配的点云配准方法[J].北京理工大学学报,2020,40(4):409-415. LU J,SHAO H X,WANG W,et al.Point cloud registra-tion method based on key point extraction with small over-lap[J].Transactions of Beijing Institute of Technology, 2020,40(4):409-415.[8]夏坎强.基于ISS特征点和改进描述子的点云配准算法研究[J].软件工程,2022,25(1):1-5.XIA K Q.Research on point cloud algorithm based on ISS feature points and improved descriptor[J].Software Engi-neering,2022,25(1):1-5.[9]史丰博,曹琴,魏军.等.基于特征点的曲面点云配准方法[J].北京测绘,2022,36(10):1345-1349.SHI F B,CAO Q,WEI J,et al.Surface point cloud reg-istration method based on feature points[J].Beijing Sur-veying and Mapping,2022,36(10):1345-1349. [10]翟晓晓,邵杰,张吴明.等.基于移动LiDAR点云的树木三维重建[J].中国农业信息,2019,31(5):84-89.ZHAI X X,SHAO J,ZHANG W M,et al.Three-di-mensional reconstruction of trees using mobile laser scan-ning point cloud[J].China Agricultural Information,2019,31(5):84-89.[11]LIN G,TANG Y,ZOU X,et al.Three-dimensional re-construction of guava fruits and branches using instancesegmentation and geometry analysis[J].Computers andElectronics in Agriculture,2021,184:106107. [12]YOU A,GRIMM C,SILWAL A,et al.Semantics-guided skeletonization of upright fruiting offshoot trees forrobotic pruning[J].Computers and Electronics in Agri-culture,2022,192:106622.[13]CAO J J,TAGLIASACCJI A,OLSON M,et al.Pointcloud skeletons via Laplacian based contraction[C]//Proceedings of the Shape Modeling International Confer-ence.Los Alamitos:IEEE Computer Society Press,2010:187-197.[14]曹伟,陈动,史玉峰.等.激光雷达点云树木建模研究进展与展望[J].武汉大学学报(信息科学版),2021,46(2):203-220.CAO W,CHEN D,SHI Y F,et al.Progress and pros-pect of LiDAR point clouds to3D tree models[J].Geo-matics and Information Science of Wuhan University,2021,46(2):203-220.[15]YU Z.Intrinsic shape signatures:A shape descriptor for3D object recognition[C]//IEEE International Confer-ence on Computer Vision Workshops.IEEE,2010. [16]NURUNNABI A,SADAHIRO Y,LINDENBERGH R,etal.Robust cylinder fitting in laser scanning point clouddata[J].Measurement,2019,138:632-651. [17]GUO J W,XU S B,YAN D M,et al.Realistic proce-dural plant modeling from multiple view images[J].IEEE Transactions on Visualization and Computer Graph-ics,2020,26(2):1372-1384.[18]PITKANEN T P,RAUMONEN P,KANGAS A.Measur-ing stem diameters with TLS in boreal forests by comple-mentary fitting procedure[J].ISPRS Journal of Photo-grammetry and Remote Sensing,2019,147:294-306.431。
基于局部信息的图像检索方法[发明专利]
![基于局部信息的图像检索方法[发明专利]](https://img.taocdn.com/s3/m/cd5fba0de009581b6ad9eb05.png)
专利名称:基于局部信息的图像检索方法专利类型:发明专利
发明人:程飞
申请号:CN201910937048.8
申请日:20190929
公开号:CN110633387A
公开日:
20191231
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于局部信息的图像检索方法,包括:获取若干原始图像;分别将各原始图像划分为多个图像区域,并提取各图像区域的局部特征向量;分别为各原始图像生成一个图像ID;分别将各原始图像的图像ID和局部特征向量进行关联;利用所述原始图像的图像ID以及局部特征向量构建图像索引;获取查询图像;计算查询图像与图像索引中每幅原始图像的全图相似度,并根据全图相似度生成检索结果列表。
本发明中将图像划分为多个图像区域,分别计算各个图像区域的局部相似度,然后根据局部相似度计算得到全图相似度,提高了检索结果的准确性。
申请人:四川乐为科技有限公司
地址:610000 四川省成都市高新区益州大道中段1800号1栋9层901号
国籍:CN
代理机构:成都厚为专利代理事务所(普通合伙)
代理人:幸凯
更多信息请下载全文后查看。
视频内容分析中的关键帧提取与跟踪技术综述

视频内容分析中的关键帧提取与跟踪技术综述随着数字媒体技术的快速发展,视频内容分析成为了计算机视觉和人工智能领域中的研究热点之一。
视频内容分析的一个重要任务是提取并跟踪视频中的关键帧。
关键帧是视频中具有重要信息的帧,通过提取关键帧可以有效地减少视频数据量,提高视频内容的表达效果。
本文将对视频内容分析中的关键帧提取与跟踪技术进行综述。
关键帧提取是视频内容分析的一项基础任务,其主要目标是从视频序列中选择一些具有代表性和信息丰富度的帧。
在关键帧提取中,常用的方法有基于图像质量评价、基于运动分析和基于帧间相似度的方法。
基于图像质量评价的关键帧提取方法主要利用图像特征和质量评估算法来衡量帧的重要性。
其中,图像特征可以包括亮度、对比度、色彩饱和度等,质量评估算法可以是传统的像素差异度或者是深度学习模型。
这种方法主要适用于静态场景的视频内容分析。
基于运动分析的关键帧提取方法主要利用帧间的运动信息来确定关键帧。
常用的方法有基于光流和基于运动轨迹的方法。
光流法通过计算连续帧之间的像素位移来获得视频序列中物体的运动状态,根据像素位移的大小和方向可以确定运动帧。
运动轨迹法可以跟踪视频序列中的对象运动,根据运动轨迹的连续性和方向来选择关键帧。
基于帧间相似度的关键帧提取方法主要利用帧与帧之间的相似度来判断关键帧。
相似度可以通过计算帧之间的像素差异、颜色直方图匹配、感知哈希算法等来衡量。
相似度越高的帧被认为是关键帧。
此方法适用于动态场景的视频内容分析。
关键帧跟踪在关键帧提取的基础上,通过跟踪相邻帧之间的目标运动来实现。
关键帧跟踪是一种目标跟踪算法,其目标是通过连续帧图像中的目标检测和位置预测来追踪视频中的目标对象。
关键帧跟踪可以通过基于特征的方法、基于深度学习的方法和基于模型的方法来实现。
基于特征的关键帧跟踪方法主要利用目标对象的视觉特征,如颜色、纹理、形状等来完成目标跟踪。
常用的方法有卡尔曼滤波器和粒子滤波器。
基于深度学习的关键帧跟踪方法主要利用深度卷积神经网络(CNN)来提取目标对象的特征表示。
一种基于局部对比度加权平均的显微镜图像景深合成方法及系统[发明专利]
![一种基于局部对比度加权平均的显微镜图像景深合成方法及系统[发明专利]](https://img.taocdn.com/s3/m/4dfc9cc6af45b307e9719779.png)
专利名称:一种基于局部对比度加权平均的显微镜图像景深合成方法及系统
专利类型:发明专利
发明人:陈革,何成东,朱锋,赵福林,娄琪,汪大卫,聂佳,俞兴华,张国伟
申请号:CN202011551811.2
申请日:20201224
公开号:CN112734656A
公开日:
20210430
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于局部对比度加权平均的显微镜图像景深合成方法及系统,方法包括获取若干张不同景深的彩色的显微镜图像;将所有显微镜图像逐一进行灰度化得到对应的灰度图像;基于预设的邻域,对所有灰度图像中的每一锚点像素计算方差;取所有灰度图像相同位置的锚点像素的方差进行求和得到总方差;将所有显微镜图像中的每一锚点像素分解为RGB三通道值;基于每一锚点像素进行景深合成得到最终的景深合成图。
本发明在景深合成中细节保留充分,无重影,且对噪声具有较大的抑制作用。
申请人:中电海康集团有限公司
地址:311100 浙江省杭州市余杭区五常街道爱橙街198号
国籍:CN
代理机构:杭州君度专利代理事务所(特殊普通合伙)
代理人:杨天娇
更多信息请下载全文后查看。
一种视觉目标跟踪自适应的模板融合方法[发明专利]
![一种视觉目标跟踪自适应的模板融合方法[发明专利]](https://img.taocdn.com/s3/m/9cf29d61680203d8ce2f24f8.png)
专利名称:一种视觉目标跟踪自适应的模板融合方法专利类型:发明专利
发明人:胡静,康愫愫,沈宜帆,张旭阳,陈智勇
申请号:CN202010810873.4
申请日:20200812
公开号:CN111985375A
公开日:
20201124
专利内容由知识产权出版社提供
摘要:本发明公开了一种视觉目标跟踪自适应的模板融合方法,属于目标跟踪技术领域。
发明通过计算响应图的极值和均值比值,用于判断是否进行模板更新,由于过滤掉目标响应程度较弱的帧,避免将一些质量较差的帧用于模板更新,从而提高了模板的质量,以取得更好的跟踪效果。
本发明自适应计算模板融合系数,从计算公式中可知,与当前帧响应较强的模板会获得更大的更新权重,既进行了目标状态的更新,又减小了目标模糊、遮挡(此时与当前帧响应较弱,更新时的权重小)对模板的污染,对于视频数据的利用更加充分,有效抑制目标跟踪过程中的目标形变和背景对模板污染的问题,提高了跟踪过程中的模板质量。
申请人:华中科技大学
地址:430074 湖北省武汉市洪山区珞喻路1037号
国籍:CN
代理机构:华中科技大学专利中心
更多信息请下载全文后查看。
基于局部模型加权融合的Top-N电影推荐算法

基于局部模型加权融合的Top-N电影推荐算法
汤颖;孙康高;秦绪佳;周建美
【期刊名称】《计算机科学》
【年(卷),期】2018(045)0z2
【摘要】为了解决传统推荐算法使用单一模型无法准确捕获用户偏好的问题,将稀疏线性模型作为基本推荐模型,提出了基于用户聚类的局部模型加权融合算法来实现电影的Top-N个性化推荐.同时,为了实现用户聚类,文中利用LDA主题模型和电影的文本内容信息,提出了语义层次用户特征向量的计算方法,并基于此来实现用户聚类.在豆瓣网电影数据集上的实验验证结果表明,所提局部加权融合推荐算法提升了原始基模型的推荐效果,同时又优于一些传统的经典推荐算法,从而证明了该推荐算法的有效性.
【总页数】6页(P439-444)
【作者】汤颖;孙康高;秦绪佳;周建美
【作者单位】浙江工业大学计算机科学与技术学院杭州310023;浙江工业大学计算机科学与技术学院杭州310023;浙江工业大学计算机科学与技术学院杭州310023;南通大学计算机科学与技术学院江苏南通226019
【正文语种】中文
【中图分类】TP301
【相关文献】
1.基于长尾理论的物品协同过滤Top-N推荐算法 [J], 刘向举;袁煦聪;刘鹏程
2.基于时间和自适应TOP-N的图书推荐算法研究 [J], 韩思絮
3.一种基于标签的Top-N个性化推荐算法 [J], 马闻锴; 李贵; 李征宇; 韩子扬; 曹科研
4.基于多重降噪自编码器模型的top-N推荐算法 [J], 方义秋;俞晨曦;葛君伟
5.基于用户多样性偏好的top-N推荐算法 [J], 刘莉
因版权原因,仅展示原文概要,查看原文内容请购买。
基于局部分割的快速人脸识别

基于局部分割的快速人脸识别尉宇;罗浩【期刊名称】《科学技术与工程》【年(卷),期】2017(017)031【摘要】In view of the influence of face recognition system,such as illumination,facial expression and occlusion,etc,this paper proposes a novel fractional Fourier features method based on local segmentation for fast face recognition.Firstly,human face is separated from input image by constructing Gaussian skin color model and employing geometrical relationships to rapidly achieve the purpose of detecting potential face region.Then local initial matching and global feature methods are adopted to eliminate the impact of surroundings and improve the matching speed,meanwhile,complementary information of 2D-FrFT is taken full advantage of performing feature extraction and local LBP operator encodes its texture features.Eventually,a nearest neighbor classifier is utilized for classification.The proposed scheme is examined on public available database.The experimental results show that our proposed method is not only simple and robust,but good performance in recognition speed and rate.%针对人脸识别系统易受光照,表情与遮挡等因素的影响,提出一种基于局部分割的快速人脸识别算法.首先,建立高斯肤色模型,并融合几何特征快速实现人脸粗定位;然后,利用局部初次匹配与全局特征的方法排除背景环境对人脸检测的干扰以及减少匹配过程中的计算量,同时运用LBP算子对2D-FrFr的幅度与相位特征的互补信息进行编码;最后,采用最近邻分类器进行分类识别.本文的方法在公共人脸图像数据库上进行仿真实验.结果表明,该算法简单、鲁棒性高、在速度与准确性方面具有良好的性能.【总页数】6页(P133-138)【作者】尉宇;罗浩【作者单位】武汉科技大学信息科学与工程学院,武汉430081;武汉科技大学信息科学与工程学院,武汉430081【正文语种】中文【中图分类】TP391.41【相关文献】1.基于局部融合特征与分层增量树的快速人脸识别算法 [J], 钟锐;吴怀宇;何云2.基于局部特征的自适应快速图像分割模型 [J], 葛琦;韦志辉;肖亮;张军3.基于局部自适应先验MRF模型的快速BP图像分割算法 [J], LIU Guang-hui;REN Qing-chang;MENG Yue-bo4.基于局部灰度差异的快速自适应活动轮廓模型分割腮腺导管 [J], 邓旋;兰天俊;张明慧;陈之锋;陶谦;卢振泰5.基于改进局部协作表示的快速人脸识别算法 [J], 施志刚;邵冬华;顾钦平因版权原因,仅展示原文概要,查看原文内容请购买。
利用多级量化局部纹理特征的图像跟踪算法

利用多级量化局部纹理特征的图像跟踪算法王守觉;蒋寓文;谭乐怡【期刊名称】《计算机辅助设计与图形学学报》【年(卷),期】2015(000)002【摘要】针对传统的基于纹理特征的跟踪算法采用统计直方图描述目标,表达不够精确且计算量较大的问题,提出一种基于多级量化的局部纹理特征的点对点的图像跟踪算法。
首先定义了一种高维纹理特征,其对单个的点具有较强的描述能力;随后通过矢量运算进行点对点匹配,根据匹配得出的点集的空间位置,利用均值漂移矢量实现初步定位;最后通过连续缩放窗口比例,同时使用颜色信息验证候选窗口与原始窗口的相似度,确定目标的位置和尺度。
实验结果表明,该算法在场景复杂、噪声较大的环境中仍能准确地搜索到目标;在目标尺度变化时也具有较强的鲁棒性。
%To solve the problem of inaccuracy and large calculation of traditional histogram-based tracker, this paper proposes a local feature-based tracking algorithm using multi-scale texture descriptor for each point. A high-dimensional texture descriptor with discriminative power is defined. Vector operation is applied to points matching and primary mapping is implemented through mean-shift according to the position of spatial point set. Subsequently, the location and scale of the object is determined by verifying the similarity between candidates and original target according to color information while the window is zooming. The results show the robustness of this algorithm against clutter, noise and change in target scale.【总页数】9页(P208-216)【作者】王守觉;蒋寓文;谭乐怡【作者单位】中国科学院半导体研究所神经网络实验室北京 100083; 中国科学院苏州纳米技术与纳米仿生研究所高维仿生信息学及其应用实验室苏州 215123;中国科学院半导体研究所神经网络实验室北京 100083; 中国科学院苏州纳米技术与纳米仿生研究所高维仿生信息学及其应用实验室苏州 215123;中国科学院苏州纳米技术与纳米仿生研究所高维仿生信息学及其应用实验室苏州 215123; 同济大学电子信息与工程学院计算机系上海 200092【正文语种】中文【中图分类】TP391.4【相关文献】1.利用图像颜色特征与纹理特征进行图像检索 [J], 刘真;周淑秋2.利用局部相位量化实现图像质量评价的方法 [J], 马彦3.利用图像块数据库和纹理特征点的图像彩色化方法 [J], 吕东辉;张闯;汪世刚4.一种基于多尺度局部纹理特征和CART决策树的野外火灾火焰图像识别算法 [J], 冯丽琦;赵亚琴;孙一超;龚云荷5.基于鱼体运动特征和图像纹理特征的鱼类摄食行为识别与量化 [J], 黄志涛;何佳;宋协法因版权原因,仅展示原文概要,查看原文内容请购买。
一种人脸图像局部变形技术

一种人脸图像局部变形技术
陈粟;倪林
【期刊名称】《计算机工程与应用》
【年(卷),期】2004(040)033
【摘要】图像局部变形是指仅在图像的一小部分区域内做变形,改变某些局部范围的特征,同时保持其它区域不发生变化.目前常用的图像变形方法基本上考虑的是图像的整体变形,在直接运用于局部变形时效果不佳.文章提出了一种人脸图像局部变形方法,它首先在局部变形区域内确定特征点和影响半径,然后计算出区域像素点几何位置的变化,最后使用双线性插值原理进行灰度赋值.该方法可以获得很好的人脸局部变形效果,具有连续性好、算法简洁、实时互动等优点,在人脸识别领域有可观的应用前景.
【总页数】4页(P56-58,88)
【作者】陈粟;倪林
【作者单位】中国科学技术大学电子工程与信息科学系,合肥,230027;中国科学技术大学电子工程与信息科学系,合肥,230027
【正文语种】中文
【中图分类】TP393
【相关文献】
1.一种新颖的人脸图像超分辨率技术 [J], 吴炜;杨晓敏;陈默;何小海;郑丽贤
2.一种用于DBN图像局部变形方法的改进研究仿真 [J], 韩智慧;赵建华
3.一种改进的人脸图像超分辨率技术研究 [J], 钟东
4.一种基于面部特征点的疲劳人脸图像检测与识别改进算法研究 [J], 尹真杰;刘明方;高峰;张皓天
5.一种用于多源人脸图像检索的损失函数改进策略 [J], 任国印;吕晓琪;李宇豪因版权原因,仅展示原文概要,查看原文内容请购买。
基于RGB-D融合特征的图像分类

基于RGB-D融合特征的图像分类向程谕;王冬丽;周彦;李雅芳【期刊名称】《计算机工程与应用》【年(卷),期】2018(054)008【摘要】当前经典的图像分类算法大多是基于RGB图像或灰度图像,并没有很好地利用物体或场景的深度信息,针对这个问题,提出了一种基于RGB-D融合特征的图像分类方法.首先,分别提取RGB图像dense SIFT局部特征与深度图Gist全局特征,然后将得到的两种图像特征进行特征融合;其次,使用改进K-means算法对融合特征建立视觉词典,克服了传统K-means算法过度依赖初始点选择的问题,并在图像表示阶段引入LLC稀疏编码对融合特征与其对应的视觉词典进行稀疏编码;最后,利用线性SVM进行图像分类.实验结果表明,所提出的算法能有效地提高图像分类的精度.%The classic image classification algorithms are mostly based on RGB or grayscale images,and the depth infor-mation of the object or scene has not been utilized effectively.To solve this problem,this paper proposes an image classifi-cation method based on RGB-D fusion feature.Firstly,the dense SIFT feature of color image is fused with the global Gist feature of the depth image to generate a combined vector.Secondly,the improved K-means algorithm is used to build the visual dictionary of the fusion feature,overcoming the dependence on the initial point selection of traditional K-means algorithm. Moreover, in the stage of image representation, the approximate LLC feature coding method is introduced to operate sparse coding on feature base and its corresponding visualdictionary.Finally,the linear SVM is used for image classification.The experimental results show that the proposed algorithm can effectively improve the classification accuracy.【总页数】6页(P178-182,254)【作者】向程谕;王冬丽;周彦;李雅芳【作者单位】湘潭大学信息工程学院,湖南湘潭411100;湘潭大学信息工程学院,湖南湘潭411100;湘潭大学信息工程学院,湖南湘潭411100;湘潭大学信息工程学院,湖南湘潭411100【正文语种】中文【中图分类】TP391.4【相关文献】1.基于压缩感知理论的 RGB-D 图像分类方法 [J], 黄晓琳;薛月菊;涂淑琴;李鸿生;何金辉2.基于空谱融合特征主动学习的高光谱图像分类 [J], 王琰; 刘丽芹; 沈霞宏; 侯俊; 张宁; 史振威3.基于颜色通道融合特征的现勘图像分类算法 [J], 刘颖; 张倩楠; 王富平; 雷研博; 公衍超; 杨凡超4.一种粒子群优化融合特征的零样本图像分类算法 [J], 陈雯柏; 陈祥凤; 刘琼; 韩琥5.基于双模态融合特征的模糊语音识别研究 [J], 冯晓静;白静;薛珮芸;戎如意因版权原因,仅展示原文概要,查看原文内容请购买。
基于SIFT算法的局部特征点人脸识别图像处理技术
基于SIFT算法的局部特征点人脸识别图像处理技术
孔祥源;黄鑫鑫;肖秋霞;谢书凝
【期刊名称】《福建轻纺》
【年(卷),期】2018(000)002
【摘要】介绍一种基于尺度不变特征变换(Scale Invariant Feature Transform,SIFT)算法局部特征点的人脸识别技术.基于局部特征点目标检测算法提取的点特征通常具有良好的鲁棒性,能够适应复杂的环境变化,SIFT算法能够在图像间发生平移、旋转、噪声干扰、光照变换等条件下依然保持良好的检测性能.文章通过理论的分析和仿真实验证明SIFT算法具有较好的人脸识别性能,能够在人脸发生复杂变化的条件下准确地识别人脸.
【总页数】6页(P46-51)
【作者】孔祥源;黄鑫鑫;肖秋霞;谢书凝
【作者单位】厦门理工学院电气工程与自动化学院,福建厦门 361024;厦门理工学院电气工程与自动化学院,福建厦门 361024;厦门理工学院电气工程与自动化学院,福建厦门 361024;厦门理工学院电气工程与自动化学院,福建厦门 361024
【正文语种】中文
【中图分类】TP391.413
【相关文献】
1.基于改进SIFT算法的苗木图像特征点提取 [J], 王培珍;石磊;许睿;王雪峰
2.改进的SIFT算法在图像特征点匹配中的应用 [J], 完文韬;杨成禹
3.基于局部统计特性及SIFT算法的图像配准 [J], 冀振宁
4.基于两层策略的SAR图像局部不变特征点的匹配方法 [J], 赵爱罡;范小虎;赵乾;王建永;葛春
5.基于改进SIFT算法的建筑物图像特征点提取 [J], 邓志强; 张辉; 张凤众
因版权原因,仅展示原文概要,查看原文内容请购买。
融入CBAM的Res-UNet高分辨率遥感影像语义分割模型
融入CBAM的Res-UNet高分辨率遥感影像语义分割模型孙凌辉;赵丽科;李琛;成子怡
【期刊名称】《地理空间信息》
【年(卷),期】2024(22)2
【摘要】针对现有语义分割方法处理复杂遥感影像细节特征识别能力差、信息丢
失等问题,提出一种融合注意力机制的遥感影像语义分割网络模型。
模型主干网络
采用编码器-解码器架构的U-Net模型,为了缓解梯度和网络退化问题,将残差结构
嵌入到主干网络中;同时融入通道、空间注意力模块,兼顾影像的细节特征和模型鲁
棒性。
在ISPRS Potsdam数据集上进行分析验证,实验结果表明,在去除“噪声”、地物边缘“平滑”、细窄地物“连续”、细小目标分割等方面,融入CBAM模块的ResUNet语义分割精度要优于传统网络模型。
【总页数】3页(P68-70)
【作者】孙凌辉;赵丽科;李琛;成子怡
【作者单位】河南工业大学信息科学与工程学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.图像语义分割方法在高分辨率遥感影像解译中的研究综述
2.空间信息感知语义分割模型的高分辨率遥感影像道路提取
3.卷积神经网络和视觉注意力语义分割模型
在高分辨率遥感影像分类中的性能分析4.基于FPN Res-Unet的高分辨率遥感影像建筑物变化检测
因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于局部不变特征的图像特定场景检测方法

一种基于局部不变特征的图像特定场景检测方法谢毓湘;栾悉道;陈丹雯;张芯【期刊名称】《国防科技大学学报》【年(卷),期】2013(035)003【摘要】图像场景的自动检测,对于图像的标注以及语义检索具有非常重要的作用.本文研究根据实际应用的需要,围绕会晤、集会、海滩等八类特定场景图像的检测问题展开.首先对图像进行局部关键点的检测以及SIFT特征描述子的计算,从而提取图像的局部特征,在此基础上基于支撑向量机构建多分类器,进行特征训练,最终获得较为准确的检测结果.实验重点针对分类器核函数的确定以及特征选取策略等问题展开,实验结果表明,采用径向基核函数构建多分类器以及特征点按尺度大小排序取前n位的选取策略可以获得较为准确和鲁棒的特定场景检测结果.本方法在保证满足一定程度场景检测准确率的前提下,具有简单快速的特点,能够满足实际应用的需要.【总页数】6页(P78-83)【作者】谢毓湘;栾悉道;陈丹雯;张芯【作者单位】国防科技大学信息系统工程重点实验室,湖南长沙410073;长沙大学信息与计算科学系,湖南长沙410003;国防科技大学信息系统工程重点实验室,湖南长沙410073;国防科技大学信息系统工程重点实验室,湖南长沙410073【正文语种】中文【中图分类】TP391【相关文献】1.一种基于局部不变特征的SAR图像配准新算法 [J], 金斌;周伟;丛瑜;王国庆2.一种改进的图像局部不变特征提取方法 [J], 谭跃生;郑政宇;顾瑞春3.一种鲁棒的图像局部仿射不变特征提取方法 [J], 周韬;张茂军;熊志辉;徐玮4.基于局部色彩不变量的图像篡改检测方法 [J], 谢伟;万晓霞;叶松涛;王韬5.基于最大稳定极值区域与主要旋转不变局部二值模式的复杂场景车牌检测方法[J], 贾小云; 潘德燃因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
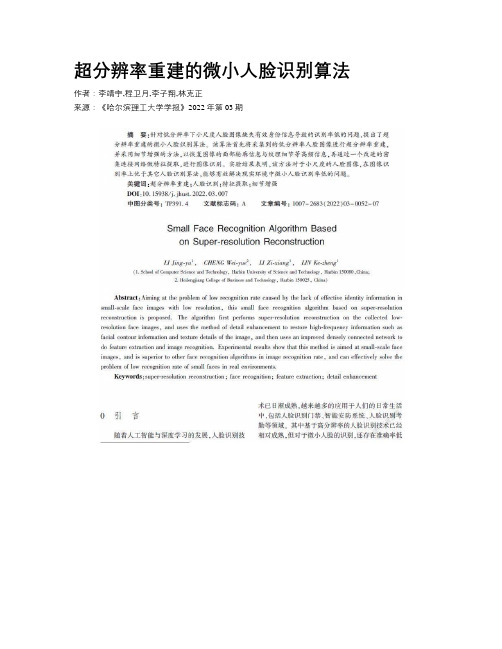
图1
算法思想
∑ ( ∑( α
j∈ I i∈ w j
i
- a j I i - b j ) 2 + ε a2 j
)
(3)
2
2. 1
本文算法
基于帧间差分的目标初提取 帧间差分是解决静态背景下运动目标检测问题的常用算
其中, 参数 ε 的作用是保证数据稳定性 。将前面获取的前景、 背景草图约束添加到此最优化问题中, 则可以通过以下线性 方程组解出前景映射图 α 矩阵: (4) ( L + λD S ) α = λb S 其中: λ 为一个常数, 用于决定用户约束所起作用的大小;D S b S 为 N × 1 维向量, 是 N × N 的对角阵, 其中 N 均为图像像素 总和。对于草图中被标记的像素,D S 的相应对角元素为 1 , b S 的对应元 其余元素为 0 。对于草图中已标记的前景像素, L 是 N × N 的稀疏矩阵, 其求解参见文 素为 1 , 其余元素为 0 。 11 ] 。 献[ 前景映射图包含了丰富的目标边缘信息, 对前景映射图 采用 Canny 算子进行边缘检测, 即可实现目标轮廓的精确提 。 取 由当前帧精确的跟踪结果, 即可建立用于生成下一帧草 图的新的颜色模型, 从而使得局部抠像可以自动地处理连续 图像序列。 2. 3 模板更新 为了在前景、 背景不断变化时保持跟踪的准确性, 还需要 进行颜色模型更新和抠像框位置更新 。 在此作出如下假设: 连续两帧的前景颜色集合和背景颜色集合具有一致性, 且目 标在下一帧位移后仍在前一帧的抠像框的范围之内 。由此模 型更新过程可以用式( 5 ) 、 式( 6 ) 表示: M Color ( C tF , C tB ) = ( target t -1 , rect t -1 ) (5) M Position ( rect t ) = φ( target t -1 ) (6) 其中: M Color 代表颜色模型,M Position 代表抠像框位置模型。 target 代表 代表局部颜色模型更新, φ 代表抠像框位置更新, rect 代表抠像框, 目标轮廓, 上标代表所在的帧数。 式( 5 ) 表 t 帧抠像所需的颜色模型由 t - 1 帧的目标轮廓、 明, 抠像框所 生成。式( 6 ) 表明, 当 t - 1 帧的目标中心被确定时, 即可由此 生成用于 t 帧抠像的抠像框, 且在整个 中心更新抠像框位置, 跟踪过程中, 抠像框大小不作变化。
收稿日期:2013-04-11 ;修回日期:2013-05-21 。 基金项目:中国博士后科学基金资助项目( 20110491415 ) ;中国民航科技项目( MHRD201124 ) 。 作者简介:程昱宇( 1989 - ) , 男, 四川绵阳人, 硕士研究生, 主要研究方向:图像处理; 钱小燕( 1979 - ) , 女, 江苏泰州人, 副教授, 博士, 主 要研究方向:图像处理、 数据融合。
1
算法思想
由于目前抠像技术需要大量用户交互, 而跟踪却是一个
像框, 算法能够自动地产生一个用于 t 帧抠像的草图。 对t帧 抠像框内每一个像素, 如果其颜色同前景颜色集 C F 中某一种 相同, 则被标记为前景像素;与此相似, 若像素点颜色同 C B 中 某一种相同, 则标记为背景。 此时生成的局部抠像草图将作 为求解目标精确轮廓的重要依据 。 2. 2. 3 基于草图的局部抠像跟踪 传统抠像技术假设输入图像是前景层 F 和背景层 B 的线 对于彩色图像往往需要人工交互对 7 个未知数的求 性组合, 解进行约束。由于目标跟踪需要实时无交互地进行, 并且只 11]中 因此本文基于文献[ 关心目标跟踪的正确性和精确性, 的思想, 利用生成的草图对抠像过程进行约束, 自动生成前景 11] 中基于每个像素周围小窗口内 F 和 B 映射图。根据文献[ 近似不变的平滑度假设, 可以导出一个新的抠像模型: (2) α i = a i I i + b i ; i ∈ w 其中:α i 为窗口 w 内第 i 个像素的透明度, 取值为 0 到 1 ;a i = 1 / ( F i - B i ) ;b i = B i / ( F i - B i ) ;I i 是第 i 个像素的灰度值;w 是 ai 、 b i 来最 任意一个小窗口, 从而抠像问题可转化为求解 α i 、 小化目标方程: J( α, a, b) =
本文通过自动生成草图完成抠像, 从而在 自动的过程。因此, 抠像和跟踪中建立起一座桥梁 。首先使用帧间差分法处理序 列前两帧, 初提取目标区域, 同时建立合适大小的抠像框, 二 者分别用于前景、 背景颜色模型的计算;由此颜色模型, 算法 可以自动生成局部抠像所需的草图;然后利用草图进行局部 获取前景映射图, 进而通过边缘检测获取目标的精确轮 抠像, 廓, 即跟踪结果;最后在此轮廓的基础上即可完成颜色模型以 从而实现持续、 精确的跟踪。算法思想如图 及抠像框的更新, 1 所示。
产生的草图为基础的抠像方法, 算法复杂性得到降低。 11] 受文献[ 中利用草图进行抠像的思想的启发, 本文提 出一种针对彩色融合图像的全自动目标跟踪算法 。算法通过 自动获取草图指导抠像过程, 再解算出目标的轮廓和方位 。 精确的抠像结果有利于准确区分前景和背景, 更好地实现模 型更新, 从而避免了跟踪中的漂移问题 。另外, 由于抠像算法
0
引言
用可见光和红外成像传感器对视频图像中指定目标进行
[1 ]
何准确地区分前景背景, 有效进行模型更新, 是鲁棒跟踪的关 键问题。 现有算法已能获取目标精确区域, 如主动轮廓线法 图像分割法
[7 ] [具挑战的研究领域
。可
以及抠像。 主动轮廓线法依赖轮廓曲线的匹
[11 ]
。另外, 现有算法往往用矩形框 、 椭圆框来表示目标所
[5 ]
在的区域
, 但现实中的目标往往不是规则的矩形或椭圆
提出了以少量用户交互
型, 比如人在运动过程中的不同姿态, 所以这样的一种分区方 式必然会导致部分背景被认为是前景的一部分, 而且当目标 或目标被遮挡时, 这样情况尤其严重。正是因 定位不甚准确, 为目标特征信息估计的不准确, 使得更新后的模型准确性降 且随着跟踪的进行, 模型的准确性会呈持续下滑趋势, 从 低, 而引起模型失真和跟踪框漂移, 最终导致跟踪失败。因此, 如
Journal of Computer Applications 计算机应用,2013,33( 10) : 2907 - 2910 文章编号:1001-9081 ( 2013 ) 10-2907-04
ISSN 1001-9081 CODEN JYIIDU
2013-10-01 http: / / www. joca. cn doi:10. 11772 / j. issn. 1001-9081. 2013. 10. 2907
[4 ]
配, 当目标出现剧烈的姿势变化时难以得到理想的跟踪效果 。 8] 文献[ 基于图像分割思想, 提出由前一帧目标轮廓匹配出 但由于该类算法仅仅利用了目标边缘信 当前帧轮廓的算法, 息而忽略了目标内部的有用信息, 所以跟踪不够精确。 在基 于必要的先验知识的情况下, 抠像的方法在获取目标轮廓方 9] 把抠像技术转化成一个贝叶斯 面具有良好的效果。文献[ 10]具有良好的抠像效 框架, 再解析出前景映射图。 文献[ 果, 但需要使用三分图作为输入, 而用户手动构造三分图却是 一项繁琐、 耗时的工作。 Levin 等
2908
计算机应用 2. 2. 2
第 33 卷 局部抠像草图的形成 C B 和抠 在 t - 1 帧时, 基于跟踪结果产生的颜色集合 C F 、
在时间上消耗过大, 为了解决与跟踪的实时性的冲突, 本文算 法提出了局部抠像的方法, 提高了跟踪算法的运行效率 。 实 验证明, 算法能够获得目标的准确轮廓, 具有优良的跟踪效 果。
Precise object tracking algorithm for fusion image based on local image matting
CHENG Yuyu ,QIAN Xiaoyan
( College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing Jiangsu 210016 ,China)
基于局部抠像技术的融合图像精确跟踪算法
程昱宇 ,钱小燕
( 南京航空航天大学 民航学院,南京 210016) ( * 通信作者电子邮箱 arrow1712@ 163. com)
*
摘
要:为了提高跟踪精度, 提出一种基于局部抠像的融合图像全自动精确跟踪算法 。 首先采用帧间差分法获
并自动生成局部抠像框 , 由此采集目标、 背景代表颜色集合; 在此基础上自动生成抠像所需 取运动目标的大致区域 , 的草图, 实现对目标的抠像;最后对抠像产生的前景映射图进行边缘检测即可获取精确的目标轮廓 , 并可根据跟踪结 果对模型进行更新。对于实验的图像序列, 与目标实际中心相比较 , 抠像跟踪误差均值为 0. 9 像素, 传统均值漂移跟 踪误差均值为 5. 2 像素。实验结果表明, 该方法跟踪结果能完整 、 清晰地表示目标轮廓, 很好地解决了跟踪中的漂移 问题, 提升了跟踪精度。 关键词:抠像;图像融合;目标跟踪;模板更新;漂移 中图分类号: TP391. 9 文献标志码:A
见光、 红外图像的融合能够将不同传感器信息融合为可信度 更高、 细节信息更完善的融合图像, 克服了单一传感器自身的 从而有利于避免因环境或其他干扰因素导致的跟踪精 局限, 度降低或目标丢失等现象 。 在实际跟踪系统中, 由于目标形态和背景环境不断变化, 当算法成功估计目标在当前帧中的位置后, 往往需要提取新 [2 - 3 ] , 的颜色、 纹理等信息以更新目标模型 如均值漂移算 法
*
Abstract: A precise object tracking algorithm for fusion image based on local image matting was proposed in this paper to improve the tracking effect. Firstly, the rough region of the moving target could be captured by the minus of the sequence s first two frames and therefore the rectangle was generated for local matting and the discriminative color set of foreground and background. Then the coarse region and the following tracking results automatically provided sufficient and accurate scribbles for matting, which made matting applicable in a tracking system. Finally accurate boundaries of the target could be obtained from matting results so that the model was successfully updated. For experimental image sequences, the mean error of the proposed algorithm was 0. 9 pixels between forecasted center and real center of target, and that of traditional meanshift was 5. 2 pixels. The experimental results show that the proposed algorithm can detect the contour of target accurately, ovviously avoids model drift and promotes precision of tracking. Key words: image matting; image fusion; object tracking; model update; drift